ГОСТ ИСО 5347-1-96
Группа Т88.2
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
КАЛИБРОВКА ДАТЧИКОВ ВИБРАЦИИ И УДАРА
Часть 1. Первичная вибрационная калибровка методами лазерной интерферометрии
Vibration. Calibration of vibration and shock pick-ups. Part 1. Primary vibration calibration by laser interferometry
ОКС 17.160
ОКСТУ 0008
Дата введения 1997-07-01
Предисловие
1 РАЗРАБОТАН Техническим комитетом по стандартизации ТК 183
ВНЕСЕН Госстандартом России
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол N 9-96 от 12 апреля 1996 г.)
За принятие проголосовали:
Наименование государства | Наименование национального органа по стандартизации |
Республика Белоруссия | Белстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Республика Молдова | Молдовастандарт |
Российская Федерация | Госстандарт России |
Республика Таджикистан | Таджикский государственный центр по стандартизации, метрологии и сертификации |
Туркменистан | Главгосинспекция Туркменистана |
Украина | Госстандарт Украины |
3 Настоящий стандарт представляет собой полный аутентичный текст международного стандарта ИСО 5347-1-87 "Вибрация. Калибровка датчиков вибрации и удара. Часть 1. Первичная вибрационная калибровка методами лазерной интерферометрии"
4 ВВЕДЕН ВПЕРВЫЕ
5 Постановлением Государственного комитета Российской Федерации по стандартизации, метрологии и сертификации от 17 марта 1997 г. N 98 межгосударственный стандарт ГОСТ ИСО 5347-1-96 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 июля 1997 г.
Введение
Настоящий стандарт распространяется на линейные акселерометрические датчики, главным образом пьезоэлектрического типа (далее - акселерометры), и устанавливает методы первичной калибровки акселерометров с помощью лазерной интерферометрии и технические характеристики используемой при этом аппаратуры.
Курсивом выделены примечания, позволяющие использовать стандарт в расширенных амплитудном и частотном диапазонах.
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт устанавливает методы калибровки акселерометров, а в случае их использования в областях, попадающих в сферу государственного метрологического контроля и надзора, - методы поверки в диапазоне частот 20-5000 Гц и диапазоне амплитуд ускорения 10-1000 м/с (в зависимости от частоты).
Допускаемая погрешность калибровки:
±0,5% на опорной частоте (160 или 80 Гц), опорной амплитуде (100 или 10 м/с) и опорной настройке усилителя;
±1% для частот до 1000 Гц включительно;
±2% для частот свыше 1000 Гц.
Примечание - Методы калибровки и технические характеристики применяемой аппаратуры, устанавливаемые стандартом, могут быть использованы в диапазонах частот и амплитуд ускорения, выходящих за рамки указанных. При этом погрешность калибровки, рассчитываемая по формулам, приведенным в приложении А, может иметь другие, нежели указанные, числовые значения.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использована ссылка на
МИ 2060-90 ГСИ. Государственная поверочная схема для средств измерений длины в диапазоне 1·10 - 50 м и длин волн в диапазоне 0,2 - 50 мкм.
3 АППАРАТУРА
3.1 Аппаратуру следует использовать при окружающих условиях, соответствующих требованиям, указанным в разделе 4.
3.2 Генератор частоты и индикатор, имеющие следующие характеристики:
- допускаемую погрешность по частоте - ±0,01% показания;
- нестабильность частоты - не менее ±0,01% показания за время измерения;
- нестабильность амплитуды - не менее ±0,01% показания за время измерения.
3.3 Комплекс, состоящий из усилителя мощности и вибратора, имеющий следующие характеристики:
- суммарный коэффициент нелинейных искажений - не более 2%;
- поперечное ускорение, ускорение от изгиба акселерометра и ускорение от качания акселерометра должны быть, по возможности, минимальными и не превышать (в сумме) 10% значения ускорения в основном направлении (в частотном диапазоне свыше 1000 Гц допускается 20%);
- шум - не менее чем на 70 дБ ниже выходного сигнала;
- нестабильность амплитуды ускорения - не более 0,05% показания за время измерения.
Поверхность, к которой крепят акселерометр, не должна вызывать его деформации.
3.4 Сейсмический блок вибратора и лазерного интерферометра (единый блок) должен иметь массу, по крайней мере, в 2000 раз больше суммарной массы движущегося элемента вибратора, крепления и акселерометра.
Сейсмический блок должен быть вывешен на слабодемпфированных пружинах, если вибрация пола оказывает заметное влияние на работу интерферометра или акселерометра; резонансная частота сейсмического блока с пружинами в вертикальном и горизонтальном направлениях должна находиться в пределах 1-2 Гц.
Примечание - Допускаются другие соотношения между массами, если приняты специальные меры, помимо указанных, направленные на демпфирование блока вибратора и лазерного интерферометра.
3.5 Лазер гелий-неонового типа; в лабораторных условиях (давление воздуха 100 кПа, температура 23 °С и относительная влажность 50%); длина волны 0,6328 мкм.
Если лазер имеет устройство ручной или автоматической атмосферной компенсации, оно может быть выключено.
Примечание - Одночастотный стабилизированный лазер должен быть калиброван по длине волны в соответствии с МИ 2060.
3.6 Интерферометр типа Майкельсона с фотодетектором для детектирования интерференционной картины; частотный диапазон 0-15 МГц.
Примечание - Допускается применение модифицированного интерферометра Майкельсона, а также интерферометров с другими интерференционными схемами, в частности использующими трехгранные уголковые отражатели.
3.7 Счетчиковая аппаратура (метод 1, частотный диапазон 20-800 Гц), имеющая следующие характеристики:
- диапазон частот - 10 Гц - 20 МГц;
- допускаемая погрешность - ±0,01% показания.
Наряду со счетчиком импульсов может быть использован счетчик отношения с аналогичной погрешностью.
3.8 Перестраиваемый полосовой фильтр или спектроанализатор (метод 2, частотный диапазон 1000-5000 Гц), имеющие следующие характеристики:
- диапазон частот - 100-10000 Гц;
- ширина полосы - менее 12% центральной частоты;
- наклон - не менее 24 дБ на октаву;
- отношение сигнал/шум - не менее чем на 70 дБ ниже максимального сигнала;
- динамический диапазон - не менее 60 дБ.
3.9 Аппаратура для детектирования нуля (метод 2 - в случае, если не используется спектроанализатор); диапазон частот 30-5000 Гц. Диапазон частот должен быть достаточным для детектирования шума выходного сигнала полосового фильтра.
3.10 Аппаратура для измерения истинного среднего квадратического значения выходного сигнала акселерометра, имеющая следующие характеристики:
- диапазон частот - 20-5000 Гц;
- допускаемая погрешность - ±0,01% показания; при частотах ниже 40 Гц - 0,1% показания.
Для получения значения амплитуды напряжения его среднее квадратическое значение должно быть умножено на .
3.11 Аппаратура для измерения нелинейных искажений в диапазоне 0-5%, имеющая следующие характеристики:
- диапазон частот - 5 Гц - 10 кГц;
- допускаемая погрешность - ±10% показания.
3.12 Осциллограф (является необязательным) для контроля формы кривой сигнала акселерометра, имеющий диапазон частот 5-5000 Гц.
3.13 Другие требования
Для достижения погрешности калибровки 0,5% акселерометр и усилитель акселерометра следует рассматривать как одно целое и калибровать совместно.
Конструкция акселерометра должна быть жесткой. Порог чувствительности акселерометра к механическим напряжениям корпуса должен быть менее 0,2·10 м/с
; поперечная чувствительность акселерометра должна быть не более 1%; нестабильность чувствительности акселерометра совместно с усилителем должна быть не более 0,2% показания в течение года.
4 ОКРУЖАЮЩИЕ УСЛОВИЯ
Калибровку следует проводить при окружающих условиях:
- температура воздуха - (23±3) °С;
- атмосферное давление - (100±5) кПа;
- относительная влажность воздуха - (50±25)%.
5 ПРЕДПОЧТИТЕЛЬНЫЕ ЗНАЧЕНИЯ АМПЛИТУД И ЧАСТОТ
Шесть значений амплитуд ускорения и шесть значений частоты должны быть выбраны из следующих рядов:
Ускорение (только для метода 1):
10-20-50-100-250-500 м/с.
Опорное ускорение - 100 м/с (или 10 м/с
).
Частота:
20-40-80-160-315-630-1250-2500-5000 Гц.
Опорная частота - 160 Гц (или 80 Гц).
6 МЕТОД 1 (МЕТОД СЧЕТА ИНТЕРФЕРЕНЦИОННЫХ ПОЛОС) ДЛЯ ДИАПАЗОНА ЧАСТОТ 20-800 Гц
6.1 Процедура
После надлежащей настройки интерференционного устройства определяют опорный коэффициент преобразования на предпочтительной частоте 160 Гц (или 80 Гц), при предпочтительном ускорении 100 м/с (или 10 м/с
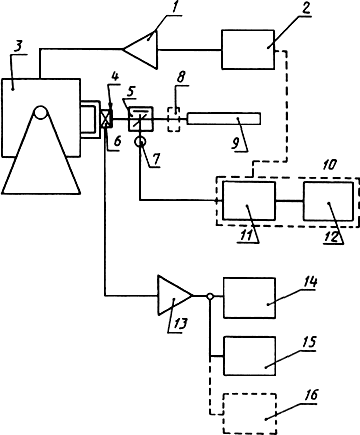
) и стандартном положении переключателя диапазонов усилителя путем измерения частоты полос с помощью счетчика полос (3.7) [используют метод счета интерференционных полос в соответствии с рисунком 1] либо путем измерения отношения частот вибрации и интерференционных полос с помощью счетчика отношения (3.7). Затем определяют коэффициент преобразования при других значениях ускорений и частот. Результаты должны быть выражены как отклонение в процентах от опорного коэффициента преобразования.

1 - вибратор; 2 - усилитель мощности; 3 - генератор частоты и индикатор; 4 - плоское зеркало; 5 - интерферометр; 6 - акселерометр; 7 - фотодетектор; 8 - оптический фильтр; 9 - лазер; 10 - только для счета отношения; 11 - счетчик (или счетчик отношения); 12 - усилитель; 13 - вольтметр; 14 - измеритель нелинейных искажений; 15 - осциллограф
Рисунок 1 - Измерительная система для метода счета интерференционных полос (метод 1)
Для каждой пары ускорения и частоты должны быть измерены нелинейные искажения, поперечное ускорение, ускорения от изгиба и от качания акселерометра, шум, значения которых должны быть в пределах, указанных в 3.3.
6.2 Представление результатов (см. также Б.1 приложения Б)
По результатам измерения частоты интерференционных полос вычисляют амплитуду ускорения акселерометра, м/с
, по формуле
![]()
и коэффициент преобразования по формуле
![]() ,
,
где - амплитуда выходного сигнала акселерометра, В;
- частота вибратора, Гц;
- число периодов (интерференционных полос) за период времени, намного больший периода вибрации, - число периодов, деленное на время, т.е. частота полос, Гц.
Если используют счетчик отношения, амплитуду ускорения , м/с
, вычисляют по формуле
![]() ,
,
а коэффициент преобразования - по формуле
![]() ,
,
где - отношение частоты полос к частоте вибрации, измеренное за период времени, по крайней мере в 100 раз больший, чем период вибрации.
Значение коэффициента преобразования следует сопровождать указанием погрешности калибровки и доверительным уровнем, которые вычисляют в соответствии с приложением А.
Должен быть использован доверительный уровень 99% (или 95%).
7 МЕТОД 2 (МЕТОД МИНИМУМОВ) ДЛЯ ДИАПАЗОНА ЧАСТОТ 800-5000 Гц
7.1 Процедура
С помощью полосового фильтра с центральной частотой, равной частоте сигнала акселерометра, фильтруется сигнал фотодетектора. Этот отфильтрованный сигнал имеет ряд минимумов, соответствующих определенным амплитудам перемещения акселерометра и приведенных в таблице 1.
Таблица 1 - Амплитуды перемещения для минимумов
Номер минимума | Амплитуда перемещения |
0 | 0,0000 |
1 | 0,1930 |
2 | 0,3533 |
3 | 0,5123 |
4 | 0,6709 |
5 | 0,8294 |
6 | 0,9878 |
7 | 1,1461 |
8 | 1,3044 |
9 | 1,4627 |
10 | 1,6210 |
11 | 1,7792 |
12 | 1,9375 |
13 | 2,0957 |
14 | 2,2539 |
15 | 2,4122 |
16 | 2,5704 |
17 | 2,7286 |
18 | 2,8868 |
19 | 3,0450 |
20 | 3,2030 |
21 | 3,3615 |
22 | 3,5197 |
23 | 3,6779 |
24 | 3,8361 |
25 | 3,9943 |
26 | 4,1525 |
27 | 4,3107 |
28 | 4,4689 |
29 | 4,6271 |
30 | 4,7853 |
После установки частоты амплитуду вибратора регулируют, начиная с нулевого значения до достижения максимума отфильтрованного сигнала фотодетектора и далее до его минимального значения. Это минимальное значение - первый минимум отфильтрованного сигнала - соответствует амплитуде перемещения 0,193 мкм. Амплитуды перемещения для других минимумов указаны в таблице 1. Измерительная система для метода минимумов изображена на рисунке 2.
1 - усилитель мощности; 2 - генератор частоты и индикатор; 3 - вибратор; 4 - плоское зеркало; 5 - интерферометр; 6 - акселерометр; 7 - фотодетектор; 8 - оптический фильтр; 9 - лазер; 10 - частотный анализатор; 11 - полосовой фильтр, настроенный на частоту вибратора; 12 - вольтметр; 13 - усилитель; 14 - вольтметр; 15 - измеритель нелинейных искажений; 16 - осциллограф
Рисунок 2 - Измерительная система для метода минимумов (метод 2)
7.2 Представление результатов (см. также Б.1 приложения Б)
Амплитуду ускорения , м/с
, вычисляют по формуле
![]() ,
,
а коэффициент преобразования - по формуле
![]() ,
,
где - амплитуда выходного сигнала акселерометра, В;
- амплитуда перемещения для минимума в соответствии с таблицей 1, мкм;
- частота вибратора, Гц.
Полученные этим методом коэффициенты преобразования используют для расчета отклонений от опорного коэффициента преобразования, полученного на частоте 160 Гц (80 Гц) и при ускорении 100 м/с (10 м/с
) методом 1 (см. раздел 6).
Значение коэффициента преобразования следует сопровождать указанием погрешности калибровки и доверительным уровнем, которые вычисляют в соответствии с приложением А.
Должен быть использован доверительный уровень 99% (или 95%).
ПРИЛОЖЕНИЕ А
(обязательное)
РАСЧЕТ НЕОПРЕДЕЛЕННОСТИ
А.1 Расчет общей (суммарной) неопределенности
Общую (суммарную) неопределенность калибровки для установленного доверительного уровня (для настоящего стандарта
99 или 95%)
рассчитывают по формуле
![]() ,
,
где - случайная неопределенность;
- систематическая неопределенность.
Случайную неопределенность для установленного доверительного уровня ![]() рассчитывают по формуле
рассчитывают по формуле
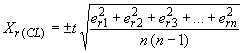 ,
,
где ![]() - дисперсия (отклонение) от среднего арифметического значения результатов единичных измерений в серии измерений;
- дисперсия (отклонение) от среднего арифметического значения результатов единичных измерений в серии измерений;
- число измерений;
- коэффициент распределения Стьюдента, соответствующий установленному доверительному уровню и числу измерений.
Систематическая погрешность должна быть исключена или компенсирована. Остаточную неопределенность ![]() рассчитывают по формуле
рассчитывают по формуле
![]() ,
,
где 2,0 для доверительного уровня 95% (
95%) или
2,6 для доверительного уровня 99% (
99%);
- абсолютная погрешность коэффициента преобразования при фиксированных частотах, амплитудах и положениях переключателей усилителя, В·с
/м (см. А.2).
А.2 Расчет абсолютной погрешности коэффициента преобразования при фиксированных частотах, амплитудах и положениях переключателей усилителя
А.2.1 Расчет для метода 1
Абсолютную погрешность коэффициента преобразования при фиксированных частотах, амплитудах и положениях переключателей усилителя рассчитывают по формуле
а при использовании счетчика отношения - по формуле
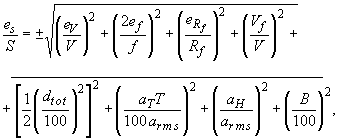
где - коэффициент преобразования, В·с
/м;
- амплитуда выходного сигнала акселерометра, В;
- абсолютная погрешность вольтметра акселерометра, В;
- частота вибратора, Гц;
- абсолютная погрешность частоты вибратора, Гц;
- частота полос, Гц;
- абсолютная погрешность частоты интерференционных полос, Гц;
- абсолютная погрешность детектирования интерференционной полосы, которая представляет собой изменение выходного напряжения акселерометра, соответствующее единице последнего используемого разряда счетчика частоты интерференционных полос, В;
- суммарное искажение, равное
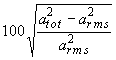 , %,
, %,
где - истинное среднее квадратическое значение суммарного ускорения, м/с
;
- истинное среднее квадратическое значение ускорения при возбуждающей частоте, м/с
;
- сумма поперечного ускорения, ускорения от изгиба акселерометра и ускорения от качания акселерометра, м/с
;
- наибольшее значение поперечной чувствительности акселерометра, % к амплитуде ускорения в направлении измерения;
- ускорение, вызываемое шумом, м/с
;
- погрешность длины волны лазера и интерферометра, % длины волны;
- отношение частоты вибрации к частоте интерференционных полос, измеренное за время, не меньшее 100 периодов вибрации;
- абсолютная погрешность отношения.
А.2.2 Расчет для метода 2
Абсолютную погрешность коэффициента преобразования , В·с
/м, при фиксированных частотах, амплитудах и положениях переключателей усилителя рассчитывают по формуле
 ,
,
где - коэффициент преобразования, В·с
/м (см. 7.2);
- амплитуда выходного сигнала акселерометра, В;
- абсолютная погрешность вольтметра акселерометра, В;
- разрешающая способность в минимуме, равная изменению выходного сигнала акселерометра, при котором показания вольтметра, используемого для индикации минимума, изменяются от наименьшего значения перед минимумом до наименьшего значения после минимума, В;
- суммарное искажение, равное
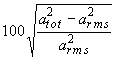 , %,
, %,
где - истинное среднее квадратическое значение суммарного ускорения, м/с
;
- истинное среднее квадратическое значение ускорения при возбуждающей частоте, м/с
;
- сумма поперечного ускорения, ускорения от изгиба акселерометра и ускорения от качания акселерометра, м/с
;
- наибольшее значение поперечной чувствительности акселерометра, % амплитуды ускорения в направлении измерения;
- ускорение, вызываемое шумом, м/с
;
- частота вибратора, Гц (см. 7.2);
- абсолютная погрешность частоты вибратора, Гц.
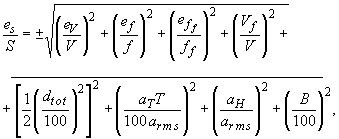
А.3. Расчет общей абсолютной погрешности коэффициента преобразования и неопределенности для полного амплитудного и частотного диапазонов
Абсолютная погрешность коэффициента преобразования , рассчитываемая в соответствии с А.2.1 или А.2.2, имеет место для фиксированных частот, амплитуд и положений переключателей усилителя. Общую погрешность коэффициента преобразования
, В·с
/м, и неопределенность для полного амплитудного и частотного диапазонов рассчитывают по формуле
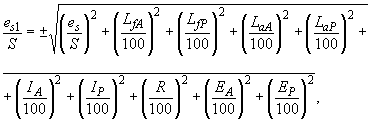
где - коэффициент преобразования, В·с
/м (см. 6.2 или 7.2);
- абсолютная погрешность коэффициента преобразования для опорной частоты, амплитуды и фиксированных положений переключателей усилителя, рассчитанная в соответствии с А.2.1 или А.2.2, В·с
/м;
- отклонение амплитудно-частотной характеристики усилителя, % коэффициента преобразования;
- отклонение амплитудно-частотной характеристики акселерометра, % коэффициента преобразования;
- нелинейность амплитудной характеристики усилителя, % коэффициента преобразования;
- нелинейность амплитудной характеристики акселерометра, % коэффициента преобразования;
- погрешность от нестабильности цепи усилителя и погрешность импеданса источника, % коэффициента преобразования;
- погрешность от нестабильности акселерометра, % коэффициента преобразования;
- погрешность усиления по диапазону усилителя (погрешности усиления для различных настроек усилителя), % коэффициента преобразования;
- погрешность, вызванная воздействием окружающих условий на усилитель, % коэффициента преобразования;
- погрешность, вызванная воздействием окружающих условий на акселерометр, % коэффициента преобразования.
ПРИЛОЖЕНИЕ Б
(обязательное)
ФОРМУЛЫ ДЛЯ РАСЧЕТА УСКОРЕНИЯ
Б.1 Процедура 1
Длина волны главной линии спектра излучения неона принята равной 0,632815 мкм при давлении 100 кПа.
В интерферометре перемещение, соответствующее расстоянию между двумя соседними полосами (максимальной или минимальной интенсивностями),
![]() .
.
Количество максимумов для одного периода вибрации
![]() ,
,
где ![]() .
.
Ускорение ![]() ,
,
где - частота вибратора, Гц;
- частота интерференционных полос, Гц.
Б.2 Процедура 2
Регулируя амплитуду вибрации до уровня, при котором амплитуда составляющей спектра, частота которой равна частоте вибрации, становится равной нулю, амплитуду перемещения и амплитуду ускорения
определяют по следующим формулам:
![]() ;
;![]() ,
,
где - аргументы, соответствующие различным нулям функции Бесселя, приведенные в таблице Б.1.
Таблица Б.1 - Значения для нулей функции Бесселя
Номер нуля | |
1 | 3,83170 |
2 | 7,01559 |
3 | 10,17346 |
4 | 13,32369 |
5 | 16,47063 |
6 | 19,61586 |
7 | 22,76009 |
8 | 25,90368 |
9 | 29,04683 |
10 | 32,18968 |
11 | 35,33230 |
12 | 38,47477 |
13 | 41,61709 |
14 | 44,75932 |
15 | 47,90146 |
16 | 51,04353 |
17 | 54,18556 |
18 | 57,32753 |
19 | 60,46945 |
20 | 63,61136 |
21 | 66,75323 |
22 | 69,89507 |
23 | 73,03690 |
24 | 76,17870 |
25 | 79,32049 |
26 | 82,46227 |
27 | 85,60402 |
28 | 88,75477 |
29 | 91,88752 |
30 | 95,02924 |
Электронный текст документа
и сверен по:
М.: ИПК Издательство стандартов, 1997
