ГОСТ Р 58837-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Автомобильные транспортные средства
СИСТЕМЫ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
Общие принципы проектирования
Motor vehicles. Automated control systems. General principles for design
ОКС 35.240.60
Дата введения 2021-04-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 056 "Дорожный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 2 октября 2020 г. N 738-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Системы автоматизированного управления предназначены для частичного либо полного решения задач управления транспортными средствами категорий М и N согласно [1], обладающих уровнями автоматизации 1-5 по ГОСТ Р 58823, и принятия своевременных решений по применению управляющих воздействий (водителем или автоматически, в зависимости от уровня автоматизации и окружающих условий) на органы управления рассматриваемого транспортного средства, в частности рулевого управления, управления скоростью, а при необходимости - для автоматического устранения допущенных водителем ошибок при осуществлении управляющих воздействий с целью повышения безопасности дорожного движения.
Системы автоматизированного управления осуществляют следующие функции:
- информирование водителя рассматриваемого транспортного средства, оснащенного системой автоматизированного управления уровней автоматизации 1-4 в соответствии с ГОСТ Р 58823, о наличии на требуемом направлении движения подвижных и неподвижных препятствий, предупреждение о действующих для рассматриваемого транспортного средства дорожных знаках, сигналах светофора и линиях дорожной разметки, требования которых необходимо учесть для соблюдения [2] и обеспечения безопасности дорожного движения;
- при несоблюдении водителем рассматриваемого транспортного средства, оснащенного системой автоматизированного управления уровней автоматизации 1-4 в соответствии с ГОСТ Р 58823, данных предписаний и требований или при выявлении предпосылок к совершению дорожно-транспортных происшествий, обусловленных действиями или бездействием водителя рассматриваемого транспортного средства и/или других водителей, - изменение скорости и/или направления движения рассматриваемого транспортного средства для достижения состояния минимального риска;
- для систем автоматизированного управления уровня 5 в соответствии с ГОСТ Р 58823 обеспечение решения всех задач управления рассматриваемым транспортным средством в любых дорожных, географических, климатических и прочих условиях, при которых водитель был бы способен эффективно и безопасно управлять рассматриваемым транспортным средством.
Системы автоматизированного управления уровней автоматизации 1-4 функционируют в рамках ограничений, определенных в ГОСТ Р 58823, и не освобождают водителя от обязанности контролировать дорожную обстановку. Ответственность за безопасность движения несет водитель. На таких транспортных средствах водитель постоянно должен быть готов принять на себя решение задач управления рассматриваемым транспортным средством во избежание дорожно-транспортных происшествий.
Главным критерием при разработке новых систем и технологий является повышение уровня безопасности и удобства в использовании этих систем. В настоящем стандарте определены базовые принципы для проектирования и разработки систем автоматизированного управления транспортными средствами.
Системы активной безопасности транспортных средств являются переходной стадией, необходимой для апробации подсистем, входящих в состав систем автоматизированного управления уровней автоматизации 1-4 в соответствии с ГОСТ Р 58823, перед их применением в системах автоматизированного управления с уровнем автоматизации 5 (полная автоматизация задачи управления движением). Переход к системе уровня автоматизации 5 рекомендуется осуществлять не ранее, чем каждая из входящих в ее состав подсистем будет протестирована, внедрена и апробирована в процессе массовой эксплуатации транспортных средств с системами автоматизированного управления с уровнями автоматизации 1-4.
В случаях, когда управление рассматриваемым транспортным средством вызывает у системы автоматизированного управления уровней автоматизации 1-4 в соответствии с ГОСТ Р 58823 затруднения либо возникают сомнения в ее способности осуществить задачи управления при соблюдении всех условий безопасности дорожного движения в сложившейся дорожной обстановке, система автоматизированного управления должна выдать запрос водителю или пользователю, готовому к осуществлению резервного варианта выполнения задачи управления, для выполнения им задач управления. Для анализа подобных ситуаций целесообразно регистрировать подобные ситуации в бортовом устройстве регистрации событий рассматриваемого транспортного средства и, при наличии согласия пользователя, передавать информацию о них в дилерские сервисные центры для последующего анализа разработчиками систем автоматизированного управления и систем активной безопасности.
Приведенные в настоящем стандарте принципы относятся преимущественно к системам автоматизированного управления в целом, а не к ее конкретным подсистемам или компонентам. Если приведенные положения будут противоречить принципам, приведенным в стандартах на отдельные подсистемы и компоненты систем автоматизированного управления, то при проектировании следует руководствоваться последними.
1 Область применения
Настоящий стандарт устанавливает общие принципы проектирования бортовых систем автоматизированного управления, включающих системы автоматизации управления движением (далее - САУД) и автоматические системы управления движением (далее - АСУД), а также систем активной безопасности (далее - САБ) или их подсистем, устанавливаемых на транспортные средства (далее - ТС) категорий М и N согласно [1], обладающие уровнями автоматизации 1-5 задачи управления движением (далее - ЗУД).
Примечание - Уровни автоматизации - в соответствии с ГОСТ Р 58823.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие документы:
ГОСТ 15150 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 33991 Электрооборудование автомобильных транспортных средств. Электромагнитная совместимость. Помехи в цепях. Требования и методы испытаний
ГОСТ Р 50607 (ИСО 10605:2008) Совместимость технических средств электромагнитная. Транспорт дорожный. Методы испытаний для электрических помех от электростатических разрядов
ГОСТ Р 51318.25 (СИСПР 25:2008) Совместимость технических средств электромагнитная. Транспортные средства, моторные лодки и устройства с двигателями внутреннего сгорания. Характеристики индустриальных радиопомех. Нормы и методы измерений для защиты радиоприемных устройств, размещенных на подвижных средствах
ГОСТ Р 56205/IEC/TS 62443-1-1:2009 Сети коммуникационные промышленные. Защищенность (кибербезопасность) сети и системы. Часть 1-1. Терминология, концептуальные положения и модели
ГОСТ Р 58497 (ИСО 15008:2017) Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению визуальной информации внутри транспортного средства и методы проверки их выполнения
ГОСТ Р 58804 Автотранспортные средства. Системы удержания транспортного средства в занимаемой полосе движения. Общие технические требования и методы испытаний
ГОСТ Р 58823-2020 Автомобильные транспортные средства. Системы автоматизации управления движением. Классификация и определения
ГОСТ Р 58824 Автомобильные транспортные средства. Системы адаптивного круиз-контроля. Общие технические требования и методы испытаний
ГОСТ Р 58834-2020 Автомобильные транспортные средства. Бортовые системы помощи водителю. Общие технические требования к компонентам и методы испытаний
ГОСТ Р 58839 Автомобильные транспортные средства. Системы опережающего экстренного торможения. Общие технические требования и методы испытаний
ГОСТ Р ИСО 15006 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению звуковой информации внутри транспортного средства
СП 34.13330 "СНиП 2.05.02-85* Автомобильные дороги"
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов (сводов правил) в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный документ, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого документа с учетом всех внесенных в данную версию изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то рекомендуется использовать версию этого документа с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку. Сведения о действии сводов правил целесообразно проверить в Федеральном информационном фонде стандартов.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 58823, а также следующие термины с соответствующими определениями:
3.1 автоматическая система управления движением; АСУД: Аппаратные и программные средства, которые в совокупности способны выполнять всю ЗУД в длительном режиме вне зависимости от того, ограничена ли она конкретными условиями эксплуатации.
Примечания
1 Данный термин используется при описании систем автоматизации управления движением уровней автоматизации 3-5.
2 В отличие от АСУД, общий термин "система автоматизации управления движением; САУД" (см. 3.28) подразумевает систему или функцию любого уровня автоматизации от 1 до 5, которая выполняет ЗУД или ее часть в длительном режиме.
3 Уровни автоматизации 1-5 - согласно ГОСТ Р 58823.
3.2 аудиопредупреждения: Предупреждающие сообщения САБ, САУД или АСУД (тональные сигналы и голосовые сообщения), предназначенные для восприятия органами слуха водителя или пользователя рассматриваемого ТС.
3.3 визуальные сообщения: Предупреждающие сообщения, предназначенные для восприятия органами зрения водителя или пользователя рассматриваемого ТС.
3.4 вовлеченность водителя (пользователя) в процесс управления: Ситуация, при которой водитель (пользователь) рассматриваемого ТС непосредственно участвует в процессе управления и понимает состояние рассматриваемого ТС, воспринимает и анализирует дорожную обстановку, а также играет активную роль в системе "водитель - ТС", принимая решения и в случае необходимости реагируя на возникающие ситуации путем воздействия (непосредственно или посредством человеко-машинного интерфейса) на органы управления рассматриваемого ТС во избежание дорожно-транспортных происшествий.
3.5
вред здоровью (harm): Нанесение физической травмы или причинение ущерба здоровью человека. [ГОСТ ISO 12100-2013, пункт 3.5] |
3.6 второстепенная информация: Сведения, передаваемые водителю или пользователю рассматриваемого ТС САБ, САУД, АСУД или их подсистемами, не влияющие в условиях данной дорожной обстановки на безопасность дорожного движения.
3.7 голосовые сообщения: Аудиопредупреждения, представляющие собой речевые сообщения, созданные путем имитации или записи голоса человека.
3.8 графические сообщения: Визуальные сообщения, представляющие собой схематичные графические или видеоизображения рассматриваемого ТС и целевых объектов, находящихся в зоне контроля САБ, САУД или АСУД рассматриваемого ТС.
3.9 двухрежимное транспортное средство: Тип ТС, оснащенного АСУД, которое предназначено как для беспилотного функционирования, так и для управления обычным водителем на протяжении всей поездки.
Примечание - Определение "обычный водитель" - согласно ГОСТ Р 58823.
3.10 диспетчер (транспортного средства, оснащенного АСУД): Пользователь(и), который(ые) контролирует(ют) готовность ТС, оснащенного АСУД, к работе, а также активирует(ют) и деактивирует(ют) АСУД.
Примечания
1 Диспетчера не следует отождествлять с удаленным водителем, хотя диспетчер может стать удаленным водителем, если у него есть средства для дистанционного управления рассматриваемым ТС.
2 Диспетчер может задавать начальный, конечный и промежуточные пункты следования ТС, если они не предустановлены в программе АСУД.
3 Контроль готовности к работе включает в себя визуальный контроль работоспособности и чистоты систем ТС, а также проверку отсутствия сигналов систем самодиагностики ТС и АСУД, предупреждающих о системных сбоях, связанных с выполнением ЗУД.
3.11 дорожная обстановка: Совокупность:
- подвижных и неподвижных целевых объектов, находящихся в зоне контроля САБ, САУД или АСУД, с учетом направления и скорости их движения (если применимо) относительно направления и скорости движения рассматриваемого ТС;
- объектов дорожной инфраструктуры, таких как дорожные знаки, светофоры, шлагбаумы, линии разметки, разделительные барьеры и т.п., предписывающих разрешенные скорость, направление и режимы движения рассматриваемого ТС;
- погодных и сезонных условий, включающих время года, видимость, осадки, направление ветра и т.п.;
- дорожных условий, дорожных покрытий: сухое, влажное, обводненное, обледеневшее, со снежным накатом, поврежденное, с дефектами, со слабой несущей способностью; угол уклона дороги и т.п.
3.12 зона контроля: Область пространства, находящаяся перед передней либо за задней кромкой РТС, на которую распространяются дальность действия и угол обзора компонентов обнаружения САБ, САУД, АСУД или водителя рассматриваемого ТС.
3.13 зона предупреждения: Участок зоны контроля, располагающийся на требуемом направлении движения рассматриваемого ТС, при движении по которому САБ, САУД или АСУД должны предупреждать водителя рассматриваемого ТС о целевых ТС при условии, что их скорости и/или направление движения создают препятствия для продолжения движения рассматриваемого ТС.
3.14 компонент обнаружения; КО: Составная часть подсистемы обнаружения САБ, САУД или АСУД рассматриваемого ТС, осуществляющая функции выявления целевых объектов, находящихся в пределах дорожной обстановки вокруг рассматриваемого ТС.
Примечание - К КО относятся видеокамеры, радары, лидары, ультразвуковые датчики и т.п.
3.15 контроль водителя над действиями САУД: Действия водителя, выполняемые при управлении рассматриваемым ТС с активной САУД уровня автоматизации 1 или 2 для отслеживания характеристик этой функции, реагирования на ненадлежащие действия, предпринятые этой функцией, и для завершения выполнения ЗУД.
Примечание - Уровни автоматизации 1, 2 - согласно ГОСТ Р 58823.
3.16 механическое транспортное средство: ТС, приводимое в движение двигателем.
Примечание - См. [2].
3.17 мониторинг: Общий термин, относящийся к ряду функций, включающих в себя определение состояния водителя (пользователя) или рассматриваемого ТС в реальном времени и обработку полученных данных для управления рассматриваемым ТС или поддержания его работы.
Примечания
1 Нижеследующие термины, описывающие типы мониторинга, следует применять, когда общий термин "мониторинг" и его производные недостаточно точны.
2 Типы мониторинга описывают следующие четыре термина:
- мониторинг водителя (пользователя);
- мониторинг дорожной обстановки;
- мониторинг работы ТС;
- мониторинг работы АСУД, САУД или САБ.
3 Состояние водителя или состояние его восприимчивости к сигналам тревоги и другим событиям, таким как отказы и неисправности САБ, САУД, АСУД или ТС, влияющие на эффективность выполнения ЗУД, предусмотренные на уровне автоматизации 3, не являются формой мониторинга.
3.18 неисправность САБ, САУД или АСУД: Устойчивое состояние одной из этих систем, характеризующееся невозможностью осуществления части или всех ее функций, в том числе по причине снижения их производительности, продолжающееся до осуществления ремонтных или сервисных воздействий.
3.19 нормальные условия управления: Ситуации, возникшие в процессе дорожного движения, в которых не требуются незамедлительные действия со стороны водителя или пользователя рассматриваемого ТС или активация соответствующих функций САБ, САУД или АСУД для предотвращения или смягчения последствий дорожно-транспортного происшествия.
3.20 объект инфраструктуры; ОИ: Устройство или оборудование (дорожный знак, линии дорожной разметки, светофоры), предназначенные для регулирования движения транспортного потока на оборудованных автомобильных дорогах, подлежащие обнаружению и распознаванию соответствующими подсистемами САУД или АСУД.
Примечание - Дорожные знаки - согласно [2].
3.21 опасность для движения: Ситуация, возникшая в процессе дорожного движения, при которой продолжение движения рассматриваемого ТС в том же направлении и с той же скоростью создает угрозу совершения дорожно-транспортного происшествия.
Примечание - См. [2].
3.22 поездка: Самостоятельное движение рассматриваемого ТС от пункта отправления до пункта назначения (с водителем или без него).
3.23 предупреждающие сообщения: Сообщения подсистем предупреждения или диагностики САБ, САУД уровней автоматизации 1-4 или АСУД, выдающиеся водителю при необходимости его вмешательства в управление рассматриваемым ТС либо для обращения его внимания на целевые объекты, представляющие потенциальную либо явную угрозу для продолжения требуемого направления движения рассматриваемого ТС с текущей скоростью.
Примечание - Уровни автоматизации 1-4 - согласно ГОСТ Р 58823.
3.24 рассматриваемое транспортное средство; РТС: Механическое ТС, оснащенное САБ, САУД или АСУД, обладающее уровнем автоматизации 1-5.
Примечание - Уровни автоматизации 1-5 - согласно ГОСТ Р 58823.
3.25
риск (risk): Сочетание вероятности нанесения и степени тяжести возможных травм или другого вреда здоровью. [ГОСТ ISO 12100-2013, пункт 3.12] |
3.26 сбой: Состояние САБ, САУД, АСУД или РТС, характеризующееся временной полной или частичной утратой работоспособности или производительности системы или ее компонентов, продолжающейся до завершения объективного события, вызвавшего это состояние (например, помехи радару или блика, воздействующего на видеокамеру), либо до следующего включения или активации системы (например, после выключения и включения зажигания), либо до действий водителя или пользователя РТС по устранению данного состояния.
3.27
система активной безопасности; САБ: Система транспортного средства, которая осуществляет мониторинг внутренних и внешних параметров транспортного средства для того, чтобы выявить существующие и потенциальные опасности для транспортного средства, его пассажиров и/или других участников дорожного движения и автоматически вмешаться с тем, чтобы избежать или уменьшить последствия потенциальных столкновений, используя различные методы, которые включают предупреждение водителя, перенастройку или активное управление подсистемами транспортного средства (тормозами, топливоподачей, подвеской и т.д.). [ГОСТ Р 58823-2020, статья 2.1] |
Примечание - В настоящем стандарте системы, которые соответствуют определению "система активной безопасности", имеют своим назначением прежде всего повышение безопасности. Системы активной безопасности предупреждают или вмешиваются только в случае опасной ситуации или маневра, совершаемого водителем (обычным или удаленным).
3.28 система (технология) автоматизации управления движением; САУД: Аппаратные и программные средства систем автоматического управления движением уровней 1-5, которые в совокупности способны выполнять всю ЗУД или ее часть в длительном режиме.
3.29 тактильные сигналы: Предупреждающие сообщения, представляющие собой осязательные воздействия на водителя РТС, передающиеся через органы управления РТС либо сиденье водителя.
3.30 текстовые сообщения: Визуальные сообщения, содержащие текст.
3.31 тональные сигналы: Аудиопредупреждения, представляющие собой один или несколько простых звуков с фиксированным составом частот, различающихся по тональности, громкости или частоте повторений.
3.32 транспортное средство; ТС: Устройство на колесном ходу категории L, М, N, О, предназначенное для перевозки людей, грузов или оборудования, установленного на нем.
Примечание - См. [3].
3.33 требуемое направление движения; ТНД: Запланированное водителем (либо САБ, САУД или АСУД) направление движения РТС, распознаваемое САБ, САУД или АСУД по заблаговременному включению соответствующего указателя поворота, отсутствию такого включения либо изменяемому и/или сохраняемому углу поворота рулевого колеса.
Примечание - Указатели поворота - согласно [2], пункт 8.1.
3.34 целевое транспортное средство; ЦТС: ТС (мотоцикл, легковой автомобиль, грузовой автомобиль, автобус), находящееся в зоне(ах) контроля САБ, САУД или АСУД РТС.
3.35 целевой объект; ЦО: Пешеход, велосипедист, ЦТС, находящиеся в неподвижном состоянии или движущиеся, а также объекты инфраструктуры, стационарные здания, сооружения и прочие препятствия при их нахождении в зоне(ах) контроля САБ, САУД или АСУД.
3.36 эксплуатация в автономном режиме: Эксплуатация оснащенного АСУД ТС, в котором отсутствует водитель.
4 Сокращения
В настоящем стандарте использованы следующие сокращения:
БУ - блок управления САБ, САУД или АСУД;
БДД - безопасность дорожного движения;
ВК - видеокамера;
ДТП - дорожно-транспортное происшествие;
ИТО - информационное и телекоммуникационное оборудование;
МО - материальные объекты;
ПО - программное обеспечение;
ПС - подсистема САБ, САУД или АСУД;
РЗЛ - левый задний радар;
РЗП - правый задний радар;
РНС - реакция на нештатные ситуации;
РРОС - распознавание и реагирование на объекты и события;
РФ - радар фронтальный;
УА - уровень автоматизации;
УЭ - условия эксплуатации.
5 Общие требования к структуре и функциям систем автоматизированного управления
5.1 Структура систем автоматизированного управления
5.1.1 САУД и АСУД должны включать ПС, указанные на рисунке 1, в зависимости от УА по ГОСТ Р 58823-2020 (таблица 1).
|

Рисунок 1 - Состав САУД (АСУД) ТС
5.1.2 ПС обнаружения решает задачи регистрации ЦО с помощью ВК, РФ, РЗЛ, РЗП, лидаров, ультразвуковых датчиков и передачи информации о них в БУ для дальнейшего распознавания.
5.1.3 ПС распознавания осуществляет идентификацию ЦО по информации, поступившей о них от подсистемы обнаружения ЦО, с целью их селекции на легковые и грузовые ТС, мотоциклистов, велосипедистов и пешеходов, ОИ и стационарные объекты (здания и сооружения).
Примечание - ПС распознавания может быть конструктивно объединена с ПС обнаружения.
5.1.4 Аналитическая ПС, основываясь на данных, предоставленных ей ПС распознавания, определяет приоритетность предупреждений в соответствии с требуемым уровнем предупреждения, исходя из вида ЦО, направления и скорости его (их) движения (если применимо), расстояния до него (них) с учетом текущей скорости и направления движения РТС, и предоставляет соответствующую информацию ПС предупреждения о ЦО.
5.1.5 ПС предупреждения о ЦТС и ЦО включает в себя компоненты, позволяющие передавать предупреждения водителю РТС путем визуальных (световые индикаторы, текстовые и графические сообщения), звуковых (тональные и голосовые сообщения) и тактильных воздействий, передающихся через рулевое колесо, педали управления или сиденье водителя.
5.1.6 ПС управления РТС предназначена для воздействия на органы управления или соответствующие системы РТС (рулевое управление, тормозная система, органы управления ускорением и выбора передачи или режима в трансмиссии) для осуществления части или всей полноты ЗУД по результатам работы аналитической ПС.
5.1.7 ПС диагностики осуществляет постоянный мониторинг состояния САБ, САУД, АСУД и РТС с целью выявления сбоев и неисправностей и информирует водителя (при его наличии) или пользователя РТС об их появлении. В САУД УА 1-4 и АСУД УА 3, 4 ПС диагностики осуществляет мониторинг состояния водителя (пользователя) РТС с целью определения его вовлеченности в процесс управления РТС.
5.1.8 ПС авторизации осуществляет контроль права водителя, пользователя или диспетчера на управление и/или использование РТС.
5.1.9 ПС коммуникаций осуществляет внешнее информационное взаимодействие с учетом требований ГОСТ Р 56205 САУД или АСУД РТС с серверами навигационной системы, работающей в режиме реального времени, спутниками GPS/ГЛОНАСС, диспетчерским центром при управлении РТС в автономном режиме (двунаправленная связь).
5.2 Требования к функциям систем автоматизированного управления
5.2.1 В процессе функционирования ТС для транспортирования МО оперирует тремя потоками: МО, энергией и информацией (см. рисунок 2), осуществляя над ними следующие три действия: трансформирование, трансхронирование (хранение) и транспортирование.
|

Рисунок 2 - Основная функция САУД (АСУД) ТС
5.2.2 Основная функция САУД (АСУД), установленной на РТС, - преобразование входного потока информации, поступающей от КО и датчиков РТС о его состоянии и статусе систем, в выходной поток информации (управляющих воздействий) на органы управления РТС, сигнальные устройства и в рамках сетевых взаимодействий "ТС-ТС" (V2V), "ТС-ОИ" (V2I) и др.
5.2.3 В процессе функционирования САУД (АСУД) осуществляет три действия: трансформирование, трансхронирование и транспортирование над потоком информации (см. таблицу 1). Действия осуществляются с помощью МО (компонентов САУД или АСУД) при наличии энергии.
Таблица 1 - Обобщенные действия, совершаемые в подсистемах транспортного средства
Потоки | Обозначения | Обобщенные действия | |||
потоков | N | Трансформи- | Транспортиро- | Трансхрониро- | |
Информации | Ин | 1 |
|
|
|
Материальных объектов | МО | 2 |
|
|
|
Энергии | Э | 3 |
|
|
|
| |||||
5.2.4 В процессе проектирования САУД и АСУД необходимо применять принцип трансдействия, отражающий все взаимодействия компонентов САУД и АСУД между собой и окружающей средой.
5.2.5 САУД и АСУД делятся на пять УА согласно таблице 1 ГОСТ Р 58823-2020.
5.2.6 ЗУД РТС (см. рисунок 3) включает в себя, в том числе без ограничений:
а) управление направлением движения РТС (компонент движения по оси "Y" на рисунке 4) посредством рулевого управления (оперативная задача);
|

Рисунок 3 - Схематический вид ЗУД РТС
|
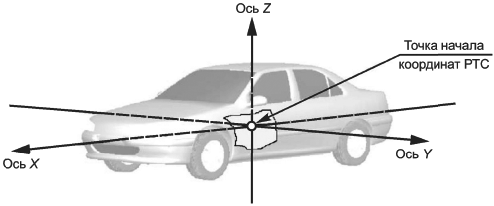
Рисунок 4 - Оси движения РТС
б) управление скоростью РТС (компонент движения по оси "X" на рисунке 4) через ускорение и замедление (оперативная задача);
в) мониторинг дорожной обстановки с помощью РРОС (оперативная и тактическая задачи);
г) осуществление реакции на объекты и события (оперативная и тактическая задачи);
д) планирование маневров (тактическая задача); а также повышение заметности РТС с помощью освещения, сигнализации, графических информаторов и т.д. (тактическая задача).
Примечание - Словосочетание "завершенность (полнота) задач управления движением" означает полное выполнение всех подзадач ЗУД водителем, САУД или АСУД или обоими.
5.2.7 САБ, САУД или АСУД должны осуществлять выбор ЦТС для предупреждения водителя РТС или, соответственно, осуществления автоматических управляющих воздействий на органы управления РТС с учетом ТНД РТС (см. рисунок 5). Если водитель РТС или САБ, САУД или АСУД планирует маневр смены полосы движения или поворота, то САБ, САУД или АСУД должна контролировать, помимо ЦТС на текущей полосе движения РТС (ТС 2 на рисунке 5), ТС на полосе движения (ТС 3 на рисунке 5), в направлении которой запланировано движение РТС (целевая полоса движения). Также в этом случае необходимо отслеживать ТС, движущиеся по целевой полосе движения сзади и сбоку РТС (включая слепые зоны), и либо информировать о них водителя, либо учитывать их наличие и скорость при перестроении.
|

Рисунок 5 - Зоны предупреждения в зависимости от ТНД РТС
5.2.8 При обнаружении опасности для движения РТС в ТНД, а также для информирования водителя или пользователя РТС о статусе САБ, САУД или АСУД данные системы должны выдавать ему соответствующие предупреждающие сообщения как минимум одним из трех способов: звуковым (аудиопредупреждения), визуальным (визуальные сообщения) или осязательным (тактильные сигналы) в соответствии с рисунком 6.
|

Рисунок 6 - Предупреждающие сообщения подсистемы предупреждения для водителя или пользователя РТС
5.3 Требования к проектированию систем активной безопасности
САБ разрабатываются в целях оказания водителям помощи в управлении ТС и повышения БДД. Такие системы делят на системы предупреждения, информирующие о наличии той или иной опасности, которая может повлиять на безопасность движения РТС, и системы управления, позволяющие облегчить контроль за ситуацией в нормальных условиях управления РТС и помочь водителю избежать ДТП и/или смягчить его последствия в критических ситуациях.
САБ должны быть безопасны и удобны в пользовании для обычного водителя и при необходимости предоставлять ему возможность полностью взять управление РТС на себя.
5.3.1 Сфера применения
Функции САБ подразделяют на следующие три категории: предоставление информации, предупреждение и контроль.
5.3.2 Принципы управления
Принципы управления предусматривают контроль следующих элементов:
- элементы управления;
- рабочие элементы;
- элементы отображения информации;
- вспомогательные элементы.
Водитель РТС должен иметь возможность легко и однозначно понимать сложившуюся ситуацию в условиях текущей дорожной обстановки и эффективным образом использовать САБ в соответствии с целями, для которых она предназначена.
Элементы управления и рабочие элементы подразделяют на элементы, используемые в нормальных условиях управления, и элементы, используемые в условиях опасности для движения.
5.3.2.1 Элементы управления:
а) функции САБ должны быть спроектированы таким образом, чтобы их можно было легко отключить в нормальных условиях движения и в тех случаях, когда столкновения можно избежать.
Примечание - Одна из основных целей САБ, таких как адаптивный круиз-контроль в соответствии с ГОСТ Р 58824 и т.п., которые используются в нормальных условиях управления, состоит в облегчении работы водителя. В САБ должна быть предусмотрена функция, позволяющая водителю РТС в нормальных условиях управления отключить ее с помощью простых, осознанных действий в любой момент времени;
б) если САБ, оснащенная средствами воздействия на органы управления РТС, определяет, что столкновение неминуемо, то она должна задействовать функцию, позволяющую избежать и/или смягчить последствия ДТП.
Примечание - В условиях опасности для движения, когда водитель не предпринял необходимых действий по предотвращению ДТП, должна быть предусмотрена возможность активации функции вмешательства САБ во избежание ДТП или смягчения его последствий.
5.3.2.2 Рабочие элементы:
а) для САБ, которые управляют РТС в нормальных условиях движения, водитель должен иметь возможность вручную перейти с режима "включено" в режим "выключено" и оставить систему в режиме "выключено";
б) для САБ, которые управляют РТС в условиях опасности для движения (например, система опережающего экстренного торможения по ГОСТ Р 58839), исходный режим работы должен быть установлен в положение "включено".
Примечание - Во избежание ДТП или в целях смягчения его последствий основным приоритетом является снижение тяжести травмирования, в связи с чем режим работы САБ в процессе управления должен оставаться в положении "включено". Вместе с тем с учетом предпочтения водителя САБ допускается оснащать ручным переключателем, позволяющим перевести ее в положение "выключено". В этом случае водитель должен иметь возможность определять режим, в котором находится данная система. Водитель РТС должен постоянно информироваться о выключенном состоянии САБ до момента ее следующей активации.
5.3.2.3 Элементы отображения информации:
а) водитель должен получать четкую информацию, подтверждающую, что в данный момент времени САБ активировала функцию контроля скорости и/или траектории движения РТС.
Примечание - Если САБ взяла на себя активную функцию управления РТС, то факт активации этой функции должен четко отображаться. Водитель должен быть осведомлен о том, что САБ или одна из ее функций активирована, с тем, чтобы он мог надлежащим образом управлять РТС с помощью соответствующих функций;
б) водитель должен уведомляться о статусе САБ в случае ее сбоя или неисправности.
Примечание - Если САБ работает со сбоями или перестала работать, водитель должен быть проинформирован о статусе этой системы. Это необходимо во избежание недопонимания со стороны водителя в том случае, если САБ все еще работает;
в) водитель должен уведомляться в том случае, если САБ обнаруживает, что создавшиеся условия не позволяют обеспечить ее нормальную работу.
Примечание - Если САБ работает со сбоями, например в случае нарушения работы датчика в некоторых условиях управления, например во время дождя или в случае, когда не видна дорожная разметка, водитель должен уведомляться о статусе САБ для осуществления плавного перевода функции управления на себя;
г) водитель должен уведомляться о любой передаче функции управления от него к САБ и обратно.
Примечание - Передача функции управления между водителем и САБ является той стадией, на которой реализуется компонент автоматизации. Любая передача функции управления должна быть ясна для водителя, при этом как минимум он должен уведомляться о любой передаче такой функции по команде САБ с тем, чтобы он мог знать, управляет он РТС в данный момент или нет.
5.3.2.4 Вспомогательные элементы:
а) в случае, когда САБ автоматически управляет скоростью и направлением движения РТС, а задача водителя сводится к тому, чтобы следить за работой этой системы, следует рассмотреть возможность разработки соответствующих механизмов, которые бы напоминали водителю о необходимости постоянно концентрировать свое внимание на РТС, дороге и дорожной обстановке.
Примечание - При использовании таких систем с высоким уровнем автоматизации, как адаптивный круиз-контроль в соответствии с ГОСТ Р 58824, в сочетании с системой удержания в полосе движения в соответствии с ГОСТ Р 58804, управляющих скоростью и направлением движения РТС, функции водителя сводятся к контролю за работой систем РТС и отслеживанию дорожной обстановки. Для того чтобы управление РТС постоянно находилось под контролем водителя, необходимо предусмотреть надлежащие меры, позволяющие ему быть постоянно вовлеченным в процесс управления;
б) водителей следует уведомлять о надлежащем использовании САБ до ее общего распространения.
Примечание - Изготовитель РТС должен предоставлять информацию о правильном использовании САБ с целью не допустить недопонимания и/или чрезмерного доверия к этой системе. Например, необходимо, чтобы водитель понимал, какими функциями обладает установленная на РТС САБ, и чтобы до ее использования ему были предоставлены соответствующие инструкции;
в) для визуальных и звуковых уведомлений водителя следует использовать стандартные символы и сигналы при их наличии.
Примечание - Для уведомления водителя РТС необходимо обеспечить унификацию информации, в связи с чем использовать (при наличии) стандартные символы. Символы для предоставления водителю визуальной информации должны соответствовать ГОСТ Р 58497, а правила предоставления аудиопредупреждений - ГОСТ Р ИСО 15006;
г) для тех функций САБ, на действия которых следует обращать внимание других участников дорожного движения, необходимо предусмотреть заблаговременную подачу соответствующих сигналов для других участников дорожного движения.
Примечание - Для привлечения внимания окружающих участников дорожного движения (водители, пешеходы и велосипедисты) к маневрам РТС, активации торможения, планируемой смене полосы движения или иным ситуациям, требующим их внимания, должна применяться соответствующая сигнализация.
5.4 Общие принципы использования информационного и телекоммуникационного оборудования
5.4.1 При наличии на борту РТС водителя все типы ИТО, предназначенного для ТС, должны разрабатываться таким образом, чтобы не вынуждать и не стимулировать его в процессе управления ТС к одновременному использованию обеих рук для управления этим оборудованием даже в течение непродолжительного времени.
5.4.2 Использование ИТО, требующего от водителя визуального контроля во время движения ТС, должно быть сведено к минимуму. В процессе движения ТС водителю может выдаваться функциональная информация, например способствующая выполнению водителем РТС, оснащенного САУД (АСУД) УА 1-4, его непосредственных задач по управлению ТС (в том числе по поиску маршрута и планированию поездки), которая служит целям управления грузовыми и транспортными потоками, проверки ТС, автоматической регистрации нагрузки и выполнению других задач, связанных с управлением РТС. Визуальная информация, которая может в значительной степени отвлекать внимание водителя (например, телепрограммы, видеопрограммы, коммерческие данные), должна либо полностью отключаться во время движения РТС, либо передаваться таким образом, чтобы водитель не мог воспринимать ее непосредственно.
5.4.3 ИТО не должно приводить в неработоспособное состояние или создавать помехи для функционирования действующего контрольного оборудования и предписанных приборов, в частности тех из них, которые требуются для обеспечения БДД и безопасной работы РТС и необходимы водителю для безопасного управления им.
5.4.4 Надлежащее использование ИТО на ТС, а также полное или частичное несрабатывание ИТО не должно отражаться на безопасности работы ТС. Это означает, что водитель должен быть в состоянии в любое время выполнить ЗУД.
5.4.5 ИТО не должно создавать никакой опасности для пассажиров или других участников дорожного движения. Это относится и к возможному неправильному применению данной системы неопытными пользователями.
5.4.6 В телекоммуникационных системах, работающих на основе речевых сигналов и предназначенных для использования водителем в процессе движения ТС, должно быть предусмотрено оборудование для передачи и прослушивания информации, которым можно пользоваться без помощи рук.
5.4.7 При разработке и применении ИТО, предназначенного для дорожных ТС, рекомендуется учитывать следующие требования.
5.4.7.1 Данное оборудование в силу его наличия и функций не должно оказывать неблагоприятного воздействия ни на работу других систем РТС, ни на само РТС.
5.4.7.2 ИТО должно быть простым и удобным в использовании.
5.4.7.3 Следует предусмотреть возможность отключения функции отображения информации, выдаваемой ИТО, с тем, чтобы водитель мог пользоваться системой по собственному усмотрению.
5.4.7.4 Если ИТО предназначено для использования пассажиром, занимающим переднее место, и водителем, то его следует устанавливать таким образом, чтобы при надлежащем использовании пассажиром оно не оказывало отрицательного воздействия на водителя и не отвлекало его.
5.4.7.5 Визуальные сообщения и информацию не следует распределять между несколькими индикационными дисплеями, если они могут отвлечь визуальное внимание водителя, что может негативно отразиться на БДД.
5.4.7.6 Место расположения дисплеев и табло ИТО следует выбирать таким образом, чтобы при переводе взгляда водителя с дороги движение его глаз в горизонтальном и вертикальном направлении было минимальным и чтобы ему было удобно считывать информацию.
5.4.7.7 ИТО должно быть сконструировано таким образом, чтобы оно чрезмерно не отвлекало внимание водителя и не могло стать причиной опасных маневров (например, из-за излишне резкого реагирования).
5.4.7.8 Для проверки работы ИТО от водителя не должно требоваться ответа или ответных действий через конкретные промежутки времени; водитель должен быть в состоянии лично контролировать скорость взаимодействия с ИТО либо прекращать его; должна быть исключена возможность отвлечения на любое время внимания водителя от выполнения им ЗУД.
5.4.7.9 Передаваемая информация должна, когда это целесообразно, своевременно оказывать содействие водителю в соответствии с его потребностями, например плановую информацию следует передавать заблаговременно с тем, чтобы водитель мог безопасно выполнить необходимый маневр.
5.4.7.10 Водитель не должен получать второстепенную информацию во время совершения ответственных маневров (обгона, поворота на перекрестках, торможения и т.п.).
5.4.7.11 Ввод информации при помощи клавишного набора в процессе движения РТС должен быть сведен к минимуму и должен быть возможен, когда оно находится в неподвижном состоянии; следует избегать продолжительных и повторяющихся серий операций; манипулирование органами настройки следует ограничить только необходимыми операциями, причем эти органы должны быть сконструированы таким образом, чтобы ими можно было управлять без зрительного контроля (осязание).
5.4.7.12 Для сведения к минимуму времени, необходимого водителю для зрительного контроля и ограничения чрезмерного раздражения его зрительных функций, рекомендуется использовать акустический информационный канал.
5.4.7.13 Инструкции, касающиеся эксплуатации ИТО, его настроек и функционирования, должны быть однозначными, адекватными и простыми; они должны быть изложены на языке водителя (пользователя); их следует составлять таким образом, чтобы будущие пользователи также могли научиться применять данное оборудование (обучение в процессе применения).
5.4.7.14 В инструкциях по эксплуатации РТС, оснащенного ИТО, следует кратко изложить возможные опасности и ограничения, связанные с применением ИТО, и указать, что ИТО допускается использовать только таким образом, чтобы оно не создавало угрозу БДД.
5.5 Условия эксплуатации систем автоматизированного управления и систем активной безопасности
5.5.1 САБ, САУД и АСУД, установленные на ТС, должны обеспечивать заданные показатели технических и эксплуатационных характеристик в любое время года при эксплуатации круглосуточно, ежедневно в следующих условиях (если иное не указано в условиях конкретных испытаний):
а) на дорогах, соответствующих СП 34.13330 в части дорог равнинной местности;
б) в песчано-пустынной местности при массовой концентрации пыли до 5 мг/м;
в) при атмосферных осадках (снег, дождь, ледяной дождь, туман), не ограничивающих условия фронтальной видимости;
г) при условиях фронтальной видимости не менее 200 м (только для ВК).
Примечание - При невыполнении перечислений б)-г) допускается снижение производительности САБ, САУД или АСУД в пределах, согласованных производителями данных систем с изготовителем РТС;
д) при сухом обтекателе радарных датчиков, свободном от загрязнений (только для радаров);
е) при свободной от загрязнений зоне стекла ветрового окна перед объективом фронтальной ВК и объективами остальных ВК (при их наличии);
ж) при эксплуатационных скоростях РТС, соответствующих его эксплуатационной документации;
и) требования, предъявляемые к механическим нагрузкам, колебаниям в вертикальной плоскости, амплитуда (только для радаров):
- не более 0,1 м в полосе частот от 0,1 до 50,0 Гц;
- не более 1/4 длины волны (не более 3 мм - для частоты 24 ГГц, не более 1 мм - для 77 ГГц) в диапазоне частот более 50 Гц.
Примечание - При наличии датчика ускорений возможна компенсация колебаний или формирование предупреждения о необходимости снизить скорость;
к) контрастность изображений, предоставляемых ВК, должна быть не менее 500:1 (только для ВК);
л) в ночное время ЦО должны быть освещены ближним светом фар РТС (только для ВК).
5.5.2 Климатическое исполнение САБ, САУД и АСУД, включая все их компоненты, должно соответствовать климатическому исполнению ТС в соответствии с ГОСТ 15150, на которое она установлена.
5.6 Аппаратные интерфейсы компонентов систем автоматизированного управления и систем активной безопасности
5.6.1 Компоненты САБ (САУД, АСУД) должны осуществлять коммуникации со следующими электронными блоками, узлами и ПС РТС (при их наличии) в зависимости от УА САБ (САУД, АСУД) и комплектации РТС по согласованию между производителем данных систем с изготовителем РТС:
- электронный блок ABS/ESP;
- блок управления двигателем;
- блок управления коробкой передач;
- мультимедийная система ТС с дисплеем либо комбинация приборов с возможностью отображения текстовых и/или графических сообщений;
- блок управления кузовной электроникой;
- блоки управления тормозной системой;
- вспомогательные блоки управления прицепом (опционально);
- электроусилитель рулевого колеса с возможностью реализации запросов функции удержания в полосе движения;
- модуль глобального позиционирования GPS/ГЛОНАСС;
- прочие узлы, ПС и электронные блоки РТС, необходимые для реализации заложенных в РТС функций.
5.6.2 Интерфейс программного и аппаратного сетевого взаимодействия компонентов САБ, САУД (АСУД), а также данных систем с РТС должен быть согласован с изготовителем РТС.
5.7 Общие технические требования к системам автоматизированного управления и системам активной безопасности
5.7.1 Калибровка ВК не должна требовать от водителя или пользователя РТС специальных навыков и использования специальных устройств.
5.7.2 Конструкция кабельных соединений САБ, САУД и АСУД не должна допускать их неправильной стыковки, повреждения и/или самопроизвольного отключения.
5.7.3 Расположение компонентов САБ, САУД и АСУД на РТС должно обеспечивать максимальную эффективность, надежность и безопасность их работы.
5.7.4 Должно быть исключено самопроизвольное отключение САБ, САУД и АСУД при работе в условиях промышленных и атмосферных радиопомех.
5.7.5 САБ, САУД и АСУД должны удовлетворять требованиям по устойчивости к кондуктивным помехам по цепям питания и управления в соответствии с ГОСТ 33991.
5.7.6 САБ, САУД и АСУД должны удовлетворять нормам 3-го класса по уровню излучаемых радиопомех в цепях питания в соответствии с ГОСТ Р 51318.25.
5.7.7 САБ, САУД и АСУД должны удовлетворять требованиям по устойчивости к электростатическому разряду в соответствии с ГОСТ Р 50607.
5.7.8 САБ, САУД и АСУД по требованиям к электромагнитной совместимости должны соответствовать [4] в части требований к электрическим/электронным сборочным узлам.
5.7.9 Сопротивление изоляции САБ, САУД и АСУД, измеренное в нормальных климатических условиях между соединениями вместе со всеми контактами разъема и корпусом изделия, должно быть не менее 10 МОм.
5.7.10 Изоляция САБ, САУД и АСУД должна выдерживать без повреждений в течение одной минуты воздействия синусоидального переменного тока частотой 50 Гц с действующим значением испытательного напряжения 550 В.
5.7.11 САБ, САУД и АСУД должны удовлетворять требованиям 3-й степени эмиссии импульсных помех в цепи питания в соответствии с ГОСТ 33991.
5.7.12 САБ, САУД и АСУД должны удовлетворять требованиям по устойчивости к динамическим изменениям напряжения питания:
- при повышении напряжения питания до (18±0,2) В в течение 2 ч соответствовать функциональному классу А-С в соответствии с ГОСТ 33991;
- повышении напряжения питания до (24±0,2) В в течение 5 мин соответствовать функциональному классу А-С в соответствии с ГОСТ 33991;
- воздействии напряжения обратной полярности (минус 14±0,2) В в течение (5±0,2) мин соответствовать функциональному классу А в соответствии с ГОСТ 33991;
- после плавного снижения напряжения питания с 16 до 0 В и последующего повышения от 0 до 16 В со скоростью изменения напряжения (0,5±0,1) В/мин соответствовать функциональному классу А в соответствии с ГОСТ 33991.
5.7.13 БУ САБ, САУД и АСУД должны удовлетворять требованиям 5.1 и приложения А ГОСТ Р 58834-2020.
5.7.14 ВК САБ, САУД и АСУД должны удовлетворять требованиям 5.2 и приложения Б ГОСТ Р 58834-2020.
5.7.15 Радары САБ, САУД и АСУД должны удовлетворять требованиям 5.3 и приложения В ГОСТ Р 58834-2020.
Библиография
[1] | ECE/TRANS/WP.29/78/Rev.6 | Сводная резолюция о конструкции транспортных средств (СР.3) |
[2] | Правила дорожного движения Российской Федерации | |
[3] | ТР ТС 018/2011 | Технический регламент Таможенного союза "О безопасности колесных транспортных средств" |
[4] | Правила ЕЭК ООН N 10 | Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении электромагнитной совместимости |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: автотранспортные средства, транспортное средство, автомобиль, электронная система, автоматизированное управление, помощь водителю, проектирование, активная безопасность | |
Электронный текст документа
и сверен по:
, 2020
