
ГОСТ Р 58824-2020
(ИСО 15622:2018)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Автомобильные транспортные средства
СИСТЕМЫ АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ
Общие технические требования и методы испытаний
Motor vehicles. Adaptive cruise control systems. Performance requirements and test procedures
ОКС 35.240.60
Дата введения 2021-04-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 056 "Дорожный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 16 октября 2020 г. N 865-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 15622:2018* "Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля. Требования к эксплуатационным характеристикам и методы испытаний" (ISO 15622:2018 "Intelligent transport systems - Adaptive cruise control systems - Performance requirements and test procedures", МОD) путем изменения отдельных фраз, слов, ссылок, которые выделены в тексте курсивом**, а также путем изменения его структуры для приведения в соответствие с ГОСТ 1.5-2001 (подразделы 4.2 и 4.3).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей.
** В оригинале обозначения и номера стандартов и нормативных документов в разделе "Предисловие" приводятся обычным шрифтом; отмеченные в разделе "Предисловие" знаком "**" и остальные по тексту документа выделены курсивом. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
Внесение указанных технических отклонений направлено на учет особенностей объекта стандартизации, характерных для Российской Федерации, и целесообразности использования ссылочных национальных стандартов вместо ссылочных международных стандартов.
Сопоставление структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении ДА
5 ВЗАМЕН ГОСТ Р ИСО 15622-2017; ГОСТ Р ИСО 22179-2017
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации"**. Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Основной функцией системы адаптивного круиз-контроля является управление продольной скоростью движения оснащенного ею рассматриваемого транспортного средства категорий M и N согласно [1], обладающего уровнями автоматизации 0-2 по ГОСТ Р 58823 в зависимости от продольной скорости движения целевого транспортного средства, используя информацию:
а) о расстоянии до целевого транспортного средства;
б) движении рассматриваемого транспортного средства;
в) командах водителя рассматриваемого транспортного средства.
На основе полученной информации контроллер системы адаптивного круиз-контроля посылает команды на исполнительные механизмы для реализации стратегии управления продольным движением, а также информацию о статусе системы водителю рассматриваемого транспортного средства.
Могут быть реализованы следующие стратегии управления:
- поддержание постоянной скорости движения, в том числе на затяжных спусках;
- поддержание постоянной дистанции до целевого транспортного средства, в том числе в условиях плотного транспортного потока.
Опционально водитель может выбрать настройку скоростного режима из набора, предложенного бортовым устройством.
Целью адаптивного круиз-контроля является частичная автоматизация управления продольным движением рассматриваемого транспортного средства для снижения нагрузки на водителя приемлемым способом. Системы адаптивного круиз-контроля делятся на два основных типа: системы адаптивного круиз-контроля в полном диапазоне скоростей и системы адаптивного круиз-контроля в ограниченном диапазоне скоростей.
Настоящий стандарт может использоваться в качестве стандарта системного уровня другими стандартами, более подробно раскрывающими структуру и функциональные возможности адаптивного круиз-контроля, например уточнения концепции обнаружения или концепции датчиков более высокого уровня функциональности. Таким образом, в настоящем стандарте не рассматриваются специфические требования к функциям датчиков по обнаружению, различению и определению расстояния до целевых объектов, а также характеристики линий связи для кооперативных решений.
Система адаптивного круиз-контроля функционирует в рамках объективных ограничений, определенных в стандарте, и не освобождает водителя от обязанности контролировать дорожную обстановку. Ответственность за безопасность движения несет водитель. На транспортном средстве, оснащенном системой(ами) круиз-контроля, водитель должен постоянно оценивать дорожную обстановку для корректировки направления и скорости движения транспортного средства во избежание дорожно-транспортных происшествий.
1 Область применения
Настоящий стандарт распространяется на систему(ы) адаптивного круиз-контроля (далее - САКК), устанавливаемую(ые) на транспортные средства (далее - ТС) категорий M и N в соответствии с [1], обладающие уровнями автоматизации 0-2 по ГОСТ Р 58823. Настоящий стандарт устанавливает общие требования к САКК и методы их испытаний.
Настоящий стандарт содержит основную стратегию управления, минимальные требования к функциям, основные элементы интерфейса водителя, минимальные требования по диагностике и реакции на сбои и отказы, а также процедуры испытаний эксплуатационных характеристик САКК.
САКК подразделяют на САКК, работающие в полном диапазоне скоростей (далее - САКК ПДС), и САКК, работающие в ограниченном диапазоне скоростей (далее - САКК ОДС). САКК ОДС подразделяют на два типа: использующие сцепление с механическим и автоматическим приводом. САКК в основном предназначены для обеспечения управления скоростью рассматриваемых ТС при движении по автомагистралям (дорогам, движение по которым немоторизованных ТС и пешеходов запрещено) при отсутствии дорожных затруднений и для САКК ПДС, а также в условиях затрудненного движения. СAКК может быть дополнена другими функциями, такими как предупреждение о препятствиях перед рассматриваемым (оснащенным САКК) ТС. САКК ПДС будет пытаться остановить РТС за целевым (отслеживаемым) ТС в пределах ограниченных возможностей замедления и будет вновь активирована после того, как водитель возобновит движение.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие документы:
ГОСТ 14254 (IEC 60529:2013) Степени защиты, обеспечиваемые оболочками (Код IP)
ГОСТ 15150 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 33991 Электрооборудование автомобильных транспортных средств. Электромагнитная совместимость. Помехи в цепях. Требования и методы испытаний
ГОСТ Р 50607 (ИСО 10605:2008) Совместимость технических средств электромагнитная. Транспорт дорожный. Методы испытаний для электрических помех от электростатических разрядов
ГОСТ Р 51318.25 Совместимость технических средств электромагнитная. Транспортные средства, моторные лодки и устройства с двигателями внутреннего сгорания. Характеристики индустриальных радиопомех. Нормы и методы измерений для защиты радиоприемных устройств, размещенных на подвижных средствах
ГОСТ Р 58497 (ИСО 15008:2017) Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению визуальной информации внутри транспортного средства и методы проверки их выполнения
ГОСТ Р 58823 Автомобильные транспортные средства. Системы автоматизации вождения. Классификация и определения
ГОСТ Р ИСО 15623 Интеллектуальные транспортные системы. Системы предупреждения столкновений с движущимся впереди транспортным средством. Требования к эксплуатационным характеристикам и методы испытания
ГОСТ Р ИСО 22178 Интеллектуальные транспортные системы. Низкоскоростные системы слежения. Требования к эксплуатации и процедуре испытаний
СП 34.13330 "СНиП 2.05.02-85 Автомобильные дороги"
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов (сводов правил) в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный документ, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого документа с учетом всех внесенных в данную версию изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то рекомендуется использовать версию этого документа с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку. Сведения о действии сводов правил целесообразно проверить в Федеральном информационном фонде стандартов.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 активное торможение: Функция применения тормозов без участия водителя под управлением САКК.
3.2 адаптивный круиз-контроль; АКК: Усовершенствованная система обычного круиз-контроля, позволяющая оборудованному САКК рассматриваемому ТС следовать за целевым ТС на безопасном расстоянии, управляя двигателем, трансмиссией и тормозами.
3.3 тормозная система: Совокупность конструктивных элементов, обеспечивающая создание сил, препятствующих началу или продолжению движения рассматриваемого ТС.
Примечания
1 Тормозная система может содержать фрикционный тормоз (в котором силы возникают в результате трения между двумя частями рассматриваемого ТС, движущимися относительно друг друга); электрический тормоз (когда силы возникают в результате электромагнитного действия между двумя частями рассматриваемого ТС, движущимися относительно друг друга, но не в контакте друг с другом); гидравлический тормоз (когда силы возникают в результате действия жидкости, находящейся между двумя частями рассматриваемого ТС, движущимися относительно друг друга); моторный тормоз (когда эти силы возникают в результате искусственного увеличения тормозящего действия двигателя, передающегося на колеса).
2 В настоящем стандарте устройства управления трансмиссией не относят к тормозным системам.
3.4 дистанция: Расстояние между задней поверхностью целевого ТС и передней поверхностью рассматриваемого ТС.
3.5 обычный круиз-контроль: Система, способная поддерживать скорость ТС, заданную водителем.
3.6 впереди идущее транспортное средство; ВИТС: ТС, движущееся впереди рассматриваемого ТС в том же направлении, находящееся в поле обзора САКК рассматриваемого ТС.
3.7 свободный транспортный поток: Плавно движущийся транспортный поток, в котором исключены режимы движения "остановка-движение" и "экстренное торможение".
3.8 ![]() дистанция
дистанция : Интервал времени, за которое рассматриваемое ТС при текущей скорости преодолело бы расстояние, равное текущей дистанции между рассматриваемым ТС и целевым ТС.
Примечание - ![]() дистанцию вычисляют путем деления дистанции с на скорость рассматриваемого ТС v (см. рисунок 1).
дистанцию вычисляют путем деления дистанции с на скорость рассматриваемого ТС v (см. рисунок 1).
|

1 - рассматриваемое ТС; 2 - целевое ТС; с - дистанция; v - скорость рассматриваемого ТС
Рисунок 1 - ![]() дистанция
дистанция
3.9 установленная скорость: Желаемая скорость движения, устанавливаемая либо водителем рассматриваемого ТС, либо некоторой системой управления, внешней по отношению к САКК.
Примечание - Установленная скорость является максимально желаемой скоростью рассматриваемого ТС, двигающегося под управлением САКК.
3.10 стационарный режим: Условие, при котором значение описываемого параметра рассматриваемого ТС не изменяется во времени, по расстоянию и т.д.
3.11 рассматриваемое транспортное средство; РТС: ТС категорий M и N, обладающее уровнем автоматизации 0-2 и оборудованное САКК ПДС или САКК ОДС.
Примечание - Категории M и N - в соответствии с [1], уровни 0-2 - в соответствии с ГОСТ Р 58823.
3.12 состояние системы адаптивного круиз-контроля: Одно из нескольких состояний работы САКК.
Примечание - См. 6.1.
3.12.1 выключенное состояние САКК: Состояние, в котором прямой доступ для перевода САКК в активное состояние отключен.
3.12.2 состояние ожидания САКК: Состояние, в котором САКК не осуществляет управление продольным движением РТС и готова к активации водителем.
3.12.3 активное состояние САКК: Состояние, в котором САКК осуществляет контроль скорости и/или дистанции.
3.12.4 активное состояние следования САКК: Состояние САКК, при котором она поддерживает дистанцию до целевого ТС в соответствии с выбранной ![]() дистанцией.
дистанцией.
3.12.5 состояние контроля скорости САКК: Состояние, в котором САКК поддерживает установленную скорость.
3.12.6 состояние удержания САКК ПДС: Состояние, при котором САКК ПДС активна во время остановки.
3.13 целевое транспортное средство; ЦТС: Механическое ТС, движущееся впереди РТС в том же направлении, по той же полосе проезжей части и находящееся в поле обзора САКК РТС.
3.14 стационарный объект: Объект, находящийся в неподвижном состоянии впереди РТС.
3.15 медленно движущийся объект: Объект, движущийся впереди РТС со скоростью, меньшей чем 1 м/с, или 10% от скорости РТС, в направлении, совпадающем с направлением движения РТС, в зависимости от того, какое из этих значений больше.
3.16 система адаптивного круиз-контроля в полном диапазоне скоростей; САКК ПДС: Группа систем адаптивного круиз-контроля, которые позволяют РТС следовать за ЦТС с безопасной дистанцией, осуществляя управление двигателем и/или силовым приводом с замедлением до полной остановки.
3.17 система адаптивного круиз-контроля в ограниченном диапазоне скоростей; САКК ОДС: Группа САКК, которые позволяют РТС следовать за ЦТС с безопасной дистанцией, осуществляя управление двигателем и/или силовым приводом с замедлением до минимально установленной скорости.
3.18 встроенное устройство: Устройство, установленное производителем РТС, которое поддерживает заданное САКК значение скорости РТС без активного взаимодействия с внешними устройствами.
3.19 различение: Восприятие САКК двух ЦТС, расположенных в непосредственной близости один от другого, как двух разных ТС.
4 Обозначения и сокращения
В настоящем стандарте использованы следующие обозначения и сокращения:
![]() - максимально допустимое поперечное ускорение на непрямолинейном участке дороги;
- максимально допустимое поперечное ускорение на непрямолинейном участке дороги;
![]() - продольное ускорение ЦТС при проведении испытаний на автоматическую остановку;
- продольное ускорение ЦТС при проведении испытаний на автоматическую остановку;
с - дистанция между ТС;
![]() - минимальная дистанция в стационарном режиме;
- минимальная дистанция в стационарном режиме;
![]() - дистанция, в пределах которой не требуется обнаружение ЦТС;
- дистанция, в пределах которой не требуется обнаружение ЦТС;
![]() - дистанция, в пределах которой не требуется ни измерения расстояния, ни определения относительной скорости;
- дистанция, в пределах которой не требуется ни измерения расстояния, ни определения относительной скорости;
![]() - измеряемая дистанция;
- измеряемая дистанция;
![]() - максимальное значение дистанции, определяемой на прямолинейных участках дорог;
- максимальное значение дистанции, определяемой на прямолинейных участках дорог;
R - радиус окружности, радиус кривой;
![]() - минимальный радиус кривой;
- минимальный радиус кривой;
v - реальная скорость РТС относительно земли;
![]() - максимальная скорость на непрямолинейном участке дороги при заданном поперечном ускорении
- максимальная скорость на непрямолинейном участке дороги при заданном поперечном ускорении ![]() ;
;
![]() - скорость ТС в начале непрямолинейного участка с радиусом R;
- скорость ТС в начале непрямолинейного участка с радиусом R;
![]() - минимальная скорость, при которой допускается ускорение в автоматическом режиме;
- минимальная скорость, при которой допускается ускорение в автоматическом режиме;
![]() - максимальная выбираемая для установки скорость;
- максимальная выбираемая для установки скорость;
![]() - минимальная выбираемая для установки скорость;
- минимальная выбираемая для установки скорость;
![]() - скорость ЦТС при проведении испытаний на автоматическую остановку;
- скорость ЦТС при проведении испытаний на автоматическую остановку;
![]() - скорость ТС в конце испытания;
- скорость ТС в конце испытания;
![]() - максимальная скорость ТС;
- максимальная скорость ТС;
![]() - скорость ТС в начале испытания;
- скорость ТС в начале испытания;
-
![]() дистанция между ТС;
дистанция между ТС;
![]() - максимально возможная в стационарном режиме
- максимально возможная в стационарном режиме ![]() дистанция при данной скорости v;
дистанция при данной скорости v;
![]() - максимальная выбираемая
- максимальная выбираемая ![]() дистанция;
дистанция;
![]() - минимальная выбираемая
- минимальная выбираемая ![]() дистанция;
дистанция;
АБС - антиблокировочная (тормозная) система;
КИМ - коэффициент испытательной мишени (для инфракрасных отражателей);
ПБС - противобуксовочная система;
ЭПО - эффективная площадь отражения (радиолокационных волн).
5 Классификация и функциональные элементы
5.1 Типы систем адаптивного круиз-контроля
Различные конфигурации исполнительных механизмов для управления продольным движением ТС приводят к различиям в поведении системы.
Классификация САКК приведена в таблице 1.
Таблица 1
Тип САКК | Тип привода сцепления | Диапазон рабочих скоростей |
САКК ПДС | Автоматический | Полный диапазон скоростей |
САКК ОДС 1 | Механический | Минимальная рабочая скорость |
САКК ОДС 2 | Автоматический | Минимальная рабочая скорость |
Возможность замедления посредством САКК должна быть четко указана в руководстве по эксплуатации РТС. Все типы используют управление активным торможением. Процедура передачи управления водителю должна быть обеспечена четко и понятно (см. 6.3.1).
5.2 Функциональные элементы системы адаптивного круиз-контроля
Функциональные элементы САКК показаны на рисунке 2.
|
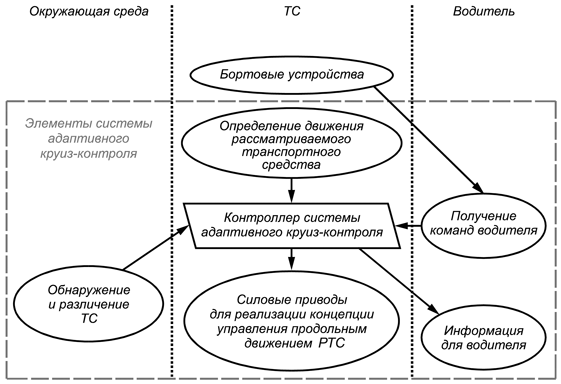
Рисунок 2 - Функциональные элементы системы адаптивного круиз-контроля
6 Требования
6.1 Базовая стратегия управления
САКК должны как минимум обеспечивать следующие стратегии управления и переходы между состояниями:
а) при нахождении САКК в активном состоянии скорость РТС должна контролироваться автоматически, либо поддержанием дистанции до ЦТС, либо поддержанием установленной скорости, в зависимости от того, какая скорость ниже; переход между двумя данными стратегиями управления осуществляется автоматически с помощью САКК;
б) дистанция при стационарном режиме может быть установлена системой либо водителем РТС (см. 6.3.1);
в) при наличии более одного ВИТС одно из них должно быть выбрано в качестве ЦТС автоматически (см. 6.2.3.3);
г) состояние системы должно быть изменено с активного состояния следования на состояние удержания в течение не более 3 с с момента остановки РТС (только для САКК ПДС);
д) в состоянии удержания должно осуществляться автоматическое управление тормозной системой для удержания РТС в неподвижном состоянии (только для САКК ПДС);
е) переход САКК из состояния ожидания в активное состояние должен быть запрещен, если скорость РТС ниже минимальной рабочей скорости ![]() . Если скорость РТС падает ниже
. Если скорость РТС падает ниже ![]() при нахождении системы в активном состоянии, автоматическое ускорение должно быть заблокировано. Опционально САКК может переключаться из активного состояния в состояние ожидания (см. 6.3.2 и 6.4) (только для САКК ОДС).
при нахождении системы в активном состоянии, автоматическое ускорение должно быть заблокировано. Опционально САКК может переключаться из активного состояния в состояние ожидания (см. 6.3.2 и 6.4) (только для САКК ОДС).
|

________________
* Вручную либо автоматически после самодиагностики.
![]() - состояние системы;
- состояние системы; ![]() - состояние системы для САКК ПДС
- состояние системы для САКК ПДС
Рисунок 3 - Состояния и переходы системы адаптивного круиз-контроля
6.2 Функциональность
6.2.1 Состояния системы
Переход между состояниями (состояние следования или состояние регулирования скорости) должен осуществляться автоматически.
6.2.2 Стационарные или медленно движущиеся объекты
Реагирование на присутствие стационарных или медленно движущихся объектов не является обязательным требованием к САКК. Если система не предназначена для такого реагирования, водитель должен быть проинформирован об этом, как минимум, в руководстве по эксплуатации РТС.
CАКК ПДС и САКК ОДС могут попытаться остановить РТС, если ранее отслеживаемое ЦТС начало останавливаться, с учетом их возможностей по интенсивности замедления.
6.2.3 Возможности состояния следования
6.2.3.1 Основные положения
Минимальная выбираемая ![]() дистанция
дистанция ![]() - это минимальный интервал времени, который выбирается для режима "следование за ЦТС" в стационарном режиме для всех скоростей v.
- это минимальный интервал времени, который выбирается для режима "следование за ЦТС" в стационарном режиме для всех скоростей v. ![]() должен быть
должен быть 0,8 с.
Следует обеспечить по меньшей мере одну установку ![]() дистанции
дистанции от 1,5 до 2,2 с для скоростей свыше 8 м/с.
В условиях стационарного режима минимальная дистанция между ТС должна выбираться как максимальное значение из ![]() ,
, ![]() .
.
В условиях переходного режима дистанция между РТС и ЦТС может временно уменьшиться ниже минимального значения. В таких случаях система должна отрегулировать дистанцию до значения ![]() .
.
Все САКК ПДС и те САКК ОДС, которые пытаются остановиться за останавливающимся ЦТС (см. 6.2.2), как минимум должны быть способны, начиная со следующего стационарного режима, остановить РТС за постепенно останавливающимся ЦТС, которое тормозит с ускорением ![]() , при скорости ниже
, при скорости ниже ![]() (см. 10.3.2). При этом принимают:
(см. 10.3.2). При этом принимают:
![]() =10 м/с;
=10 м/с;
![]() =-2,5 м/с
=-2,5 м/с.
САКК должна иметь функции определения расстояния (см. рисунок 4), целевого ТС (см. рисунок 5) и возможность работать на непрямолинейных участках дорог (см. 6.2.3.4).
|
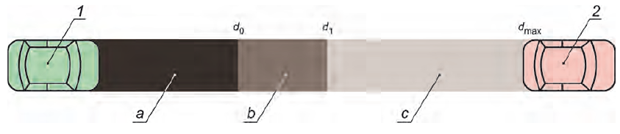
1 - РТС; 2 - ЦТС; а - обнаружение не требуется; b - требуется обнаружение ЦТС; с - требуется определение расстояния
Рисунок 4 - Зоны обнаружения
|
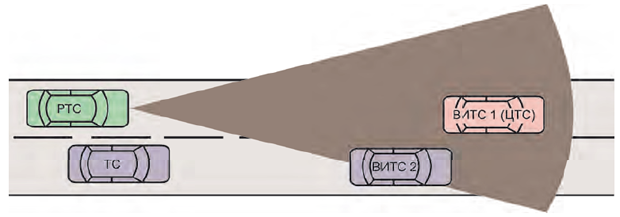
Рисунок 5 - Определение целевого транспортного средства
6.2.3.2 Определение расстояния на прямолинейных участках дорог
Если ЦТС находится на расстоянии, находящемся в диапазоне от ![]() до
до ![]() , то САКК должна измерять расстояние до ЦТС (см. рисунок 4). В пределах данного диапазона ЦТС должно быть обнаружено как минимум в пределах области, равной ширине РТС.
, то САКК должна измерять расстояние до ЦТС (см. рисунок 4). В пределах данного диапазона ЦТС должно быть обнаружено как минимум в пределах области, равной ширине РТС.
Максимальное значение дистанции, определяемой на прямолинейных участках дорог, ![]() , м, вычисляют по формуле
, м, вычисляют по формуле
![]() , (1)
, (1)
где ![]() - максимально возможная в установившемся режиме
- максимально возможная в установившемся режиме ![]() дистанция при выбранной скорости
дистанция при выбранной скорости ![]() ;
;
![]() - максимальная выбранная скорость движения РТС.
- максимальная выбранная скорость движения РТС.
Если ЦТС находится на расстоянии в диапазоне от ![]() до
до ![]() при
при ![]() =4 м, САКК должна обнаружить наличие ТС. Измерение расстояния до ТС или относительной скорости ТС и РТС не требуется.
=4 м, САКК должна обнаружить наличие ТС. Измерение расстояния до ТС или относительной скорости ТС и РТС не требуется.
Если ЦТС находится на расстоянии, меньшем ![]() при
при ![]() =2 м, от САКК не требуется обнаруживать наличие этого ТС.
=2 м, от САКК не требуется обнаруживать наличие этого ТС.
6.2.3.3 Определение ЦТС
Если на прямолинейном участке дороги и на участке с постоянной кривизной впереди РТС движутся несколько ВИТС (см. рисунок 5), то для типичных ситуаций управления САКК должно быть выбрано ЦТС, находящееся на полосе движения РТС, как представлено в сценарии испытания (см. 10.5).
6.2.3.4 Способность работы на непрямолинейных участках дорог
САКК должна позволить РТС, движущемуся в стационарном режиме, следовать с ![]() дистанцией
дистанцией ![]() по прямым дорогам и поворотам со значениями радиусов, указанных в таблице 2, в зависимости от класса эксплуатации САКК. САКК должна позволить РТС следовать за ЦТС с установившейся
по прямым дорогам и поворотам со значениями радиусов, указанных в таблице 2, в зависимости от класса эксплуатации САКК. САКК должна позволить РТС следовать за ЦТС с установившейся ![]() дистанцией
дистанцией ![]() , если ЦТС движется по постоянному радиусу кривой
, если ЦТС движется по постоянному радиусу кривой ![]() с постоянной скоростью
с постоянной скоростью ![]() , м/с, установившейся при движении на непрямолинейном участке в стационарном режиме, вычисляемой по формуле
, м/с, установившейся при движении на непрямолинейном участке в стационарном режиме, вычисляемой по формуле
![]() , (2)
, (2)
где ![]() - расчетное поперечное ускорение на непрямолинейных участках автомагистралей;
- расчетное поперечное ускорение на непрямолинейных участках автомагистралей;
![]() - минимальный радиус кривизны непрямолинейного участка дороги.
- минимальный радиус кривизны непрямолинейного участка дороги.
Значение ![]() получено на основе изучения статистических данных о движении на поворотах и является средним арифметическим для 95% водителей (cм. рисунок 6).
получено на основе изучения статистических данных о движении на поворотах и является средним арифметическим для 95% водителей (cм. рисунок 6).
Для использования в вычислениях по ГОСТ Р ИСО 15623 принимают:
- для класса эксплуатации I: ![]() =2,0 м/с
=2,0 м/с,
![]() =31,6 м/с (114 км/ч);
=31,6 м/с (114 км/ч);
- для классов эксплуатации II-IV: ![]() =2,3 м/с
=2,3 м/с.
Таблица 2 - Классификация систем адаптивного круиз-контроля в зависимости от минимального радиуса кривизны дороги
Класс эксплуатации | Минимальный радиус кривизны дороги в плане |
I | 500 |
II | 250 |
III | 125 |
IV | 0 |
Системы классов I, II, III, IV должны иметь способность обнаруживать ЦТС и ВИТС на траектории движения РТС на участках дороги с радиусом кривизны не менее 500; 250; 125; 0 м соответственно.
6.2.4 Переход "Начало движения"
Переход из состояния удержания к состоянию следования или к состоянию контроля скорости может быть осуществлен водителем или автоматически САКК.
|
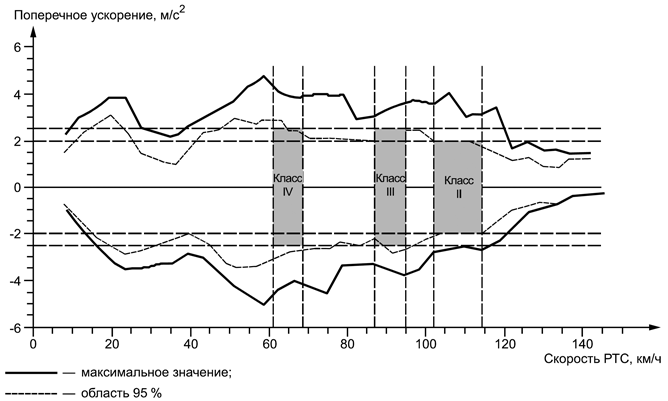
Рисунок 6 - Поперечное ускорение для среднестатистического водителя
6.3 Основной интерфейс водителя и возможности вмешательства
6.3.1 Элементы операций и реакции системы
6.3.1.1 САКК должны обеспечить водителю средства для выбора желаемой скорости движения. Опционально средства контроля скорости могут быть предложены водителю бортовыми системами, например системой распознавания дорожных знаков.
6.3.1.2 В состоянии контроля скорости и в активном состоянии следования торможение, примененное водителем, должно деактивировать работу САКК. Для САКК ПДС: в состоянии удержания торможение водителем не обязательно должно приводить к деактивации САКК (переводу САКК в состояние ожидания, см. рисунок 3).
6.3.1.3 САКК не должна значительно и кратковременно снижать тормозные характеристики при начале торможения водителем в соответствии с [2], даже когда САКК тормозила автоматически.
6.3.1.4 При воздействии водителя РТС на педаль управления двигателем CАКК должна деактивироваться.
6.3.1.5 Автоматическая активация тормозной системы не должна приводить к блокировке колес на периоды времени, превышающие периоды, допустимые АБС. Эта функция должна быть реализована независимо от наличия АБС на РТС.
6.3.1.6 Автоматическое увеличение мощности, инициированное САКК, не должно приводить к чрезмерному проскальзыванию колес в течение периодов времени, превышающих периоды, допустимые ПБС. Эта функция должна быть реализована независимо от наличия ПБС на РТС.
6.3.1.7 САКК могут автоматически регулировать ![]() дистанцию без вмешательства водителя для того, чтобы реагировать на условия вождения, формируемые окружающей средой (например, плохие погодные условия). Тем не менее скорректированная
дистанцию без вмешательства водителя для того, чтобы реагировать на условия вождения, формируемые окружающей средой (например, плохие погодные условия). Тем не менее скорректированная ![]() дистанция не должна быть меньше минимальной
дистанция не должна быть меньше минимальной ![]() дистанции, выбранной водителем.
дистанции, выбранной водителем.
6.3.1.8 Если САКК позволяет водителю выбрать желаемую ![]() дистанцию, то метод выбора должен соответствовать одному из следующих:
дистанцию, то метод выбора должен соответствовать одному из следующих:
а) если САКК сохраняет последнюю выбранную ![]() дистанцию после того, как она перешла в состояние "выключено" (см. рисунок 3), то
дистанцию после того, как она перешла в состояние "выключено" (см. рисунок 3), то ![]() дистанция должна быть четко показана водителю по меньшей мере после активации САКК;
дистанция должна быть четко показана водителю по меньшей мере после активации САКК;
б) если САКК не сохраняет последнюю выбранную ![]() дистанцию после того, как она перешла в состояние "выключено" (см. рисунок 3), то значение
дистанцию после того, как она перешла в состояние "выключено" (см. рисунок 3), то значение ![]() дистанции, установленное по умолчанию, должно составлять не менее 1,5 с.
дистанции, установленное по умолчанию, должно составлять не менее 1,5 с.
6.3.1.9 Если РТС, помимо САКК, оснащено обычным круиз-контролем, то не должно быть автоматического переключения между САКК и обычным круиз-контролем.
6.3.1.10 САКК ОДС 1 должна либо временно приостановить работу, но оставаться в активном состоянии, либо переключиться в состояние ожидания, если водитель нажимает педаль сцепления. Автоматическое торможение может быть продолжено при нажатой педали сцепления. После того как САКК отпустит тормоза, САКК может возобновить управление РТС либо перейти в режим ожидания в ответ на нажатие водителем педали сцепления.
6.3.2 Элементы отображения
Минимальная информация обратной связи для водителя должна содержать: состояние САКК (активное или неактивное), скорость, установленную водителем, дистанцию до ЦТС, установленную водителем, сообщение об обнаружении ЦТС.
Если САКК недоступна по причине сбоя или неисправности, водитель должен быть проинформирован об этом. Если для уведомления водителя используются символы, необходимо применять стандартные символы в соответствии с ГОСТ Р 58497.
Если САКК деактивирована автоматически, то водитель должен быть проинформирован об этом. Если для уведомления водителя используются символы, необходимо применять стандартные символы в соответствии с ГОСТ Р 58497.
Если РТС оборудовано как САКК, так и обычной системой круиз-контроля, то водитель РТС должен быть проинформирован о том, какая система работает в текущий момент.
Сигнал "Обнаружено ТС", сообщающий водителю о том, что САКК в активном состоянии обнаружила ВИТС, рекомендуется активировать только при первоначальной настройке или диагностике САКК.
6.3.3 Символы
Если для идентификации функций САКК, ее отказов или неисправностей используются символы, то следует использовать стандартные символы в соответствии с ГОСТ Р 58497.
6.4 Эксплуатационные ограничения
Для повышения комфорта при скорости РТС ниже 5 м/с не должно происходить внезапного снижения тормозного усилия из-за исчезновения ЦТС или автоматической деактивации из-за сбоя системы, отличного от отказов тормозной системы.
Автоматическое положительное ускорение с помощью САКК возможно при скорости РТС не меньше чем 5 м/с.
Минимальная заданная скорость должна составлять:
![]() 4,4 м/с.
4,4 м/с.
Среднее автоматическое замедление, обеспечиваемое САКК, не должно превышать 3,5 м/с (в среднем за 2 с) при движении РТС со скоростью свыше 20 м/с и 5 м/с
(в среднем за 2 с), когда РТС движется со скоростью, меньшей 5 м/с, как показано на рисунке 7.
|

Рисунок 7 - Максимальное замедление
Средняя скорость изменения автоматического замедления (отрицательный рывок) не должна превышать 2,5 м/с (в среднем за 1 с) при движении РТС со скоростью свыше 20 м/с и 5 м/с
(в среднем за 1 с) при движении РТС со скоростью, меньшей 5 м/с, как показано на рисунке 8.
|
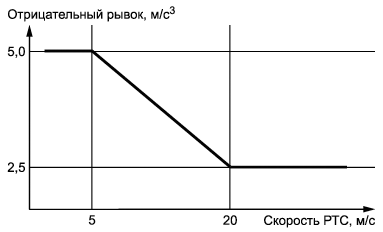
Рисунок 8 - Максимальный отрицательный рывок
Среднее автоматическое ускорение, обеспечиваемое САКК, не должно превышать 2 м/с (в среднем за 2 с) при движении РТС со скоростью свыше 20 м/с и 4 м/с
(в среднем за 2 с) при движении РТС со скоростью, меньшей 5 м/с, как показано на рисунке 9.
|

Рисунок 9 - Максимальное ускорение
Если ЦТС приближается к ![]() и больше не определяется, то САКК должна инициировать стратегию контроллера, начиная с последней действующей команды торможения, до тех пор, пока РТС не будет остановлено, или САКК не обнаружит ЦТС впереди на протяжении
и больше не определяется, то САКК должна инициировать стратегию контроллера, начиная с последней действующей команды торможения, до тех пор, пока РТС не будет остановлено, или САКК не обнаружит ЦТС впереди на протяжении ![]() , или пока водитель не отменит действие САКК через педаль управления двигателем. Если ВИТС обнаружено в диапазоне расстояний от
, или пока водитель не отменит действие САКК через педаль управления двигателем. Если ВИТС обнаружено в диапазоне расстояний от ![]() до
до ![]() , а дистанция не может быть определена, САКК должна запретить автоматическое ускорение.
, а дистанция не может быть определена, САКК должна запретить автоматическое ускорение.
6.5 Включение сигналов торможения
При применении автоматического торможения должны включаться сигналы торможения. Когда САКК применяет другие устройства торможения, система может включать сигналы торможения. Применяются требования, установленные к автоматической генерации сигналов торможения в [2] или [3] в зависимости от категории РТС.
6.6 Реакция на отказы
Необходимые реакции на отказы в зависимости от того, в какой подсистеме обнаружен отказ (см. рисунок 10), показаны в таблице 3.
|

Рисунок 10 - Приводы для осуществления управления продольным движением рассматриваемого транспортного средства
Таблица 3 - Реакция системы адаптивного круиз-контроля на отказы
Отказ в подсистеме | Действие при отказе, выявленном во время применения САКК | |
управления тормозной системой | управления двигателем | |
Отказ двигателя | Следует поддерживать торможение по мере необходимости, по меньшей мере для фактического/текущего маневра торможения | Следует отказаться от режима управления двигателем в САКК |
Отказ тормозной системы* | Следует отказаться от режима управления в САКК. | Следует отказаться от режима управления двигателем в САКК |
Отказ датчиков распознавания и оценки расстояния | Следует инициировать стратегию контроллера, начиная с последней действительной команды торможения. Торможение в этом случае не следует применять резко. САКК следует отключить немедленно после воздействия водителя на педали тормоза, управления двигателем или выключателя САКК | Следует отказаться от режима управления двигателем в САКК |
Отказ контроллера САКК | Следует отказаться от режима управления в САКК | Следует отказаться от режима управления в САКК |
* При возникновении неисправности в контроллере передач тормоз будет в состоянии справиться с функцией торможения. | ||
Отказы, перечисленные в таблице 3, должны приводить к немедленному уведомлению водителя (за исключением отказа коробки передач с САКК ОДС 1). Уведомление должно оставаться активным до выключения САКК.
Повторная активация САКК должна быть запрещена до тех пор, пока не будет выполнена успешная самодиагностика, инициированная выключением/включением зажигания либо выключением/включением САКК.
7 Условия эксплуатации систем адаптивного круиз-контроля
7.1 САКК, установленная на ТС, должна обеспечивать заданные показатели технических и эксплуатационных характеристик круглосуточно, ежедневно, в любое время года при использовании в следующих условиях:
а) при воздействии климатических факторов внешней среды, соответствующих климатическому исполнению РТС по ГОСТ 15150;
б) на дорогах, соответствующих СП 34.13330 в части дорог равнинной местности;
в) в песчано-пустынной местности при массовой концентрации пыли до 5 мг/м;
г) при атмосферных осадках: снег, дождь, ледяной дождь, туман, не ограничивающих условия фронтальной видимости;
д) при сухом обтекателе радарных датчиков, лишенном загрязнений;
е) при условиях фронтальной видимости не менее 200 м;
ж) диапазон эксплуатационных скоростей САКК должен быть согласован производителем САКК с автопроизводителем РТС.
Допускается снижение дальности обнаружения при несоблюдении условий, указанных в перечислениях в), г) и е).
7.2 Требования к механическим нагрузкам, колебаниям в вертикальной плоскости, амплитуда (только при применении в САКК радаров):
- не более 0,1 м в полосе частот от 0,1 до 50,0 Гц;
- не более 1/4 длины волны (не более 3 мм для частоты 24 ГГц, не более 1 мм для 77 ГГц) в диапазоне частот более 50 Гц.
Примечания
1 При наличии датчика ускорений возможна компенсация колебаний или формирование предупреждения о необходимости снизить скорость.
2 При превышении указанных значений механических нагрузок допускается ограничение функциональности САКК при эксплуатации.
7.3 Контрастность изображений, предоставляемых видеокамерой, должна быть не менее 500:1 (только при применении в САКК видеокамер).
7.4 В ночное время окружающие объекты должны быть освещены ближним светом фар РТС (только при применении в САКК видеокамер).
8 Аппаратные интерфейсы системы
8.1 Требования к интеграции в ТС
8.1.1 САКК должна осуществлять обмен информацией с другими устройствами и системами, подключенными к шине передачи данных РТС в соответствии с требованиями автопроизводителя РТС.
8.1.2 Передача видеоинформации между компонентами системы, а также между САКК и РТС должна осуществляться по интерфейсу, согласованному с автопроизводителем РТС.
8.2 Для корректной работы системы требуется наличие электронных блоков и подсистем:
- мультимедийная система ТС с дисплеем или комбинация приборов с возможностью отображения сообщений и предупреждений САКК;
- блок управления кузовной электроникой;
- оборудование для получения видеопотока.
9 Общие требования к характеристикам систем
9.1 Время готовности функций системы с момента подачи питания должно составлять не более 20 с.
9.2 САКК должна работать во всех погодных условиях.
9.3 САКК должна включать в себя средства самодиагностики и сообщать водителю о своих сбоях и неисправностях.
9.4 Компоненты САКК должны соответствовать степеням защиты по ГОСТ 14254 в зависимости от места их установки в РТС.
9.5 Конструкция кабельных соединений САКК не должна допускать их неправильной стыковки или самопроизвольного разъединения.
9.6 Конструкция и компоновка компонентов САКК должны обеспечивать безопасность при монтаже, эксплуатации и замене.
9.7 Должно быть исключено самопроизвольное отключение САКК или ее компонентов при работе в условиях промышленных и атмосферных радиопомех.
9.8 САКК должна быть работоспособна согласно ГОСТ 15150 в соответствии с климатическим исполнением РТС, на которое она установлена.
9.9 САКК должна удовлетворять требованиям по устойчивости к кондуктивным помехам по цепям питания и управления в соответствии с ГОСТ 33991.
9.10 САКК должна удовлетворять нормам 3-го класса по уровню излучаемых радиопомех в цепях питания в соответствии с ГОСТ Р 51318.25.
9.11 САКК должна удовлетворять требованиям по устойчивости к электростатическому разряду в соответствии с ГОСТ Р 50607.
9.12 САКК должна удовлетворять требованиям по уровню излучаемых индустриальных радиопомех в соответствии с [4].
9.13 Сопротивление изоляции САКК, измеренное в нормальных климатических условиях между всеми контактами разъема и корпусом изделия, должно быть не менее 10 МОм.
9.14 Изоляция САКК должна выдерживать без повреждений в течение одной минуты воздействия синусоидального переменного тока частотой 50 Гц с действующим значением испытательного напряжения 550 В.
9.15 САКК должна удовлетворять требованиям по устойчивости к внешнему электромагнитному полю в соответствии с [4].
9.16 САКК должна удовлетворять требованиям 3-й степени эмиссии импульсных помех в цепи питания в соответствии с ГОСТ 33991.
9.17 САКК должна удовлетворять требованиям по устойчивости к динамическим изменениям напряжения питания:
- при повышении напряжения питания до (18±0,2) В в течение 2 ч соответствовать функциональному классу А-С;
________________
Функциональный класс в соответствии с ГОСТ 33991.
- при повышении напряжения питания до (24±0,2) В в течение 5 мин соответствовать функциональному классу А-С;
- при воздействии напряжения обратной полярности (минус 14±0,2) В в течение (5±0,2) мин соответствовать функциональному классу А;
- после плавного снижения напряжения питания с 16 до 0 В и последующего повышения от 0 до 16 В со скоростью изменения напряжения (0,5±0,1) В/мин соответствовать функциональному классу А.
10 Методы испытаний для оценки эксплуатационных характеристик
10.1 Условия окружающей среды
Должны соблюдаться следующие условия окружающей среды:
а) местом проведения испытаний должен быть ровный и сухой участок дорожного полотна с асфальтовой или бетонной поверхностью;
б) температура воздуха должна находиться в пределах от минус 20°C до плюс 40°C;
в) видимость в горизонтальном направлении должна превышать 1 км.
10.2 Спецификация мишеней для испытаний
10.2.1 Общие положения
Приведенные в 10.2 мишени для испытаний соответствуют технологическому уровню, достигнутому на дату выпуска настоящего стандарта. При использовании других технологий допускается использование соответствующих им мишеней.
10.2.2 Лидар инфракрасного диапазона
________________
Мишени для испытаний характеризуются КИМ:
- мишень А соответствует как минимум 95% всех моторизованных ТС;
- мишень Б соответствует загрязненному ТС без светоотражающих элементов.
Мишени для испытаний различаются значениями КИМ и площадью поперечного сечения. Минимальная площадь поперечного сечения мишеней для испытаний A и Б равна 20 cм.
Мишень для испытаний A: диффузный отражатель с КИМ=(2,0±10)% (см. приложение A).
Мишень для испытаний Б: диффузный отражатель с КИМ=(1,0±10)%.
10.2.3 Радар миллиметрового диапазона![]()
________________
![]() Мишени для испытаний характеризуются ЭПО:
Мишени для испытаний характеризуются ЭПО:
- мишень А с применяемыми частотами 60, 77, 90 ГГц соответствует как минимум 95% всех моторизованных ТС;
- мишень Б соответствует мотоциклу.
Радиолокационная цель испытания определяется эффективной площадью отражения (ЭПО).
Для диапазона частот от 20 до 95 ГГц:
- мишень для испытаний A: ЭПО должна составлять 10 м;
- мишень для испытаний Б: ЭПО должна составлять 3 м.
Для значительно отличающихся частотных диапазонов ЭПО должна быть определена (см. приложение A).
10.3 Испытания способности автоматической остановки для системы адаптивного круиз-контроля в полном диапазоне скоростей
Испытания способности автоматической остановки должны подтвердить эффективную работу САКК ПДС в диапазоне низких скоростей вплоть до остановки.
10.3.1 Испытательное целевое транспортное средство
ЦТС должно быть оснащено мишенью испытаний A, определенной в 10.2. Мишень испытаний должна быть расположена на задней части ЦТС. Оставшаяся открытая поверхность ЦТС должна быть скрыта таким образом, чтобы задняя поверхность со снятой испытательной мишенью имела ЭПО не более 2 м или отражательную способность не более 20% от мишени испытаний.
10.3.2 Начальные условия
ЦТС должно двигаться со скоростью ![]() .
.
Ширина ЦТС должна находиться в диапазоне от 1,4 до 2,0 м.
РТС движется за ЦТС в стационарном режиме следования.
Желаемая ![]() дистанция должна составлять
дистанция должна составлять ![]() на всем протяжении испытаний.
на всем протяжении испытаний.
Боковое смещение центральной продольной оси РТС относительно центральной продольной оси ЦТС должно быть менее 0,5 м в соответствии с рисунком 11.
|
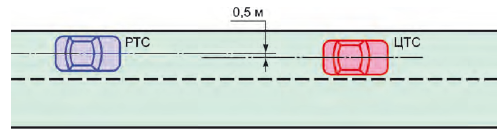
Рисунок 11 - Испытания способности автоматической остановки - начальные условия
10.3.3 Процедура испытаний
ЦТС должно затормозить до полной остановки с ускорением в диапазоне от 2,0 до минус 2,5 м/с.
Испытание считается завершенным успешно, если РТС остановлено системой АКК позади ЦТС.
10.4 Испытания на дальность обнаружения цели
Испытания на дальность обнаружения цели проводят с учетом 6.2.3.2.
Процедура испытаний для ![]() ,
, ![]() ,
, ![]() и
и ![]() показана на рисунке 12.
показана на рисунке 12.
|

1 - эталонная плоскость РТС
Рисунок 12 - Зона распознавания в продольном направлении
Эталонной плоскости РТС соответствует прямоугольник, равный по ширине РТС, высотой 0,9 м, начинающийся на высоте 0,2 м. В качестве зоны обнаружения рассматривают зоны с различными расстояниями между передней и задней поверхностями. Они также ограничены минимальной высотой легковых автомобилей. Эталонные плоскости ![]() ,
, ![]() ,
, ![]() разделены на три части. Каждая из частей L и R имеет ширину 0,5 м. При испытаниях выбранный отражатель должен быть обнаружен по меньшей мере на одной позиции в пределах каждой из частей (L, C, R) эталонной плоскости РТС в положениях
разделены на три части. Каждая из частей L и R имеет ширину 0,5 м. При испытаниях выбранный отражатель должен быть обнаружен по меньшей мере на одной позиции в пределах каждой из частей (L, C, R) эталонной плоскости РТС в положениях ![]() ,
, ![]() ,
, ![]() . В положении
. В положении ![]() отражатель должен быть обнаружен только в одной позиции в пределах всей эталонной плоскости (см. рисунок 12).
отражатель должен быть обнаружен только в одной позиции в пределах всей эталонной плоскости (см. рисунок 12).
Для положения ![]() следует использовать мишень для испытаний А.
следует использовать мишень для испытаний А.
Для положений ![]() ,
, ![]() и
и ![]() следует использовать мишень для испытаний Б.
следует использовать мишень для испытаний Б.
Положение ![]() соответствует фиксированной точке измерения с расстоянием 75 м перед РТС.
соответствует фиксированной точке измерения с расстоянием 75 м перед РТС.
Испытания по оценке дистанции следует проводить при движении РТС и мишени. В качестве опции допускаются испытания при стационарном режиме РТС и мишени для испытаний.
Максимальное время распознавания мишени не должно превышать 2 с после ее появления.
10.5 Испытания на различение целевого транспортного средства
10.5.1 Общие положения
Испытание на различение ЦТС проводят с учетом 6.2.3.3.
10.5.2 Начальные условия
Два ВИТС одной и той же модели движутся параллельно друг другу со скоростью ![]() . Расстояние между центральными продольными осями ВИТС составляет (3,5±0,25) м. Ширина каждого из ВИТС должна составлять от 1,4 до 2,0 м.
. Расстояние между центральными продольными осями ВИТС составляет (3,5±0,25) м. Ширина каждого из ВИТС должна составлять от 1,4 до 2,0 м.
РТС движется позади одного из ВИТС в стационарном режиме в состоянии следования. ВИТС, за которым следует РТС, обозначено как ЦТС. ![]() дистанция равна
дистанция равна ![]() и установленная скорость превышает
и установленная скорость превышает ![]() . Боковое смещение центральной продольной оси РТС относительно центральной продольной оси ЦТС должно составлять менее 0,5 м (см. рисунок 13). При этом принимают:
. Боковое смещение центральной продольной оси РТС относительно центральной продольной оси ЦТС должно составлять менее 0,5 м (см. рисунок 13). При этом принимают:
![]() =27 м/с (~100 км/ч).
=27 м/с (~100 км/ч).
Примечание - Если РТС не способно развивать эту скорость, то следует использовать ![]() =22 м/с (~80 км/ч).
=22 м/с (~80 км/ч).
![]() .
.
|

Рисунок 13 - Испытание на обнаружение целевого транспортного средства - начальные условия
10.5.3 Процедура испытаний
ЦТС ускоряется до ![]() . Испытание считается завершенным успешно, если РТС проезжает впереди в соседнем с ВИТС ряду под управлением САКК (см. рисунок 14).
. Испытание считается завершенным успешно, если РТС проезжает впереди в соседнем с ВИТС ряду под управлением САКК (см. рисунок 14).
|

Рисунок 14 - Испытание на обнаружение целевого транспортного средства - конечные условия
10.6 Испытания для оценки возможностей на непрямолинейных участках
10.6.1 Общие положения
Испытания для оценки возможностей на непрямолинейных участках проводят с учетом 6.2.3.4.
Данные испытания должны принимать во внимание прогнозирование геометрии дороги в сочетании с полем зрения датчика САКК.
Различные методы прогнозирования геометрии дороги и определения скорости движения вызывают необходимость составления сценария вождения.
10.6.2 Испытательный участок
Испытательный участок должен состоять из круговой дорожки постоянного радиуса или достаточно длинного участка кривой постоянного радиуса. Радиус должен находиться в пределах от 80% до 100% от ![]() в соответствии с таблицей 2 в зависимости от класса эксплуатации САКК. Движение по участку должно осуществляться как по часовой стрелке, так и против часовой стрелки. Ограничения в отношении маркировки полос и ограждений отсутствуют (см. рисунок 15).
в соответствии с таблицей 2 в зависимости от класса эксплуатации САКК. Движение по участку должно осуществляться как по часовой стрелке, так и против часовой стрелки. Ограничения в отношении маркировки полос и ограждений отсутствуют (см. рисунок 15).
|
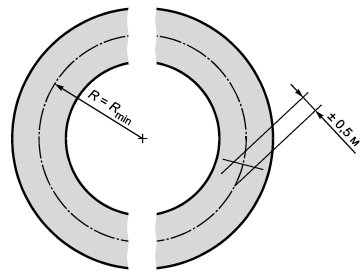
Рисунок 15 - Схема испытательного участка (по ГОСТ Р ИСО 22178)
10.6.3 Возможности на непрямолинейных участках дорог, целевое транспортное средство
ЦТС должно быть оснащено мишенью для испытаний A, как это определено в 10.2. Мишень для испытаний должна быть размещена посередине задней поверхности ЦТС на высоте (0,6±0,1) м над опорной поверхностью.
Оставшаяся открытая поверхность ЦТС должна быть скрыта таким образом, чтобы задняя поверхность со снятой испытательной мишенью представляла собой ЭПО площадью не более 2 м или отражательной способностью не более 20% от мишени для испытаний.
10.6.4 Сценарий вождения
РТС следует за ЦТС по траектории ЦТС (боковое расстояние ±0,5 м, измеренное от осевых линий обоих ТС) в следующем режиме. Два данных ТС располагаются в соответствии с начальными условиями испытания, определенными на рисунке 16 (только для РТС и ЦТС), до начала испытания. Условия испытаний показаны в таблице 4 и на рисунке 16.
Скорость ЦТС в начале испытания, м/с, вычисляют по формуле
![]() , (3)
, (3)
где ![]() =2,0 м/с
=2,0 м/с для класса эксплуатации I (по ГОСТ Р ИСО 15623);
![]() =2,3 м/с
=2,3 м/с для классов эксплуатации II-IV;
R - радиус непрямолинейного участка дороги.
После замедления ЦТС оценивают реакцию РТС. РТС должно начать замедляться из-за уменьшения расстояния до ЦТС прежде, чем ![]() дистанция станет ниже 2/3
дистанция станет ниже 2/3 ![]() .
.
Таблица 4 - Условия испытаний на непрямолинейных участках
Наименование показателя | Подготовительные мероприятия | Начальные условия | Первый маневр испытаний | Второй маневр испытаний |
ЦТС | ||||
Скорость |
| Снижение скорости до (3,5±0,5) м/с |
| |
Время, с | Не менее 10 | Триггер времени 0 | 2 | |
Радиус |
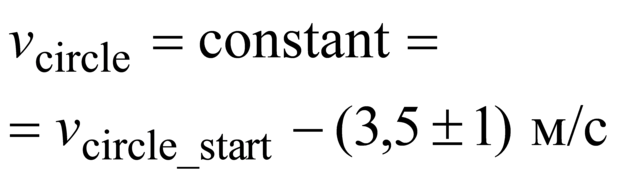
| R=constant (см. 10.5.1) | ||
РТС | ||||
Скорость | Поддерживается САКК | |||
Ускорение, м/с |
| Необходимо зафиксировать замедление | ||
Радиус |
| R=constant (см. 10.5.1) | ||
|
| Устанавливается САКК, подлежит наблюдению | ||
|

Рисунок 16 - Пример схемы испытательного участка (по ГОСТ Р ИСО 22178)
Приложение А
(обязательное)
Техническая информация
А.1 Лидар, коэффициент испытательной мишени
А.1.1 Телесный угол ![]()
Телесный угол ![]() , ср (см. рисунок А.1), вычисляют по формуле
, ср (см. рисунок А.1), вычисляют по формуле
![]() , (А.1)
, (А.1)
где ![]() - площадь облученной поверхности, м
- площадь облученной поверхности, м;
![]() - расстояние между источником излучения и площадью проекции облученной поверхности А, м;
- расстояние между источником излучения и площадью проекции облученной поверхности А, м;
![]() - телесный угол источника излучения, ср.
- телесный угол источника излучения, ср.
|

Рисунок А.1 - Телесный угол
А.1.2 Излученная интенсивность ![]()
Интенсивность, излученную в данном направлении от отражателя, измеренную перед принимающей поверхностью, ![]() , Вт/ср, вычисляют как мощность, излученную источником
, Вт/ср, вычисляют как мощность, излученную источником ![]() в пределах телесного угла
в пределах телесного угла ![]() по формуле
по формуле
![]() , (А.2)
, (А.2)
где ![]() - мощность излучения, Вт;
- мощность излучения, Вт;
![]() - облученный телесный угол, ср.
- облученный телесный угол, ср.
А.1.3 Интенсивность излучения ![]()
Интенсивность излучения ![]() , Вт/м
, Вт/м, представляющую собой плотность излучения на облучаемой площади, вычисляют по формуле
![]() , (А.3)
, (А.3)
где ![]() - падающая излученная мощность, Вт;
- падающая излученная мощность, Вт;
![]() - площадь облучаемой поверхности, м
- площадь облучаемой поверхности, м.
А.1.4 Коэффициент испытательной мишени
Испытательная мишень характеризуется коэффициентом испытательной мишени, имитирующим отражательную способность загрязненного ТС без светоотражающих элементов.
Коэффициент испытательной мишени (для инфракрасных отражателей) КИМ вычисляют по формуле
![]() , (А.4)
, (А.4)
где ![]() - интенсивность, излученная в данном направлении от отражателя, измеренная перед принимающей поверхностью, Вт/ср;
- интенсивность, излученная в данном направлении от отражателя, измеренная перед принимающей поверхностью, Вт/ср;
![]() - интенсивность излучения на выходе излучателя, Вт/м
- интенсивность излучения на выходе излучателя, Вт/м.
Отражатель (см. рисунок А.2) с заданным значением КИМ должен иметь пространственное распределение отражения не менее 8·10 ср.
|

Рисунок А.2 - Сценарий приема
|
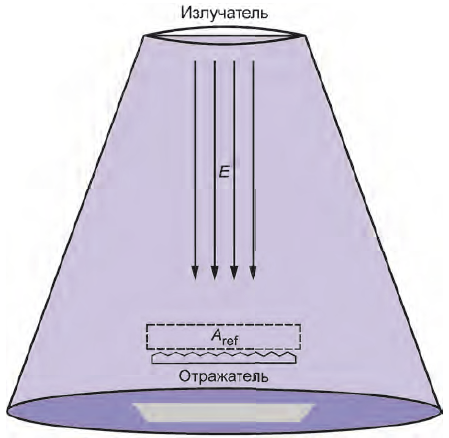
Рисунок А.3 - Сценарий передачи
|

Рисунок А.4 - Сценарий отражения
КИМ характеризует только качество отражателя (затухание). Для процедуры испытания используют уголковый отражатель (см. рисунок А.3) (сокращение поверхности до "точки"). Тем не менее можно использовать ![]() поверхность отражения, если полная отражательная способность поверхности отражателя не превышает вышеупомянутого значения. большую
поверхность отражения, если полная отражательная способность поверхности отражателя не превышает вышеупомянутого значения. большую
А.1.5 Размер отражателя
Размер отражателя определяют согласно рисунку А.4.
Опытным путем установлено, что лучшим решением для имитации ТС является отражатель Ламберта площадью приблизительно 1,7 м. В качестве альтернативы можно воспользоваться "тройным" отражателем площадью приблизительно 20 см
.
Отражатель Ламберта отражает полную энергию внутри сферической области (см. рисунок А.5).
Излученную мощность ![]() , Вт, вычисляют по формуле
, Вт, вычисляют по формуле
![]() , (A.5)
, (A.5)
где ![]() - излученная интенсивность, Вт/ср;
- излученная интенсивность, Вт/ср;
![]() - телесный угол, ср.
- телесный угол, ср.
Размер 1,7 м соответствует поперечному сечению небольшого автомобиля.
|

Рисунок А.5 - Отражатель Ламберта
А.2 Определение эффективной площади отражения испытательной мишени с уголковым отражателем кубического типа
Испытательная мишень характеризуется размером поперечного сечения (эффективной площади отражения). Для частот, известных в настоящее время (24, 60, 77, 90 ГГц), 10 м представляют по меньшей мере 95% всех ТС, передвигающихся по автомобильным дорогам. Для существенно различающихся частотных диапазонов должны быть проведены исследования. Внешний вид испытательной мишени должен соответствовать рисунку А.6.
|
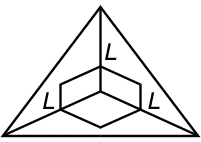
Рисунок А.6 - Уголковый отражатель кубического типа
Эффективную площадь отражения (радиолокационных волн) ЭПО, м, вычисляют по формуле
 , (А.6)
, (А.6)
где - длина волны, м;
L - длина стороны уголкового отражателя, м.
А.3 Способность следования
Значение дистанции ![]() =0,25 с основывается преимущественно на эмпирических, а не на технических данных. Предполагается, что при значениях менее 0,25 с водитель будет немедленно вмешиваться, и нет необходимости избегать ускорения, инициированного САКК (для сценария "подрезания" РТС с меньшей скоростью). Если
=0,25 с основывается преимущественно на эмпирических, а не на технических данных. Предполагается, что при значениях менее 0,25 с водитель будет немедленно вмешиваться, и нет необходимости избегать ускорения, инициированного САКК (для сценария "подрезания" РТС с меньшей скоростью). Если ![]() дистанция составляет или превышает 0,25 с, не гарантировано, что водитель вмешается. Поэтому САКК должна быть способна выявить и избежать ускорение.
дистанция составляет или превышает 0,25 с, не гарантировано, что водитель вмешается. Поэтому САКК должна быть способна выявить и избежать ускорение.
Приложение ДА
(справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Таблица ДА.1
Структура настоящего стандарта | Структура международного стандарта ISO 15622:2018 |
1 Область применения | 1 Область применения |
2 Нормативные ссылки | 2 Нормативные ссылки |
3 Термины и определения | 3 Термины и определения |
4 Обозначения и сокращения | 4 Обозначения и сокращения |
5 Классификация и функциональные элементы | 5 Классификация |
5.1 Типы систем адаптивного круиз-контроля | 5.1 Типы систем АКК |
5.2 Функциональные элементы систем адаптивного круиз-контроля* (-) | 6 Требования |
6 Требования | 7 Методы испытаний для оценки эксплуатационных характеристик |
7 Условия эксплуатации систем адаптивного круиз-контроля* (-) | Приложение А Техническая информация |
8 Аппаратные интерфейсы системы* (-) | Библиография |
9 Общие требования к характеристикам систем* (-) | |
10 Методы испытаний для оценки эксплуатационных характеристик (раздел 7) | |
Приложение А Техническая информация | |
Приложение ДА Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта | |
Библиография | |
* Включение в настоящий стандарт данных разделов (подразделов) обусловлено необходимостью приведения его в соответствие с требованиями ГОСТ 1.5. | |
Библиография
[1] | ECE/TRANS/WP.29/78/Rev.6 | Сводная резолюция о конструкции транспортных средств |
[2] | Правила ЕЭК ООН N 13-Н | Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения |
[3] | Правила ЕЭК ООН N 13 | Единообразные предписания, касающиеся официального утверждения транспортных средств категорий M, N и О в отношении торможения |
[4] | Правила ЕЭК ООН N 10 | Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении электромагнитной совместимости |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: автотранспортные средства, транспортное средство, автомобиль, электронная система, (адаптивный) круиз-контроль, помощь водителю, активная безопасность | |
Электронный текст документа
и сверен по:
, 2020
