ГОСТ ISO 6746-2-2014
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МАШИНЫ ЗЕМЛЕРОЙНЫЕ
Определения и условные обозначения размерных характеристик
Часть 2
Рабочее оборудование
Earth-moving machinery. Definitions of dimensions and codes. Part 2. Equipment and attachments
МКС 53.100
ОКП 23.3100
Дата введения 2025-01-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Государственным комитетом по стандартизации Республики Беларусь
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 20 октября 2014 г. № 71-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM
| ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY
| Госстандарт Республики Беларусь |
Казахстан | KZ
| Госстандарт Республики Казахстан |
Киргизия | KG
| Кыргызстандарт |
Россия | RU | Росстандарт |
Молдова | MD
| Молдова-Стандарт |
Таджикистан | TJ | Таджикстандарт |
Туркмения | TM | Главгосслужба "Туркменстандартлары" |
(Поправка. ИУС № 7-2024).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 26 января 2024 г. № 125-ст межгосударственный стандарт ГОСТ ISO 6746-2-2014 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2025 г.
5 Настоящий стандарт идентичен международному стандарту ISO 6746-2:2003* "Машины землеройные. Определение и условные обозначения размерных характеристик. Часть 2. Оборудование и приспособления" ("Earth-moving machinery - Definitions of dimensions and codes - Part 2: Equipment and attachments", IDT), включая техническую поправку к нему Cor.1:2004.
Международный стандарт разработан подкомитетом SC 4 "Классификация и технические характеристики для коммерческой документации" технического комитета по стандартизации ISO/TC 127 "Землеройные машины" Международной организации по стандартизации (ISO).
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам приведены в дополнительном приложении ДА
6 ВЗАМЕН ГОСТ 28632-90 (ИСО 6746-2-87)
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных (государственных) стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных (государственных) органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована в сети Интернет на сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
ВНЕСЕНА поправка, опубликованная в ИУС № 7, 2024 год
1 Область применения
Настоящий стандарт устанавливает термины и определения, условные обозначения размерных характеристик рабочего и сменного оборудования землеройных машин.
Настоящий стандарт распространяется на рабочее и сменное оборудование основных типов землеройных машин по ISO 6165.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт [для датированной ссылки применяют только указанное издание ссылочного стандарта (включая все изменения)]:
ISO 6165:2012 Earth-moving machinery - Basic types - Identification and terms and definitions (Машины землеройные. Основные типы. Идентификация, термины и определения)
3 Термины и определения
В настоящем стандарте применены термины по ISO 6165, а также следующие термины с соответствующими определениями:
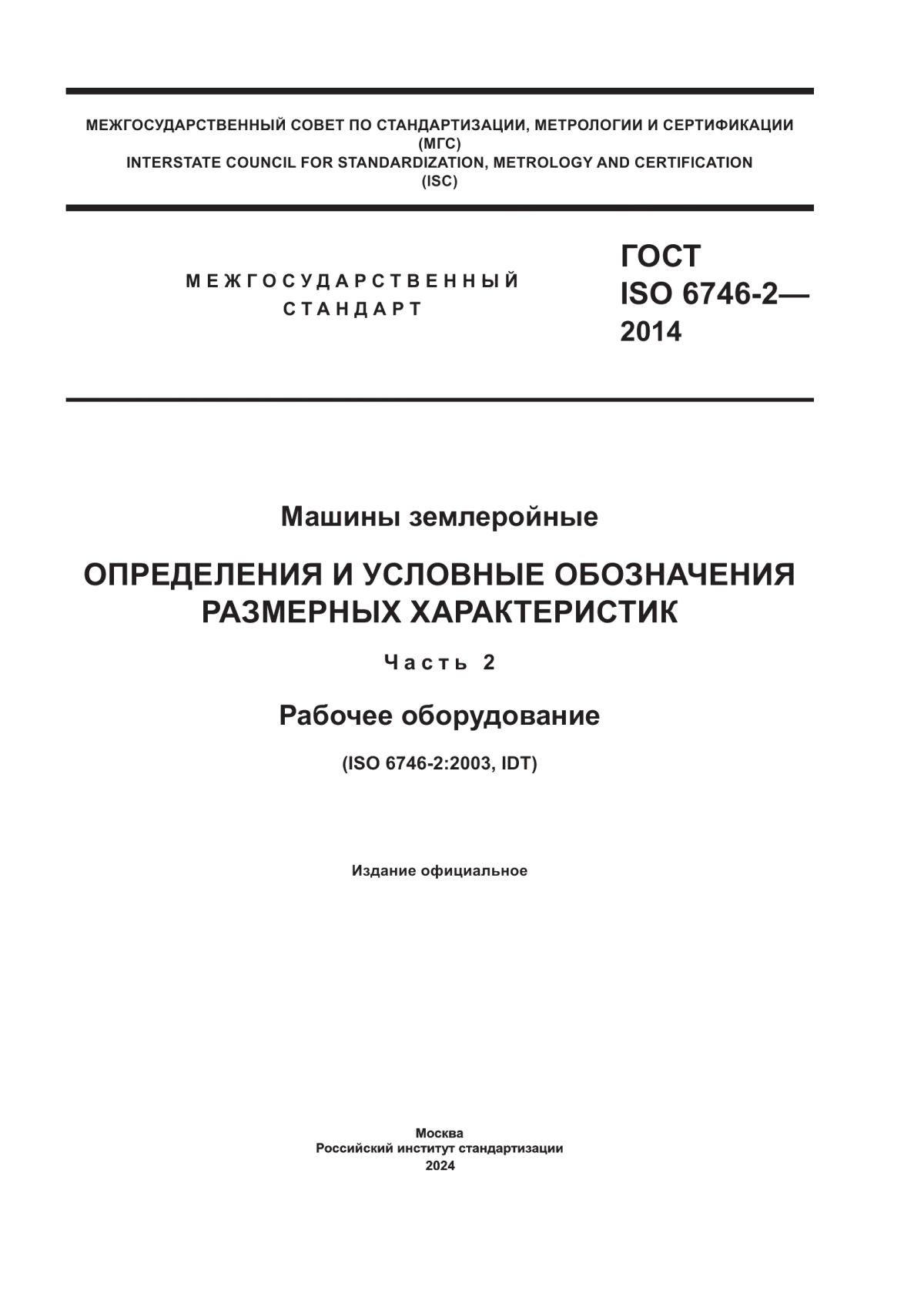
3.1 трехмерная система координат (three-dimensional reference system): Система, используемая для определения размеров землеройных машин (см. рисунок 1).
3.1.1 нулевая плоскость Y (zero Y plane): Вертикальная плоскость, проходящая через продольную осевую линию машины.
3.1.2 плоскость X (X plane): Любая вертикальная плоскость, перпендикулярная к плоскости Y.
3.1.3 плоскость Z (Z plane): Любая горизонтальная плоскость, перпендикулярная к плоскостям X и Y.
3.1.4 положительная координата (positive coordinate): Положительное направление вперед от нулевой плоскости X, вправо от нулевой плоскости Y и вверх от нулевой плоскости Z.
Примечание 1 - Пересечение осей X, Y, Z (нулевых плоскостей) обычно располагается в определенной контрольной точке, т.е. для сиденья - в точке SIP (контрольная точка сиденья) по ISO 5353; для двигателя - на осевой линии коленчатого вала; для бульдозера - на осевой линии ведущих звездочек или заднего моста; на уровне опорной плоскости отсчета - при выполнении измерений.
Примечание 2 - Если показаны только составные части (например, двигатель, сиденье), считается, что расположение и положительное направление осей от точки пересечения осей X, Y, Z (нулевых плоскостей) совпадает с обычной предполагаемой ориентацией составной части по отношению к машине, т.е. первый цилиндр двигателя обращен к передней части машины, сиденье обращено к передней части машины.
Примечание 3 - Если показана машина, ее рабочее или сменное оборудование или все данные составные части вместе, то принимают, что машина показана в направлении движения справа налево.
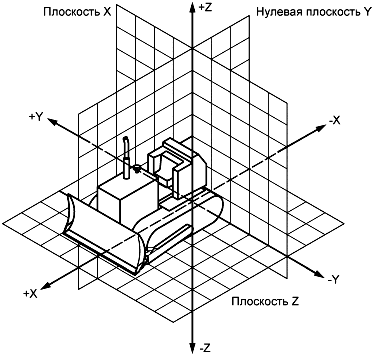 |
Рисунок 1 - Трехмерная система координат
3.2 опорная плоскость отсчета (ground reference plane); GRP: Плоскость, на которую устанавливается машина для проведения измерений: для базовой машины - твердая ровная поверхность, для рабочего и сменного оборудования - твердая ровная поверхность или уплотненная земля.
Примечание - Тип используемой поверхности зависит от предусмотренного применения машины, а также ее рабочего и сменного оборудования. Он должен определяться при разработке терминологических стандартов ISO или коммерческой документации.
3.3 базовая машина (base machine): Машина, оснащенная кабиной или навесом и, при необходимости, устройствами для защиты оператора, без рабочего или сменного оборудования, но с необходимыми креплениями для подобного оборудования.
3.4 рабочее оборудование (equipment): Комплект составных частей, монтируемых на базовую машину для обеспечения выполнения сменным оборудованием ее основной функции в соответствии с назначением.
3.5 сменное оборудование (attachment): Сборочные узлы, которые могут быть установлены на базовую машину или рабочее оборудование для специального использования.
3.6 составная часть (component): Часть или узел, составляющие базовую машину, рабочее или сменное оборудование.
4 Общие положения
Примеры размерных характеристик и условных обозначений для рабочего и сменного оборудования приведены в приложениях A-E. Данные примеры иллюстрируют использование трехмерной системы координат (см. рисунок 1) и системы условных обозначений, установленной в разделе 5, для определения и условного обозначения подобных размерных характеристик.
Для определения и условного обозначения размерных характеристик рабочего и сменного оборудования других землеройных машин в терминологических стандартах и коммерческой документации следует применять те же принципы.
Для определения размерных характеристик необходимо использовать трехмерную систему координат.
Определение размерных характеристик и спецификация условных обозначений приведены в ISO 6746-1.
5 Система условных обозначений
Каждая размерная характеристика получает условное обозначение, состоящее из прописных букв и ссылочного номера.
Для обозначения типа размера рабочего и сменного оборудования необходимо использовать две прописные буквы, обозначающие размерную характеристику:
- HH - по высоте (см. приложение A);
- WW - по ширине (см. приложение B);
- LL - по длине (см. приложение C);
- RR - радиальный или по зоне досягаемости (см. приложение D);
- AA - угловой (см. приложение E).
В зависимости от требований к специальному землеройному рабочему и сменному оборудованию, для которого разрабатывается стандарт или коммерческая документация, к прописным буквам может быть добавлена одна или более цифр.
Приложение А
(справочное)
Размеры по высоте
В настоящем приложении приведены примеры размерных характеристик рабочего и сменного оборудования по высоте и их условные обозначения.
Таблица A.1
Условное обозначение | Термин и определение | Рисунок |
HH xx | высота отвала (blade height): Расстояние по координате оси Z между GRP и верхней частью отвала (за исключением фирменной таблички и козырька), при этом отвал должен быть установлен на земле в центральном положении (при возможности) без поворота или наклона под углом |  |
HH xx | высота подъема (lift height): Расстояние по координате оси Z между GRP и нижней точкой режущей кромки отвала (при возможности) без поворота или наклона отвала под углом или самой нижней точкой поднятого зуба рыхлителя | 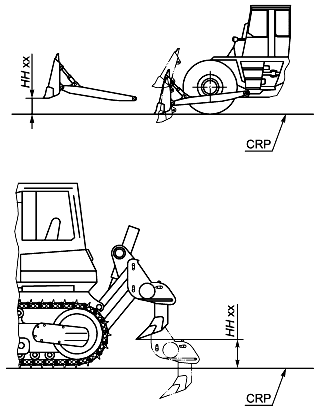 |
HH xx | максимальная высота оси шарнира в полностью поднятом положении (maximum height to hinge pin, fully raised): Расстояние по координате оси Z между GRP и геометрической осью шарнира при полностью поднятом ковше | 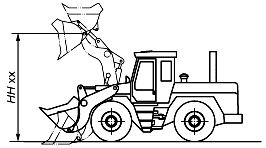 |
HH xx | максимальная высота режущей кромки или зубьев (maximum height of cutting edge or teeth): Расстояние по координате оси Z между GRP и режущей кромкой или зубьями при максимально возможном подъеме ковша по режущей кромке | 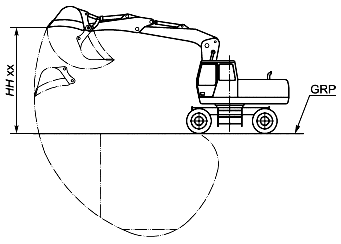 |
Приложение В
(справочное)
Размеры по ширине
В настоящем приложении приведены примеры размерных характеристик рабочего и сменного оборудования по ширине и их условные обозначения.
Таблица B.1
Условное обозначение | Термин и определение | Рисунок |
WW xx | максимальная ширина (maximum width): Расстояние по координате Y между двумя плоскостями Y, проходящими через крайние наиболее удаленные точки оборудования |  |
WW xx | ширина C-образной рамы (C-frame width): Расстояние по координате Y между двумя плоскостями Y, проходящими через крайние наиболее удаленные точки C-образной рамы |  |
WW xx | ширина открытого грейфера (width of open grab): Расстояние в плоскости Z между наиболее удаленными точками режущих кромок или зубьев открытого грейфера |  |
WW xx | ширина захвата для бревен (log grapple width): Расстояние по координате Y между двумя плоскостями Y, проходящими через наиболее удаленные точки захвата |  |
Приложение С
(справочное)
Размеры по длине
В настоящем приложении приведены примеры размерных характеристик рабочего и сменного оборудования по длине и их условные обозначения.
Таблица C.1
Условное обозначение | Термин и определение | Рисунок |
LL xx | максимальная длина (maximum length): Расстояние по координате X между двумя плоскостями X, проходящими через наиболее удаленные точки передней и задней части машины с установленным рабочим/сменным оборудованием |  |
LL xx | габаритная длина в отгрузочном положении (overall length in shipping position): Расстояние по координате X между двумя плоскостями X, проходящими через наиболее удаленные точки передней и задней части машины с установленным рабочим/сменным оборудованием в положении для транспортирования |  |
Приложение D
(справочное)
Размеры радиальные и зоны досягаемости
В настоящем приложении приведены примеры радиальных размеров и размеров зоны досягаемости, а также их условные обозначения для рабочего и сменного оборудования.
Таблица D.1
Условное обозначение | Термин и определение | Рисунок |
RR xx | зона досягаемости на максимальной высоте (reach at maximum height): Расстояние по координатной оси X (плоскость Y) между осью вращения и режущими кромками или зубьями, расположенными на максимальном вылете ковша | 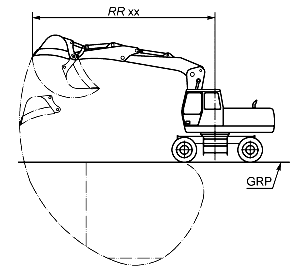 |
RR xx | внешний габаритный радиус поворота машины (outside machine clearance radius): Расстояние по координатной оси X (плоскость Z) между центром окружности поворота и наиболее удаленной точкой машины, включая оборудование/приспособления в переносном положении, при совершении поворота по наименьшему практически выполнимому радиусу | 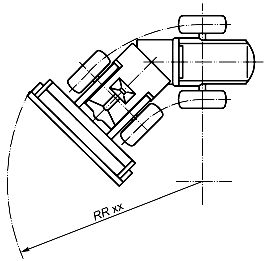 |
Приложение Е
(справочное)
Угловые размеры
В данном приложении приведены примеры угловых размеров и их условных обозначений для рабочего и сменного оборудования.
Таблица E.1
Условное обозначение | Термин и определение | Рисунок |
AA xx | угол поворота отвала (blade angle): Максимальный угол в плоскости Z, на который поворачивается отвал влево или вправо из своего среднего положения |  |
AA xx | максимальный угол поворота (maximum swinging angle): Максимальный угол в плоскости Z, на который отклоняется рабочее/сменное оборудование влево или вправо из своего среднего положения | 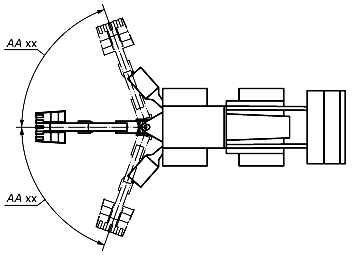 |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 6165:2012 | IDT | ГОСТ ISO 6165-2015 "Машины землеройные. Основные типы. Идентификация, термины и определения" |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT- идентичный стандарт. | ||
Библиография
ISO 5353:1995 | Earth-moving machinery, and tractors and machinery for agriculture and forestry - Seat index point |
(Машины землеройные, тракторы и машины для сельскохозяйственных работ и лесоводства. Контрольная точка сиденья) |
УДК 621.878/.879:658.511.5(083.74)(476) | МКС 53.100 | ОКП 23.3100 | |
Ключевые слова: машины землеройные, рабочее оборудование, размерные характеристики | |||
