ГОСТ Р 60.0.0.12-2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ОНТОЛОГИИ РОБОТОТЕХНИКИ
Понятия и отношения, описывающие групповое взаимодействие
Robots and robotic devices. Ontologies for robotics. Concepts and relations describing group interaction
ОКС 25.040.30
35.060
Дата введения 2024-01-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. N 854-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на все роботы и робототехнические устройства.
1 Область применения
Настоящий стандарт определяет онтологии, описывающие групповое взаимодействие роботов. Стандарт обеспечивает унифицированный способ представления знаний, понятий и отношений, в рамках группового взаимодействия роботов.
Настоящий стандарт предназначен для производителей роботов, системных интеграторов, конечных пользователей роботов (производителей деталей, поставщиков услуг и решений и т.д.), поставщиков оборудования для роботов, разработчиков программного обеспечения роботов и исследователей.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 60.0.0.8 Роботы и робототехнические устройства. Онтологии робототехники. Общие положения, основные понятия, термины и определения
ГОСТ Р 60.0.0.11 Роботы и робототехнические устройства. Онтологии робототехники. Понятия и отношения, описывающие функциональность и поведение
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1
агент (agent): Что-то или кто-то, способный действовать самостоятельно, и производить изменения в мире. [ГОСТ Р 60.0.0.8-2023, статья 5.6.2] |
3.2
артефакт (artifact): Искусственно созданный трехмерный объект. [ГОСТ Р 60.0.0.8-2023, статья 5.6.3] |
3.3
взаимодействие (interaction): Процесс [Процесс (Process) в SUMO], в котором участвуют два агента [Агент (Agent) в SUMO], состоящий из двух подпроцессов, определяющих действие и реакцию: подпроцесс действия, инициируемый агентом X для реципиента агента Y, вызывает подпроцесс реакции, имеющий Y в качестве агента и X в качестве реципиента. [ГОСТ Р 60.0.0.8-2023, статья 3.2] |
3.4
группа (group): Совокупность агентов. [ГОСТ Р 60.0.0.8-2023, статья 5.6.8] |
3.5
группа роботов (robot group): Группа [Группа (Group) в SUMO] роботов, организованная для достижения по крайней мере одной общей цели. [ГОСТ Р 60.0.0.8-2023, статья 3.5] |
3.6 групповая работа роботов (group work of robots): Целенаправленный процесс, в котором все члены группы роботов играют некоторую роль.
3.7
искусственная система (artificial system): Артефакт [Артефакт (Artifact) в SUMO], сформированный разными взаимодействующими устройствами [Устройство (Device) в SUMO] и другими объектами [Объект (Object) в SUMO] для выполнения некоторой функции. [ГОСТ Р 60.0.0.8-2023, статья 3.9] |
3.8
объект (object): Примерно соответствует классу обычных объектов. Примечание - Примерами являются обычные физические объекты, географические регионы, местоположения выполнения процессов и дополнения объектов в физическом классе. [ГОСТ Р 60.0.0.8-2023, статья 5.6.20] |
Примечание - В настоящем стандарте объект - это класс вещей, существующих в трехмерном пространстве, которые могут изменяться в результате процессов. Объект имеет пространственные части, существующие во времени одновременно.
3.9
процесс (process): Класс явлений, которые происходят и имеют временные (темпоральные) части или стадии. Примечание - Примеры включают длительные события, такие как футбольный матч или гонка, такие действия, как преследование и ожидание. Формальное определение таково: все, что происходит во времени, но не является объектом. [ГОСТ Р 60.0.0.8-2023, статья 5.6.24] |
3.10
робототехнический комплекс (robot system): Искусственная система, образованная одним или несколькими роботами и по меньшей мере одним устройством [Устройство (Device) в SUMO], поддерживающим работу робота (роботов). [ГОСТ Р 60.0.0.8-2023, статья 3.26] |
3.11
сущность (entity): Универсальный класс индивидуумов, корневой узел онтологии. [ГОСТ Р 60.0.0.8-2023, статья 5.6.26] |
3.12
устройство (device): Артефакт, предназначение которого состоит в том, чтобы служить инструментом в определенном подклассе процесса. [ГОСТ Р 60.0.0.8-2023, статья 5.6.29] |
3.13
целенаправленный процесс (intentional process): Изменение свойств некоторых объектов во времени и получение новых свойств этих объектов в соответствии с заданными целями. Примечание - См. [1]. [ГОСТ Р 60.0.0.11-2023, пункт 2.14] |
4 Общие положения
4.1 Понятия онтологий, определенные в данном стандарте, выделены курсивом.* Слитное написание понятий в одно слово применяется при описании классов онтологий и отношений между ними на языке OWL.
4.2 Онтология SUMO, определенная в ГОСТ Р 60.0.0.8, является онтологией верхнего уровня для онтологий робототехники. Базовая таксономия SUMO приведена на рисунке 1.
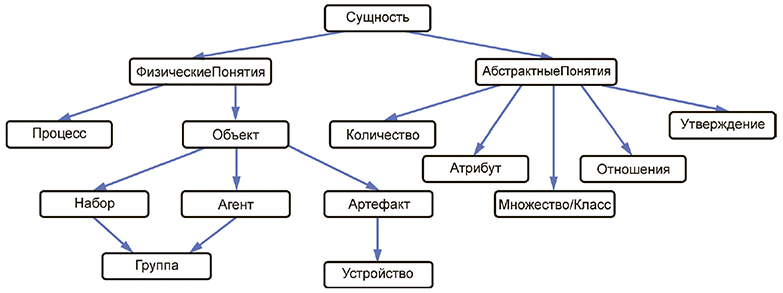 |
Рисунок 1 - Базовая таксономия SUMO
4.3 Понятия, связанные с базовой таксономией SUMO, на языке OWL:
Declaration (Class ( :АбстрактныеПонятия) )
Declaration (Class ( :Агент) )
Declaration (Class ( :Артефакт) )
Declaration (Class ( :Атрибут) )
Declaration (Class ( :Группа) )
Declaration (Class ( :Количество) )
Declaration (Class ( :Набор) )
Declaration (Class ( :Объект) )
Declaration (Class ( :Отношения) )
Declaration (Class ( :Процесс) )
Declaration (Class ( :Сущность) )
Declaration (Class ( :Устройство) )
Declaration (Class ( :Утверждение) )
Declaration (Class ( :ФизическиеПонятия) )
############################
# Classes
############################
# Class: :АбстрактныеПонятия ( :АбстрактныеПонятия)
SubClassOf ( :АбстрактныеПонятия :Сущность)
DisjointClasses ( :АбстрактныеПонятия :ФизическиеПонятия)
# Class: :Агент ( :Агент)
SubClassOf ( :Агент :Объект)
# Class: :Артефакт ( :Артефакт)
SubClassOf ( :Артефакт :Объект)
# Class: :Атрибут ( :Атрибут)
SubClassOf ( :Атрибут :АбстрактныеПонятия)
# Class: :Группа ( :Группа)
SubClassOf ( :Группа :Агент)
SubClassOf ( :Группа :Набор)
# Class: :Количество ( :Количество)
SubClassOf ( :Количество :АбстрактныеПонятия)
# Class: :Набор ( :Набор)
SubClassOf ( :Набор :Объект)
# Class: :Объект ( :Объект)
SubClassOf ( :Объект :ФизическиеПонятия)
# Class: :Отношения ( :Отношения)
SubClassOf ( :Отношения :АбстрактныеПонятия)
# Class: :Процесс ( :Процесс)
SubClassOf ( :Процесс :ФизическиеПонятия)
# Class: :Устройство ( :Устройство)
SubClassOf ( :Устройство :Артефакт)
# Class: :Утверждение ( :Утверждение)
SubClassOf ( :Утверждение :АбстрактныеПонятия)
# Class: :ФизическиеПонятия ( :ФизическиеПонятия)
SubClassOf ( :ФизическиеПонятия :Сущность)
4.4 С онтологией SUMO согласована онтология CORA. Это доменная онтология, описывающая концепции предметной области "Робототехника и автоматизация". Основным понятием в CORA является Робот, это понятие связано с большинством других понятий в этой онтологии (см. ГОСТ Р 60.0.0.8). В настоящем стандарте Робот - это устройство-агент, предназначенное действовать в физическом мире для выполнения одной или нескольких задач, имеющее в своем составе систему управления и интерфейс для взаимодействия с окружающим миром.
Таксономия понятий онтологии CORA, связанных с понятием Робот, показана на рисунке 2.
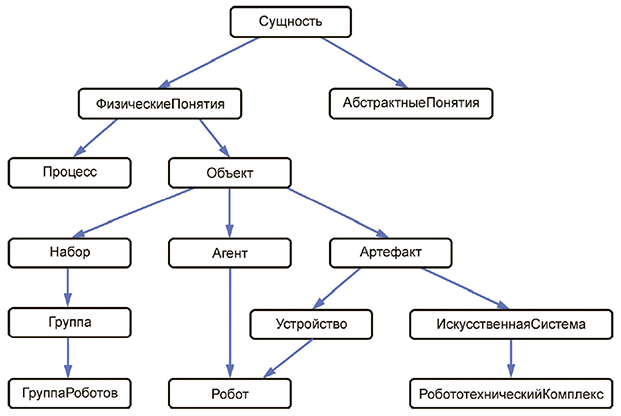 |
Рисунок 2 - Таксономия понятий онтологии CORA, связанных с понятием Робот
4.5 Таксономия понятий онтологии CORA, связанных с понятием Робот, на языке OWL:
Declaration (Class ( :АбстрактныеПонятия) )
Declaration (Class ( :Агент) )
Declaration (Class ( :Артефакт) )
Declaration (Class ( :Группа) )
Declaration (Class ( :ГруппаРоботов) )
Declaration (Class ( :ИскусственнаяСистема) )
Declaration (Class ( :Набор) )
Declaration (Class ( :Объект) )
Declaration (Class ( :Процесс) )
Declaration (Class ( :Робот) )
Declaration (Class ( :РобототехническийКомплекс) )
Declaration (Class ( :Сущность) )
Declaration (Class ( :Устройство) )
Declaration (Class ( :ФизическиеПонятия) )
############################
# Classes
############################
# Class: :АбстрактныеПонятия ( :АбстрактныеПонятия)
SubClassOf ( :АбстрактныеПонятия :Сущность)
# Class: :Агент ( :Агент)
SubClassOf ( :Агент :Объект)
# Class: :Артефакт ( :Артефакт)
SubClassOf ( :Артефакт :Объект)
# Class: :Группа ( :Группа)
SubClassOf ( :Группа :Набор)
# Class: :ГруппаРоботов ( :ГруппаРоботов)
SubClassOf ( :ГруппаРоботов :Группа)
# Class: :ИскусственнаяСистема ( :ИскусственнаяСистема)
SubClassOf ( :ИскусственнаяСистема :Артефакт)
# Class: :Набор ( :Набор)
SubClassOf ( :Набор :Объект)
# Class: :Объект ( :Объект)
SubClassOf ( :Объект :ФизическиеПонятия)
# Class: :Процесс ( :Процесс)
SubClassOf ( :Процесс :ФизическиеПонятия)
# Class: :Робот ( :Робот)
SubClassOf ( :Робот :Агент)
SubClassOf ( :Робот :Устройство)
# Class: :РобототехническийКомплекс ( :РобототехническийКомплекс)
SubClassOf ( :РобототехническийКомплекс :ИскусственнаяСистема)
# Class: :Устройство ( :Устройство)
SubClassOf ( :Устройство :Артефакт)
# Class: :ФизическиеПонятия ( :ФизическиеПонятия)
SubClassOf ( :ФизическиеПонятия :Сущность)
4.6 Важным дополнением CORA является онтология CORAX, которая представляет понятия и отношения, характерные для субдоменов предметной области "Робототехника и автоматизация", но являются слишком общими для включения в CORA (см. ГОСТ Р 60.0.0.8). Онтология CORAX определяет понятия ТехническийОблик и ОбъектПроектирования, таксономия которых показана на рисунке 3.
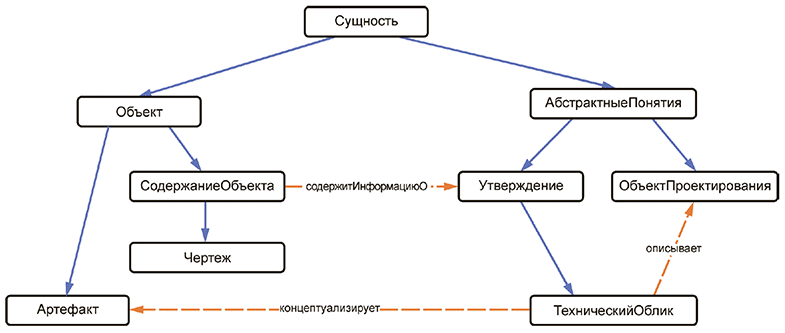 |
Рисунок 3 - Таксономия понятий ТехническийОблик и ОбъектПроектирования онтологии CORAX
4.7 Таксономия понятий ТехническийОблик и ОбъектПроектирования онтологии CORAX на языке OWL:
Declaration (Class ( :АбстрактныеПонятия) )
Declaration (Class ( :Артефакт) )
Declaration (Class ( :ОбъектПроектирования) )
Declaration (Class ( :Объект) )
Declaration (Class ( :СодержаниеОбъекта) )
Declaration (Class ( :Сущность) )
Declaration (Class ( :ТехническийОблик) )
Declaration (Class ( :Утверждение) )
Declaration (Class ( :Чертеж) )
Declaration (ObjectProperty ( :концептуализирует) )
Declaration (ObjectProperty ( :описывает) )
Declaration (ObjectProperty ( :содержитИнформациюО) )
############################
# Object Properties
############################
# Object Property: :концептуализирует ( :концептуализирует)
AsymmetricObjectProperty ( :концептуализирует)
ObjectPropertyDomain ( :концептуализирует :ТехническийОблик)
ObjectPropertyRange ( :концептуализирует :Артефакт)
# Object Property: :описывает ( :описывает)
AsymmetricObjectProperty ( :описывает)
ObjectPropertyDomain ( :описывает :ТехническийОблик)
ObjectPropertyRange (описывает :ОбъектПроектирования)
# Object Property: :содержитИнформациюО ( :содержитИнформациюО)
ObjectPropertyDomain ( :содержитИнформациюО :СодержаниеОбъекта)
ObjectPropertyRange ( :содержитИнформациюО :Утверждение)
############################
# Classes
############################
# Class: :АбстрактныеПонятия ( :АбстрактныеПонятия)
SubClassOf ( :АбстрактныеПонятия :Сущность)
# Class: :Артефакт ( :Артефакт)
SubClassOf ( :Артефакт :Объект)
# Class: :ОбъектПроектирования ( :ОбъектПроектирования)
SubClassOf ( :ОбъектПроектирования :АбстрактныеПонятия)
# Class: :Объект ( :Объект)
SubClassOf ( :Объект :Сущность)
# Class: :СодержаниеОбъекта ( :СодержаниеОбъекта)
SubClassOf ( :СодержаниеОбъекта :Объект)
# Class: :ТехническийОблик ( :ТехническийОблик)
SubClassOf ( :ТехническийОблик :Утверждение)
# Class: :Утверждение ( :Утверждение)
SubClassOf ( :Утверждение :АбстрактныеПонятия)
# Class: :Чертеж ( :Чертеж)
SubClassOf ( :Чертеж :СодержаниеОбъекта)
5 Онтологии робототехники, описывающие групповое взаимодействие
5.1 В настоящем стандарте используются понятия ИскусственнаяСистема и Взаимодействие онтологии CORAX (см. ГОСТ Р 60.0.0.8), таксономия которых приведена на рисунке 4.
Искусственная система представляет собой артефакт, образованный различными устройствами (и другими объектами), которые взаимодействуют друг с другом для выполнения функции. Взаимодействие - это процесс, состоящий из двух субпроцессов, которые определяют действие и реакцию.
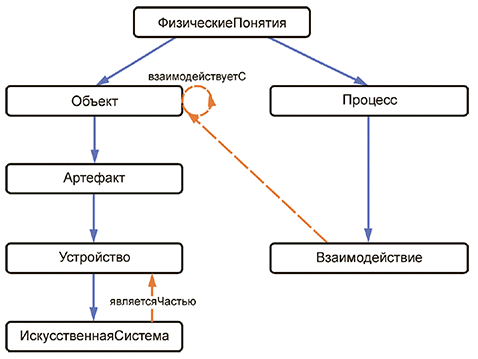 |
Рисунок 4 - Таксономия понятий ИскусственнаяСистема и Взаимодействие онтологии CORAX
5.2 Таксономия понятий ИскусственнаяСистема и Взаимодействие онтологии CORAX на языке OWL:
Declaration (Class ( :Артефакт) )
Declaration (Class ( :Взаимодействие) )
Declaration (Class ( :ИскусственнаяСистема) )
Declaration (Class ( :Объект) )
Declaration (Class ( :Процесс) )
Declaration (Class ( :Устройство) )
Declaration (Class ( :ФизическиеПонятия) )
Declaration (ObjectProperty ( :взаимодействуетС) )
Declaration (ObjectProperty ( :являетсяЧастью) )
############################
# Object Properties
############################
# Object Property: :взаимодействуетС ( :взаимодействуетС)
SymmetricObjectProperty ( :взаимодействуетС)
ObjectPropertyDomain ( :взаимодействуетС :Объект)
ObjectPropertyRange ( :взаимодействуетС :Объект)
# Object Property: :являетсяЧастью ( :являетсяЧастью)
ObjectPropertyDomain ( :являетсяЧастью :ИскусственнаяСистема)
ObjectPropertyRange ( :являетсяЧастью :Устройство)
############################
# Classes
############################
# Class: :Артефакт ( :Артефакт)
SubClassOf ( :Артефакт :Объект)
# Class: :Взаимодействие ( :Взаимодействие)
EquivalentClasses ( :Взаимодействие ObjectSomeValuesFrom ( :взаимодействуетС
:Объект) )
SubClassOf ( :Взаимодействие :Процесс)
# Class: :ИскусственнаяСистема ( :ИскусственнаяСистема)
SubClassOf ( :ИскусственнаяСистема :Устройство)
# Class: :Объект ( :Объект)
SubClassOf ( :Объект :ФизическиеПонятия)
# Class: :Процесс ( :Процесс)
SubClassOf ( :Процесс :ФизическиеПонятия)
# Class: :Устройство ( :Устройство)
SubClassOf ( :Устройство :Артефакт)
5.3 Группа роботов - это группа, то есть совокупность агентов, состоящая исключительно из роботов. Группа роботов является также агентом. Таксономия понятия ГруппаРоботов приведена на рисунке 5.
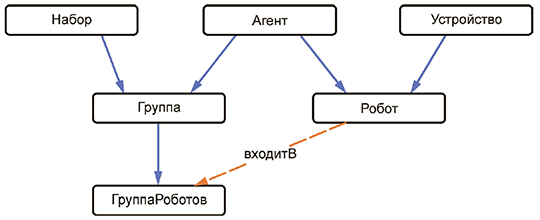 |
Рисунок 5 - Таксономия понятия ГруппаРоботов
5.4 Таксономия понятия Группа Роботов на языке OWL:
Declaration (Class ( :Агент) )
Declaration (Class ( :Группа) )
Declaration (Class ( :ГруппаРоботов) )
Declaration (Class ( :Набор) )
Declaration (Class ( :Робот) )
Declaration (Class ( :Устройство) )
Declaration (ObjectProperty ( :входитВ) )
############################
# Object Properties
############################
# Object Property: :входитВ ( :входитВ)
ObjectPropertyDomain ( :входитВ :Робот)
ObjectPropertyRange ( :входитВ :ГруппаРоботов)
############################
# Classes
############################
# Class: :Группа ( :Группа)
SubClassOf ( :Группа :Агент)
SubClassOf ( :Группа :Набор)
# Class: :ГруппаРоботов ( :ГруппаРоботов)
SubClassOf ( :ГруппаРоботов :Группа)
# Class: :Робот ( :Робот)
SubClassOf ( :Робот :Агент)
SubClassOf ( :Робот :Устройство)
5.5 Робототехнический комплекс относится к классу искусственная система. Таксономия понятия РобототехническийКомплекс показана на рисунке 6 (см. ГОСТ Р 60.0.0.8).
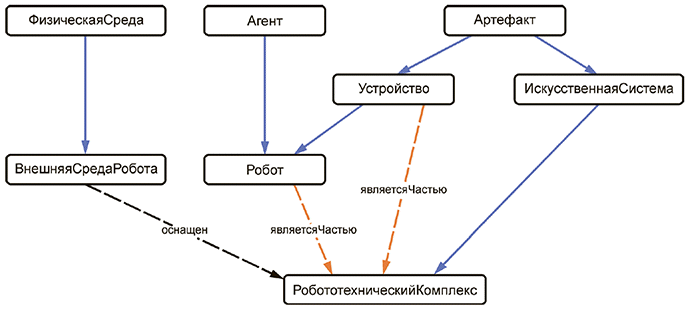 |
Рисунок 6 - Таксономия понятия РобототехническийКомплекс
5.6 Таксономия понятия РобототехническийКомплекс на языке OWL:
Declaration (Class ( :Агент) )
Declaration (Class ( :Артефакт) )
Declaration (Class ( :ВнешняяСредаРобота) )
Declaration (Class ( :ИскусственнаяСистема) )
Declaration (Class ( :Робот) )
Declaration (Class ( :РобототехническийКомплекс) )
Declaration (Class ( :Устройство) )
Declaration (Class ( :ФизическаяСреда) )
Declaration (ObjectProperty ( :оснащен) )
Declaration (ObjectProperty ( :являетсяЧастью) )
############################
# Object Properties
############################
# Object Property: :оснащен ( :оснащен)
SubObjectPropertyOf ( :оснащен owl:topObjectProperty)
AsymmetricObjectProperty ( :оснащен)
ObjectPropertyDomain ( :оснащен :ВнешняяСредаРобота)
ObjectPropertyRange ( :оснащен :РобототехническийКомплекс)
# Object Property: :являетсяЧастью ( :являетсяЧастью)
ObjectPropertyDomain ( :являетсяЧастью :Робот)
ObjectPropertyDomain ( :являетсяЧастью :Устройство)
ObjectPropertyRange ( :являетсяЧастью :РобототехническийКомплекс)
############################
# Classes
############################
# Class: :ИскусственнаяСистема ( :ИскусственнаяСистема)
SubClassOf ( :ИскусственнаяСистема :Артефакт)
# Class: :Робот ( :Робот)
SubClassOf ( :Робот :Агент)
SubClassOf ( :Робот :Устройство)
# Class: :РобототехническийКомплекс ( :РобототехническийКомплекс)
SubClassOf ( :РобототехническийКомплекс :ИскусственнаяСистема)
# Class: :ВнешняяСредаРобота ( :ВнешняяСредаРобота)
SubClassOf ( :ВнешняяСредаРобота :ФизическаяСреда)
# Class: :Устройство ( :Устройство)
SubClassOf ( :Устройство :Артефакт)
5.7 Все роботы некоторого коллективного робототехнического комплекса должны быть членами одной группы роботов, в том числе если между роботами отсутствует прямое взаимодействие, например на автоматизированной сборочной линии. Таксономия понятия КоллективныйРобототехническийКомплекс показана на рисунке 7.
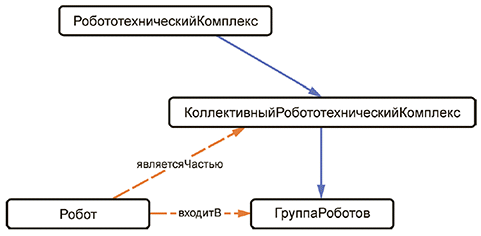 |
Рисунок 7 - Таксономия понятия КоллективныйРобототехническийКомплекс
5.8 Таксономия понятия КоллективныйРобототехническийКомплекс на языке OWL:
Declaration (Class ( :ГруппаРоботов) )
Declaration (Class ( :КоллективныйРобототехническийКомплекс) )
Declaration (Class ( :Робот) )
Declaration (Class ( :РобототехническийКомплекс) )
Declaration (ObjectProperty ( :входитВ) )
Declaration (ObjectProperty ( :являетсяЧастью) )
############################
# Object Properties
############################
# Object Property: :входитВ ( :входитВ)
ObjectPropertyDomain ( :входитВ :Робот)
ObjectPropertyRange ( :входитВ :ГруппаРоботов)
# Object Property: :являетсяЧастью ( :являетсяЧастью)
ObjectPropertyDomain ( :являетсяЧастью :Робот)
ObjectPropertyRange ( :являетсяЧастью :КоллективныйРобототехническийКомплекс)
############################
# Classes
############################
# Class: :ГруппаРоботов ( :ГруппаРоботов)
SubClassOf ( :ГруппаРоботов :КоллективныйРобототехническийКомплекс)
# Class: :КоллективныйРобототехническийКомплекс
( :КоллективныйРобототехническийКомплекс)
SubClassOf ( :КоллективныйРобототехническийКомплекс : РобототехническийКомплекс)
# Class: :Робот ( :Робот)
SubClassOf ( :Робот :ГруппаРоботов)
SubClassOf ( :Робот :КоллективныйРобототехническийКомплекс)
5.9 Групповое взаимодействие роботов возникает в рамках выполнения некоторого целенаправленного процесса групповой работы роботов, в котором все члены группы имеют некоторые роли (см. ГОСТ Р 60.0.0.11). Роль робота относится к конкретному возникновению процесса и не является постоянной. Один и тот же робот может одновременно играть несколько ролей в разных субпроцессах процесса групповой работы. Взаимодействие роботов может быть как информационным, так и физическим (например, механическим).
5.10 Информационное взаимодействие роботов - это любой процесс, связанный с передачей информации между роботами в количестве от двух и более.
5.11 Роли роботов в процессе групповой работы определяются техническим обликом группы роботов.
УДК 621.865.8:165:005.94:006.354 | ОКС 25.040.30 35.060 |
Ключевые слова: роботы, робототехнические устройства, онтология, робототехника, группа, взаимодействие | |
