ГОСТ Р 55691-2013/ISO/TS 15624:2001
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Системы управления и информации на транспорте
СИСТЕМЫ ОПОВЕЩЕНИЯ О ДОРОЖНЫХ ПРОИСШЕСТВИЯХ (TIWS)
Требования к системе
Transport information and control systems. Traffic Impediment Warning Systems (TIWS). System requirements
ОКС 33.040
Дата введения 2014-09-01
Предисловие
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении (ВНИИНМАШ) на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 418 "Дорожное хозяйство"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 декабря 2013 г. N 2223-ст
4 Настоящий стандарт идентичен международному документу ISO/TS 15624:2001* "Системы управления и информации на транспорте. Системы оповещения о дорожных происшествиях (TIWS). Требования к системе" (ISO/TS 15624:2001 "Transport information and control systems -Traffic Impediment Warning Systems (TIWS) - System requirements", IDT)
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Октябрь 2018 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
При возникновении аварийной ситуации на автомобильной дороге аварийное транспортное средство и возникший затор могут блокировать движение на полосах дорожного движения. Часто это приводит к ситуации, когда безопасность дорожного движения в зоне инцидента не может быть гарантирована. Обычно проходит более 10 мин после возникновения инцидента до того момента, когда информация об этом поступает с аварийных телефонов, установленных в придорожной полосе. При незначительных авариях водители часто уезжают с места происшествия, не сообщая об инциденте. Обнаружение инцидента, таким образом, затрудняется, и в некоторых случаях поврежденные дорожные сооружения, а также оставленные на проезжей части фрагменты пострадавших транспортных средств и их груза препятствуют нормальному движению.
Основная функция системы оповещения о дорожных происшествиях TIWS - обеспечить бесперебойное и безопасное продолжение движения в зоне инцидента - может быть достигнута быстрым выявлением факта инцидента, быстрой организацией действий по устранению последствий аварийной ситуации и удалению предметов, препятствующих продолжению движения, на самой ранней стадии, а также информированием водителей, находящихся на подъезде к месту инцидента.
Целью системы оповещения о дорожных происшествиях является частичная автоматизация сбора и передачи информации об инцидентах и заторах на дороге, а также снижение рабочей нагрузки на водителя посредством поддержки и оказания помощи водителю и дорожным службам в удобной для них форме.
Настоящий стандарт может быть использован как стандарт системного уровня для других стандартов, которые развивают тематику системы оповещения о дорожных происшествиях в направлении большей детализации, например в части концепции специальных сенсоров или в части большей детализации функций системы. Поэтому темы специальных требований к функциям и характеристикам сенсоров и коммуникативные связи для скоординированных решений не будут рассматриваться в настоящем стандарте.
1 Область применения
Настоящий стандарт устанавливает технические требования к системе оповещения о дорожных происшествиях (TIWS). Задача системы оповещения заключается в том, чтобы информация, собранная с помощью устройств инфраструктуры, автоматически и быстро доводилась до подъезжающих к месту инцидента или затора водителей, а также служб управления движением и экстренного реагирования на чрезвычайные ситуации (далее - служб экстренного реагирования), что позволяло бы оперативно устранять последствия инцидентов и избегать вторичных инцидентов и заторов. Конечная цель при этом - спасение пострадавших при инцидентах посредством ускорения прибытия помощи на место инцидента и быстрое устранение препятствий продолжению движения, а также минимизация потерь времени водителей, находящихся на подъезде к месту инцидента или затора, и предотвращение вторичных инцидентов и заторов.
Настоящий стандарт рассматривает в качестве ключевого элемента системы камеры кабельного телевидения (далее - камеры наблюдения), служащие датчиками, выявляющими заторы на дорогах и использующие функцию обработки визуальной информации и набор сообщений для коммуникации с водителями, участвующими в дорожном движении.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 система оповещения о дорожных происшествиях (Traffic Impediment Warning Systems; TIWS): Система, которая автоматически с помощью специальных сенсоров обнаруживает заторы на дороге, извещает о произошедшем инциденте службы управления движением и экстренного реагирования, а также водителей, находящихся на подъезде к месту инцидента, до момента, когда они смогут увидеть место происшествия.
Примечание - См. приложение А.
2.2 остановившееся транспортное средство (stopped vehicles): Транспортное средство, остановившееся на полосе дорожного движения или на обочине дороги.
2.3 медленно движущееся транспортное средство (slow moving vehicles): Транспортное средство, движущееся со скоростью не выше "А" в транспортном потоке.
Примечание - Величина скорости "А" определяется в зависимости от характера дороги и установленного ограничения скорости на конкретном участке дороги.
2.4 дистанция принятия решения (judgement distance): Расстояние, проходимое транспортным средством с момента получения водителем информации о заторе до момента, когда водитель решил, какое действие он предпримет.
Примечание - Под моментом получения водителем информации о заторе в настоящем стандарте подразумевается момент, когда соответствующая информация появляется на информационном табло в зоне видимости его водителем.
2.5 дистанция реакции водителя (reaction distance): Расстояние, проходимое транспортным средством с момента, когда водитель решил предпринять какое-то действие после получения уведомления о заторе на дороге, до принятия решения о торможении и приведения в действие тормозной системы.
2.6 тормозной путь (braking distance): Расстояние, проходимое транспортным средством с момента приведения в действие тормозной системы до момента остановки.
2.7 слепая зона камеры (camera blind spot range): Расстояние, от места расположения камеры наблюдения до начала зоны, в которой камера может обнаружить затор на дороге.
Примечание - В слепой зоне камера не может обнаружить возникновение затора.
2.8 предел видимости (out-of-sight range): Расстояние от точки, где расположено информационное табло, до точки, в которой информация на нем перестает читаться.
Примечание - При более близком расстоянии информация на табло не может быть прочитана из-за ограниченного угла обзора с места водителя.
2.9 средний интервал (average spacing): Среднее расстояние между передней габаритной точкой одного транспортного средства и передней габаритной точкой следующего за ним транспортного средства в непрерывном потоке движения.
Примечание - Параметр обратно пропорционален плотности потока движения.
2.10 оператор системы оповещения о дорожных происшествиях (оператор системы) (traffic sistem operator): Лицо, осуществляющее контроль режимов работы системы оповещения, считывание и обработку собираемой системой информации и ввод в систему вторичной информации о заторах и режимах движения, доводящейся до участников дорожного движения посредством информационных табло или иными способами, а также осуществляющее функции информирования и координации действий различных служб, обеспечивающих поддержание беспрепятственного движения по дорогам и ликвидацию последствий различных инцидентов на них, которое также может быть наделено функциями управления транспортными потоками в зоне покрытия системы.
2.11 датчики изображения (CCD sensor): Твердотельные датчики изображения, основанные на использовании многопиксельных ПЗС-матриц (приборов с зарядовой связью).
2.12 затор (traffic impediment): Скопление транспортных средств, вынужденных существенно снижать скорость движения вплоть до полного его прекращения в пределах одной или нескольких полос движения из-за каких-либо помех движению.
Примечание - Затор характеризуется наличием стоящих и (или) медленно движущихся транспортных средств, причина остановки (задержки движения) которых может являться неочевидной для водителей, подъезжающих к ним по тем же полосам движения. В этом случае водители вынуждены реагировать на сам факт неожиданного замедления скорости движения или остановки транспортных средств, двигающихся непосредственно перед ними. В случае если для предотвращения столкновения со стоящими или медленно двигающимися транспортными средствами водитель предпринимает смену полосы движения, водитель движущегося следом транспортного средства может оказаться не в состоянии предотвратить попутное столкновение при невозможности повторить маневр смены полосы движения.
2.13 пробка (traffic jam): Дорожная ситуация, характеризующаяся наличием скопления транспортных средств, полностью прекративших движение на всех полосах, по которым разрешено движение в данном направлении.
3 Основные нормативные положения
3.1 Общие требования
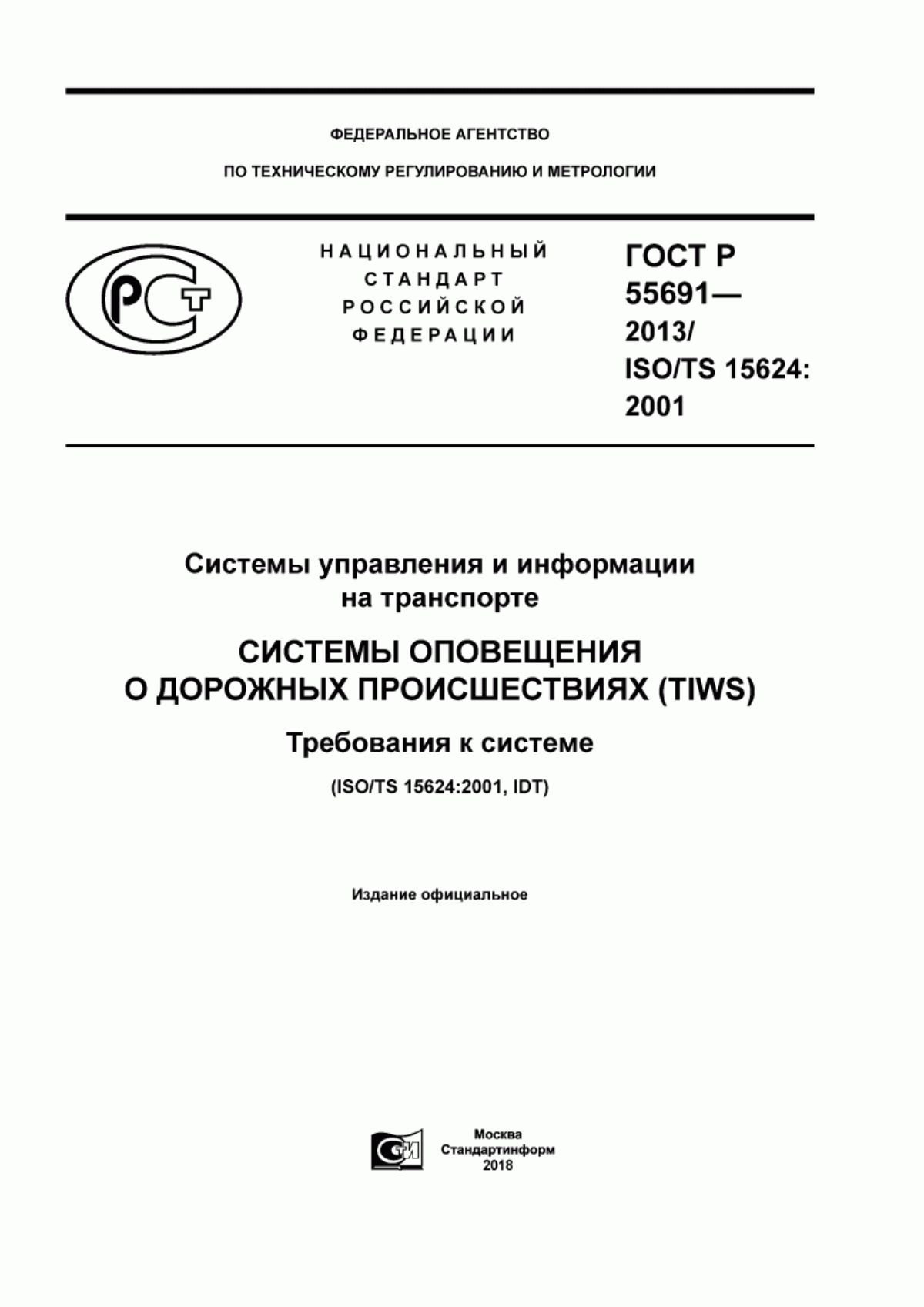
Конфигурация системы должна соответствовать изображенной на рисунке 1.
|
_______________
Подсистема сбора информации включает оборудование, обнаруживающее заторы на дорогах посредством датчиков, установленных над полосами движения или сбоку от дороги. Настоящий стандарт описывает главным образом обнаружение заторов на дорогах посредством обработки информации с камер наблюдения, используемых в качестве сенсоров для автоматического выявления заторов.
Подсистема обработки и принятия решения обрабатывает информацию, передаваемую камерой и/или группой камер и определяет факт возникновения дорожного затора.
Подсистема мониторинга, управления и регистрации уведомляет оператора системы с помощью тревожного сигнала или иным методом о возникшем заторе на дороге. Подсистема при помощи камер наблюдения позволяет оператору системы подтвердить как факт возникновения затора, так и его местоположение. В этом случае оператор системы может ввести изменения на информационные табло для водителей, зафиксировать информацию с помощью записывающего устройства или предпринять действия по аварийной программе.
Подсистема уведомления передает информацию о возникшем заторе на дороге водителям с помощью различных сигнальных сообщений или иными средствами. В некоторых случаях подсистема может принудительно перекрывать дороги или требовать от водителей выбора альтернативных маршрутов движения в объезд.
Рисунок 1 - Конфигурация системы
3.2 Классификация
В таблице 1 указана концептуальная основа системы. Таблица показывает, что быстрое обнаружение инцидента и оперативное распространение информации о заторе будет способствовать исключению вторичных инцидентов и защите водителей. В настоящем стандарте объекты стандартизации обозначены в таблице знаком "X".
Примечание - Обнаружение дорожных пробок не входит в функции системы TIWS, описываемой настоящим стандартом. Система должна выявлять остановившиеся транспортные средства или медленно движущиеся транспортные средства в конце скопления автомобилей.
Таблица 1 - Концепция системы оповещения о дорожных происшествиях TIWS
Системы обнаружения | Объекты обнаружения | ||||||
Уровень 1 | Уровень 2 | Уровень 3 | Уровень 4 | Методы передачи информации | |||
Система инфраструктуры | Инфраструктура - инфраструктура | Класс 1 | X | - | - | - | Информационное табло |
Класс 2 | X | - | - | - | Различные | ||
Совместная система | Инфраструктура - транспортное средство | Класс 3 | - | - | - | - | Радиомаяк, излучающий коаксиальный кабель, информационные табло, радио |
Примечание - Уровни определены в 3.3. | |||||||
3.3 Объекты, составляющие затор на дороге, и пределы возможностей обнаружения
3.3.1 Объекты обнаружения
3.3.1.1 Уровень 1: остановившиеся транспортные средства и медленно движущиеся транспортные средства кроме мотоциклов.
3.3.1.2 Уровень 2: уровень 1 + изменение в режиме движения транспортных средств с целью избежать каких-либо имеющихся препятствий или опасных условий.
3.3.1.3 Уровень 3: уровень 2 + мотоциклы.
3.3.1.4 Уровень 4: уровень 3 + иные препятствия.
Примечание 1 - В настоящем стандарте объектом стандартизации является уровень 1.
Примечание 2 - Предельные размеры препятствий, относящихся к уровню 4, не являются предметом настоящего стандарта.
Примечание 3 - Понятие транспортного средства включает также трехколесные транспортные средства.
3.3.2 Пределы возможностей обнаружения
Пределы возможностей обнаружения в поперечном сечении дороги должны включать все полосы движения и обочины. Пределы возможностей обнаружения в продольном сечении дороги будут зависеть от характеристик инструментов наблюдения, времени обнаружения, высоты установки инструментов обнаружения и периферийной среды (см. приложение D).
3.4 Типы сенсоров
В соответствии с рисунком 1 в системе могут использоваться различные типы сенсоров. Однако в настоящем стандарте рассматривается использование только камер наблюдения, изображения с которых подвергается обработке.
3.5 Обеспечение информацией
3.5.1 Необходимые функции для обеспечения информацией
3.5.1.1 Обеспечение информацией водителей
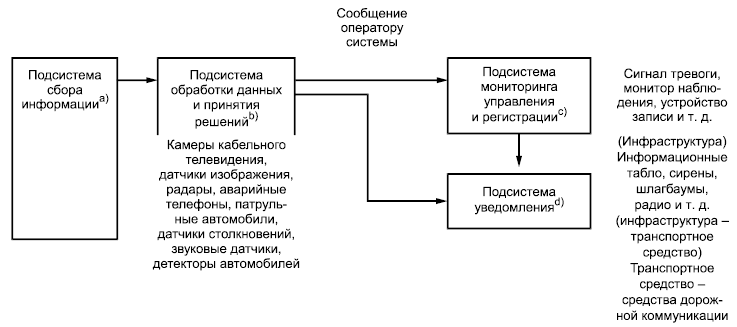
Система в соответствии с рисунком 2 предусматривает много способов обеспечения водителей информацией, однако в настоящем стандарте рассматривается использование только информационного табло в качестве такого способа.
|
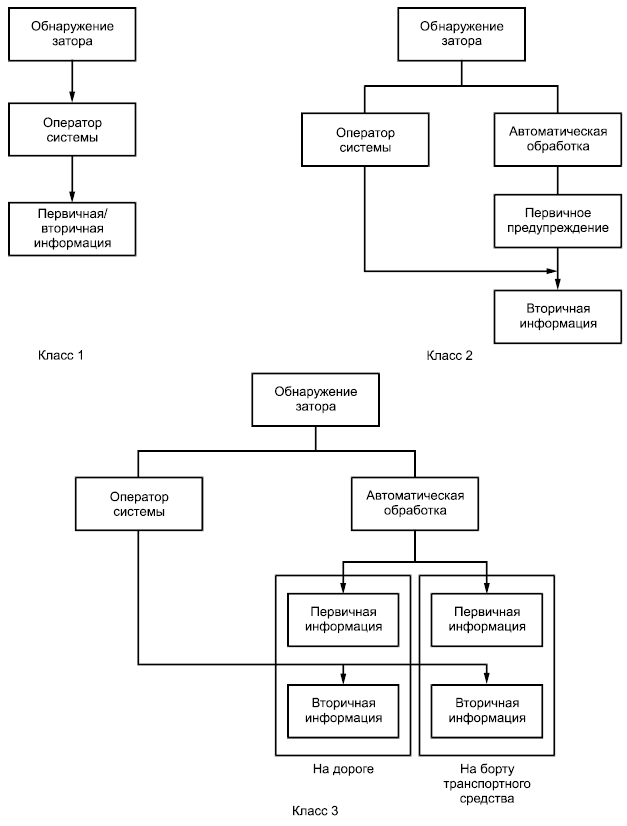
Рисунок 2 - Процессы обеспечения информацией для каждого класса
3.5.1.2 Сообщения оператору системы
Факт возникновения затора должен быть сообщен оператору системы, который должен иметь возможность, наблюдая изображения с камер наблюдения, убедиться в возникновении затора.
3.5.2 Обнаружение события
Система обнаруживает остановившиеся или медленно движущиеся транспортные средства.
3.5.3 Уровни информации
Система предусматривает два уровня информации: первичная информация и вторичная информация.
Временная взаимосвязь уровней информации показана на рисунке 3 (см. приложения Е и F).
|

где - момент времени, в который произошло событие;
- момент времени, в который были обнаружены остановившиеся или медленно движущиеся транспортные средства;
- момент времени, в который оператор системы получил подтверждение о типе события, условиях, месте события и необходимых действиях.
Рисунок 3 - Уровни информации.
3.5.4 Типы информации
Типы информации могут быть классифицированы следующим образом:
1) Инструкции для водителя: остановиться, ограничить скорость, сменить полосу движения;
2) Предупреждения: Предупреждение о столкновении или опасной дорожной обстановке впереди;
3) Разъяснение текущей ситуации: Тип затора, координаты места происшествия, включая идентификационный номер и наименование дороги и информацию о полосах проезжей части, затронутых затором, предпринимаемые меры реагирования или действия по восстановлению движения;
4) Прогноз развития ситуации: прогноз времени возобновления движения, оценка продолжительности расчистки места происшествия.
Типы информации, предусмотренные для каждого уровня, указаны в таблице 2.
Таблица 2 - Уровни и типы информации
Типы информации | Типы сообщения | Примеры сообщений | Уровни информации | |
Первичная | Вторичная | |||
Инструкция | Инструкция по скорости движения | Остановиться, снизить скорость, .... | - | X |
Инструкция по изменению маршрута | Использовать альтернативный маршрут | - | X | |
Инструкция по изменению полосы движения | Двигаться по правой полосе, левая полоса закрыта, ... | - | X | |
Предупреждения | Предупреждение о возможном наезде на впереди идущие транспортные средства | Движение впереди остановилось, движение впереди замедлилось | X | X |
Предупреждение об опасной ситуации впереди | Впереди препятствие на дороге, впереди дорожно-транспортное происшествие | - | X | |
Объяснение текущей ситуации | Автодорога, где имел место инцидент | Автодорога Р 12 на участке Верхнеухтомский - пограничный переход закрыта | - | X |
Место инцидента | Дорожно-транспортное происшествие в 250 м впереди... | - | X | |
Ситуация с полосами движения при инциденте | Одна из полос движения блокирована... | - | X | |
Место начала транспортной "пробки" | Впереди транспортная пробка | - | X | |
Управление движением | Левая полоса закрыта | - | X | |
Прогноз ситуации | Прогноз по режиму движения | От 20 мин до XX, задержка на 30 мин... | - | X |
Оценка времени на восстановительные работы | Закрыта на 1 час | - | X | |
3.5.5 Индикация сбоя в системе
В случае сбоя в системе (ее неисправности) должны быть использованы слова или легко воспринимаемые символы для индикации того, что система не в состоянии обеспечить информирование водителей о дорожной ситуации.
3.6 Глубина зоны предоставления информации для водителей
3.6.1 Определение мест информирования водителей
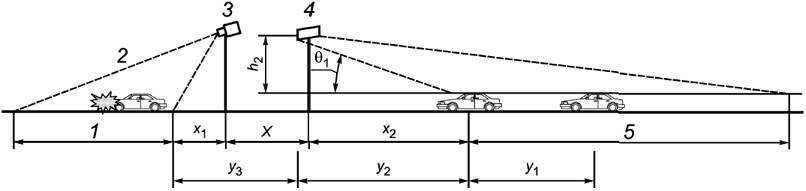
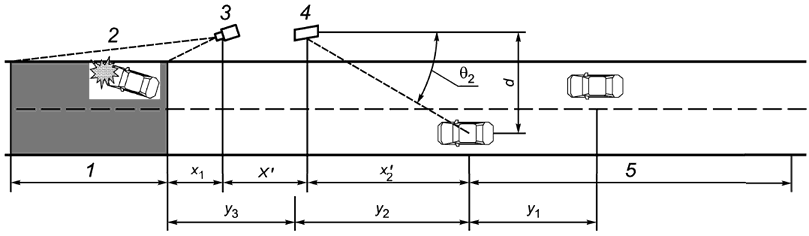
Расположение информационного табло по отношению к расположению камеры показано на рисунке 4.
|
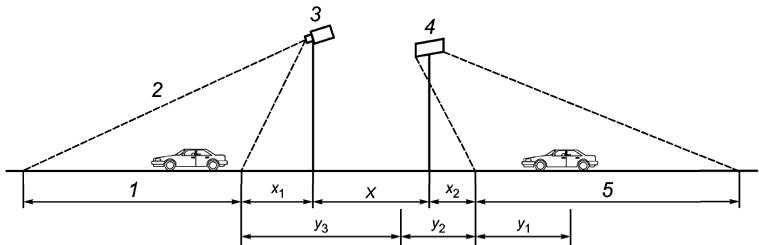
1 - зона покрытия камеры наблюдения; 2 - место возникновения затора; 3 - камера наблюдения; 4 - информационное табло; 5 - зона, в которой возможно распознавание сообщения на табло; - определяемое расстояние между местами установки камеры и табло;
- слепая зона камеры;
- предел видимости информационного табло;
- дистанция принятия решения;
- дистанция реакции водителя;
- тормозной путь.
Рисунок 4 - Расположение информационного табло по отношению к расположению камеры
Информационное табло должно быть установлено на расстоянии, достаточном для того, чтобы транспортное средство успело остановиться до подъезда к месту затора после получения информации об этом (см. приложение G).
Минимальное значение расстояния от установки камеры до установки табло рассчитывается по формуле
![]() , (1)
, (1)
где значения величин указаны в пояснениях к рисунку 4.
В реальных условиях желательно предупреждать водителей как можно раньше, используя дополнительное информационное оборудование, расположенное на наибольшем возможном удалении до информационного табло, расположение которого определяется формулой (1).
3.6.2 Время реакции системы (время с момента возникновения дорожного затора до момента, когда информация начинает передаваться),
Время реакции системы должно быть минимизировано, так чтобы с момента возникновения инцидента количество транспортных средств, которые не смогли получить необходимую информацию, было минимальным (см. рисунок 5).
|
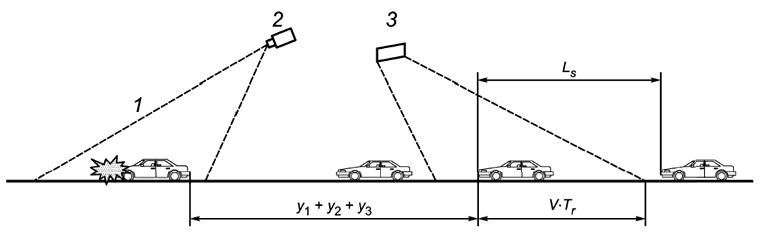
1 - возникший затор; 2 - камера наблюдения; 3 - информационное табло; - средний интервал;
- время реакции системы;
- скорость транспортного потока
Рисунок 5 - Схема, отображающая время реакции системы в терминах расстояний
Для определения числа транспортных средств (), которые не смогут получить информацию о транспортном заторе при движении транспортного потока со средним интервалом (
), существует следующее уравнение (см. приложение Н):
![]() , (2)
, (2)
таким образом,
![]() , (3)
, (3)
где - число транспортных средств, которые не смогли получить информацию о транспортном заторе (транспортных средств на полосу движения);
- время реакции системы, с;
- скорость транспортного потока, м/с.
3.7 Интервал установки камер наблюдения
Время срабатывания при обнаружении инцидента будет коротким в местах, где камеры установлены с небольшим интервалом между собой, и более долгим в местах, где расстояние между ними увеличено. Таким образом, задержка в передаче информации будет зависеть от интервала расстояний между камерами.
Короткое время срабатывания при обнаружении инцидента требуется в таких местах с ухудшенной видимостью, как крутые повороты, туннели; более длительное время срабатывания допустимо на участках с хорошей видимостью на прямых отрезках дороги.
Интервал установки камер наблюдения должен быть определен исходя из того, что период задержки в предоставлении информации должен соотноситься с характером участка дороги, на котором осуществляется видеонаблюдение и предоставление информации водителям, что в свою очередь определяется условиями размещения камер видеонаблюдения и конфигурацией дороги (см. приложение I).
4 Метод тестирования системы
Тестирование системы сочетает тестирование характеристик системы и ее функциональных показателей (см. приложение J).
4.1 Тестирование характеристик системы
Тестирование характеристик системы должно включать тест на обнаружение объекта, тест на размеры зоны обнаружения, тест на время срабатывания при обнаружении, тест на точность обнаружения. Данное тестирование характеристик системы должно быть проведено с использованием цифрового видеоматериала, отснятого с реальной ситуации на дороге при нормальном движении и при возникновении затора и/или с использованием специального тестового сценария. Любой из методов тестирования должен соотноситься с конкретными условиями установки камер наблюдения и конфигурацией дороги. Данный вид теста может быть проведен в полевых условиях; при этом продолжительность теста может составлять несколько месяцев, поскольку необходимо оценить степень точности распознавания, ложные сигналы тревоги и другие параметры.
4.2 Функциональное тестирование системы
Функциональное тестирование системы требует того, чтобы система распознавала возникший затор и передавала информацию об этом водителям через информационные табло, а также передавала сигнал тревоги оператору системы с включением в процесс подсистем мониторинга, управления, записи данных и уведомления. Функциональное тестирование системы определяется конфигурацией системы и составом ее компонентов.
Функция контроля яркости оптического канала и выявление выхода из строя камеры наблюдения при помощи системы обработки изображения и контроля рабочего состояния в режиме реального времени может потребоваться как дополнительная.
Приложение А
(справочное)
Классификация происшествий, повлекших транспортные заторы
А.1 Характеристики происшествий
Для того чтобы разъяснить происшествия в объектах системы, происшествия, относящиеся к водителям, ранжированы в соответствии со своими характеристиками (место происшествия, повторяемость происшествия, возможность предвидения, степень воздействия на дорожное движение, степень экстренности происшествия, классифицированными в таблице А.2.
А.1.1 Определение характеристики происшествия
А.1.1.1 Место происшествия
Представляет собой географические границы происшествия, случившегося в рассматриваемый момент. Классифицируется по двум категориям, к первой из которых относятся происшествия, имеющие место в данном конкретном месте, такие как столкновение, ко вторым относятся происшествия, имеющие место в масштабах некоторого региона, такие как землетрясение.
А.1.1.2 Повторяемость происшествия
Представляет собой степень случайности происшествия, происходящего в данный момент времени. Классифицируется по двум категориям, к первой из которых относятся происшествия, случающиеся внезапно, такие как неожиданное столкновение или возгорание, ко второй категории относятся повторяющиеся происшествия. К этой категории относятся пробки.
А.1.1.3 Возможность предвидения
Такая возможность существует, если событие или происшествие можно предвидеть анализом некоторых факторов. К предсказуемым событиям можно отнести такие погодные явления, как снег или дождь, к непредсказуемым событиям относятся такие, как столкновение или возгорание.
А.1.1.4 Степень воздействия на дорожное движение
Представляет степень воздействия происшествия на дорожное движение. Классифицируется по двум категориям: к первой относятся происшествия с большой степенью влияния, такие, например, как прекращение движения из-за оползня; к происшествием незначительного влияния относится, например, влияние плохой погоды.
А.1.1.5 Степень экстренности происшествия
Представляет собой степень экстренности для обработки сообщения о происшествии. Существуют два уровня экстренности: к высокому уровню экстренности принадлежат происшествия со столкновением или возгоранием. К низкому уровню экстренности в обработке информации о происшествии относится, например, дождь.
А.1.2 Выборка происшествий из объектов
Происшествия, являющиеся причиной заторов в данной системе имеют следующие характеристики:
- место происшествия является локальным;
- повторяемость происшествия является внезапной;
- возможность предвидения - непредсказуемое происшествие;
- степень воздействия на дорожное движение - высокая;
- степень экстренности происшествия - высокая.
Происшествия, характеристики которых описаны выше, приведены в таблице А.1.
Таблица А.1 - Происшествия, выбранные из объектов системы, явившиеся причиной заторов
Классификация происшествия | Содержание происшествия |
Внезапные происшествия | Столкновение, возгорание автомобиля, возгорание на обочине, возгорание в придорожной зоне, затопление дорожного полотна. |
Пробки | Место окончания пробки |
Дорожные работы | Медленно движущиеся транспортные средства в зоне выполнения дорожных работ |
Таблица А.2 - Систематизация характеристик и происшествий
Событие | Характеристика события | |||||||||||
Классификация | Содержание | Место происшествия | Повторяе- | Возможность предвидения | Степень воздействия на дорожное движение | Степень экстренности происшествия | Объект | |||||
Локальное | Региональное | Внезапное | Повторяю- | Предска- | Непред- | Малая | Большая | Высокая | Низкая | Проис- | ||
Внезапно происходящее событие | Столкновение | X | - | X | - | - | X | X | X | X | - | X |
Возгорание | X | - | X | - | - | X | X | - | X | - | X | |
Пожар на обочине | X | - | X | - | - | X | X | - | X | - | X | |
Затопление дорожного полотна | X | - | X | - | - | X | X | - | X | - | X | |
Оседание почвы | X | - | X | - | - | X | X | - | X | - | X | |
Обвал | X | - | X | - | - | X | X | - | X | - | X | |
Упавшее дерево | X | - | X | - | - | X | X | - | X | - | X | |
Высокая волна | X | - | X | - | - | X | X | - | X | - | X | |
Оползень | X | - | X | - | - | X | X | - | X | - | X | |
Снежная лавина | X | - | X | - | - | X | X | - | X | - | X | |
Землетрясение | - | X | X | - | - | X | X | - | X | - | X | |
Препятствие на дороге | X | - | X | - | - | X | X | X | X | - | X | |
Медленно движущееся транспортное средство | X | - | X | - | - | X | X | X | X | X | X | |
Неисправное транспортное средство | X | - | X | - | - | X | X | X | X | X | X | |
Строительство | Строительство | X | - | - | X | X | - | X | X | - | X | - |
Погода | Дождь | - | X | - | X | X | - | X | X | - | X | - |
Снег | - | X | - | X | X | - | X | - | - | X | - | |
Буран | - | X | - | X | X | - | X | - | - | X | - | |
Туман | - | X | - | X | X | - | X | - | - | X | - | |
Сильный ветер | - | X | - | X | X | - | X | X | - | X | - | |
Дорожные условия | Мокрая дорога | - | X | - | X | X | - | - | X | - | X | - |
Скользкая дорога | - | X | - | X | X | - | X | - | - | X | - | |
Гололед | - | X | - | X | X | - | X | - | - | X | - | |
Слой снега на дороге | - | X | - | X | X | - | X | - | - | X | - | |
Пробки | Пробка | X | - | - | X | X | X | X | - | - | X | - |
Начало пробки | - | X | X | - | - | X | X | - | - | X | X | |
Дорожные работы | Медленно движущееся транспортное средство на месте работ | X | - | X | - | - | X | X | X | - | X | X |
Работы на дорожном полотне | X | - | X | - | - | - | - | X | - | X | - | |
Приложение В
(справочное)
Вопросы, являющиеся и не являющиеся предметом стандартизации
В.1 Классификация объектов
Таблица В.1 разделяет вопросы, связанные с системой оповещения о заторах на дороге, на являющиеся и не являющиеся предметом стандартизации. Причины, по которым вопросы, указанные во второй колонке, исключены из предмета стандартизации, объясняются в В.2.
Таблица В.1 - Вопросы, являющиеся и не являющиеся предметом стандартизации
Вопросы, являющиеся предметом стандартизации | Вопросы, не являющиеся предметом стандартизации |
Классификация | Средства коммуникации |
Объекты, обнаруживаемые системой | Точность обнаружения |
Зона обнаружения объектов | |
Типы сенсоров | |
Время отклика системы обнаружения | |
Места установки информационных устройств | |
Метод тестирования |
В.2 Вопросы, не являющиеся предметом стандартизации
В.2.1 Средства коммуникации
Технологии сбора и передачи информации, включая средства коммуникации "дорога - транспортное средство" и "транспортное средство - транспортное средство" находятся в стадии разработки. Поскольку ожидается разработка новых сенсоров и средств коммуникации, их стандартизация является преждевременной.
В.2.2 Точность обнаружения
Транспортные потоки меняются во времени в зависимости от типа дороги, ее конфигурации, плотности движения, погодных условий и т.д. Не существует единого метода, который всесторонне учитывал бы все эти сложные элементы, в особенности тип сенсоров, время обнаружения и точность обнаружения. Эти вопросы могут быть учтены в процессе развития.
Приложение С
(справочное)
Место развертывания системы
С.1 Потребности водителя и оператора системы
С.1.1 Потребности водителя
Следующие три потребности отражают точку зрения водителя:
a) потребность знать, какие события произошли впереди по ходу движения:
- трудно определить какие события произошли впереди по ходу движения в туннеле, за крутым поворотом или за переломом дороги;
- система должна функционировать также и в условиях плохой видимости, например при густом тумане или ночью;
b) потребность свести к минимуму ущерб от вторичной аварии:
- трудно избежать вторичной аварии на дороге в закрытом пространстве, таком как туннель. Помехи движению могут также быть обнаружены на дороге с уклоном, на дороге с мокрым покрытием, при снегопаде и гололедице в момент, когда уже трудно избежать вторичной аварии;
c) потребность предусмотреть заранее информацию о заторе перед пересечением дорог:
- движущиеся следом транспортные средства должны иметь возможность выбора оптимального маршрута движения за счет получения упреждающей информации о заторах на подъезде к перекресткам, где возможно изменение маршрута движения.
С.1.2 Потребности оператора системы
Следующие потребности могут быть представлены как потребности оператора системы. Потребностями оператора системы являются все потребности, запрашиваемые в случае дорожного затора. Вопросы выбора места развертывания системы в настоящем стандарте не рассматриваются.
Необходимой является быстрая обработка информации о событии и сохранение равномерного дорожного движения.
С.2 Выбор места развертывания системы
Результат рассмотрения вопроса места установки системы, исходя из конфигурации дороги и дорожного окружения, с учетом потребности системы приведен в таблице С.1.
Таблица С.1 - Место установки и потребности системы
Потребности системы | Место установки системы | |||||||||||||||||||
Характер участка дороги | Дорожное окружение | |||||||||||||||||||
Прямой участок | Кривая | Тун- | Мост | Развязка | Платежный терминал | Область аномальной погоды | Область аномальных дорожных условий | |||||||||||||
Ровный | Подъем | Спуск | Лож- | Пере- | Плав- | Крутая | При- | Разви- | Перек- | На пере- | На глав- | Силь- | Силь- | Снего- | Мок- | Голо- | Слой снега на дороге | |||
а) Потребность знать, какие события произошли впереди по ходу движения | - | - | - | - | X | - | X | X | - | - | - | - | - | - | X | X | X | - | - | - |
b) Потребность свести к минимуму ущерб от вторичных аварий и свести к минимуму повреждения в месте инцидента для предотвращения расширения зоны инцидента за счет вторичных аварий | - | - | X | - | - | - | - | X | - | - | - | - | - | - | - | - | - | X | X | X |
с) Потребность предусмотреть заранее информацию о заторе перед пересечением дорог | - | - | - | - | - | - | - | - | - | - | X | X | - | - | - | - | - | - | - | - |
Приложение D
(справочное)
Особые случаи зоны охвата камеры наблюдения
D.1 Факторы воздействия
Примеры факторов воздействия на зону охвата камеры наблюдения приведены ниже.
D.1.1 Характеристики аппаратуры:
- характеристики камеры (фокусное расстояние);
- время срабатывания сенсора распознавания.
D.1.2 Высота установки камеры наблюдения:
- 3,5 м, 6,5 м и т.д.
D.1.3 Окружающие условия:
- погода (ясно, облачно, дождь, туман и т.д.);
- день или ночь;
- характер дорожных условий (освещенный участок, туннель и т.д.);
- загрязнение линз камеры.
D.2 Пример конкретной системы
Пример характеристик конкретно существующей системы приведен в таблице D.1.
Таблица D.1 - Пример характеристик конкретно существующей системы
Объект распознавания | Высота установки камеры, м | Зона охвата камеры, м | Время срабатывания сенсора распознавания, с | Место установки системы |
Остановившееся транспортное средство | 10 | от 20 до 150 | 2,0 | Открытое пространство |
5,5 | от 20 до 120 | 2,0 | Туннель | |
3,5 | от 20 до 170 | 2,0 | Туннель | |
6,5 | от 20 до 90 | 2,0 | Крутой поворот | |
Медленно движущееся транспортное средство | 5,5 | от 20 до 70 | 0,2 | Туннель |
3,5 | от 20 до 70 | 0,2 | Туннель |
Приложение Е
(справочное)
Символы
Примеры символов, приведенные в данном приложении, предполагают, что затор на дороге произошел, и водители должны принять меры для предупреждения столкновения с замедлившимися или стоящими впереди них транспортными средствами.
Е.1 Первичная информация
Рисунок Е.1 показывает примеры символов для первичной информации. Символ "!" следует использовать в рамках либо треугольного, либо ромбического знака.
|
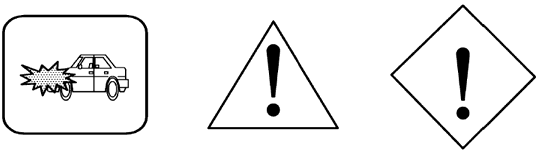
Рисунок Е.1 - Примеры символов для первичной информации
Е.2 Вторичная информация
Рисунок Е.2 показывает примеры символов, которые информируют о блокированных полосах движения, рекомендуемых изменениях полос движения и транспортных пробках соответственно. Дополнительная информация об аварийных полосах движения может отражаться дополнительными словами или дополнительными символами.
|
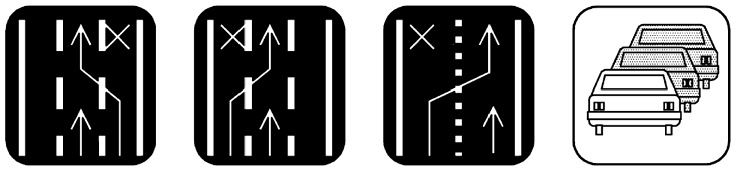
Рисунок Е.2 - Примеры символов для вторичной информации
Приложение F
(справочное)
Пример формирования содержания информационного сообщения
Примеры формирования содержания конкретных сообщений при транспортных заторах уровня 1 показаны в таблице F.1. Содержание сообщений может разниться в зависимости от места установки системы в соответствии с приложением С.
Таблица F.1 - Пример формирования содержания информационного сообщения
Обеспечиваемый уровень информации | Тип события | Содержание информационного сообщения | Пример |
Первичная информация | Остановившиеся транспортные средства | Типы дорожных заторов, рекомендации по скоростному режиму | Впереди остановившиеся транспортные средства, снизить скорость |
Медленно движущиеся транспортные средства | Типы дорожных заторов, рекомендации по скоростному режиму | Впереди медленно движущиеся транспортные средства, снизить скорость | |
Вторичная информация | Дорожно-транспортное происшествие (блокированы все полосы движения) | Типы дорожных заторов, место происшествия, полоса, на которой имело место происшествие, развитие ситуации, рекомендации по остановке | Впереди в X м дорожно-транспортное происшествие, снизить скорость |
Дорожно-транспортное происшествие (блокированы отдельные полосы движения) | Типы дорожных заторов, место происшествия, полоса, на которой имело место происшествие, развитие ситуации, рекомендации по выбору скорости или изменению полосы | Впереди в X м дорожно-транспортное происшествие на левой полосе, снизить скорость | |
Неисправные транспортные средства | Типы дорожных заторов, место происшествия, полоса, на которой имело место происшествие, развитие ситуации, рекомендации по выбору скорости или изменению полосы | Впереди в X м остановившиеся транспортные средства, снизить скорость | |
Медленно движущиеся транспортные средства | Типы дорожных заторов, место происшествия, полоса, на которой имело место происшествие, развитие ситуации, предупреждение о столкновении | Медленно движущиеся транспортные средства на левой полосе в X м, внимание | |
Начало пробки | Типы дорожных заторов, место происшествия, полоса, на которой имело место происшествие, развитие ситуации, рекомендации по выбору скорости или предупреждение о столкновении | Начало пробки впереди в X м, снизить скорость |
Приложение G
(справочное)
Характерные примеры интервалов установки информационных табло
G.1 Объяснение интервалов установки информационных табло
Ниже приводится объяснение тех параметров, которые составляют определяемую величину интервала установки информационных табло .
G.1.1 Информационное табло, размещенное над полосой движения
|
1 - зона наблюдения камеры; 2 - место возникновения затора; 3 - камера наблюдения; 4 - информационное табло; 5 - зона, в которой возможно распознавание сообщения на табло; - определяемое расстояние между местами установки камеры и табло;
- слепая зона камеры;
- предел видимости информационного табло;
- дистанция принятия решения;
- дистанция реакции водителя;
- тормозной путь;
- вертикальный угол предельной видимости табло;
- высота установки табло.
Рисунок G.1 - Параметры верхней установки камеры наблюдения
G.1.2 Информационное табло, размещенное сбоку от дороги
|
1 - зона наблюдения камеры; 2 - место возникновения затора; 3 - камера наблюдения; 4 - информационное табло; 5 - зона, в которой возможно распознавание сообщения на табло; - определяемое расстояние между местами установки камеры и табло;
- слепая зона камеры;
- предел видимости информационного табло;
- дистанция принятия решения;
- дистанция реакции водителя;
- тормозной путь;
- горизонтальный угол предельной видимости табло;
- расстояние по ширине от глаз водителя до табло.
Рисунок G.2 - Параметры боковой установки камеры наблюдения
G.1.3 Расчет размерных параметров установки
G.1.3.1 Расчет расстояния предельной видимости
G.1.3.1.1 Расстояние предельной видимости для верхней установки камеры наблюдения
![]() , (G.1)
, (G.1)
где - расстояние по вертикали от глаз водителя до информационного табло;
- вертикальный угол предельной видимости табло, равный 7°.
G.1.3.1.2 Расстояние предельной видимости для боковой установки камеры наблюдения
![]() , (G.2)
, (G.2)
где - расстояние по ширине от глаз водителя до информационного табло;
- горизонтальный угол предельной видимости табло, равный 12°.
G.1.3.2 Расчет дистанции принятия решения
![]() , (G.3)
, (G.3)
где - скорость транспортного потока, м/с;
1,5 - время принятия решения, с.
G.1.3.3 Расчет дистанции реакции водителя
![]() , (G.4)
, (G.4)
где - скорость транспортного потока, м/с;
1,0 - время реакции водителя, с.
G.1.3.4 Расчет тормозного пути
![]() , (G.5)
, (G.5)
где - скорость транспортного потока, км/ч;
- коэффициент сцепления колеса с дорогой (на мокрой дороге).
Примечание - Значение коэффициента в данном стандарте в зависимости от скорости транспортного потока принимается равным 0,33 при скорости 60 км/ч, 0,31 при скорости 80 км/ч, 0,30 при скорости 100 км/ч и 0,29 при скоростях 120 и 140 км/ч.
G.2 Характерный пример
Результаты расчета интервалов установки информационных табло при использовании условий, указанных ниже приведены в таблицах G.1 и G.2.
a) 60, 80, 100, 120, 140 км/ч;
b) 20 м;
c) 30 м;
d) 38 м.
Таблица G.1 - Интервалы установки информационных табло при верхней установке камеры наблюдения при различных условиях
|
|
|
|
|
60 | 25,0 | 16,7 | 42,9 | 9,6 |
80 | 33,3 | 22,2 | 81,3 | 53,5 |
100 | 41,7 | 27,8 | 131,2 | 109,0 |
120 | 50,0 | 33,3 | 195,5 | 178,8 |
140 | 58,3 | 38,9 | 266,1 | 255,0 |
Таблица G.2 - Интервалы установки информационных табло при боковой установке камеры наблюдения при различных условиях
|
|
|
|
|
60 | 25,0 | 16,7 | 42,9 | 1,6 |
80 | 33,3 | 22,2 | 81,3 | 45,5 |
100 | 41,7 | 27,8 | 131,2 | 101,0 |
120 | 50,0 | 33,3 | 195,5 | 170,8 |
140 | 58,3 | 38,9 | 266,1 | 247,0 |
Приложение Н
(справочное)
Характерный пример определения времени реакции системы
Результаты расчета времени реакции системы при различных условиях, указанных ниже, приведены в таблице Н.1.
![]() , (Н.1)
, (Н.1)
где - число транспортных средств, не имевших возможность получить информацию о возникшем заторе, выраженное в числе транспортных средств, приходящихся на одну полосу движения;
- средний интервал между транспортными средствами, м;
- скорость транспортного потока, м/с.
В таблице Н.1 показан пример пробного расчета:
- для 1, 2, 3 (автомобилей на полосу);
- 600, 1200, 1800 (автомобилей в час на полосу) - плотность транспортного потока;
- 60, 80, 100, 120 (км/ч).
Значения ![]() взяты из результатов пробного расчета приложения G
взяты из результатов пробного расчета приложения G
Примечание - Отрицательные значения результатов расчета времени реакции системы означают, что при данных параметрах транспортного потока для водителя, следующего в транспортном средстве с расчетным номером
, дистанции принятия решения, реакции водителя и тормозной путь в сумме оказываются больше остающегося расстояния до затора, поэтому система не в состоянии обеспечить своевременное информирование этого водителя даже при сколь угодно малом времени реакции системы.
Таблица Н.1 - Время реакции системы при различных условиях
Число автомобилей в час на полосу |
|
| Число автомобилей на полосу |
|
600 | 60 | 100,0 | 1 | 0,9 |
2 | 6,9 | |||
3 | 12,9 | |||
80 | 133,3 | 1 | Минус 0,2 | |
2 | 5,8 | |||
3 | 11,8 | |||
100 | 166,7 | 1 | Минус 1,2 | |
2 | 4,8 | |||
3 | 10,8 | |||
120 | 200,0 | 1 | Минус 2,4 | |
2 | 3,6 | |||
3 | 9,6 | |||
1200 | 60 | 50,0 | 1 | Минус 2,1 |
2 | 0,9 | |||
3 | 3,9 | |||
80 | 66,7 | 1 | Минус 3,2 | |
2 | Минус 0,2 | |||
3 | 2,8 | |||
100 | 83,3 | 1 | Минус 4,2 | |
2 | Минус 1,2 | |||
3 | 1,8 | |||
1800 | 60 | 33,3 | 1 | Минус 3,1 |
2 | Минус 1,1 | |||
3 | 0,9 | |||
80 | 44,4 | 1 | Минус 4,2 | |
2 | Минус 2,2 | |||
3 | Минус 0,2 |
Приложение I
(справочное)
Интервал установки камер наблюдения
Метод установки камер наблюдения зависит от таких параметров дороги, как радиус кривизны, ширина дорожного полотна, конструктивной скорости транспортных средств и других параметров.
I.1 Метод установки при безразрывной (сплошной) зоне покрытия камер наблюдения
Данный метод применяется на участках с плохой видимостью, крутых поворотах дороги и т.п.
Интервал установки камер наблюдения определяется размером зоны покрытия одной камеры наблюдения с учетом их перекрытия на длину транспортного средства.
I.2 Метод установки при дискретном покрытии
Данный метод применяется на прямых участках дороги с хорошей просматриваемостью и обусловлен невысоким риском возникновения заторов в таких местах. Интервалы установки камер наблюдения определяются с учетом времени задержки, в течение которого информация о параметрах движения, таких как плотность потока и скорость будет собрана, обработана и в обработанном виде будет передана двигающимся транспортным средствам.
Непрямой метод выявления затора с использованием технологии нейронных сетей или других технологий различаются разными степенями проработки соответствующей технологии, а время реакции системы и точность распознавания зависят от числа полос движения, плотности транспортного потока и других параметров. Камеры наблюдения должны устанавливаться с обеспечением безразрывного покрытия и все полосы движения должны находиться под прямым наблюдением. В этом смысле непрямой метод выявления затора может рассматриваться как первый этап к полному покрытию всех полос движения, при условии оценки эффективности и затрат на установку системы.
При выявлении возникшего затора с помощью непрямого метода используется факт возникновения изменений параметров транспортного потока. Если параметры транспортного потока не меняются, обнаружить затор невозможно. Обычно, при использовании непрямого метода имеет место небольшое запаздывание по времени при выявлении затора, так что информация для водителей движущихся транспортных средств будет передана также с задержкой.
Простая модель транспортного затора, произошедшего вне зоны покрытия камеры наблюдения, показана на рисунке I.2. При возникновении затора и блокировании полос движения, как показано на рисунке I.1, движение транспортного потока через несколько минут приходит к состоянию затора, т.е. плотность транспортного потока за местом инцидента разрежается, а скорость потока перед этим местом уменьшается.
|
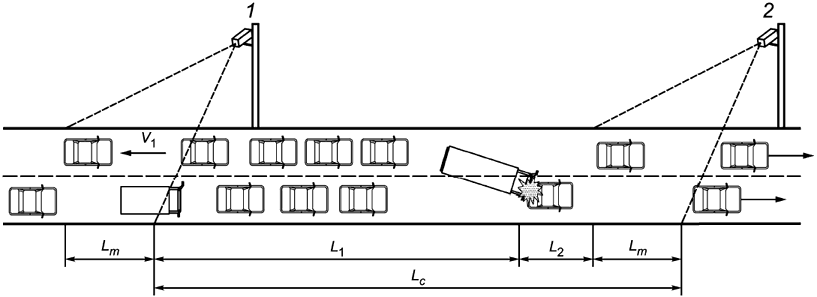
1 - положение камеры А; 2 - положение камеры В; - интервал между положениями камер;
- зона покрытия камеры;
- скорость распространения затора
Рисунок I.1 - Модель транспортного затора при дискретном покрытии камер наблюдения
|
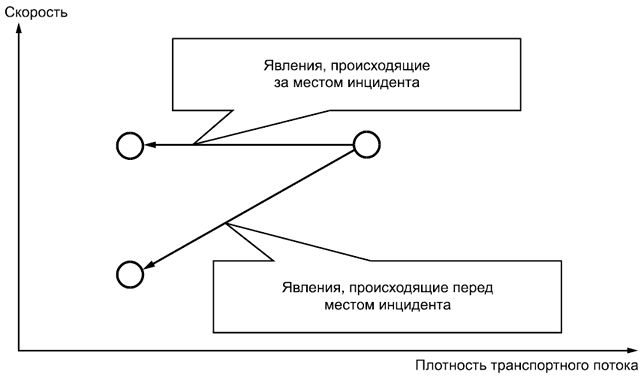
Рисунок I.2 - Модель явлений, происходящих при транспортном заторе
Интервалы установки камер при дискретном покрытии зависят от величины временной задержки, в течение которой движущиеся транспортные средства могут быть классифицированы как медленно движущиеся транспортные средства и/или как остановившиеся транспортные средства.
Время задержки рассчитывается, исходя из расстояния между местом инцидента и точкой наблюдения, деленному на скорость распространения затора, как показано в формуле (I.1) для случая максимально возможного расстояния между местом инцидента и точкой наблюдения, при котором место инцидента еще не попадает в зону покрытия следующей по ходу движения транспортных средств камеры наблюдения.
Интервал установки камер, при котором максимально допустимое время задержки еще не превышает определенного заданного значения, выражается формулой (I.2).
![]() ; (I.1)
; (I.1)
![]() , (I.2)
, (I.2)
где - интервал установки камер наблюдения, м;
- зона покрытия камеры, м.
![]() , (I.3)
, (I.3)
где - скорость распространения затора, м/с;
- плотность транспортного потока (автомобилей в секунду на полосу);
- средний интервал между остановившимися в заторе транспортными средствами, м.
Примечание - Скорость распространения затора в случае не полной остановки транспортных средств, а только снижения их скорости движения, требует определения по другой, более сложной формуле.
Приложение J
(справочное)
Метод тестирования системы
Метод тестирования характеристик системы должен иметь три фазы. В первой фазе основные характеристики обработки изображения должны быть испытаны у производителя при использовании цифровой записи видеосигналов дорожной обстановки, при нормальных условиях и при различных вариантах транспортных заторов. Тестирование характеристик системы должно включать тест на обнаружение объекта, тест на размеры зоны обнаружения, тест на время срабатывания при обнаружении.
Во второй фазе характеристики системы должны определяться на месте реальной установки при использовании испытательных транспортных средств в течение нескольких недель.
В последней фазе полевые испытания должны быть проведены при реальной установке с целью определения точности обнаружения, процента ложных срабатываний, времени реакции системы и т.д. при различных дорожных ситуациях и погодных условиях на протяжении периода нескольких месяцев или более.
УДК 004:006.354 | ОКС 33.040 |
Ключевые слова: системы, информация, управление, оповещения, дорожные происшествия, знаки, модель | |
Электронный текст документа
и сверен по:
, 2018
