ПНСТ 347-2018
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СИСТЕМЫ СИГНАЛИЗАЦИИ И ПРЕДУПРЕЖДЕНИЯ НАРУШЕНИЙ НА ПЕРЕКРЕСТКАХ
Требования к эксплуатационным характеристикам и процедурам испытаний
Intelligent transport systems (ITS) - Cooperative intersection signal information and violation warning systems (CIWS) - Performance requirements and test procedures
ОКС 35.240.60
Срок действия с 2019-06-01
до 2022-06-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Научно-исследовательский институт интеллектуальных транспортных систем" (ООО "НИИ ИТС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 31 декабря 2018 г. N 79-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 26684-2015* "Интеллектуальные транспортные системы. Системы сигнализации и предупреждения нарушений на перекрестках. Требования к эксплуатационным характеристикам и процедурам испытаний" (ISO 26684-2015 "Intelligent transport systems (ITS) - Cooperative intersection signal information and violation warning systems (CIWS) - Performance requirements and test procedures", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: Россия, 105005, Москва, пер. Армянский, д.9, стр.1 и в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
1 Область применения
Настоящий стандарт определяет концепцию работы, системных требований и методов испытаний для информации о совместном сигнале пересечения и системах предупреждения о нарушении (CIWS) на сигнализированных пересечениях. CIWS предназначены для снижения вероятности травмирования, повреждения и летального исхода, повышая способность водителей избегать аварийных ситуаций на сигнальных перекрестках.
Объем стандартизации CIWS включает основные функции, функциональные требования, требования к производительности, информационное наполнение и методы тестирования.
Характеристики технологий, используемых для связи между контроллером сигналов и транспортным средством (ТС), не рассматриваются в настоящем стандарте, включая поведенческие ответы водителей и различные возможности ТС на дороге или множество комбинаций этих двух характеристик.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
Примечание - Время для достижения остановки линии пересечения, вычисляемое по формуле
2.4 фаза сигнала для транспортного потока (traffic signal phase): Зеленые, желтые и красные интервалы в цикле, которые назначаются независимому движению или комбинации движений.
2.5 стоп-линия (stop line): Маркировка дорожной разметки, проходящая по дорожкам подхода, для того чтобы указать точку, в которой предполагается или требуется остановка.
2.6 дорожное оборудование (road side equipment); RSE: Придорожное устройство, посредством которого можно передавать информацию о сигналах движения приближающегося транспортного средства и определять его положение.
2.7 бортовое оборудование (onboard equipement): Расположенное внутри транспортного средства оборудование, которое может предоставить водителям информацию и/или предупредить на основе полученной от RSE и транспортного средства информации о текущей ситуации.
2.8 спотовые места связи (spot communication media): Система беспроводной связи между придорожным устройством и транспортным средством, которая работает в ограниченной зоне, поэтому доступность линии связи может служить в качестве окончательного индикатора местоположения транспортного средства в поддержку предполагаемого применения.
3 Обозначения
В настоящем стандарте использованы следующие обозначения:
CIWS - система предупреждения о нарушении;
Примечание - Расположение RSE ограничено физическими условиями дороги. Если RSE расположено выше по потоку, оно может передавать информацию согласно срокам, необходимым для предупреждения, и вычисляется по формуле
4 Классификация
4.1 Конфигурация системы
Конфигурация системы приведена на рисунке 1.
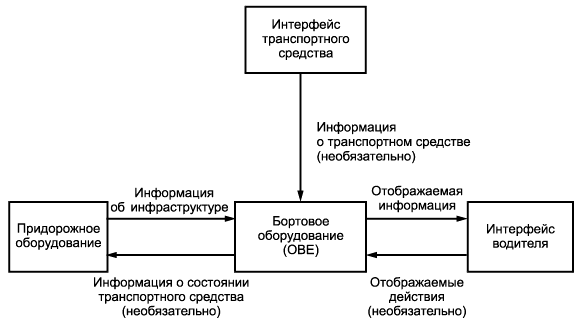 |
Рисунок 1 - Конфигурация системы
4.2 Классификация системы
Для того чтобы уменьшить вероятность получения травмы, повреждения и летального исхода и повысить способность водителей для принятия мер во избежание аварийных ситуаций на сигнальных перекрестках, приложение CIWS должно классифицироваться, как показано в таблице 1.
Системы класса I предназначены для информирования о текущей фазе сигнала трафика для повышения информированности водителя о состоянии сигнала. Системы класса II предназначены для того, чтобы предупредить водителя о неизбежном нарушении дорожного движения в целях повышения реагирования водителя в сложившейся ситуации. Системы класса III рассматривают предполагаемые проблемы и предназначены для включения функции автоматического управления тормозом для уменьшения нарушений, связанных с игнорированием красного сигнала светофора невнимательными водителями (см. таблицу 1).
Таблица 1 - Классификация приложений CIWS
Класс | Функция | Цель | Поддержка водителя | Информация об инфраструктуре | Информация о транспортном средстве | Объем |
I | Информация | Предоставление информации | Текущее состояние сигналов светофора | Сигнальная фаза (зеленый/желтый/красный) по направлению | Направление поездки | Да |
| Время смены сигнала | Сигнальная фаза и синхронизация по направлениям | Направление поездки | Будущий выпуск | ||
II | Предупреждение | Избегание нарушения | Предупреждение о нарушении сигнала | Сигнальная фаза и синхронизация по направлениям | Направление поездки, местоположение, скорость, TTAI | Да |
III | Контроль | Избегание нарушения | Принудительное торможение или автоматическая остановка | Сигнальная фаза и синхронизация по направлениям | Направление поездки, местоположение, скорость, TTAI | Будущий выпуск |
5 Функциональные требования
5.1 Диаграмма состояния CIWS
CIWS должны, как минимум, работать в соответствии с диаграммами состояний, представленными на рисунках 2 и 3.
 |
Рисунок 2 - Диаграмма состояния системы - информация о классе I
 |
Рисунок 3 - Диаграмма состояния системы - предупреждение класса II
5.1.1 CIWS состояния
5.1.1.1 CIWS состояния
Состояние, в котором RSE неактивно.
5.1.1.2 RSE активно
Состояние, в котором RSE активно и отправляет информацию о фазе сигнала.
5.1.1.3 OBE неактивно
Состояние, в котором OBE неактивно.
5.1.1.4 OBE активно
а) Состояние, в котором OBE активно: условия предоставления информации выполнены, и система может предоставить информацию для водителя (класс I).
б) Условия предупреждения соблюдены, и система может предупредить водителя (класс II).
Состояние предупреждения
Состояние, в котором выполняются требования по предупреждению. В этом состоянии должно быть выдано предупреждение для интерфейса человеко-машинного интерфейса (HMI), которое может разрешать приоритеты относительно других предупреждений.
Отсутствие предупреждающего состояния
Состояние, в котором система не будет предупреждать водителя, так как требования по предупреждению не выполняются.
5.2 Критерии перехода
5.2.1 Критерий (1): активация RSE
Когда оператор или автоматическая система включает RSE, оно становится активным.
5.2.2 Критерий (2): деактивация RSE
Когда оператор RSE или автоматическая система отключает RSE, для того чтобы прекратить работу системы из-за сбоев и обслуживания и т.д., она становится неактивной.
5.2.3 Критерий (3): активация OBE
OBE становится активным, когда включается переключатель принадлежности/зажигания. В системах с дополнительным переключателем ON/OFF OBE становится активным, когда этот переключатель включен. Переход OBE к активному состоянию возобновляется в тот момент, когда заканчивается период отказа.
5.2.4 Критерий (4): деактивация OBE
OBE становится неактивным, когда выключатель принадлежности/зажигания выключен или во время периодов отказа. В системах с опциональным переключателем ON/OFF OBE становится неактивным, когда этот выключатель принадлежности/зажигания выключен.
5.2.5 Критерий (5) класса II: активация предупреждения
В классе II предупреждение должно быть указано при прохождении таких области или времени, в которых требуются предупреждения на основе приема информации, поступающей от RSE. Решение о предупреждении зависит от критериев, указанных в 5.5.3.
5.2.6 Критерий (6) класса II: деактивация предупреждения
Предупреждение должно быть прекращено при прохождении линии остановки или после того, как критерии предупреждения больше не выполняются: например, ТС остановилось, поэтому отсутствует угроза нарушения. Положение линии остановки содержится в сообщении, отправленном RSE или сохраненном в базе данных карты ТС.
5.3 Функциональные требования OBE
5.3.1 Получение информации о направлении движения
Направление движения ТС должно быть получено с использованием функции определения его местоположения, например предоставляемой глобальными навигационными спутниковыми системами (GNSS), или на основе информации, получаемой посредством RSE.
5.3.2 Получение информации о позиции транспортного средства
Положение ТС должно быть получено с помощью функции определения местоположения, такой как предоставляет GNSS, или на основе информации, предоставляемой RSE.
5.3.3 Получение скорости транспортного средства
Скорость ТС должна быть зафиксирована датчиками на его борту.
5.3.4 Идентификация согласно информации о сигнале светофора
Информация о состоянии дорожного сигнала перед ТС должна быть идентифицирована на основе информации, предоставляемой RSE.
5.3.5 Решение о необходимости предупреждения (класс II)
Решение о выдаче предупреждения и его содержимого будет основано на оценочной фазе сигнала в момент прибытия ТС на перекресток, а также на положении и скорости ТС.
5.3.6 Сроки вывода предупреждений
Восприятие и время реакции водителя должны быть учтены при запуске предупреждения.
5.3.7 Сроки окончания предупреждения
Предупреждение прекращается в связи с ненужностью, что может быть вызвано работой водителя, положением и скоростью ТС, состоянием транспортного сигнала и т.п., либо по истечении заданного времени вывода предупреждения.
5.3.8 Отображение содержимого человеко-машинного интерфейса
Оборудование человеко-машинного интерфейса должно правильно отображать содержимое предупреждения.
5.4 Функциональные требования RSE
RSE должно быть установлено в зоне пересечения в соответствии с типом линий связи, используемых системой, и подключено к контроллеру сигнала на перекрестке для приема данных о времени и статусе сигнала контроллера.
5.4.1 Наборы данных
Наборы данных должны быть снабжены разрешением и точностью, достаточными для обеспечения производительности системы: например, фаза сигнала (класс I) и положение стоп-линии (класс II), фаза сигнала в направлении, пройденном ТС, оставшееся время фазы сигнала и следующая фаза сигнала.
5.4.2 Диапазон связи
RSE должно иметь диапазон связи, достаточный для обеспечения производительности системы при движении ТС с расчетной скоростью.
5.4.3 Задержка связи
5.5 Производительность CIWS
5.5.1 Возможности системы CIWS
Оборудование OBE в CIWS будет использовать информацию, переданную оборудованием RSE, для того чтобы определить, следует ли направлять предупреждение или соответствующую информацию. Передаваемая информация должна включать в себя статус сигнала трафика и/или время и место остановки сигнала трафика или информацию о расстоянии.
RSE будет транслировать периодическое беспроводное сообщение, которое идентифицирует сигнал трафика и его точное местоположение. В сообщении указаны текущая фаза сигнала и направление движения, соответствующее этой информации. Кроме того, в сообщении могут быть определены следующая фаза для сигнала трафика, а также время, длящееся до тех пор, пока эта фаза не изменится.
OBE получит беспроводное сообщение от RSE и проведет вычисления, для того чтобы определить, должны ли генерироваться предупреждение или информация. В сочетании с информацией о местоположении, фазе и/или времени сигнала трафика OBE может отображать информацию о статусе сигнала или использовать информацию относительно местоположения, заголовка, скорости и ускорения ТС для оценки вероятности нарушения фазы сигнала трафика при вводе сигнала "Перекресток". При расчетах также может быть использована информация о дорожных условиях, поступающая по сигналу трафика через RSE или из другого источника, для настройки работы алгоритма решения.
5.5.2 Предоставление информации
5.5.2.1 Предоставление информации водителям
В системе предусмотрено достаточное количество способов предоставления водителям информации. Однако в настоящем стандарте основное внимание уделяется сообщениям OBE, которые будут использованы для предоставления водителю данных о текущем состоянии сигналов светофора (класс I) или предупреждающих сигналов (класс II).
5.5.2.2 Индикация вне порядка
В случае сбоя системы, обнаруженного OBE, водитель должен быть проинформирован о том, что система не может предоставить необходимую информацию.
5.5.3 Предупреждающий порог для нарушения сигнала
Когда спот-среда связи используется RSE, информация с данного оборудования недоступна. Как следствие, возможны две конфигурации системы.
5.5.3.1 Системы, для которых предупреждение может быть активировано в любое время при подходе ТС к пересечению
Таблица 2 - Условия активации предупреждения относительно TTAI
Время | Класс II | Значение информации |
Предупреждение отсутствует | Зеленый сигнал впереди (необязательно) | |
Предупреждение о нарушении сигнала (необязательно) | Изменение сигнала - внимание и/или снижение скорости | |
Предупреждение о нарушении сигнала | Красный свет работает - остановка |
Любое предупреждение прекращается, если оно считается ненужным с учетом положения/состояния ТС.
Эта система не должна устанавливаться на тех пересечениях, на которых применяется управление сигналом со сменными сигналами.
5.5.3.2 Системы, для которых предупреждение может быть активировано только в месте получения точечного сообщения от RSE
Время | Класс II | Значение информации |
Предупреждение отсутствует | Впереди зеленый сигнал (дополнительно) | |
Предупреждение о нарушении сигнала (необязательно) | Смена сигнала - внимание | |
Предупреждение о нарушении сигнала | Смена сигнала - стоп | |
Предупреждение о нарушении сигнала | Работает краный* сигнал - остановка |
Предупреждение должно быть активировано в соответствии с данными таблицы 2 или 3.
Любое предупреждение прекращается, если оно считается ненужным с учетом положения/состояния ТС.
Примечания
Эта система не должна устанавливаться на тех перекрестках, на которых применяется управление сигналом с изменением времени сигнала.
6 Требования к тестированию
6.1 Испытательное транспортное средство
Испытательное ТС должно быть оборудовано устройством для записи выходов CIWS в зависимости от времени и положения ТС.
6.2 Тестовый сайт
6.2.1 Условия окружающей среды
Испытательный участок должен находиться на плоском, сухом асфальте или бетонной поверхности. Температура окружающей среды во время испытаний должна находиться в пределах (10±30)°C.
6.2.2 Геометрические условия
Испытательный участок должен быть установлен на сигнальном перекрестке, который не должен находиться на дороге общего пользования.
6.3 Процедура тестирования
В следующих пунктах приведены минимальные требования к тестированию для информации о сигналах и системе предупреждения о нарушениях (классы I и II).
6.3.1 Метод тестирования
6.3.1.1 Предупреждающие тесты
Установка порога предупреждения в соответствии с приближающейся скоростью транспортного средства
Целью этого теста является проверка того, что CIWS в ТС предоставляет как информацию для класса I, так и предупреждение для класса II при необходимости, в момент приближения к перекрестку. Испытание проводят следующим образом.
Порог предупреждения должен быть установлен, как описано в 5.5.3.
Предупреждение, выданное на основании данных таблицы 3
Предупреждение, выданное на основании данных таблицы 2
6.3.1.2 Тестовый забег
Это испытание должно быть выполнено в соответствии с условиями, указанными в таблице 4.
Таблица 4 - Условия тестового прогона
Скорость объекта транспортного средства | Класс I: информация | Класс II: предупреждение |
Один проход (передача или сбой по информации) | Два прогона: одно из предупреждающих действий - условие и одно из неактивных состояний (пропустить или сбой по предупреждению) |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: интеллектуальные транспортные системы, электронный сбор платы за проезд, архитектура систем сбора платы за проезд, бортовое оборудование | |
