ГОСТ Р ИСО 15230-2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ОПРЕДЕЛЕНИЕ СИЛ В ОБЛАСТИ КОНТАКТА ЧЕЛОВЕКА С МАШИНОЙ ПРИ ВОЗДЕЙСТВИИ ЛОКАЛЬНОЙ ВИБРАЦИИ
Mechanical vibration - Coupling forces at the man-machine interface for hand-transmitted vibration
ОКС 13.160
Дата введения 2015-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 24 октября 2014 г. N 1424-ст.
4 Настоящий стандарт является идентичным по отношению к международному стандарту ИСО 15230:2007* "Вибрация. Определение сил в области контакта человека с машиной при воздействии локальной вибрации" (ISO 15230:2007 "Mechanical vibration - Coupling forces at the man-machine interface for hand-transmitted vibration").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (gost.ru)
Введение
Силы, действующие в области контакта кисти руки работника с ручной машиной или машиной с ручным управлением, являются важными характеристиками с точки зрения оценки воздействия вибрации на работника.
Силы, действующие в области контакта, состоят из двух компонентов. Первый - это сила, прилагаемая кистью руки для обеспечения необходимого управления машиной с целью, в конечном итоге, достигнуть желаемой производительности. Эта квазистатическая сила (на частотах ниже 5 Гц) является основным предметом рассмотрения настоящего стандарта. Второй компонент - биодинамическая сила, представляющая собой биодинамический ответ кисти руки на воздействующую вибрацию.
Различия в способах контакта руки с вибрирующей поверхностью могут повлиять на эффект воздействия вибрации на организм работника разными способами:
- изменением соотношения между вибрацией на рукоятке машины и вибрацией, передаваемой в систему "кисть - рука" работника;
- изменением функциональных систем организма работника (сосудистой, нервной, костной, связочно-суставной), на которые вибрация будет оказывать негативное влияние.
К настоящему времени проведены многочисленные исследования с моделированием воздействия вибрации на организм работника для оценки влияния на эффект этого воздействия сил подачи и охвата, создаваемых кистью руки. Настоящий стандарт устанавливает формат представления данных, позволяющий обобщать результаты подобных исследований.
Предполагается, что в будущем нормирование вибрации на рабочем месте будет осуществляться не только на основании параметров собственно вибрации, но и с учетом сил в области контакта работника с машиной.
1 Область применения
Настоящий стандарт устанавливает параметры, характеризующие контакт кисти руки оператора с вибрирующей поверхностью машины, включая параметры силового воздействия (сила нажатия, сила охвата) и давления на кожу кисти руки оператора, а также руководство по проведению измерений указанных параметров силы и давления, включая требования к средствам измерений и их калибровке.
Настоящий стандарт не распространяется на оценку сил, действующих в тангенциальном направлении к области контакта.
2 Обозначения и сокращения
2.1 Обозначения
В настоящем стандарте применены следующие обозначения.
F - сила;
i - индекс суммирования (целое число);
n - общее число суммируемых элементов;
p - локальное давление на i-й элемент поверхности;
S - поверхность;
t - время;
Т - продолжительность операции;
- угол между осью руки и разделяющей плоскостью;
- угол между осью машины и разделяющей плоскостью;
- коэффициент пропорциональности для силы охвата;
- коэффициент пропорциональности для силы нажатия.
2.2 Сокращения
В настоящем стандарте применены следующие сокращения.
BD - при использовании в качестве подстрочного индекса указывает на отношение к биодинамической силе;
с - при использовании в качестве подстрочного индекса указывает на отношение к контакту руки с машиной;
coup - при использовании в качестве подстрочного индекса указывает на отношение к соединению в области контакта;
f - при использовании в качестве подстрочного индекса указывает на отношение к воздействию на машину;
g - при использовании в качестве подстрочного индекса указывает на отношение к направляющему воздействию на машину;
gr - при использовании в качестве подстрочного индекса указывает на отношение к силе охвата;
I - при использовании в качестве подстрочного индекса указывает на отношение к подъему машины;
m - при использовании в качестве подстрочного индекса указывает на среднее значение величины;
max - при использовании в качестве подстрочного индекса указывает на максимальное значение величины;
n - при использовании в качестве подстрочного индекса указывает на нормальную составляющую векторной величины;
pu - при использовании в качестве подстрочного индекса указывает на отношение к силе нажатия;
х, у, z - оси декартовой системы координат.
3 Параметры, характеризующие воздействие в области контакта
3.1 Давление на кожный покров
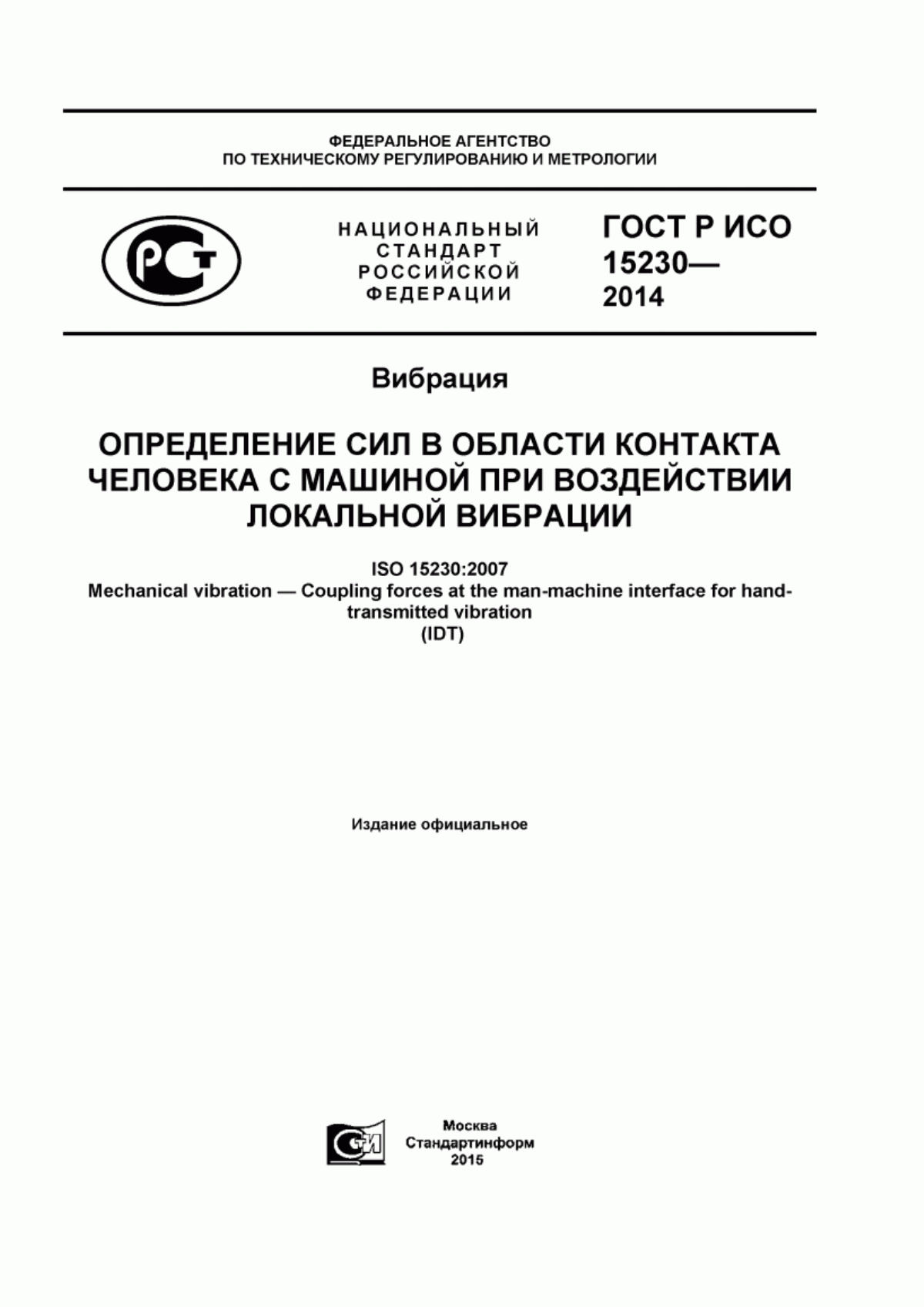
3.1.1 Элемент поверхности
Площадь элемента поверхности определяют в векторном виде
через единичный вектор нормали
к элементу поверхности
(см. рисунок 1) по формуле
![]() . (1)
. (1)
3.1.2 Локальное давление
Локальное давление , приложенное к элементу поверхности кожи кисти руки
определяется отношением нормальной составляющей силы в центре элемента поверхности
(см. 3.1.5) к площади элемента поверхности
по формуле
![]() . (2)
. (2)
Указывать значение локального давления необходимо совместно с площадью элемента поверхности, к которому это давление приложено.
Примечание - Локальное давление в области контакта кисти руки оператора с машиной зависит от механических характеристик системы "кисть - рука" оператора, положения кисти, особенностей работы оператора, применяемого инструмента и выполняемого рабочего задания и варьируется обычно в диапазоне от нуля до 0,8 Н/м. Давление свыше 0,8 Н/м
может сопровождаться болевыми ощущениями.
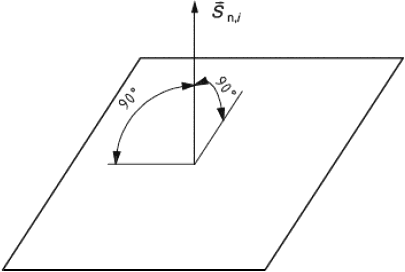
Рисунок 1 - Нормаль к элементу поверхности
3.1.3 Среднее давление
Среднее давление , приложенное к кисти руки в области контакта оператора с машиной, рассчитывают по n элементам поверхности, составляющим область контакта, по формуле
 . (3)
. (3)
3.1.4 Максимальное локальное давление
Максимальным локальным давлением называют наибольшее из локальных давлений в области контакта кисти руки оператора с машиной:
![]() . (4)
. (4)
3.1.5 Элемент силы
Элемент силы в области контакта определяют по формуле
![]() , (5)
, (5)
где - локальное давление на i-й элемент поверхности кожи в области контакта;
- площадь i-го элемента поверхности.
Вектор элемента силы направлен перпендикулярно элементу поверхности.
3.2 Толкающая или тянущая сила
Толкающую силу (некомпенсированную другими силами в области контакта) оператор прикладывает каждой кистью руки к вибрирующей поверхности в направлении от плеча. Тянущую силу
оператор прикладывает каждой кистью руки к вибрирующей поверхности в направлении к плечу (см. рисунок 2).
Примечание 1 - В некоторых случаях оператор прилагает толкающую и тянущую силу одновременно в разных областях контакта. Тем не менее, для обозначения каждой из этих сил используют один и тот же символ .
Примечание 2 - Толкающая сила может быть весьма значительной, например при выполнении операции сверления, поэтому ее всегда необходимо принимать во внимание.
|
|
а) Толкающая сила | b) Тянущая сила |
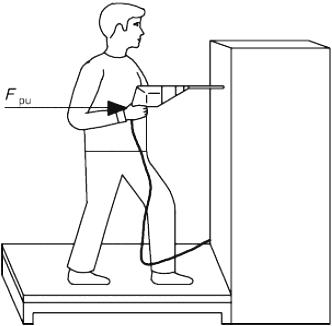
Рисунок 2 - Примеры толкающей/тянущей силы
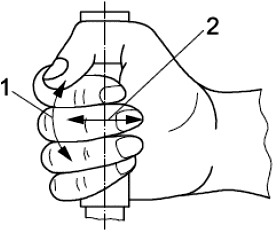
3.3 Управляющая сила
Управляющую силу (некомпенсированную другими силами в области контакта) оператор прикладывает кистью руки в горизонтальном (или близком к нему) направлении перпендикулярно толкающей/тянущей силе с целью придать машине, объекту обработки или рычагу управления правильное положение или движение (см. рисунок 3).
Примечание - Для контроля перемещения объекта управления в горизонтальной плоскости обычно достаточно приложения небольшой управляющей силы .
3.4 Поддерживающая сила
Поддерживающую силу оператор прикладывает с целью противодействовать весу машины (см. рисунок 4).
Примечание - В некоторых случаях поддерживающая сила может быть равной толкающей/тянущей силе
[см. рисунок 4а)].
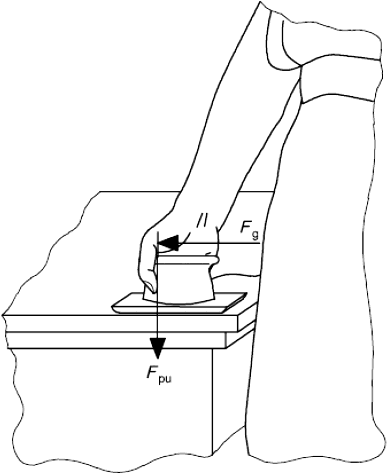
Рисунок 3 - Пример управляющей силы (с указанием толкающей силы
)
|
|
|
a) | b) | c) |
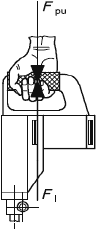
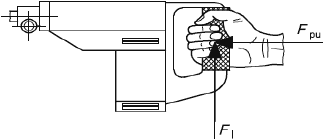
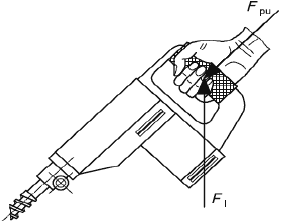
Рисунок 4 - Пример поддерживающей силы (с указанием толкающей силы
)
3.5 Сила обхвата
Сила обхвата равна векторной полусумме всех элементов силы в области контакта (без учета элементов, составляющих толкающую/тянущую и поддерживающую силы), направленных к оси обхватываемой рукоятки и действующих на рукоятку с одной стороны от разделительной плоскости, проходящей через эту ось. Векторная сумма всех учитываемых элементов силы в области контакта равна нулю и может быть представлена в виде суммы двух противодействующих векторных сил обхвата, направленных навстречу друг другу перпендикулярно разделяющей плоскости (см. рисунок 5).
Примечание 1 - Если оператор удерживает рукоятку цилиндрической формы, то направление силы обхвата принимают параллельным оси z.
Примечание 2 - Поскольку давление со стороны кисти оператора распределено по области обхвата рукоятку неравномерно, то модуль силы обхвата в общем случае будет зависеть от положения разделительной плоскости. Направления силы обхвата, при которых ее модуль будет максимальным и минимальным, зависят от размеров рукоятки, размеров кисти руки оператора и способа, которым оператор обхватывает рукоятку. Для простоты в целях проведения лабораторных измерений за направление силы обхвата принимают ось z вдоль предплечья руки оператора [см. рисунок 5b)].
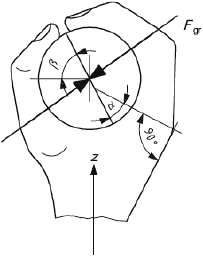
3.6 Сила подачи
Силой подачи называют внешнюю силу, действующую со стороны оператора на машину (см. рисунок 6).
|
|
a) Поле давления р | b) Сила обхвата |
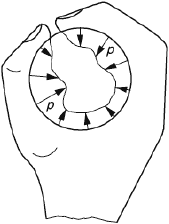
- угол, определяющий положение разделительной плоскости относительно кисти руки;
- угол, определяющий положение разделительной плоскости относительно рукоятки
Примечание - Ось z направлена вдоль предплечья руки оператора.
Рисунок 5 - Пример силы обхвата
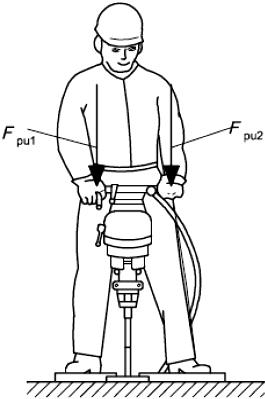
Рисунок 6 - Пример силы подачи
Примечание - В примере на рисунке 6 сила подачи равна сумме толкающих сил
и
, в то время как в примере на рисунке 2a) она равна толкающей силе
.
3.7 Контактная сила
В общем случае контактная сила зависит от всех сил, действующих в области контакта кисти руки оператора с вибрирующей поверхностью, и определяется как нормированный интеграл элементов силы (см. 3.1.5) по области контакта. В принципе силу, действующую на каждый элемент поверхности, можно разбить на нормальную (к поверхности) и тангенциальную составляющую, однако тангенциальные составляющие в настоящем стандарте не рассматриваются ввиду сложности их измерения. Контактная сила пропорциональна среднему давлению на поверхность в области контакта, но она не отражает распределения давления по поверхности, т.е. не содержит информацию о моментах сил (см. 3.9), которые могут уравновешивать действие внешних моментов.
Учет только нормальных составляющих сил, действующих в области контакта, оказывается, тем не менее, достаточным с точки зрения описания передаваемой вибрации на кисть руки оператора (см. рисунок 7).
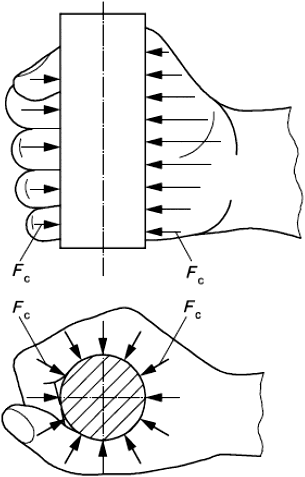
Рисунок 7 - Примеры контактной силы
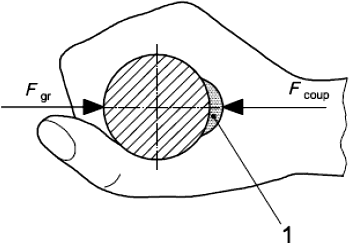
Из определения контактной силы следует, что ее можно рассчитать как интеграл от давления на поверхность в области контакта по области контакта. Исследования показали, что общую статическую силу контакта связывает с толкающей силой
и силой обхвата
[действующей вдоль оси z, как показано на рисунке 5b)] линейная зависимость вида
![]() , (6)
, (6)
где и
- коэффициенты пропорциональности.
Примечание 1 - Согласно результатам проведенных исследований для цилиндрических рукояток диаметром от 30 до 50 мм коэффициент близок к трем, а
- к единице. Для рукояток малых диаметров коэффициент
больше.
Примечание 2 - Соотношение между вкладами силы обхвата и толкающей силы может изменяться при изменении конфигурации и размеров рукоятки, а также в зависимости от того, смыкается ли большой палец кисти руки с другими пальцами при обхвате.
3.8 Сила связи
Силой связи называют сумму толкающей/тянущей силы и силы обхвата:
![]() . (7)
. (7)
Примечание 1 - В настоящем стандарте сила связи между рукой оператора и рукояткой или управляющим рычагом машины упрощенно определена только через две силы, и
, но теоретически должна включать также биодинамические силы (см. приложение А).
Примечание 2 - Ряд исследований показал, что с точки зрения воздействия передаваемой на руку вибрации практически не имеет значения, обусловлена ли сила связи толкающей/тянущей силой или силой обхвата, поэтому в формулу (7) эти силы входят с одинаковым весом.
Примечание 3 - Определение контактной силы связано с большими трудностями, чем определение силы связи.
3.9 Момент силы и сила трения
В настоящем стандарте не рассматриваются силы, тангенциальные к поверхности контакта (например, сила трения) и способные создавать момент силы, однако ниже на примерах показано действие этих сил.
Моменты силы, указанные на рисунках 8а) и b), невозможны без действия силы обхвата, толкающей/тянущей силы или поддерживающей силы.
Сила трения, указанная на рисунке 8b), невозможна без действия силы обхвата, толкающей/тянущей силы или поддерживающей силы.
|
|
a) | b) |
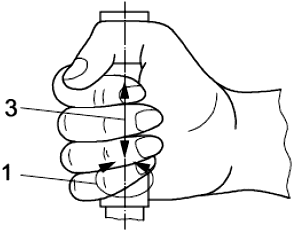
1 - момент;
2 - толкающая/тянущая сила; 3 - трение
Рисунок 8 - Примеры моментов силы и силы трения
Приложение А
(справочное)
Воздействие биодинамических сил
А.1 Биодинамические силы
Биодинамическая сила в области контакта между системой "кисть - рука" и вибрирующей поверхностью (машины или объекта обработки) является результатом динамического отклика системы на вибрацию. Следовательно, ее значение зависит, в первую очередь, от эффективной массы системы в области контакта и передаваемой от поверхности контакта вибрации.
А.2 Методы измерения и оценки
Биодинамическая сила может быть разложена на три ортогональные составляющие в направлении осей х, у и z и измерена непосредственно с помощью датчиков силы, прикрепленным к рукояткам, перчаткам оператора или его ладоням. Она может быть измерена вместе со статическими силами и затем выделена фильтром верхних частот с частотой среза выше 5 Гц. Другим возможным вариантом является измерение ускорения в трех указанных направлениях с последующим преобразованием в сигнал силы при известных значениях эффективной массы (механического импеданса) системы "кисть - рука" в диапазоне частот измерений. В первом приближении для оценки среднеквадратичного значения составляющей биодинамической силы
![]() в J-м направлении (J принимает значения х, у или z) на угловой частоте
в J-м направлении (J принимает значения х, у или z) на угловой частоте можно использовать одну из следующих формул:
![]() ; (A.1)
; (A.1)
![]() . (А.2)
. (А.2)
где ![]() - модуль входной эффективной массы системы "кисть - рука" в области контакта на угловой частоте
- модуль входной эффективной массы системы "кисть - рука" в области контакта на угловой частоте в J-м направлении;
![]() - модуль входного механического импеданса системы "кисть - рука" в области контакта на угловой частоте
- модуль входного механического импеданса системы "кисть - рука" в области контакта на угловой частоте в J-м направлении;
![]() - среднеквадратичное значение ускорения вибрирующей поверхности в области контакта на угловой частоте
- среднеквадратичное значение ускорения вибрирующей поверхности в области контакта на угловой частоте в J-м направлении.
А.3 Основные свойства биодинамической силы
Поскольку эффективная масса системы "кисть - рука" обычно уменьшается с ростом частоты, динамическая сила, как правило, значительно выше, если машина генерирует преимущественно низкочастотную (ниже 40 Гц), а не высокочастотную (свыше 100 Гц) вибрацию. Низкочастотная биодинамическая сила может быть сопоставима со статической силой, прикладываемой оператором. Эффективная масса системы обычно максимальна в направлении z (т.е. вдоль предплечья руки оператора), поэтому в данном направлении также обычно максимальна и биодинамическая сила. Как правило, биодинамическая сила максимальна на доминирующей частоте вибрации. Низшая частота собственных колебаний системы "кисть - рука" находится, как правило, в диапазоне от 10 до 63 Гц. Если доминирующая частота машины близка к частоте резонанса, то биодинамическая сила может стать особенно значительной. На частотах ниже 100 Гц биодинамическая сила сосредоточена преимущественно в области ладони, а на высоких частотах распределена почти равномерно по всей кисти руки.
Приложение В
(рекомендуемое)
Расчет силы обхвата и толкающей/тянущей силы по измерениям давления
B.1 Общие положения
Толкающую/тянущую силу, силу обхвата и силу связи можно рассчитать, зная распределение локального давления по поверхности обхвата и геометрию этой поверхности. Важно также знать угол между измерительной поверхностью датчика и выбранным направлением силы обхвата. Существующая техника измерений позволяет построить распределение давления в области обхвата без применения интерполяций. К последним прибегают, если число датчиков недостаточно, чтобы покрыть всю область контакта кисти руки с вибрирующей поверхностью.
B.2 Толкающая/тянущая сила
Для расчета толкающей/тянущей силы (см. рисунок В.1) используют формулу
![]() . (В.1)
. (В.1)
|
|
a) Эллиптическая рукоятка | b) Круглая рукоятка |
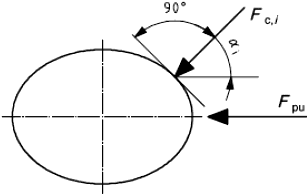
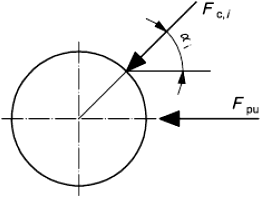
Рисунок В.1 - Определение угла между направлениями действия нормального к поверхности элемента силы и толкающей/тянущей силы
Если направление силы подачи не совпадает с направлением толкающей/тянущей силы, то целесообразно определять результирующую этих двух сил по формуле
![]() ,
,
где и
- единичные векторы координатных осей.
Примечание - - векторная величина, которую измеряют в плоскости, перпендикулярной к оси рукоятки. Эта величина содержит информацию о позе оператора во время испытания, и ее направление может изменяться со временем.
B.3 Сила обхвата
Пояснения величин, определяющих силу обхвата, дано на рисунке В.2.
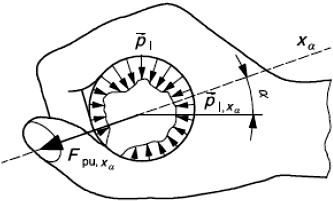
Рисунок В.2 - Величины, характеризующие условия обхвата
Силу обхвата рассчитывают следующим образом.
Вычисляют силу обхвата , действующей во всех возможных направлениях оси
, проходящей через центр рукоятки, по формуле
![]() . (В.2)
. (В.2)
где - проекция силы, воспринимаемой i-м датчиком, на ось
;
![]() - проекция толкающей силы на ось
- проекция толкающей силы на ось .
Определяют силу обхвата ![]() , ориентированную в зависимости от направления толкающей силы, как значение
, ориентированную в зависимости от направления толкающей силы, как значение , рассчитанное по формуле (В.2) для оси
, совпадающей с направлением силы
(способным изменяться во времени в зависимости от позы оператора - см. раздел В.2),
![]() , т.е.
, т.е.
 , (В.3)
, (В.3)
Определяют максимальное значение силы обхвата по всем возможным направлениям, определяемым углом
:
![]() . (В.4)
. (В.4)
Примечание - Значения ![]() и
и ![]() всегда больше нуля.
всегда больше нуля.
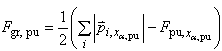
В.4 Сила связи
Силу связи (см. рисунок В.3) рассчитывают по формуле
![]() . (B.5)
. (B.5)
1 - датчик
Рисунок В.3 - Пример схемы измерений силы связи
Приложение С
(рекомендуемое)
Измерения и обработка результатов
С.1 Общие положения
Измерения контактной силы сложны и на практике не могут быть реализованы в полном объеме. Поэтому измерениям подлежат наиболее важные ее компоненты, такие как толкающая/тянущая сила, сила обхвата, а также давление в области обхвата.
Применяемые средства измерений должны создавать минимальные помехи нормальной работе оператора и не должны изменять динамические частотные характеристики машины.
При оценке воздействия вибрации на работника вибрацию желательно измерять одновременно с параметрами, характеризующими условия контакта кисти руки оператора с вибрирующей поверхностью. Но ввиду сложности таких измерений допускается параметры контакта измерять отдельно (в другое время) в тех же условиях, при которых были проведены измерения вибрации.
Измерения следует проводить калиброванной измерительной системой (см. приложение Е).
До и после каждой серии измерений следует проверять калибровку измерительной цепи.
При проведении измерений следует регистрировать позу оператора, условия его работы и условия работы машины.
С.2 Измерения толкающей/тянущей силы
Применение многих ручных машин и машин с ручным управлением требует приложения оператором толкающей или тянущей силы в направлении оси предплечья, как показано на рисунках 2 и 4.
Применяют два основных метода измерений:
- прямой метод, при котором датчики размещают между кистью руки и вибрирующей поверхностью (см., например, рисунок В.3);
- косвенный метод, при котором измеряют результирующую силу, действующую на оператора или машину [например, с помощью силовой платформы, изображенной на рисунке 2 а)].
Косвенный метод может быть использован только в том случае, когда оператор в процессе выполнения рабочего задания сохраняет свое положение неизменным и прикладывает толкающую/тянущую силу одной рукой (либо если толкающая/тянущая сила поровну распределена между обеими руками).
С.3 Измерения силы обхвата
Применяют два основных метода измерений:
- прямой метод, при котором датчики размещают между пальцами кисти руки оператора и вибрирующей поверхностью;
- косвенный метод, при котором вначале измеряют силу связи между ладонью оператора и вибрирующей поверхностью, а также толкающую/тянущую силу, после чего силу обхвата рассчитывают как результирующую двух указанных сил.
С.4 Измерения давления на кожный покров
Измерения проводят с использованием датчиков давления, которые фиксируют либо непосредственно в области обхвата с помощью двусторонней клеящей ленты или других аналогичных приспособлений, либо на хирургических перчатках. В последнем случае важно размещать датчики в тех местах, где ожидается максимальное давление.
С.5 Обработка временных сигналов
Рекомендуется регистрировать временные сигналы силы или давления в диапазоне частот до 5 Гц.
При исследовании динамических сил рекомендуется записывать сигнал в диапазоне частот, верхняя граница которого по крайней мере в три раза превышает доминирующую частоту вибрации, после чего проводить анализ сигналов в частотной области.
С.6 Усреднение
При необходимости характеризовать переменную силу F(t) или давление р(t), зарегистрированные при выполнении измерений во время проведения операции, одним числом используют среднее значение модуля силы или среднее значение давления
, рассчитываемые по формулам:
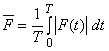 ; (C.1)
; (C.1)
 ; (C.2)
; (C.2)
где Т - продолжительность измерений.
Под операцией понимают любой период работы машины, во время которого оператор подвергается воздействию локальной вибрации. Продолжительность измерений должна быть достаточной, чтобы характеризовать измеряемые сигналы, и обычно не менее 8 с.
Примечание - В случае измерения силы обхвата F(t) всегда больше нуля.
С.7 Регистрируемая информация
Протокол измерений должен включать в себя, по возможности, следующие сведения:
a) общую информацию об измерениях:
- наименование заказчика измерений и организации, проводившей измерения,
- цель проведения измерений,
- дату проведения измерений,
- имя оператора, подвергавшегося воздействию вибрации;
- имя сотрудника, проводившего измерения и обработку данных;
b) условия рабочего места:
- место проведения измерений,
- температура (окружающего воздуха, вибрирующей поверхности),
- относительная влажность воздуха;
c) условия измерений:
- подробное пошаговое описание рабочей операции,
- направления измерений,
- направления движения рукоятки, вибрирующей поверхности и кисти руки оператора,
- условия обхвата,
- поза оператора (с использованием, по возможности, фотографий или видеозаписей);
d) антропометрические данные:
- указание рабочей руки оператора (правая или левая),
- размеры кисти руки оператора (длина, ширина, длина среднего пальца);
e) источник вибрации:
- машина и используемый вставной инструмент,
- технические характеристики машины,
- модель и заводской номер машины,
- срок службы и условия технического обслуживания машины,
- масса ручной машины (обрабатываемого объекта, рычага управления),
- способ удержания машины,
- мощность машины,
- основные частоты вибрации машины,
- тип и модель вставного инструмента,
- объекты обработки;
f) средства измерений:
- состав измерительной системы с подробным описанием ее элементов,
- результаты поверки (калибровки),
- дата последней поверки (калибровки),
- результаты проверки калибровки до и после проведения измерений;
g) условия измерения сил и/или давления:
- описание метода измерений,
- направления измерений,
- способ установки датчиков,
- условия проведения измерений;
h) результаты измерений:
- полученные значения сил и/или давления,
- продолжительность измерений,
- временной сигнал силы и/или давления,
- неопределенность измерения.
Приложение D
(рекомендуемое)
Рекомендуемые характеристики средств измерений
D.1 Средства измерений силы
Следующие рекомендации относятся к средствам измерений толкающей/тянущей силы :
- измерения проводят в направлении действия силы;
- минимальный диапазон измерений: до 200 Н;
- минимальное разрешение: 2% максимального значения диапазона измерений;
- диапазон частот измерений: до 5 Гц;
- толщина датчика не должна превышать 10 мм;
- форма датчика должна быть такой, чтобы он не создавал неудобства оператору в его работе;
- общий вклад других источников неопределенности: менее 10%;
- обеспечение показаний среднего абсолютного значения.
Следующие рекомендации относятся к средствам измерений силы обхвата :
- минимальный диапазон измерений: до 100 Н;
- минимальное разрешение: 2% максимального значения диапазона измерений;
- диапазон частот измерений: до 5 Гц;
- толщина датчика не должна превышать 10 мм;
- форма датчика должна быть такой, чтобы он не создавал неудобства оператору в его работе;
- общий вклад других источников неопределенности: менее 10%;
- обеспечение показаний среднего значения.
Примечание - В некоторых случаях необходимо учитывать влияние температуры на датчик силы.
D.2 Средства измерений локального давления
Следующие рекомендации относятся к средствам измерений локального давления :
- форма датчика должна быть такой, чтобы он не создавал неудобства оператору в его работе;
- размеры области контакта датчика не должны превышать 11x11 мм;
- толщина датчика не должна превышать 2 мм;
- минимальный диапазон измерений: до 0,3 Н/мм;
- минимальное разрешение: 2% максимального значения диапазона измерений;
- расширенная неопределенность: не более 10% (при коэффициенте охвата, равном двум);
- гистерезис: менее 15% максимального значения шкалы при выполнении полного цикла нагрузки и разгрузки (т.е. от нуля до максимального значения шкалы и обратно);
- изменение показания под постоянной нагрузкой на периоде времени 5 мин: не более 10%
- минимальный диапазон частот измерений: до 5 Гц;
- чувствительность к тангенциальным нагрузкам: отклонения не более чем на 10% при приложении тангенциальной нагрузки, составляющей 30% номинальной;
- чувствительность к неравномерной нагрузке на датчик: отклонения не более чем на 30% при сосредоточении нагрузки в области, составляющей 25 процентов общей поверхности контакта датчика.
D.3 Сравнение характеристик средств измерений
Сравнение характеристик средств измерений показано в таблице D.1.
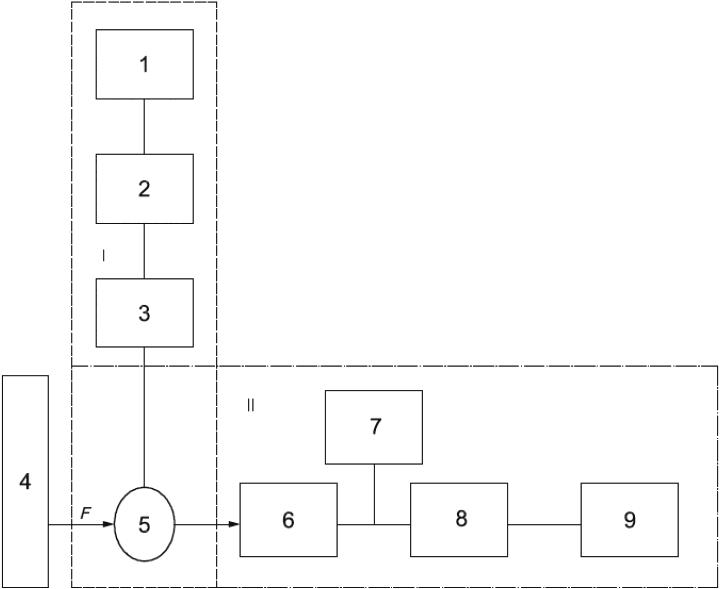
D.4 Примеры измерительной цепи
Схема измерительной цепи с датчиком силы или давления показана на рисунке D.1.
Примечание 1 - Измерения силы могут быть реализованы с применением датчиков силы или давления.
Таблица D.1 - Рекомендуемые характеристики средств измерений
Характеристика | Средства измерений силы для измерений | Средства измерений давления для измерений | |||
Верхняя граница диапазона |
|
|
|
|
|
Разрешение, % |
|
|
|
|
|
Верхняя граница диапазона частот, Гц |
|
|
|
|
|
Неопределенность, % |
|
|
|
|
|
Толщина датчика, мм |
|
|
|
|
|
Пространственное разрешение, мм | - | - | - | - |
|
Гистерезис, % | - | - | - | - |
|
1 - регистрирующее устройство; 2 - показывающее устройство
Рисунок D.1 - Пример схемы измерительной цепи для измерений толкающей/тянущей силы или силы обхвата с датчиками силы или давления
На рисунке D.2 показан вариант измерительной цепи с использованием гидравлической системы.

1 - камера давления; 2 - устройство усреднения (вычисления среднеквадратичного значения); 3 - показывающее устройство; 4 - устройство регистрации; 5 - процессор
Рисунок D.2 - Пример схемы измерительной цепи для измерений толкающей/тянущей силы или силы обхвата с электрогидравлическим датчиком силы
Примечание 2 - Схема измерений силы связи с использованием электрогидравлического датчика силы состоит в следующем. Сила связи, прикладываемая оператором через его ладонь к поверхности вибрирующего инструмента, преобразуется в изменения давления в несжимаемой жидкости (например, масле), которой заполнена камера давления. Эти изменения давления передаются на мембрану датчика давления. Мгновенное значение выходного сигнала этого датчика (напряжения или силы тока) пропорционально изменению давления в камере давления. Сигнал напряжения или силы тока усиливается, измеряется, отображается показывающим устройством и сохраняется. Камера давления и датчик давления вместе составляют двухступенчатый датчик силы.
D.5 Калибровка датчика
Исследования показывают, что в процессе применения некоторые датчики давления изменяют свою чувствительность, поэтому перед применением и после применения таких датчиков необходимо проверять их калибровку.
Приложение Е
(рекомендуемое)
Условия и устройства для калибровки
Е.1 Условия калибровки датчиков силы
Предшествующий опыт применения датчиков силы показал, что в качестве опорного значения статической силы для калибровки удобно выбирать 100 Н. Ввиду многообразия используемых типов датчиков силы целесообразно также проводить калибровку при нагрузке от 80% до 90% максимальной, чтобы подтвердить диапазон линейности датчика. Если датчик предназначен для измерений силы обхвата, то рекомендуется дополнительно выполнять калибровку при статической силе 50 Н. Точка измерений совпадает с геометрическим центром датчика.
Примечание - В ряде случаев важно знать, как изменяется коэффициент чувствительности датчика при изменениях температуры.
Е.2 Условия калибровки датчиков давления
Датчики давления могут быть калиброваны с применением простой установки, включающей в себя гладкую поверхность, на которую устанавливают датчик, и гибкую мембрану, передающую на датчик давление сжатого воздуха, равномерно распределенное по поверхности мембраны. Создаваемое давление должно обеспечивать калибровку датчика в диапазоне до 1 Н/мм. Давление воздуха измеряют манометром с точностью до 0,01 Н/мм
. Создавая разное давление в пределах диапазона измерений строят градуировочную характеристику зависимости напряжения на выходе датчика от приложенного давления.
Е.3 Устройство для калибровки средств измерений силы методом сравнения
Для калибровки используют стандартную рукоятку с встроенным эталонным датчиком силы, показанную на рисунке Е.1. На одной стороне поверхности рукоятки устанавливают преобразователь средства измерений и накрывают его полосой материала, свободные концы которой уравновешивают прилагаемыми силами, например, по 50 Н. Ширина полосы должна соответствовать ширине преобразователя калибруемого средства измерений.
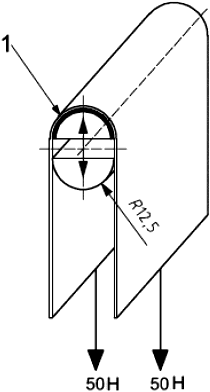
1 - эталонный датчик силы
Рисунок Е.1 - Пример стандартной рукоятки для калибровки средств измерений силы
Е.4 Дополнительная проверка
Датчик силы может быть чувствителен к точке приложения нагрузки. Для проверки наличия или отсутствия такой чувствительности нагрузку прикладывают в трех разных участках датчика: посередине и на половине расстояния от середины датчика к обоим его краям.
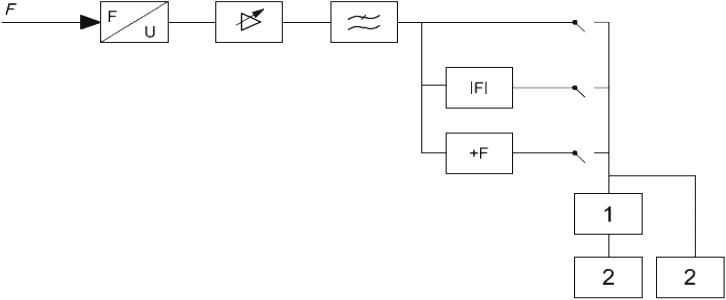
Е.5 Калибровка электрогидравлического устройства измерения силы
Электрогидравлическое устройство измерения силы может быть калибровано с помощью системы, схема которой изображена на рисунке Е.2. Калибровочная система включает в себя источник заданной прилагаемой силы, тензометрический датчик силы и цифровое показывающее устройство. Камера давления калибруемого средства измерений располагается между плоской жесткой поверхностью устройства приложения нагрузки и поверхностью тензометрического датчика силы. Приложенная нагрузка вызывает изменения давления в камере давления. Значения давления, полученные с помощью калибруемого устройства, сравнивают с показаниями калибровочной системы. Нагрузки прилагают во всем диапазоне измерений калибруемого устройства (от нуля до 300 Н), что дает возможность построить градуировочную кривую и проверить линейность характеристики электрогидравлического устройства измерений силы.
I - электрогидравлическое устройство измерения силы; II - калибровочная система; 1 - устройство, показывающее значения давления р; 2 - цифровой манометр; 3 - датчик давления; 4 - источник силы F; 5 - камера давления; 6 - тензометрический датчик силы; 7 - устройство питания; 8 - цифровой индикатор; 9 - устройство, показывающее значения F
Рисунок Е.2 - Пример системы для калибровки электрогидравлического устройства измерений силы
Библиография
[1] ISO 5349 (all parts), Mechanical vibration - Measurement and evaluation of human exposure to hand-transmitted vibration
[2] ISO 8727, Mechanical vibration and shock - Human exposure - Biodynamic coordinate systems
[3] DIN 45679, Mechanische Schwingungen - Messung und Bewertung der Greif- und ![]() zur Beurteilung der Schwingungsbelastung des Hand-Arm-Systems
zur Beurteilung der Schwingungsbelastung des Hand-Arm-Systems
[4] ![]() , L., et al. Auswirkung der
, L., et al. Auswirkung der ![]() zwischen Hand und Handgriff vibrierender
zwischen Hand und Handgriff vibrierender ![]() auf die Schwingungsbelastung und -beanspruchung des Hand-Arm-Systems. Endbericht zum Forschungsvorhaben BMFT/AuT 01 HK 595 8, 1990
auf die Schwingungsbelastung und -beanspruchung des Hand-Arm-Systems. Endbericht zum Forschungsvorhaben BMFT/AuT 01 HK 595 8, 1990
[5] DANTIGNY, F. ![]() de capteurs de pression pour la mesure des forces de
de capteurs de pression pour la mesure des forces de ![]() et de
et de ![]()
![]() sur une
sur une ![]() d'outil. INRS Document de Travail MAV - DT-374/FD, 1998
d'outil. INRS Document de Travail MAV - DT-374/FD, 1998
[6] DANTIGNY, F. Mesures des forces de ![]() et de
et de ![]()
![]() sur une
sur une ![]() d'outil. INRS Document de Travail MAV - DT-375/FD, 1998
d'outil. INRS Document de Travail MAV - DT-375/FD, 1998
[7] DONG, R.G., WELCOME, D.W., and WU, J.Z. Estimation of the biodynamic force acting at the interface between hand and vibrating surface. Ind. Health 43, pp. 516-526
[8] DONG, R.G., WU, J.Z., MCDOWELL, T.W., WELCOME, D.E., SCHOPPER, A.W. Distribution of mechanical impedance at the fingers and the palm of human hand. Journal of Biomechanics 38, (5), pp. 1165-1175.
[9] DUPUIS, H., SCHEFFER, M. Wirkung von Greif- und Andruckkraft unter Schwingungsbelastung - Teilprojekt II. Forschungsbericht Hand-Arm-Schwingungen III, Schriftenreihe des Hauptverbandes der gewerblichen Berufsgenossenschaften, Sankt Augustin, 1992
[10] EDGREN, C.S., REDWIN, R.G., IRWIN, C.B. (2004). Gripping force vectors for varying handle diameters and hand sizes. HUM FACTORS 46 (2), pp. 244-251
[11] HARAZIN, В., SZLAPA, P. Measurement of coupling forces applied to vibration tools in industry. Proceeding of the 34th Meeting of the UK Group of Human Response to Vibration, Dunton, Essex, England, 1999, pp. 111-117
[12] KAULBARS, U. Measurement and evaluation of coupling forces when using hand-held power tools. Central European Journal of Public Health, No. 1, vol. 4 (JHEMI vol. 40), 1996, pp. 57-58
[13] MARCOTTE, P., ALDIEN, Y., BOILEAU, Р.-., RAKHEJA, S., BOUTIN, J. Effect of handle size and handhandle contact force on the biodynamic response of the hand-arm system under zh-axis vibration. Journal of Sound and Vibration, 283 (3), 2005, pp. 1071-1092
[14] RIEDEL, S. Consideration of grip and push forces for the assessment of vibration exposure. Central European Journal of Public Health, vol. 3 (JHEMI vol. 39), 1995, pp. 139-141
[15] WASSERMAN, J., LOGSTON, D. and WASSERMAN, D. The use of a resistive pressure sensor to assess glove effects on tool transmitted vibration. Proceeding of the 10th International Conference on Hand-Arm Vibration, Las Vegas, USA
[16] WELCOME, D.E., RAKHEJA, S., DONG, R.G., WU, J.Z., SCHOPPER, A.W. Relationship between the grip, push and contact forces between the hand and a tool handle. International Journal of Industrial Ergonomics 34 (6), 2004, pp. 507-518
УДК 534.322.3.08:006.354 | ОКС 13.160 |
Ключевые слова: локальная вибрация, область контакта, сила нажатия, сила охвата, сила подачи, измерения | |
Электронный текст документа
и сверен по:
, 2015
