ПНСТ 825-2023
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
ДИНАМИЧЕСКАЯ ЦИФРОВАЯ КАРТА ДОРОЖНОГО ДВИЖЕНИЯ
Точность данных для формирования динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств
Intelligent transport systems. Dynamic digital road traffic map. Accuracy of data for formation of dynamic digital road traffic map for the movement of highly automated vehicles
ОКС 35.240.60
Срок действия с 2024-06-01
до 2027-06-01
с правом досрочного применения
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "НИИ ИТС" (ООО "НИИ ИТС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 26 декабря 2023 г. N 112-пнст
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направлять не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 125493 г.Москва, ул.Смольная, д.2 и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112, Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Динамическая цифровая карта дорожного движения является следующим этапом в развитии интеллектуальных транспортных систем, направленных на обеспечение безопасного функционирования и повышение эффективности работы транспортного комплекса при внедрении высокоавтоматизированных и беспилотных транспортных средств [1].
Функционал динамической цифровой карты дорожного движения в первую очередь позволяет обеспечить качественное функционирование высокоавтоматизированных транспортных средств (ВАТС) в пределах среды штатной эксплуатации.
Внедрение ВАТС в уже существующую, исторически сложившуюся, транспортную систему необходимо обеспечивать поэтапно, при этом повышение эффективности выполнения транспортной работы не должно снижать безопасность движения других участников дорожного движения при соблюдении ими правил дорожного движения.
Основным подходом к обеспечению безопасности дорожного движения транспортной системы, в которой присутствуют ВАТС, является обеспечение ситуационной осведомленности ВАТС за счет применения дорожно-транспортной инфраструктуры и технологий риск-менеджмента.
Повышение ситуационной осведомленности достигается путем агрегации высокоточных данных внутри динамической цифровой карты дорожного движения и построения сервисной платформы, которая содержит внутри себя детальную информацию о статических и динамических объектах дороги. Использование высокоточных данных о статических и динамических объектах дороги позволяет расширить область среды штатной эксплуатации ВАТС за счет расширения их сенсорных возможностей и горизонта прогнозирования событий, а также обеспечить контроль участников дорожного движения и их влияния на обеспечение безопасности в пределах локальной транспортной ситуации.
1 Область применения
Настоящий стандарт распространяется на интеллектуальные транспортные системы и устанавливает требования к точности данных для формирования динамической цифровой карты дорожного движения в объеме, достаточном для организации движения высокоавтоматизированных транспортных средств и повышения безопасности взаимодействия высокоавтоматизированных транспортных средств с другими участниками дорожного движения. Архитектура динамической цифровой карты дорожного движения разработана с учетом обеспечения безопасности дорожного движения и повышения эффективности транспортно-дорожного комплекса.
Настоящий стандарт распространяется на способы автоматизированного передвижения транспортных средств различных классов, которые для принятия решений о траектории и параметрах движения используют высокоточное позиционирование, бортовые сенсоры и системы, обеспечивающие передачу данных по технологиям V2X.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 33062 Дороги автомобильные общего пользования. Требования к размещению объектов дорожного и придорожного сервиса
ГОСТ Р 51256 Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования
ГОСТ Р 52282 Технические средства организации дорожного движения. Светофоры дорожные. Типы и основные параметры. Общие технические требования. Методы испытаний
ГОСТ Р 52290 Технические средства организации дорожного движения. Знаки дорожные. Общие технические требования
ГОСТ Р 52398 Классификация автомобильных дорог. Основные параметры и требования
ГОСТ Р 56829 Интеллектуальные транспортные системы. Термины и определения
ПНСТ 824-2023 Интеллектуальные транспортные системы. Динамическая цифровая карта дорожного движения. Архитектура динамической цифровой карты дорожного движения для целей движения высокоавтоматизированных транспортных средств
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 56829 и ПНСТ 824-2023.
4 Обозначения и сокращения
В настоящем стандарте применены следующие обозначения и сокращения:
V2X | - связь между транспортным средством и другим объектом (vehicle-to-everything); |
АСВ | - автоматизированная система вождения; |
ВАТС | - высокоавтоматизированное транспортное средство; |
ГНСС | - глобальные навигационные спутниковые системы; |
ДЦКДД | - динамическая цифровая карта дорожного движения; |
ИТС | - интеллектуальная транспортная система; |
К-ИТС | - кооперативная интеллектуальная транспортная система; |
ЛП ИТС | - локальный проект интеллектуальной транспортной системы; |
СВПД | - система высокоточного позиционирования дороги; |
СШЭ | - среда штатной эксплуатации; |
УДС | - улично-дорожная сеть; |
ЦКП | - цифровая картографическая подложка; |
GML | - отраслевой стандарт, используемый для описания географических данных (geographic Markup Language); |
RGB | - цветовая модель (red, green, blue). |
5 Общие положения
ДЦКДД является составной частью ИТС, которая агрегирует в себе массив данных ключевых объектов и слоев, необходимых для повышения ситуационной осведомленности ВАТС на дорогах общего пользования.
Настоящий стандарт содержит требования к группе слоев "Высокоточные данные УДС и дороги" в соответствии с ПНСТ 824-2023.
Одной из главных задач обеспечения безопасного функционирования ВАТС на дорогах общего пользования является обеспечение обмена высокоточными данными или их производными между ДЦКДД и ВАТС.
6 Требования к данным сред штатной эксплуатации разных типов
6.1 Требования к объектам и инфраструктуре среды штатной эксплуатации первого типа
СШЭ первого типа - условия окружающей дорожной обстановки и конструктивные особенности ВАТС, при которых ВАТС в процессе своего движения полагается только на бортовые сенсоры, внутренние цифровые карты самого ВАТС и встроенные алгоритмы обработки получаемых данных.
В СШЭ первого типа отсутствует информационная поддержка со стороны интеллектуальной дорожной инфраструктуры. ДЦКДД не функционирует.
При эксплуатации ВАТС в данной СШЭ скоростные параметры ВАТС должны быть ограничены максимальным значением динамического габарита, зависящего от расстояния остановочного пути, меньшего, чем максимальная граница уверенного распознавания объектов имеющимися сенсорами с учетом возможного появления других участников дорожного движения.
6.2 Требования к объектам и инфраструктуре среды штатной эксплуатации второго типа
СШЭ второго типа - условия окружающей дорожной обстановки и конструктивные особенности ВАТС, при которых ВАТС в процессе своего движения полагается на сенсоры и актуальную цифровую карту местности высокого разрешения.
Информационная поддержка со стороны интеллектуальной дорожной инфраструктуры осуществляется за счет базовых сервисов ИТС, предоставления высокоточной карты ДЦКДД и сервиса СВПД.
Архитектура ДЦКДД включает слой "Высокоточные данные УДС и дороги".
Архитектура ДЦКДД может содержать слой "Данные элементов ИТС".
При эксплуатации в пределах данной СШЭ АСВ ВАТС прогнозирует возможность появления помех и регулирует скорость движения ВАТС, исходя из особенностей наличия и расположения объектов на карте и общей информации для повышения ситуационной осведомленности.
СШЭ должна иметь набор атрибутов, получаемых из всех слоев данных формирования ДЦКДД:
- данные атрибутов элементов дороги со смещением координат не более 50 мм;
- данные атрибутов объектов придорожного сервиса и инфраструктуры со смещением координат не более 50 мм;
- данные атрибутов объектов графа дорог со смещением координат проекции не более 5 мм;
- данные атрибутов элементов ИТС;
- данные атрибутов элементов К-ИТС;
- тип дороги (по ГОСТ Р 52398);
- скоростные ограничения в соответствии с текущим планом организации дорожного движения;
- геопривязанная информация о локации (район, область) с точностью не хуже 100 мм.
6.3 Требования к объектам и инфраструктуре среды штатной эксплуатации третьего типа
СШЭ третьего типа - условия окружающей дорожной обстановки и конструктивные особенности ВАТС, при которых ВАТС в процессе своего движения полагается на сенсоры и актуальную цифровую карту местности высокого разрешения, а также обеспечение сетевого взаимодействия V2X ВАТС с интеллектуальной дорожной инфраструктурой и другими участниками дорожного движения.
Информационная поддержка со стороны интеллектуальной дорожной инфраструктуры осуществляется за счет существующих сервисов ЛП ИТС, постоянного обмена данными с ДЦКДД, предоставления сервисов ДЦКДД и сервиса СВПД.
При эксплуатации в пределах данной СШЭ АСВ ВАТС должна иметь полную картину дорожной ситуации с прогнозом развития на необходимый период. Безопасное движение возможно с максимальной скоростью, которую обеспечивает дорожная инфраструктура и регламентируют правила дорожного движения.
СШЭ должна иметь перечень атрибутов из объектов и слоев, приведенных в 6.2, а также дорожно-транспортную инфраструктуру для организации взаимодействия V2X.
7 Требования к высокоточным данным улично-дорожной сети и дороги
7.1 Требования к исходным данным элементов дороги и геодезических замеров
7.1.1 Требования к слою "Облако точек лазерного сканирования" (точек лидарных данных)
Облако точек лазерного сканирования должно содержать следующие данные:
- для каждой точки значения локальных координат x, y, z с точностью не ниже 5 мм в локальной системе координат;
- данные, позволяющие обеспечить привязку к глобальной системе координат с точностью не ниже 50 мм в плане и 100 мм по высоте;
- данные, позволяющие выполнить синхронизацию по времени с расхождением от эталонного времени, не превышающим 0,001 с. Рекомендуемый формат - UTM;
- параметры, позволяющие провести калибровку взаимного расположения.
Дополнительно рекомендуется включение в состав слоя "Облако точек лазерного сканирования" следующих данных:
- для каждой точки значение показателей "величина отражения" r и "нормаль" h;
- функции расчета значений r и h;
- для каждой точки внутренние параметры лидарной системы, позволяющие вычислить координаты точки;
- функции пересчета внутренних параметров лидарной системы в координаты точки.
Требования к оборудованию:
- использование не менее двух лазерных сканеров для снижения количества теневых зон;
- число измерений лазерного сканера - не менее 300000 в секунду;
- точность данных инерциальной навигационной системы - не более 20 мм;
- формат выходных данных - LAS/LAZ.
7.1.2 Требования к слою "Данные геодезических замеров"
Слой "Данные геодезических замеров" содержит координаты точек структурных линий дороги в глобальной системе координат с точностью не хуже 50 мм в плане и 100 мм по высоте, а также параметры, позволяющие определить, какой структурной линии принадлежат точки.
7.1.3 Требования к слою "Геопривязанные фотоматериалы"
Слой "Геопривязанные фотоматериалы" содержит:
- точность взаимной синхронизации лидарных и видеокадров не хуже 0,001 с;
- частоту кадров в секунду не менее 10 и не менее 1 кадра на метр;
- калибровочные данные камер на нелинейность;
- калибровочные данные камер на взаимную ориентацию в пространстве;
- геопривязку снимков для совмещения с облаком точек с точностью в глобальной системе координат не хуже 50 мм в плане и 100 мм по высоте.
Дополнительно слой "Геопривязанные фотоматериалы" может содержать:
- видеоматериалы, кодированные открытым кодеком (VP9, AV1 или аналоги), с записью материала без потери кадров и частотой не менее 24 кадров в секунду.
Слой "Геопривязанные фотоматериалы" должен позволять выполнить RGB раскраску лидарного облака точек.
Требования к оборудованию:
- панорамная камера с 90% покрытием полной сферы;
- разрешение матрицы - не менее 30 Мп;
- формат данных - jpeg (jpg), tiff, bmp, png.
7.2 Требования к слою "Результаты диагностики и оценки технического состояния дорог"
Результаты диагностики представляют в качестве точечных, линейных либо площадных объектов с необходимыми атрибутами в формате shp (или аналогичных форматах) с координатной привязкой.
Слой "Результаты диагностики и оценки технического состояния дорог" используют при построении карты местности с отображением дефектов дорожного полотна.
Погрешность измерений при проведении диагностики и оценки технического состояния дорог - не ниже 100 мм.
Рекомендуемая величина погрешности измерений при проведении диагностики и оценки технического состояния дорог составляет не более 10 мм.
7.3 Требования к слою "Данные высокоточной карты"
Данный слой содержит как растровые, так и векторные объекты. Растровые объекты содержатся в слое "Фоновые данные" и в слое "Цифровая картографическая подложка". Остальные слои содержат векторные объекты.
Векторные объекты могут быть точечными, линейными, площадными и объемными.
К точечным объектам относятся знаки, светофоры, узлы графа, узлы траекторий движения ВАТС.
К линейным объектам относятся разметка, дуги графа, дуги траекторий движения ВАТС.
К площадным объектам относятся объекты придорожной инфраструктуры и сервиса.
К объемным объектам относятся сложные инженерные объекты, П-образные и Г-образные опоры.
7.3.1 Требования к слою "Фоновые данные"
Фоновые данные необходимо создавать на основе цифровых планов городов в растровом формате в соответствии со следующими требованиями:
- число точек на дюйм - не менее 300;
- цветовое пространство RGB, CMYK.
Растровое представление позиционирует объекты, указывая их положение в соответствующей прямоугольной матрице единообразно для всех типов пространственных объектов.
7.3.2 Требования к слою "Цифровая картографическая подложка"
Исходную информацию для составления цифровых карт получают методами высокоточных спутниковых геодезических измерений с применением ГНСС-приемников и сети спутниковых базовых станций с точностью измерений не ниже 50 мм в плане.
ЦКП должна содержать актуальный план организации дорожного движения, а также сведения об условиях движения и текущей дорожно-транспортной обстановке с точностью в плане не более 50 мм.
К цифровым сведениям об условиях движения, характеризующих текущую дорожно-транспортную обстановку, относятся:
- препятствия;
- дорожно-транспортные происшествия;
- зона неблагоприятных погодных условий;
- дефекты дорожного покрытия.
7.3.3 Требования к слою "Данные дороги"
Точность данных дороги должна соответствовать следующим требованиям:
- смещение координат начала и конца линий в плане - не более 50 мм, по высоте - не более 100 мм;
- угол смещения относительно реального объекта в плане - не более 0,1 градуса;
- погрешности каждой точки линии - не хуже 50 мм в плане.
Требования к параметрам слоя "Дорожные знаки":
- координаты центра нижней кромки знака, погрешность в плане - не более 50 мм, по высоте - не более 100 мм;
- тип знака по ГОСТ Р 52290;
- типоразмер знака по ГОСТ Р 52290;
- высота до нижней кромки знака, погрешность не более 100 мм.
Требования к слою "Светофоры":
- координаты центра нижней кромки светофора, погрешность в плане - не более 50 мм, по высоте - не более 100 мм;
- тип и исполнение светофора по ГОСТ Р 52282;
- параметры конструкции по ГОСТ Р 52282;
- диаметр выходной апертуры сигналов светофора по ГОСТ Р 52282;
- высота до верхней кромки, погрешность - не более 100 мм;
- высота до нижней кромки, погрешность - не более 100 мм;
- текущее значение сигнала с временной отметкой.
Требования к слою "Дорожная разметка":
- координаты начала и конца осевой линии полосы движения, смещение координат начала и конца линий в плане - не более 50 мм, по высоте - не более 100 мм;
- множество точек или функция осевой линии полосы движения, погрешность угла смещения относительно реального объекта в плане - не более 0,1 градуса, погрешность каждой точки линии - не хуже 50 мм в плане (см. рисунок 1);
- ширина линий;
- тип разметки по ГОСТ Р 51256;
- цвет разметки.
7.3.4 Требования к слою "Объекты придорожной инфраструктуры и сервиса"
Перечень объектов придорожной инфраструктуры приведен в ГОСТ 33062.
Объекты придорожной инфраструктуры и сервиса должны содержать следующие параметры:
- координаты точек углов объекта в плане;
- геометрические размеры (длина, ширина, высота);
- материал поверхности объекта.
Точность параметров объектов придорожной инфраструктуры и сервиса должна соответствовать следующим требованиям (см. рисунок 2):
- смещение координат углов - не более 50 мм;
- углы смещения ребер относительно реальных объектов - не более 1 градуса;
- погрешность высоты - не более 10% от реальной высоты объекта либо не более 100 мм.
 |
Рисунок 1 - Параметры точности разметки
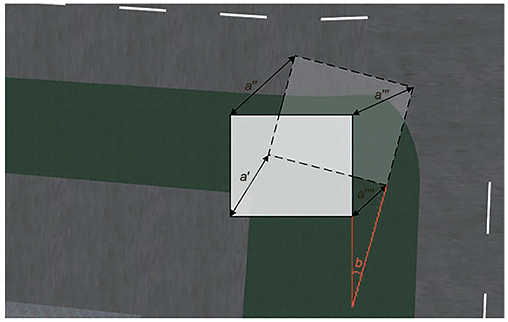 |
Рисунок 2 - Параметры точности объектов придорожной инфраструктуры и сервиса
7.3.5 Требования к слою "Граф дорог"
Граф дорог представляется в виде векторной модели в формате GML или JSON и состоит из следующих объектов:
- рамки исходной карты;
- дуг сети;
- узлов сети;
- осевых линий полос движения.
Каждый из объектов должен содержать следующий набор атрибутов:
- координаты опорной точки с допустимым смещением не более 50 мм;
- длину прямой со смещением координат проекции не более 50 мм;
- угол и радиус поворота дуги со смещением не более 0,1 градуса;
- угол смещения рамки исходной карты не более 50 мм;
- угол смещения ребра относительно осевой линии не более 1 градуса.
7.4 Требования к слою "Траектории движения ВАТС"
Слой "Траектории движения ВАТС" содержит траектории движения ВАТС, являющиеся ориентированным связанным графом, который по своей структуре состоит из объектов "Узел траектории движения ВАТС" и "Дуга траектории движения ВАТС".
Требования к параметрам объекта "Узел траектории движения ВАТС" приведены в таблице 1.
Таблица 1 - Параметры объекта "Узел траектории движения ВАТС"
Название атрибута | Тип данных | Требование к точности |
Географическая широта | Число с двойной точностью | Точность вычисления координат: 20 мм |
Географическая долгота | Число с двойной точностью | Точность вычисления координат: 20 мм |
Географическая высота над уровнем моря | Число с двойной точностью | Точность вычисления координат: 100 мм |
Требования к параметрам объекта "Дуга траектории движения ВАТС" приведены в таблице 2.
Таблица 2 - Параметры объекта "Дуга траектории движения ВАТС"
Название параметра | Тип данных | Требования к точности |
Код первого узла по ходу движения | Целое число | Не предъявляется |
Код второго узла по ходу движения | Целое число | Не предъявляется |
Код типа дорожной разметки (или опорной линии дороги) слева | Целое число | Не предъявляется |
Код типа дорожной разметки (или опорной линии дороги) справа | Целое число | Не предъявляется |
Длина дуги (пути) | Число с двойной точностью | Не менее 200 мм |
Код типа дуги | Целое число | Не предъявляется |
Скоростное ограничение в первом узле | Целое число | Не предъявляется |
Скоростное ограничение во втором узле | Целое число | Не предъявляется |
Динамическое скоростное ограничение в первом узле | Целое число | Не менее 10 км/ч |
Динамическое скоростное ограничение во втором узле | Целое число | Не менее 10 км/ч |
Рекомендуемая скорость в первом узле | Целое число | Не предъявляется |
Рекомендуемая скорость во втором узле | Целое число | Не предъявляется |
Ширина полосы в первом узле | Число с двойной точностью | Не менее 50 мм |
Ширина полосы во втором узле | Число с двойной точностью | Не менее 50 мм |
Код участка опорной линии дороги | Целое число | Не предъявляется |
Библиография
[1] | Распоряжение Правительства Российской Федерации от 25 марта 2020 г. N 724-р "О Концепции обеспечения безопасности дорожного движения с участием беспилотных транспортных средств на автомобильных дорогах общего пользования" |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: интеллектуальные транспортные системы, динамическая цифровая карта дорожного движения, точность данных, высокоавтоматизированные транспортные средства | |
