ГОСТ Р 60.6.3.14-2019/ИСО 18646-1:2016
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РАБОЧИЕ ХАРАКТЕРИСТИКИ И СООТВЕТСТВУЮЩИЕ МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ
Часть 1
Передвижение колесных роботов
Robots and robotic devices. Performance criteria and related test methods for service mobile robots. Part 1. Locomotion for wheeled robots
ОКС 25.040.30
ОКПД2 28.99.39.190
Дата введения 2020-03-25
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 ноября 2019 г. N 1218-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 18646-1:2016* "Робототехника. Рабочие характеристики и соответствующие методы испытаний сервисных роботов. Часть 1. Передвижение колесных роботов" (ISO 18646-1:2016 "Robotics - Performance criteria and related test methods for service robots - Part 1: Locomotion for wheeled robots", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисных мобильных роботов.
1 Область применения
Настоящий стандарт устанавливает методы для определения и оценки рабочих характеристик передвижения колесных роботов в закрытых помещениях.
2 Нормативные ссылки
В настоящем стандарте нормативные ссылки отсутствуют.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями. ИСО и МЭК поддерживают терминологические базы данных для использования в документах по стандартизации по следующим адресам:
- платформа ИСО для онлайн-просмотра доступна по адресу http://www.iso.org/obp;
- Электропедия МЭК доступна по адресу http://www.electropedia.org.
3.1 робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и перемещающийся во внешней среде с целью выполнения задач по назначению.
Примечание 1 - В состав робота входит система управления и интерфейс системы управления.
Примечание 2 - Классификация роботов на промышленные роботы или сервисные роботы (3.2) осуществляется в соответствии с их назначением.
[ИСО 8373:2012, статья 2.6, модифицировано]
3.2 сервисный робот (service robot): Робот (3.1), который выполняет задания, полезные для человека или оборудования, за исключением применений в целях промышленной автоматизации.
Примечание 1 - К применениям в целях промышленной автоматизации относятся, но не ограничиваются ими, производство, контроль, упаковка и сборка.
Примечание 2 - Если шарнирные роботы, используемые на производственных линиях, относятся к промышленным роботам, то похожие шарнирные роботы, используемые для подачи еды, относятся к сервисным роботам.
[ИСО 8373:2012, статья 2.10]
3.3 мобильный робот (mobile robot): Робот (3.1), способный передвигаться под своим собственным управлением.
Примечание - Мобильный робот может быть мобильной платформой (3.5) с манипуляторами или без них.
[ИСО 8373:2012, статья 2.13]
3.4 колесный робот (wheeled robot): Мобильный робот (3.3), перемещающийся с помощью колес.
[ИСО 8373:2012, статья 3.16.1, модифицировано]
3.5 мобильная платформа (mobile platform): Совокупность всех компонентов мобильного робота (3.3), обеспечивающих его передвижение.
Примечание 1 - Мобильная платформа может включать шасси, которое может быть использовано для поддержки нагрузки (3.7).
Примечание 2 - Из-за возможной путаницы с термином "основание" не рекомендуется использовать термин "мобильное основание" для обозначения мобильной платформы.
[ИСО 8373:2012, статья 3.18]
3.6 поверхность перемещения (travel surface): Поверхность, по которой перемещается мобильный робот (3.3).
[ИСО 8373:2012, статья 7.7]
3.7 нагрузка (load): Силы и/или моменты, воздействующие на механический интерфейс или мобильную платформу (3.5), которые могут быть приложены по разным направлениям движения при заданных значениях скорости и ускорения.
Примечание - Нагрузка является функцией массы, момента инерции, а также статических и динамических сил, воздействующих на робота (3.1).
[ИСО 8373:2012, статья 6.2.1]
3.8 номинальная нагрузка (rated load): Максимальная нагрузка (3.7), которая может быть приложена к механическому интерфейсу или мобильной платформе (3.5) при нормальных условиях эксплуатации (3.9) без ухудшения технических характеристик.
Примечание - Номинальная нагрузка, где это применимо, включает инерционное влияние рабочего органа, вспомогательного оборудования и перемещаемой детали.
[ИСО 8373:2012, статья 6.2.2]
3.9 нормальные условия эксплуатации (normal operating conditions): Диапазон условий внешней среды и других параметров, которые могут влиять на технические характеристики робота (3.1) (например, нестабильность источника электропитания, электромагнитные поля), в рамках которого поддерживаются технические характеристики робота, указанные изготовителем.
Примечание - К условиям внешней среды относятся температура и влажность.
[ИСО 8373:2012, статья 6.1]
3.10 тормозной путь (stopping distance): Максимальное расстояние, на которое переместилось начало координат мобильной платформы (3.5) за промежуток времени между инициацией остановки и полной остановкой мобильной платформы.
3.11 номинальная скорость (rated speed): Максимальная скорость мобильной платформы (3.5), движущейся с номинальной нагрузкой (3.8) при нормальных условиях эксплуатации (3.9).
3.12 поворот [turning (turn)]: Движение мобильной платформы (3.5), вызывающее изменение ориентации системы координат мобильной платформы.
Примечание - Поворот обычно сопровождается изменением направления движения мобильной платформы.
3.13 поворот вращением (вращение) [spin turn (spinning)]: Вращение на месте или вращение вокруг начала координат мобильной платформы (3.5) без поступательного перемещения.
3.14 ширина поворота (turning width): Минимальная ширина коридора, в пределах которого мобильная платформа (3.5) может выполнить конкретный вид поворота (3.12).
3.15 ширина разворота (reverse turning width): Ширина поворота (3.14) мобильной платформы (3.5) на 180°.
3.16 ширина U-образного разворота (ширина U-образного поворота) [U-turn width (U-shaped reverse turning width)]: Ширина разворота (3.15) мобильной платформы (3.5) по U-образной траектории.
Примечание - См. рисунок A.1.
3.17 ширина разворота в три приема (ширина поворота в три приема) [three-point-turn width (three-point reverse turning width)]: Ширина разворота (3.15) мобильной платформы (3.5) с использованием одного начального перемещения вперед, одного перемещения назад и одного завершающего перемещения вперед.
Примечание - См. рисунок A.2.
3.18 ширина L-образного поворота (ширина поворота на прямой угол) [L-turn width (right angle turning width)]: Ширина поворота (3.14) мобильной платформы (3.5) на угол 90° для прохода по L-образному коридору.
Примечание - См. рисунок A.3.
4 Условия проведения испытаний
4.1 Общие положения
Робот должен быть полностью собран, достаточно заряжен и работоспособен. Все тесты самодиагностики должны быть успешно выполнены. Следует также обеспечить безопасную работу робота на протяжении всех испытаний.
Испытаниям должна предшествовать подготовка к эксплуатации, установленная заводом-изготовителем.
Все условия, определенные в разделе 4, должны быть выполнены для проведения испытаний, описанных в настоящем стандарте, если иное не указано в конкретных пунктах.
Каждое испытание, определенное в настоящем стандарте, может предусматривать разные схемы проведения испытания, которые определяют разный порядок проведения испытания. Для каждой схемы проведения испытания может потребоваться проведение нескольких попыток, если это определено в порядке проведения испытания.
4.2 Условия окружающей среды
Во время всех испытаний должны поддерживаться следующие условия окружающей среды:
- температура окружающей среды - от 10°C до 30°C;
- относительная влажность - от 0% до 80%.
Если условия окружающей среды, указанные заводом-изготовителем, не соответствуют данным условиям, то это должно быть указано в протоколе испытаний.
4.3 Состояние поверхности перемещения
Должна быть использована твердая и ровная поверхность с коэффициентом трения в диапазоне от 0,75 до 1,0 (измеренным согласно ИСО 7176-13).
4.4 Условия эксплуатации
Все рабочие характеристики следует измерять при нормальных условиях эксплуатации. Если характеристики измеряют при других условиях, то это должно быть указано в протоколе испытаний.
Во всех испытаниях робота необходимо испытывать при движении на номинальной скорости и под воздействием номинальной нагрузки, если не указано иное.
5 Номинальная скорость
5.1 Цель
Целью данного испытания является определение того, как быстро робот может доехать до места назначения. Номинальная скорость является показателем того, насколько быстро робот может обычно выполнять задания, связанные с перемещением. При испытании, определенном в 5.2-5.4, номинальная скорость должна быть определена на основе серии измерений при перемещении по горизонтальной поверхности.
5.2 Испытательный стенд
Стенд для данного испытания показан на рисунке 1. Испытательный стенд для измерения скорости должен иметь длину не менее 1 м и достаточную ширину. С каждой стороны испытательного стенда должно быть предусмотрено достаточное пространство для участков ускорения и торможения. Датчики должны быть расположены на каждом конце испытательного стенда измерения скорости, чтобы измерять время старта и финиша колесного робота.
|
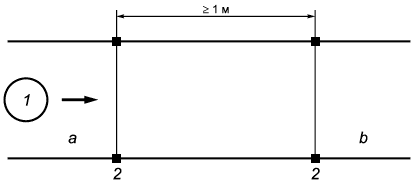
1 - мобильный робот; 2 - датчик; a - участок ускорения, b - участок торможения
Рисунок 1 - Испытательный стенд для измерения номинальной скорости
5.3 Порядок проведения испытания
Для данного испытания существует одна схема проведения испытания. При выполнении каждой попытки следует соблюдать следующий порядок проведения:
a) колесного робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение;
b) робот начинает движение из исходного положения и разгоняется так, чтобы достичь конечной фактической скорости до линии старта;
c) скорость робота определяют с помощью измерительной системы во время движения робота по прямой линии через испытательный стенд измерения скорости;
d) после того как робот проедет финишную линию, он тормозит до полной остановки.
Попытку считают неудачной, если робот не доезжает до финишной линии испытательного стенда или отклоняется от заданного направления движения более чем на 10% длины испытательного стенда измерения скорости. За номинальную скорость, в метрах в секунду, принимают наименьшее значение скорости, измеренной в ходе трех последовательных успешных попыток.
5.4 Результат испытания
Номинальная скорость наряду с конкретными условиями испытаний, включая условия трения, должна быть указана в протоколе испытаний.
6 Параметры торможения
6.1 Цель
Целью данного испытания является определение тормозного пути и времени остановки, которые указывают на способность робота надежно передвигаться во внешней среде. Высокие значения параметров торможения в общем случае способствуют повышению маневренности робота, поскольку обеспечивают быстрое прекращение движения и прохождение поворотов.
При испытании, определенном в 6.2-6.4, тормозной путь и время остановки должны быть определены на основе серии измерений при перемещении по горизонтальной поверхности.
6.2 Испытательный стенд
Для проведения испытания необходим достаточно большой участок с горизонтальной поверхностью перемещения.
Длина испытательного стенда должна быть достаточной для достижения роботом номинальной скорости и безопасной остановки. Испытательный стенд должен быть оборудован средствами для фиксации движения робота. Данные средства должны иметь возможность измерять положение робота с точностью до 2% от значения типичного тормозного пути. Например, можно использовать следующие средства:
- задняя стена, на фоне которой происходит движение робота, может быть окрашена широкими полосами, перпендикулярными к направлению перемещения через каждые 100 мм и узкими полосами через каждые 10 мм;
- испытание может быть записано на видеокамеру, предпочтительно цифрового типа, расположенную как можно дальше для того, чтобы уменьшить позиционные ошибки при измерении параметров торможения;
- допускается использовать более сложное позиционирующее устройство, например трехмерную систему слежения за движением.
6.3 Порядок проведения испытания
Для данного испытания существует одна схема проведения испытания. При выполнении каждой попытки следует соблюдать следующий порядок проведения:
a) колесного робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение;
b) робот начинает движение из исходного положения по прямой линии и разгоняется до достижения номинальной скорости;
c) подается команда остановки либо вручную (например, кнопкой аварийной остановки), либо автоматически (например, с помощью системы обнаружения препятствия), как определено изготовителем. Категория контролируемой остановки 1 или 2, согласно МЭК 60204-1, должна быть использована для того, чтобы гарантировать устойчивую остановку робота.
Примечание - Подачу стоп-сигнала измеряют с помощью измерительного прибора. Например, нажатие кнопки аварийной остановки может быть зафиксировано видеокамерой, либо электрический выходной сигнал может быть использован для синхронизации с устройством слежения за движением;
d) тормозной путь и время остановки определяют с помощью измерения пройденного расстояния и времени, прошедшего между подачей команды остановки и полной остановкой робота. Полная остановка означает полное прекращение движения всего корпуса мобильного робота. Для мобильных платформ, требующих управления устойчивостью (например, для роботов типа обратного маятника), движение, необходимое для управления устойчивостью, разрешается после завершения полной остановки.
За значения тормозного пути и времени остановки принимают их максимальные значения, измеренные в ходе первых трех попыток.
6.4 Результат испытания
Тормозной путь и время остановки наряду с конкретными условиями испытаний, включая номинальную скорость, погрешность измерительного прибора, категорию остановки и условия трения, должны быть указаны в протоколе испытаний.
7 Максимальный угол наклона
7.1 Цель
Целью данного испытания является определение максимального угла наклона поверхности перемещения, при котором мобильный робот может двигаться в заданных направлениях.
7.2 Испытательный стенд
Испытание должно проводиться на склоне, установленном под определенным углом с точностью ±0,5°.
7.3 Порядок проведения испытания
Для данного испытания необходимо реализовать пять схем проведения испытания, представленных в таблице 1.
Таблица 1 - Схемы проведения испытания
Схема проведения испытания | Маршрут робота относительно склона | Направление движения робота |
1 | Вверх | Вперед |
2 | Вверх | Назад |
3 | Вниз | Вперед |
4 | Вниз | Назад |
5 | Вбок (перпендикулярно) | Вперед |
При выполнении каждой попытки следует соблюдать следующий порядок проведения:
a) устанавливают заданный угол наклона поверхности перемещения;
b) робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение на склоне;
c) робот должен передвигаться по прямой линии на расстояние не менее 1 м со скоростью, заявленной изготовителем;
d) робот должен остановиться на склоне после достижения заданной позиции.
Попытку считают неудачной, если робот не доезжает до финишной линии испытательного стенда или отклоняется от заданного направления движения более чем на 20% длины испытательного стенда измерения скорости, определенной в 5.2. За угол наклона, преодоленный в результате испытания, должен быть принят максимальный угол наклона для данной схемы проведения испытания, успешно преодоленный в трех последовательных попытках.
7.4 Результат испытания
Максимальные углы наклона наряду с конкретными условиями испытаний, включая условия трения и заданные скорости, должны быть указаны в протоколе испытаний с использованием таблицы 2.
Таблица 2 - Максимальные углы наклона
Направление движения | Вверх/вперед | Вверх/назад | Вниз/вперед | Вниз/назад | Вбок/вперед |
Максимальный угол наклона |
8 Максимальная скорость на склоне
8.1 Цель
Целью данного испытания является определение максимальной скорости движения мобильного робота на склонах с фиксированным набором углов наклона в заданных направлениях.
8.2 Испытательный стенд
Испытание должно проводиться на склонах с углами наклона 3°, 6° и 10°, при необходимости. Углы должны быть установлены с точностью ±0,5°.
Примечание - Углы наклона 3°, 6° и 10° характерны для испытаний кресла-коляски по ИСО 7176-2.
Испытательный стенд должен быть оснащен измерительной системой, способной измерять скорость робота. Испытательный стенд измерения скорости должен иметь длину не менее 1 м и достаточную ширину. На обоих концах испытательного стенда должно быть обеспечено достаточное пространство для участков ускорения и торможения.
8.3 Порядок проведения испытания
Для данного испытания необходимо реализовать пять схем проведения испытания, представленных в таблице 3, каждая из которых должна быть отработана на трех углах наклона 3°, 6° и 10°. Поэтому в ходе испытания должно быть отработано максимально 15 схем проведения испытания.
Таблица 3 - Схемы проведения испытания
Схема проведения испытания | Маршрут робота относительно уклона | Направление движения робота |
1 | Вверх | Вперед |
2 | Вверх | Назад |
3 | Вниз | Вперед |
4 | Вниз | Назад |
5 | Вбок (перпендикулярно) | Вперед |
При выполнении каждой попытки следует соблюдать следующий порядок проведения:
a) робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение на уклоне 3°, 6° или 10°;
b) робот движется по прямой линии, при этом он ускоряется, движется с максимальной скоростью и тормозит;
c) скорость робота определяют с помощью измерительной системы, когда он движется на максимальной скорости;
d) робот должен остановиться на склоне после достижения заданной позиции.
Попытку считают неудачной, если робот не достигает финишной черты испытательного стенда или отклоняется от заданного направления движения более чем на 20% длины испытательного стенда измерения скорости, определенной в 5.2. За значение максимальной скорости при данном угле наклона поверхности для каждой схемы проведения испытания должно быть выбрано минимальное значение скорости из трех последовательных успешных попыток.
8.4 Результат испытания
Для каждой схемы проведения испытания максимальные скорости на каждом склоне наряду с конкретными условиями испытаний, включая условия трения, должны быть указаны в протоколе испытаний с использованием таблицы 4.
Таблица 4 - Максимальная скорость
Направление движения | Вверх/вперед | Вверх/назад | Вниз/вперед | Вниз/назад | Вбок/вперед |
Максимальная скорость при угле наклона 3° | |||||
Максимальная скорость при угле наклона 6° | |||||
Максимальная скорость при угле наклона 10° |
9 Движение через порог
9.1 Цель
Целью данного испытания является определение максимальной высоты порога, через который робот может переехать. Чтобы переехать через широкий порог, робот должен иметь возможность взобраться на порог и спуститься с него без каких-либо повреждений. Для коротких порогов робот также должен иметь достаточный дорожный просвет, чтобы корпус мобильного робота (кроме колес) не касался порога при переезде через него.
9.2 Испытательная установка
На испытательном стенде должно быть предусмотрено два порога:
- короткий порог;
- длинный порог.
Эскиз порога показан на рисунке 2. Высота порога H должна быть установлена на заданное значение. Ширина порога W должна быть более ширины робота. Длина порога L должна быть определена с учетом габаритных размеров робота и среды его применения. Типичными длинами являются 0,1 м для короткого порога и не менее 1 м для длинного порога для того, чтобы все колеса робота могли расположиться на верхней поверхности длинного порога. Передний край порога должен быть скругленным с радиусом не более 3 мм.
|
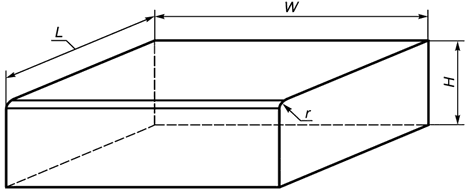
H - высота порога; L - длина порога; - радиус порога; W - ширина порога
Рисунок 2 - Размеры порога
9.3 Порядок проведения испытания
Данное испытание предусматривает две схемы проведения испытания:
- короткий порог;
- длинный порог.
Для обеих схем проведения испытания каждая попытка должна выполняться в соответствии со следующим порядком проведения:
a) высоту порога устанавливают на заданное значение;
b) колесного робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение так, чтобы робот мог достичь заданной скорости до подхода к порогу;
c) робот движется по прямой линии перпендикулярно к передней кромке порога с заданной скоростью, если иное не установлено его изготовителем;
d) робот должен полностью переехать через порог.
Попытку считают неудачной, если робот не смог полностью переехать через порог или если корпус мобильной платформы, за исключением колес, коснулся поверхности перемещения при выполнении попытки. За значение высоты порога, преодолеваемого роботом, должна быть принята максимальная высота порога при данной схеме проведения испытания, преодоленного роботом в результате трех последовательных успешных попыток.
9.4 Результат испытания
В протоколе испытаний должны быть указаны максимальная высота порога для каждой схемы проведения испытания, а также конкретные условия испытаний, включая размеры порога, угол подхода к передней кромке, условия трения и заданные скорости.
10 Ширина поворота
10.1 Цель
Целью данного испытания является определение ширины поворота для конкретного типа поворота мобильного робота.
Ширина поворота определяется не только механическими характеристиками (например, углом поворота управляемых колес), но также способностью системы управления выполнить поворот.
В данном испытании используют три типа поворотов:
- U-образный разворот;
- разворот в три приема;
- L-образный поворот.
U-образный разворот и разворот в три приема не применимы к мобильным роботам, способным выполнять поворот вращением. Вместо этого для таких роботов должна быть определена ширина разворота при повороте вращением.
10.2 Испытательный стенд
Границами коридора для каждого типа поворота должны быть стенки высотой, превышающей высоту робота. У мобильного робота должна быть активирована функция предотвращения столкновений.
10.3 Порядок проведения испытания
Данное испытание предусматривает три схемы проведения испытания (U-образный разворот, разворот в три приема и L-образный поворот), как показано на рисунках A.1-A.3. Каждая попытка должна выполняться в соответствии со следующим порядком проведения:
a) расстояние между стенками устанавливают на заданное значение;
b) колесного робота, на котором размещена номинальная нагрузка, устанавливают в исходное положение;
c) робот начинает движение из своего исходного положения до тех пор, пока не достигнет скорости, заданной изготовителем для конкретного типа поворота;
d) робот начинает поворот;
e) после того как робот выполнил поворот, он замедляется до полной остановки. Поворот считается выполненным, если робот достигает заданной ориентации.
Попытку считают неудачной, если при повороте робот коснется стенки испытательного стенда или не достигнет заданной ориентации. Расстояние между стенками, установленное в данной процедуре испытания, должно быть принято за ширину поворота для данной схемы проведения испытания после трех последовательных успешных попыток. За время поворота должно быть принято максимальное значение из первых трех последовательных успешных попыток.
10.4 Результат испытания
Ширина поворота для каждого типа поворота, а также конкретные условия испытаний, включая условия трения, заданные скорости и время поворота, должны быть указаны в протоколе испытаний.
Приложение A
(справочное)
Примеры схем проведения испытаний для определения ширины поворота
Три схемы проведения испытания (U-образный разворот, разворот в три приема и L-образный поворот) для определения ширины поворота показаны на рисунках A.1-A.3, где W обозначает расстояние между материальными стенками.
|
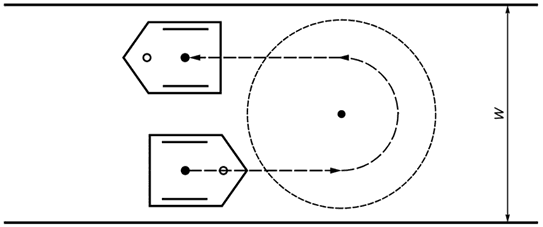
Рисунок А.1 - Ширина U-образного разворота мобильного робота
|
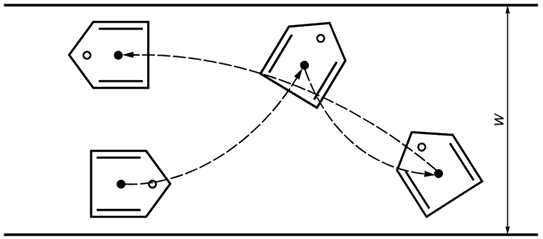
Рисунок А.2 - Ширина разворота мобильного робота в три приема
|
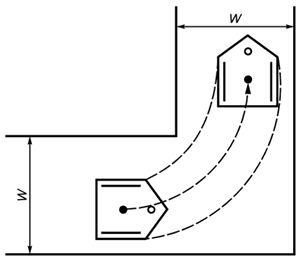
Рисунок А.3 - Ширина L-образного поворота мобильного робота
Библиография
[1] | ISO 7176-2 |
________________
| |
[2] | ISO 7176-13 |
________________
| |
[3] | ISO 8373:2012 |
________________
| |
[4] | ISO 9283 |
________________
| |
[5] | ISO 13482 |
________________
| |
[6] | IEC 60204-1 |
________________
| |
УДК 621.865:8:007.52:006.86 | ОКС 25.040.30 | ОКПД2 28.99.39.190 |
Ключевые слова: роботы, робототехнические устройства, сервисные роботы, мобильные роботы, колесные роботы, рабочие характеристики, методы испытаний | ||
Электронный текст документа
и сверен по:
, 2019
