ГОСТ Р 60.6.3.15-2021/ИСО 18646-2:2019
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РАБОЧИЕ ХАРАКТЕРИСТИКИ И СООТВЕТСТВУЮЩИЕ МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ
Часть 2
Навигация
Robots and robotic devices. Performance criteria and related test methods for service mobile robots. Part 2. Navigation
ОКС 25.040.30
Дата введения 2022-03-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) совместно с Обществом с ограниченной ответственностью "Открытая Робототехника" (ООО "Открытая Робототехника") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 11 ноября 2021 г. N 1490-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 18646-2:2019* "Робототехника. Рабочие характеристики и соответствующие методы испытаний сервисных роботов. Часть 2. Навигация" (ISO 18646-2:2019 "Robotics - Performance criteria and related test methods for service robots - Part 2: Navigation", IDT).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисных мобильных роботов. Он идентичен международному стандарту ИСО 18646-2:2019, разработанному техническим комитетом ИСО/ТК 299 "Робототехника".
1 Область применения
Настоящий стандарт определяет навигационные характеристики сервисных мобильных роботов и методы испытаний для их оценки. К навигационным характеристикам относят погрешность и повторяемость отработки пространственного расположения робота, а также способность обнаруживать и обходить препятствия. Существуют и другие навигационные характеристики, но они выходят за рамки области применения настоящего стандарта.
Рабочие характеристики и соответствующие методы испытаний, установленные в настоящем стандарте, применимы только к мобильным платформам, находящимся в контакте с поверхностью перемещения. Для оценки рабочих характеристик манипуляторов применяют ИСО 9283.
В настоящем стандарте установлены методы испытаний для закрытых помещений. Однако данные методы испытаний могут также быть применимы и к роботам, перемещающимся на открытом воздухе, как это показано в приложении А.
Область применения настоящего стандарта не распространяется на верификацию или валидацию требований безопасности, а также на требования безопасности персонала, проводящего испытания.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание, для недатированных - последнее издание ссылочного стандарта (включая все изменения)]:
ISO 7176-13, Wheelchairs - Part 13: Determination of coefficient of friction of test surfaces (Кресла-коляски. Часть 13. Определение коэффициента трения испытательных поверхностей)
ISO 8373:2012, Robots and robotic devices - Vocabulary (Роботы и робототехнические устройства. Словарь)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 8373, а также следующие термины с соответствующими определениями.
ИСО и МЭК ведут терминологические базы данных для использования в стандартизации по следующим адресам:
- платформа онлайн-просмотра ИСО: доступна на http://www.iso.org/obp;
- Электропедия МЭК: доступна на http://www.electropedia.org.
3.1 робот (robot): Программируемый исполнительный механизм, обладающий определенной степенью автономности и способный перемещаться во внешней среде с целью выполнения задач по назначению.
Примечание 1 - В состав робота входит система управления и интерфейс системы управления.
Примечание 2 - Классификация роботов на промышленных роботов или сервисных роботов (3.4) осуществлена в соответствии с их назначением.
[ИСО 8373:2012, статья 2.6, модифицировано - слова "исполнительный механизм, программируемый по двум или более степеням подвижности" заменены словами "программируемый исполнительный механизм"]
3.2 мобильный робот (mobile robot): Робот (3.1), способный передвигаться под своим собственным управлением.
Примечание - Мобильный робот может быть мобильной платформой (3.3) с манипуляторами или без них.
[ИСО 8373:2012, статья 2.13]
3.3 мобильная платформа (mobile platform): Совокупность всех компонентов мобильного робота (3.2), обеспечивающих его передвижение.
Примечание 1 - Мобильная платформа может включать шасси, которое может быть использовано для поддержки нагрузки (3.6).
Примечание 2 - Из-за возможной путаницы с термином "основание" не рекомендуется использовать термин "мобильное основание" для обозначения мобильной платформы.
[ИСО 8373:2012, статья 3.18]
3.4 сервисный робот (service robot): Робот (3.1), который выполняет задания, полезные для человека или оборудования, за исключением применений в целях промышленной автоматизации.
Примечание 1 - К применениям в целях промышленной автоматизации относятся, но не ограничиваются ими, производство, контроль, упаковка и сборка.
Примечание 2 - Если шарнирные роботы, используемые на производственных линиях, относятся к промышленным роботам, то похожие шарнирные роботы, используемые для подачи еды, относятся к сервисным роботам.
[ИСО 8373:2012, статья 2.10]
3.5 навигация (navigation): Определение и контроль направления перемещения, установленного на основе локализации и карты внешней среды.
Примечание - Навигация может включать планирование маршрута (3.14) для перемещения от точки к точке и полный обзор рабочей области.
[ИСО 8373:2012, статья 7.6]
3.6 нагрузка (load): Силы и/или моменты, воздействующие на механический интерфейс или мобильную платформу (3.3), которые могут быть приложены по разным направлениям движения при заданных значениях скорости и ускорения.
Примечание - Нагрузка является функцией массы, момента инерции, а также статических и динамических сил, воздействующих на робота (3.1).
[ИСО 8373:2012, статья 6.2.1]
3.7 номинальная нагрузка (rated load): Максимальная нагрузка (3.6), которая может быть приложена к механическому интерфейсу или мобильной платформе (3.3) при нормальных условиях эксплуатации (3.9) без ухудшения технических характеристик.
Примечание - Номинальная нагрузка, где это применимо, включает инерционное влияние рабочего органа, вспомогательного оборудования и перемещаемой детали.
[ИСО 8373:2012, статья 6.2.2]
3.8 номинальная скорость (rated speed): Максимальная скорость мобильной платформы (3.3), движущейся с номинальной нагрузкой (3.7) при нормальных условиях эксплуатации (3.9).
[ИСО 18646-1:2016, статья 3.11]
3.9 нормальные условия эксплуатации (normal operating conditions): Диапазон условий внешней среды и других параметров, которые могут влиять на технические характеристики робота (3.1) (например, нестабильность источника электропитания, электромагнитные поля), в рамках которого поддерживаются технические характеристики робота (3.1), указанные изготовителем.
Примечание - К условиям внешней среды относятся температура и влажность.
[ИСО 8373:2012, статья 6.1]
3.10 программа выполнения задания (task program): Совокупность команд, определяющих движения и выполнение других функций, которые формируют конкретное задание для робота (3.1) или робототехнического комплекса.
Примечание 1 - Данный тип программы обычно создают после установки робота и ее может модифицировать обученный специалист под определенные условия.
Примечание 2 - Задание определяет конкретные действия в рамках области применения, под которой понимается обобщенное поле деятельности.
[ИСО 8373:2012, статья 5.1.1]
3.11 пространственное расположение (pose): Комбинация позиции и ориентации в пространстве.
Примечание 1 - Под пространственным расположением манипулятора обычно понимают позицию и ориентацию рабочего органа или механического интерфейса.
Примечание 2 - Пространственное расположение мобильного робота (3.2) может включать совокупность пространственных расположений мобильной платформы (3.3) и любого манипулятора, установленного на мобильной платформе, относительно глобальной системы координат.
Примечание 3 - Для мобильных роботов, находящихся в контакте с плоской поверхностью, ориентацию обычно определяет скалярный угол относительно нормали к плоской поверхности, отсчитываемый от опорного направления.
[ИСО 8373:2012, статья 4.5, модифицировано - добавлено примечание 3]
3.12 заданное пространственное расположение (command pose): Пространственное расположение (3.11), заданное программой выполнения задания (3.10).
[ИСО 8373:2012, статья 4.5.1]
3.13 фактическое пространственное расположение (attained pose): Пространственное расположение (3.11), достигнутое роботом (3.1) при отработке заданного пространственного расположения (3.12).
[ИСО 8373:2012, статья 4.5.2]
3.14 маршрут (path): Упорядоченное множество пространственных расположений (3.11).
[ИСО 8373:2012, статья 4.5.4]
3.15 кластер (cluster): Множество измеренных точек, используемых для расчета точности и повторяемости характеристик.
[ИСО 9283:1998, статья 3.1, модифицировано]
3.16 центр тяжести (barycentre): Точка, координаты которой равны средним значениям кластера (3.15) точек.
[ИСО 9283:1998, статья 3.2, модифицировано]
4 Условия проведения испытаний
4.1 Общие положения
Робот должен быть собран, полностью заряжен и работоспособен в соответствии со спецификацией изготовителя. Все тесты самодиагностики должны быть успешно выполнены. Следует обеспечить необходимые меры безопасности персонала во время испытаний.
Испытаниям должна предшествовать подготовка робота к эксплуатации, установленная изготовителем. Проделанная подготовка должна быть отражена в протоколе испытаний.
При проведении испытаний, установленных в настоящем стандарте, должны быть соблюдены все условия, определенные в данном разделе, если иное не указано в конкретных пунктах.
Каждое испытание, установленное в настоящем стандарте, может предусматривать разные тестовые конфигурации, для которых необходимы разные методики проведения испытания. Для каждой тестовой конфигурации может потребоваться выполнение нескольких попыток, если это определено в методике проведения испытания.
4.2 Условия окружающей среды
Во время проведения всех испытаний следует поддерживать следующие условия окружающей среды:
- температура окружающей среды: от 10°С до 30°С;
- относительная влажность: от 0% до 80%;
- освещенность: от 100 до 1000 лк.
Условия окружающей среды должны быть указаны в протоколе испытаний. Изготовитель может задать условия окружающей среды, выходящие за пределы данных диапазонов (см. приложение А).
Примечание - Даже если отражающая способность поверхности перемещения может повлиять на рабочие характеристики, она не включена в данные условия окружающей среды.
4.3 Состояние поверхности перемещения
Для проведения испытаний следует использовать твердую и ровную горизонтальную поверхность перемещения с коэффициентом трения в диапазоне от 0,6 до 1,0, измеренным согласно ИСО 7176-13.
4.4 Условия эксплуатации
Все рабочие характеристики должны быть измерены при нормальных условиях эксплуатации. Если характеристики измеряют при других условиях, то это должно быть указано в протоколе испытаний.
Во всех испытаниях робота* должен двигаться с номинальной скоростью и при номинальной нагрузке, если не указано иное.
Для навигации мобильных роботов должно быть установлено внешнее оборудование, например ориентиры, если это необходимо по техническим условиям изготовителя. Информация о внешнем оборудовании, например о местоположении и типах ориентиров, должна быть занесена в протокол испытаний.
4.5 Маршруты перемещения
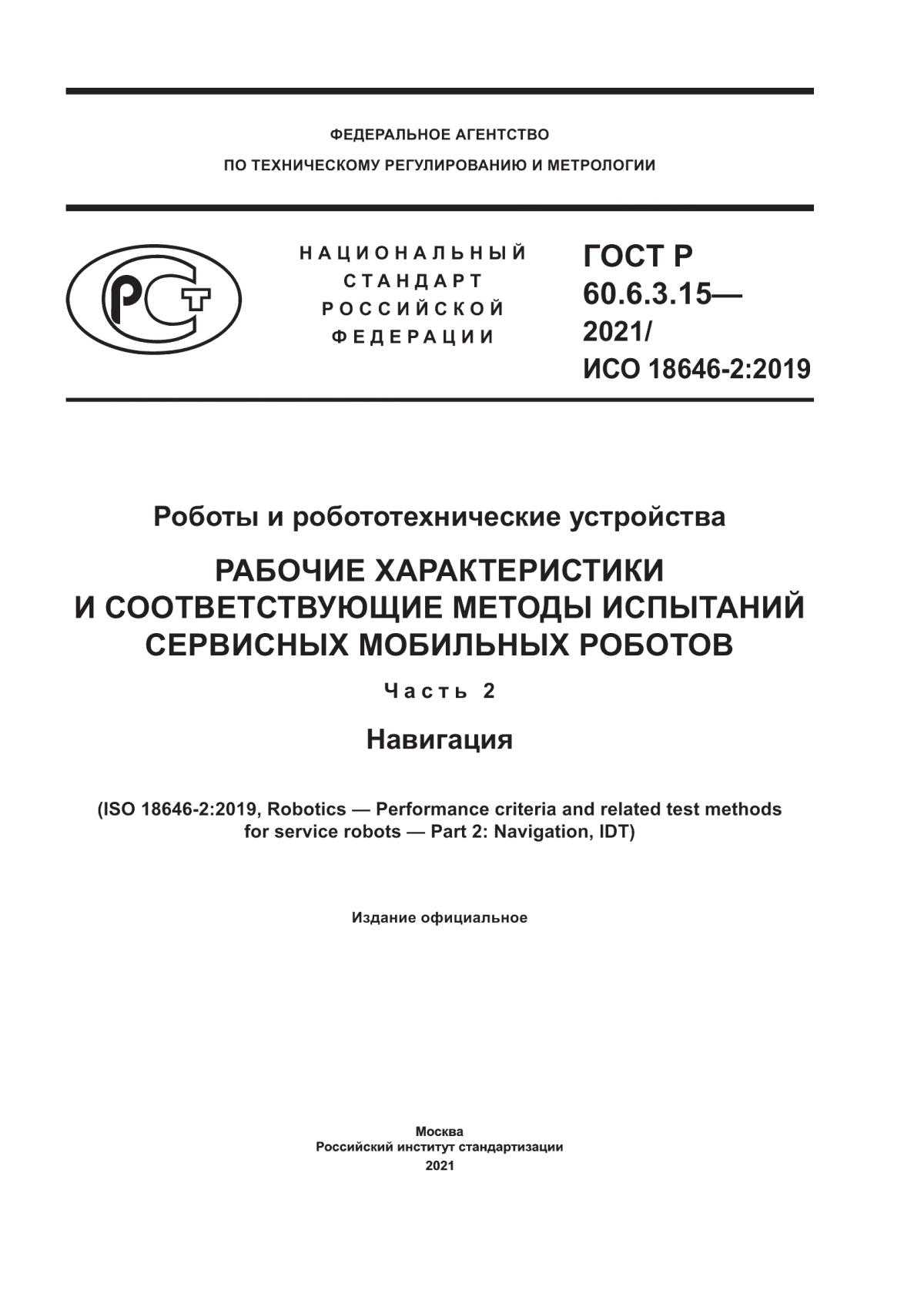
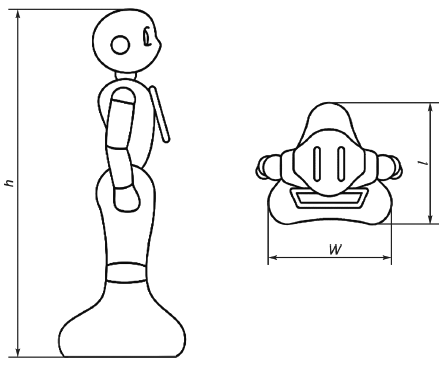 |
Рисунок 1 - Габариты мобильного робота
 |
Рисунок 2 - Прямолинейный маршрут
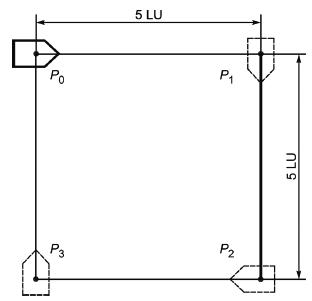 |
Рисунок 3 - Прямоугольный маршрут
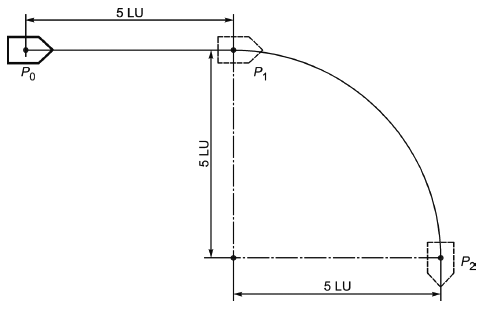 |
Рисунок 4 - Комбинированный маршрут
5 Определение характеристик отработки пространственного расположения
5.1 Цель
Целью данного испытания является определение характеристик отработки пространственного расположения, к которым относятся погрешность и повторяемость отработки пространственного расположения. Погрешность и повторяемость отработки пространственного расположения характеризуют способность робота достигать заданного пространственного расположения.
5.2 Рабочие характеристики
5.2.1 Погрешность отработки пространственного расположения
Погрешность отработки пространственного расположения подразделяют:
a) на погрешность отработки позиции, за которую принимают разницу между позицией заданного пространственного расположения и центром тяжести фактических позиций, как показано на рисунке 5;
b) погрешность отработки ориентации, за которую принимают разницу между ориентацией заданного пространственного расположения и средним значением фактических ориентаций, как показано на рисунке 6.
 |
Рисунок 5 - Погрешность отработки позиции
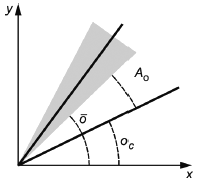 |
Рисунок 6 - Погрешность отработки ориентации
Погрешность отработки позиции вычисляют по формуле:
Погрешность отработки ориентации вычисляют по формуле
и где абсолютное значение затем пересчитывают в диапазоне (-180, +180).
5.2.2 Повторяемость отработки пространственного расположения
Повторяемость отработки пространственного расположения подразделяют на:


5.3 Испытательный стенд
Испытательный стенд должен быть оборудован измерительной системой, обеспечивающей измерение позиции и ориентации робота с достаточной точностью, соответствующей использованию робота по назначению, например системой с 3D-камерой или лазерным измерительным устройством. Тип и точность измерительной системы должны быть указаны в протоколе испытаний.
Для данного испытания используют прямолинейный, прямоугольный и комбинированный маршруты.
5.4 Методика проведения испытания
Данное испытание состоит из шести тестовых конфигураций, соответствующих перемещению робота по прямолинейному, прямоугольному и комбинированному маршруту без нагрузки и с номинальной нагрузкой. При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
b) мобильному роботу посылают команду следовать по маршруту автономно с номинальной скоростью;
c) когда робот достигает цели, его позицию и ориентацию измеряют с помощью внешней измерительной системы.
Испытание повторяют по 30 раз для каждого маршрута и состояния нагрузки. Погрешность отработки позиции, погрешность отработки ориентации, повторяемость отработки позиции и повторяемость отработки ориентации рассчитывают на основе полученных данных.
5.5 Результаты испытания
Полученные характеристики пространственного расположения (погрешность отработки позиции, погрешность отработки ориентации, повторяемость отработки позиции и повторяемость отработки ориентации) должны быть указаны в протоколе испытаний. Протокол испытаний должен также содержать конкретные условия проведения испытаний, включая коэффициент трения поверхности перемещения, номинальную скорость робота и номинальную нагрузку. Пример оформления результатов испытания в протоколе приведен в таблице 1.
Таблица 1 - Протокол испытаний
Характеристика | Прямолинейный маршрут | Прямоугольный маршрут | Комбинированный маршрут | |||
| Без нагрузки | Номинальная нагрузка | Без нагрузки | Номинальная нагрузка | Без нагрузки | Номинальная нагрузка |
Погрешность отработки позиции | ||||||
Погрешность отработки ориентации | ||||||
Повторяемость отработки позиции | ||||||
Повторяемость отработки ориентации | ||||||
6 Обнаружение препятствия
6.1 Цель
Целью данного испытания является определение способности мобильных роботов обнаруживать препятствия и измерять расстояния до препятствий из разных материалов и различной формы. Тестовые параметры основаны на указанных изготовителем минимальном и максимальном расстояниях обнаружения. Робот не обязательно должен распознать вид препятствия.
6.2 Испытательный стенд
Для проведения испытания необходим достаточно большой участок для размещения робота и препятствий на максимальном расстоянии между ними, указанном изготовителем, как показано на рисунке 7. Между роботом и препятствиями не должно быть никаких преград. На стенах испытательного стенда не должно быть никаких маркеров, помогающих роботу.
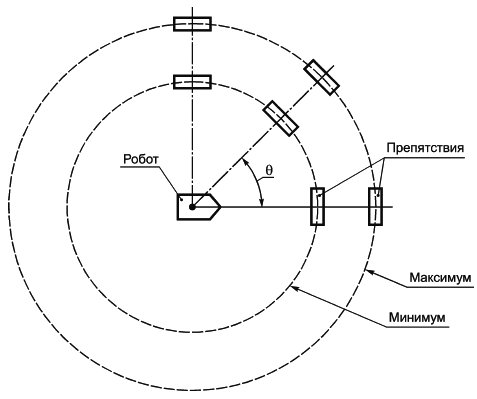 |
Рисунок 7 - Компоновка испытательного стенда для обнаружения препятствий
Спецификации препятствий для данного испытания приведены в таблице 2.
Таблица 2 - Спецификации препятствий
Наименование | Геометрия | Описание |
Стена |  | Щит, имитирующий сегмент стены (сосновый деревянный щит и неокрашенное натриево-кальциево-силикатное стекло с коэффициентом пропускания более 80%) Высота h: 1,5 м Ширина w: 1 м |
Стол |  | Щит на четырех ножках, имитирующий стол (деревянные и стальные ножки) Высота h: от 0,7 м до 0,8 м Ширина w: от 1,5 м до 2,0 м Глубина d: от 0,5 м до 0,8 м Толщина ножек и щита t: <0,05 м |
Большой цилиндр |  | Большой закрытый цилиндр, имитирующий туловище человека (серая поверхность с коэффициентом диффузного отражения от 27% до 33%, в соответствии с IEC/TS 61496-4-3) Высота h: 0,6 м Диаметр d: 0,2 м (см. ИСО 13856-3) |
Малый цилиндр |  | Малый закрытый цилиндр, имитирующий руку или ногу человека (серая поверхность с коэффициентом диффузного отражения от 27% до 33%, в соответствии с IEC/TS 61496-4-3) Высота h: 0,4 м Диаметр d: 0,07 м (см. ИСО 13856-3) |
6.3 Методика проведения испытания
Данное испытание состоит из шести тестовых конфигураций, включающих деревянную стену, стеклянную стену, деревянный стол, металлический стол, большой цилиндр и малый цилиндр, как показано в таблице 2. При выполнении каждой попытки необходимо соблюдать следующую процедуру:
a) мобильного робота помещают в исходное пространственное расположение;
b) препятствие размещают на максимальном расстоянии, указанном изготовителем, и робот измеряет расстояние до препятствия;
c) препятствие перемещают на указанное минимальное расстояние, и робот измеряет расстояние до препятствия;
d) шаги b) и c) повторяют с препятствием, размещенным на линии, проходящей под углом 45° против часовой стрелки к направлению, в котором ориентирован робот. Угол увеличивают последовательно на 45° каждый раз, когда выполнение процедуры доходит до шага d). Когда линия, на которой размещают препятствия, пройдет полный круг, выполнение процедуры заканчивают. Препятствие всегда ориентируют так, чтобы его наибольшая сторона была обращена к роботу. Вместо перемещения препятствия, можно перемещать робота, обеспечивая необходимое расположение препятствия.
6.4 Результаты испытания
Для каждого препятствия, расположенного на разных позициях относительно робота на минимальном и максимальном расстоянии, в протоколе испытания должно быть указано, обнаружил ли робот препятствие. Для каждой попытки вычисляют точность определения расстояния, на котором робот обнаружил препятствие. Точность выражают в процентах относительно реального расстояния от робота до препятствия. Среднюю точность вычисляют как среднее значение точностей, полученных на каждой попытке. Конкретные условия проведения испытания, включая размеры и цвет препятствий, и результаты испытания должны быть указаны в протоколе испытаний с использованием таблицы 3 для всех препятствий, определенных в 6.2.
Таблица 3 - Результаты испытания
Препятствие | Расстояние до препятствия | Угол поворота против часовой стрелки, градусы | Расстояние, измеренное роботом, м | Точность, % | Средняя точность, % |
Виды препятствий (с указанием размера и цвета) | Минимальное | 0 | |||
|
| 45 | |||
|
| 90 | |||
|
| 135 | |||
|
| 180 | |||
|
| 225 | |||
|
| 270 | |||
|
| 315 | |||
| Максимальное | 0 | |||
|
| 45 | |||
|
| 90 | |||
|
| 135 | |||
|
| 180 | |||
|
| 225 | |||
|
| 270 | |||
|
| 315 |
7 Обход препятствий
7.1 Цель
Целью данного испытания является определение способности робота предотвращать столкновение со статическим или динамическим препятствиями либо с помощью остановки, либо с помощью надлежащего маневра по его обходу. В случае остановки предполагается, что робот остановится до того, как произойдет физический контакт между препятствием и любой частью робота. В случае маневра по обходу препятствия необходимо постоянно поддерживать минимальное расстояние между препятствием и любой частью робота, указанное изготовителем.
7.2 Испытательный стенд
Для проведения данного испытания используют препятствия, указанные в таблице 2.
Мобильного робота помещают на исходную позицию, расположенную на расстоянии 9 LU от конечной позиции на ровном полу, как показано на рисунке 8. Статические и динамические препятствия со следующими алгоритмами поведения показаны на рисунке 8:
- алгоритм поведения 1: неподвижное препятствие размещают между исходной и конечной позициями робота;
В качестве препятствия с алгоритмом поведения 1 следует использовать следующие объекты из таблицы 2:
a) деревянная сосновая стена, установленная прямо и обращенная своей большей поверхностью к роботу;
b) стол, обращенный к роботу своей более длинной стороной;
c) большой цилиндр, лежащий на боковой стороне и обращенный этой стороной к роботу;
d) малый цилиндр, стоящий прямо.
В качестве препятствия с алгоритмами поведения 2, 3 и 4 следует использовать следующие объекты из таблицы 2:
a) большой цилиндр, перемещающийся прямо на высоте 0,5 м над землей;
b) малый цилиндр, перемещающийся прямо по земле.
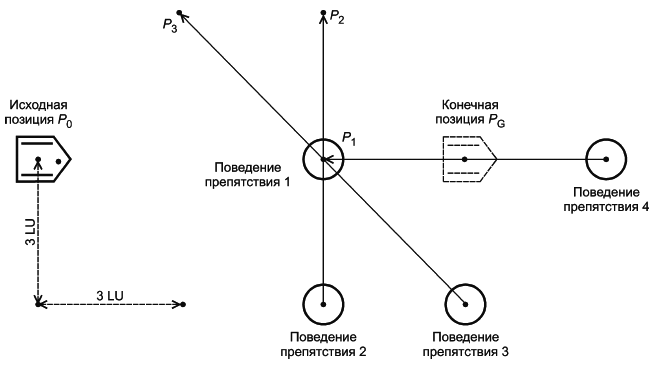 |
Рисунок 8 - Схема испытательного стенда и алгоритмы поведения препятствия (вид сверху)
7.3 Методика проведения испытания
Данное испытание предусматривает десять тестовых конфигураций, представленных выше. При выполнении каждой попытки необходимо соблюдать следующую процедуру:
c) когда робот достигает конечной позиции, регистрируют время, затраченное на перемещение.
7.4 Результат испытания
Для каждой тестовой конфигурации в протоколе испытания должно быть зарегистрировано, был ли обход препятствия успешным или нет. Конкретные условия проведения испытания, включая размеры и цвет препятствий, а также время перемещения и коэффициент задержки должны быть указаны в протоколе испытания с использованием таблицы 4.
Таблица 4 - Результаты испытания
Алгоритм поведения препятствия | Препятствие | Успех/Неудача | Время перемещения, с | Коэффициент задержки |
Алгоритм поведения 1 | Деревянная сосновая стена |
|
|
|
Стол |
|
|
| |
Большой цилиндр | ||||
Малый цилиндр | ||||
Алгоритм поведения 2 | Большой цилиндр | |||
Малый цилиндр | ||||
Алгоритм поведения 3 | Большой цилиндр | |||
Малый цилиндр | ||||
Алгоритм поведения 4 | Большой цилиндр | |||
Малый цилиндр |
Приложение А
(справочное)
Навигация на открытой местности
А.1 Общие положения
Настоящее приложение предназначено для разъяснения использования настоящего стандарта для оценки навигационных характеристик мобильных роботов, работающих в условиях открытой местности.
Представленные испытания применимы также к помещениям, в которых нормальные условия эксплуатации или состояния поверхности перемещения отличаются от условий, указанных в 4.2 и 4.3.
А.2 Выбор колес
Навигационные характеристики мобильных роботов, предназначенных для использования на открытой местности, во многом зависят от сопротивления качению колес.
Прежде, чем приступить к испытаниям в соответствии с разделами 5, 6 и 7, следует выбрать колеса, наиболее подходящие для условий внешней среды.
А.3 Условия испытаний
А.3.1 Общие положения
Все условия испытаний, установленные в разделе 4, применимы для испытаний на открытой местности за исключением нижеследующего.
А.3.2 Условия внешней среды
Вместо положений, установленных в 4.2, испытания следует проводить при типовых условиях внешней среды для местности, в которой запланировано использование мобильного робота.
А.3.3 Состояния поверхности перемещения
Вместо положений, установленных в 4.3, испытания следует проводить при тех состояниях поверхности перемещения, которые определены как нормальные состояния для открытой местности.
А.4 Характеристики пространственного расположения
Мобильный робот, предназначенный для использования на открытой местности, должен быть испытан с использованием методов, определенных в разделе 5.
Для проведения испытаний на открытой местности в соответствии с разделом 5 также подходит надлежащее GPS оборудование, имеющее точность измерения, необходимую для проведения линейных измерений с погрешностью ±0,5%.
А.5 Обнаружение и обход препятствий на открытой местности
А.5.1 Общие положения
Мобильный робот, предназначенный для использования на открытой местности, должен быть испытан на обнаружение и обход препятствий с помощью методов, установленных в разделах 6 и 7. К этим методам следует применить описанные ниже изменения для оценки обнаружения и обхода препятствий мобильными сервисными роботами, предназначенными для использования на открытой местности.
А.5.2 Типы препятствий
Для оценки обнаружения и обхода препятствий мобильными сервисными роботами, предназначенными для работы на открытой местности, следует использовать малый цилиндр, большой цилиндр и стену в соответствии с таблицей 2.
Стол и неокрашенное натриево-кальциево-силикатное стекло, представленные в таблице 2, не следует использовать для оценки обнаружения и обхода препятствий мобильными сервисными роботами на открытой местности.
А.5.3 Порядок проведения испытаний
Порядок проведения испытаний, установленный в 6.3 и 7.3, должен быть применен для всех заданных внешних условий и состояний поверхности перемещения.
А.5.4 Результаты испытаний
Протоколы испытаний, установленные в 6.4 и 7.4, должны быть составлены для всех заданных внешних условий и состояний поверхности перемещения.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта (документа) | Степень соответствия | Обозначение и наименование соответствующего национального или межгосударственного стандарта |
ISO 7176-13 | IDT | ГОСТ Р ИСО 7176-13-96 "Кресла-коляски. Методы испытаний для определения коэффициента трения испытательных поверхностей" |
ISO 8373:2012 | IDT | ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 "Роботы и робототехнические устройства. Термины и определения" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | ISO 9283:1998 , Manipulating industrial robots - Performance criteria and related test methods |
________________ Действует ГОСТ Р 60.3.3.1-2016/ИСО 9283:1998 "Роботы промышленные манипуляционные. Рабочие характеристики и соответствующие методы тестирования". | |
[2] | ISO 13482 , Robots and robotic devices - Safety requirements for personal care robots |
________________ Действует ГОСТ Р 60.2.2.1-2016/ИСО 13482:2014 "Роботы и робототехнические устройства. Требования безопасности для роботов по персональному уходу". | |
[3] | ISO 13856-3, Safety of machinery - Pressure-sensitive protective devices - Part 3: General principles for design and testing of pressure-sensitive bumpers, plates, wires and similar devices |
[4] | ISO 18646-1:2016 , Robotics - Performance criteria and related test methods for service robots - Part 1: Locomotion for wheeled robots |
________________ Действует ГОСТ Р 60.6.3.14-2019/ИСО 18646-1:2016 "Роботы и робототехнические устройства. Рабочие характеристики и соответствующие методы испытаний сервисных мобильных роботов. Часть 1. Передвижение колесных роботов". | |
[5] | IEC/TS 61496-4-3, Safety of machinery - Electro-sensitive protective equipment - Part 4-3: Particular requirements for equipment using vision based protective devices (VBPD) - Additional requirements when using stereo vision techniques (VBPDST) |
[6] | ASTM F3244-17, Standard Test Method for Navigation: Defined Area |
УДК 621.865:8:007.52:006.86:006.354 | ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, рабочие характеристики, методы испытаний, сервисные роботы, мобильные роботы, навигация | |
