
ГОСТ Р 58839-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Автомобильные транспортные средства
СИСТЕМЫ ОПЕРЕЖАЮЩЕГО ЭКСТРЕННОГО ТОРМОЖЕНИЯ
Общие технические требования и методы испытаний
Motor vehicles. Advanced Emergency Braking Systems. General technical requirements and test procedures
ОКС 35.240.60
Дата введения 2021-04-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 056 "Дорожный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 октября 2020 г. N 796-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Системы опережающего экстренного торможения предназначены для оснащения ими механических транспортных средств категорий M и N, согласно [1], обладающих уровнями автоматизации 0-4 по ГОСТ Р 58823, в частности, при эксплуатации транспортных средств категории ![]() и
и ![]() в населенных пунктах, и при эксплуатации транспортных средств категорий
в населенных пунктах, и при эксплуатации транспортных средств категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() на автомагистралях.
на автомагистралях.
Система опережающего экстренного торможения предназначена для выявления риска столкновения с целевыми объектами, находящимися впереди рассматриваемого транспортного средства, предупреждения о нем водителя рассматриваемого транспортного средства и приведения в действие тормозной системы рассматриваемого транспортного средства для снижения его скорости и недопущения столкновения либо смягчения его последствий в случае, если водитель не реагирует на предупреждение системы опережающего экстренного торможения, с целью повышения безопасности дорожного движения.
Система опережающего экстренного торможения не обладает средствами обнаружения целевых объектов, находящихся позади рассматриваемого транспортного средства.
Система опережающего экстренного торможения срабатывает только в таких условиях движения, при которых торможение позволяет не допустить дорожно-транспортного происшествия или смягчить его последствия.
Система опережающего экстренного торможения управляет исключительно скоростью рассматриваемого транспортного средства. Система опережающего экстренного торможения не обеспечивает изменение траектории или направления движения рассматриваемого транспортного средства во избежание столкновения с целевыми объектами.
Система опережающего экстренного торможения функционирует в рамках объективных ограничений, определенных в настоящем стандарте, и не освобождает водителя от обязанности контролировать дорожную обстановку. Ответственность за безопасность движения несет водитель. На транспортном средстве, оснащенном системой опережающего экстренного торможения, водитель должен постоянно оценивать дорожную обстановку для корректировки направления и скорости транспортного средства во избежание дорожно-транспортных происшествий.
1 Область применения
Настоящий стандарт распространяется на бортовые системы опережающего экстренного торможения (далее - СОЭТ), установленные на колесные транспортные средства (далее - ТС) категорий M и N в соответствии с [1] (за исключением ТС категории ![]() класса А и ТС категории
класса А и ТС категории ![]() классов I и II).
классов I и II).
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 14254 Степени защиты, обеспечиваемые оболочками (Код IP)
ГОСТ 15150 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 22748 Автотранспортные средства. Номенклатура наружных размеров. Методы измерений
ГОСТ 33991 Электрооборудование автомобильных транспортных средств. Электромагнитная совместимость. Помехи в цепях. Требования и методы испытаний
ГОСТ 33997-2016 Колесные транспортные средства. Требования к безопасности в эксплуатации и методы проверки
ГОСТ Р ИСО 15006 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению звуковой информации внутри транспортного средства
ГОСТ Р ИСО 15008 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению визуальной информации внутри транспортного средства и методы их проверки
ГОСТ Р 50607 Совместимость технических средств электромагнитная. Транспорт дорожный. Методы испытаний для электрических помех от электростатических разрядов
ГОСТ Р 51318.25 Совместимость технических средств электромагнитная. Транспортные средства, моторные лодки и устройства с двигателями внутреннего сгорания. Характеристики индустриальных радиопомех. Нормы и методы измерений для защиты радиоприемных устройств, размещенных на подвижных средствах
ГОСТ Р 52398 Классификация автомобильных дорог. Основные параметры и требования
ГОСТ Р 58823 Автомобильные транспортные средства. Системы автоматизации управления движением. Классификация и определения
ГОСТ Р 58834 Автомобильные транспортные средства. Бортовые системы помощи водителю. Общие технические требования к компонентам и методы испытаний
ГОСТ Р 58836 Автомобильные транспортные средства. Системы оптического распознавания объектов. Общие технические требования и методы испытаний
СП 34.13330.2012 "СНиП 2.05.02-85* Автомобильные дороги"
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов и сводов правил в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный документ, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого документа с учетом всех внесенных в данную версию изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то рекомендуется использовать версию этого документа с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
3.1 визуальные сообщения: Предупреждающие сообщения о препятствии либо состоянии СОЭТ, передающиеся водителю рассматриваемого ТС визуальным (оптическим) путем, представляющие собой пиктограммы, текстовые и/или графические сообщения на дисплее мультимедийной системы или комбинации приборов рассматриваемого ТС.
3.2 включение зажигания: Приведение ключа замка зажигания рассматриваемого ТС в положение "Включено" либо функционально соответствующий ему режим при отсутствии замка зажигания.
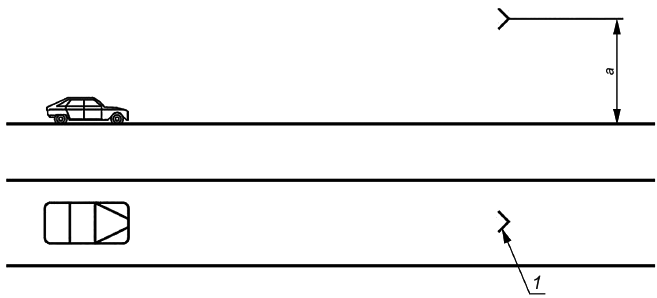
3.3 время до столкновения; ВДС: Интервал времени, за которое рассматриваемое ТС при относительной скорости ![]() преодолело бы расстояние, равное текущей дистанции между рассматриваемым ТС и целевым ТС.
преодолело бы расстояние, равное текущей дистанции между рассматриваемым ТС и целевым ТС.
Примечание - ВДС вычисляют путем деления дистанции "a" на относительную скорость "![]() " рассматриваемого ТС 1 (см. рисунок 1) и целевого ТС 2 в конкретный момент времени.
" рассматриваемого ТС 1 (см. рисунок 1) и целевого ТС 2 в конкретный момент времени.
|
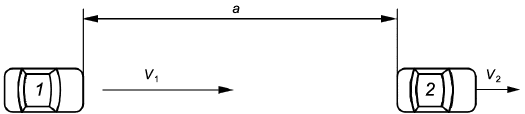
Рисунок 1 - Определение времени до столкновения
3.4 голосовые аудиосообщения: Предупреждающие аудиосообщения системы водителю рассматриваемого ТС, созданные путем имитации или записи голоса человека.
Примечание - Голосовые сообщения должны соответствовать ГОСТ Р ИСО 15006.
3.5 груженое транспортное средство: При отсутствии иных указаний - ТС, нагруженное таким образом, чтобы была достигнута его разрешенная максимальная масса.
3.6 дальность обнаружения компонента обнаружения: Дистанция до целевого объекта, при которой компонент обнаружения (видеокамера, радар, лидар или иной) способен определить наличие целевого объекта и/или характеристики его движения.
3.7 дальность обнаружения СОЭТ: Максимальная дальность обнаружения, выбираемая из дальностей обнаружения компонентов обнаружения, установленных на рассматриваемом ТС.
3.8 движущееся целевое транспортное средство (при испытаниях): Целевое ТС, перемещающееся с постоянной скоростью в одном и том же направлении по центру той полосы движения, в которой движется рассматриваемое ТС.
3.9 дорожная обстановка: Совокупность:
- подвижных и неподвижных целевых объектов, находящихся в зоне контроля СОЭТ, с учетом направления и скорости их движения (если применимо) относительно направления и скорости движения рассматриваемого ТС;
- погодных и сезонных условий, включающих время года, видимость и осадки;
- дорожных условий; тип покрытия: сухое, влажное, обводненное, обледеневшее, со снежным накатом, поврежденное, с дефектами, со слабой несущей способностью; угол уклона дороги и т.п.
3.10 зона контроля СОЭТ: Область пространства, находящаяся перед рассматриваемым ТС, форма и размеры которой определяются формой и размерами областей, контролируемых всеми компонентами обнаружения СОЭТ.
Примечание 1 - См. рисунок 2.
Примечание 2 - Суммарно зона контроля СОЭТ при включенном на рассматриваемом ТС указателе поворота складывается из основной зоны контроля 5 и дополнительной зоны контроля (6 или 7), выбираемой в зависимости от включения соответствующего указателя поворота РТС.
|

1 - рассматриваемое ТС; 2 - целевое ТС на полосе движения рассматриваемого ТС; 3 - ТС на соседней с рассматриваемым ТС полосе движения; 4 - зона контроля СОЭТ (серый фон); 5 - основная зона контроля СОЭТ (длинный пунктир); 6 - дополнительная (правая боковая) зона контроля при включенном на рассматриваемом ТС указателе правого поворота (короткий пунктир); 7 - дополнительная (левая боковая) зона контроля при включенном на рассматриваемом ТС указателе левого поворота (точечный пунктир); 8 - компоненты обнаружения (слева - видеокамера, справа - радар фронтальный); 9 - зона контроля видеокамеры
Рисунок 2 - Зоны контроля системы опережающего экстренного торможения
3.11 зона предупреждения СОЭТ: Участок основной или дополнительной зоны контроля СОЭТ, располагающийся на требуемом направлении движения рассматриваемого ТС, при нахождении в котором целевого объекта и при выполнении требований к предупреждению СОЭТ должна выдавать предупреждения.
Примечание - См. рисунок 3.
|

1 - рассматриваемое ТС; 2 - целевое ТС
Рисунок 3 - Зоны системы опережающего экстренного торможения
3.12 зона торможения СОЭТ: Участок зоны предупреждения, располагающийся на требуемом направлении движения рассматриваемого ТС, в начале которого СОЭТ должна задействовать тормозные механизмы рассматриваемого ТС, исходя из ВДС, рассчитанного аналитической подсистемой.
Примечание - См. рисунок 3.
3.13 адаптация системы; адаптация: Процесс настройки чувствительности системы измерения таким образом, чтобы ее показания соответствовали диапазону эталонных сигналов.
3.14 комплект: Комплект оборудования, обеспечивающий выполнение функции обнаружения и распознавания целевых объектов в зоне контроля СОЭТ, предупреждения о них водителя рассматриваемого ТС и включение функции опережающего экстренного торможения в случае, если водитель после получения предупреждения не предпринимает мер по изменению траектории рассматриваемого ТС или снижению его скорости.
3.15 компонент обнаружения; КО: Устройство (видеокамера(ы), радар, лидар или иное), позволяющее обнаруживать целевые объекты перед рассматриваемым ТС.
3.16
масса транспортного средства в снаряженном состоянии: Установленная изготовителем в эксплуатационной документации масса комплектного ТС с водителем без нагрузки и с наличием не менее 90% штатного запаса топлива. [ГОСТ 33997-2016, статья 2.30] |
3.17 механическое транспортное средство [2]: ТС, приводимое в движение двигателем.
3.18 мягкий объект: Объект, имитирующий ТС, получающий минимальные повреждения и наносящий минимальные повреждения рассматриваемому ТС в случае столкновения, представляющий ТС с точки зрения характеристик обнаружения, применимых в сенсорной системе испытываемой СОЭТ.
3.19 неисправность СОЭТ: Устойчивое состояние системы, характеризующееся невозможностью осуществления ее функций в полном объеме и продолжающееся до осуществления ремонтных или сервисных воздействий.
3.20 общее пространство: Область панели приборов или дисплея мультимедийной системы рассматриваемого ТС, в которой могут отражаться, но не совмещаться, не менее двух информационных функций (например, условных обозначений).
3.21 объект-пешеход: Объект, имитирующий пешехода, получающий минимальные повреждения и наносящий минимальные повреждения рассматриваемому ТС в случае столкновения, представляющий пешехода с точки зрения характеристик обнаружения, применимых в сенсорной системе испытываемой СОЭТ.
3.22 объект-транспортное средство: Объект, представляющий собой ТС.
3.23 опасность для движения [2]: Ситуация, возникшая в процессе дорожного движения, при которой продолжение движения в том же направлении и с той же скоростью создает угрозу возникновения дорожно-транспортного происшествия.
3.24 пиковый коэффициент торможения; ПКТ: Показатель сцепления рабочей поверхности колеса РТС с поверхностью дороги, измеряемый на основе максимального замедления катящегося колеса.
3.25 порожнее транспортное средство: ТС, имеющее снаряженную массу с дополнительной массой не более 125 кг. Эта дополнительная масса включает контрольно-измерительное оборудование и, возможно, второе лицо, находящееся на переднем сиденье и отвечающее за регистрацию результатов испытаний.
3.26 предупреждение о возможном столкновении: Предупреждение, которое СОЭТ направляет водителю при превышении заданного значения уровня риска столкновения для требуемого направления движения рассматриваемого ТС.
3.27 программа испытаний: Программа функциональных испытаний комплекта в составе ТС.
3.28
3.28 разрешенная максимальная масса: Ограничение максимальной массы ТС, установленное нормативными правовыми актами в зависимости от конструктивных особенностей ТС. [ГОСТ 33997-2016, статья 2.52] |
3.29 рассматриваемое транспортное средство; РТС: Механическое ТС, оснащенное СОЭТ и подлежащее испытаниям.
Примечание - Испытания РТС - в соответствии с приложением А.
3.30 самодиагностика: Встроенная функция СОЭТ, проверяющая СОЭТ на сбой или неисправность при включении/инициализации и во время функционирования системы.
3.31 сбой СОЭТ: Состояние системы, характеризующееся временной потерей ее работоспособности, продолжающейся до завершения объективного события, вызвавшего это состояние (например, помехи радару или его перекрытие; блик, воздействующий на видеокамеру), либо до перезагрузки системы (например, после выключения и включения зажигания), либо до действий водителя по устранению причин данного состояния.
3.32 система опережающего экстренного торможения; СОЭТ ("система"): Электронная система РТС, обладающая функциями обнаружения, распознавания и различения целевых объектов и предупреждения о них водителя РТС, соответствующая требованиям настоящего стандарта, способная автоматически выявлять риск столкновения спереди и приводить в действие тормозную систему РТС для снижения скорости с целью предупреждения столкновения или смягчения его последствий.
Примечание - СОЭТ подлежит испытаниям в соответствии с приложением А.
3.33 стационарное целевое транспортное средство (при испытаниях): Неподвижное целевое транспортное средство, установленное в направлении движения РТС в центре полосы его движения.
3.34 сухая дорога: Дорога, на которой номинальный ПКТ составляет 0,9.
3.35 тактильные сигналы: Предупреждающие сообщения о препятствии, передаваемые водителю РТС тактильным (осязательным) путем через вибрации рулевого колеса, сиденья водителя или педального узла, а также кратковременное автоматическое торможение.
3.36 тональные аудиосообщения: Предупреждающие аудиосообщения системы водителю РТС, выдаваемые посредством тональных звуковых сигналов, различающихся по тональности и частоте повторений.
Примечание - Тональные аудиосообщения должны соответствовать ГОСТ Р ИСО 15006.
3.37
тормозной путь: расстояние, пройденное ТС от начала до конца торможения. [ГОСТ 33997-2016, статья 2.73] |
3.38 транспортное средство; ТС [3]: устройство на колесном ходу категорий L, M, N, O, предназначенное для перевозки людей, грузов или оборудования, установленного на нем.
3.39 требуемое направление движения; ТНД: Запланированное водителем направление движения РТС, распознаваемое системой по заблаговременному включению соответствующего указателя поворота (в соответствии с [3], пункт 8.1), отсутствию такого включения, изменяемому и/или сохраняемому водителем РТС углу поворота рулевого колеса, а также положению селектора трансмиссии.
3.40 целевое транспортное средство; ЦТС: Находящееся в массовом производстве пассажирское ТС категории ![]() АА либо мягкий объект, находящийся в зоне контроля СОЭТ РТС.
АА либо мягкий объект, находящийся в зоне контроля СОЭТ РТС.
3.41 целевой объект; ЦО:
- при эксплуатации РТС: Пешеход, велосипедист, целевое транспортное средство (мотоцикл, легковой автомобиль, грузовой автомобиль), находящиеся в неподвижном состоянии или движущиеся, а также стационарные объекты, здания и сооружения, при их расположении в зоне контроля СОЭТ РТС;
- при испытаниях СОЭТ: Объект, участвующий в проведении испытаний в качестве цели для КО СОЭТ РТС.
3.42 шина: Проводная система передачи данных, установленная на РТС.
3.43 экстренное торможение: Процесс снижения скорости РТС с замедлением не менее 4 м/с, инициированный СОЭТ.
3.44 этап предупреждения о столкновении: Этап, непосредственно предшествующий этапу экстренного торможения, на котором СОЭТ предупреждает водителя РТС о риске столкновения спереди.
3.45 этап экстренного торможения: Этап, начинающийся в момент, когда СОЭТ передает запрос на торможение с замедлением не менее 4 м/с.
4 Обозначения и сокращения
В настоящем стандарте использованы следующие сокращения:
АИЛ | - аккредитованная испытательная лаборатория; |
БУ | - блок управления; |
ВК | - видеокамера; |
ДМС | - дисплей мультимедийной системы РТС; |
ДТП | - дорожно-транспортное происшествие; |
КП | - комбинация приборов РТС; |
ПО | - программное обеспечение; |
ЧМИ | - человеко-машинный интерфейс; |
ABS | - антиблокировочная тормозная система; |
ESC | - электронная система динамической стабилизации ТС. |
5 Условия эксплуатации
5.1 СОЭТ, установленная на РТС, должна сохранять работоспособность круглосуточно, ежедневно, в любое время года при использовании в следующих условиях:
а) при параметрах окружающей среды, соответствующих климатическому исполнению РТС по ГОСТ 15150, на которое она установлена;
б) на дорогах, соответствующих СП 34.13330.2012 в части дорог равнинной местности;
в) в песчано-пустынной местности при массовой концентрации пыли до 5 мг/м;
г) при атмосферных осадках: снег, дождь, ледяной дождь, туман, не ограничивающих условия фронтальной видимости;
д) при условиях фронтальной видимости не менее 200 м (только для ВК);
е) при сухом обтекателе радарных датчиков, свободном от загрязнений;
ж) допустимо снижение дальности обнаружения, а также технических и эксплуатационных характеристик, при несоблюдении условий в), г) и д);
и) при эксплуатационной скорости РТС категорий ![]() и
и ![]() в диапазоне от 10 до 60 км/ч в соответствии с [4], или категорий
в диапазоне от 10 до 60 км/ч в соответствии с [4], или категорий ![]() ,
, ![]() и
и ![]() ,
, ![]() в диапазоне от 15 км/ч до максимальной расчетной скорости РТС в соответствии с [5].
в диапазоне от 15 км/ч до максимальной расчетной скорости РТС в соответствии с [5].
5.2 Требования к механическим нагрузкам, колебаниям в вертикальной плоскости (только для радаров), амплитуда:
- не более 0,1 м в полосе частот от 0,1 до 50 Гц;
- не более 1/4 длины волны (не более 3 мм для частоты 24 ГГц, не более 1 мм для 77 ГГц) в диапазоне частот более 50 Гц.
Примечание 1 - При наличии датчика ускорений возможна компенсация колебаний или формирование предупреждения о необходимости снизить скорость.
Примечание 2 - При превышении указанных значений механических нагрузок допускается ограничение функциональности системы при эксплуатации.
5.3 Контрастность изображений, распознаваемых ЦО должна быть не менее 500:1 (только для ВК).
5.4 В ночное время при наличии ВК на РТС ЦО должны быть освещены ближним светом фар РТС.
6 Аппаратные интерфейсы системы
6.1 Требования к интеграции в ТС
СОЭТ должна осуществлять обмен информацией с другими устройствами и системами, подключенными к шине РТС, по согласованию между производителем СОЭТ и изготовителем РТС.
6.1.2 Передача видеоинформации между компонентами системы, а также между СОЭТ и РТС должна осуществляться по интерфейсу, согласованному производителем СОЭТ с изготовителем РТС.
6.2 Для корректной работы СОЭТ по согласованию ее производителя с производителем РТС может использовать:
- фронтальную видеокамеру и/или радар и/или лидар;
- электронный блок управления двигателем;
- электронный блок ABS/ESC;
- блок кузовной электроники;
- мультимедийную систему с ДМС и/или КП РТС с возможностью отображения визуальных сообщений в соответствии с 8.6;
- устройства, обеспечивающие подачу тактильных предупреждений (опционально) и аудиопредупреждений.
7 Требования к характеристикам системы опережающего экстренного торможения
7.1 Время готовности системы к работе с момента подачи питания должно составлять не более 20 с.
7.2 Вероятность правильного обнаружения ЦО должна составлять не менее 0,9. При этом вероятность ложного срабатывания должна быть такова, чтобы отношение числа ложных целей к общему числу обнаруженных объектов в среднем составляло не более 0,1.
7.3 Параметры зоны контроля ЦО:
- в поперечном направлении от РТС на уровне максимальной дальности - не менее 5 м.
- в продольном направлении от РТС - не менее 100 м.
7.4 СОЭТ должна обеспечивать распознавание ЦО при движении РТС со скоростями в соответствии с 5.1 и).
7.5 Установившееся замедление при экстренном торможении должно составлять:
- для РТС категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() - не менее 4 м/с
- не менее 4 м/с;
- для РТС категорий ![]() и
и ![]() - не менее 5 м/с
- не менее 5 м/с.
7.6 СОЭТ должна выводить на ДМС или КП РТС визуальные предупреждения.
7.7 СОЭТ должна включать в себя средства самодиагностики и сообщать водителю о своих сбоях и неисправностях.
7.8 Компоненты СОЭТ должны соответствовать степени защиты по ГОСТ 14254 в зависимости от места их установки на РТС.
7.9 Конструкция кабельных соединений не должна допускать их неправильной стыковки или самопроизвольного разъединения.
7.10 Конструкция и компоновка компонентов СОЭТ должны обеспечивать безопасность при монтаже, эксплуатации и замене.
7.11 Должно быть исключено самопроизвольное отключение СОЭТ при работе в условиях промышленных и атмосферных радиопомех.
7.12 СОЭТ должна быть работоспособна согласно ГОСТ 15150 в соответствии с климатическим исполнением РТС, на которое она установлена.
7.13 СОЭТ должна удовлетворять требованиям по устойчивости к кондуктивным помехам по цепям питания и управления в соответствии с ГОСТ 33991.
7.14 СОЭТ должна удовлетворять нормам 3-го класса по уровню излучаемых радиопомех в цепях питания в соответствии с ГОСТ Р 51318.25.
7.15 СОЭТ должна удовлетворять требованиям по устойчивости к электростатическому разряду в соответствии с ГОСТ Р 50607.
7.16 СОЭТ должна удовлетворять требованиям [6] по уровню излучаемых индустриальных радиопомех.
7.17 Сопротивление изоляции СОЭТ, измеренное в нормальных климатических условиях между соединениями вместе всеми контактами разъема и корпусом изделия, должно быть не менее 10 МОм.
7.18 Изоляция СОЭТ должна выдерживать без повреждений в течение 1 мин воздействия синусоидального переменного тока частотой 50 Гц с действующим значением испытательного напряжения 550 В.
7.19 СОЭТ должна удовлетворять требованиям [6] по устойчивости к внешнему электромагнитному полю.
7.20 СОЭТ должна удовлетворять требованиям 3-й степени эмиссии импульсных помех в цепи питания в соответствии с ГОСТ 33991.
7.21 СОЭТ должна удовлетворять требованиям по устойчивости к динамическим изменениям напряжения питания:
- при повышении напряжения питания до (18±0,2) В в течение 2 ч соответствовать функциональному классу А-С;
________________
Функциональный класс в соответствии с ГОСТ 33991.
- при повышении напряжения питания до (24±0,2) В в течение 5 мин соответствовать функциональному классу А-С;
- при воздействии напряжения обратной полярности (минус 14±0,2) В в течение (5±0,2) мин соответствовать функциональному классу А;
- после плавного снижения напряжения питания с 16 В до 0 В и последующего повышения от 0 В до 16 В со скоростью изменения напряжения (0,5±0,1) В/мин соответствовать функциональному классу А.
8 Общие технические требования
8.1 Общие положения
Любое ТС категорий M и N, оборудованное СОЭТ, должно отвечать требованиям эффективности, изложенным в разделе 8, и должно быть оснащено ESC в соответствии с требованиями эффективности, изложенными в приложении 13 к [7] и приложении 6 к [8].
ТС категорий ![]() и
и ![]() , оборудованные СОЭТ, должны отвечать требованиям Правил [8], а ТС категории
, оборудованные СОЭТ, должны отвечать требованиям Правил [8], а ТС категории ![]() - требованиям Правил [7].
- требованиям Правил [7].
8.2 Эксплуатационные требования
8.2.1 Система должна подавать водителю нижеследующий(е) сигнал(ы) предупреждения.
8.2.1.1 Предупреждение о возможном столкновении, когда СОЭТ выявляет риск столкновения с ТС категории M, N или O, которое движется с меньшей скоростью в той же полосе движения, замедлило свое движение вплоть до полной остановки либо является неподвижным и не было идентифицировано в качестве движущегося. Это предупреждение должно соответствовать предписаниям 8.6.1.
8.2.1.2 Предупреждения о сбое или неисправности в работе СОЭТ, препятствующих выполнению требований настоящего стандарта, должны соответствовать предписаниям 8.6.5 и 8.6.6. Самодиагностика СОЭТ должна выполняться, как минимум, при каждом включении зажигания РТС.
8.2.1.3 Если адаптация системы не была произведена по истечении 15 с суммарного времени движения на скорости свыше 10 км/ч, то водителю РТС сообщается информация об этом состоянии. Данная информация должна сохраняться до тех пор, пока не произойдет успешная адаптация системы.
8.2.1.4 При обнаружении отказа или неисправности компонентов СОЭТ должны подаваться предупредительные сигналы в соответствии с 8.6.
8.2.2 За предупреждением (предупреждениями), предусмотренным(и) в 8.2.1.1, с учетом 8.3.1-8.3.3, должен следовать этап экстренного торможения/замедления, описанный в 8.3.2.2, для недопущения столкновения либо смягчения его последствий. Испытания на соблюдение этих требований проводят в соответствии с приложением А.
8.2.3 Система должна функционировать, по меньшей мере, в тех случаях, когда скорость РТС находится в диапазоне, указанном в 5.1 и) при всех условиях загрузки РТС, за исключением тех случаев, когда она отключена в соответствии с 8.5.
8.2.4 СОЭТ должна предупреждать о ЦО на пути на прямых участках дороги и непрямолинейных участках с радиусом кривизны, большим или равным 500 м, для класса I, большим или равным 250 м для класса II и большим или равным 125 м для класса III. Выполнение данного требования должно быть продемонстрировано в ходе оценки, проведенной в соответствии с приложением А в отношении сценария, приведенного в А.12.
8.2.5 Экстренное торможение
С учетом положений 8.4.1 и 8.4.2 система должна обеспечивать экстренное торможение, описанное в 8.3.1.3 и 8.3.2.4, с целью недопущения столкновения либо смягчения его последствий.
8.2.6 Предотвращение ложного реагирования
Система должна быть сконструирована таким образом, чтобы сигналы предупреждения о возможном столкновении сводились к минимуму, и чтобы система не инициировала экстренное торможение в ситуациях, когда водитель не обнаруживает препятствия, угрожающего столкновением. Выполнение данного требования должно быть продемонстрировано в ходе оценки, проведенной в соответствии с приложением А в отношении сценариев, перечисленных в А.9, А.10 и А.11.
8.3 Требования к системам опережающего экстренного торможения
8.3.1 Сценарий столкновения рассматриваемого транспортного средства с целевым транспортным средством
8.3.1.1 Предупреждение о возможном столкновении
Если вероятность столкновения с ЦТС категории ![]() , движущимся в той же полосе движения с относительной скоростью, превышающей ту скорость, до достижения которой РТС может избежать столкновения, возможно рассчитать за 0,8 с до экстренного торможения, то предупреждение о возможном столкновении должно соответствовать предписаниям 8.6.1 и быть подано не позднее, чем за 0,8 с до начала экстренного торможения.
, движущимся в той же полосе движения с относительной скоростью, превышающей ту скорость, до достижения которой РТС может избежать столкновения, возможно рассчитать за 0,8 с до экстренного торможения, то предупреждение о возможном столкновении должно соответствовать предписаниям 8.6.1 и быть подано не позднее, чем за 0,8 с до начала экстренного торможения.
В случае, если вероятность столкновения невозможно рассчитать за 0,8 с до экстренного торможения, предупреждение о возможном столкновении должно выдаваться непосредственно после ее обнаружения.
Предупреждение о возможном столкновении может быть отменено, если условия, создающие угрозу столкновения, перестают существовать.
Испытания на соблюдение этих условий проводятся в соответствии с А.5 и А.6.
8.3.1.2 Скорость
Система должна функционировать, по меньшей мере, в тех случаях, когда относительная скорость находится в диапазоне от 10 до 60 км/ч, а также при всех условиях загрузки РТС, за исключением тех случаев, когда она отключена в соответствии с 8.5.
8.3.1.3 Снижение скорости путем запроса на применение тормоза
Когда система активна, она должна обеспечить снижение относительной скорости для РТС категорий ![]() и
и ![]() на момент возможного ДТП в соответствии с таблицами 1 и 2 при нижеперечисленных условиях:
на момент возможного ДТП в соответствии с таблицами 1 и 2 при нижеперечисленных условиях:
- при столкновениях с постоянно движущимися или неподвижными объектами;
- на сухих дорогах;
- в груженом и порожнем состояниях;
- при смещении продольных центральных плоскостей ТС на значения, указанные в таблице А.1;
- в условиях окружающего освещения в соответствии с А.2.5.
Эффективность, указанная в таблицах 1 и 2, не может быть полностью достигнута в условиях, отличающихся от вышеперечисленных. Однако, система не должна отключать или радикально изменять стратегию управления в других условиях. Выполнение данного требования должно быть продемонстрировано в соответствии с приложениями А и Б.
Таблица 1 - Максимальная относительная скорость при ударе для транспортных средств категории ![]()
Относительная | Максимальная относительная скорость при ударе, км/ч | |||
скорость, км/ч | ТС в неподвижном состоянии | Движущееся ТС | ||
Груженое | Порожнее | Груженое | Порожнее | |
10 | 0,00 | 0,00 | 0,00 | 0,00 |
15 | 0,00 | 0,00 | 0,00 | 0,00 |
20 | 0,00 | 0,00 | 0,00 | 0,00 |
25 | 0,00 | 0,00 | 0,00 | 0,00 |
30 | 0,00 | 0,00 | 0,00 | 0,00 |
35 | 0,00 | 0,00 | 0,00 | 0,00 |
40 | 0,00 | 0,00 | 0,00 | 0,00 |
42 | 10,00 | 0,00 | - | 0,00 |
45 | 15,00 | 15,00 | - | - |
50 | 25,00 | 25,00 | - | - |
55 | 30,00 | 30,00 | - | - |
60 | 35,00 | 35,00 | - | - |
Таблица 2 - Максимальная относительная скорость при ударе для транспортных средств категории ![]()
Относительная | Максимальная относительная скорость при ударе, км/ч | |||||||
скорость | ТС в неподвижном состоянии | Движущееся ТС | ||||||
Груженое | Порожнее | Груженое | Порожнее | |||||
|
|
|
|
|
|
|
| |
10 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
15 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
20 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
25 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
30 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
32 | 0,00 | 15,00 | 0,00 | 0,00 | 0,00 | - | 0,00 | 0,00 |
35 | 0,00 | 15,00 | 0,00 | 0,00 | 0,00 | - | 0,00 | 0,00 |
38 | 0,00 | 20,00 | 0,00 | 15,00 | 0,00 | - | 0,00 | 0,00 |
40 | 10,00 | 20,00 | 0,00 | 15,00 | - | - | 0,00 | - |
42 | 15,00 | 25,00 | 0,00 | 20,00 | - | - | 0,00 | - |
45 | 20,00 | 25,00 | 15,00 | 25,00 | - | - | - | - |
50 | 30,00 | 35,00 | 25,00 | 30,00 | - | - | - | - |
55 | 35,00 | 40,00 | 30,00 | 35,00 | - | - | - | - |
60 | 40,00 | 45,00 | 35,00 | 40,00 | - | - | - | - |
Примечание - | ||||||||
Снижение скорости должно быть продемонстрировано в соответствии с А.5 и А.6.
Испытания на соответствие требованиям к предупреждению и торможению для РТС категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() должны проводиться в соответствии с таблицей А.3.
должны проводиться в соответствии с таблицей А.3.
8.3.2 Сценарий столкновения рассматриваемого транспортного средства с пешеходом (только для транспортных средств категорий ![]() и
и ![]() )
)
8.3.2.1 Предупреждение о возможном столкновении
Когда СОЭТ обнаруживает возможность столкновения с пешеходом, пересекающим дорогу с постоянной скоростью (5±2) км/ч, подается предупреждение о возможном столкновении в соответствии с 8.6 не позднее начала экстренного торможения. Предупреждение о возможном столкновении может быть отменено, если условия, создающие угрозу столкновения, перестают существовать.
8.3.2.2 Экстренное торможение
Если система выявила риск неминуемого столкновения, то рабочей тормозной системе ТС должен передаваться запрос на торможение с замедлением не менее 5,0 м/с.
Экстренное торможение может быть отменено, если условия, создающие угрозу столкновения, перестают существовать.
Испытания на соблюдение этих условий проводятся в соответствии с А.7.
8.3.2.3 Скорость
При скорости РТС, находящейся в диапазоне от 20 до 60 км/ч, система должна обеспечивать достижение максимальной относительной скорости при ударе, не превышающей для РТС категорий ![]() и
и ![]() соответственно значений, приведенных в таблицах 3 и 4, для груженого и порожнего состояний загрузки РТС, за исключением тех случаев, когда она отключена в соответствии с 8.5.
соответственно значений, приведенных в таблицах 3 и 4, для груженого и порожнего состояний загрузки РТС, за исключением тех случаев, когда она отключена в соответствии с 8.5.
8.3.2.4 Снижение скорости путем запроса на применение тормоза
В активном состоянии система должна обеспечить достижение максимальной относительной скорости РТС и пешехода при ударе, как показано в таблицах 3 и 4, при нижеперечисленных условиях:
- при пересечении дороги пешеходами со скоростью не более 5 км/ч;
- на сухих дорогах;
- в груженом и порожнем состояниях;
- в условиях окружающего освещения не менее 2000 лк.
Эффективность, требуемая в таблицах 3 и 4, не может быть полностью достигнута в условиях, отличающихся от вышеперечисленных. Однако, система не должна отключать или радикально изменять стратегию управления в других условиях. Выполнение этого требования должно быть продемонстрировано в соответствии с приложением Б.
Таблица 3 - Максимальная относительная скорость при ударе для транспортных средств категории ![]()
Скорость движения РТС, км/ч | Максимальная относительная скорость при ударе, км/ч | |
В груженом состоянии | В порожнем состоянии | |
20 | 0,00 | 0,00 |
25 | 0,00 | 0,00 |
30 | 0,00 | 0,00 |
35 | 20,00 | 20,00 |
40 | 25,00 | 25,00 |
45 | 30,00 | 30,00 |
50 | 35,00 | 35,00 |
55 | 40,00 | 40,00 |
60 | 45,00 | 45,00 |
Снижение скорости должно быть продемонстрировано в соответствии с А.7.
Таблица 4 - Максимальная относительная скорость при ударе для транспортных средств категории ![]()
Скорость движения | Максимальная относительная скорость при ударе, км/ч | |||
РТС, км/ч | В груженом состоянии | В порожнем состоянии | ||
|
|
|
| |
20 | 0,00 | 0,00 | 0,00 | 0,00 |
25 | 0,00 | 10,00 | 0,00 | 0,00 |
30 | 0,00 | 15,00 | 0,00 | 15,00 |
35 | 20,00 | 25,00 | 20,00 | 20,00 |
40 | 25,00 | 30,00 | 25,00 | 25,00 |
45 | 30,00 | 35,00 | 30,00 | 30,00 |
50 | 35,00 | 40,00 | 35,00 | 35,00 |
55 | 40,00 | 45,00 | 40,00 | 45,00 |
60 | 45,00 | 50,00 | 45,00 | 50,00 |
Примечание - | ||||
8.3.3 Сценарий столкновения рассматриваемого транспортного средства с пешеходом (только для транспортных средств категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() )
)
Испытания на соответствие требованиям к предупреждению и торможению для РТС категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() должны проводиться в соответствии с таблицей А.3.
должны проводиться в соответствии с таблицей А.3.
8.3.4 Сценарий предупреждения и столкновения рассматриваемого транспортного средства с велосипедистом (только для транспортных средств категорий ![]() и
и ![]() )
)
Для предупреждения водителя РТС о возможности столкновения с велосипедистом применяют положения 8.3.2 с учетом следующих отличий:
- скорость движения велосипедиста: от 10 до 15 км/ч;
- требования к обнаружению и различению велосипедистов и пешеходов - в соответствии с ГОСТ Р 58836;
- испытания на соответствие требованиям к предупреждению и торможению в случае ЦО - велосипедиста должны проводиться в соответствии с А.7.
8.4 Вмешательство водителя
8.4.1 СОЭТ должна обеспечивать средства для прерывания водителем сигнала предупреждения о возможном столкновении и экстренного торможения.
8.4.2 Вмешательство водителя может быть инициировано любым осознанным действием: изменением направления движения и/или торможением, свидетельствующим о том, что водитель осознает наличие чрезвычайной ситуации.
8.5 Принудительное отключение системы опережающего экстренного торможения
8.5.1 Если СОЭТ отключена водителем РТС, например, в таких ситуациях, как использование в условиях бездорожья, буксировка, работа на динамометрическом стенде, необнаруживаемая системой разрегулированность датчиков, то должны надлежащим образом выполняться следующие условия:
- работа СОЭТ должна автоматически восстанавливаться при инициации каждого нового цикла зажигания;
- устройство управления СОЭТ должно быть сконструировано таким образом, чтобы отключение системы ручным способом производилось с помощью простой односложной манипуляции;
- орган управления СОЭТ устанавливают таким образом, чтобы обеспечивалось соблюдение соответствующих требований [9].
8.5.2 Негаснущий визуальный сигнал предупреждения должен информировать водителя о том, что функция СОЭТ отключена водителем. Для этой цели должен быть использован желтый предупреждающий сигнал, указанный для данной функции в 8.6.
8.5.3 Изготовитель РТС должен представить АИЛ перечень ситуаций и соответствующих критериев, при которых функция СОЭТ может отключаться; перечень должен быть включен в протокол испытания в качестве приложения.
8.6 Общее описание человеко-машинного интерфейса системы опережающего экстренного столкновения
8.6.1 СОЭТ передает водителю РТС информацию о режиме работы и статусе системы с помощью световых индикаторов на КП и/или ДМС РТС. В дополнение к обязательным визуальным сообщениям и тональным аудиосообщениям могут быть предусмотрены голосовые аудиосообщения, а также тактильные сигналы. Выбор сообщения для каждого предупреждения осуществляется в соответствии с таблицей 5 и таблицей 6 (опционально).
Обязательная визуальная индикация сообщений о статусе и состоянии предупреждения СОЭТ представлена в таблице 5. Опциональная визуальная индикация сообщений, которые могут выдаваться вместо индикации по п.4 таблицы 5 (на КП или ДМС РТС) о состоянии предупреждения СОЭТ, представлена в таблице 6. Инструкция по эксплуатации РТС, оснащенного СОЭТ, должна включать таблицу 5 и таблицу 6 (если применимо).
8.6.2 Предупреждение о возможном столкновении, упомянутое в 8.2.1.1, должно подаваться водителю при помощи не менее двух из указанных ниже сигналов: звукового, тактильного или визуального.
Время срабатывания для сигналов предупреждения должно быть таким, чтобы они, с одной стороны, позволяли водителю прореагировать на предупреждение и установить контроль за ситуацией, а с другой - чтобы они не создавали для водителя неудобств в виде излишне заблаговременной или слишком частой подачи сигналов. Испытания на выполнение этих условий проводятся в соответствии с приложением А.
8.6.3 Описание сигналов предупреждения и последовательности подачи сигналов предупреждения о столкновении водителю передается изготовителем ТС в АИЛ и отражается в протоколе испытания.
8.6.4 В случае использования для предупреждения о столкновении визуального сигнала он должен соответствовать п.5 таблицы 5 и таблице 6 (опционально).
8.6.5 Предупреждение о сбое СОЭТ, упомянутое в 8.2.1.2, возникшем, например из-за неблагоприятных погодных условий, должно подаваться визуальным сигналом, соответствующим п.3а таблицы 5.
8.6.6 Предупреждение о неисправности СОЭТ, упомянутое в 8.2.1.2, должно подаваться постоянным визуальным сигналом, соответствующим п.3b таблицы 5.
Таблица 5 - Базовая (минимальная) визуальная индикация сообщений о статусе и состоянии предупреждения системы опережающего экстренного торможения
________________
Использованы символы по ГОСТ Р ИСО 15008 и [10]*.
* Поз. [10], [11] см. раздел Библиография, здесь и далее по тексту. - .
Описание | Индикация | Описание индикации | Текстовое Сообщение |
| |||
1 СОЭТ включена (индикация отображается только на время самодиагностики приборов) |
| Не требуется | |
2 СОЭТ принудительно отключена водителем РТС |
| Красные символы "OFF" на пиктограмме функции | "СОЭТ отключена водителем" |
3a СОЭТ неактивна: |
| Желтая заливка символов пиктограммы функции, | "Сбой СОЭТ" (отображается до выключения зажигания) |
4a СОЭТ активна и находится в состоянии предупреждения (ЦО препятствует ТНД РТС с неизменной скоростью) (пульсирование индикации) |
| "Впереди (справа/слева) пешеход (велосипедист/ | |


Таблица 6 - Опциональная визуальная индикация сообщений п.4 таблицы 5 о состоянии предупреждения системы опережающего экстренного торможения
Описание | Индикация для ТС категорий М | Индикация для ТС категорий N | Текстовое сообщение ДМС/КП РТС |
4.1 СОЭТ активна и находится в состоянии предупреждения, ЦО спереди справа препятствует ТНД РТС |
|
| "Впереди справа пешеход (велосипедист/мотоциклист/ |
4.2 СОЭТ активна и находится в состоянии предупреждения, ЦО спереди слева препятствует ТНД РТС |
|
| "Впереди слева пешеход (велосипедист/мотоциклист/ |
4.3 СОЭТ активна и находится в состоянии предупреждения, ЦО спереди по центру препятствует ТНД РТС |
|
| "Впереди пешеход (велосипедист/мотоциклист/ |
4.4 СОЭТ активна и находится в состоянии предупреждения, ЦО обнаружен, но не распознан |
|
| "Объект впереди (справа, слева) не распознан" |








8.6.7 Визуальные сигналы предупреждения СОЭТ должны подаваться в процессе движения РТС, а также в положении диагностики систем РТС. Это требование не относится к предупреждающим сигналам, подаваемым в общем пространстве.
8.6.8 Визуальные сигналы предупреждения должны быть видимыми даже в дневное время; удовлетворительное состояние сигналов должно без труда контролироваться водителем с водительского места РТС.
8.7 Положения о периодическом техническом осмотре
8.7.1 В ходе периодического технического осмотра должна обеспечиваться возможность подтверждения правильного функционального статуса СОЭТ путем наблюдения за статусом сигнала предупреждения о сбое или неисправности после включения зажигания и проверки всех световых индикаторов.
Если сигнал предупреждения о сбое или неисправности СОЭТ подается в общем пространстве, то перед проверкой этого статуса должна быть подтверждена работоспособность общего пространства.
8.7.2 Во время официального утверждения типа ТС в конфиденциальном порядке должны указываться средства защиты от простого несанкционированного изменения характера функционирования сигнала предупреждения о сбое или неисправности СОЭТ, выбранного изготовителем.
Данное требование о защите считается выполненным, если имеется второстепенное средство проверки статуса надлежащего функционирования СОЭТ.
8.8 Функции системы опережающего экстренного торможения
СОЭТ должна осуществлять, как минимум, функции, указанные на рисунке 4.
|

Рисунок 4 - Функции системы опережающего экстренного торможения
8.9 Состояния и переходы системы опережающего экстренного торможения
СОЭТ должна обладать состояниями, соответствующими диаграмме состояний, представленной на рисунке 5.
СОЭТ должна иметь выходы на шину РТС для передачи информации об обнаруженных ЦО и статусе системы другим системам ТС.
8.9.1 Выключенное состояние СОЭТ
СОЭТ может быть отключена в результате возникшей неисправности по результатам самодиагностики, либо принудительно водителем РТС при условиях, описанных в 8.5.
8.9.2 Неактивное состояние СОЭТ
При включении зажигания РТС происходит переход СОЭТ в неактивное состояние. В неактивном состоянии СОЭТ не должна предупреждать водителя. Это состояние может быть деактивированным состоянием (после обнаружения сбоя) или состоянием готовности. В неактивном состоянии готовности система должна осуществлять подготовку системы к работе, осуществлять самодиагностику и диагностику систем и параметров РТС, необходимых для ее работы, а также осуществлять контроль выполнения критериев активации (см. 8.8.3).
Нормальные состояния системы - включенное, неактивное состояние готовности или активное состояние. Если текущее состояние системы отличается от нормального, то водитель должен быть проинформирован об этом, как минимум, световым индикатором с соответствующей пиктограммой по пп.1-3 таблицы 5, либо сообщением(ями) ЧМИ.
|
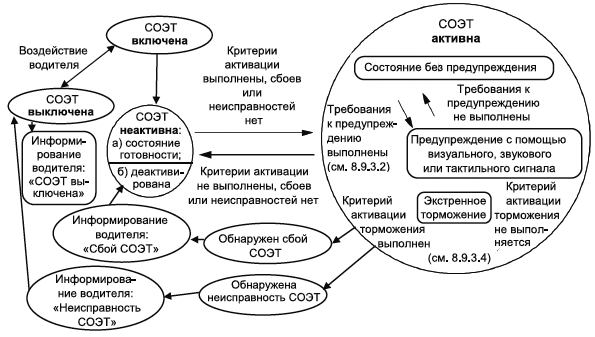
Рисунок 5 - Диаграмма состояний и переходов СОЭТ
8.9.3 Активное состояние СОЭТ
В активном состоянии СОЭТ должна осуществлять мониторинг дорожной обстановки, обнаруживать ЦО в зоне контроля, при выполнении требований к предупреждению (см. 8.9.3.2) - предупреждать водителя о препятствиях, создаваемых ими для ТНД РТС, а при отсутствии его реакции - обусловленно перейти в состояние экстренного торможения (см. 8.9.3.4).
8.9.3.1 Состояние без предупреждения
В состоянии без предупреждения СОЭТ активна, должна осуществлять мониторинг дорожной обстановки, обнаруживать ЦО в зоне контроля и осуществлять контроль выполнения требований к предупреждению.
8.9.3.2 Состояние предупреждения
В состоянии предупреждения СОЭТ активна, должна информировать водителя РТС с помощью визуальных, звуковых и тактильных сигналов об обнаруженных ЦО, для которых выполняются требования к предупреждению, и осуществлять контроль выполнения критерия активации экстренного торможения (см. 8.9.3.4).
Требования к предупреждению выполняются, если:
а) СОЭТ выявила превышение водителем РТС скорости, необходимой для исключения вероятности ДТП с ЦО, находящимся в зоне предупреждения на ТНД;
б) СОЭТ выявила намерение или действие водителя РТС по движению в направлении, способном вызвать опасность для движения, связанную с обнаруженным(и) в зоне предупреждения ЦО, и не выявила действий водителя по изменению скорости или направления движения.
8.9.3.3 Приоритетность сообщений в состоянии предупреждения
При одновременном обнаружении нескольких ЦО в зоне контроля аналитическая подсистема СОЭТ должна классифицировать данные объекты по приоритетности. Предупреждение должно выдаваться водителю РТС о том ЦО, ВДС с которым, согласно расчету аналитической подсистемы, меньше.
При обнаружении нескольких ЦО с одинаковой приоритетностью система должна выдавать соответствующие предупреждения о них в замкнутом цикле с минимальной длительностью отображения одного сообщения не менее 2 с вплоть до их исчезновения из зоны предупреждения.
8.9.3.4 Состояние экстренного торможения
При выполнении критерия активации торможения СОЭТ воздействует на органы управления замедлением РТС (вход тормозной системы) вплоть до остановки РТС. Критерий активации торможения выполняется, если СОЭТ выявила ЦО, находящийся в зоне торможения, расстояние до которого уменьшается, предупредила о нем водителя, но он не предпринял действий по снижению скорости или изменению направления движения РТС в течение времени, необходимого на реакцию водителя (0,8 с).
8.9.4 Критерии активации СОЭТ
При активации СОЭТ должна перейти из неактивного состояния в активное состояние. Несколько критериев активации могут использоваться одновременно. Потенциальные критерии активации включают, но не ограничиваются следующими:
- система может быть активна непрерывно (при включенном зажигании РТС и отсутствии сбоев и неисправностей);
- активация СОЭТ может осуществляться выявлением в зоне предупреждения ЦО: легкового или грузового ТС, мотоциклиста, велосипедиста, пешехода или стационарного объекта;
- СОЭТ может быть активирована при включении указателя поворота или поворотом руля РТС, если перед этим в неактивном состоянии готовности СОЭТ обнаружила ЦО, препятствующий(е) движению РТС в ТНД;
- СОЭТ может быть активирована скоростью РТС, если перед этим был(и) обнаружен(ы) ЦО, препятствующий(е) движению РТС с текущей скоростью в ТНД.
8.10 Обобщенный алгоритм действий системы опережающего экстренного торможения
8.10.1 Если ЦТС присутствует в зоне контроля, то СОЭТ должна измерять расстояние между ним и РТС (см. рисунок 3), но не должна предупреждать водителя РТС. В этой зоне ЦТС должно быть обнаружено в боковой области, по меньшей мере, на ширине РТС, плюс 0,5 м влево и вправо от нее (на ширине зоны контроля).
Если ЦТС присутствует в зоне предупреждения (см. рисунок 3), то СОЭТ должна обнаруживать его присутствие, определять скорость ЦТС и предупреждать водителя РТС при превышении скорости РТС скорости ЦТС.
Если ЦТС присутствует в зоне торможения, и расстояние до него уменьшается, а водитель РТС, получивший предупреждение, не задействовал рабочую тормозную систему, то СОЭТ должна применить автоматическое экстренное торможение.
8.10.2 Минимально необходимый перечень функций СОЭТ приведен ниже:
1) Обнаружение ЦО в зоне контроля.
2) При выполнении критериев активации и отсутствии сбоев или неисправностей - перейти в активное состояние.
3) Различение ЦО, определение их расположения, направлений движения и скорости (построение и анализ дорожной обстановки в режиме реального времени).
4) При выполнении требований к предупреждению (см. 8.9.3.2) - информирование водителя РТС об обнаруженном ЦО и выдача предупреждения в соответствии с таблицей 5 и таблицей 6 (опционально). Система должна разделять и выдавать предупреждения о ЦО в соответствии с их приоритетностью (ВДС для каждого ЦО) (см. 8.9.3.3).
5) В случае, если обнаруженный ЦО не распознан (опционально) - оповещение об этом водителя в соответствии с 4.4 таблицы 6.
6) При выполнении критерия активации торможения (см. 8.9.3.4) - воздействие на вход рабочей тормозной системы РТС до полной остановки РТС с индикацией по п.4b таблицы 5.
7) При возникновении сбоя или неисправности СОЭТ - оповещение об этом водителя РТС соответственно по п.3a или п.3b таблицы 5 и переход соответственно в неактивное деактивированное состояние или в выключенное состояние.
Приложение А
(обязательное)
Общие требования к проведению испытаний системы опережающего экстренного торможения
А.1 Общие сведения о методике
Настоящая методика определяет условия, цели, объем проведения испытаний и состояние РТС при испытаниях СОЭТ.
А.2 Условия проведения испытания
А.2.1 Испытание проводят на гладкой, сухой, бетонной или асфальтовой поверхности, обеспечивающей оптимальное сцепление.
А.2.1.1 Испытательная поверхность дорожного покрытия должна обладать номинальным ПКТ 0,9, если не оговорено иное, при измерении с использованием метода определения значения коэффициента ![]() , указанного в Правилах [8].
, указанного в Правилах [8].
А.2.1.2 Испытательная поверхность должна иметь равномерный уклон от 0% до 1%.
А.2.2 Температура окружающей среды должна составлять от 0°С до 45°С.
А.2.3 Видимость по горизонтали должна быть такой, чтобы за РТС можно было наблюдать в течение всего испытания.
А.2.4 Естественное окружающее освещение должно быть однородным в зоне испытаний и превышать 1000 лк в случае сценария столкновения РТС с ЦТС, предусмотренного в 8.3.1, и 2000 лк в случае сценария столкновения РТС с пешеходом, предусмотренного в 8.3.2. Не допускается проведение испытаний при движении в направлении солнца или под малым углом от него.
А.3 Состояние транспортного средства
А.3.1 РТС подвергают испытаниям, по меньшей мере, в порожнем и груженом состояниях. Распределение нагрузки должно соответствовать рекомендациям изготовителя. После начала процедуры испытания изменение массы РТС не допускается.
А.3.2 Подготовка перед испытанием
А.3.2.1 По требованию изготовителя РТС
Для адаптации системы датчиков РТС может потребоваться проехать не более 100 км по городским и сельским дорогам в сочетании с другой дорожной и придорожной инфраструктурой. Перед началом испытания РТС может подвергнуться последовательному приведению тормоза в действие, чтобы убедиться в том, что рабочая тормозная система находится в оптимальном рабочем состоянии.
А.3.2.2 Подробная информация о стратегии подготовки РТС перед испытанием, запрошенная изготовителем РТС, содержится в документации об официальном утверждении типа РТС.
А.4 Объекты, используемые в ходе испытания
А.4.1 Объект, используемый в ходе испытания на обнаружение ЦТС, должен представлять собой мягкий объект, соответствующий легковому автомобилю категории ![]() АА массового производства с точки зрения его характеристик обнаружения
АА массового производства с точки зрения его характеристик обнаружения, применимых в сенсорной системе испытываемой СОЭТ. Контрольной точкой для определения местоположения ЦТС должна быть наиболее удаленная в заднем направлении точка на осевой линии ТС.
________________
Характеристики обнаружения мягкого объекта должны быть согласованы АИЛ с изготовителем ТС в качестве эквивалентных характеристикам легкового автомобиля категории
![]() АА.
АА.
А.4.2 Объект, используемый в ходе испытания на обнаружение пешехода, должен представлять собой объект - пешеход, соответствующий [11].
А.4.3 Подробная информация о средствах, позволяющих конкретно идентифицировать и воспроизводить объект (объекты), должна быть указана в документации, касающейся официального утверждения типа ТС.
А.5 Испытание на предупреждение и торможение в случае стационарного объекта - ЦТС
А.5.1 РТС приближается к стационарной цели по прямой линии по крайней мере до момента, наступающего за 2 с до начала функционального этапа испытания. Значения смещения РТС по осевой линии ЦТС в зависимости от категории РТС приведены в таблице А.1.
Таблица А.1 - Значения смещения рассматриваемого транспортного средства по осевой линии целевого транспортного средства в зависимости от категории рассматриваемого транспортного средства
Категория РТС | Смещение РТС по осевой линии ЦТС, м (не более): |
| 0,5 |
| 0,2 |
Постоянные скорости РТС и расстояния между ним и ЦТС в момент начала функционального этапа испытаний в зависимости от категории РТС приведены в таблице А.2.
Таблица А.2 - Значения постоянной скорости рассматриваемого транспортного средства и расстояния между рассматриваемым транспортным средством и целевым транспортным средством в зависимости от категории рассматриваемого транспортного средства в момент начала функционального этапа испытаний
Категория РТС | Скорость движения РТС, км/ч | Расстояние между РТС и ЦТС |
|
| Соответствует ВДС=4 с |
| 80±2 | 120 м |
* Если это будет сочтено оправданным, АИЛ может испытывать любые другие значения скорости РТС в пределах диапазона скоростей, указанного в 8.3.2.3. | ||
С момента начала функционального этапа до момента столкновения не производится никакой корректировки управления РТС водителем, помимо незначительной корректировки рулевого управления во избежание возможного заноса.
А.5.2 Время срабатывания для режимов предупреждения о столкновении, упомянутое в 8.6.1, для РТС категорий ![]() и
и ![]() должно соответствовать положениям 8.3.1.1, а для РТС категорий
должно соответствовать положениям 8.3.1.1, а для РТС категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() - следующим требованиям.
- следующим требованиям.
А.5.2.1 Должен обеспечиваться, по меньшей мере, один режим предупреждения не позднее, чем это указано в графе В таблицы А.3.
В случае РТС, указанных в строке 1 таблицы А.3, предупреждение должно быть тактильным или звуковым.
В случае РТС, указанных в строке 2 таблицы А.3, предупреждение должно быть тактильным, звуковым или визуальным.
А.5.2.2 Должны обеспечиваться, по меньшей мере, два режима предупреждения не позднее, чем это указано в графе C таблицы А.3.
А.5.2.3 Любое снижение скорости на этапе предупреждения не должно превышать значения 15 км/ч либо 30% от общего снижения скорости РТС в зависимости от того, какое из этих значений выше.
А.5.3 За этапом предупреждения о столкновении следует этап экстренного торможения.
А.5.3.1 Общее снижение скорости РТС в момент столкновения со стационарной целью не должно быть меньшим, чем указанное в графах 2 и 3 таблицы 1 - для ТС категории ![]() , или чем указанное в графах 2-5 таблицы 2 - для ТС категории
, или чем указанное в графах 2-5 таблицы 2 - для ТС категории ![]() .
.
А.5.3.2 Этап экстренного торможения не должен начинаться до того момента, пока ВДС не составит 3,0 с.
Соответствие этим требованиям проверяют посредством практических измерений в ходе испытания либо при помощи документации, представленной изготовителем РТС, по договоренности между АИЛ и изготовителем РТС.
А.6 Испытание на предупреждение и торможение в случае движущегося объекта - ЦТС
А.6.1 РТС и движущееся ЦТС перемещаются по прямой линии в одном направлении до момента, наступающего за 2 с до начала функционального этапа испытания, при этом смещение РТС по осевой линии должно соответствовать таблице А.1.
Постоянные скорости РТС, ЦТС и расстояния между РТС и ЦТС в момент начала функционального этапа испытаний в зависимости от категории РТС указаны в таблице А.4.
Таблица А.3 - Требования к испытаниям на предупреждение и торможение: значение для прохождения/непрохождения испытаний для рассматриваемых транспортных средств категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]()
A | B | C | D | E | F | G | H | Строка |
Стационарная цель | Движущаяся цель | |||||||
Время срабатывания для режимов предупреждения, с | Сни- | Время срабатывания для режимов предупреждения, с | Сни- | Задан- | ||||
По меньшей мере, 1 (см. А.5.2.1) | По меньшей мере, 2 (см. А.5.2.2) | сти | По меньшей мере, 1 (см. А.6.2.1) | По меньшей мере, 2 (см. А.6.2.2) | сти | рость | ||
| Не позднее 1,4 перед началом этапа экстренного торможения | Не позднее 0,8 перед началом этапа экстренного торможения | Не менее 20 км/ч | Не позднее 1,4 перед началом этапа экстренного торможения | Не позднее 0,8 перед началом этапа экстренного торможения | Без | (12±2) км/ч | 1 |
| Не позднее 0,8 перед началом этапа экстренного торможения | Перед началом этапа экстренного тормо- | Не менее 10 км/ч | Не позднее 0,8 перед началом этапа экстренного торможения | Перед началом этапа экстренного тормо- | Без | (67±2) | 2 |
| ||||||||
Таблица А.4 - Значения постоянной скорости рассматриваемого транспортного средства, целевого транспортного средства и расстояния между рассматриваемым транспортным средством и целевым транспортным средством в зависимости от категории рассматриваемого транспортного средства в момент начала функционального этапа испытаний
Категория РТС | Скорость движения РТС, км/ч | Скорость движения ЦТС, км/ч | Расстояние между РТС и ЦТС |
|
|
| Соответствует ВДС=4 с |
| 80±2 | См. графу Н таблицы А.3 | 120 м |
* Если это будет сочтено оправданным, АИЛ может испытывать любые другие значения скорости РТС в пределах диапазона скоростей, указанного в 8.3.2.3. | |||
С момента начала функционального этапа испытания до того момента, когда РТС разовьет скорость, равную скорости ЦТС, водитель не должен проводить никаких управляющих воздействий, помимо незначительной корректировки рулевого управления во избежание возможного заноса.
А.6.2 Время срабатывания для режимов предупреждения о столкновении, упомянутое в 8.6.1, должно соответствовать для РТС категорий ![]() ,
, ![]() - 8.3.1.1, а категорий
- 8.3.1.1, а категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() - следующим требованиям:
- следующим требованиям:
А.6.2.1 Должен обеспечиваться, по меньшей мере, один тактильный или звуковой режим предупреждения не позднее, чем это указано в графе Е таблицы А.3.
А.6.2.2 Должны обеспечиваться, по меньшей мере, два режима предупреждения не позднее, чем это указано в графе F таблицы А.3.
А.6.2.3 Любое снижение скорости на этапе предупреждения не должно превышать значения 15 км/ч либо 30% от общего снижения скорости РТС в зависимости от того, какое из этих значений выше.
А.6.3 В результате применения экстренного торможения РТС не должно столкнуться с ЦТС.
А.6.4 Этап экстренного торможения не должен начинаться до того момента, пока ВДС не составит 3,0 с.
Соответствие этим требованиям проверяют посредством практических измерений в ходе испытания либо при помощи документации, представленной изготовителем РТС, по договоренности между АИЛ и изготовителем РТС.
А.7 Испытание на предупреждение и торможение в случае объекта - пешехода
А.7.1 РТС приближается к точке удара объекта - пешехода по прямой линии, по меньшей мере до момента, наступающего за 2 с до начала функционального этапа испытания, причем смещение РТС по осевой линии точки удара должно составлять не более 0,1 м.
Функциональный этап испытания начинается в то время, когда РТС движется с постоянной скоростью и находится от точки столкновения на расстоянии, указанном в таблице А.5.
Объект - пешеход движется по прямой линии, перпендикулярной к направлению движения РТС, с постоянной скоростью (5±0,2) км/ч, с момента не ранее начала функционального этапа испытания. Положение объекта - пешехода координируется с РТС таким образом, чтобы точка удара объекта - пешехода о переднюю часть РТС находилась на продольной осевой линии РТС с допуском не более 0,1 м, если РТС будет продолжать двигаться на предписанной испытательной скорости на всем протяжении функционального этапа испытания без замедления.
Постоянные скорости РТС и расстояния между ним и объектом - пешеходом в момент начала функционального этапа испытаний в зависимости от категории РТС указаны в таблице А.5.
Таблица А.5 - Значения постоянной скорости рассматриваемого транспортного средства и расстояния между рассматриваемым транспортным средством и объектом - пешеходом в зависимости от категории рассматриваемого транспортного средства в момент начала функционального этапа испытаний
Категория РТС | Скорость движения РТС, км/ч | Расстояние между РТС и объектом-пешеходом |
|
| Соответствует ВДС=4 с |
| 80±2 | 120 м |
* Если это будет сочтено оправданным, АИЛ может испытывать любые другие значения скорости РТС в пределах диапазона скоростей, указанного в 8.3.2.3 и 8.3.2.4. | ||
С момента начала функционального этапа испытания до того момента, когда РТС не избежит столкновения или пока РТС не пройдет точку удара объекта - пешехода, не проводят никаких управляющих воздействий, помимо незначительной корректировки рулевого управления во избежание возможного заноса.
Испытание, описанное выше, проводят с использованием определенного в А.4.2 объекта - пешехода в виде манекена - пешехода - ребенка в возрасте шести лет.
А.7.2 Время срабатывания для режимов предупреждения о возможном столкновении, упомянутое в 8.6.1, должно соответствовать положениям 8.3.2.1.
А.8 Испытание на выявление сбоя
А.8.1 При испытании производят имитацию сбоя в работе электрооборудования, например посредством отсоединения источника тока от любого элемента СОЭТ либо разъединения электрической схемы между элементами СОЭТ. При имитации сбоя СОЭТ не должны разъединяться электрические соединения сигнала предупреждения водителя, упомянутого в 8.4.
А.8.2 Сигнал предупреждения о сбое, упомянутый в 8.6.4, должен включаться и оставаться включенным в течение не более 10 с после того, как скорость движения РТС превысит 15 км/ч, и должен вновь подаваться сразу же после последующего цикла зажигания "выключено-включено" на неподвижном РТС до тех пор, пока сохраняется имитируемый сбой.
А.9 Испытание на ложное реагирование (объект - транспортное средство)
А.9.1 Два неподвижных ЦТС категории ![]() AA устанавливают:
AA устанавливают:
а) таким образом, чтобы они находились в том же направлении движения, что и РТС;
б) на расстоянии 4,5 м друг от друга;
________________
Исходная точка каждого неподвижного ЦТС, необходимая для определения расстояния между двумя неподвижными ЦТС, определяется в соответствии с ГОСТ 22748-77.
в) с выравниванием задних частей каждого ЦТС по одной линии.
А.9.2 РТС категорий ![]() ,
, ![]() ,
, ![]() ,
, ![]() должны преодолеть расстояние не менее 60 м на постоянной скорости (50±2) км/ч, а РТС категории
должны преодолеть расстояние не менее 60 м на постоянной скорости (50±2) км/ч, а РТС категории ![]() или
или ![]() - на постоянной скорости в соответствии с таблицами 2 и 3 соответственно для прохождения по центру между двумя неподвижными ЦТС.
- на постоянной скорости в соответствии с таблицами 2 и 3 соответственно для прохождения по центру между двумя неподвижными ЦТС.
В ходе этого испытания на РТС не проводят никаких управляющих воздействий, помимо незначительной корректировки рулевого управления во избежание возможного заноса.
А.9.3 СОЭТ не должна подавать сигнал предупреждения о столкновении и не должна инициировать экстренное торможение.
А.10 Испытание на ложное реагирование (объект-пешеход)
А.10.1 Объект-пешеход, описанный в А.4.2, должен быть установлен:
а) таким образом, чтобы он располагался в направлении движения РТС;
б) на расстоянии 1 м от стороны РТС, находящейся ближе всего к объекту-пешеходу, в сторону по направлению движения.
А.10.2 РТС должно преодолеть по прямой линии расстояние не менее 60 м на постоянной скорости в диапазоне скоростей, указанном в таблице 1 для прохождения неподвижного объекта-пешехода.
В ходе этого испытания не проводят никакой корректировки направления движения РТС, помимо незначительных корректирующих воздействий на рулевое управление во избежание возможного заноса.
А.10.3 СОЭТ не должна подавать сигнал предупреждения о столкновении и не должна инициировать этап экстренного торможения.
А.11 Испытание на ложное реагирование (объект сверху)
А.11.1 Испытание должно выполняться динамически, как показано на рисунке А.1.
На высоте 4,5 м от дорожного покрытия устанавливается цель для испытаний, которая может привести к формированию ложного предупреждения. Цель для испытаний должна представлять бетонный мост или располагаемый сверху дорожный знак. РТС приближается к цели испытаний и проходит под ней.
|
1 - цель испытаний; ![]() 4,5 м
4,5 м
Рисунок А.1 - Испытание на ложное реагирование (объект сверху)
А.11.2 СОЭТ не должна подавать сигнал предупреждения о столкновении и не должна инициировать этап экстренного торможения.
А.12 Испытание способности распознавания в поперечном направлении на непрямолинейном участке дороги
А.12.1 Испытание на соответствие требованиям 8.2.4 проводят на окружности или достаточной части окружности с радиусом 500 м или менее в случае класса I, с радиусом 250 м или менее в случае класса II и с радиусом 125 м или менее в случае класса III. Испытание должно проводиться динамически. РТС и ЦТС движутся по одной и той же полосе с одной и той же скоростью и на расстоянии друг от друга, которое не вызывает предупреждения. Скорость транспортных средств в начале испытания рассчитывается следующим образом
________________
В данном пункте классификация автомобильных дорог приведена в соответствии с ГОСТ Р 52398.
![]() м/с,
м/с,
где ![]() 2,0 м/с
2,0 м/с для класса I,
![]() 2,3 м/с
2,3 м/с для классов II и III.
Движущееся впереди ТС движется по внешней полосе рядом с ЦТС (см. рисунок А.2).
|

1 - рассматриваемое ТС; 2 - движущееся впереди ТС; 3 - ЦТС
Рисунок А.2 - Испытание способности обнаружения целевого транспортного средства на непрямолинейном испытательном треке
Через несколько секунд движущееся впереди ТС снижает скорость до значения, которое существенно ниже, чем скорость РТС и ЦТС. Во время снижения скорости движущимся впереди ТС СОЭТ не должна выдавать предупреждения. Через несколько секунд ЦТС снижает скорость до значения, достаточно низкого для того, чтобы СОЭТ выдала предупреждение о вероятности столкновения.
А.12.2 СОЭТ должна выдать сигнал предупреждения о столкновении.
Приложение Б
(обязательное)
Специальные предписания, применяемые в отношении аспектов безопасности комплексных электронных систем управления транспортным средством
Б.1 Общие положения
В настоящем приложении определяются специальные предписания, касающиеся документации, концепции несрабатывания и проверки аспектов безопасности комплексных электронных систем управления ТС (см. Б.2) применительно к настоящему стандарту.
Положения настоящего приложения должны использоваться применительно к функциям обеспечения безопасности, контролируемым электронной системой (электронными системами).
В настоящем приложении не указываются критерии рабочих параметров для системы, но описываются применяющиеся методы проектирования конструкции и информирования, которые должны доводиться до сведения АИЛ.
Данная информация должна свидетельствовать о том, что система и в условиях отсутствия неисправности, и в случае неисправности отвечает всем требованиям к рабочим характеристикам, приведенным в настоящем стандарте, и предназначена для работы таким образом, чтобы это не приводило к возникновению критических рисков в области безопасности.
Б.2 Определения
В настоящем приложении применены следующие термины с соответствующими определениями.
Б.2.1 концепция безопасности: Описание мер, предусмотренных конструкцией системы, например в рамках электронных блоков, для обеспечения ее надлежащего функционирования в случае неисправности и отсутствия неисправности и следовательно ее надежного срабатывания даже в случае повреждения электрической цепи.
Примечание - Возможность перехода к частичному функционированию или поддержанию работы системы с целью выполнения главных функций ТС может рассматриваться в качестве составного элемента концепции безопасности.
Б.2.2 электронная система управления: Сочетание блоков, предназначенных для содействия в обеспечении указанной функции управления ТС на основе электронной обработки данных.
Примечание - Подобные системы, управляемые зачастую при помощи соответствующего ПО, состоят из таких дискретных функциональных компонентов, как датчики, электронные блоки управления и исполнительные механизмы, и подсоединяются через каналы связи. Они могут содержать механические, электропневматические или электрогидравлические элементы.
Получение официального утверждения типа, которое подразумевается в данной связи, требуется именно для этой системы.
Б.2.3 комплексные электронные системы управления транспортным средством: Электронные системы управления, подлежащие регулировке таким образом, что функция управления может корректироваться электронной системой/функцией управления более высокого уровня.
Примечание - Корректируемая функция становится частью комплексной системы, как и любая другая корректирующая система/функция, подпадающая под действие настоящего стандарта. К ним также относятся каналы связи в направлении к системам/функциям, не подпадающим под действие настоящего стандарта, или от систем/функций.
Системы/функции электронного управления более высокого уровня задействуют дополнительные средства обработки и/или контроля с целью изменения поведения ТС при помощи подачи команды об изменении обычной функции (обычных функций) системы управления ТС. Это позволяет комплексным системам автоматически изменять свои целевые функции, уделяя первостепенное внимание выполнению задач, обусловленных выявляемыми обстоятельствами.
Б.2.4 блоки: Наименее крупные из частей, составляющих компоненты системы, рассматриваемые в качестве единых элементов для целей идентификации, анализа или замены.
Б.2.5 каналы связи: Средства, используемые для взаимного соединения установленных блоков для передачи сигналов, обработки данных или подачи энергии.
Примечание - Это оборудование обычно является электрическим, но может быть отчасти механическим, пневматическим или гидравлическим.
Б.2.6 диапазон управления: Выходная переменная, определяющая рамки, в которых системой может осуществляться управление.
Б.2.7 пределы функциональных возможностей: Внешние физические границы, в которых система способна осуществлять управление РТС.
Б.2.8 функция обеспечения безопасности: Функция системы, способная изменить динамическое поведение РТС.
Примечание - Система может быть в состоянии выполнять несколько функций обеспечения безопасности.
Б.3 Документация
Б.3.1 Требования
Изготовитель предоставляет комплект документов об основной конструкции системы и о средствах ее соединения с другими системами ТС либо возможностях осуществления ею непосредственного контроля за выходными параметрами. Должна(ы) быть разъяснена(ы) функция(и) системы и концепция безопасности, предусмотренные изготовителем. Документация должна быть краткой, однако она должна свидетельствовать о том, что при проектировании и разработке были использованы специальные знания из всех областей, имеющих отношение к работе системы. В целях проведения периодических технических осмотров в документации должно быть указано, каким образом может быть проверено текущее рабочее состояние системы.
Б.3.1.1 АИЛ анализирует пакет документации с целью убедиться в том, что система:
а) сконструирована таким образом, чтобы функционировать в условиях отсутствия неисправности и в случае неисправности таким образом, чтобы это не приводило к возникновению критических рисков в области безопасности;
б) соответствует в состоянии исправности и неисправности всем требованиям к эффективности работы, приведенным в настоящем стандарте;
в) была разработана в соответствии с процессом/методом разработки, указанным изготовителем.
Б.3.1.2 Должна быть доступна документация следующих двух видов:
а) официальный набор документов для официального утверждения, содержащий материалы, перечисленные в Б.3 (за исключением тех, которые приведены в Б.3.4.4), которые должны передаваться АИЛ в момент подачи заявки на официальное утверждение типа. Эти документы будут использоваться в качестве основных справочных материалов для процесса проверки, приведенного в Б.4; АИЛ должна обеспечить доступность этого комплекта документов в течение периода, определенного по договоренности с органом по официальному утверждению. Этот период должен составлять не менее 10 лет с момента окончательного прекращения производства ТС;
б) дополнительные материалы и данные анализа, приведенные в Б.3.4.4, которые могут храниться у изготовителя, но должны предоставляться для проверки во время официального утверждения типа. Изготовитель должен обеспечить доступность этих материалов и аналитических данных в течение 10 лет, начиная с момента окончательного прекращения производства ТС.
Б.3.2 Описание функций системы
Представляется описание, в котором приводится разъяснение всех функций системы, связанных с управлением, и методов, используемых для достижения ее целей, включая указание механизма(ов), при помощи которого(ых) осуществляется управление. Предоставляется описание работы СОЭТ при вмешательстве водителя на этапе предупреждения о возможном столкновении и на этапе экстренного торможения.
Б.3.2.1 Представляется перечень всех вводимых и принимаемых переменных и определяется диапазон их работы.
Б.3.2.2 Представляется перечень всех выходных переменных, контролируемых системой, и в каждом случае указывается, осуществляется ли непосредственное управление или управление через другую систему РТС. Определяется диапазон управления (см. Б.2.7) применительно к каждой из таких переменных.
Б.3.2.3 Указываются пределы, определяющие границы функциональных возможностей (см. Б.2.8), если это необходимо с учетом рабочих параметров системы.
Б.3.3 Компоновка и схематическое описание системы
Б.3.3.1 Перечень компонентов
Представляется перечень, в котором перечисляются все блоки системы с указанием других систем ТС, необходимых для обеспечения данной функции управления.
Представляется краткое схематическое описание этих блоков с указанием их сочетания и с четким разъяснением аспектов установки и взаимного подсоединения оборудования.
Б.3.3.2 Функции блоков
Должны быть кратко охарактеризованы функции каждого блока системы и указаны сигналы, обеспечивающие его соединение с другими блоками или с другими системами РТС. Это может быть сделано при помощи блок-схемы с соответствующей маркировкой или иного схематического описания либо при помощи текста, сопровождающего такую схему.
Б.3.3.3 Соединения
Соединения в рамках системы обозначаются при помощи принципиальной схемы электрических каналов связи, схемы пневматического или гидравлического передающего оборудования и упрощенной диаграммной схемы механических соединений. Обозначаются также каналы связи как в сторону других систем, так и от них.
Б.3.3.4 Передача сигналов, рабочие данные и приоритеты
Обеспечивается четкое соответствие между каналами связи и сигналами и/или рабочими данными, передаваемыми между блоками. Очередность сигналов и/или рабочих данных на мультиплексных каналах указывается во всех случаях, когда она может повлиять на эксплуатационные качества или безопасность в пределах охвата настоящего стандарта.
Б.3.3.5 Идентификация блоков
Каждый блок должен четко и недвусмысленно идентифицироваться (например, посредством маркировки аппаратных и программных средств по их содержанию) для обеспечения надлежащего соответствия между программными средствами и документацией.
Если различные функции сочетаются в рамках единого блока или же единого компьютера, но указываются на многочисленных элементах блок-схемы с целью обеспечения ясности и легкости их понимания, то используется единая идентификационная маркировка аппаратных средств. При помощи этой идентификации изготовитель подтверждает, что поставляемое оборудование соответствует требованиям надлежащего документа.
Идентификация позволяет определить используемый тип аппаратного и программного обеспечения, а в случае изменения их типа с изменением функций блока, предусмотренных настоящим стандартом, данная идентификация также изменяется.
Б.3.4 Концепция безопасности изготовителя
Б.3.4.1 Изготовитель предоставляет заявление, в котором подтверждается, что стратегия, выбранная для обеспечения целевых функций системы в условиях отсутствия неисправности, не препятствует надежному функционированию ТС.
Б.3.4.2 Должны быть разъяснены элементы конфигурации ПО, используемого в системе, и определены использовавшиеся методы и средства проектирования. Изготовитель должен представить доказательства в отношении использования средств, при помощи которых была реализована логическая схема системы в процессе проектирования и практической разработки.
Б.3.4.3 Изготовитель в техническом описании разъясняет проектные условия, которым соответствует система, для обеспечения ее надежного функционирования на случай сбоя в работе. Возможными проектными условиями на случай несрабатывания системы могут служить, например следующие требования:
а) переход к функционированию с частичным использованием системы;
б) переключение на отдельную резервную систему;
в) отмена функции высокого уровня.
При возникновении сбоя/неисправности водитель РТС должен быть проинформирован о нем/ней при помощи предупреждающего сигнала либо соответствующего сообщения. Предупреждение должно сохраняться до тех пор, пока существует сбой/неисправность.
Если в соответствии с обозначенным требованием выбирается какой-либо конкретный режим функционирования при определенных условиях сбоя или неисправности, то эти условия указываются и определяются соответствующие пределы эффективности.
Если в соответствии с обозначенным требованием выбирается вторая возможность (резервная система, позволяющая обеспечить управление ТС), то должны быть разъяснены принципы работы механизма переключения, логика и уровень резервирования, а также любые резервные проверочные аспекты и определены соответствующие пределы резервной эффективности.
Если в соответствии с обозначенным требованием производится отмена функции более высокого уровня, то все соответствующие выходные сигналы управления, связанные с этой функцией, подавляются с ограничением переходных помех.
Б.3.4.4 Данная документация дополняется аналитическими данными, в целом показывающими возможности реагирования системы на любой конкретный фактор опасности или неисправность, влияющих на управление ТС или его безопасность.
Изготовитель устанавливает и обновляет выбранный(е) аналитический(е) подход(ы), который(е) во время официального утверждения типа доводится(ятся) до сведения АИЛ.
АИЛ проводит оценку применения аналитического(их) подхода(ов). Эта оценка включает:
а) проверку подхода к безопасности на уровне концепции ТС с подтверждением того, что он учитывает взаимодействие с другими системами ТС. Этот подход опирается на анализ факторов опасностей/рисков, предназначенных для оценки безопасности системы;
б) проверку подхода к безопасности на системном уровне. Этот подход основан на анализе режима и последствий неисправностей, анализе дерева неисправностей или любом аналогичном процессе, необходимом для обеспечения безопасности системы;
в) проверку планов и результатов валидации. В процессе валидации может использоваться, например аппаратно-программное моделирование, эксплуатационные испытания ТС в дорожных условиях или любые аналогичные испытания, приемлемые для целей валидации.
Освидетельствование должно включать контроль отдельных рисков и неисправностей, выбранных АИЛ для подтверждения ясности и логичности предоставленного изготовителем разъяснения концепции безопасности, а также проверки приемлемости и выполнения планов валидации.
АИЛ может проводить или поручать проведение испытаний, приведенных в Б.4, в целях проверки концепции безопасности.
В этой документации для каждого типа условия отказа, определенного в Б.3.4.4, должен содержаться перечень контролируемых параметров и указываться предупредительный сигнал, подаваемый водителю и/или сотрудникам службы, проводящей технический осмотр.
Эта документация должна включать описание мер, принимаемых для обеспечения того, чтобы система не препятствовала надежной работе РТС, когда на ее функционирование влияют такие факторы окружающей среды, как погодные явления, температурные условия, попадание пыли, проникновение воды или лед на поверхности дороги.
Б.4 Проверка и испытание
Б.4.1 Функциональные возможности системы, указанные в документах, предусмотренных в Б.3, проверяют следующим образом:
Б.4.1.1 Проверка функционирования системы
АИЛ проводит проверку системы в условиях отсутствия неисправностей путем испытания отдельных функций из числа заявленных изготовителем в Б.3.2. Для комплексных электронных систем эти испытания должны включать сценарии, при которых осуществляется вмешательство водителя на этапах работы СОЭТ.
Б.4.1.2 Проверка концепции безопасности, приведенной в Б.3.4
Выполняют проверку поведения системы в условиях сбоя в работе любого отдельного блока посредством подачи соответствующих выходных сигналов на электрические блоки или механические элементы с целью имитации внутренних неисправностей в этом блоке. АИЛ проводит эту проверку, как минимум, в отношении одного отдельного блока, однако поведение системы в случае неисправности сразу нескольких индивидуальных блоков не проверяется.
АИЛ проводит проверку на предмет того, чтобы эти испытания включали те аспекты, которые могут оказать воздействие на управляемость ТС, и информацию для пользователей (аспекты ЧМИ).
Результаты проверки должны соответствовать документально подтвержденному резюме анализа неисправности таким образом, чтобы обосновывалась адекватность концепции безопасности и методов ее применения.
Б.5 Отчетность аккредитованной испытательной лаборатории
Отчетность АИЛ по проверке осуществляется таким образом, чтобы обеспечивалась возможность оперативного контроля, например посредством кодирования и занесения в отчетные материалы технической службы вариантов проверенных документов.
Пример возможного образца формуляра оценки, используемого АИЛ и направляемого органу по официальному утверждению типа, приведен на рисунке Б.1.
Форма оценки электронных систем | |||||||||||||||||||||||
Протокол испытания N: | |||||||||||||||||||||||
1 Идентификация | |||||||||||||||||||||||
1.1 Марка транспортного средства: | |||||||||||||||||||||||
1.2 Тип: | |||||||||||||||||||||||
1.3 Средства идентификации типа, если такая маркировка имеется на транспортном средстве: | |||||||||||||||||||||||
| |||||||||||||||||||||||
1.4 Местоположение такой надписи: | |||||||||||||||||||||||
1.5 Наименование и адрес изготовителя: | |||||||||||||||||||||||
1.6 В соответствующих случаях фамилия и адрес представителя изготовителя: | |||||||||||||||||||||||
1.7 Официальный комплект документации изготовителя: | |||||||||||||||||||||||
Справочный номер документации: | |||||||||||||||||||||||
Дата первоначального выпуска: | |||||||||||||||||||||||
Дата последнего изменения: | |||||||||||||||||||||||
2 Описание испытываемого транспортного средства (испытываемых транспортных средств)/системы (систем) | |||||||||||||||||||||||
2.1 Общее описание: | |||||||||||||||||||||||
2.2 Описание всех контрольных функций системы и методов работы: | |||||||||||||||||||||||
2.3 Описание компонентов и схемы соединений в рамках системы: | |||||||||||||||||||||||
3 Концепция безопасности изготовителя | |||||||||||||||||||||||
3.1 Описание передачи сигналов, рабочие данные и их приоритетность: | |||||||||||||||||||||||
3.2 Заявление изготовителя: | |||||||||||||||||||||||
Изготовитель (изготовители) | подтверждает (подтверждают), | ||||||||||||||||||||||
что стратегия, выбранная для обеспечения целевых функций системы в условиях отсутствия неисправности, не препятствует надежному функционированию транспортного средства. | |||||||||||||||||||||||
3.3 Базовая архитектура программного обеспечения и используемые методы и средства | |||||||||||||||||||||||
проектирования: | |||||||||||||||||||||||
3.4 Разъяснение проектных условий, предусмотренных в системе для случаев неисправности: | |||||||||||||||||||||||
3.5 Документы с аналитическими данными о поведении системы при наличии конкретного | |||||||||||||||||||||||
фактора опасности или неисправности: | |||||||||||||||||||||||
3.6 Описание мер, используемых для учета условий окружающей среды: | |||||||||||||||||||||||
3.7 Положения о периодических технических проверках системы: | |||||||||||||||||||||||
3.8 Результаты проверочного испытания системы в соответствии с пунктом Б.4.1.1 | |||||||||||||||||||||||
ГОСТ Р 58839-2020 [ | |||||||||||||||||||||||
3.9 Результаты проверочного испытания концепции безопасности в соответствии с пунктом | |||||||||||||||||||||||
Б.4.1.2 ГОСТ Р 58839-2020 [ | |||||||||||||||||||||||
3.10 Дата проведения испытания: | |||||||||||||||||||||||
3.11 Данное испытание проведено и его результаты представлены согласно | |||||||||||||||||||||||
ГОСТ Р 58839-2020 [ | |||||||||||||||||||||||
Аккредитованная испытательная лаборатория | |||||||||||||||||||||||
Подпись: | Дата: | ||||||||||||||||||||||
3.12 Орган по официальному утверждению | |||||||||||||||||||||||
Подпись: | Дата: | ||||||||||||||||||||||
3.13 Замечания: | |||||||||||||||||||||||
Рисунок Б.1 - Типовая форма оценки электронных систем
________________
Подписывается различными лицами, даже если АИЛ и орган, предоставивший официальное утверждение типа, являются одной и той же организацией, либо в противном случае вместе с протоколом выдается отдельное разрешение органом, предоставившим официальное утверждение типа.
Библиография
[1] | ECE/TRANS/WP.29/78/Rev.6 | Сводная резолюция о конструкции транспортных средств (СР3) |
[2] | Правила дорожного движения Российской Федерации | |
[3] | ТР ТС 018/2011 | Технический регламент Таможенного союза "О безопасности колесных транспортных средств" |
[4] | Правила ООН N 152 | Единообразные предписания, касающиеся официального утверждения автотранспортных средств в отношении опережающей системы экстренного торможения (ОСЭТ) для транспортных средств категорий |
[5] | Правила ООН N 131 | Единообразные предписания, касающиеся официального утверждения механических транспортных средств в отношении опережающих систем экстренного торможения (ОСЭТ) |
[6] | Правила ООН N 10 | Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении электромагнитной совместимости |
[7] | Правила ООН N 13 | Единообразные предписания, касающиеся официального утверждения транспортных средств категорий M, N и O в отношении торможения |
[8] | Правила ООН N 13-Н | Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения |
[9] | Правила ООН N 121 | Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении расположения и идентификации ручных органов управления, контрольных сигналов и индикаторов |
[10] | ISO 2575:2010* | Транспорт дорожный. Символы для органов управления, индикаторов и сигнальных устройств. |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
[11] | ISO 19206-2:2018 | Транспорт дорожный. Контрольные приборы для оценки функций активной безопасности муляжей транспортных средств, уязвимых участников дорожного движения и других объектов. Часть 2. Требования к манекенам пешеходов |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: транспортное средство, система опережающего экстренного торможения, опережающее экстренное торможение | |
Электронный текст документа
и сверен по:
, 2020
