ГОСТ Р 51498-99
(ИСО 10814-96)
Группа Т34
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВИБРАЦИЯ
Подверженность и чувствительность машин к дисбалансу
Mechanical vibration. Susceptibility and sensitivity of machines to unbalance
ОКС 17.160
ОКП 42 7791
Дата введения 2000-07-01
Предисловие
1 РАЗРАБОТАН И ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация и удар"
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 22 декабря 1999 г. N 659-ст
3 Настоящий стандарт, за исключением 4.1, 6.1 и приложения А, представляет собой аутентичный текст ИСО 10814-96 "Вибрация. Подверженность и чувствительность машин к дисбалансу"
4 ВВЕДЕН ВПЕРВЫЕ
Введение
Балансировка ротора, проводимая на стадии изготовления машин (например в соответствии с ГОСТ 22061-76 или ГОСТ ИСО 11342-95), обычно обеспечивает получение приемлемых уровней вибрации машины в процессе ее эксплуатации, если отсутствуют другие источники вибрации помимо дисбаланса. Но есть и исключения, когда машина при вводе в эксплуатацию требует дополнительной балансировки. Более того, в процессе эксплуатации машины время от времени, а то и достаточно часто, может появляться необходимость устранения дисбаланса.
Причиной повышенной вибрации машины при вводе в эксплуатацию может быть неправильно проведенная балансировка ротора или погрешности в его сборке. Но может оказаться и так, что причиной чрезмерной вибрации собранной машины является ее повышенная чувствительность к небольшим остаточным дисбалансам, значения которых укладываются в обычные пределы допусков.
При обнаружении повышенной вибрации первая попытка ее устранения зачастую состоит в проведении балансировки на месте эксплуатации. Если при этом удается устранить вибрацию с помощью относительно небольших корректирующих масс, это свидетельствует о высокой чувствительности машины к дисбалансу. Такое может быть, например, в случаях, когда рабочая скорость машины близка к ее резонансной скорости или если демпфирование колебаний в конструкции машины невелико.
Если машина с высокой чувствительностью к дисбалансу обладает к тому же и повышенной подверженностью к изменению дисбаланса, такая машина может потребовать частого проведения балансировки на месте ее эксплуатации. Причиной изменения дисбаланса могут быть, например износ элементов машины, изменение температуры, массы, жесткости и демпфирующих свойств машины в процессе ее работы.
Если в процессе эксплуатации дисбаланс машины, также как и другие условия ее работы, сохраняется практически неизменными, достаточно проводить только незначительную дополнительную балансировку, совмещаемую с другими ремонтными работами или процедурами технического обслуживания. В противном случае может возникнуть необходимость внесения изменений в конструкцию машины, которые позволят изменить значение ее резонансной частоты, демпфирующие свойства или другие параметры. Таким образом, пользователю необходимо знать, какое значение чувствительности машины к дисбалансу является допустимым.
В настоящем стандарте предполагается, что вибрация на оборотной частоте обусловлена только неуравновешенностью машины. Следует, однако, иметь в виду, что помимо дисбаланса на вибрацию машины, в том числе и на оборотной частоте, влияет множество других факторов, например погрешности изготовления и сборки. Чувствительность машины ко многим из этих погрешностей близка к чувствительности к дисбалансу и может быть удовлетворительно описана с помощью последней, однако рассмотрение всех иных дефектов, помимо дисбаланса, выходит за рамки настоящего стандарта.
Кроме того, чувствительность машины к дисбалансу может изменяться в процессе ее работы. Это зависит от конструктивных особенностей машины, в том числе от свойств ее опоры и фундамента. Эти свойства могут изменяться со временем в результате действия процессов износа и образования трещин. Модальные характеристики некоторых тепловых машин, особенно с подшипниками скольжения, изменяются в зависимости от эксплуатационных параметров (давление и температура пара, температура масла и пр.). Для электрических машин на характер вибрации оказывают влияние другие параметры, например значение силы тока возбуждения. Все эти эффекты, требующие для их выявления применения диагностических процедур, в настоящем стандарте не рассматриваются.
1 Область применения
Настоящий стандарт устанавливает методы определения чувствительности машин к дисбалансу, а также оценки степени близости эксплуатационной скорости машины к ее резонансным скоростям.
В настоящем стандарте приведены рекомендации по применению числовых значений чувствительности в ряде практических случаев.
Настоящий стандарт устанавливает классификацию машин на группы в зависимости от подверженности машин дисбалансу и указывает значения модальной чувствительности к дисбалансу, характерные для машин каждой группы. Эти значения применяют для машин, у которых имеется либо один резонанс в рабочем диапазоне частот, либо несколько резонансов, разнесенных между собой достаточно широко (более чем на 20% частоты резонанса).
Приведенные значения чувствительности не предназначены для использования в качестве условий приемки машин, а служат только для указания того, как избежать, с одной стороны, повышенной виброактивности машины, а с другой - завышенных требований к плавности ее работы. Они могут служить также основанием для проведения более подробных исследований, например в случаях, когда необходимо уточнить значение чувствительности конкретной машины.
Выполнение рекомендаций настоящего стандарта в отношении чувствительности машины к дисбалансу позволяет ожидать, что вибрация машины не превысит установленных пределов. Однако необходимо иметь в виду, что в машине существует много других источников вибрации, которые в настоящем стандарте на рассматриваются.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ Р ИСО 7919-1-99 Вибрация. Контроль состояния машин по результатам измерений вибрации на вращающихся валах. Общие требования
ГОСТ ИСО 10816-1-97 Вибрация. Контроль состояния машин по результатам измерений вибрации на невращающихся частях. Общие требования
ГОСТ ИСО 11342-95 Вибрация. Оценка качества балансировки гибких роторов
ГОСТ 19534-74 Балансировка вращающихся тел. Термины
ГОСТ 22061-76 Машины и техническое оборудование. Система классов точности балансировки. Основные положения
ГОСТ 24346-80 Вибрация. Термины и определения
3 Определения
В настоящем стандарте применяют термины по ГОСТ 19534 и ГОСТ 24346.
Кроме того, в настоящем стандарте применяют следующие термины с соответствующими определениями.
3.1 подверженность дисбалансу: Характеристика, связанная с вероятностью того, что дисбаланс машины претерпит в условиях эксплуатации под воздействием внешних факторов значительные изменения в течение определенного периода времени.
3.2 чувствительность к дисбалансу: Мера вибрационного отклика машины на изменение дисбаланса.
3.2.1 локальная чувствительность : Отношение модуля изменения вектора виброперемещения или виброскорости в заданной плоскости измерений к модулю изменения дисбаланса в заданной плоскости ротора на заданной скорости вращения.
Примечания
1 Локальную чувствительность определяют по формуле
 , (1)
, (1)
где - изменение гармоники вибрации оборотной частоты в плоскости
;
- изменение дисбаланса путем установки пробного груза (или набора грузов) в плоскости
ротора.
2 Локальную чувствительность часто называют коэффициентом влияния. Это размерная величина.
3.2.2 модальная чувствительность : Отношение изменения вектора модального перемещения к изменению модального эксцентриситета (отношение модального дисбаланса к модальной массе).
Примечания
1 Данная величина является безразмерной.
2 На практике при определении модальной чувствительности следует обращать внимание на корректное выделение нужных мод вибрации.
3 В случае возбуждения вибрации вследствие неуравновешенности машины модальную чувствительность для моды определяют по формуле
 , (2)
, (2)
где - скорость вращения ротора, мин
;
- скорость
-го резонанса (в отсутствии демпфирования), мин
;
- коэффициент демпфирования для
-й моды.
Если скорость вращения равна резонансной скорости, то равна
![]() . В случае малого демпфирования эта величина определяет максимальное усиление вибрации на резонансе, называется коэффициентом усиления на резонансе (или добротностью) и обозначается
. В случае малого демпфирования эта величина определяет максимальное усиление вибрации на резонансе, называется коэффициентом усиления на резонансе (или добротностью) и обозначается ; данная величина зависит только от уровня демпфирования в системе.
4 Модальную чувствительность иногда называют коэффициентом усиления вибрации для моды .
4 Классификация машин по степени их подверженности дисбалансу
4.1 Общие положения
В соответствии со степенью подверженности машин того или иного класса к изменению дисбаланса в процессе эксплуатации их относят к одной из групп машин, указанных в 4.2-4.4. При этом предполагается, что машины одного класса будут отнесены по данной классификации к одной группе и для машин данного класса будут установлены допустимые значения чувствительности к дисбалансу согласно разделу 5. Однако необходимо иметь в виду, что изменение дисбаланса машины в процессе ее эксплуатации может быть связано не только с классом машины или выполняемыми ею технологическими операциями, но также и с дефектами изготовления машины, например:
- повышенными зазорами по посадочным местам деталей ротора;
- недостаточными тепловыми зазорами между насадными деталями ротора;
- низкой жаропрочностью, приводящей к остаточным деформациям роторов, работающих в горячей среде, вследствие ползучести;
- температурной нестабильностью материала ротора, приводящей к деформации равномерно нагретого ротора;
- защемлениями, заеданиями и другими дефектами, связанными с тепловыми перемещениями в подвижных соединениях как в роторе, так и в опорной системе;
- тепловой асимметрией охлаждаемых роторов электрических машин.
Данные дефекты могут быть присущи не классу машин в целом, а какому-нибудь конкретному образцу. Поэтому, если известно, что машины одного класса могут различаться по степени их подверженности изменениям дисбаланса в процессе эксплуатации, целесообразно провести дополнительные исследования согласно приложению А, после чего принять решение о возможности эксплуатации машины.
4.2 Группа I. Низкая подверженность
Для машин данной группы характерна низкая вероятность появления значительного изменения дисбаланса в процессе их эксплуатации. Обычно такие машины имеют ротор, масса которого велика по сравнению с массой несущего корпуса, работают в условиях чистой среды, имеют незначительный износ, а изменения формы ротора вследствие изменения температуры минимальные.
Примеры: валы бумагоделательных машин, печатные валы, высокоскоростные вакуумные насосы.
4.3 Группа II. Средняя подверженность
Для машин данной группы характерна средняя вероятность появления значительного изменения дисбаланса в ходе их эксплуатации. Ротор таких машин может быть подвержен значительным перепадам температуры или умеренному износу.
Примеры: насосы, работающие в чистых средах, якорь электрической машины, газовые и паровые турбины, небольшие промышленные турбогенераторы, турбокомпрессоры.
4.4 Группа III. Высокая подверженность
Для машин данной группы характерна высокая вероятность появления значительного изменения дисбаланса в ходе их эксплуатации. К таким машинам относятся: воздуходувки, работающие в среде с осаждающимися частицами, насосы, работающие с грязными жидкостями, роторы, у которых наблюдается высокий износ или работающие в коррозирующей среде.
Примеры: центрифуги, вентиляторы, шнековые конвейеры, молотковые мельницы.
5 Модальная чувствительность
5.1 Классы модальной чувствительности от А до Е
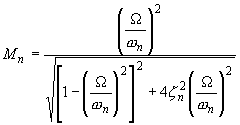
На рисунках 1-3 показано разбиение на классы модальной чувствительности в соответствии с формулой (2) для рабочих скоростей, лежащих в окрестности резонансной скорости машины. Границы диапазонов зависят от того, к какой группе относится машина в соответствии с классификацией по подверженности изменениям дисбаланса (для одного и того же класса чувствительности допустимый коэффициент демпфирования для машин III группы будет ниже, чем для машин I группы).
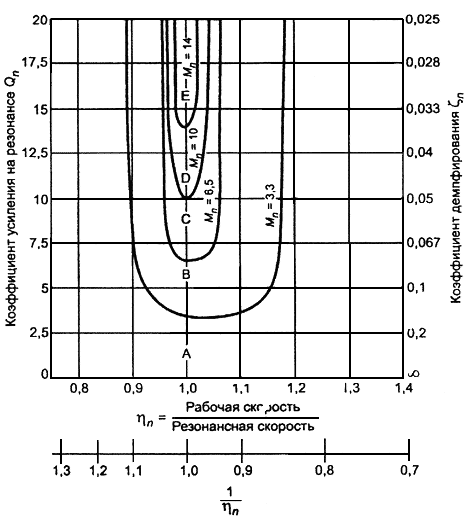
Рисунок 1 - Классы модальной чувствительности от А до Е для машин группы I
Рисунок 2 - Классы модальной чувствительности от А до Е для машин группы II
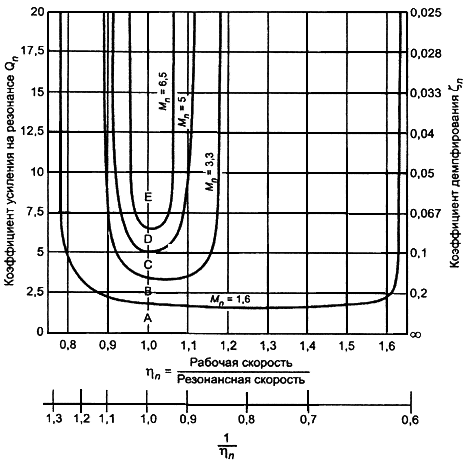
Рисунок 3 - Классы модальной чувствительности от А до Е для машин группы III
Как правило, установленным классам чувствительности соответствуют ожидаемые условия работы машины, как показано в таблице 1.
Таблица 1
Класс модальной чувствительности | Ожидаемые условия работы машины |
А - очень низкая чувствительность | Плавный переход через резонансную скорость; трудно различаемый резонанс |
В - низкая чувствительность | Плавная работа, низкая и стабильная вибрация |
С - средняя чувствительность | Допустимая, умеренная и слегка нестационарная вибрация |
D - высокая чувствительность | Чувствительна к дисбалансу; может потребовать проведения регулярной дополнительной балансировки на месте установки |
Е - очень высокая чувствительность | Слишком чувствительна к дисбалансу; работы в таких условиях следует избегать |
Примеры использования графиков, изображенных на рисунках 1-3, приведены в приложении В.
5.2 Анализ работы машины в соответствии с классом ее модальной чувствительности
5.2.1 Наиболее благоприятным для работы машины является класс А, однако с учетом возможностей реализации данных условий работы машины и ее стоимости может оказаться более целесообразным работать с более высокими значениями модальной чувствительности.
5.2.2 Для машин с высокими рабочими характеристиками (например для тех, которые имеют короткий интервал между циклами планового технического обслуживания) допускается работа с более высокими значениями модальной чувствительности.
5.2.3 Машины, для которых балансировка на месте эксплуатации непрактична и экономически невыгодна, должны иметь более низкие значения модальной чувствительности.
5.2.4 Низкая чувствительность не дает гарантии того, что все части машины будут иметь вибрацию, не превышающую установленные пределы (см. разделы 7 и 8).
5.3 Движение ротора с ускорением
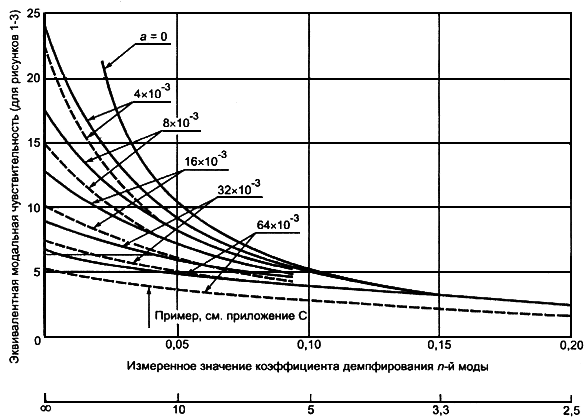
Более высокие значения модальной чувствительности допускаются для машин, которые во время работы быстро проходят области резонансных частот, так что вибрационный отклик конструкции не успевает развиться до высоких значений. Повышенные значения модальной чувствительности могут также быть приемлемы для машин, изменения рабочей скорости которых связаны только с их пуском или остановом, выполняемым достаточно редко.
На рисунке 4 показаны теоретические кривые для колебательных систем с одной степенью свободы, показывающие, как уменьшается модальная чувствительность с ростом ускорения ротора. Однако для наиболее часто встречающихся на практике ускорений этот эффект незначителен и им можно пренебречь.
Измеренное значение чувствительности для постоянной скорости вращения ротора
![]() - ускорение
- ускорение
![]() - замедление
- замедление
![]() =constant;
=constant; - угловое ускорение, с
Рисунок 4 - Уменьшение модальной чувствительности с изменением
коэффициента демпфирования и ускорением ротора
Эффект уменьшения значения модальной чувствительности при движении с ускорением следует оценить до того, как обращаться к рисункам 1-3 (кривые на этих рисунках применимы только для роторов, движущихся с небольшим ускорением), с учетом следующих моментов:
а) предполагается, что машина проходит область резонанса с постоянным ускорением движения ротора;
б) модальную чувствительность оценивают (по возможности) при стационарном режиме работы машины как можно ближе к значению резонансной скорости;
в) при быстром ускорении или замедлении вращения ротора максимальная вибрация будет в тот момент, когда скорость вращения отличается от резонансной скорости вследствие задержки в отклике вибрации.
6 Экспериментальное определение модальной чувствительности
6.1 Общие положения
Для определения модальной чувствительности необходимо получение информации о том, как изменяется вибрация на оборотной частоте в процессе изменения этой частоты. Обычно для этого проводят измерения вибрации на оборотной частоте в процессе разгона и выбега. Если при измерениях получают значения амплитуды и фазы вибрации оборотной частоты, то это позволяет построить амплитудно-фазочастотную характеристику (диаграмму Найквиста) и определить параметры демпфирования, как указано в 6.2. Если при измерениях получают значения только амплитуды вибрации, то это позволяет построить амплитудно-частотную характеристику (диаграмма Боде) и использовать процедуру, описанную в 6.3.
Примечание - Существуют и другие способы определения характеристик демпфирования конструкции, например в результате аппроксимации полученной кривой амплитудно-фазочастотной характеристики полиномом, в который в явном виде входят коэффициенты модального демпфирования. При этом возможно получение оценок даже в случае, если измерения проводились только в дорезонансной области и не захватывали резонанс. Однако если подъем характеристики у верхней границы диапазона измерений был обусловлен наличием не одного, а двух или более близко расположенных резонансов, оценка модального демпфирования может быть получена с большей погрешностью.
6.2 Построение диаграммы Найквиста
На резонансных скоростях чувствительность к дисбалансу сильно зависит от значения демпфирования. Поскольку само демпфирование может зависеть от различных факторов, рекомендуется, чтобы определение чувствительности проводилось в режиме работы машины, максимально приближенном к нормальному рабочему режиму (например по температуре).
Во многих случаях вибрация на скорости, близкой к резонансной, проявляется преимущественно в виде соответствующей моды колебаний, так что ее можно представить в виде отклика эквивалентной системы с одной степенью свободы. При этом характеристики демпфирования и резонансная частота изгибных колебаний могут быть получены посредством измерений во время медленного разгона или выбега машины (с небольшим ускорением).
Система с одной степенью свободы описывает -ю моду вибрации; при этом справедливо следующее соотношение
![]() , (3)
, (3)
где - максимальная модальная чувствительность, равная
при скорости ротора, равной резонансной скорости (
![]() );
);
(или
) - скорость, при которой фаза колебаний сдвинута относительно колебаний на резонансной скорости на ±45°, мин
.
Пример построения диаграммы приведен в приложении С.
В некоторых случаях форма кривой диаграммы Найквиста может значительно отличаться от окружности вследствие того, что в системе присутствуют несколько близко расположенных друг от друга резонансов. В этом случае оценку модальной чувствительности можно получить, устанавливая на ротор набор пробных грузов, подобранных таким образом, чтобы возбудить требуемую моду вибрации. Процедура построения диаграммы Найквиста в этом случае применяется не к вектору вибрации, а к вектору разности между исходной вибрацией и той, что получена после размещения набора пробных грузов.
Для построения диаграммы Найквиста можно использовать сигналы вибрации оборотной частоты с любых датчиков, кроме тех, что расположены вблизи узлов мод изгибных колебаний, однако данные с датчиков, установленных в местах пучностей, позволят получить более точные результаты.
6.3 Построение диаграммы Боде
При отсутствии информации о фазе колебаний, т.е. когда имеется только зависимость амплитуды перемещения на оборотной частоте от скорости вращения ротора, коэффициент усиления вибрации можно определить с помощью диаграммы, показанной на рисунке 5, по формуле
![]() , (4)
, (4)
где - скорость вращения ротора, соответствующая максимальной амплитуде вибрации
;
и
- значения скорости, соответствующие уровню 0,707 максимального значения на резонансе.
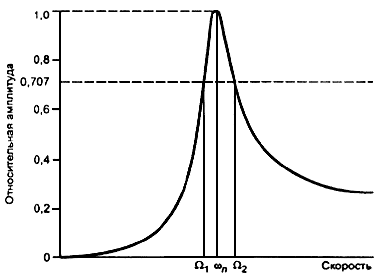
Рисунок 5 - Диаграмма Боде для оценки модальной чувствительности
Ограничения по точности для данного метода могут быть связаны с малым демпфированием в системе, искажением формы резонансной кривой вследствие влияния соседних мод и другими факторами. Если влияние таких факторов существенно, следует обратиться к методу пробных грузов, описанному в 6.2.
На точность определения модальной чувствительности могут повлиять также скорость передачи данных измерительной аппаратурой и ограниченность числа точек в выборке данных.
7 Локальная чувствительность
Во многих случаях (например для роторов с развитой консольной частью, роторов с ограниченным зазором в некоторых сечениях, роторов с рабочей скоростью, близкой к резонансу) интерес может представлять локальная чувствительность (коэффициент влияния) для разных скоростей в пределах рабочего диапазона, включая резонансные скорости машины.
Значение локальной чувствительности, измеренное для данной машины, зависит, помимо прочего, от расположения плоскости измерений и положения пробного груза вдоль оси ротора. Этим локальная чувствительность отличается от модальной чувствительности, которая на определенной скорости вращения имеет единственное значение.
Обычно определять локальную чувствительность необходимо только в тех измерительных точках, для которых при заданной скорости вращения существуют ограничения амплитуды вибрации. Поэтому измеренную чувствительность в некоторой точке и для некоторой скорости следует оценивать, сравнивая ее с отношением допустимой амплитуды к допустимому дисбалансу.
Примечание - Значения допустимого дисбаланса и допустимой амплитуды могут быть определены по ГОСТ ИСО 11342, ГОСТ ИСО 10816-1 (см. также ГОСТ Р ИСО 7919-1). Значения допустимого дисбаланса и допустимой амплитуды могут быть установлены также в результате соглашения между изготовителем машины и потребителем.
В зависимости от эксплуатационных параметров машины (рабочей скорости, ее отношения к резонансной скорости и т.д.) может оказаться целесообразным ограничить максимальную допускаемую локальную чувствительность, введя в вышеуказанное отношение некоторый множитель меньше единицы.
Для режимов разгона и выбега машины допускаются, как правило, значения вибрации более высокие, чем для рабочей скорости. Поэтому для скоростей, отличных от рабочей, можно считать приемлемыми более высокие значения локальной чувствительности, если при этом вибрация не превышает установленных предельных значений.
8 Экспериментальное определение локальной чувствительности
При измерениях локальной чувствительности выбор плоскостей установки грузов выбирается из соображений удобства доступа, а также из условия получения при установке пробных грузов максимального отклика вибрации для заданных мод и заданных скоростей.
Определение локальной чувствительности проводят следующим образом.
8.1 Подготовить машину к работе в нормальном режиме.
8.2 Установить скорость работы , на которой должны быть проведены измерения. Обычно выбирают скорость в диапазоне рабочих скоростей, максимально близкую к резонансной скорости. Подождать, пока вибрация машины и другие параметры ее работы достигнут установившихся значений, после чего измерить вибрацию на оборотной частоте в заданных плоскостях. В процессе измерений следует, по возможности, поддерживать постоянными скорость, нагрузку и другие параметры, которые могут оказать влияние на вибрацию машины.
8.3 Добавить одиночный пробный груз, создающий дисбаланс , в заданную
-ю плоскость коррекции. Масса груза должна быть достаточно большой, чтобы вызвать значительное изменение вибрации по сравнению с измеренной по 8.2, но не настолько большой, чтобы вызвать появление опасных вибраций машины в процессе испытаний. Иногда вместо одиночного груза допускается устанавливать набор грузов.
8.4 Измерить вибрацию в условиях, аналогичных указанным в 8.2.
8.5 Для каждой измерительной плоскости вычислить векторную разность между величинами, измеренными согласно 8.2 и 8.4. Локальный дисбаланс
определяют в результате деления
на изменение дисбаланса
 . (5)
. (5)
определено для той скорости работы машины, на которой проводились измерения.
При проведении измерений следует учитывать такие факторы, как диапазон линейности вибрации и повторяемость результатов измерений.
9 Анализ чувствительности машины к дисбалансу
Если в получении необходимых экспериментальных данных имеются трудности, целесообразно провести численный анализ для тех машин, которые в процессе разгона или в установившемся режиме работы проходят через резонансные частоты или близко подходят к ним.
Такой анализ требует использования математических моделей с включением следующих данных:
а) массо-жесткостных характеристик ротора и его опоры;
б) жесткости и коэффициента демпфирования подшипников и уплотнений, являющихся функциями скорости вращения;
в) значений собственных частот и соответствующих форм мод колебаний;
г) расчетных значений модального демпфирования;
д) расчетных значений локальной чувствительности для заданных точек вдоль оси ротора и заданных плоскостей дисбаланса.
При расчетах для соответствующей моды вибрации дисбаланс должен быть отнесен к соответствующей плоскости. Так для расчетов первой моды он должен быть отнесен к точке вблизи середины пролета ротора, а для второй моды - к точкам вблизи концов ротора, колеблющимся в противофазе.
ПРИЛОЖЕНИЕ А
(рекомендуемое)
Оценка степени подверженности машин изменениям дисбаланса
в процессе их эксплуатации
Подверженность машин изменениям дисбаланса следует оценивать по изменениям вибрации оборотной частоты:
- в процессе пуска, нагружения машины и тепловой стабилизации (для разных машин это составляет период от нескольких минут до нескольких суток);
- в процессе заданного периода эксплуатации, составляющего, например, половину периода между капитальными ремонтами (для разных машин длительность этого периода будет составлять от нескольких дней до нескольких лет).
Изменение вибрации, определенное как разность соответствующих комплексных значений, отнесенное к некоторому предельному значению, служит мерой подверженности машины изменению дисбаланса. При этом необходимо быть уверенным в том, что наблюдаемые изменения вибрации не были вызваны какими-либо другими факторами, кроме изменения дисбаланса.
При необходимости получения оценки подверженности изменениям дисбаланса конкретного типа машин упомянутые испытания следует проводить, по крайней мере, на 10 образцах машин данного типа.
ПРИЛОЖЕНИЕ В
(справочное)
Примеры классификации по значениям модальной чувствительности
В.1 Пример 1
Машина - газовая турбина (группа II).
Рабочая скорость - 3000 мин, постоянная.
Первая резонансная скорость - 2730 мин.
Нечастые и небольшие по величине ускорения.
Коэффициент демпфирования (полученный экспериментально на месте установки) - =0,04.
Примечание - Поскольку резонансная скорость очень близка к рабочей скорости машины, для измерения коэффициента демпфирования было использовано значение =12,5 на резонансе.
В данном примере =3000/2730=1,1.
Согласно рисунку 2 машина относится к диапазону С (средняя чувствительность).
В.2 Пример 2
Та же машина, но рабочая скорость ее изменяется со временем до 3000 мин.
Поскольку в данном случае диапазон рабочих скоростей включает резонансную скорость, =1,0.
Согласно рисунку 2 машина относится к диапазону Е (очень высокая чувствительность).
В.3 Пример 3
Та же машина; время, необходимое для ускорения ротора от 1000 мин до 30000 мин
,
=1,161 с.
Угловое ускорение определяется по формуле
![]() с
с.
Затем определяется значение коэффициента (см. рисунок 4):
 .
.
Экспериментально полученное значение коэффициента демпфирования =0,04 (это значение получено при постоянной скорости вращения, равной резонансной скорости вращения, или при прохождении резонансной скорости с малым ускорением).
Согласно рисунку 4 эквивалентная модальная чувствительность =6,3 (эквивалентный коэффициент демпфирования
=0,08).
Поскольку в данном примере внимание сосредоточено только на прохождении резонансной скорости изгибных колебаний, =1,0.
Согласно рисунку 2 при таком типе прохождения резонанса машина относится к диапазону С (средняя чувствительность).
ПРИЛОЖЕНИЕ С
(справочное)
Пример построения диаграммы Найквиста
Результаты измерений, проведенных на разных скоростях, приведены на диаграмме Найквиста (рисунок С.1) и в таблице С.1.
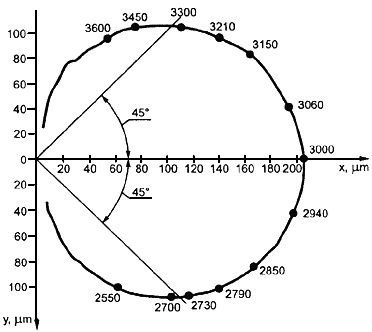
Рисунок С.1 - Диаграмма Найквиста, показывающая изменение амплитуды
и фазы вибрации при прохождении через резонансную скорость
Анализ измерений показывает, что значение первой резонансной скорости равно 3000 мин
, а скорость, на которой фазовый угол изменяется на 45° - 2710 мин
. В соответствии с формулой (3) можно рассчитать значение коэффициента усиления
.
Таблица С.1
|
| |
3000 | 2710 | 4,91 |
Если первая и вторая резонансные скорости расположены близко друг к другу или при наложении колебаний от других резонансов, для оценки модальных параметров потребуются более сложные методы анализа.
Текст документа сверен по:
М.: ИПК Издательство стандартов, 2000
