ПНСТ 383-2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТАНОВЛЕНИЕ МИНИМАЛЬНЫХ ТРЕБОВАНИЙ К ФУНКЦИОНАЛЬНОСТИ СИСТЕМ ПОМОЩИ ВОДИТЕЛЮ ПРИ ПРИНЯТИИ РЕШЕНИЯ ПРИ СМЕНЕ ПОЛОСЫ ДВИЖЕНИЯ (LCDAS), УСТАНАВЛИВАЕМЫХ НА ТРАНСПОРТНЫЕ СРЕДСТВА КАТЕГОРИЙ М И N, ОПРЕДЕЛЕНИЕ ТРЕБОВАНИЙ К ЭКСПЛУАТАЦИИ ТАКИХ СИСТЕМ, УСТАНОВЛЕНИЕ ТРЕБОВАНИЙ К МЕТОДАМ ИСПЫТАНИЙ ДАННЫХ СИСТЕМ
Establishment of minimum requirements for functionality of help systems for the driver during the change of the movement strip (LCDAS), software profitable to the vehicles of the categories M and N, defining the requirements for the operation of such systems, setting requirements for test methods
ОКС 35.240.60
Срок действия с 2020-06-01
до 2023-06-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Научно-исследовательский институт интеллектуальных транспортных систем" (ООО "НИИ ИТС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 декабря 2019 г. N 60-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 17387-2008* "Интеллектуальные транспортные системы. Содействия принятию решений о смене полосы движения (LCDAS). Требования к рабочим характеристикам и процедурам испытаний" (ISO 17387:2008 "Intelligent transport systems - Lane change decision aid systems (LCDAS) - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 105005 Москва, Армянский пер., д.9, стр.1 и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
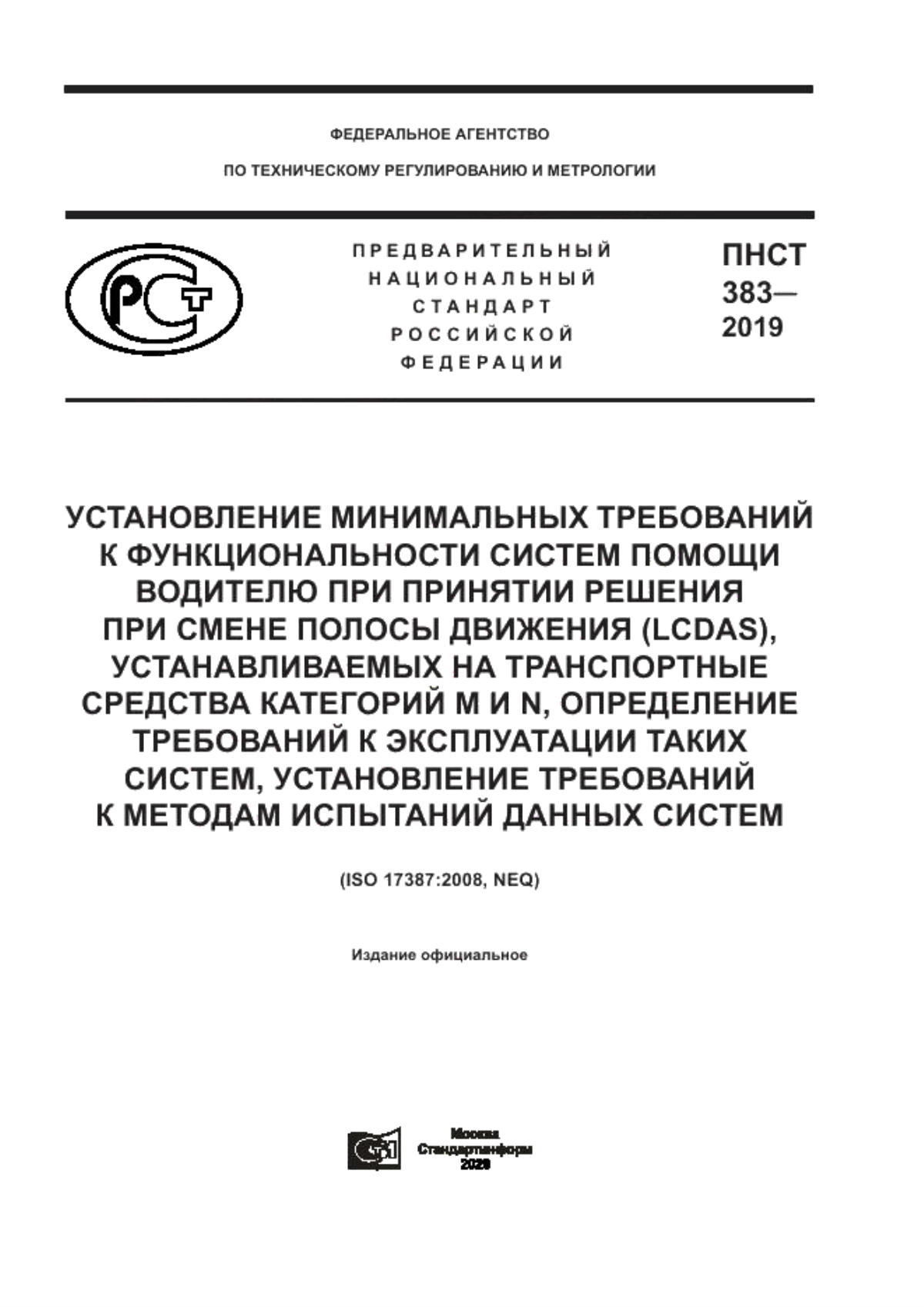
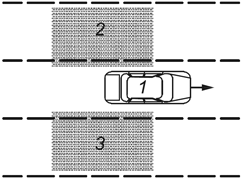
Системы содействия принятию решений о смене полосы движения (LCDAS) предупреждают водителя о столкновениях, которые могут произойти во время смены полосы движения. Системы LCDAS дополняют внутренние и наружные зеркала заднего вида транспортного средства, но не должны заменять такие зеркала. Системы LCDAS предназначены для обнаружения транспортных средств сзади и по бокам транспортного средства, на котором они установлены (см. рисунок 1). Если водитель транспортного средства сигнализирует о желании сменить полосу движения, системы LCDAS оценивают дорожную обстановку и предупреждают водителя о ситуациях, когда смена полосы движения не рекомендуется. Системы LCDAS предназначены для исключения агрессивного вождения. Отсутствие предупреждения не гарантирует, что водитель может безопасно сменить полосу движения. Система не будет предпринимать никаких автоматических действий для предотвращения возможных столкновений. Ответственность за безопасную эксплуатацию транспортного средства возлагается на водителя.
Примечание - На рисунке 1 показаны транспортные средства, движущиеся по дорогам с разметкой, однако это не означает, что системам LCDAS требуется распознавание дорожной разметки или обнаружение полосы движения. Дорожная разметка показана только для справки.
 |
1 - транспортное средство; 2 - транспортные средства-мишени; а - заштрихованная область иллюстрирует концепцию одной из возможных систем. Фактические требования приведены в разделе 4
Рисунок 1 - Концепция системы LCDAS
1 Область применения
Настоящий стандарт содержит требования и методы испытаний для систем содействия принятию решений о смене полосы движения (LCDAS). Системы LCDAS в основном предназначены для предупреждения водителя транспортного средства о возможных столкновениях с транспортными средствами, которые движутся сзади и/или по бокам в том же направлении, при смене полосы движения. Такая стандартизация затрагивает системы LCDAS, которыми оснащаются легковые автомобили, фургоны и одиночные грузовики, движущиеся вперед по автомагистралям.
Однако стандартизация не охватывает системы LCDAS, предназначенные для мотоциклов или сочлененных транспортных средств, таких как комбинации трактора/прицепа и двухсекционные автобусы.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
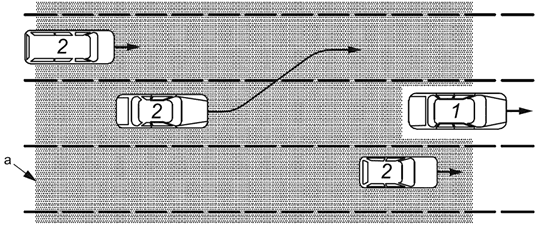
2.1 боковой зазор (относительно транспортного средства-мишени) (lateral clearance): Поперечное расстояние между боковой стороной испытуемого транспортного средства и ближней боковой стороной транспортного средства-мишени. См. рисунок 2.
 |
1 - транспортное средство; 2 - транспортное средство-мишень; 3 - боковой зазор
Рисунок 2 - Боковой зазор
2.2 время до столкновения (time to collision): Расчетное время до возможного столкновения транспортного средства-мишени с испытуемым транспортным средством, если испытуемое транспортное средство находится на пути транспортного средства-мишени и текущая скорость сближения транспортного средства-мишени останется постоянной.
Примечание - Время до столкновения можно оценить путем деления заднего зазора транспортного средства-мишени на его скорость сближения. Данное определение относится только к транспортным средствам-мишеням в задних зонах.
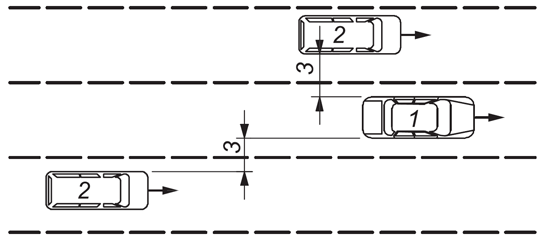
2.3 задние зоны (rear zones): Зоны, расположенные позади с обеих сторон испытуемого транспортного средства (см. рисунок 3).
Примечание - Задние зоны охватывают полосы дорожного движения, прилегающие к испытуемому транспортному средству. Положение и размер задних зон определяют относительно испытуемого транспортного средства; они не зависят от какой-либо дорожной разметки.
 |
1 - транспортное средство; 2 - задняя левая зона; 3 - задняя правая зона
Рисунок 3 - Зоны
2.4 задний зазор (относительно транспортного средства-мишени) (rear clearance): Расстояние между задней стороной испытуемого транспортного средства и передней стороной транспортного средства-мишени, измеренное вдоль прямой линии, или, как вариант, определенное посредством оценки траектории транспортного средства-мишени (см. рисунок 4).
Примечание - Данное определение относится только к транспортным средствам-мишеням в задних зонах.
2.5 зона охвата (coverage zone): Зона, которая подлежит отслеживанию системой LCDAS и состоит из определенного подмножества следующих зон: левая смежная зона, правая смежная зона, задняя левая зона и задняя правая зона.
Примечание - Система будет выполнять обнаружение транспортных средств-мишеней, находящихся в зоне охвата.
2.6 испытуемое транспортное средство (subject vehicle): Транспортное средство, оборудованное рассматриваемой системой LCDAS и относящееся к обсуждаемой теме.
2.7 радиус кривизны дороги (roadway radius of curvature): Горизонтальный радиус кривизны дороги, по которой движется испытуемое транспортное средство.
2.8 скорость обгона (относительно испытуемого транспортного средства), (overtaking speed): Разность между скоростью испытуемого транспортного средства и скоростью транспортного средства-мишени, когда испытуемое транспортное средство обгоняет транспортное средство-мишень.
Примечание - Положительная скорость обгона означает, что испытуемое транспортное средство движется быстрее транспортного средства-мишени.
2.9 скорость сближения (относительно транспортного средства-мишени) (closing speed): Разность между скоростью транспортного средства-мишени и скоростью испытуемого транспортного средства.
Примечание - Данное определение относится только к транспортным средствам-мишеням в задних зонах. Положительная скорость сближения означает, что транспортное средство-мишень приближается сзади к испытуемому транспортному средству.
 |
1 - транспортное средство; 2 - транспортное средство-мишень; 3 - задний зазор
Рисунок 4 - Примеры заднего зазора*
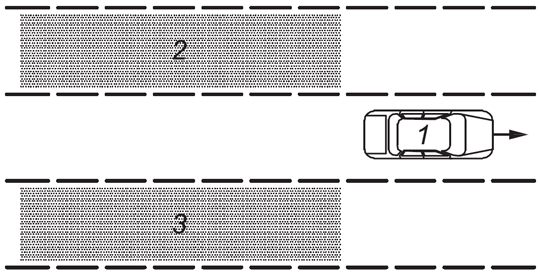
2.10 смежные зоны (adjacent zones): Зоны, расположенные слева и справа от испытуемого транспортного средства (см. рисунок 5).
Примечание - Смежные зоны охватывают полосы дорожного движения, прилегающие к испытуемому транспортному средству. Положение и размер смежных зон определяют относительно испытуемого транспортного средства, они не зависят от какой-либо дорожной разметки.
 |
1 - транспортное средство; 2 - левая смежная зона; 3 - правая смежная зона
Рисунок 5 - Смежные зоны
2.11 транспортное средство-мишень системы LCDAS (LCDAS target vehicle): Любое транспортное средство, приближающееся сзади к испытуемому транспортному средству или расположенное в одной из смежных зон.
Примечание - В настоящем стандарте транспортное средство-мишень системы LCDAS называется транспортным средством-мишенью.
2.12 функция предупреждения о непросматриваемых зонах (blind spot warning function): Функция, которая обнаруживает присутствие транспортных средств-мишеней в одной или нескольких смежных зонах и выдает предупреждения водителю испытуемого транспортного средства согласно требованиям, указанным в разделе 4.
2.13 функция предупреждения о приближающемся транспортном средстве (closing vehicle warning function): Функция, которая обнаруживает приближающиеся транспортные средства в одной или нескольких задних зонах и выдает предупреждения водителю согласно требованиям, указанным в разделе 4.
2.14 функция предупреждения о смене полосы движения (lane change warning function): Функция, совмещающая функцию предупреждения о непросматриваемых зонах и функцию предупреждения о приближающемся транспортном средстве.
3 Классификация
3.1 Классификация зон охвата
3.1.1 Общие положения
Системы LCDAS классифицируются по минимально необходимому охвату (см. таблицу 1). Например, система типа I должна охватывать по крайней мере левую и правую смежные зоны.
Таблица 1 - Классификация зон охвата
Тип | Охват левой смежной зоны | Охват правой смежной зоны | Охват задней левой зоны | Охват задней правой зоны | Функция |
I | X | X | - | - | Предупреждение о непросматриваемых зонах |
II | - | - | X | X | Предупреждение о приближающемся транспортном средстве |
III | X | X | X | X | Предупреждение о смене полосы движения |
3.1.2 Системы типа I
Системы типа I обладают только функцией предупреждения о непросматриваемых зонах. Такие системы должны предупреждать водителя транспортного средства о наличии транспортных средств-мишеней в смежных зонах. Системы типа I не обязаны предупреждать о транспортных средствах-мишенях, которые приближаются к транспортному средству сзади. Водителю транспортного средства необходимо ознакомиться с ограничениями системы этого типа (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Данная система предоставляет поддержку только в ограниченном пространстве вблизи транспортного средства. Система не может обеспечить адекватное предупреждение о транспортных средствах, приближающихся сзади".
3.1.3 Системы типа II
Системы типа II обладают только функцией предупреждения о приближающемся транспортном средстве. Такие системы не предназначены для предупреждения водителя транспортного средства о транспортных средствах-мишенях, которые приближаются к транспортному средству сзади. Системы типа II не обязаны предупреждать о транспортных средствах-мишенях, находящихся вблизи транспортного средства, поэтому рекомендуется оснащать этими системами транспортные средства, обладающие боковыми зеркалами заднего вида с горизонтальным полем обзора не менее 45° с обеих сторон транспортного средства. Если такие системы используются для других транспортных средств, руководство пользователя должно содержать следующее заявление: "Водитель должен повернуть голову и посмотреть на прилегающую область перед попыткой смены полосы движения". Водителю транспортного средства необходимо ознакомиться с ограничениями системы этого типа (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Система типа II не предоставляет поддержку для областей, смежных с транспортным средством. Такая система не может обеспечить адекватное предупреждение о транспортных средствах, очень быстро приближающихся сзади".
3.1.4 Системы типа III
Системы типа III совмещают функции предупреждения о приближающемся транспортном средстве и непросматриваемых зонах. Такие системы должны предупреждать водителя транспортного средства о наличии транспортных средств-мишеней в смежных зонах, а также о транспортных средствах-мишенях, приближающихся сзади. Водителю транспортного средства необходимо ознакомиться с ограничениями системы этого типа (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Такая система не может обеспечить адекватное предупреждение о транспортных средствах, очень быстро приближающихся сзади".
3.2 Классификация скоростей сближения транспортных средств-мишеней
3.2.1 Общие положения
Системы LCDAS типов II и III классифицируются по максимальной скорости сближения транспортного средства-мишени и минимальному радиусу кривизны дороги (см. таблицу 2). Система может соответствовать критериям нескольких типов, указанных в таблице 2. Например, высоконадежная система может соответствовать или превосходить минимальные требования, определенные индивидуально для типов А, В и С.
Таблица 2 - Классификация скоростей сближения транспортных средств-мишеней
Тип | Максимальная скорость сближения транспортного средства-мишени, м/с | Минимальный радиус кривизны дороги, м |
А | 10 | 125 |
В | 15 | 250 |
С | 20 | 500 |
Примечание - Максимальная скорость сближения транспортного средства-мишени оказывает прямое влияние на требуемый диапазон датчиков и/или время обнаружения. Более высокие скорости сближения потребуют использования датчиков с большим диапазоном и/или более коротким периодом обнаружения, чтобы позволить водителю транспортного средства своевременно получать предупреждения о приближении транспортных средств-мишеней. Кроме того, существует взаимосвязь между максимальной скоростью сближения транспортного средства-мишени и радиусом кривизны дороги. Скорость сближения транспортного средства-мишени для заданного радиуса криволинейной траектории и типичной скорости транспортного средства ограничена параметрами динамики движения.
3.2.2 Системы типа А
На рисунке 6 показана минимально необходимая область действия системы типа А с учетом радиуса кривизны дороги и скорости сближения транспортного средства-мишени. Такие системы могут работать на криволинейных участках дорог с меньшими радиусами. Водителю транспортного средства необходимо ознакомиться с ограничениями системы (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Система не может обеспечить адекватную выдачу предупреждений на криволинейных участках радиусом менее X метров", где X заменяется предельным радиусом кривой, на который рассчитана система, но не менее 125 м.
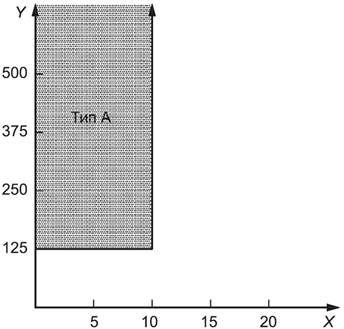 |
X - скорость сближения транспортного средства-мишени, м/с; Y - радиус кривизны дороги, м
Рисунок 6 - Минимальная область действия систем типа А
3.2.3 Системы типа В
На рисунке 7 показана минимально необходимая область действия системы типа В с учетом радиуса кривизны дороги и скорости сближения транспортного средства-мишени. Такие системы могут работать на криволинейных участках дорог с меньшими радиусами. Водителю транспортного средства необходимо ознакомиться с ограничениями системы (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Система не может обеспечить адекватную выдачу предупреждений на криволинейных участках радиусом менее X метров", где X заменяется предельным радиусом кривой, на который рассчитана система, но не менее 250 м.
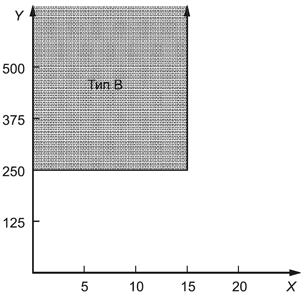 |
X - скорость сближения транспортного средства-мишени, м/с; Y - радиус кривизны дороги, м
Рисунок 7 - Минимальная область действия систем типа В
3.2.4 Системы типа С
На рисунке 8 показана минимально необходимая область действия системы типа С с учетом радиуса кривизны дороги и скорости сближения транспортного средства-мишени. Такие системы могут работать на криволинейных участках дорог с меньшими радиусами. Водителю транспортного средства необходимо ознакомиться с ограничениями системы (указаны по крайней мере в руководстве пользователя). В частности, руководство пользователя должно содержать следующее заявление: "Система не может обеспечить адекватную выдачу предупреждений на криволинейных участках радиусом менее X метров", где X заменяется предельным радиусом кривой, на который рассчитана система, но не менее 500 м.
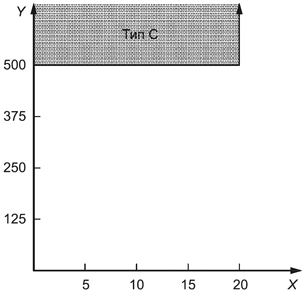 |
X - скорость сближения транспортного средства-мишени, м/с; Y - радиус кривизны дороги, м
Рисунок 8 - Минимальная область действия систем типа С
4 Функциональные требования
4.1 Диаграмма состояний системы LCDAS
4.1.1 Общие положения
Система LCDAS должна работать, как минимум, в соответствии с диаграммой состояний, показанной на рисунке 9.
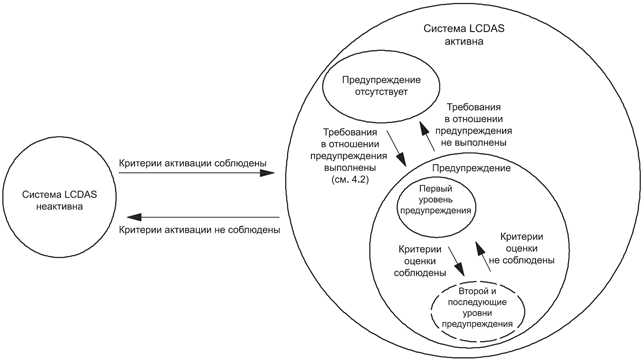 |
Рисунок 9 - Диаграмма состояний системы LCDAS
4.1.2 Неактивное состояние системы LCDAS
В неактивном состоянии система LCDAS не должна выдавать предупреждения водителю. Такое состояние может соответствовать отсутствию электропитания или состоянию готовности. В состоянии готовности система может обнаруживать транспортные средства-мишени, но не должна выдавать предупреждения, поскольку критерии активации не соблюдены.
4.1.3 Критерии активации
4.1.3.1 Общие положения
После активации система LCDAS должна перейти из неактивного состояния в активное состояние. Одновременно можно использовать несколько критериев активации. Например, возможны среди прочего следующие способы активации.
4.1.3.2 Постоянная активация
Система может активироваться постоянно (при включении зажигания транспортного средства).
4.1.3.3 Активация с помощью ручного переключателя
Система может активироваться вручную, например с помощью тумблера, ртутного выключателя или меню пользовательского интерфейса.
4.1.3.4 Активация при включении указателя поворота
Система может активироваться с учетом состояния указателя поворота транспортного средства. Например, при включении указателя поворота влево система может активироваться с левой стороны транспортного средства, при этом система остается неактивной с правой стороны транспортного средства.
4.1.3.5 Активация по скорости транспортного средства
Система может активироваться с учетом скорости транспортного средства. В этом случае, если скорость транспортного средства больше или равна определенной пороговой скорости, система LCDAS перейдет в активное состояние. Пороговая скорость не должна превышать 16,7 м/с (60 км/ч).
4.1.4 Активное состояние системы LCDAS
4.1.4.1 Общие положения
В активном состоянии система LCDAS должна обнаруживать транспортные средства-мишени.
4.1.4.2 Состояние отсутствия предупреждений
В состоянии отсутствия предупреждений система активна, но требования по выдаче предупреждений не выполняются.
4.1.4.3 Состояние предупреждения
1) Общие положения
В состоянии предупреждения система активна и выполняются требования, предъявляемые к выдаче предупреждений.
2) Состояние предупреждения уровня 1
В состоянии предупреждения уровня 1 выполняются требования, предъявляемые к выдаче предупреждений, но не соблюдаются критерии оценки. Предупреждение, выданное водителю в этом состоянии, является менее срочным, чем предупреждения уровня 2 и любых последующих уровней предупреждения.
3) Критерии оценки
а) Общие положения
Критерии оценки представляют собой определенные параметры, которые могут отслеживаться системой LCDAS. Такие критерии оценки должны оказаться полезными при определении намерения водителя изменить полосу движения. При соблюдении одного или нескольких этих критериев оценки система может перейти из состояния предупреждения уровня 1 в состояние предупреждения уровня 2 и выше. Одновременно можно использовать несколько критериев оценки. Потенциально возможны в частности следующие критерии оценки.
б) Оценка состояния указателя поворота
Система может оценивать состояние указателя поворота транспортного средства. Например, при включении указателя поворота влево система может перейти к предупреждению уровня 2 или выше с левой стороны транспортного средства, при этом система остается в неизменном состоянии с правой стороны транспортного средства.
в) Оценка воздействия на рулевой механизм транспортного средства
Система может оценивать воздействие водителя на рулевой механизм транспортного средства. Например, если система обнаруживает, что водитель инициирует смену полосы движения влево, она может перейти к предупреждению уровня 2 или выше с левой стороны транспортного средства, при этом система остается в неизменном состоянии с правой стороны транспортного средства.
г) Оценка положения полосы движения транспортного средства
Система может оценивать положение транспортного средства и/или поперечное движение в пределах его полосы. Например, если система обнаруживает, что транспортное средство движется в направлении или внутри полосы движения слева, она может перейти к предупреждению уровня 2 или выше с левой стороны транспортного средства, при этом система остается в неизменном состоянии с правой стороны транспортного средства.
д) Оценка бокового зазора
Система может оценивать боковой зазор относительно транспортного средства. Система, способная измерять боковой зазор, может перейти к предупреждению уровня 2 или выше, когда боковой зазор меньше заданного порогового значения.
4) Второй и последующие уровни предупреждения
Предупреждения уровня 2 и выше относятся к категории необязательных состояний. В этих состояниях выполняются требования, предъявляемые к выдаче предупреждений, и соблюдается один или несколько критериев оценки. Предупреждения, выдаваемые водителю в этих состояниях, требуют более срочного реагирования, чем предупреждения, выдаваемые в состоянии предупреждения уровня 1.
4.2 Характеристики системы
4.2.1 Общие положения
Для описания требований, предъявляемых к предупреждениям о непросматриваемых зонах и приближающихся транспортных средствах, необходимы линии, показанные на рисунке 10. Обозначения справа, слева и сзади относятся к направлению движения транспортного средства. Дорожная разметка показана на рисунке 10 только для справки. Все размеры указаны относительно транспортного средства.
- Линия А должна располагаться параллельно заднему краю транспортного средства на расстоянии 30,0 м позади него.
- Линия В должна располагаться параллельно заднему краю транспортного средства на расстоянии 3,0 м позади него.
- Линия С должна располагаться параллельно переднему краю транспортного средства по центру эллипса 95-го процентиля.
- Линия D должна совпадать с передним краем транспортного средства.
- Линия Е должна располагаться параллельно центральной линии транспортного средства и совпадать с левым внешним краем кузова транспортного средства без наружного зеркала заднего вида.
- Линия F должна располагаться параллельно центральной линии транспортного средства на расстоянии 0,5 м слева от левого внешнего края кузова транспортного средства.
- Линия G должна располагаться параллельно центральной линии транспортного средства на расстоянии 3,0 м слева от левого внешнего края кузова транспортного средства.
- Линия Н должна располагаться параллельно центральной линии транспортного средства на расстоянии 6,0 м слева от левого внешнего края кузова транспортного средства.
- Линия J должна располагаться параллельно центральной линии транспортного средства и совпадать с правым внешним краем кузова транспортного средства без наружного зеркала заднего вида.
- Линия K должна располагаться параллельно центральной линии транспортного средства на расстоянии 0,5 м справа от правого внешнего края кузова транспортного средства.
- Линия L должна располагаться параллельно центральной линии транспортного средства на расстоянии 3,0 м справа от правого внешнего края кузова транспортного средства.
- Линия М должна располагаться параллельно центральной линии транспортного средства на расстоянии 6,0 м справа от правого внешнего края кузова транспортного средства.
- Линия N должна совпадать с задним краем транспортного средства.
- Линия О должна располагаться параллельно заднему краю транспортного средства на расстоянии 10,0 м позади него.
4.2.2 Минимальный размер транспортного средства-мишени
Система LCDAS должна обнаруживать транспортные средства-мишени, которые имеют как минимум габариты мотоцикла, которому разрешено движение по скоростным автомагистралям, вместе с водителем.
4.2.3 Требования, предъявляемые к функции предупреждения о непросматриваемых зонах
4.2.3.1 Требования, предъявляемые к предупреждениям, выдаваемым с помощью функции предупреждения о непросматриваемых зонах
1) Общие положения
Функция предупреждения о непросматриваемых зонах должна охватывать левую и правую смежные зоны. Линии, показанные на рисунке 10, необходимы для формулирования требований, предъявляемых к выдаче предупреждений о непросматриваемых зонах.
Примечание - Охват смежных зон используется в качестве дополнения зеркал заднего вида, установленных на транспортном средстве.
2) Требования, предъявляемые к выдаче предупреждений о непросматриваемых зонах с левой стороны
Предупреждение о непросматриваемых зонах с левой стороны (см. рисунок 10) должно выдаваться водителю транспортного средства в тех случаях, когда транспортное средство-мишень соответствует всем следующим условиям:
все части транспортного средства-мишени находятся впереди линии В;
транспортное средство-мишень находится полностью позади линии С;
транспортное средство-мишень находится полностью слева от линии F;
все части транспортного средства-мишени находятся справа от линии G.
Если в зоне, ограниченной линиями A, D, Е и Н, отсутствуют транспортные средства-мишени или какие-либо их части, предупреждение о левосторонних непросматриваемых зонах не должно выдаваться.
Примеры предупреждения о непросматриваемых зонах см. в приложении А.
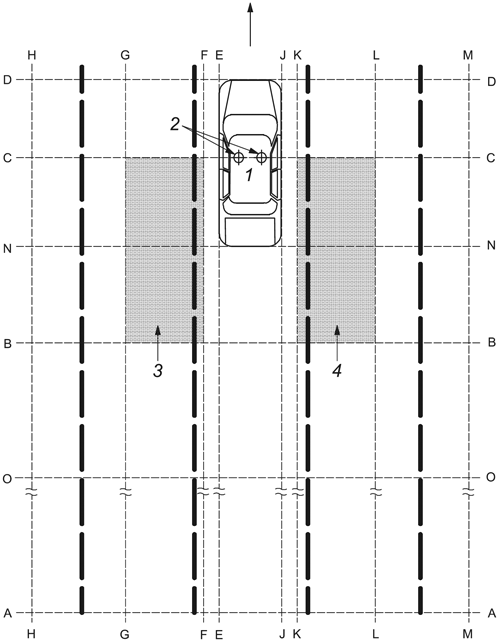 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - левая смежная зона; 4 - правая смежная зона
Рисунок 10 - Схема для формулирования требований в отношении предупреждений
3) Требования, предъявляемые к выдаче предупреждений о непросматриваемых зонах с правой стороны
Предупреждение о непросматриваемых зонах с правой стороны (см. рисунок 10) должно выдаваться водителю транспортного средства в тех случаях, когда транспортное средство-мишень соответствует всем следующим условиям:
все части транспортного средства-мишени находятся впереди линии В;
транспортное средство-мишень находится полностью позади линии С;
транспортное средство-мишень находится полностью справа от линии K;
все части транспортного средства-мишени находятся слева от линии L.
Если в зоне, ограниченной линиями A, D, J и М, отсутствуют транспортные средства-мишени или какие-либо их части, предупреждение о правосторонних непросматриваемых зонах не должно выдаваться.
Примеры предупреждения о непросматриваемых зонах см. в приложении А.
4.2.3.2 Блокировка предупреждений о непросматриваемых зонах
Если транспортное средство обгоняет транспортное средство-мишень, которое вошло в смежную зону спереди, предупреждение о непросматриваемых зонах можно блокировать не более чем на 2 с после того, как требуется первое предупреждение о непросматриваемых зонах.
4.2.4 Требования, предъявляемые к функции предупреждения о приближающемся транспортном средстве
4.2.4.1 Требования, предъявляемые к предупреждениям, выдаваемым с помощью функции предупреждения о приближающемся транспортном средстве
1) Общие положения
Функция предупреждения о приближающемся транспортном средстве должна охватывать левую и правую смежные зоны. Линии, показанные на рисунке 10, необходимы для формулирования требований, предъявляемых к выдаче предупреждений. Для систем, способных оценивать геометрические параметры проезжей части, эти линии могут задаваться с учетом кривизны проезжей части.
2) Требования, предъявляемые к выдаче предупреждений о приближающемся транспортном средстве с левой стороны
Предупреждение о приближающемся транспортном средстве с левой стороны (см. рисунок 10) должно выдаваться водителю транспортного средства в тех случаях, когда транспортное средство-мишень соответствует всем следующим условиям:
транспортное средство-мишень находится полностью позади линии В;
транспортное средство-мишень находится полностью слева от линии F;
все части транспортного средства-мишени находятся справа от линии G;
расчетное время до столкновения с транспортным средством-мишенью меньше или равно значению, указанному в таблице 3.
Таблица 3 - Классификация времени предупреждения о приближающемся транспортном средстве с учетом скоростей сближения транспортных средств-мишеней
Тип | Максимальная скорость сближения транспортного средства-мишени при полной эффективности системы, м/с | Время до столкновения, с |
А | 10 | 2,5 |
В | 15 | 3,0 |
С | 20 | 3,5 |
Для транспортных средств-мишеней, находящихся в задней левой зоне позади линии А, предупреждение о приближающемся слева транспортном средстве не выдается, если оценочное время до столкновения с любым из транспортных средств-мишеней равно или превышает 7,5 с.
Для транспортных средств-мишеней, расположенных вровень или впереди линии А, предупреждение о приближающемся слева транспортном средстве не выдается при соблюдении любого из следующих условий:
транспортное средство-мишень находится полностью впереди линии N;
в области между линиями Е и Н нет никаких частей транспортного средства-мишени.
3) Требования, предъявляемые к выдаче предупреждений о приближающемся транспортном средстве с правой стороны
Предупреждение о приближающемся транспортном средстве с правой стороны (см. рисунок 10) должно выдаваться водителю транспортного средства в тех случаях, когда транспортное средство-мишень соответствует всем следующим условиям:
транспортное средство-мишень находится полностью позади линии В;
транспортное средство-мишень находится полностью справа от линии K;
все части транспортного средства-мишени находятся слева от линии L;
расчетное время до столкновения с транспортным средством-мишенью меньше или равно значению, указанному в таблице 3.
Для транспортных средств-мишеней, находящихся в задней правой зоне позади линии А, предупреждение о приближающемся справа транспортном средстве не выдается, если оценочное время до столкновения с любым из транспортных средств-мишеней равно или превышает 7,5 с.
Для транспортных средств-мишеней, расположенных вровень или впереди линии А, предупреждение о приближающемся справа транспортном средстве не выдается при соблюдении любого из следующих условий:
транспортное средство-мишень находится полностью впереди линии N;
в области между линиями J и М нет никаких частей транспортного средства-мишени.
4) Предупреждение о приближении транспортных средств с обеих сторон
Предупреждение о транспортных средствах-мишенях, приближающихся одновременно с обеих сторон транспортного средства (см. рисунок 10), должно выдаваться водителю транспортного средства в тех случаях, когда транспортные средства-мишени соответствуют всем следующим условиям:
предупреждение о приближающемся слева транспортном средстве в настоящее время не требуется (см. 4.2.4.1.2);
предупреждение о приближающемся справа транспортном средстве в настоящее время не требуется (см. 4.2.4.1.3);
все части транспортного средства-мишени находятся между линиями Е и J;
транспортное средство-мишень находится полностью позади линии О;
расчетное время до столкновения с транспортным средством-мишенью меньше или равно значению, указанному в таблице 3.
4.2.4.2 Дополнительная информация о приближающихся транспортных средствах
Наглядная информация, относящаяся к одному или нескольким транспортным средствам-мишеням (например, местоположение транспортного средства-мишени, скорость сближения и т.д.), может предоставляться водителю транспортного средства в любое время при условии, что эта информация четко отличается от предупредительной индикации.
4.2.5 Требования, предъявляемые к функции предупреждения о смене полосы движения
4.2.5.1 Требования, предъявляемые к предупреждениям, выдаваемым с помощью функции предупреждения о смене полосы движения
Требования, предъявляемые к предупреждениям, выдаваемым с помощью функции предупреждения о смене полосы движения, представляют собой комбинацию требований, связанных с функцией предупреждения о непросматриваемых зонах и функцией предупреждения о приближающемся транспортном средстве. В этой ситуации требования, предъявляемые к предупреждению о непросматриваемых зонах, предусматривают наличие, возможность или отсутствие выдачи предупреждений. В такой же ситуации требования, предъявляемые к предупреждению о приближающемся транспортном средстве, предусматривают наличие, возможность или отсутствие выдачи предупреждений. На основе этих требований функция предупреждения о смене полосы движения должна выдавать предупреждения согласно таблице 4.
Таблица 4 - Требования, предъявляемые к предупреждению о смене полосы движения
Должно выдаваться предупреждение о непросматриваемых зонах | Возможна выдача предупреждения о непросматриваемых зонах | Не должно выдаваться предупреждение о непросматриваемых зонах | |
Должно выдаваться предупреждение о приближающемся транспортном средстве | Должно выдаваться предупреждение о смене полосы движения | Должно выдаваться предупреждение о смене полосы движения | Должно выдаваться предупреждение о смене полосы движения |
Возможна выдача предупреждения о приближающемся транспортном средстве | Должно выдаваться предупреждение о смене полосы движения | Возможна выдача предупреждения о смене полосы движения | Возможна выдача предупреждения о смене полосы движения |
Не должно выдаваться предупреждение о приближающемся транспортном средстве | Должно выдаваться предупреждение о смене полосы движения | Возможна выдача предупреждения о смене полосы движения | Не должно выдаваться предупреждение о смене полосы движения |
4.2.6 Время отклика системы
Общее время отклика системы с момента, когда мишень удовлетворяет требованиям предупреждения, до момента активации предупредительной индикации не должно превышать 300 мс.
Общее время отклика системы с момента, когда условия выдачи предупреждения больше не соблюдаются, до момента выключения предупредительной индикации не должно превышать 1 с.
4.3 Пользовательский интерфейс
4.3.1 Индикация состояния системы LCDAS
4.3.1.1 Общие положения
Существуют две возможности указания состояния системы LCDAS. Система должна использовать, как минимум, одну из следующих двух возможностей: индикация LCDAS по выбору водителя или индикация активного/неактивного состояния LCDAS.
4.3.1.2 Индикация LCDAS по выбору водителя
Если водитель имеет возможность включения и выключения индикации системы вручную, индикация должна выполняться по выбору водителя. Такая индикация должна быть наглядной. Если для включения и выключения системы вручную используется переключатель, такой переключатель может рассматриваться в качестве индикатора, и его позиции должен четко понимать водитель.
4.3.1.3 Индикация активного/неактивного состояния системы LCDAS
Система должна указывать, находится ли она в активном или неактивном состоянии (см. 4.1). Такая индикация должна быть наглядной.
4.3.2 Предупредительная индикация системы LCDAS
4.3.2.1 Общие положения
Системное предупреждение должно выдаваться водителю транспортного средства, выполняющего маневр для смены полосы движения, который приведет к возникновению опасной ситуации. Предупредительная индикация LCDAS активна в состоянии предупреждения (см. 4.1).
4.3.2.2 Способ предупредительной индикации LCDAS
В состоянии предупреждения уровня 1 (см. 4.1) должна использоваться только наглядная системная предупредительная индикация. В состоянии предупреждения уровня 2 и выше (см. 3.1) возможно использование наглядной, звуковой и/или тактильной системной предупредительной индикации. Рекомендуется использовать предупреждения, которые каким-либо образом указывают сторону обнаружения транспортного средства-мишени. Рекомендуется размещать индикаторы наглядного предупреждения в местах, которые будут стимулировать использование зеркал заднего вида. Наглядные предупреждения должны быть четко различимы среди другой визуальной информации в салоне транспортного средства. Звуковое предупреждение должно быть четко различимо среди других звуковых сигналов в салоне транспортного средства. Если используется тактильное предупреждение, оно также должно явно выделяться среди других тактильных сигналов в салоне транспортного средства.
4.3.3 Индикация неисправности системы LCDAS
Индикация неисправности указывает водителю транспортного средства, что во время самодиагностики LCDAS (см. 4.5) обнаружена неисправность системы.
Индикация неисправности LCDAS должна быть наглядной и/или звуковой и однозначно информировать водителя о наличии неисправности системы.
4.4 Работа при наличии прицепов
Размеры, указанные в требованиях, предъявляемых к предупреждениям системы LCDAS, относятся только к транспортному средству без какого-либо присоединенного прицепа. Если к транспортному средству присоединен прицеп, система LCDAS должна работать в рамках одного из следующих вариантов (в порядке предпочтения):
а) система работает согласно своим нормальным возможностям.
Примечание - Область действия системы не охватывает прицеп;
б) система, которая не может функционировать обычным образом, информирует водителя о том, что она недоступна или отключена;
в) система работает неправильно. В этом случае руководство пользователя транспортного средства должно содержать уведомление о том, что система не работает правильно при наличии присоединенного прицепа.
4.5 Требования, предъявляемые к самодиагностике
Система должна, как минимум, обладать нижеперечисленными функциями самодиагностики, выполняемыми по меньшей мере после каждого включения системы.
Система должна проверять:
правильность функционирования основных электронных компонентов;
правильность функционирования всех датчиковых элементов.
Система должна автоматически выполнять вышеуказанные процедуры самодиагностики и при обнаружении неисправности генерировать индикацию неисправности системы LCDAS (см. 4.3.3).
5 Требования, предъявляемые к испытаниям
5.1 Транспортное средство-мишень, предназначенное для испытаний
В качестве транспортного средства-мишени для каждого из нижеуказанных испытаний должен использоваться мотоцикл с водителем. Испытательное транспортное средство-мишень должно иметь следующие размеры. Длина мотоцикла - от 2,0 м до 2,5 м. Ширина мотоцикла (максимальная ширина без учета боковых зеркал заднего вида) - от 0,7 м до 0,9 м. Высота мотоцикла (без учета ветрового стекла) - от 1,1 м до 1,5 м.
5.2 Условия окружающей среды
Испытания должны проводиться на ровной, сухой асфальтированной или бетонной поверхности. Температура окружающей среды во время испытаний должна быть в пределах от 10°С до 30°С. Дальность видимости в горизонтальном направлении должна превышать 1 км.
5.3 Условия испытаний для проверки выдачи предупреждений о непросматриваемых зонах
5.3.1 Общие положения
В 5.3.2 и 5.3.3 содержится описание минимальных требований, предъявляемых к испытаниям систем предупреждения о непросматриваемых зонах (система LCDAS типа I).
5.3.2 Измерительная система для проверки выдачи предупреждений о непросматриваемых зонах
Такая измерительная система должна:
- полностью не зависеть от испытываемой системы предупреждения о непросматриваемых зонах;
- измерять продольное расстояние между задним краем транспортного средства и передним краем транспортного средства-мишени, если транспортное средство-мишень находится позади транспортного средства;
- измерять продольное расстояние между передним краем транспортного средства и задним краем транспортного средства-мишени, если транспортное средство-мишень находится впереди транспортного средства;
- измерять поперечное расстояние между левым краем транспортного средства и правым краем транспортного средства-мишени, если транспортное средство-мишень находится слева от транспортного средства;
- измерять поперечное расстояние между правым краем транспортного средства и левым краем транспортного средства-мишени, если транспортное средство-мишень находится справа от транспортного средства;
- измерять задержку с момента, когда транспортное средство-мишень соответствует условиям предупреждения, до момента выдачи предупреждения;
- измерять задержку с момента, когда условия предупреждения больше не соблюдаются, до момента прекращения выдачи предупреждения.
Измерительная система должна обеспечивать для всех испытательных процедур следующие точности.
Точность измерения расстояний:
- для расстояний менее 2 м точность должна равняться 0,1 м или лучше;
- для расстояний от 2 м до 10 м точность должна равняться 5% или лучше;
- для расстояний больше 10 м точность должна равняться 0,5 м или лучше.
Точность измерений времени:
- для интервалов времени менее 200 мс точность должна равняться 20 мс или лучше;
- для интервалов времени от 200 мс до 1 с точность должна равняться 10% или лучше;
- для интервалов времени больше 1 с точность должна равняться 100 мс или лучше.
5.3.3 Процедуры проверки выдачи предупреждений о непросматриваемых зонах
5.3.3.1 Общие положения
Во время всех последующих испытаний должны соблюдаться все уместные критерии активации.
5.3.3.2 Транспортное средство-мишень, обгоняющее транспортное средство
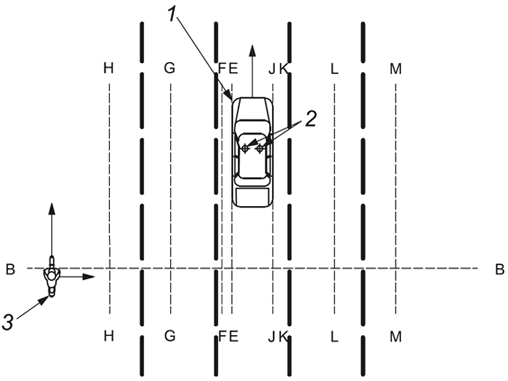
Данные испытания проводят с целью проверки своевременности выдачи предупреждений системой предупреждения о непросматриваемых зонах, когда транспортное средство-мишень обгоняет транспортное средство. Испытание необходимо проводить следующим образом (см. рисунок 11 и 4.2).
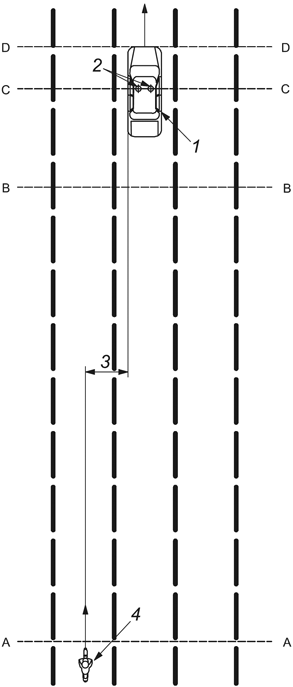 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - поперечное расстояние; 4 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 11 - Транспортное средство-мишень, обгоняющее транспортное средство
На прямой, ровной испытательной трассе транспортное средство должно двигаться по прямолинейной траектории с минимальной постоянной скоростью 20 м/с. Испытательное транспортное средство-мишень должно двигаться по прямой линии (см. рисунок 11) таким образом, чтобы скорость сближения находилась в диапазоне от 1 м/с до 3 м/с. Оба транспортных средства должны двигаться таким образом, чтобы поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени находилось в диапазоне от 2,0 м до 3,0 м. До начала испытания транспортное средство-мишень должно полностью располагаться позади линии А.
Когда транспортное средство-мишень приближается и обгоняет транспортное средство, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью позади линии А;
- после пересечения линии А транспортным средством-мишенью система должна инициировать выдачу предупреждения для подходящей стороны транспортного средства не позднее времени пересечения передним краем транспортного средства-мишени линии В и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока передний край транспортного средства-мишени не пересечет линию С;
- система должна прекратить выдачу предупреждения не позднее времени, когда задний край транспортного средства-мишени пересечет линию D, и временем отклика системы, указанном в 4.2.6.
Такое испытание должно повторяться в общей сложности двенадцать раз согласно таблице 5. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно шесть испытаний при дневном или ночном освещении.
Таблица 5 - Проверка выдачи предупреждений о непросматриваемых зонах во время обгона транспортным средством-мишенью
| День | Ночь |
Испытательная мишень слева от транспортного средства | 3 испытания | 3 испытания |
Испытательная мишень справа от транспортного средства | 3 испытания | 3 испытания |
5.3.3.3 Транспортное средство, обгоняющее транспортное средство-мишень
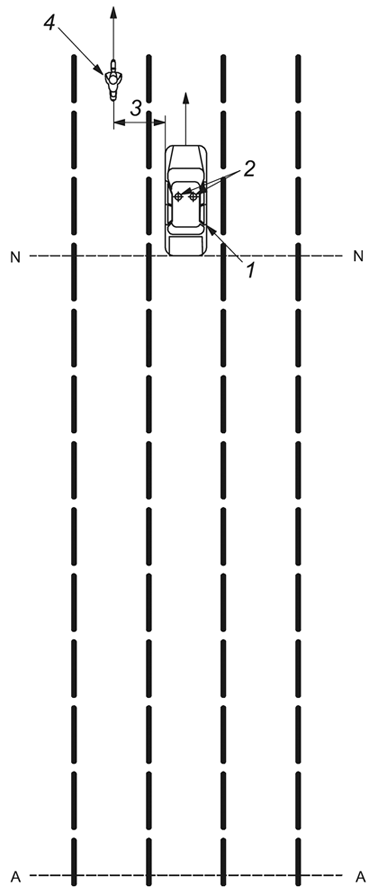
Данное испытание проводят с целью проверки своевременности выдачи предупреждений системой предупреждения о непросматриваемых зонах, когда транспортное средство обгоняет транспортное средство-мишень. Испытание должно проводиться следующим образом (см. рисунок 12 и 4.2).
На прямой ровной испытательной трассе транспортное средство-мишень должно двигаться по прямолинейной траектории с минимальной постоянной скоростью 20 м/с. Транспортное средство должно двигаться по прямой линии (см. рисунок 12) таким образом, чтобы скорость обгона находилась в диапазоне от 1 м/с до 2 м/с. Оба транспортных средства должны двигаться таким образом, чтобы поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени находилось в диапазоне от 2,0 м до 3,0 м. До начала испытания передний край транспортного средства должен находиться позади заднего края испытательного транспортного средства-мишени.
Когда транспортное средство приближается и обгоняет транспортное средство-мишень, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью впереди линии D;
- после пересечения линии D задним краем транспортного средства-мишени система должна инициировать выдачу предупреждения для подходящей стороны транспортного средства не позднее времени пересечения передним краем транспортного средства-мишени линии С и времени отклика системы, указанного в 4.2.6, и продолжительности необязательной блокировки предупреждений, указанной в 4.2.3.2;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока передний край транспортного средства-мишени не пересечет линию В;
- система должна прекратить выдачу предупреждения не позднее времени, когда передний край транспортного средства-мишени пересечет линию А, и времени отклика системы, указанного в 4.2.6.
Такое испытание должно повторяться в общей сложности двенадцать раз согласно таблице 6. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно шесть испытаний при дневном или ночном освещении.
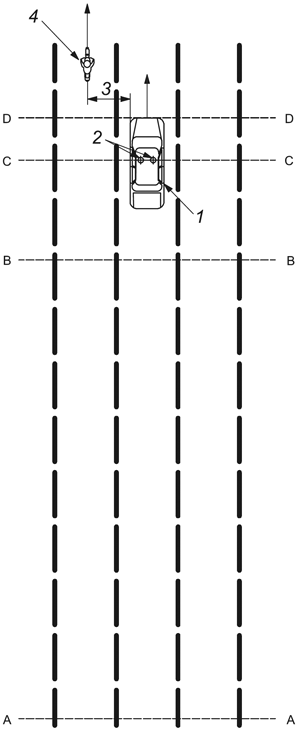 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - поперечное расстояние; 4 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 12 - Транспортное средство, обгоняющее транспортное средство-мишень
Таблица 6 - Проверка выдачи предупреждений о непросматриваемых зонах, когда транспортное средство обгоняет транспортное средство-мишень
| День | Ночь |
Испытательная мишень слева от транспортного средства | 3 испытания | 3 испытания |
Испытательная мишень справа от транспортного средства | 3 испытания | 3 испытания |
5.3.3.4 Испытание на ложные предупреждения
Данное испытание проводят с целью проверки отсутствия выдачи системой предупреждений о непросматриваемых зонах, когда транспортное средство-мишень и транспортное средство разделяет одна полоса движения. Последовательность испытаний, описанную в 4.3.2.2 и 4.3.2.3, необходимо повторить в модифицированном виде следующим образом. Для каждого испытания поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени должно находиться в диапазоне от 6,5 м до 7,5 м. Система не должна выдавать никаких предупреждений во время проведения этих испытаний.
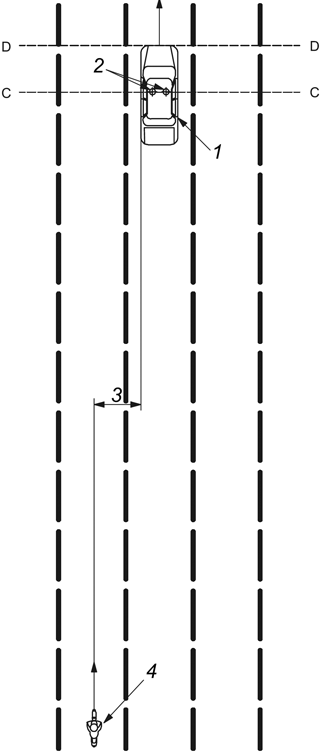
5.3.3.5 Транспортное средство-мишень, движущееся поперечно
Данное испытание проводят с целью проверки своевременности выдачи предупреждений системой предупреждения о непросматриваемых зонах, когда транспортное средство-мишень движется сбоку вблизи транспортного средства. Испытание должно проводиться следующим образом (см. рисунок 13 и 4.2).
На прямой ровной испытательной трассе транспортное средство должно двигаться по прямолинейной траектории с минимальной постоянной скоростью 20 м/с. Испытательное транспортное средство-мишень должно двигаться относительно транспортного средства со скоростью, которая позволяет переднему краю транспортного средства-мишени находиться между линией В и транспортным средством на протяжении всего испытания. До начала испытания транспортное средство-мишень должно полностью располагаться слева от линии Н. Транспортное средство-мишень должно двигаться вправо с поперечной скоростью от 0,25 м/с до 0,75 м/с до тех пор, пока оно не окажется полностью справа от линии М. После этого транспортное средство-мишень должно двигаться влево с поперечной скоростью от 0,25 м/с до 0,75 м/с до тех пор, пока оно не окажется полностью слева от линии Н.
Когда транспортное средство-мишень движется слева направо, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью слева от линии Н;
- после пересечения линии Н транспортным средством-мишенью система должна инициировать выдачу предупреждения для левой стороны транспортного средства не позднее времени пересечения правым краем транспортного средства-мишени линии G и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока правый край транспортного средства-мишени не пересечет линию F;
- система должна прекратить выдачу предупреждения не позднее времени, когда левый край транспортного средства-мишени пересечет линию Е, и времени отклика системы, указанного в 4.2.6;
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью между линиями Е и J;
- после пересечения линии J транспортным средством-мишенью система должна инициировать выдачу предупреждения для правой стороны транспортного средства не позднее времени пересечения левым краем транспортного средства-мишени линии K и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока левый край транспортного средства-мишени не пересечет линию L;
- система должна прекратить выдачу предупреждения не позднее времени, когда левый край транспортного средства-мишени пересечет линию М, и времени отклика системы, указанного в 4.2.6.
Когда транспортное средство-мишень движется справа налево, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью справа от линии М;
- после пересечения линии М транспортным средством-мишенью система должна инициировать выдачу предупреждения для правой стороны транспортного средства не позднее времени пересечения левым краем транспортного средства-мишени линии L и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока левый край транспортного средства-мишени не пересечет линию K;
- система должна прекратить выдачу предупреждения не позднее времени, когда правый край транспортного средства-мишени пересечет линию J и времени отклика системы, указанного в 4.2.6;
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью между линиями Е и J;
- после пересечения линии Е транспортным средством-мишенью система должна инициировать выдачу предупреждения для левой стороны транспортного средства не позднее времени пересечения правым краем транспортного средства-мишени линии F и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока правый край транспортного средства-мишени не пересечет линию G;
- система должна прекратить выдачу предупреждения не позднее времени, когда правый край транспортного средства-мишени пересечет линию Н и времени отклика системы, указанного в 4.2.6.
Такое испытание должно повторяться в общей сложности шесть раз согласно таблице 7. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно три испытания при дневном или ночном освещении.
Таблица 7 - Проверка выдачи предупреждений о непросматриваемых зонах во время поперечного движения транспортного средства-мишени
День | Ночь |
3 испытания | 3 испытания |
 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 13 - Поперечно движущееся транспортное средство-мишень
5.4 Условия испытаний для проверки выдачи предупреждений о приближающемся транспортном средстве
5.4.1 Общие положения
В 5.4.2 и 5.4.3 содержится описание минимальных требований, предъявляемых к испытаниям систем предупреждения о приближающемся транспортном средстве (система LCDAS типа II).
5.4.2 Измерительная система для проверки выдачи предупреждений о приближающемся транспортном средстве
Такая измерительная система должна:
- полностью не зависеть от испытываемой системы предупреждения о приближающемся транспортном средстве;
- измерять продольное расстояние между задним краем транспортного средства и передним краем транспортного средства-мишени, если транспортное средство-мишень находится позади транспортного средства;
- измерять скорость сближения транспортного средства-мишени, если транспортное средство-мишень приближается к транспортному средству сзади;
- измерять поперечное расстояние между левым краем транспортного средства и правым краем транспортного средства-мишени, если транспортное средство-мишень находится слева от транспортного средства;
- измерять поперечное расстояние между правым краем транспортного средства и левым краем транспортного средства-мишени, если транспортное средство-мишень находится справа от транспортного средства;
- измерять задержку с момента, когда транспортное средство-мишень соответствует условиям предупреждения, до момента выдачи предупреждения;
- измерять задержку с момента, когда условия предупреждения больше не соблюдаются, до момента прекращения выдачи предупреждения.
Измерительная система должна обеспечивать для всех испытательных процедур следующие точности.
Точность измерения расстояний:
- для расстояний менее 2 м точность должна равняться 0,1 м или лучше;
- для расстояний от 2 м до 10 м точность должна равняться 5% или лучше;
- для расстояний больше 10 м точность должна равняться 0,5 м или лучше.
Точность измерений времени:
- для интервалов времени менее 200 мс точность должна равняться 20 мс или лучше;
- для интервалов времени от 200 мс до 1 с точность должна равняться 10% или лучше;
- для интервалов времени больше 1 с точность должна равняться 100 мс или лучше.
5.4.3 Процедуры испытаний системы предупреждения о приближающемся транспортном средстве
5.4.3.1 Общие положения
Во время всех последующих испытаний должны соблюдаться все уместные критерии активации.
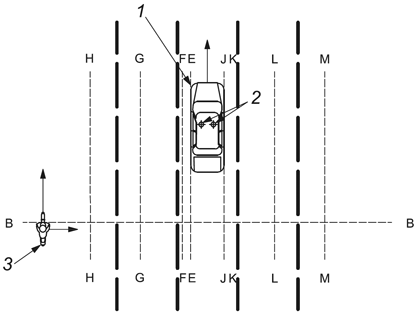
5.4.3.2 Транспортное средство-мишень, обгоняющее транспортное средство
Данное испытание проводят с целью проверки своевременности выдачи предупреждений системой предупреждения о приближающемся транспортном средстве, когда транспортное средство-мишень обгоняет транспортное средство. Испытание необходимо проводить следующим образом (см. рисунок 14 и 5.2).
На ровной испытательной трассе транспортное средство должно двигаться с постоянной скоростью, диапазон которой указан в таблице 8. Испытательное транспортное средство-мишень должно двигаться как показано на рисунке 14 таким образом, чтобы скорость сближения соответствовала диапазону из таблицы 8.
Таблица 8 - Значения скорости для проверки выдачи предупреждений о приближающемся транспортном средстве-мишени, обгоняющем транспортное средство
Классификация скоростей сближения транспортных средств-мишеней | Радиус кривизны, м | Скорость транспортного средства, м/с | Скорость сближения транспортного средства-мишени, м/с |
Тип А | 125 | 7-10 | 7-10 |
Тип В | 250 | 10-13 | 12-15 |
Тип С | 500 | 13-16 | 17-20 |
Оба транспортных средства должны двигаться таким образом, чтобы поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени находилось в диапазоне от 2,0 м до 3,0 м. До начала испытания транспортное средство-мишень должно располагаться позади транспортного средства на расстоянии не менее 150 м.
Когда транспортное средство-мишень приближается и обгоняет транспортное средство, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока расчетное время до столкновения транспортного средства-мишени равно 7,5 с или более;
- система должна инициировать выдачу предупреждения для подходящей стороны транспортного средства не позднее чем через 0,3 с после того, как расчетное время до столкновения транспортного средства-мишени уменьшилось до значения, указанного в таблице 3;
 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - поперечное расстояние; 4 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 14 - Транспортное средство-мишень, обгоняющее транспортное средство
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока передний край транспортного средства-мишени не пересечет линию В;
- система должна прекратить выдачу предупреждения не позднее времени, когда задний край транспортного средства-мишени пересечет линию N, и времени отклика системы, указанного в 4.2.6.
Такое испытание должно повторяться в общей сложности двенадцать раз согласно таблице 9. Для испытаний на криволинейных траекториях радиус кривизны дороги должен равняться значению, указанному в таблице 2, -0%+20%.
В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно шесть испытаний при дневном или ночном освещении.
Таблица 9 - Проверка выдачи предупреждений о приближающемся транспортном средстве-мишени, обгоняющем транспортное средство
| Прямой участок дороги | По кривой слева | По кривой справа | |||
| День | Ночь | День | Ночь | День | Ночь |
Испытательная мишень слева от транспортного средства |
| 2 испытания | 2 испытания |
| 2 испытания |
|
Испытательная мишень справа от транспортного средства | 2 испытания |
|
| 2 испытания |
| 2 испытания |
5.4.3.3 Транспортное средство, обгоняющее транспортное средство-мишень
Данное испытание проводят с целью проверки уместности выдачи предупреждений системой предупреждения о приближающемся транспортном средстве в ситуациях, когда соблюдаются системные требования и транспортное средство обгоняет транспортное средство-мишень. Испытание необходимо проводить следующим образом (см. рисунок 15 и 4.2).
На ровной испытательной трассе транспортное средство-мишень должно двигаться с постоянной скоростью, диапазон которой указан в таблице 10. Транспортное средство должно двигаться, как показано на рисунке 15, таким образом, чтобы скорость обгона соответствовала диапазону из таблицы 10. Оба транспортных средства должны двигаться таким образом, чтобы поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени находилось в диапазоне от 2,0 м до 3,0 м. До начала испытания передний край транспортного средства должен находиться позади заднего края испытательного транспортного средства-мишени.
Таблица 10 - Значения скорости для проверки выдачи предупреждений о приближающемся транспортном средстве, обгоняющем транспортное средство-мишень
Классификация скоростей сближения транспортных средств-мишеней | Радиус кривизны, м | Скорость транспортного средства-мишени, м/с | Скорость обгона транспортного средства, м/с |
Тип А | 125 | 10-15 | 1-5 |
Тип В | 250 | 15-20 | 1-5 |
Тип С | 500 | 20-25 | 1-5 |
Когда транспортное средство приближается и обгоняет транспортное средство-мишень, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью впереди линии N;
- после того, как задний край транспортного средства-мишени пересекает линию N, система может инициировать выдачу предупреждения для подходящей стороны транспортного средства;
- если предупреждение выдано, система должна прекратить выдачу предупреждения не позднее времени, когда передний край транспортного средства-мишени пересечет линию А, и времени отклика системы, указанного в 4.2.6;
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью позади линии А.
Такое испытание должно повторяться в общей сложности двенадцать раз согласно таблице 11. Для испытаний на криволинейных траекториях радиус кривизны дороги должен равняться значению, указанному в таблице 2, -0%+20%. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно шесть испытаний при дневном или ночном освещении.
 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - поперечное расстояние; 4 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 15 - Транспортное средство, обгоняющее транспортное средство-мишень
Таблица 11 - Проверки выдачи предупреждений о приближающемся транспортном средстве, обгоняющем транспортное средство-мишень
| Прямой участок дороги | По кривой слева | По кривой справа | |||
| День | Ночь | День | Ночь | День | Ночь |
Испытательная мишень слева от транспортного средства | 2 испытания |
|
| 2 испытания |
| 2 испытания |
Испытательная мишень справа от транспортного средства |
| 2 испытания | 2 испытания |
| 2 испытания |
|
5.4.3.4 Испытание на ложные предупреждения
Данное испытание проводят с целью проверки отсутствия выдачи системой предупреждений о приближающемся транспортном средстве, когда транспортное средство-мишень и транспортное средство разделяет одна полоса движения. Последовательность испытаний, описанную в 5.4.3.2 и 5.4.3.3, необходимо повторить в модифицированном виде следующим образом. Для каждого испытания поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени должно находиться в диапазоне от 6,5 м до 7,5 м. Система не должна выдавать никаких предупреждений во время проведения этих испытаний.
5.5 Требования, предъявляемые к проверке предупреждения о смене полосы движения
5.5.1 Общие положения
В 4.5.2 и 4.5.3 содержится описание минимальных требований, предъявляемых к испытаниям систем предупреждения о смене полосы движения (система LCDAS типа III).
5.5.2 Измерительная система для проверки выдачи предупреждений о смене полосы движения
Такая измерительная система должна:
- полностью не зависеть от испытываемой системы предупреждения о смене полосы движения;
- измерять продольное расстояние между задним краем транспортного средства и передним краем транспортного средства-мишени, если транспортное средство-мишень находится позади транспортного средства;
- измерять скорость сближения транспортного средства-мишени, если транспортное средство-мишень приближается к транспортному средству сзади;
- измерять продольное расстояние между передним краем транспортного средства и задним краем транспортного средства-мишени, если транспортное средство-мишень находится впереди транспортного средства;
- измерять поперечное расстояние между левым краем транспортного средства и правым краем транспортного средства-мишени, если транспортное средство-мишень находится слева от транспортного средства;
- измерять поперечное расстояние между правым краем транспортного средства и левым краем транспортного средства-мишени, если транспортное средство-мишень находится справа от транспортного средства;
- измерять задержку с момента, когда транспортное средство-мишень соответствует условиям предупреждения, до момента выдачи предупреждения;
- измерять задержку с момента, когда условия предупреждения больше не соблюдаются, до момента прекращения выдачи предупреждения.
Измерительная система должна обеспечивать для всех испытательных процедур следующие точности.
Точность измерения расстояний:
- для расстояний менее 2 м точность должна равняться 0,1 м или лучше;
- для расстояний от 2 м до 10 м точность должна равняться 5% или лучше;
- для расстояний больше 10 м точность должна равняться 0,5 м или лучше.
Точность измерений времени:
- для интервалов времени менее 200 мс точность должна равняться 20 мс или лучше;
- для интервалов времени от 200 мс до 1 с точность должна равняться 10% или лучше;
- для интервалов времени больше 1 с точность должна равняться 100 мс или лучше.
5.5.3 Процедуры испытаний системы предупреждения о смене полосы движения
5.5.3.1 Общие положения
Во время всех последующих испытаний должны соблюдаться все уместные критерии активации.
5.5.3.2 Транспортное средство-мишень, обгоняющее транспортное средство
Данное испытание выполняется с целью проверки своевременности выдачи системой предупреждения о смене полосы движения, когда транспортное средство-мишень обгоняет транспортное средство, и проверки плавности перехода между функцией предупреждения о приближающемся транспортном средстве и функцией предупреждения о непросматриваемых зонах. Испытание необходимо проводить следующим образом (см. рисунок 16 и 4.2).
 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - поперечное расстояние; 4 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 16 - Транспортное средство-мишень, обгоняющее транспортное средство
На ровной испытательной трассе транспортное средство должно двигаться с постоянной скоростью, диапазон которой указан в таблице 12. Испытательное транспортное средство-мишень должно двигаться, как показано на рисунке 16, таким образом, чтобы скорость сближения соответствовала диапазону из таблицы 12.
Оба транспортных средства должны двигаться таким образом, чтобы поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени находилось в диапазоне от 2,0 м до 3,0 м. До начала испытания транспортное средство-мишень должно располагаться позади транспортного средства на расстоянии не менее 150 м.
Таблица 12 - Значения скорости для проверки выдачи предупреждений о смене полосы движения транспортным средством-мишенью, обгоняющем транспортное средство
Классификация скоростей сближения транспортных средств-мишеней | Радиус кривизны, м | Скорость транспортного средства, м/с | Скорость сближения транспортного средства-мишени, м/с |
Тип А | 125 | 7-10 | 7-10 |
Тип В | 250 | 10-13 | 12-15 |
Тип С | 500 | 13-16 | 17-20 |
Когда транспортное средство-мишень приближается и обгоняет транспортное средство, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока расчетное время до столкновения транспортного средства-мишени равно 7,5 с или более;
- система должна инициировать выдачу предупреждения для подходящей стороны транспортного средства не позднее чем через 0,3 с после того, как расчетное время до столкновения транспортного средства-мишени уменьшилось до значения, указанного в таблице 3;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока передний край транспортного средства-мишени не пересечет линию С;
- система должна прекратить выдачу предупреждения не позднее времени, когда задний край транспортного средства-мишени пересечет линию D, и времени отклика системы, указанного в 4.2.6.
Такое испытание должно повторяться в общей сложности 12 раз согласно таблице 13. Для испытаний на криволинейных траекториях радиус кривизны дороги должен равняться значению, указанному в таблице 2, -0%+20%. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно шесть испытаний при дневном или ночном освещении.
Таблица 13 - Проверка выдачи предупреждений о смене полосы движения транспортным средством-мишенью, обгоняющим транспортное средство
| Прямой участок дороги | По кривой слева | По кривой справа | |||
| День | Ночь | День | Ночь | День | Ночь |
Испытательная мишень слева от транспортного средства |
| 2 испытания | 2 испытания |
| 2 испытания |
|
Испытательная мишень справа от транспортного средства | 2 испытания |
|
| 2 испытания |
| 2 испытания |
5.5.3.3 Транспортное средство, обгоняющее транспортное средство-мишень
Данное испытание проводится с целью проверки своевременности выдачи предупреждений системой предупреждения о смене полосы движения, когда транспортное средство обгоняет транспортное средство-мишень. Данное испытание необходимо проводить согласно 5.3.3.3.
5.5.3.4 Испытание на ложные предупреждения
Данное испытание проводят с целью проверки отсутствия выдачи системой предупреждений о смене полосы движения, когда транспортное средство-мишень и транспортное средство разделяет одна полоса движения. Последовательность испытаний, описанную в 5.5.3.2 и 5.5.3.3, необходимо повторить в модифицированном виде следующим образом. Для каждого испытания поперечное расстояние между внешним краем кузова транспортного средства (без учета наружного зеркала заднего вида) и центральной линией транспортного средства-мишени должно находиться в диапазоне от 6,5 м до 7,5 м. Система не должна выдавать никаких предупреждений во время проведения этих испытаний.
5.5.3.5 Транспортное средство-мишень, движущееся поперечно
Данное испытание проводят с целью проверки своевременности выдачи предупреждений системой предупреждения о смене полосы движения, когда транспортное средство-мишень движется сбоку вблизи транспортного средства. Испытание необходимо проводить следующим образом (см. рисунок 17 и 5.2).
 |
1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень, предназначенное для испытаний
Рисунок 17 - Поперечно движущееся транспортное средство-мишень
На прямой ровной испытательной трассе транспортное средство должно двигаться по прямолинейной траектории с минимальной постоянной скоростью 20 м/с. Испытательное транспортное средство-мишень должно двигаться относительно транспортного средства со скоростью, которая позволяет переднему краю транспортного средства-мишени находиться между линией В и транспортным средством на протяжении всего испытания. До начала испытания транспортное средство-мишень должно полностью располагаться слева от линии Н. Транспортное средство-мишень должно двигаться вправо с поперечной скоростью от 0,25 м/с до 0,75 м/с до тех пор, пока оно не окажется полностью справа от линии М. После этого транспортное средство-мишень должно двигаться влево с поперечной скоростью от 0,25 м/с до 0,75 м/с до тех пор, пока оно не окажется полностью слева от линии Н.
Когда транспортное средство-мишень движется слева направо, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью слева от линии Н;
- после пересечения линии Н транспортным средством-мишенью система должна инициировать выдачу предупреждения для левой стороны транспортного средства не позднее времени пересечения правым краем транспортного средства-мишени линии G и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока правый край транспортного средства-мишени не пересечет линию F;
- система должна прекратить выдачу предупреждения не позднее времени, когда левый край транспортного средства-мишени пересечет линию Е, и времени отклика системы, указанного в 4.2.6;
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью между линиями Е и J;
- после пересечения линии J транспортным средством-мишенью система должна инициировать выдачу предупреждения для правой стороны транспортного средства не позднее времени пересечения левым краем транспортного средства-мишени линии K и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока левый край транспортного средства-мишени не пересечет линию L;
- система должна прекратить выдачу предупреждения не позднее времени, когда левый край транспортного средства-мишени пересечет линию М, и времени отклика системы, указанного в 4.2.6.
Когда транспортное средство-мишень движется справа налево, система должна удовлетворять следующим требованиям, предъявляемым к испытаниям:
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью справа от линии М;
- после пересечения линии М транспортным средством-мишенью система должна инициировать выдачу предупреждения для правой стороны транспортного средства не позднее времени пересечения левым краем транспортного средства-мишени линии L и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока левый край транспортного средства-мишени не пересечет линию K;
- система должна прекратить выдачу предупреждения не позднее времени, когда правый край транспортного средства-мишени пересечет линию J и времени отклика системы, указанного в 4.2.6;
- система не должна выдавать никаких предупреждений, пока транспортное средство-мишень находится полностью между линиями Е и J;
- после пересечения линии Е транспортным средством-мишенью система должна инициировать выдачу предупреждения для левой стороны транспортного средства не позднее времени пересечения правым краем транспортного средства-мишени линии F и времени отклика системы, указанного в 4.2.6;
- система должна продолжать выдавать предупреждение по крайней мере до тех пор, пока правый край транспортного средства-мишени не пересечет линию G;
- система должна прекратить выдачу предупреждения не позднее времени, когда правый край транспортного средства-мишени пересечет линию Н, и времени отклика системы, указанного в 4.2.6.
Такое испытание должно повторяться в общей сложности шесть раз согласно таблице 14. В ночных условиях используется только освещение, создаваемое стандартными фарами и задними фонарями транспортного средства и транспортного средства-мишени. Если условия окружающего освещения не влияют на работу системы, испытатель может провести суммарно три испытания при дневном или ночном освещении.
Таблица 14 - Проверка выдачи предупреждений о смене полосы движения для поперечно движущегося транспортного средства-мишени
День | Ночь |
3 испытания | 3 испытания |
Приложение А
(справочное)
Примеры предупреждений о непросматриваемых зонах
Приведенные в таблице А.1 примеры поясняют требования, предъявляемые к выдаче предупреждений о непросматриваемых зонах. Во всех этих примерах транспортное средство-мишень находится слева от транспортного средства. Требования, предъявляемые к выдаче предупреждений для правой стороны, аналогичны требованиям, предъявляемым к предупреждениям левой стороны.
Таблица А.1 - Примеры предупреждений о непросматриваемых зонах
А.1 В этом случае функция предупреждения о непросматриваемых зонах не должна выдавать предупреждение. Транспортное средство-мишень находится полностью за пределами зоны, ограниченной линиями A, D, Е и Н | 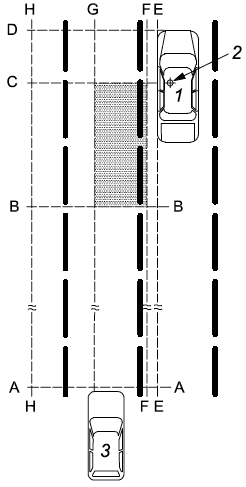 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.1 |
А.2 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Транспортное средство-мишень находится неполностью за пределами зоны, ограниченной линиями A, D, Е и Н | 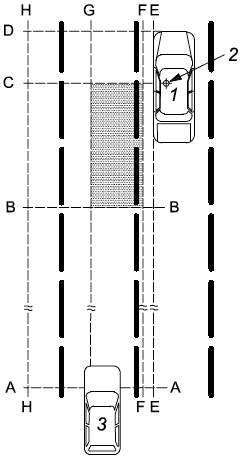 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.2 |
А.3 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Предупреждение не требуется, поскольку никакая часть транспортного средства-мишени не находится впереди линии В | 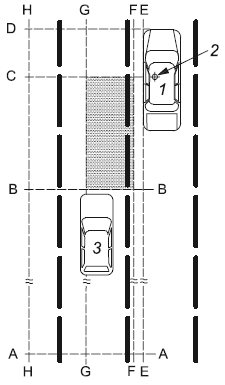 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.3 |
А.4 В этом случае функция предупреждения о непросматриваемых зонах должна выдать предупреждение. Передняя сторона транспортного средства-мишени находится впереди линии В | 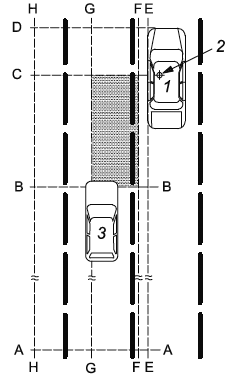 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.4 |
А.5 В этом случае функция предупреждения о непросматриваемых зонах должна выдать предупреждение. Транспортное средство-мишень находится полностью позади линии С | 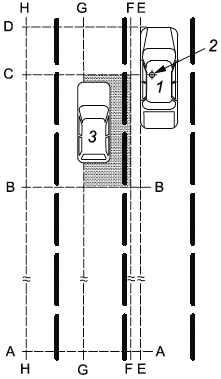 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.5 |
А.6 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Предупреждение не требуется, поскольку транспортное средство-мишень находится неполностью позади линии С | 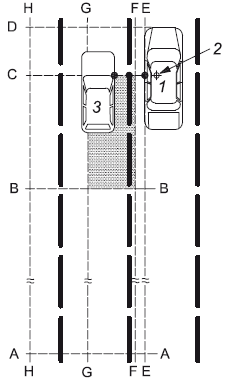 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.6 |
А.7 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Транспортное средство-мишень находится неполностью за пределами зоны, ограниченной линиями A, D, Е и Н | 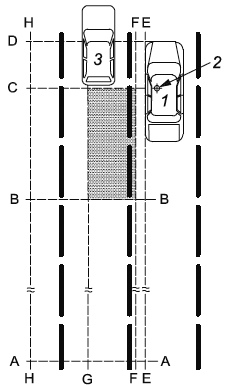 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.7 |
А.8 В этом случае функция предупреждения о непросматриваемых зонах не должна выдавать предупреждение. Транспортное средство-мишень находится полностью за пределами зоны, ограниченной линиями A, D, Е и Н | 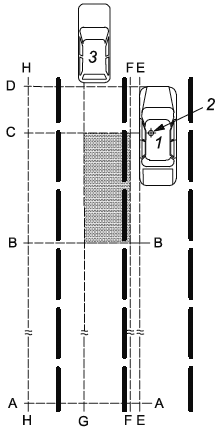 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.8 |
А.9 В этом случае функция предупреждения о непросматриваемых зонах не должна выдавать предупреждение. Транспортное средство-мишень находится полностью за пределами зоны, ограниченной линиями A, D, Е и Н | 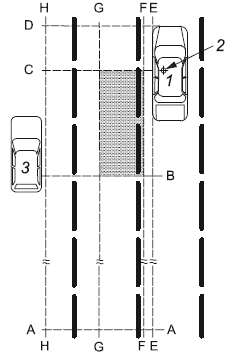 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.9 |
А.10 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Транспортное средство-мишень находится неполностью за пределами зоны, ограниченной линиями A, D, Е и Н | 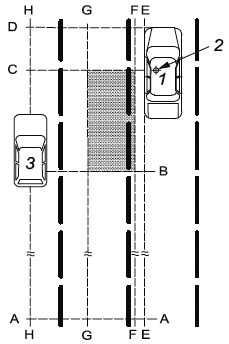 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.10 |
А.11 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Предупреждение не требуется, поскольку никакая часть транспортного средства-мишени не находится справа от линии G | 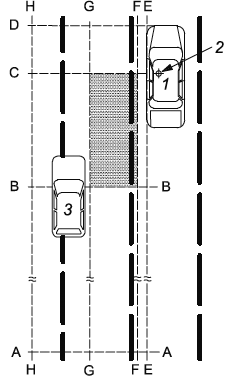 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.11 |
А.12 В этом случае функция предупреждения о непросматриваемых зонах должна выдать предупреждение. Правая сторона транспортного средства-мишени находится справа от линии G | 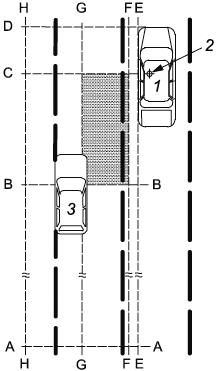 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.12 |
А.13 В этом случае функция предупреждения о непросматриваемых зонах должна выдать предупреждение. Транспортное средство-мишень находится полностью слева от линии F | 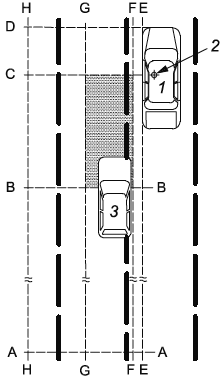 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.13 |
А.14 В этом случае функция предупреждения о непросматриваемых зонах может выдавать предупреждение. Предупреждение не требуется, поскольку транспортное средство-мишень находится неполностью слева от линии F | 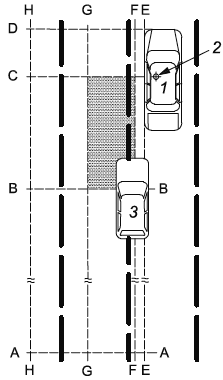 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.14 |
А.15 В этом случае функция предупреждения о непросматриваемых зонах не должна выдавать предупреждение. Транспортное средство-мишень находится полностью за пределами зоны, ограниченной линиями A, D, Е и Н | 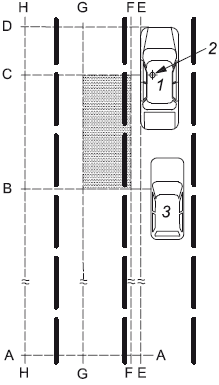 1 - транспортное средство; 2 - центр эллипса 95-го процентиля; 3 - транспортное средство-мишень Рисунок А.15 |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: интеллектуальные транспортные системы, системо-помощи водителю, система удержания полосы движения, методы испытания систем | |
