ГОСТ Р ИСО 8373-2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
РОБОТЫ И РОБОТОТЕХНИЧЕСКИЕ УСТРОЙСТВА
Термины и определения
Robots and robotic devices. Vocabulary
ОКС 01.040.25
25.040.30
Дата введения 2016-01-01
Предисловие
1 ПОДГОТОВЛЕН ООО "НИИ экономики связи и информатики "Интерэкомс" (ООО "НИИ "Интерэкомс") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 100 "Стратегический и инновационный менеджмент"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 26 ноября 2014 г. N 1863-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 8373:2012* "Роботы и роботизированные устройства. Термины и определения" (ISO 8373:2012 "Robots and robotic devices - Vocabulary", IDT)
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Январь 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт определяет терминологию, используемую в робототехнике и роботизированных устройствах, применяемых как в промышленной, так и непромышленной сферах. Настоящий стандарт содержит определения наиболее часто используемых терминов, которые сгруппированы по разделам в соответствии с основными направлениями робототехники.
1 Область применения
Настоящий стандарт определяет термины, используемые по отношению к роботам и роботизированным устройствам, работающим как в промышленных, так и непромышленных областях.
2 Общие термины
В настоящем стандарте используются следующие термины с соответствующими определениями:
2.1 манипулятор (manipulator): Машина, механизм которой обычно состоит из последовательности сегментов. Сегменты могут быть соединены, а могут перемещаться относительно друг друга. Они могут захватывать и (или) перемещать объекты (заготовки или инструменты) с некоторой степенью свободы (4.4).
Примечание 1 - Манипулятор может управляться оператором (2.17), программируемым электронным контроллером или логической системой (например, кулачковым устройством, проводным устройством и т.п.).
Примечание 2 - В состав манипулятора рабочий орган робота (3.11) не включается.
2.2 автономность (autonomy): Способность выполнять задачи по предназначению, основанная на текущем состоянии изделия и особенностях считывания данных без вмешательства человека.
2.3 физическое преобразование (physical alteration): Преобразование механической системы.
Примечание - Механические системы не включают среду хранения информации, оперативную память и т.д.
2.4 перепрограммируемый (reprogrammable): Механизм, работающий таким образом, что его запрограммированные движения или вспомогательные функции можно изменить без физических преобразований (2.3) устройства.
2.5 многоцелевой (multipurpose): Допускающий адаптацию к различным приложениям путем физических преобразований (2.3).
2.6 робот (robot): Приводной механизм, программируемый по двум и более осям (4.3), имеющий некоторую степень автономности (2.2), движущийся внутри своей рабочей среды и выполняющий задачи по предназначению.
Примечание 1 - Робот включает систему управления (2.7) и интерфейс системы управления.
Примечание 2 - Подразделение роботов на промышленных роботов (2.9) и обслуживающих роботов (2.10) производится в соответствии с их предназначением.
2.7 система управления (control system): Набор функций логического управления и силовых функций, позволяющих проводить мониторинг, управление механической конструкцией робота (2.6) и осуществлять связь с окружающей средой (оборудованием и пользователями).
2.8 роботизированное устройство (robotic device): Приводной механизм, имеющий характеристики промышленного робота (2.9) или обслуживающего робота (2.10). Может иметь непрограммируемые оси (4.3) или недостаточную степень автономности (2.2).
Пример - Усилительное устройство; устройство с телеуправлением; двухосный промышленный манипулятор (2.1).
2.9 промышленный робот (industrial robot): Автоматически управляемый, перепрограммируемый (2.4), многоцелевой (2.5) манипулятор (2.1), программируемый по трем осям и более (4.3). Он может быть либо зафиксирован в заданном месте, либо иметь возможность передвижения для выполнения промышленных задач по автоматизации.
Примечание 1 - Промышленный робот включает:
- манипулятор, включая исполнительные механизмы (3.1);
- контроллер, включая подвесной пульт обучения (5.8) и интерфейс связи (электронное оборудование и программное обеспечение).
Примечание 2 - Данный объект может иметь дополнительные интегрированные оси.
2.10 обслуживающий робот (service robot): Робот (2.6), выполняющий полезную работу для людей и оборудования, исключая промышленные задачи по автоматизации.
Примечание 1 - Промышленные приложения автоматизации включают (и не только) производство, контроль, упаковку и сборку.
Примечание 2 - В то время как шарнирные роботы (3.15.5), используемые на технологических линиях - это промышленные роботы (2.9), аналогичные шарнирные роботы, доставляющие еду, - это обслуживающие роботы (2.10).
2.11 персональный обслуживающий робот; обслуживающий робот для персонального использования (personal service robot; service robot for personal use): Обслуживающий робот (2.10), используемый для непрофессиональных некоммерческих работ.
Пример - Робот - домашняя прислуга, автоматизированная инвалидная коляска, робот-нога (робот-рука и т.п.), робот для дрессировки домашних животных.
2.12 профессиональный обслуживающий робот; обслуживающий робот для профессионального использования (professional service robot; service robot for professional use): Обслуживающий робот (2.10), используемый для выполнения коммерческих работ. Обычно управляется специально обученным оператором (2.17).
Пример - Робот-уборщик для общественных мест, робот для доставки товаров в офисы и больницы, робот-пожарный, реабилитационный робот и робот-хирург в больницах.
2.13 мобильный робот (mobile robot): Роботы (2.6) с автономным управлением, которые могут самостоятельно передвигаться.
Примечание - Мобильный робот может быть мобильной платформой (3.18) с манипулятором (2.1) или без него.
2.14 робототехническая система (robot system): Система, включающая роботов (2.6), рабочие органы роботов (3.11), а также машины, оборудование, устройства и датчики, поддерживающие роботов во время работы.
2.15 промышленная робототехническая система (industrial robot system): Система, включающая промышленных роботов (2.9), рабочие органы роботов (3.11), машины, оборудование, устройства, внешние вспомогательные оси и датчики, поддерживающие роботов во время работы.
2.16 робототехника (robotics): Наука и практика разработки, производства и применения роботов (2.6).
2.17 оператор (operator): Человек, осуществляющий запуск, мониторинг и остановку работ по предназначению робота (2.6) или робототехнической системы (2.14).
2.18 программист (programmer): Человек, разрабатывающий рабочие программы (5.1.1).
Примечание - Различные способы программирования определены в 5.2.
2.19 реципиент; бенефициар (recipient; beneficiary): Лицо, взаимодействующее с обслуживающим роботом (2.10) с целью получения выгоды.
Примечание - Настоящее определение обусловливает отличие реципиента от оператора (2.17).
Пример - Пациент, получающий уход от медицинского робота.
2.20 инсталляция (installation): Операция, включающая установку робота (2.6) на рабочее место, подключение его к электрической сети, добавление компонентов инфраструктуры при необходимости.
2.21 пусконаладка (commissioning): Процесс настройки и проверки робототехнической системы (2.14) с последующей верификацией функций робота после инсталляции (2.20).
2.22 интеграция (integration): Действие, объединяющее робота (2.6) с другим оборудованием или другой машиной (включая дополнительного робота). При этом образуется станочная система, готовая к результативной деятельности (например, изготовлению деталей).
Примечание - Настоящее определение предназначено только для промышленного робота (2.9).
2.23 промышленный роботизированный модуль (industrial robot cell): Одна или несколько промышленных робототехнических систем (2.15), включая ассоциированные машины и оборудование, а также ассоциированное охраняемое пространство (4.8.5) и соответствующие защитные меры.
2.24 промышленная роботизированная линия (industrial robot line): Несколько промышленных роботизированных модулей (2.23), выполняющих одинаковые или различные функции. Сюда также входит ассоциированное оборудование, размещенное в одинарных или спаренных охраняемых пространствах (4.8.5).
2.25 совместная операция (collaborative operation): Состояние, в котором специально созданные роботы (2.6) работают в непосредственной кооперации с человеком внутри определенного рабочего пространства.
2.26 робот для совместных работ (collaborative robot): Робот (2.6), созданный для непосредственного взаимодействия с человеком.
2.27 кооперация роботов (robot cooperation): Обмен информацией и действиями между несколькими роботами (2.6) с тем, чтобы гарантировать эффективное выполнение ими порученных работ.
2.28 разумный робот; робот с элементами искусственного интеллекта (intelligent robot): Робот (2.6), выполняющий работу путем считывания данных из окружающей среды, взаимодействия с внешними источниками и адаптации своего поведения.
Пример - Промышленный робот (2.9), имеющий датчик изображения, чтобы захватить или положить объект; мобильный робот (2.13) с устройством предотвращения столкновений; шагающий робот (3.16.2), двигающийся по пересеченной местности.
2.29 взаимодействие человек - робот (human-robot interaction; HRI): Обмен информацией и действиями между человеком и роботом (2.6) для выполнения работ с помощью интерфейса пользователя (5.12).
Пример - Обмен с помощью голоса, зрения или на ощупь.
Примечание - Во избежание путаницы рекомендуется не использовать аббревиатуру HRI для интерфейса "человек - робот" при описании интерфейса пользователя.
2.30 апробация (validation): Подтверждение путем проверки и обеспечение объективного свидетельства о том, что заданные требования (к использованию робота по предназначению) выполнены.
Примечание - Адаптировано из ИСО 9000:2005, определение 3.8.5.
2.31 верификация (verification): Подтверждение путем проверки и обеспечение объективного свидетельства, что требования выполнены.
Примечание - Адаптировано из ИСО 9000:2005, определение 3.8.4.
3 Механическая конструкция
3.1 привод; привод робота; привод машины (actuator; robot actuator; machine actuator): Силовой механизм, используемый для осуществления движения робота (2.6).
Пример - Электродвигатель, преобразующий электрическую, гидравлическую или пневматическую энергию в энергию движения робота.
3.2 рука робота; рука; основные оси (robotic arm; arm; primary axes): Взаимосвязанная совокупность звеньев (3.6) и шарниров с силовым приводом манипулятора (2.1), содержащая звенья продольной формы, которые позиционируют запястье (3.3).
3.3 запястье робота; запястье; вторичные оси (robotic wrist; wrist; secondary axes): Взаимосвязанная совокупность звеньев (3.6) и шарниров с силовым приводом манипулятора (2.1), расположенная между рукой (3.2) и рабочим органом (3.11), к которой крепится рабочий орган и которая его позиционирует и ориентирует.
3.4 нога робота; нога (robotic leg; leg): Многозвенный (3.6) механизм, снабженный силовым приводом для поддержания и приведения в движение мобильного робота (2.13) за счет возвратно-поступательных движений и прерывистого контакта с поверхностью перемещения (7.7).
3.5 конфигурация (configuration): Совокупность значений положения всех шарниров, которая полностью определяет форму робота (2.6) в любой момент времени.
3.6 звено (link): Твердое тело, соединяющее соседние шарниры.
3.7 Соединения
3.7.1 призматический шарнир; выдвижной шарнир (prismatic joint; sliding joint): Сочленение двух звеньев (3.6), обеспечивающее линейное перемещение одного звена относительно другого.
3.7.2 вращательный шарнир; новоротный* шарнир (rotary joint; revolute joint): Сочленение двух звеньев (3.6), обеспечивающее вращение одного звена относительно другого вокруг неподвижной оси.
___________________
* Текст документа соответствует оригиналу. - .
3.7.3 цилиндрический шарнир (cylindrical joint): Сочленение двух звеньев (3.6), обеспечивающее поступательное и вращательное движение одного звена относительно другого вокруг оси, связанной с направлением поступательного движения.
3.7.4 сферический шарнир (spherical joint): Сочленение двух звеньев (3.6), обеспечивающее вращение одного звена относительно другого вокруг неподвижной точки по трем степеням свободы (4.4).
3.8 опора (base): Конструкция, к которой крепится первая исходная связка звеньев (3.6) манипулятора (2.1).
3.9 монтажная поверхность опоры (base mounting surface): Соединительная поверхность между рукой (3.2) и поддерживающей конструкцией.
3.10 механический интерфейс (mechanical interface): Монтажная поверхность на конце манипулятора (2.1), к которой крепится рабочий орган робота (3.11).
Примечание - См. ИСО 9409-1 и ИСО 9409-2.
3.11 рабочий орган робота (end effector): Устройство, специально предназначенное для крепления механического интерфейса (3.10), обеспечивающего работу робота (2.6).
Пример - Захватное устройство, гайковерт, сварочный пистолет, пистолет-распылитель.
3.12 соединительная муфта рабочего органа робота (end effector coupling device): Пластина или вал на конце запястья (3.3), а также запорные устройства и дополнительные детали, обеспечивающие надежное крепление рабочего органа робота (3.11) на конце запястья.
3.13 автоматическая система замены рабочего органа робота (automatic end effector exchange system): Соединительная муфта, расположенная между механическим интерфейсом (3.10) и рабочим органом робота (3.11) и обеспечивающая автоматическую замену рабочего органа робота.
Примечание - См. ИСО 11593.
3.14 захватное устройство (gripper): Рабочий орган робота (3.11), предназначенный для захвата и удержания детали.
3.15 Типы механических конструкций роботов
3.15.1 робот, работающий в прямоугольной системе координат; декартов робот (rectangular robot; Cartesian robot): Робот (2.6), руки (3.2) которого имеют три призматических соединения (3.7.1), оси (4.3) которых совпадают с декартовой координатной системой.
Пример - Портальный робот (см. рисунок А.1).
3.15.2 цилиндрический робот (cylindrical robot): Робот (2.6), руки (3.2) которого имеют по крайней мере один вращательный шарнир (3.7.2) и один призматический шарнир (3.7.1), а его оси (4.3) образуют цилиндрическую координатную систему.
Примечание - См. рисунок А.2.
3.15.3 полярный робот; сферический робот (polar robot; spherical robot): Робот (2.6), руки (3.2) которого имеют два вращательных шарнира (3.7.2) и один призматический шарнир (3.7.1). Оси (4.3) образуют полярную координатную систему.
Примечание - См. рисунок А.3.
3.15.4 подвесной робот маятникового типа (pendular robot): Полярный робот (3.15.3), механическая конструкция которого включает универсальную качающуюся подсборку.
Примечание - См. рисунок А.4.
3.15.5 шарнирный робот (articulated robot): Робот (2.6), руки (3.2) которого имеют три вращательных шарнира (3.7.2) и более.
Примечание - См. рисунок А.5.
3.15.6 робот типа SCARA (SCARA robot): Робот (2.6), имеющий два параллельных вращательных шарнира (3.7.2), обеспечивающих податливость (5.3.9) в заданной плоскости.
Примечание - SCARA определяется как "селективно согласующаяся рука для роботизированной сборки".
3.15.7 цапфовый робот (spine robot): Робот (2.6), рука (3.2) которого состоит из двух сферических шарниров (3.7.4) и более.
3.15.8 параллельный робот; робот с параллельными связками (parallel robot; parallel link robot): Робот (2.6), руки (3.2) которого имеют связки (3.6), образующие конструкцию с замкнутым контуром.
Пример - Платформа Стьюарта.
3.16 Типы механических конструкций мобильного робота
3.16.1 колесный робот (wheeled robot): Мобильный робот (2.13), который перемещается на колесах.
Примечание - См. рисунок А.6.
3.16.2 шагающий робот (legged robot): Мобильный робот (2.13), который перемещается на одной или нескольких ногах (3.4).
Примечание - См. рисунок А.7.
3.16.3 двуногий робот (biped robot): Шагающий робот (3.16.2), который перемещается на двух ногах (3.4).
Примечание - См. рисунок А.8.
3.16.4 гусеничный робот; рельсовый робот (crawler robot; tracked robot): Мобильный робот (2.13), который перемещается на гусеницах (по рельсам).
Примечание - См. рисунок А.9.
3.17 антропоморфный робот (humanoid robot): Робот (2.6), имеющий тело, голову и конечности. Смотрит и двигается как человек.
3.18 мобильная платформа (mobile platform): Сборка, включающая все компоненты мобильного робота (2.13), обеспечивающие локомоцию.
Примечание 1 - Мобильная платформа может включать шасси, воспринимающее нагрузку (6.2.1).
Примечание 2 - Чтобы не путать с термином "опора" (3.8), рекомендуется не использовать термин "мобильная опора" для описания мобильной платформы.
3.19 всенаправленный мобильный механизм (omni-directional mobile mechanism): Колесный механизм, мгновенно обеспечивающий движение мобильного робота (2.13) в любом направлении.
3.20 автоматизированный робокар (automated guided vehicle; AGV): Мобильная платформа (3.18), движущаяся по заданной траектории (4.5.4), обозначенной маркерами или внешними командами управления (обычно на заводе).
Примечание - Стандарты на AGV-роботов разработаны техническим комитетом ИСО/ТК 110 "Промышленные грузовики".
4 Геометрия и кинематика
4.1 упреждающая кинематика (forward kinematics): Математическое определение соотношения между координатными системами двух частей механической связи, использующее обобщенные координаты данной связи.
Примечание - Для манипулятора (2.1), это, как правило, соотношение между координатной системой инструмента (4.7.5) и координатной системой опоры (4.7.2).
4.2 обратная кинематика (inverse kinematics): Математическое определение обобщенных координат механической связи, основанное на соотношении координатных систем двух частей настоящей связи.
Примечание - Для манипулятора (2.1), это соотношение между координатной системой инструмента (4.7.5) и координатной системой опоры (4.7.2), используемых для определения обобщенных координат.
4.3 ось (axis): Направление, используемое для задания движения робота (2.6) в линейном или вращательном режиме.
Примечание - Понятие "ось" также используется для описания "механического соединения робота".
4.4 степень свободы (degree of freedom; DOF): Одна из переменных (максимальное число равно 6), необходимых для определения движения тела в пространстве.
Примечание - Чтобы не путать с термином "ось" (4.3), рекомендуется не использовать термин "степень свободы" для описания движения робота.
4.5 расположение (pose): Комбинация положения и ориентации тела в пространстве.
Примечание 1 - Расположение для манипулятора (2.1) обычно относится к положению и ориентации рабочего органа робота (3.11) или его механического интерфейса (3.10).
Примечание 2 - Расположение для мобильного робота (2.13) может включать набор расположений мобильной платформы (3.18) и какого-либо манипулятора (2.1), прикрепленного к мобильной платформе, по отношению к глобальной координатной системе (4.7.1).
4.5.1 заданное расположение; запрограммированное расположение (command pose; programmed pose): Расположение (4.5), заданное программой задач (5.1.1).
4.5.2 достигнутое расположение (attained pose): Расположение (4.5), достигнутое роботом (2.6) в ответ на заданное расположение (4.5.1).
4.5.3 скоординированное расположение (alignment pose): Заданное расположение (4.5), являющееся геометрической ссылкой для робота (2.6).
4.5.4 путь (path): Упорядоченный набор расположений (4.5).
4.6 траектория (trajectory): Путь (4.5.4) с привязкой ко времени.
4.7 Координатные системы
Примечание - См. ИСО 9787.
4.7.1 глобальная координатная система (world coordinate system): Стационарная (земная) координатная система, не зависящая от движения робота (2.6).
4.7.2 координатная система опоры (base coordinate system): Координатная система, связанная с монтажной поверхностью опоры (3.9).
4.7.3 координатная система механического интерфейса (mechanical interface coordinate system): Координатная система, связанная с механическим интерфейсом (3.10).
4.7.4 координатная система соединения (joint coordinate system): Координатная система, связанная с осями (4.3) соединения. Координаты соединения в ней определяются по отношению к предшествующим координатам соединения или к какой-либо другой координатной системе.
4.7.5 координатная система инструмента (tool coordinate system; TCS): Координатная система, связанная с инструментом или рабочим органом робота (3.11), прикрепленным к механическому интерфейсу (3.10).
4.7.6 координатная система мобильной платформы (mobile platform coordinate system): Координатная система, связанная с одним из компонентов мобильной платформы (3.18).
Примечание - Типовая координатная система мобильной платформы для мобильного робота (2.13) дает положительные значения координаты X в упреждающем направлении, положительные значения координаты Z в направлении снизу вверх и положительные значения координаты Y в направлении, получаемом по правилу "правой руки".
4.8 Пространства
4.8.1 максимальное пространство (maximum space): Пространство, ометаемое движущимися деталями робота (2.6), по определению производителя, плюс пространство, ометаемое рабочим органом робота (3.11) и заготовкой.
Примечание - Для мобильных платформ (3.18) данный объем может рассматриваться как полный объем, теоретически ометаемый в результате движения деталей.
4.8.2 ограниченное пространство (restricted space): Часть максимального пространства (4.8.1) в пределах ограничителя хода (5.15), устанавливающего масштабы возможных перемещений.
Примечание - Для мобильных платформ (3.18) данный объем может быть ограничен специальными маркерами на полах и стенах. Пределы могут задаваться программным обеспечением во внутреннем отображении.
4.8.3 операционное пространство (operational space; operating space): Часть ограниченного пространства (4.8.2), фактически используемая при движении робота по командам программы задач (5.1.1).
4.8.4 рабочее пространство (working space): Пространство, ометаемое ссылочной точкой запястья (4.10). Оно определяется также диапазоном вращения и поступательного смещения каждого соединения запястья (3.3).
Примечание - Рабочее пространство меньше, чем пространство, ометаемое всеми движущимися деталями манипулятора (2.1).
4.8.5 охраняемое пространство (safeguarded space): Пространство, определенное зоной охраны.
4.8.6 совместное рабочее пространство (collaborative workspace): Рабочее пространство, находящееся внутри охраняемого пространства (4.8.5), где робот (2.6) и человек могут выполнять работы одновременно в процессе производства.
Примечание - Настоящее определение в данный момент относится только к промышленным роботам (2.9).
4.9 центральная точка инструмента (tool centre point; TCP): Точка, определенная для данного приложения по отношению к механическому интерфейсу координатной системы (4.7.3).
4.10 характеристическая точка запястья; центральная точка запястья; исходная точка запястья (wrist reference point; wrist centre point; wrist origin): Точка пересечения двух внутренних наиболее удаленных от поверхности вторичных осей (3.3) [то есть ближайших к основным осям (3.2)], или, если они не существуют, заданная точка на внутренней наиболее удаленной от поверхности вторичной оси.
4.11 исходная точка мобильной платформы; ссылочная точка мобильной платформы (mobile platform origin; mobile platform reference point): Исходная точка координатной системы мобильной платформы (4.7.6).
4.12 преобразование координат (coordinate transformation): Процесс перевода координат расположения (4.5) из одной координатной системы (4.7) в другую.
4.13 сингулярность (singularity): Ситуация, когда ранг матрицы Якоби становится меньше, чем полный ранг.
Примечание - С точки зрения математики в сингулярной конфигурации (3.5) скорость соединения в пространстве обобщенных координат может стать бесконечной (при оценке декартовой скорости). При фактических операциях движение, определенное в декартовом пространстве и протекающее в окрестности сингулярностей, может давать высокие осевые скорости. Данные высокие скорости могут оказаться неожиданными для оператора (2.17).
5 Программирование и управление
5.1 Программы
5.1.1 программа задач (task program): Набор инструкций по движению и вспомогательным функциям, определяющим особые работы робота (2.6) или робототехнической системы (2.14) по предназначению.
Примечание 1 - Настоящий тип программ обычно генерируется после инсталляции робота. Программы могут быть модифицированы квалифицированным специалистом при определенных условиях.
Примечание 2 - Приложением является общая рабочая область. Работа является особой для приложения.
5.1.2 программа управления (control program): Собственный набор управляющих инструкций, определяющих возможности, действия и реакции робота (2.6) или робототехнической системы (2.14).
Примечание - Настоящий тип программ обычно генерируется перед инсталляцией (2.20). Программы могут модифицироваться только производителем.
5.2 Программирование
5.2.1 программирование задач; программирование (task programming; programming): Процесс создания программы задач (5.1.1).
5.2.2 программирование ручного ввода данных (manual data input programming): Генерация и ввод программы непосредственно в робототехническую систему управления (2.7) с помощью переключателей, штепсельной панели и клавиатуры.
5.2.3 программирование путем обучения (teach programming): Программирование выполняется путем ручной проводки рабочего органа робота (3.11), ручной проводки механического моделирующего устройства, с помощью подвесного пульта обучения (5.8) или путем пошагового перемещения робота (2.6) по требуемым положениям.
5.2.4 автономное программирование (off-line programming): Метод программирования, в соответствии с которым программа задач (5.1.1) определена устройствами, расположенными отдельно от данного робота (2.6), для последующего их введения внутрь робота.
5.2.5 целевое программирование (goal-directed programming): Метод программирования, в соответствии с которым определена выполняемая работа, но путь (4.5.4) ее выполнения роботом (2.6) не задан.
5.3 Управление
5.3.1 позиционное управление; РТР-управление (pose-to-pose control; PTP-control): Способ управления, при котором оператор может задавать только точки позиционирования (4.5.1), через которые должен пройти робот (2.6), без определения траектории (4.5.4) движения между ними.
5.3.2 непрерывное управление путем; СР-управление (continuous path control; СР control): Метод управления, согласно которому пользователь может задать роботу (2.6) путь (4.5.4), проходимый между заданными расположениями (4.5.1).
5.3.3 управление траекторией (trajectory control): Непрерывное управление путем (5.3.2) с заданным профилем скорости.
5.3.4 копирующее управление (master-slave control): Метод управления, согласно которому движение основного устройства (мастера) воспроизводится вторичным (подчиненным) устройством.
Примечание - Копирующее управление обычно используется при телеуправлении (5.10).
5.3.5 сенсорное управление (sensory control): Схема управления, в соответствии с которой движение (сила) робота (2.6) настраивается в соответствии с показаниями экстероцептивного датчика (7.11.2).
5.3.6 адаптивное управление (adaptive control): Схема управления, в соответствии с которой параметры системы управления настраиваются с учетом условий технологического процесса.
5.3.7 управление с обучением (learning control): Схема управления, в соответствии с которой опыт, накопленный на предыдущих циклах (6.22), автоматически используется при изменении параметров и (или) алгоритмов управления.
5.3.8 планирование движения (motion planning): Процесс, с помощью которого программа управления роботом (2.6) определяет, как перемещать соединения механической конструкции между заданными расположениями (4.5.1), запрограммированными пользователем в соответствии с выбранным типом интерполяции.
5.3.9 податливость (compliance): Реакция робота (2.6) или ассоциированного инструмента на действие внешней силы.
Примечание - Если отклик не зависит от показаний датчика обратной связи, то податливость называется пассивной, если зависит - активной.
5.3.10 рабочий режим (operating mode; operational mode): Состояние робототехнической системы управления (2.7).
5.3.10.1 автоматический режим (automatic mode): Рабочий режим (5.3.10), при котором робототехническая система управления (2.7) работает в соответствии с программой задач (5.1.1).
5.3.10.2 ручной режим (manual mode): Рабочий режим (5.3.10), при котором роботом (2.6) можно управлять, например с помощью кнопок или джойстика, когда автоматическое управление исключается.
5.4 серво-управление (servo-control): Процесс, в рамках которого робототехническая система управления (2.7) руководит исполнительными механизмами (3.1) робота (2.6). При этом его достигнутое расположение (4.5.2) должно соответствовать заданному расположению (4.5.1).
5.5 автоматическое функционирование (automatic operation): Состояние, когда робот (2.6) сам выполняет свою программу задач (5.1.1) по предназначению.
5.6 точка останова (stop-point): Заданное расположение (4.5.1) (выученное или запрограммированное), достигнутое осями (4.3) робота (2.6). В данном расположении скорость равна нулю, отклонение отсутствует.
5.7 точка пролета; промежуточная точка (fly-by point; via point): Заданное расположение (4.5.1) (выученное или запрограммированное), достигнутое осями (4.3) робота (2.6) с некоторым отклонением. Величина отклонения зависит от профиля скорости в окрестности настоящего расположения (4.5) и заданных условий его прохождения (скорости, отклонения положения).
5.8 подвесной кнопочный пульт; подвесной пульт обучения (pendant; teach pendant): Ручное устройство, связанное с работой системы управления (2.7), с помощью которого робота (2.6) можно запрограммировать (перемещать).
5.9 джойстик (joystick): Ручное устройство управления, положения (ориентация, приложенные силы) которого измеряются, благодаря чему формируются команды робототехнической системы управления (2.7).
5.10 телеуправление (teleoperation): Управление движением робота (2.6) или роботизированного устройства (2.8) человеком из удаленного места в реальном времени.
Пример - Роботизированные операции бомбометания, сборки космических станций, подводных погружений и хирургии.
5.11 операция воспроизведения (playback operation): Операция робота (2.6), заключающаяся в повторении программы задач (5.1.1), заложенной программированием путем обучения (5.2.3).
5.12 интерфейс пользователя (user interface): Средства обмена информацией и действиями между человеком и роботом (2.6) во время взаимодействия человека и робота (2.29).
Пример - Микрофон, громкоговоритель, графический интерфейс пользователя, джойстик, сенсорные устройства.
5.13 язык робота (robot language): Язык программирования, используемый для описания программы задач (5.1.1).
5.14 одновременные движения (simultaneous motion): Движения двух и более роботов (2.6), находящихся в одно время под управлением одной станции. Данные движения координируются (синхронизируются) путем общей математической корреляции.
Примечание 1 - Примером одной станции управления является подвесной пульт обучения (5.8).
Примечание 2 - Координация может быть достигнута с помощью копирующего управления.
5.15 ограничитель хода (limiting device): Средства, ограничивающие максимальное пространство (4.8.1) путем остановки (торможения) всех движений робота (2.6).
5.16 программа верификации (program verification): Выполнение программы задач (5.1.1) для подтверждения пути (4.5.4) робота и процесса его функционирования.
Примечание - Программа верификации может включать весь путь, отслеживаемый центральной точкой инструмента (4.9) во время выполнения программы задач, или сегмент этого пути. Пакет инструкций может представлять собой одну инструкцию или непрерывную последовательность инструкций. Программа верификации может использоваться в новых приложениях, а также при настройке/редактировании существующих приложений.
5.17 защитный останов (protective stop): Тип прерывания работ для приостановки движения. Он обеспечивает защиту и позволяет возобновить выполнение работ.
5.18 соответствующий заданному уровню безопасности (safety-rated): Объект, характеризующийся наличием установленных защитных функций, обеспечивающих функционирование с заданным уровнем безопасности.
Пример - Уменьшенная скорость, соответствующая заданному уровню безопасности; скорость мониторинга, соответствующая заданному уровню безопасности; выходной параметр, соответствующий заданному уровню безопасности.
5.19 одна точка управления (single point of control): Способ управления роботом (2.6), когда приведение робота в движение возможно только из одного источника. Управляющий сигнал не может быть перехвачен другим источником управления.
5.20 управление на сниженной скорости; медленное управление (reduced speed control; slow speed control): Режим управления движением робота (2.6), когда скорость не превышает 250 мм/с.
Примечание 1 - Уменьшение скорости нужно, чтобы дать возможность персоналу выйти из опасной зоны, либо остановить робота.
Примечание 2 - Настоящее определение относится только к промышленным роботам (2.9).
6 Функционирование
6.1 нормальные рабочие условия (normal operating conditions): Диапазон значений параметров окружающей среды и других параметров, оказывающих влияние на функционирование робота (скачки напряжения, электромагнитные поля), внутри которого функционирование робота (2.6) считается правильным.
Примечание - Параметрами окружающей среды могут быть температура и влажность.
6.2 Нагрузки
6.2.1 нагрузка (load): Сила и (или) крутящий момент механического интерфейса (3.10) или мобильной платформы (3.18). Прикладывается по различным направлениям движения, обеспечивает заданные скорости и ускорения.
Примечание - Нагрузка является функцией массы, момента инерции, статических и динамических сил, поддерживаемых роботом (2.6).
6.2.2 номинальная нагрузка (rated load): Максимальная нагрузка (6.2.1), которую можно приложить к механическому интерфейсу (3.10) или к мобильной платформе (3.18) при нормальных рабочих условиях (6.1) без снижения параметров функционирования.
Примечание - Номинальная нагрузка при необходимости учитывает инерционные свойства рабочего органа робота (3.11), приспособлений и заготовок.
6.2.3 предельная нагрузка (limiting load): Максимальная нагрузка (6.2.1), указанная производителем. Она может быть приложена к механическому интерфейсу (3.10) или мобильной платформе (3.18) без повреждения или отказа механизма робота (2.6) в ограниченных рабочих условиях.
6.2.4 дополнительная нагрузка; дополнительная масса (additional load; additional mass): Нагрузка (6.2.1), которую выдерживает робот (2.6) в дополнение к номинальной нагрузке (6.2.2). Она еще не приложена к механическому интерфейсу (3.10), но приложена где-либо на манипуляторе (2.1), как правило, к руке (3.2).
6.2.5 максимальная сила; максимальная тяга (maximum force; maximum thrust): Сила (тяга) (исключая силу инерции), которую можно приложить непрерывно к механическому интерфейсу (3.10) или к мобильной платформе (3.18) без причинения постоянного ущерба механизму робота (2.6).
6.2.6 максимальный момент; максимальный крутящий момент (maximum moment; maximum torque): Момент (крутящий момент) (исключая момент сил инерции), который может быть приложен непрерывно к механическому интерфейсу (3.10) или мобильной платформе (3.18) без причинения постоянного ущерба механизму робота (2.6).
6.3 Скорость
6.3.1 скорость индивидуального соединения; скорость индивидуальной оси (individual joint velocity; individual axis velocity): Скорость заданной точки, обусловленная движением одного индивидуального соединения.
6.3.2 скорость пути (path velocity): Изменение положения вдоль пути (4.5.4) за единицу времени.
Примечание - См. расположение (4.5).
6.4 Ускорение
6.4.1 ускорение индивидуального соединения; ускорение индивидуальной оси (individual joint acceleration; individual axis acceleration): Ускорение заданной точки, обусловленное движением одного индивидуального соединения.
6.4.2 ускорение пути (path acceleration): Изменение скорости вдоль пути (4.5.4) за единицу времени.
6.5 точность расположения; точность однонаправленного расположения (pose accuracy; unidirectional pose accuracy): Разность между заданным расположением (4.5.1) и средним значением для совокупности достигнутых расположений (4.5.2) при заданном направлении.
6.6 повторяемость расположений; повторяемость однонаправленных расположений (pose repeatability; unidirectional pose repeatability): Соотношение достигнутых расположений (4.5.2) с одним заданным расположением (4.5.1). Достигаемые расположения реализуются в одном направлении.
6.7 изменение точности мультинаправленных расположений (multidirectional pose accuracy variation): Максимальное расстояние между средними значениями для совокупности достигнутых расположений (4.5.2), полученными при одном заданном расположении (4.5.1) по трем перпендикулярным направлениям.
6.8 точность определения расстояния (distance accuracy): Разность между заданным расстоянием и средним значением для совокупности достигнутых расстояний.
6.9 повторяемость расстояния (distance repeatability): Соотношение заданного расстояния и совокупности достигнутых расстояний, измеренных повторно в одном направлении.
6.10 время стабилизации расположения (pose stabilization time): Время, прошедшее с момента, когда робот (2.6) выдает сигнал о нахождении в требуемом положении, до момента, когда затухающие колебательные движения (или просто затухающее движение) механического интерфейса (3.10) или мобильной платформы (3.18) оказываются внутри заданного допуска.
6.11 перерегулирование расположения (pose overshoot): Максимальное расстояние между (заданным) путем (4.5.4) подхода и достигнутым расположением (4.5.2), имеющее место после выдачи роботом (2.6) сигнала о нахождении в заданном расположении.
6.12 точность ухода от расположения (drift of pose accuracy): Изменение точности расположения (6.5) с течением времени.
6.13 уход повторяемости расположения (drift of pose repeatability): Изменение повторяемости расположения (6.6) с течением времени.
6.14 точность пути (path accuracy): Разность между заданным путем (4.5.4) и средним для совокупности достигнутых путей.
6.15 повторяемость пути (path repeatability): Соотношение между несколькими достигнутыми путями (4.5.4) и одним заданным путем.
6.16 точность скорости пути (path velocity accuracy): Разность между заданной скоростью пути (6.3.2) и средним значением для совокупности скоростей пути, достигнутых при движении поперек пути.
6.17 повторяемость скорости пути (path velocity repeatability): Соотношение скоростей, достигнутых для заданной скорости пути (6.3.2).
6.18 флуктуации скорости пути (path velocity fluctuation): Разность между минимальной и максимальной скоростями в движении поперек пути (4.5.4), если движение вдоль пути происходит с заданной скоростью.
6.19 минимальное время восстановления расположения (minimum posing time): Минимальное время, протекшее между моментом ухода и моментом возвращения в стационарное состояние механического интерфейса (3.10) или мобильной платформы (3.18) при сходе с заданной траектории (включая время стабилизации).
6.20 статическая податливость (static compliance): Максимальное смещение механического интерфейса (3.10), приходящееся на единицу нагрузки (6.2.1), приложенной к механическому интерфейсу.
6.21 разрешение (resolution): Наименьшее смещение, которое может быть достигнуто по каждой оси (4.3) или в соединении робота (2.6).
6.22 цикл (cycle): Одноразовое выполнение программы задач (5.1.1).
Примечание - Некоторые программы задач могут быть не цикличными.
6.23 время цикла (cycle time): Время, необходимое для выполнения цикла (6.22).
6.24 стандартный цикл (standard cycle): Последовательность движений робота (2.6) при выполнении типовой работы (рассматриваемой как ссылка) в заданных условиях.
7 Считывание данных и навигация
7.1 карта окружающей среды; модель окружающей среды (environment map; environment model): Карта или модель, описывающая окружающую среду и ее основные характеристики.
Пример - Карта с координатной сеткой, геометрическая карта, топологическая карта, семантическая карта.
7.2 локализация (localization): Распознавание расположения (4.5) мобильного робота (2.13) или его идентификация на карте окружающей среды (7.1).
7.3 ориентир (landmark): Искусственный или естественный объект, различимый на карте окружающей среды (7.1), используемый для локализации (7.2) мобильного робота (2.13).
7.4 препятствие (obstacle): Статический или движущийся объект (на земле, на стене, на потолке), препятствующий заданному движению.
Примечание - Наземные препятствия включают ступеньки, ямы, неровную местность и т.д.
7.5 картографирование; построение карты; разработка карты (mapping; map building; map generation): Разработка карты окружающей среды (7.1) для описания окружающей среды с ее геометрическими и различимыми особенностями, ориентирами (7.3) и препятствиями (7.4).
7.6 навигация (navigation): Принятие решения и управление направлением движения на основе локализации (7.2) объекта и использования карты окружающей среды (7.1).
Примечание - Навигация может включать планирование пути (4.5.4) для перемещения из одного расположения в другое и полное покрытие области.
7.7 поверхность хода (travel surface): Местность, по которой перемещается мобильный робот (2.13).
7.8 счисление пути (dead reckoning): Метод получения расположения (4.5) мобильного робота (2.13), используя только внутренние измерения, выполненные из известного исходного расположения (4.5).
7.9 сочетание датчиков (sensor fusion): Процесс получения уточненной информации путем объединения информации, полученной с нескольких датчиков.
7.10 планирование задач (task planning): Процесс решения общей проблемы путем разработки конкретной процедуры выполнения задач, включающей составляющие работы и отдельные движения.
Примечание - Планирование задач может включать автономное планирование и пользовательское планирование.
7.11 датчик робота (robot sensor): Преобразователь, используемый для получения внутренней и внешней информации для управления роботом (2.6).
7.11.1 проприоцептивный датчик; датчик внутреннего состояния (proprioceptive sensor; internal state sensor): Датчик робота (7.11), измеряющий внутреннее состояние робота (2.6).
Пример - Кодирующее устройство; потенциометр; тахометр; акселерометр, гироскоп.
7.11.2 экстеросептивный датчик; датчик внешнего состояния (exteroceptive sensor; external state sensor): Датчик робота (7.11), измеряющий состояние окружающей среды или взаимодействие робота (2.6) с окружающей средой.
Пример - GPS; датчик изображения; датчик расстояния; датчик силы; тактильный датчик; акустический датчик.
Приложение А
(справочное)
Примеры типов механических конструкций
|

Рисунок А.1 - Декартов робот (робот, работающий в прямоугольных координатах): портальный робот
|

Рисунок А.2 - Цилиндрический робот
|

Рисунок А.3 - Полярный (сферический) робот
|
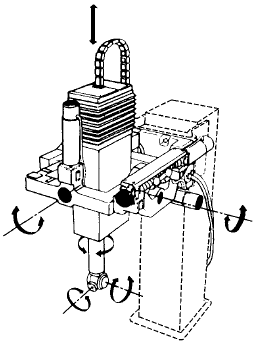
Рисунок А.4 - Подвесной робот маятникового типа
|

Рисунок А.5 - Шарнирный робот
|

Рисунок А.6 - Колесный робот
|

Рисунок А.7 - Шагающий робот
|

Рисунок А.8 - Двуногий робот
|

Рисунок А.9 - Рельсовый (гусеничный) робот
Библиография
[1] | ИСО 9000:2005 | Системы менеджмента качества. Основные положения и словарь |
(ISO 9000:2005) | (Quality management systems - Fundamentals and vocabulary) | |
[2] | ИСО 9283:1998 | Роботы манипуляционные промышленные. Критерии качества работы и соответствующие методы испытания |
(ISO 9283:1998) | (Manipulating industrial robots - Performance criteria and related test methods) | |
[3] | ИСО 9409-1:2004 | Роботы промышленные манипуляционные. Механические интерфейсы. Часть 1. Пластины |
(ISO 9409-1:2004) | (Manipulating industrial robots - Mechanical interfaces - Part 1: Plates) | |
[4] | ИСО 9409-2:2002 | Роботы промышленные манипуляционные. Механические интерфейсы. Часть 2. Валы |
(ISO 9409-2:2002) | (Manipulating industrial robots - Mechanical interfaces - Part 2: Shafts) | |
[5] | ИСО 9787:2013 | Роботы и роботизированные устройства. Системы координат и условных обозначений перемещений |
(ISO 9787:2013) | (Robots and robotic devices - Coordinate systems and motion nomenclatures) | |
[6] | ИСО 9946:1999 | Роботы промышленные манипуляционные. Представление характеристик |
(ISO 9946:1999) | (Manipulating industrial robots - Presentation of characteristics) | |
[7] | ИСО 10218-1:2011 | Роботы манипуляционные промышленные. Требования к технике безопасности. Часть 1 . Роботы |
(ISO 10218-1:2011) | (Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots) | |
[8] | ИСО 10218-2:2011 | Роботы манипуляционные промышленные. Требования к технике безопасности. Часть 1. Системы роботов и их интеграция |
(ISO 10218-2:2011) | (Robots and robotic devices - Safety requirements for industrial robots - Part 2: Robot systems and integration) | |
[9] | ИСО 11593:1996 | Роботы манипуляционные промышленные. Системы автоматической смены рабочих органов. Словарь и представление характеристик |
(ISO 11593:1996) | (Manipulating industrial robots - Automatic end effector exchange systems - Vocabulary and presentation of characteristics) | |
[10] | ИСО 14539:2000 | Роботы манипуляционные промышленные. Манипулирование объектом с помощью захватных устройств типа зажимов. Словарь и представление характеристик |
(ISO 14539:2000) | (Manipulating industrial robots. Object handling with grasp-type grippers. Vocabulary and presentation of characteristics) | |
[11] | ИСО/ТР 13309:1995 | Роботы манипуляционные промышленные. Информативное руководство по испытательному оборудованию и метрологическим методам, применяемым для оценки рабочих характеристик роботов в соответствии со стандартом ИСО 9283 |
(ISO/TR 13309:1995) | (Manipulating industrial robots - Informative guide on test equipment and metrology methods of operation for robot performance evaluation in accordance with ISO 9283) |
УДК 001.4:007.52:6501/.56:006.354 | ОКС 01.040.25 |
Ключевые слова: термины и определения, роботы и роботизированные устройства, робототехника, основные понятия | |
Электронный текст документа
и сверен по:
, 2019
