ГОСТ Р 8.744-2011/ISO/TR 14999-3:2005
Группа Т86.10
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственная система обеспечения единства измерений
ОПТИКА И ФОТОНИКА. ИНТЕРФЕРЕНЦИОННЫЕ ИЗМЕРЕНИЯ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ И СИСТЕМ
Часть 3
Калибровка и аттестация интерферометров, методика измерений оптических волновых фронтов
State system for ensuring the uniformity of measurements. Optics and photonics. Interferometric, measurement of optical elements and systems. Part 3. Calibration and validation of interferometers, methodology of optical uavefronts measurement
ОКС 37.020
Дата введения 2013-03-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004* "Стандартизация в Российской Федерации. Основные положения"
________________
* На территории Российской Федерации документ не действует. Действует ГОСТ Р 1.0-2012. - .
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт метрологической службы" (ФГУП "ВНИИМС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 53 "Основные нормы и правила по обеспечению единства измерений" Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 13 декабря 2011 г. N 1067-ст
4 Настоящий стандарт идентичен международному документу ISО/TR 14999-3:2005* "Оптика и фотоника. Интерферометрическое измерение оптических элементов и систем. Часть 3. Калибровка и валидация оборудования для интерферометрического испытания и измерений" (ISO/TR 14999-3:2005 "Optics and photonics - Interferometric measurement of optical elements and optical systems. Part 3: Calibration and validation of interferometric test equipment and measurements")
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемом информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Техническим комитетом ИСО (ISO/TC 172/SC1) была подготовлена и опубликована под общим названием ИСО 10110 "Оптика и фотоника - Подготовка технической документации на оптические элементы и системы" серия международных стандартов "Обозначения в технической документации характеристик оптических элементов и систем", причем особое внимание уделено части 5 "Допустимые отклонения формы поверхности" и части 14 "Допустимые отклонения волнового фронта".
После опубликования серии стандартов и особенно упомянутых двух частей экспертам стало очевидно, что необходимы дополнительная документация и информация о представлении изготовленных оптических элементов и систем с допустимыми отклонениями. Поэтому ISO/TC 172/SC1 подготовил и опубликовал Технический доклад под названием "Интерферометрия волновых фронтов и форм поверхностей оптических элементов".
При обсуждении было констатировано, что Технический доклад или стандарт впервые имеют отношение к волновой оптике, т.е. базируются на физической оптике, а не геометрической. Поэтому пояснены только основные аспекты, представляющие наибольшие трудности для понимания.
С учетом складывавшейся ситуации, когда в документах ИСО не обсуждались проблемы интерферометрии, естественным было желание сделать изложение предельно доступным. Возникла дискуссия по вопросу о целесообразности обсуждения таких важнейших направлений, как интерференционная микроскопия (для наблюдения и описания микрошероховатостей поверхностей оптических элементов), интерферометрия сдвига (например, для описания подвергшихся коррекции оптических систем), многолучевая интерферометрия, формирование и считывание изображений в когерентном излучении или методы обращения волнового фронта. Решено было отразить и такие методы, как классическая двулучевая интерферометрия, а также с распространенными методиками типа голографической интерферометрии, муаровым методом и профилометрией, наряду с Фурье-спектроскопией и поляриметрией, которые дополняют микроскопическую интерферометрию (микроинтерферометрию).
Для дополнения ИСО 10110 изложение материала содержало описание общепринятых способов оценки качества оптических элементов. Это было выполнено путем укомплектования первой версии Технического доклада несколькими дополнительными частями с учетом того, что в ближайшем будущем возникнут более жесткие допуски на отклонения от идеальной формы или шероховатости поверхности (примерно на два порядка) оптических элементов и систем, предназначенных для работы в экстремальном вакуумном ультрафиолете (=6-13 нм) в системах микролитографии.
Данный стандарт (ИСО 14999) посвящен методам оценки качества оптических элементов и систем в целом, имеющих отношение к производимым ими (элементами и системами) деформациям волнового фронта. Эти искажения распределены по шкале пространственных частот, однако в данном стандарте (ИСО 14999) рассматриваются деформации волнового фронта только в низко- и среднечастотном диапазонах спектра пространственных частот. Высокочастотный участок спектра может быть измерен только с помощью микроскопа, с использованием результатов измерений рассеянного света или вообще неоптических способов зондирования поверхности.
Подобное рассмотрение может быть выполнено применительно к любому спектральному диапазону излучения, используемого для зондирования поверхности. В ИСО 14999 для наглядности рассмотрен случай использования видимого излучения. В ряде случаев при измерениях шероховатости поверхности применяются -лазеры с длиной волны 10,6 мкм (после шлифования изделия) или эксимерные лазеры с длинами волн 193 или 248 нм при контроле микролитографической оптики. Однако в стандарте они упоминаются изредка и не детализируются. Об остальных участках оптического спектра речь в ИСО 14999 не идет.
1 Область применения
Настоящий стандарт рассматривает источники погрешностей и деление их на симметричные и несимметричные части. В нем также описываются критерии оценки надежности результатов измерений по качеству физически реализуемой эталонной поверхности и создание методик испытаний, обеспечивающих достижение абсолютной калибровки.
2 Термины и определения
В настоящем стандарте применены следующие термины и определения:
2.1 идеальная форма: Математическое описание формы оптической поверхности.
2.2 погрешность поверхности: Отклонение контролируемой поверхности от идеальной формы, включая воздействия, оказываемые силой тяжести и креплением.
2.3 погрешность волнового фронта: Отклонение формы волнового фронта, соответствующее отклонению поверхности, определяемое по интерферограмме.
2.4 абсолютное измерение: Методика, выявляющая отклонение волнового фронта контролируемого объекта относительно идеальной формы, а не физически реализованной поверхности.
2.5 квазиабсолютное измерение: Методика, выявляющая отклонение формы волнового фронта, ограниченное определенными источниками, но также относительно идеальной формы, а не физически реализованной поверхности.
3 Систематическое исследование контрольного оборудования, измерительной установки и окружающей среды как источников погрешностей
3.1 Общие сведения
Как известно, целью измерения является определение значения измеряемой величины, причем в контексте данного стандарта эта оптическая величина или параметр, как, например, форма волнового фронта, связана с характеристиками оптических элементов или оптических систем. Измерение начинается с выбора подходящей измеряемой величины, определения метода и соответствующей методики выполнения измерений.
Любой результат измерения в силу несовершенства самого процесса измерения отягощен погрешностью измерений. Вследствие неопределенности измерений истинное значение измеряемой величины всегда неизвестно.
Неопределенность измерения содержит много составляющих. Некоторые из них определяются статистическими методами и характеризуются экспериментально получаемыми стандартными отклонениями (часто именуемыми стандартными неопределенностями). Другие составляющие неопределенности определяются экспериментальным путем или с использованием других источников информации и вычисляются исходя из предполагаемых распределений вероятности. Они также характеризуются стандартными отклонениями.
Случайные погрешности выявляются в ходе выполнения повторных измерений в одних и тех же условиях измерений. Это приводит к рассеянию результатов вокруг среднего значения. Они не могут быть исключены, но порождаемая ими неопределенность измерений может быть уменьшена путем увеличения числа измерений и статистической обработки получаемых результатов.
Систематические погрешности порождаются систематическими воздействиями. Они остаются практически неизменными при повторных измерениях, выполняемых в тех же условиях. Их нельзя исключить, но можно скорректировать до определенного уровня (т.е. до уровня неисключенной систематической погрешности, получившей общее признание в отечественной метрологии).
Суммарная неопределенность является комбинацией стандартных неопределенностей. Все составляющие неопределенности требуют тщательного изучения и учета, после чего возможна оценка суммарной неопределенности. При предварительной оценке выявляются составляющие, меньшие одной пятой наибольшей компоненты, и ими пренебрегают при оценке суммарной неопределенности. Неопределенности, порождаемые случайными процессами, относятся к неопределенностям типа А, а порождаемые систематически действующими источниками - к неопределенностям типа В.
3.2 Источники неопределенности
Существует много источников неопределенности, которые зависят от технических средств. Однако можно отметить много общих измерительных задач, решение которых связано с оптическими методиками контроля и калибровки:
- недостаточно полное определение типа контроля; предъявляемые требования сформулированы недостаточно точно и детально;
- несовершенство реализации методики контроля; даже при четко определенных условиях проведения контроля не представляется возможным из-за несовершенства системы соблюсти в точности все теоретически определенные соотношения;
- неточности отсчета персоналом показаний аналоговых приборов;
- недостаток разрешающей способности и наличие пороговых соотношений, погрешностей;
- величины, характеризующие эталоны и референтные фантомы;
- изменения характеристик или конструкции средств измерений или референтных фантомов со времени последней калибровки;
- аппроксимация результатов измерений и модернизация метода и методики выполнения измерений;
- случайные помехи в процессе выполнения измерений.
Во-первых, влияния источников неопределенностей могут быть коррелированы; во-вторых, источники систематических погрешностей в ряде случаев могут оказаться незамеченными. Поэтому целесообразно периодически проводить как межлабораторные сличения соответствующих средств измерений, так и перекрестные сличения результатов измерений.
Примечание - Обязательному учету подлежат идентифицированные источники погрешностей при выполнении интерферометрического эксперимента при испытаниях оптических элементов и приборов.
3.3 Суммирование неопределенностей
Наиболее корректными считаются способы учета и суммирования неопределенностей, рекомендуемые GUM [21]. При этом сначала определяются стандартные неопределенности (стандартные отклонения), затем определяется корень квадратный из суммы квадратов стандартных неопределенностей, называемый суммарной стандартной неопределенностью, после чего умножением последней на коэффициент охвата находят расширенную неопределенность. Выбор коэффициента охвата зависит от уровня доверительной вероятности. При доверительной вероятности
95%
.
4 Деление погрешностей на составляющие с вращательной симметрией и невращательной симметрией (вращательно-симметричные и невращательно-симметричные)
4.1 Общие сведения
Деление погрешностей на эти две группы составляющих является надежным практическим способом получения простейшими средствами полезной информации. Этим способом следует пользоваться с осторожностью, поскольку он не позволяет определить вращательно-симметричные погрешности испытуемого объекта. Однако практически очень часто они не влияют на результаты измерений, равно как и невращательно-симметричные.
В 4.2-4.4 описана процедура деления погрешностей измеренного волнового фронта оптических элементов на упомянутые составляющие с целью определения абсолютных значений невращательно-симметричных погрешностей при измерениях характеристик поверхностей испытуемых образцов.
Описываемая процедура применима ко всем оптическим поверхностям с вращательно-симметричной формой, включая плоскости, сферы и асферические поверхности, а также к оптическим элементам и системам, работающим на пропускание. Процедура неприменима к оптическим поверхностям, форма которых не обладает вращательной симметрией, например к внеосевым асферическим поверхностям. Более того, процедура не позволяет определить абсолютные значения вращательно-симметричных погрешностей испытуемого объекта.
4.2 Принцип
Используемые при измерениях формы волновых фронтов двухлучевые интерферометры всегда определяют разность между погрешностями измерения волнового фронта контролируемого объекта и погрешностями волнового фронта самого интерферометра, которые не могут быть отделены друг от друга путем однократного измерения. Например, погрешности интерферометра включают погрешности эталонной поверхности, погрешности пропускающей сферической поверхности или компенсирующих оптических элементов. Для определения погрешностей контролируемого образца используются так называемые вторичные эталоны (reference standards) или методы "абсолютных испытаний" (absolute tests). Однако для практического применения существуют и другие хорошо известные процедуры. Одна из них, не требующая применения дополнительных оптических элементов, называется методом "трех положений" [1] и используется при испытаниях сфер. Однако для объектов других типов (например, плоскостей, выпуклых сфер, пропускающих оптических, в том числе асферических элементов) нет простых, недорогих, доступных процедур выполнения "абсолютного контроля".
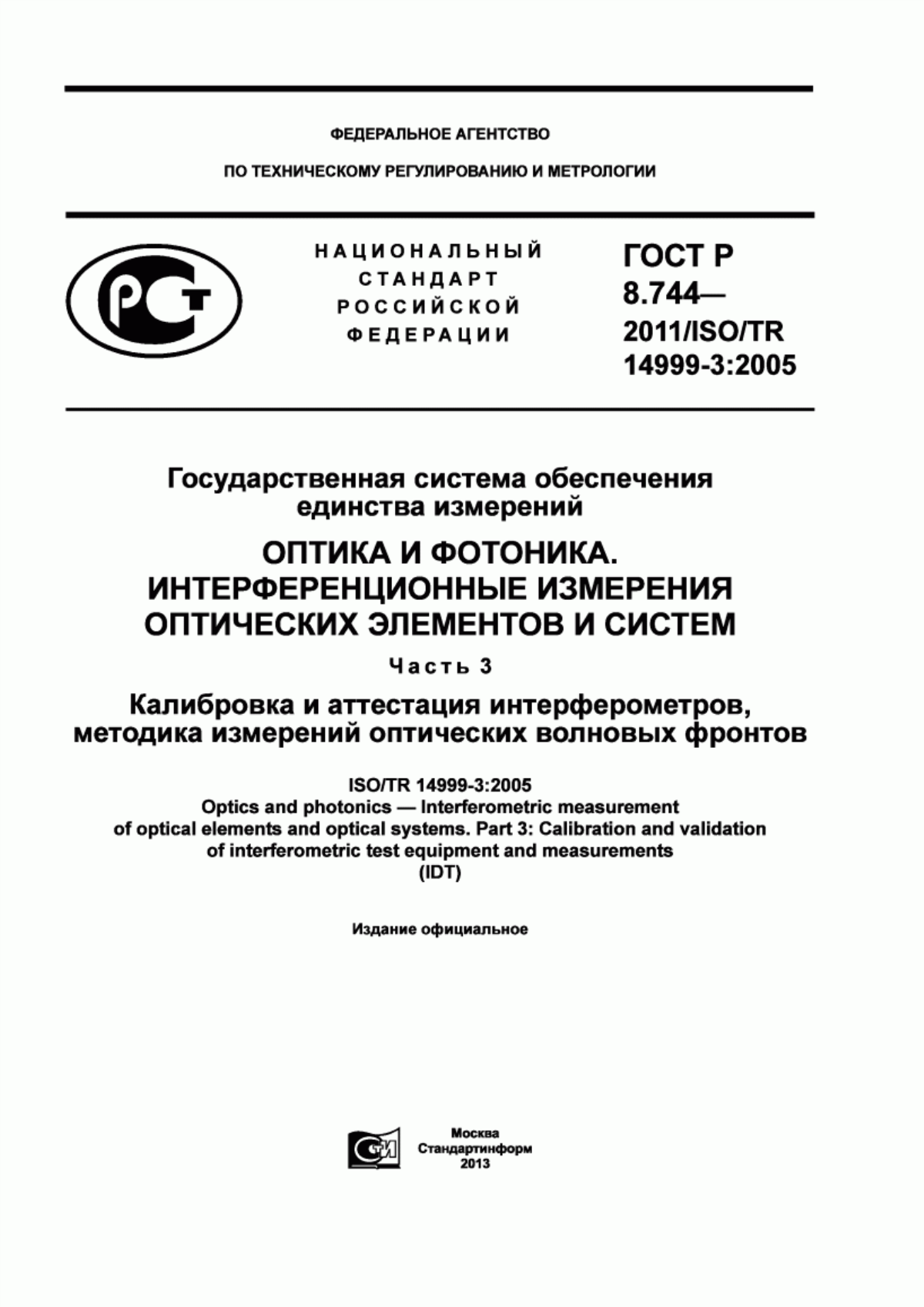
"Квазиабсолютный контроль" по определению невращательно-симметричных погрешностей волнового фронта может базироваться на измерениях контролируемого объекта под различными углами его поворота (см. рисунок 1), и тогда погрешность определяется по формуле
![]() , (1)
, (1)
где ![]() - вращательно-симметричная составляющая;
- вращательно-симметричная составляющая;
![]() - невращательно-симметричная составляющая.
- невращательно-симметричная составляющая.
Соотношение между погрешностью поверхности и измеренной погрешностью волнового фронта
описывается выражением
![]() .
.
Если погрешность интерферометра также разделить на вращательно-симметричную ![]() и невращательно-симметричную
и невращательно-симметричную ![]() составляющие, то погрешность измерений формы волнового фронта представится в виде
составляющие, то погрешность измерений формы волнового фронта представится в виде
![]() (2)
(2)
В [2-4] показано, что вращение волнового фронта с фиксацией в (где
![]() ) эквидистантно расположенных положениях (
) эквидистантно расположенных положениях (![]() - интервал между ними) с последующим усреднением данных сводит к нулю все невращательно-симметричные составляющие за исключением тех, порядок которых равен
- интервал между ними) с последующим усреднением данных сводит к нулю все невращательно-симметричные составляющие за исключением тех, порядок которых равен ![]() , где
, где = 1, 2... .
Это может быть использовано для выделения невращательно-симметричных погрешностей контролируемого образца путем выполнения измерений в положениях с усреднением результатов. Математически это записывается в виде
,
= 1, ...,
:
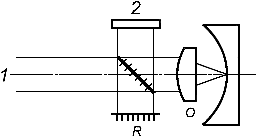
а) Оптическая схема | б) Интерферограмма |
1 - погрешность поверхности S(r, ); 2 - идеальная поверхность; 3 - линза; 4 - плоская волна на выходе интерферометра
Рисунок 1 - Оптическая схема интерференционного эксперимента по контролю выпуклой отражающей поверхности
![]() ; (3)
; (3)
![]() и т.д.
и т.д.
После усреднения полученных результатов с целью исключения (или, по крайней мере, значительного уменьшения) невращательно-симметричных составляющих (за исключением имеющих порядок ![]() ) получаем:
) получаем:
![]() . (4)
. (4)
Таким образом,
![]() , (5)
, (5)
что подлежит вычитанию из любого значения и позволяет выявить невращательно-симметричную составляющую, за исключением той, которая имеет порядок
![]() .
.
Если данные однократных измерений повторяются перед усреднением, то
![]() (6)
(6)
и
![]() , (7)
, (7)
что и является невращательно-симметричной составляющей суммарной погрешности интерферометра за исключением той, которая имеет порядок ![]() .
.
4.3 Измерительная аппаратура
Для выполнения описываемых далее измерений и контроля необходимы:
4.3.1 Цифровой интерферометр.
4.3.2 Аттестованная измерительная установка для проведения контроля.
4.3.3 Механизм вращения контролируемого образца.
4.3.4 Программное обеспечение, позволяющее усреднять и дифференцировать результаты измерений формы волнового фронта.
4.4 Методика выполнения измерений
Контролируемый образец должен быть измерен в ![]() равномерно расположенных угловых положениях. Последовательность операций такова:
равномерно расположенных угловых положениях. Последовательность операций такова:
а) измерение контролируемого образца в первом положении, зафиксированном при его вращении; регистрация результатов измерений волнового фронта с вычитанием сферической аберрации и наклона;
б) поворот контролируемого образца на угол ![]() ,
, ![]() и повторение измерения, регистрация результатов измерений;
и повторение измерения, регистрация результатов измерений;
в) повторение измерений по пункту б) во всех положениях контролируемого образца;
г) вычисление среднего из результатов измерений и регистрация усредненных данных;
д) вычитание полученных данных из результата измерений, полученного в пункте а), и регистрация окончательного результата измерений.
5 Измерение качества физически реализованной эталонной поверхности
5.1 Плоскости
5.1.1 Общие сведения
В данном случае необходимы:
а) плоский элемент типа эталонного плоского зеркала;
б) контролируемый плоский элемент или оптическая система с плоским волновым фронтом на выходе, являющиеся объектами измерений.
Излучение источника распространяется в виде плоской волны, падающей по "нормали" на эталон и контролируемый образец. Из-за дефектов обеих поверхностей отраженный волновой фронт имеет искажения. В результате формируется интерферограмма, отражающая искажения этих волновых фронтов.
Взаимная юстировка эталона и контролируемого образца позволяет пользователю изменять интерференционную картину:
- путем наклона можно увеличивать или уменьшать чувствительность измерений, меняя расстояние между полосами (интервал между двумя полосами соответствует градиенту на поверхности образца);
- путем перемещения вдоль оптической оси опорного зеркала можно зарегистрировать набор интерференционных картин с различным сдвигом полос, по которым можно выделить небольшие и локальные дефекты.
Поскольку пучки отражаются лишь один раз от эталонного зеркала и от контролируемого образца, то по интерференционной картине трудно обнаружить небольшой дефект на образце. Следует помнить, что интерферометр Майкельсона без автоматической расшифровки интерферограмм не способен выявлять дефекты поверхности с разрешением по глубине, лучшим, чем .
5.1.2 Измерение, базирующееся на эталоне плоской поверхности
5.1.2.1 Эталонная плоскость
Для многих приложений эталон плоской поверхности может считаться идеальным, если его качество, по крайней мере, в 10 раз более высокое, чем у контролируемого образца. Поэтому можно считать идеальной интерферограмму, созданную волновым фронтом, полученным в результате отражения излучения таким эталоном, а интерферограмму, полученную в результате отражения излучения контролируемым образцом, - искаженную его дефектами. Видимые невооруженным глазом искажения интерферограммы отражают аберрации волнового фронта, определяющие качество поверхности контролируемого образца.
Для определения размеров и координат дефектов на образце и эталоне пользователь может сравнить результаты первого измерения с результатами одного или нескольких последующих измерений, полученных при:
- перемещении эталона относительно образца в плоскости его поверхности;
- вращении эталона относительно образца вокруг оптической оси.
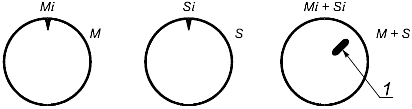
При этом пользователь может (см. рисунки 2 и 3):
- выполнять более одного перемещения в более чем одном направлении;
- выполнять более одного вращения;
- комбинировать перемещение(я) с вращением(ями).
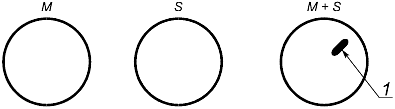
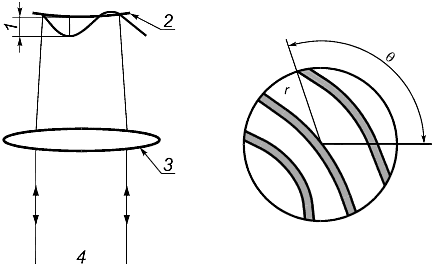
а) Начальные положения
M - эталон в начальном положении; S - образец в начальном положении; M + S - начальная интерференционная картина; 1 - неоднородность образца на начальной интерференционной картине
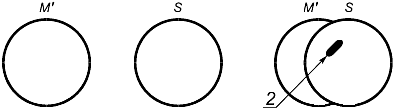
б) Положения после перемещения эталона
M' - эталон после перемещения; S - образец; M'S - вторая интерференционная картина; 2 - неоднородность образца на второй интерференционной картине
Рисунок 2 - Интерференционные картины и влияние перемещения
а) Начальные положения
M - эталон в начальном положении; Mi - индекс эталона; S - начальное положение образца; Si - индекс образца; M + S, Mi + Si - начальная интерференционная картина; 1 - неоднородность образца на начальной интерференционной картине
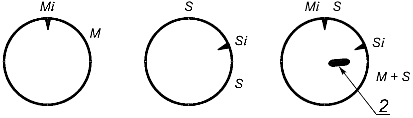
б) Положения после поворота образца
A - эталон; B - образец после поворота; C - вторая интерференционная картина*; 2 - неоднородность образца на второй интерференционной картине
________________
* Текст документа соответствует оригиналу. - .
Рисунок 3 - Интерференционные картины и влияние вращения
Путем сравнения различных интерференционных картин, соответствующих разному взаимному расположению эталона и образца, пользователь может определить местонахождение и размеры дефектов (при этом необходимо помнить, что интерферограмма отображает алгебраическую сумму аберраций).
5.1.2.2 Определение качества эталона плоской поверхности
Очевидно, что оптический элемент, используемый в качестве эталона плоской поверхности, должен быть аттестован. Проверка его качества производится в соответствии с рекомендациями, содержащимися в данном подразделе.
Пример - В 6.2 описан метод "трех плоскостей", когда плоская поверхность N1 сравнивается с плоской поверхностью N2, затем с N3, а N3, в свою очередь, с N2, в результате чего пользователь получает отклонения всех трех плоских поверхностей от идеальной формы.
Эталон и образец можно рассматривать отдельно путем введения непрозрачного экрана в плечи интерферометра. Перемещать можно как эталон, так и образец. Направление и величина перемещения выбираются пользователем, который может при желании исключить одну или более трансляций. Интерференционные картины формируются путем алгебраического суммирования дефектов эталона и образца, причем предоставляют информацию об обеих поверхностях.
Эталон и образец можно рассматривать отдельно путем введения непрозрачного экрана в плечи интерферометра. Вращать можно как эталон, так и образец. Углы поворота выбираются пользователем, который может при желании исключить одно или более вращений. Интерференционные картины формируются путем алгебраического суммирования дефектов эталона и образца, причем предоставляют информацию об обеих поверхностях.
5.1.3 Калибровочный сертификат
Выпускаемые промышленностью интерферометры и вспомогательные (в отечественной трактовке разрядные) эталонные плоские поверхности должны снабжаться калибровочными сертификатами. Калибровочный сертификат на эталонную плоскую поверхность должен содержать информацию о ее неплоскостности, а также детальное отображение расположения и размеры дефектов.
5.2 Сферы
5.2.1 Общие сведения
Оптическое качество вогнутого или выпуклого волновых фронтов может быть определено по отношению к физически реализованной сферической поверхности, откалиброванной по задаваемым параметрам, т.е. с известным оптическим качеством. При этом следует иметь в виду когерентность излучения источника. Как сферический волновой фронт, так и сферическая эталонная поверхность имеют центры кривизны.
Для получения требуемой интерференционной картины оба центра кривизны следует расположить как можно ближе друг к другу. Пользователь может добиться этого юстировкой плеч интерферометра.
5.2.2 Настройка интерферометра по идеальному эталону
Каждая разъюстировка центров кривизны приводит к интерференционной картине, свидетельствующей о появлении разности хода между сферическими волновыми фронтами.
При юстировке интерферометра могут формироваться следующие интерференционные картины:
- оба центра кривизны расположены один за другим на оптической оси: интерферограмма представляет собой совокупность концентрических колец;
- оба центра кривизны лежат в одной плоскости, перпендикулярной оптической оси: результат - интерференционная картина Юнга, т.е. совокупность прямолинейных полос;
- один из центров кривизны расположен не на оптической оси и не в той же плоскости, что и второй центр: интерференционная картина в виде эллипсов или парабол.
При настройке интерферометра следует добиваться картины в виде концентрических полос, учитывая, что:
- расстояние между кольцами возрастает, когда оба центра кривизны приближаются друг к другу;
- полоса нулевого порядка имеет место при совмещении центров кривизны;
- оставшиеся после юстировки интерференционные полосы соответствует дефектам контролируемого образца.
5.2.3 Оценка качества эталона
Метод "трех сфер" позволяет определить качество сферического эталона так же, как метод "трех плоскостей" позволяет сделать то же самое применительно к плоскому эталону (см. также 6.3).
Оптическое производство позволяет изготовить сопряженные пары вогнутых и выпуклых сферических эталонов одинакового радиуса путем их совместной полировки. Процедура оценки их качества та же, что и для плоских эталонов.
5.2.4 Альтернативный метод
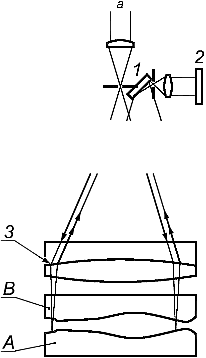
Этот метод применим к сферам с радиусом, превышающим несколько метров. В этом случае эталоном может служить плоское зеркало, тогда интерференционная картина после правильной юстировки будет представлять собой совокупность концентрических колец. Пользователь может контролировать правильность определения кривизны поверхности, следя за расстоянием между полосами (кольцами).
Интерференционная картина непосредственно связана с взаимным расположением плоского зеркала и сферы. Пользователь, следовательно, может представить себе, как различные положения плоского зеркала и сферы формируют интерференционную картину (см. рисунок 4).
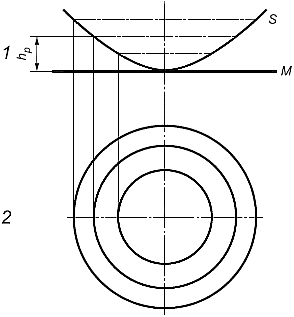
1 - изображения плоского и сферического зеркал; 2 - изображение интерференционной картины; М - эталон; S - сферическое зеркало; - стрелка прогиба
а) Кольца Ньютона (параллельные оси)
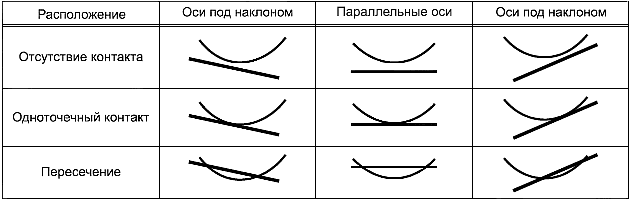
б) Таблица, демонстрирующая взаиморасположение сферы и плоского зеркала
Рисунок 4 - Контроль сферы большого радиуса кривизны
Максимум интерференционных полос возникает при ![]() . В случае точечного контакта (как показано на рисунок 4)* радиусы полос
. В случае точечного контакта (как показано на рисунок 4)* радиусы полос ![]() , где
, где - радиус
-й полосы;
- постоянный коэффициент;
- положение точки контакта.
________________
* Текст документа соответствует оригиналу. - .
5.3 Асферики
5.3.1 Типы асфериков
5.3.1.1 Общие сведения
Поскольку контроль асфериков (асферических поверхностей) не позволяет применять методы абсолютных измерений плоских и сферических поверхностей, то следует разделить их на отдельные группы.
Все методы интерферометрии основаны на сравнении двух волновых фронтов, т.е. на суперпозиции волнового фронта, сформированного асферической поверхностью, и эталонного асферического волнового фронта либо двух смещенных друг относительно друга копий асферического волнового фронта. Все зависит от сложности формирования эталонного волнового фронта.
В обычной интерферометрии имеют дело с плоским или сферическим волновыми фронтами по двум причинам: во-первых, они легко трансформируются один в другой с помощью дифракционно-ограниченной оптики; во-вторых, калибровка осуществляется методами абсолютных измерений на основе сочетания методов относительных измерений, т.е. когда контролируемый объект размещается в различных положениях. Плоский и сферический волновые фронты и простые оптические элементы типа плоских и сферических поверхностей играют ключевую роль, так как их можно похожим способом использовать при калибровке.
Следующим важнейшим моментом является необходимость применения методов интерферометрии с формированием интерферограмм в области низких пространственных частот, по крайней мере, по двум причинам. Первая из них связана с теоремой Найквиста-Котельникова, а вторая - с возникновением неизбежных больших погрешностей, если в интерферограмме имеют место значительные отклонения.
Если градиент отклонений увеличивается или возрастает разность фаз между волновыми фронтами (опорным и контролируемым), то все погрешности и неточности юстировки в интерферограмме приводят к большим погрешностям измерений.
Поэтому асферики целесообразно разделить на три группы соответственно возрастанию сложности и полноты эксперимента: стигматические; плавные и крутые асферики.
5.3.1.2 Стигматические асферики
Стигматическими именуются асферики, преобразующие сферический волновой фронт в другой волновой фронт с иным радиусом кривизны. Это же относится к преобразованию плоского волнового фронта в сферический.
Стигматические асферики (например, конические поверхности, параболоиды, эллипсоиды, гиперболоиды) обычно контролируются в интерферометрах типа Тваймана-Грина или им подобных, поскольку имеет место преобразование сферических волновых фронтов в сферические, плоских волновых фронтов в сферические и наоборот, сферических волновых фронтов в плоские. В подавляющем большинстве случаев представляется возможность объединения нескольких широкоапертурных оптических элементов, обеспечивающего сравнение порожденного асфериком волнового фронта с плоским или простым сферическим волновым фронтом [5].
В большинстве интерферометров предпочтительно использовать плоские волновые фронты, иначе светоделитель пучков может внести значительные погрешности в результаты измерений.
5.3.1.3 Плавные асферики
Плавными именуются асферические поверхности, слегка отличающиеся от плоских или сферических поверхностей с соответствующими радиусами кривизны. Следовательно, их контроль можно проводить на интерферометре Физо с осветителем, оптическая система которого формирует волновой фронт с заданной кривизной эталонной поверхности.
5.3.1.4 Крутые асферики
В данном случае для формирования эталонного асферического волнового фронта требуется достаточно сложная аппаратура и высокая квалификация экспериментатора. Необходимы такие компенсирующие оптические элементы и системы, как, например, "нулевая оптика", составленная из простых линз, или даже целые оптические системы для сопряжения идеального асферического волнового фронта. В большинстве случаев предполагается использование синтезированных голограмм или дифракционных оптических элементов, которые формируют как эталонную асферическую волну, так и сопряженную ей.
5.3.2 Методики контроля
5.3.2.1 Методики контроля стигматических асфериков
Как упоминалось ранее, контроль проводится на интерферометрах типа Тваймана-Грина, однако для гарантированного формирования плоской волны на входе и выходе интерферометра используются вспомогательные оптические элементы (системы). Для получения общего представления об этих методиках контроля приводятся два примера.
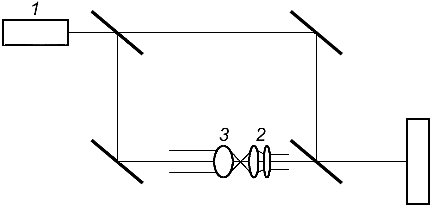
На рисунках 5 и 6 приведены оптические схемы контроля соответственно параболоидов и эллипсоидальных зеркал.
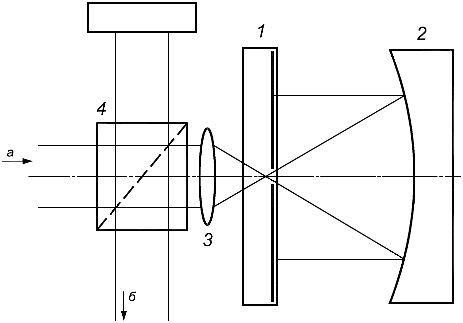
1 - плоское зеркало; 2 - параболоид; 3 - формирующая оптическая система; 4 - поляризационный светоделитель; а - излучение лазера; б - излучение, направленное к приемнику
Рисунок 5 - Контроль параболоида
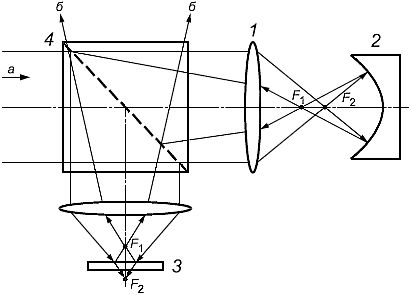
1 - формирующая оптическая система; 2 - эллипсоид; 3 - плоское опорное зеркало; 4 - светоделитель; F - точка фокусировки отраженной волны; F
- точка фокусировки падающей волны; а - излучение лазера; б - излучение, направленное к приемнику
Рисунок 6 - Контроль эллипсоидального зеркала
5.3.2.2 Контроль с использованием интерферометра Физо (метод пробного стекла)
Плавные асферики можно контролировать путем сравнения асферической поверхности со сферической согласованной кривизны, или, в некоторых случаях, с плоскими пробными стеклами. Согласование означает, что интерферометр Физо создает низкочастотную интерферограмму. Максимум возможного расхождения асферической поверхности с согласующей сферой определяется теоремой Найквиста и ограничениями, накладываемыми допустимой систематической погрешностью.
Для определения наиболее подходящего волнового фронта источника излучения необходим тщательный анализ возможных систематических погрешностей. Первый вариант заключается в выборе этого волнового фронта, согласованного с опорной поверхностью. На рисунке 7 приведен типичный пример плавного выпуклого асферика. В первом приближении применение этой методики обеспечивает расхождения с наиболее подходящей по форме сферой порядка нескольких микрометров.
1 - формирующая оптика; 2 - сферическая опорная поверхность; 3 - асферическая поверхность; а - излучение лазера; б - излучение, направленное к приемнику
Рисунок 7 - Оптическая схема интерферометра Физо с выпуклой асферической поверхностью и со вспомогательным пробным стеклом
5.3.2.3 Методика интерферометрии сдвига
Поскольку могут существовать значительные расхождения между асферическим волновым фронтом и простейшими плоским или сферическим волновыми фронтами, целесообразно применять оптические схемы интерферометров с небольшим количеством полос. Наибольшее распространение получила интерферометрия сдвига, когда волновая поверхность, порожденная асфериком, сравнивается со своим дубликатом, который, в свою очередь, может быть сформирован разными путями. Это может быть смещенный, повернутый или перевернутый дубликат. Для получения наиболее полной информации необходимо в некоторых случаях производить измерения в двух ортогональных направлениях сдвига. Типичным примером может служить интерферометр Майкельсона, в котором асферическая волна фокусируется на расположенных под наклоном зеркалах, обеспечивающих поперечный сдвиг двух волновых фронтов (рисунок 8).
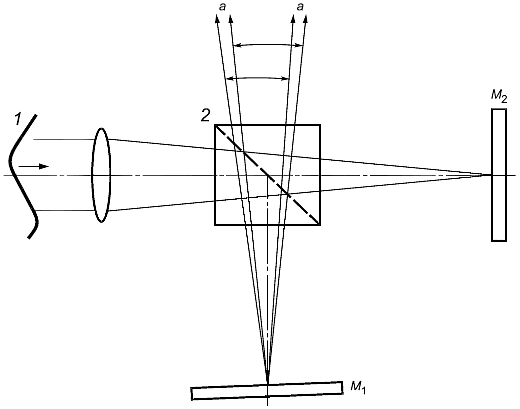
1 - асферический волновой фронт; 2 - светоделитель; M- первое зеркало; M
- второе зеркало; а - излучение, направленное к приемнику
Рисунок 8 - Интерферометр сдвига на основе интерферометра Майкельсона-Найквиста и ограничениями, накладываемыми допустимой систематической погрешностью
Альтернативный вариант - дифракционная решетка Рончи и другие портативные двухлучевые интерферометры, неоднократно описанные в литературе [5].
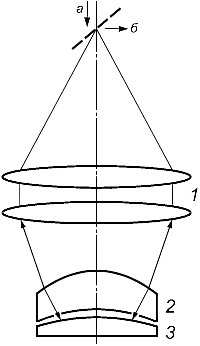
Для плавных асферических волновых фронтов перспективно применение оптических схем интерферометров радиального сдвига, когда исходный волновой фронт сопоставляется с асферическим волновым фронтом, увеличенным в поперечном направлении по масштабу (рисунок 9). При этом радиальный сдвиг может быть сделан сколь угодно большим, таким, что в первом приближении интерферограммы непосредственно отражают практически в реальном масштабе имеющие место отклонения волнового фронта.
1 - асферический волновой фронт; 2 - телескоп; 3 - поляризационный светоделитель
Рисунок 9 - Циклический интерферометр радиального сдвига
5.3.2.4 Нулевые методы контроля с использованием преломляющих оптических систем и компьютерных синтезированных голограмм
Во избежание возникновения систематических погрешностей и использования сложных вычислительных процедур стараются применять схемы интерферометров, в которых светоделители минимально искажают волновые фронты. Это может быть достигнуто путем использования компенсационных оптических элементов, формирующих волновой фронт, сопряженный с волновым фронтом, преломленным или отраженным асферической линзой или асферическим зеркалом. Если идеальный асферик формирует волновой фронт с комплексной амплитудой ![]() , то компенсирующая оптическая система (нулевая линза) должна воспроизводить сопряженный волновой фронт
, то компенсирующая оптическая система (нулевая линза) должна воспроизводить сопряженный волновой фронт ![]() таким образом, чтобы в последующей серии экспериментов воспроизводился практически плоский (за исключением неизбежных отклонений реального волнового фронта от идеального) волновой фронт, интерферирующий с плоской опорной волной.
таким образом, чтобы в последующей серии экспериментов воспроизводился практически плоский (за исключением неизбежных отклонений реального волнового фронта от идеального) волновой фронт, интерферирующий с плоской опорной волной.
На первый взгляд эта концепция представляется противоречивой, поскольку формирование сопряженного асферического волнового фронта ![]() требует в общем случае использования сложных оптических систем, которые сами по себе не могут быть проконтролированы с достаточной точностью, поскольку формируют такой же асферический фронт с его деформациями, но противоположного знака. Однако при наличии нулевого объектива, содержащего несколько (или даже один) оптических элементов, у которых достаточно точно измерена сферичность, проблема нулевого объектива может быть решена.
требует в общем случае использования сложных оптических систем, которые сами по себе не могут быть проконтролированы с достаточной точностью, поскольку формируют такой же асферический фронт с его деформациями, но противоположного знака. Однако при наличии нулевого объектива, содержащего несколько (или даже один) оптических элементов, у которых достаточно точно измерена сферичность, проблема нулевого объектива может быть решена.
Однако наиболее предпочтительным вариантом является использование дифракционных оптических элементов или компьютерных синтезированных голограмм. С помощью последних можно воспроизвести любые волновые аберрации. Хорошо известно [6], что компьютерная голограмма формирует, по крайней мере, два порядка дифракции с сопряженными по фазе комплексными амплитудами. Поэтому очевидно, что освещение такой компьютерной голограммы плоской опорной волной приведет к формированию, по крайней мере, двух первых дифракционных порядков, которые затем успешно могут быть разделены пространственными фильтрами.
Возможны три варианта введения компьютерных голограмм в интерферометры:
а) компьютерная голограмма вводится в то плечо интерферометра, в котором сформирован плоско-параллельный пучок излучения, и она непосредственно замещает реальный эталон;
б) компьютерная голограмма используется для компенсации асферичности волнового фронта и формирования плоского, сферического или другого известного опорного волнового фронта; следовательно, она вводится в то же плечо, что и асферическая поверхность, и замещает нулевой объектив (линзу);
в) компьютерная голограмма вводится после интерферометра и несет информацию об асферической поверхности в виде муаровой картины.
Использование асимметричных фазовых рельефов позволяет получить компьютерные голограммы лишь с одним дифракционным порядком. Эти голограммы были применены при испытаниях асфериков [7-9], а также в качестве киноформов (синтезированных голограмм) в случае вращательной симметрии [10].
Во избежание искривления волнового фронта необходимо обеспечить минимальное расстояние между нулевым объективом (линзой) или компьютерной голограммой и асфериком, что, помимо всего, облегчит вычисления и упростит производство оптических элементов. Эффект искривления волнового фронта хорошо известен применительно к крутым асферикам, не обладающим стигматическими свойствами. Крутые асферики являются частями оптических систем, в которых они служат компенсаторами волновых фронтов. Типичным представителем такого компенсатора служит пластина Шмидта.
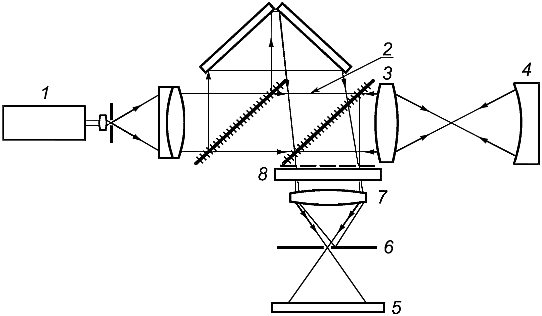
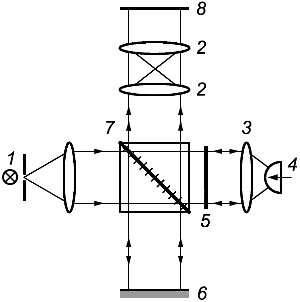
Наиболее совершенная компьютерная голограмма - нулевая линза, обеспечивает падение плоского волнового фронта на расположенные друг за другом компьютерную голограмму и асферик. На рисунке 10 представлена оптическая схема для проходящего света, а на рисунке 11 - для отраженного света с применением пропускающей компьютерной голограммы. Отрицательная линза, компьютерная голограмма и асферическое зеркало последовательно введены в одно плечо интерферометра Майкельсона. Компьютерная голограмма из падающей сферической волны формирует волну, падающую на асферическое зеркало перпендикулярно к его поверхности во всех точках. После отражения и последующей дифракции на компьютерной голограмме формируется почти сферическая волна, отражающая отклонения асферической поверхности.
1 - асферическая линза; 2 - поляризационный светоделитель; 3 - компьютерная голограмма
Рисунок 10 - Компьютерная голограмма в качестве нулевой линзы при контроле асферической линзы в проходящем свете
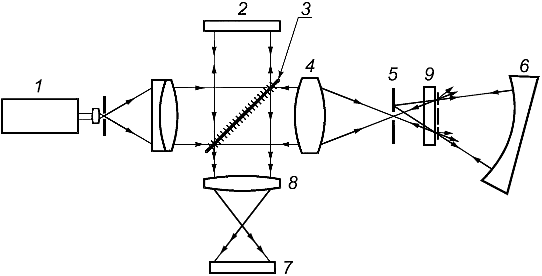
1 - лазер;
2 - опорное зеркало; 3 - светоделитель; 4 - отрицательная линза; 5 - пространственный фильтр; 6 - асферическая поверхность; 7 - плоскость интерференции; 8 - формирователь изображения; 9 - компьютерная голограмма
Рисунок 11 - Компьютерная голограмма в роли компенсатора при контроле асферической поверхности
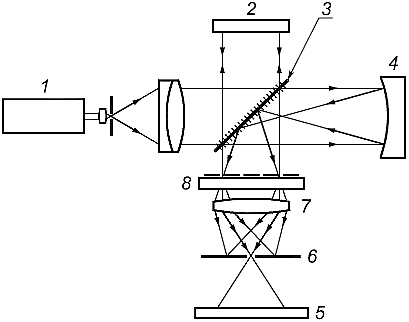
Преимущества обеих оптических схем заключены в том, что оптические элементы интерферометра пропускают почти плоские волновые фронты, тем самым минимизируются систематические погрешности. В случае строгой симметрии интерферометра другой сопряженный волновой фронт может быть использован путем размещения компьютерной голограммы в опорном плече (рисунок 12). Вспомогательная линза формирует волновой фронт со сферической кривизной. Компьютерная голограмма лишь создает отклонения от асферичности.
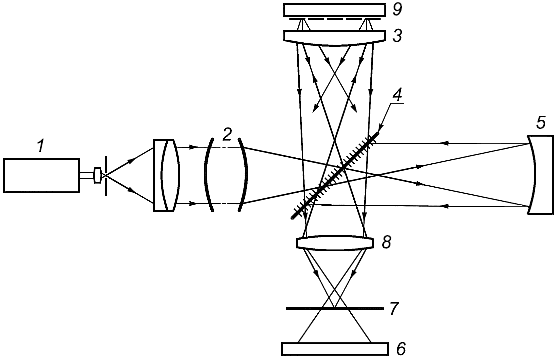
1 - лазер;
2 - конденсор; 3 - вспомогательная линза; 4 - светоделитель; 5 - асферическая поверхность; 6 - плоскость интерференции; 7 - диафрагма; 8 - формирователь изображения; 9 - компьютерная голограмма
Рисунок 12 - Интерферометр Майкельсона со вспомогательной линзой и компьютерной голограммой
В случаях, когда отклонения асферической поверхности незначительны и систематические погрешности остаются в допустимых пределах, компьютерная голограмма может быть помещена вне интерферометра. Результирующая интерферограмма может быть интерпретирована как муаровые полосы между компьютерной голограммой и интерференционной картиной в ее плоскости. При использовании пространственной фильтрации суперпозиция дифрагировавшей опорной волны и предметной волны нулевого порядка демонстрирует отклонения асферики от идеальной поверхности (рисунок 13). Компьютерная голограмма освещается плоской волной и формирует в первом порядке дифракции опорную волну для получения волны, отраженной испытуемым асферическим зеркалом. Пространственный фильтр предназначен для разделения дифрагировавшего света от недифрагировавшего.
1 - лазер;
2 - опорная волна; 3 - отрицательная линза; 4 - испытуемое зеркало; 5 - плоскость интерференции; 6 - пространственный фильтр; 7 - формирователь изображения; 8 - компьютерная голограмма
Рисунок 13 - Включение интерферометра последовательно с компьютерной голограммой - источником несущей частоты
Вращательно-симметричные асферики могут быть испытаны с использованием осесимметричных компьютерных голограмм. Поскольку все дифракционные порядки расположены на оси, в центре интерферограммы наблюдаются лишь незначительные искажения. В случаях, когда искажения асферической поверхности слишком малы и пространственное разделение дифракционных порядков становится затруднительным, то для получения дефокусировки можно добавить некоторую квадратичную фазовую функцию. Такая осесимметричная компьютерная голограмма может быть низкочастотной, что значительно упрощает процесс ее изготовления (рисунок 14). Падающая плоская волна преобразуется на параболическом зеркале в сферическую волну, дифрагирующую на осесимметричной голограмме и интерферирующую с плоской опорной волной, которая отражается в том же направлении опорным зеркалом.
1 - лазер; 2 - опорное зеркало; 3 - светоделитель; 4 - параболическое зеркало; 5 - плоскость интерференции; 6 - пространственный фильтр; 7 - формирователь изображения; 8 - осесимметричная голограмма
Рисунок 14 - Осесимметричная голограмма для испытаний асферических зеркал
5.3.2.5 Относительный контроль асфериков
Как хорошо известно, в голографии волновой фронт может быть зафиксирован на фотопластинке при выполнении определенных условий ограничения пространственных частот [11]. При контроле гладких поверхностей эти условия, как правило, выполняются. Однако при изменениях состояния объекта (например, в процессе полировки оптического элемента) зарегистрированное на голограмме изображение может оказаться непригодным для последующего сравнения с новым изображением поверхности объекта. Возможность такого сравнения предоставляет голография в реальном масштабе времени, когда сравниваются два состояния объекта в моменты времени и
. При высоких требованиях к точности и сходимости результатов измерений применение голографической методики становится проблематичным, если несущая частота на голограмме слишком высока. В этом случае поперечное "сжатие" фотослоя становится особенно заметным. Более того, голографические пластины, как правило, недостаточно стабильны, что, в свою очередь, порождает искажения волнового фронта.
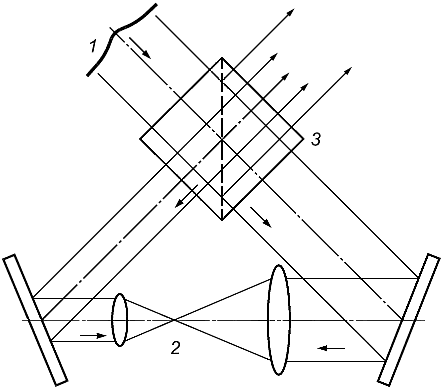
В некоторых случаях полезно уменьшить несущую частоту путем сближения формы опорной волны с формой поверхности (волновым фронтом) объекта. Подобный способ описан применительно к сферам в работе [12]. Он также применим и для асферических поверхностей. Для его реализации две асферические поверхности идентичной формы помещаются в интерферометр Тваймана-Грина (рисунок 15). При надлежащей "подгонке" форм асферических поверхностей А и В (или С) голограмма II с низкой несущей частотой может быть использована для регистрации отклонений поверхности В от А. Поскольку интерферометр сам по себе несовершенен, необходимо применение разностного метода сравнения форм асферических поверхностей В и С для компенсации погрешностей самого интерферометра. Так как поверхность А используется в качестве опорной, то ее отклонения при сравнении В и С также исключаются. Для обнаружения расхождений между отклонениями поверхностей В и С используется процедура сравнения муаровой картины, одним объектом которой служит голограмма II с зафиксированными на ней отклонениями между А и В, а другим - интерференционная картина, отображающая разницу между А и С. При этом контраст оказывается весьма слабым. Для его увеличения необходимо перекрыть волну первого порядка дифракции.
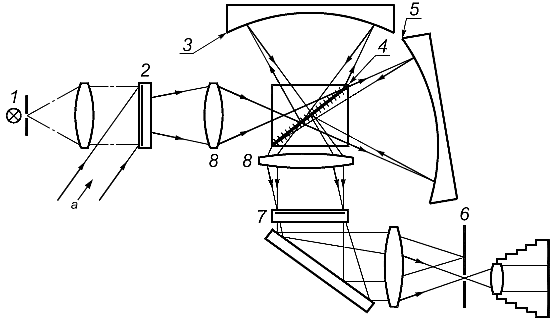
1 - источник белого света; 2 - голограмма I; 3 - асферическая поверхность А; 4 - светоделитель; 5 - асферическая поверхность В (или С); 6 - селектор первого порядка дифракции; 7 - голограмма II; 8 - формирователь изображения; а - излучение лазера
Рисунок 15 - Интерферометр с двумя компенсирующими голограммами для контроля асферических поверхностей
Однако при наличии сильных деформаций асферических поверхностей пространственное разделение нулевого и первого порядков дифракции оказывается невозможным, так как несущая частота мала (например, 10 линий/мм) и границы спектра пространственных частот простираются дальше, чем промежуток между упомянутыми порядками дифракции. Для сжатия пространственного спектра частот входящая в интерферометр волна деформируется таким образом, чтобы после отражения от поверхностей А, В или С формировались практически сферические волны, проходящие сквозь точечную диафрагму. Голограмма I предназначена для последующего деформирования волны. Это достигается путем фазового сопряжения асферической и плоской волн, входящих с одной и той же стороны по отношению к голограмме. Для восстановления волнового фронта сзади и в противоположном направлении вводится плоская волна. В [13] показано, что в данном случае даже порожденная рассеивателем деформация волны может быть компенсирована. Роль последнего играет асферическое зеркало. На рисунке 16 изображены отклонения двух асферических поверхностей при параллельной и наклонной юстировке. Интерферометр Тваймана-Грина и предварительная компенсация волнового фронта необходимы для юстировки. Во-первых, для юстировки можно использовать интерференцию в белом свете. Во-вторых, наблюдение за фокальной плоскостью предварительно скомпенсированного волнового фронта предоставляет возможность контроля за предварительной юстировкой перемещающихся поверхностей В и С (рисунок 17). Таким способом можно сравнивать асферические поверхности одной и той же группы и различные состояния какой-либо асферической поверхности, что позволяет убеждаться в наличии вращательной симметрии поверхности.
|
| |||
а) Параллельная юстировка | б) Наклонная юстировка | |||
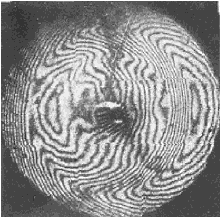
Рисунок 16 - Расхождение двух асферических поверхностей (искажения, вносимые интерферометром, исключены)
|
| |||
а) Идеальная юстировка | б) Идеальная юстировка при небольшой разъюстировке асферических поверхностей | |||
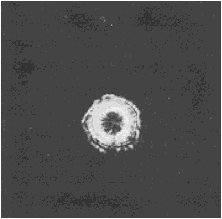
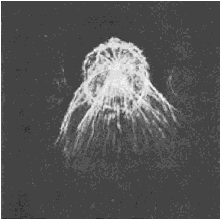
Рисунок 17 - Поперечное сечение пучка вблизи плоскости его максимального ограничения (легкая расфокусировка)
Голограмма I на рисунке 15 служит для освещения интерферометра. После отражения асферическими поверхностями А, В или С формируются практически сферические волны. Отклонения поверхности В от формы поверхности А фиксируются на голограмме II. Отклонения формы поверхности С от В измеряются после замещения поверхности В поверхностью С. Источник белого света служит для юстировки центров двух асфериков друг относительно друга.
5.4 Контроль однородности
5.4.1 Общие сведения
Проверка однородности образца требует его просвечивания излучением той же длины волны, что используется в интерферометре Майкельсона. Кроме того, обе противоположные поверхности объекта должны быть отполированы. В противном случае образец должен быть помещен в кювету, заполненную жидкостью с подходящим показателем преломления.
В обоих случаях образец встраивается в измерительное плечо интерферометра Майкельсона и при должной длине когерентности излучения формируется интерференционная картина. Затем выполняется юстировка интерферометра для компенсации разности хода путем перемещения зеркала, необходимого для учета толщины образца.
Наблюдаемая интерференционная картина является итогом совокупного влияния трех источников фазовой неоднородности:
- неровности первой поверхности образца;
- неоднородности распределения показателя преломления внутри образца;
- неровности второй поверхности образца.
Для получения требуемой информации об однородности из наблюдаемой интерференционной картины пользователь должен соблюсти ряд условий и выполнить определенные требования.
5.4.2 Требования к поверхностям
Пользователь должен определить качество обеих поверхностей образца, чтобы знать вклад их дефектов в интерференционную картину. Некоторые способы оценки качества описаны в 5.4.2.1-5.4.2.3.
5.4.2.1 Когерентность источника
При использовании излучателя с малой длиной когерентности (например, разрядной лампы высокого давления или источника белого света) пользователь может быть уверен в том, что в измеренные данные о первой поверхности образца не вносит вклад вторая поверхность.
5.4.2.2 Покрытия поверхностей
Если нанесенное отражающее покрытие преобразует поверхность в зеркальную, то ее можно использовать в качестве зеркала в измерительном плече интерферометра и оценить качество этой поверхности.
5.4.2.3 Наклон образца
Слегка наклоняя образец, пользователь может пространственно разделить пучки, отраженные обеими поверхностями. Пучок, отраженный первой поверхностью, может быть использован для интерференции с пучком, отраженным от зеркала в опорном плече. Это зеркало должно поворачиваться на тот же угол, что и образец. Оба отраженных пучка должны пройти через светоделительную пластину. Таким образом, пользователь может оценить качество одной поверхности.
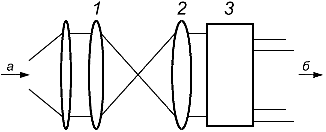
5.5 Оптические системы в режиме пропускания
Измерение характеристик подобных оптических систем может быть выполнено на интерферометре Тваймана-Грина (см. рисунок 18). Это возможно лишь для систем с небольшими волновыми аберрациями. Наряду с упомянутым интерферометром может быть использована оптическая схема с двойным прохождением световых пучков. Интерферометр должен быть предварительно откалиброван, иначе аберрации его оптических элементов будут накладываться на измеряемые волновые аберрации.
1 - источник света; 2 - оптическая система формирования изображения; 3 - контролируемая оптическая система; 4 - опорная поверхность; 5 - плоский волновой фронт; 6 - опорное зеркало; 7 - светоделитель; 8 - приемник на основе ПЗС
Рисунок 18 - Интерферометр Тваймана-Грина
Идеальная оптическая система преобразует сферический волновой фронт одной кривизны в сферический волновой фронт другой кривизны. Отсюда становится очевидным, что методика калибровки должна использовать оптические поверхности с абсолютной плоскостностью и сферичностью (см. раздел 6).
Для выполнения калибровки интерферометра, используемого при контроле оптических систем, необходимо вначале откалибровать плоскую и сферические поверхности соответствующих кривизны и диаметра, и результаты сохранить в памяти компьютера [14].
Имея эти сведения об элементах и данных калибровки с учетом незначительности аберраций самой оптической системы, можно двухступенчатым экспериментом получить информацию об ее волновых аберрациях.
При больших волновых аберрациях двойной проход пучков через систему линз может вызвать разность оптической длины путей при обратном ходе. В итоге точность получаемых результатов в некоторой степени зависит от коррекции контролируемой системы.
а) Шаг 1. Вначале перед контролируемой линзой 3 в интерферометре Тваймана-Грина (рисунок 18) устанавливается перпендикулярно к оптической оси плоская поверхность с отклонениями ![]() от идеальной плоскости. В такой конфигурации интерферометр Тваймана-Грина становится интерферометром Майкельсона. Затем по образованной интерферограмме определяются следующие аберрации
от идеальной плоскости. В такой конфигурации интерферометр Тваймана-Грина становится интерферометром Майкельсона. Затем по образованной интерферограмме определяются следующие аберрации
![]() (8)
(8)
где ![]() - аберрации, вносимые компонентами интерферометра.
- аберрации, вносимые компонентами интерферометра.
б) Шаг 2. Интерферометр Тваймана-Грина используется в обычном режиме с опорной сферической поверхностью 4, располагаемой по нормали к оптической оси и имеющей отклонения ![]() от идеальной сферы в координатной системе выходного зрачка оптической системы.
от идеальной сферы в координатной системе выходного зрачка оптической системы.
Тогда результирующие волновые аберрации равны
![]() (9)
(9)
в) Шаг 3. Аберрации исследуемой оптической системы 3 определяются с использованием уравнений (8) и (9)
![]() . (10)
. (10)
Для приведения в соответствие координатных систем как в плоскости выходного зрачка испытуемой оптической системы, так и на плоской и сферической поверхностях, требуется выполнить тщательные вычисления и провести масштабирование.
1 - лазер; 2 - контролируемый объектив; 3 - опорный объектив
Рисунок 19 - Оптическая схема контроля оптической системы в проходящем свете
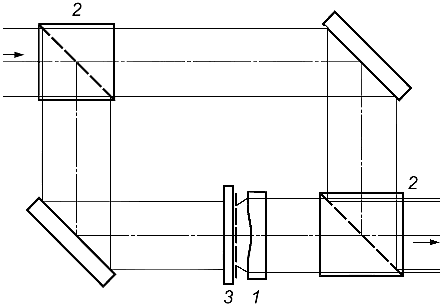
Испытания линз требуют применения в целом опорной линзовой системы, как показано на рисунке 19. В случае использования интерферометра Маха-Цандера требуются высококачественные зеркала и светоделители. На первый взгляд может показаться, что влияние плоских зеркал интерферометра может быть исключено путем записи сначала фазовых искажений самого прибора без контролируемого образца с последующим испытанием, осуществляемым введением вспомогательной оптической системы и контролируемой линзы, и затем вычитания из полученного результата данных о фазовых искажениях интерферометра. Однако каскад из линзы и вспомогательной оптической системы переворачивает пучок в измерительном плече интерферометра, что приводит к неправильности получаемых результатов.
Одним из возможных решений является использование трехкаскадных линзовых систем, не переворачивающих пучок, применяемых при контроле сферичности, или методов, основанных на вращениях и трансляциях испытуемых линз по отношению к корпусу прибора [7, 15].
Только в случае использования интерферометрии сдвига (рисунок 20) вместо высококачественной оптической системы можно применить вспомогательную дифракционно-ограниченную оптическую систему, которая, в свою очередь, может быть откалибрована с использованием вышеописанной процедуры с помощью эталонных пластин и сфер.
1 - вспомогательная оптическая система; 2 - контролируемая система; 3 - интерферометр бокового сдвига; а - излучение лазера; б - излучение, направленное к приемнику
Рисунок 20 - Интерферометр бокового сдвига для измерения волновых аберраций
Описанные методики измерений, применяемые при контроле плоскостности и сферичности поверхностей, позволяют получать абсолютные значения волновых аберраций и, как следствие, по ним можно оценить качество оптической системы с помощью вычисления функции рассеяния точки и/или оптической передаточной функции.
Однако интерферометрические методики контроля полезны не только для достижения высоких точностей результатов измерений. Если оптическая система удовлетворяет предъявляемым к ней требованиям, то полезными могут оказаться специализированные, более простые интерферометры (например, интерферометр Смарта [5]). В интерферометре Смарта центральная часть сфокусированного волнового фронта дифрагирует на очень малом отверстии (пинхоле), а остальная часть волнового фронта проходит сквозь дифракционный экран со значительным ослаблением амплитуды волны, регулируемым выбором прозрачности экрана. По интерферограмме судят об аберрациях, а также о смещении фокуса контролируемой системы, вносимом перемещениями пинхола в каустике ее фокальной области.
С использованием других оптических схем определяют четные и нечетные части волновых аберраций. Например, введение 180° вращательного сдвига между интерферирующими волновыми фронтами позволяет определить нечетную часть волновых аберраций. Оптическая схема с двухкратным прохождением луча сквозь юстируемую оптическую систему типа "кошачий глаз", помещенную в одно из плеч интерферометра Тваймана-Грина, позволяет, пренебрегая погрешностями оптических элементов прибора, выделить четную часть волновых аберраций [5].
Интерферометры радиального сдвига также полезны для контроля оптических систем. Расшифровка данных упрощается, если контролируемая система сильно сжимает пучок в измерительном плече прибора. Это имеет место в циклическом интерферометре, когда в прямом ходе пучок сжимается, а в обратном ходе пучок во столько же раз расширяется. Тогда расширенный пучок будет иметь меньшие аберрации по сравнению со сжатым пучком и его можно использовать в качестве опорного пучка.
6 Методики абсолютной калибровки
6.1 Общие сведения
Для получения высокой точности в оптической интерферометрии необходимо из результатов измерений исключить систематические погрешности самого интерферометра, включая погрешность опорной поверхности. Это достигается калибровкой прибора с помощью стандартного образца (например, эталонной поверхности).
Известная погрешность самого стандартного образца используется для коррекции показаний интерферометра в памяти работающего в реальном масштабе времени компьютера.
Основными стандартными образцами (эталонами) являются плоскости и сферические поверхности. Методики калибровки, базирующиеся на применении плоских и сферических стандартных образцов, описаны соответственно в 6.2 и 6.3. Отклонения стандартных образцов следует рассматривать как отклонения от идеальной математической опорной поверхности (плоской или сферической соответственно). Такие отклонения часто именуются абсолютными. Методики интерферометрии, направленные на определение абсолютных отклонений, принято называть абсолютными методиками интерферометрии в отличие от относительных методик, описанных в разделе 5.
В 6.2 и 6.3 рассмотрены наиболее важные методики, рекомендованные для использования. Выбор методики зависит от постановки задачи. Например, если применяется плоский стандартный образец в горизонтальном положении, то следует пользоваться абсолютной методикой, описанной в 6.2.1, а если в вертикальном, то более подходящими оказываются методики, описанные в 6.2.2 и 6.2.3.
Если необходимо изготовить стандартный образец с поверхностью наивысшего качества, то требуется выполнять ряд последовательных операций в процессе его изготовления. В промежутках между этими операциями необходимо проводить абсолютные измерения, но с относительно низкой пространственной разрешающей способностью (например, см. 6.2.3).
И наоборот, при получении окончательного результата (например, при сертификации стандартного образца) более полезными оказываются методики, описываемые в 6.2.2.
6.2 Плоскости
6.2.1 Жидкое зеркало [7]
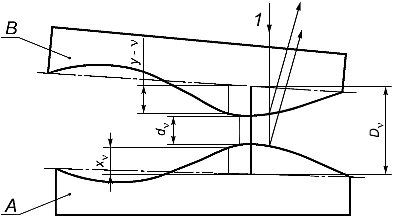
Идеальной плоскостью, которая может быть образована с учетом и под влиянием силы тяжести, является поверхность жидкости. Рекомендуемые для этой цели жидкости: медицинский жидкий парафин, вода, ртуть, кремний-органическое (силиконовое) масло. Оптическая схема - интерферометр Физо с горизонтально расположенными поверхностями (рисунок 21). Как правило, верхняя поверхность В - контролируемая поверхность, а нижняя поверхность А - жидкое зеркало. При этом необходимо, чтобы контролируемый образец был прозрачным (например, стеклянной пластиной). Если же он непрозрачен, то его следует разместить внизу в качестве поверхности А, но при этом располагаемая наверху жидкость должна быть прозрачной.
1 - зеркало; 2 - приемник излучения; 3 - коллиматор; А - верхняя поверхность; В - нижняя поверхность; а - излучение источника; А, В: комбинация из испытуемых поверхностей
Рисунок 21 - Интерферометр Физо для контроля плоских оптических поверхностей
Выбор подходящей жидкости ограничен требованием отсутствия влияния сторонних возмущений, каковыми являются: механические колебания (вибрации), колебания температуры, эффекты испарения, электрические разряды, капиллярные пограничные эффекты, частицы пыли в жидкости, неровности дна сосуда при слишком тонком слое жидкости, кривизна земной поверхности, прогиб испытуемой поверхности под действием силы тяжести с учетом ее горизонтального положения.
Последнее возмущение носит общий характер и рассмотрено в подразделе 3.3.3 ИСО 14999-2. Если размеры жидких зеркал не слишком велики, то влияние кривизны земной поверхности пренебрежимо мало; в любом случае это влияние известно и при необходимости может быть учтено. Другие эффекты связаны со свойствами жидкости и толщиной ее слоя и при необходимости могут быть приняты во внимание.
Необходимо учитывать коэффициент отражения жидкой поверхности, так как он влияет на контраст и видность интерференционных полос. Если используется зеркало из ртути, а контролируемая поверхность имеет частично прозрачное алюминиевое покрытие, то она должна электрически контактировать с содержащим ртуть сосудом для стекания статических зарядов.
6.2.2 Методика трех плоскостей [7]
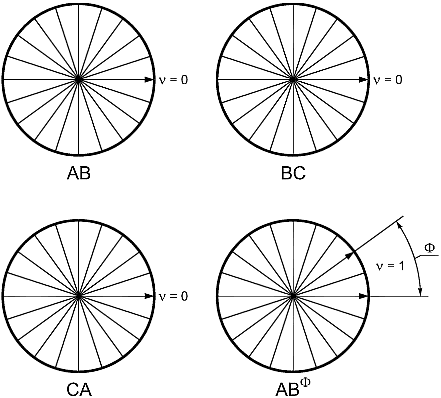
6.2.2.1 Исходными служат три неизвестные оптические плоскости А, В, С, подлежащие интерферометрическому сравнению в интерферометре Физо. На рисунке 22 представлена одна из этих плоскостей. Для интерферометрического сравнения плоскости объединяются в пары при различном взаимном расположении, изображенном на рисунке 23. Для определения абсолютных отклонений от плоскостности используются четыре варианта взаимного расположения плоскостей, изображенных на рисунке 23. Для таких измерений необходимо иметь достаточное пространственное разрешение вдоль N центральных сечений. Все четыре варианта комбинаций показаны на рисунке 24: три обычных сочетания АВ, ВС, СА, а четвертое - АВ, в котором плоскость В повернута на угол
вокруг оптической оси по отношению к ее основному положению в сочетании АВ. Угол поворота
определяет пространственное разрешение и равен
![]() M/N, где M и N - натуральные простые числа, а N - число центральных сечений, поэтому при каждом повороте вокруг центра поверхности различимыми оказываются 2N точек. На рисунках 23 и 24 M = 1, а N = 10.
M/N, где M и N - натуральные простые числа, а N - число центральных сечений, поэтому при каждом повороте вокруг центра поверхности различимыми оказываются 2N точек. На рисунках 23 и 24 M = 1, а N = 10.
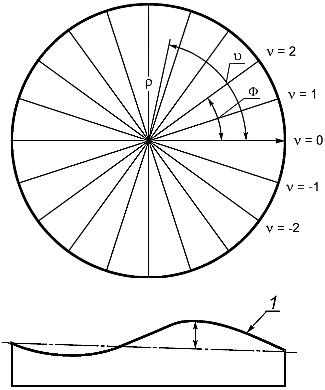
1 - контролируемая оптическая поверхность
Изображение в полярной системе координат ,
. Определению подлежат отклонения поверхности 1 от опорной плоскости (пунктирная прямая).
Рисунок 22 - Одна из трех поверхностей А, В или С (вид сверху и сбоку)
1 - световой поток
Расстояние определяется через дробную часть интерференционного порядка, целая часть интерференционного порядка не представляет интереса. Расстояние между опорными плоскостями равно
. Искомые отклонения от плоскостности
и
являются измеряемыми величинами. Величины
,
,
и
являются функциями от поперечной координаты (положения).
Рисунок 23 - Комбинация АВ (вид сбоку)
В четвертой комбинации АВ плоскость В повернута относительно ее положения в первом сочетании АВ на угол
. Системы координат всех трех поверхностей ориентированы так, что в первых трех основных сочетаниях азимуты
обеих плоскостей совпадают (совпадение при
) В четвертом сочетании (повернутом) азимуты
![]() совпадают (совпадение при
совпадают (совпадение при ).
Рисунок 24 - Четыре комбинации поверхностей (вид сверху)
Анализ результирующей интерференционной картины (в соответствии с рисунком 22) позволяет определить искомые отклонения от плоскостности при использовании следующих уравнений:
для АВ |
| (11) | |||
для ВС |
| (12) | |||
для СА |
| (13) | |||
для АВ |
| (14) | |||
Каждое из этих уравнений является исходным для уравнений с
![]() ;
; ![]() ; ...
; ... .
Эти уравнения справедливы и могут быть раздельно решены.
- отклонение от плоскостности поверхности А при азимуте
![]() и, соответственно,
и, соответственно, - то же для поверхности В,
- то же для поверхности С.
(вначале неизвестное) является расстоянием между идеальными опорными плоскостями.
Оптимальная разрешающая способность по глубине и увеличенная поперечная разрешающая способность обеспечиваются применением метода наименьших квадратов для минимизации случайных погрешностей измерений. Средняя квадратическая погрешность измерения отклонения от плоскостности является функцией средней квадратической погрешности результата измерения, требуемого поперечного разрешения и положения поверхности.
В компьютеризованных интерферометрах обычно используются квадратные матричные приемники излучения с центрами отдельных пикселей в вершинах квадратной сетки с известным шагом, поэтому расстояния между неизвестными плоскостями определяются путем прямых измерений (расстояния на рисунке 23). Переход от системы координат, связанной с плоскостями, к системе координат матричного приемника достигается калибровкой и применением локального интерполяционного метода.
6.2.2.2 Для калибровки плоскостей абсолютным методом вращения необходимо соблюсти определенную последовательность операций:
а) Три плоскости А, В, С объединятся попарно в четырех различных положениях в соответствии с рисунком 24 и встраиваются в оптическую схему интерферометра Физо. В каждом из этих положений измеряются и фиксируются расстояния между плоскостями в точках, где производятся измерения.
б) По измеренным расстояниям вычисляются средние значения погрешностей измерений.
в) В случае квадратной или прямоугольной формы матричного приемника результаты интерполируются в полярную систему координат.
г) По полученным в результате интерполяции данным определяются абсолютные значения отклонений от плоскостности (например, на рисунке 23).
д) Затем эти значения представляются в полярных координатах, после чего обратно интерполируются для представления на квадратной или прямоугольной сетке, соответствующей расположению отдельных приемных элементов в матрице приемника.
е) Абсолютные значения отклонений далее обрабатываются с целью определения таких параметров поверхности, как, например, контурные линии, 3D графики, критерии качества и др.
6.2.2.3 Для выполнения операции а) в 6.2.2.2 должны быть соблюдены следующие условия:
а) Контролируемые пластины должны быть смонтированы вертикально, т.е. нормали к поверхностям пластин должны быть горизонтальными. Тогда изменения в прогибе пластин в ходе эксперимента могут не приниматься во внимание. Прогиб может порождать систематические погрешности в тех случаях, когда пластины применяются в другой ориентации, чем во время абсолютной калибровки. Тогда влияние прогиба должно учитываться. Это может быть выполнено путем математического моделирования пластины и вычисления прогиба.
б) Обе контролируемые поверхности, объединенные для соответствующего относительного измерения, должны быть изображены на микрофише камеры. При этом изображения координатных систем одной из этих двух поверхностей и микрофиши должны совпадать. Оси декартовой системы координат микрофиши должны иметь направления, совпадающие с направлениями строк и столбцов матрицы пикселей, а центр этой системы координат должен служить опорным пикселем, предпочтительно расположенным вблизи геометрического центра микрофиши.
в) Для четвертого совмещения пластин (АВ на рисунке 24) вторая пластина в первой основной комбинации должна быть повернута на угол
. Этот поворот должен быть выполнен вокруг нормали к поверхности в начале ее системы координат.
г) Диаметр интерферограммы на микрофише должен быть достаточно большим, превышающим несколько расстояний между пикселями. Значения фазы, измеренные в пикселях внутри этого круга, используются при вычислениях абсолютных значений отклонений от плоскостности.
д) Контролируемые пластины должны обладать достаточной механической и тепловой стойкостью.
Таким образом, в дополнение к условиям а)-г), устанавливающим геометрические соотношения между пластинами и интерферометром, сами пластины должны удовлетворять некоторым требованиям, связанным с их размерами. Они должны быть изготовлены из надлежащего материала, надежно закреплены и термостатированы.
Пример - В таблице 1 приведены значения максимально допустимых отклонений для оптической схемы со следующими параметрами: M=7, N=30, =84°, микрофиш 256х256 пикселей, круглая интерферограмма диаметром 232 пикселя, систематическая погрешность за счет неточной юстировки интерферометра
![]() . Указанный угол поворота
. Указанный угол поворота =84° обеспечивает пространственное разрешение, соответствующее квадратной сетке ~30х30 пикселей, т.е. в результате различимы 500-600 точек поверхности. Для получения еще большего пространственного разрешения при том же уровне точности было добавлено пятое сочетание поверхностей, в котором поверхность В поворачивается на угол
, где
- угол поворота четвертого позиционного сочетания поверхностей в подпункте а) в 6.2.2.2. При выборе N, соответствующего требуемому числу диаметров,
![]() (
( - ближайшее целое число). В результате легко достигается пространственное разрешение 128х128 точек.
Таблица 1 - Максимально допустимые отклонения
Условие | Содержание | Отклонение |
1 | Нормали к горизонтальной поверхности | ±5° |
2 | Совпадение опорного пикселя с изображениями центров координатных систем поверхностей | ±1 пиксель |
3 | Угол поворота | ±0,1° ±1° ±1 пиксель |
6.2.3 Методика Цернике поворота трех плоскостей [5, 20]
Эта методика отличается от описанной в 6.2.2 алгоритмом определения абсолютных значений отклонений от зарегистрированных расстояний между поверхностями (см. пункт а) в 6.2.2.2). Процедура и условия выполнения эксперимента примерно те же, т.е. испытаниям подлежат четыре сочетания поверхностей в положениях, представленных на рисунке 24 с углом поворота плоскости В относительно плоскости А.
Если по аналогии с уравнениями из 6.2.2 отклонения поверхностей обозначить ![]() ,
, ![]() и
и ![]() , а разности между испытуемыми поверхностями в четырех конфигурациях
, а разности между испытуемыми поверхностями в четырех конфигурациях ![]() ,
, ![]() ,
, ![]() и
и ![]() , где
, где ![]() , - координаты измеренных точек
, - координаты измеренных точек , то каждая из приведенных семи функций может быть представлена в виде полиномов Цернике
![]() , (15)
, (15)
где - полярные координаты в единичном круге (
![]() );
);
![]() - радиальные полиномы;
- радиальные полиномы;
,
- коэффициенты, относящиеся к четным (косинус) и нечетным (синус) членам, соответственно.
Сначала вычисляются коэффициенты полиномов Цернике для функций от до
, а по ним - коэффициенты полиномов для функций
![]() путем решения системы линейных уравнений. Затем восстанавливается изображение поверхности в приближении до определенного порядка, т.е. отклонения поверхности характеризуются совокупностью независимых чисел (коэффициентов) в соответствии с выбранным порядком полинома. Число этих коэффициентов лежит обычно в пределах от 40 до 50, что соответствует количеству независимо разрешаемых точек с амплитудами того же порядка. Таким образом, независимо разрешаемыми оказываются от 40 до 50 точек поверхности.
путем решения системы линейных уравнений. Затем восстанавливается изображение поверхности в приближении до определенного порядка, т.е. отклонения поверхности характеризуются совокупностью независимых чисел (коэффициентов) в соответствии с выбранным порядком полинома. Число этих коэффициентов лежит обычно в пределах от 40 до 50, что соответствует количеству независимо разрешаемых точек с амплитудами того же порядка. Таким образом, независимо разрешаемыми оказываются от 40 до 50 точек поверхности.
В качестве примера определения коэффициентов полиномов Цернике для трех поверхностей приведены уравнения для коэффициентов ,
и
, определяющих отклонения, соответственно
![]() ,
, ![]() и
и ![]() ,:
,:
![]() ; (16)
; (16)
![]() ; (17)
; (17)
![]() (18)
(18)
![]() , (19)
, (19)
где ,
,
и
- коэффициенты фокуса для испытуемых сочетаний поверхностей
![]() ,
, ![]() ,
, ![]() и
и ![]() :
:
![]() ; (20)
; (20)![]() ; (21)
; (21)![]() . (22)
. (22)
Аналогична структура уравнений и для других коэффициентов Цернике.
6.3 Сферические поверхности
6.3.1 Общие сведения
Методы интерферометрии, используемые для определения абсолютных отклонений сферических поверхностей от идеальной сферы, по своей сути являются методиками определения сферичности. Главный радиус сферической поверхности не определяется. Радиус может быть измерен другими способами, многократно описанными в технической литературе. В целом это не является проблемой, поскольку в большинстве практически важных случаев погрешность, допустимая при измерении радиуса сферической поверхности, на порядок больше таковой при определении отклонений от сферичности.
В 6.3.2 и 6.3.3 описаны две методики. Трехпозиционная методика (6.3.2) математически описывается простыми соотношениями, но подходит лишь для поверхностей с весьма малыми радиусами кривизны. Методика "вращательного сдвига" (6.3.3) требует большего объема вычислений, но пригодна как для малых, так и для больших, простирающихся до бесконечности, радиусов кривизны и предоставляет широкие возможности для компенсации погрешностей измерений.
6.3.2 Трехпозиционная методика [1, 7]
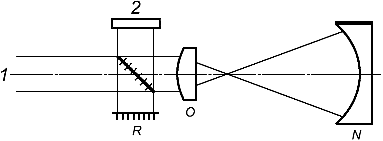
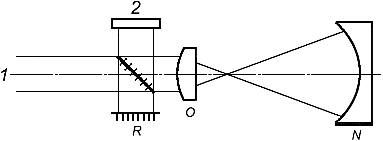
Методика пригодна для использования в оптических схемах интерферометров Физо и Тваймана-Грина. Измерению подлежат абсолютные значения четной и нечетной частей отклонения, получаемые путем оценки трех интерферограмм. Для пояснения сути методики рассмотрим оптическую схему интерферометра Тваймана-Грина с тремя различными положениями контролируемой сферической поверхности, представленными на рисунке 25:
а) Положение a
б) Положение b
в) Положение с
1 - лазер;
2 - камера; - опорная поверхность;
- формирующая оптическая система;
- контролируемая поверхность
Рисунок 25 - Трехпозиционная методика
а) основное положение, поверхность освещается перпендикулярно, а волновой фронт на выходе интерферометра описывается уравнением
![]() ; (23)
; (23)
б) перевернутое положение, поверхность освещается перпендикулярно, будучи повернутой на 180° вокруг оптической оси, а волновой фронт на выходе интерферометра описывается уравнением
![]() ; (24)
; (24)
в) положение "кошачий глаз", вершина поверхности совпадает с фокусом, а волновой фронт на выходе интерферометра описывается уравнением
![]() , (25)
, (25)
где ,
и
описывают волновые аберрации, соответственно, опорного плеча интерферометра, оптической системы, формирующей объектный пучок, и контролируемой поверхности,
![]() - прямоугольные координаты.
- прямоугольные координаты.
Решение приведенной системы уравнений относительно ![]() можно записать в виде
можно записать в виде
![]() . (26)
. (26)
Отклонение поверхности, полученное из уравнения (26), должно быть уменьшено вдвое. Эта методика позволяет определить абсолютные отклонений в точках поверхности, соответствующих выборке точек на приемной поверхности приемника излучения.
6.3.3 Методика "вращательного сдвига"
Методика основана на относительных измерениях, выполняемых с помощью интерферометра Физо или интерферометра Тваймана-Грина для сферического объектного пучка. На рисунке 26 показана оптическая схема интерферометра Физо применительно к рассматриваемому случаю. А и В представляют собой подлежащие измерению два неизвестных сферических стандартных образца или две поверхности эталонов (А - выпуклая, В - вогнутая). Для их освещения используется микрообъектив. Световой поток, отраженный поверхностью А, интерферирует со световым потоком, отраженным поверхностью В. Полученная интерферограмма отображает результаты относительного сравнения этих двух неизвестных поверхностей А и В. Необходимы по крайней мере три такие интерферограммы. На каждой из них поверхность В находится в ином поперечном или вращательном положении по отношению к поверхности А. На рисунке 27 представлены четыре такие конфигурации (наблюдение в направлении распространения света), причем три из них необходимы для реализации методики, а четвертая - для увеличения точности. В каждой из этих конфигураций центры кривизны поверхностей А и В практически совпадают.
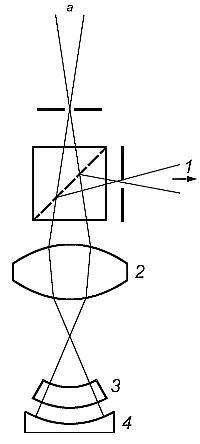
1 - приемник излучения; 2 - микрообъектив; 3 - эталон А; 4 - эталон В; а - излучение лазера
Рисунок 26 - Оптическая схема реализации методики "вращательного сдвига"
|
| |||
а) Первое положение | б) Второе положение | |||
|
| |||
в) Третье положение | г) Четвертое положение | |||
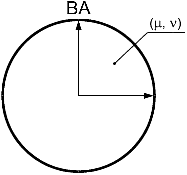
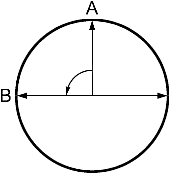
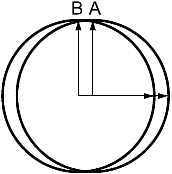
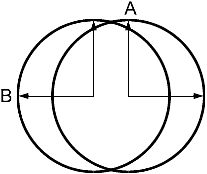
Рисунок 27 - Положения поверхностей при реализации методики "вращательного сдвига"
Полученные четыре интерферограммы подлежат компьютерной обработке. Наилучшие результаты получаются в том случае, когда отношение диаметров контролируемых поверхностей к радиусам их кривизны составляет 1:4.
Это приводит к необходимости применения метода наименьших квадратов для определения отклонений поверхностей А и В от двух идеальных опорных сфер. Решению подлежит приведенная ниже система уравнений, справедливых для точек с координатами в декартовой прямоугольной системе координат в четырех разных положениях:
а) Первое положение
![]() ; (27)
; (27)
б) Второе положение
![]() ; (28)
; (28)
в) Третье положение
![]() ; (29)
; (29)
г) Четвертое положение
![]() ; (30)
; (30)
д) А - сфера (все 4 положения)
![]() ; (31)
; (31)
е) В - сфера (все 4 положения)
![]() . (32)
. (32)
В этих уравнениях - неизвестные и определяемые отклонения поверхности А от идеальной сферы, а
- то же для поверхности В. 4
4 величины
...
- неизвестные юстировочные параметры. Величины
,
,
и
- отрицательные значения промежутков между поверхностями А и В. Уравнения описывают геометрические соотношения между промежутками, разделяющими контролируемые поверхности,
и
- все возможные значения координат. Уравнения (31) и (32) описывают две идеальные сферические поверхности, содержащие аксиальное смещение, наклон и кривизну. Уравнения распространяются на все точки с координатами
. Общее число уравнений достигает, например, 292, если искомые отклонения
и
необходимо определить в 81 точке
любой из поверхностей. В этом случае общее количество неизвестных значений для 2
81 отклонений поверхности при 4
4 юстировочных параметрах составляет 178. Именно такая система линейных уравнений требует решения.
Однако для этого величины ...
в правых частях уравнений должны быть известны. Определяются они в процессе интерферометрических экспериментов, но с неизбежными погрешностями, требующими компенсации.
Это удается сделать, поскольку число уравнений в системах (27)-(32) больше, чем число неизвестных. Поэтому величины ...
также должны удовлетворять определенным условиям линейности:
| |||||
. | |||||
. | (33) | ||||
. | |||||
| |||||
Здесь представлены уравнений (в приведенном выше примере
= 114). Их коэффициенты
определяются по результатам вычислений, выполняемых компьютером. Величины -
являются истинными или, по крайней мере, наиболее вероятными размерами промежутков, разделяющих контролируемые поверхности, причем пока неизвестными, в то время как -
- их измеренные значения. Поэтому величины
определяются в соответствии со следующим утверждением. Они должны аппроксимировать измеренные величины методом наименьших квадратов с предельно возможной точностью, но при условии соответствия их вышеприведенным уравнениям. Математически это утверждение выглядит следующим образом
![]() , (34)
, (34)
где ...
- константы;*
________________
* Текст документа соответствует оригиналу. - .
...
- изменяющиеся величины, но удовлетворяющие вышеупомянутым условиям. Таким образом погрешности измерений (
-
) компенсируются.
Методика будет обладать большими возможностями при введении более четырех взаимных положений контролируемых поверхностей, поворотов на углы, превышающие 90°, большего числа разных смещений и устранении ограничений на размеры апертуры путем использования более сложной системы координат (например, сферических, треугольных).
6.4 Цилиндрические поверхности
6.4.1 Общие сведения
Основные принципы методики абсолютных измерений цилиндричности без использования реальной опорной поверхности были известны еще с 70-х годов [7]. Согласно этой методике интерференционным способом сравнивались попарно три неизвестные цилиндрические поверхности.
Другими методиками предусматривалось использование реальных плоских или сферических опорных поверхностей, предварительно контролируемых по хорошо известным методикам абсолютных измерений [9, 10]. Погрешности измерений плоскостности и сферичности обычно считались пренебрежимо малыми по сравнению с допустимыми погрешностями измерений контролируемых цилиндрических поверхностей. Эти методики предусматривали арифметическое суммирование результатов нескольких специально подобранных относительных измерений. При выполнении каждого относительного измерения контролируемый образец располагался в определенном положении, согласованном с направлением пучка в измерительном плече интерферометра.
6.4.2 Методика измерений цилиндричности с применением зеркала под наклоном [16]
На рисунке 28 показана геометрия эксперимента, иллюстрирующая сущность методики. Цилиндрический волновой фронт WF с неизвестными погрешностями интерферометра, падает не на неизвестную контролируемую поверхность, а на известное плоское зеркало Р, поверхность которого на рисунке 28 представлена "фокальной линией" F. Волновой фронт отражается последовательно под некоторыми углами. Благодаря полученным результатам измерений можно определить погрешности интерферометра, т.е. произвести его калибровку, для чего необходимы, по крайней мере, два угла поворота зеркала.
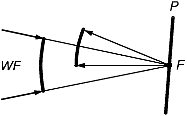
F - фокальная линия; Р - плоское зеркало; WF - волновой фронт
Рисунок 28 - Методика с применением зеркала под наклоном
6.4.3 Методика измерений цилиндричности с помощью крышеобразного зеркала [17]
На рисунке 29 изображена последовательность трех измерений при реализации данной методики. При выполнении измерений I и II цилиндрический образец принимает положение по нормали в измерительном плече интерферометра с цилиндрическим объектным пучком. В промежутке между положениями I и II образец поворачивается на 180° вокруг оптической оси. В положении III (третье измерение) образец замещается крышеобразным зеркалом с углом раскрыва 90°. Вершина "крыши", "фокальная линия" пучка цилиндрического интерферометра и оптическая ось пересекают друг друга под прямыми углами. По результатам измерений определяются погрешности интерферометра и абсолютные значения погрешностей измерений цилиндричности образца. Следовательно, производится калибровка интерферометра, а образец становится стандартным образцом.
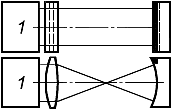
а) Измерение I
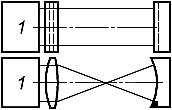
б) Измерение II
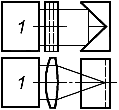
в) Измерение III
1 - интерферометр Тваймана-Грина
Рисунок 29 - Методика измерений цилиндричности с использованием крышеобразного зеркала
6.4.4 Методика испытаний цилиндров большого радиуса [18]
На рисунке 30 представлена последовательность выполнения измерений по данной методике. Прямое измерение может быть направлено на повышение точности измерений. Относительные отклонения цилиндрического образца определяются при выполнении трех измерений, при этом для проведения второго измерения образец поворачивается вокруг оси цилиндра на небольшой угол по отношению к его начальному положению и на 180° относительно положения при первом измерении при выполнении третьего измерения. Ось вращения при третьем измерении совпадает с оптической осью интерферометра. При выполнении четвертого измерения путем смещения образца вдоль оси цилиндра измеряются относительные значения его отклонений от цилиндричности. При выполнении пятого измерения определяются абсолютные отклонения участка падающего волнового фронта вдоль прямой линии, параллельной оси цилиндра. При этом учитываются известные абсолютные отклонения от плоской поверхности зеркала, располагаемого на пути падающего пучка. Для этого зеркало должно отражать пучки соответствующего участка волнового фронта.
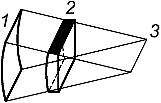
а) Измерение I
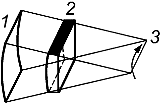
б) Измерение II
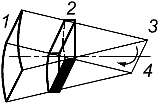
в) Измерение III
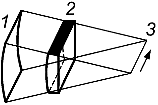
г) Измерение IV
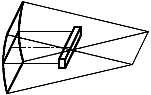
д) Измерение V (вспомогательное)
1 - контролируемый цилиндрический волновой фронт; 2 - контролируемая цилиндрическая поверхность; 3 - "фокальная линия"; 4 - ось вращения
Рисунок 30 - Методика испытаний цилиндров большого радиуса
6.5 Прозрачные оптические окна
Абсолютные измерения волновых аберраций оптического окна могут быть выполнены путем вычисления разности показаний интерферометра без образца и с введенным в него оптическим окном. При этом обратное рассеяние устраняется легким наклоном последнего.
Библиография
[I] Jensen A.E. Absolute calibration method for laser Twyman-Green wave-front testing interferometers, J. Opt. Soc. Am., 63, 1973, p. 1313
[2] Evans C.J. and Kestner R.N. Test optics error removal. Appl. Optics, 35, 1995, p. 7
[3] Freimann R., ![]() В. and
В. and ![]() F. Absolute measurement of noncomatic aspheric surface errors, Opt. Comm., 161, 1999, pp. 106-114
F. Absolute measurement of noncomatic aspheric surface errors, Opt. Comm., 161, 1999, pp. 106-114
[4] ![]() B. Evaluation of rotational symmetric surface deviations by means of average radial profile, Proc. SPIE, 3739, 1999, pp. 474-479
B. Evaluation of rotational symmetric surface deviations by means of average radial profile, Proc. SPIE, 3739, 1999, pp. 474-479
[5] Malacara D. (ed.). Optical shop testing, John Wiley and Sons, New York, 1991
[6] Goodman J.W. Introduction to Fourier Optics, McGraw-Hill, New York, 1968
[7] Schulz G. and Schwider J. Interferometric testing of smooth surfaces. Progr. in Optics, 13, pp. 92-167, E. Wolf (ed.), North-Holland, Amsterdam, 1976
[8] Creath K. and Wyant J.C. Use of computer generated holograms in optical testing. Handbook of Optics, Vol. II, ch.13, McGraw-Hill, New York, 1995
[9] Loomis J.S. Computer-generated Holography and Optical Testing. Opt. Eng., 19, 1980, pp. 679-685
[10] Lesem L.B., Hirsch P.M. and Jordan J.A. IBMJ. Res. Develop., 13, 1969, p. 150
[11] Leith E.N. and Upatnieks J. Recent Advances in Holography. Progr. in Optics, 6, pp. 1-52, E. Wolf (ed.), North-Holland, Amsterdam, 1967
[12] Schwider J. and Burow R. Holographic comparison of smooth surfaces. Proc. of the 2. Internationale Tagung Laser und ihre Anwendungen, К 88, Dresden, 1973
[13] Leith E.N. and Upatnieks J. J. Opt. Soc. Am., 56, 1966, p. 523
[14] Schwider J. Characterisation of interconnection components, pp. 109-148, in Perspectives for parallel optical interconnects, Lalanne and Chavel (eds.), Springer, Berlin, 1991
[15] Elssner K.-E., Grzanna J. and Schulz G. Interference ![]() von
von ![]() . Opt. Acta, 27, 1980, pp. 563-580
. Opt. Acta, 27, 1980, pp. 563-580
[16] Schulz G., Blumel Т., Kafka R., Elssner K.-E., Vogel, A. Calibration of an interferometer for testing cylindrical surfaces. Opt. Comm., 117, 1995, pp. 512-520
[17] ![]() Т., Elssner K.-E., Kafka R., Schulz G., Vogel A. Absolute interferometric testing of cylindrical surfaces. Proc. SPIE, 2340, 1994, pp. 250-257
Т., Elssner K.-E., Kafka R., Schulz G., Vogel A. Absolute interferometric testing of cylindrical surfaces. Proc. SPIE, 2340, 1994, pp. 250-257
[18] Elssner K.-E., ![]() Т., Burow R., Kafka R., Schulz G., Vogel A. Proc. Int. Symposium on Laser in Precision Measurements,
Т., Burow R., Kafka R., Schulz G., Vogel A. Proc. Int. Symposium on Laser in Precision Measurements, ![]() , Hungary, Akademie Verlag Berlin, 1996, p. 74-81
, Hungary, Akademie Verlag Berlin, 1996, p. 74-81
[19] Briers J.D. Interferometric optical testing: An interlaboratory comparison. J. Opt. A: Pure Appl. Opt, 1, 1999, pp. 1-14
[20] Fritz B.S. Absolute calibration of an optical flat, Opt. Eng., 23, 1984, pp. 379-383
[21] Guide to the expression of uncertainty in measurement (GUM), BIPM, IEC, IFCC, ISO, IUPAC, IUPAP, OIML, 1993, corrected and reprinted in 1995
Электронный текст документа
и сверен по:
, 2013
