
БЗ 8—88/577

ГОСУДАРСТВЕННЫЙ СТАНДАРТ
СОЮЗА ССР
СТАНКИ МЕТАЛЛОРЕЖУЩИЕ
МЕТОДЫ ПРОВЕРКИ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ
ГОСТ 27843—88 (СТ СЭВ 6052—87)
Издание официальное
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
Москва
УДК 621.9:006.354 Группа Г81
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
СТАНКИ МЕТАЛЛОРЕЖУЩИЕ
Методы проверки точности позиционирования
ГОСТ
27843—88
Metalcutting machine tools.
Test methods for positioning accuracy
(CT СЭВ 6052—87)
ОКП 38 1100
Дата введения 01.01.90
Несоблюдение стандарта преследуется по закону
Настоящий стандарт распространяется на металлорежущие станки с числовым программным управлением (ЧПУ) и устанавливает методы проверки точности позиционирования при перемещении рабочего органа металлорежущего станка.
1.1. Заданное положением рабочего органа станка Pj — заданное или запрограммированное положение рабочего органа станка, в которое он должен переместиться вдоль или вокруг оси координат.
Индекс / отличает заданное положение от других.
1.2. Действительное положение рабочего органа станка Рц — положение рабочего органа при /-м подходе в /-е заданное положение, определенное измерением. Индекс i может иметь значения 1, 2, 3, . .. . , п.
1.3. Отклонение от заданного положения X}j — разность между действительным и заданным положениями рабочего органа станка, определяемое по формуле
Пр и м е ч а н ц е. Вместо обозначения X могут применяться другие обозначения, соответствующие проверяемой координатной оси или углу поворота.
1.4. Одностороннее позиционирование — перемещение и установка рабочего органа в заданное положение, осуществляемое по или вокруг выбранной оси координат при его движении только в
1. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
(В
Издание официальное
Перепечатка воспрещена
© Издательство стандартов, 1988
одном направлении. При позиционировании с подходом в положительном направлении применяют символ а в отрицательном
* 4*
1.5. Двустороннее позиционирование — перемещение и установка рабочего органа в заданное положение, осуществляемое по или вокруг выбранной оси координат при его движении в обоих направлениях.
1.6. Среднее одностороннее отклонение от заданного положения Xj f или Xj 4 — среднее арифметическое отклонений от заданного положения, определенных в положении Pj в серии п односторонних подходов в заданное положение, определяется по формулам
Xyf=-i-2Xyt и = (2)
П ( = 1 П '
1.7. Зона нечувствительности Bj — разность средних односторонних отклонений от заданного положения по или вокруг выбранной оси координат при противоположных направлениях перемещений, определяется по формуле
Bj=X, t -Xj ь (3)
1.8. Размах отклонения от заданного положения W} — алгебраическая разность наибольшего и наименьшего отклонений от заданного положения, определяемая из серии п односторонних подходов; в заданном положении PJt определяется по формулам
Wj f =Ху t max—Ху f min И Wj 4 — Xy 4- max—Xy 4 min. (4)
1.9. Среднее квадратическое отклонение от заданного положения Sj — величина, определяемая из серии п односторонних подходов в заданное положение Р} по формулам (5) или при помощи размахов Wj по формулам (6)
sj^ = Y~^^{Xijf~Xj f)2
/ J -К, + )’; | (5) |
Wj t ап и Sj 4 =Wj 4 -ап, | (6) |
где ап — коэффициент, зависящий от числа п повторных измерений в положении Pj при п, равном 5, ап равно 0,4299; ъ » » 6 » » 0,3946;
» » » 7 » » 0,3698;
» » » 8 » » 0,3512;
» » » 9 » » 0,3367;
» » » 10 » » 0,3429.
1.10. Повторяемость одностороннего позиционирования Rj f пли Rj \ в заданном положении Pj — наибольшее из значений 5 Sj f или 6 Sj то есть
Rj Т ^maxGS^ f или Rj | ~max65y j . (7)
1.11. Повторяемость двустороннего позиционирования RJmах в заданном положении Pj — наибольшее из значений, приведенных
в формуле
Я/тах^^тах^ЗЗу f +35,- 1 +|В7|) или 65; f или 6Sj \ ]. (8)
1.12. Средняя повторяемость двустороннего позиционирования R определяется по формуле
R
п
2
п
Rj t + 2 Rj i
i=l
2 n
(9)
1.13. Повторяемость одностороннего позиционирования Rj f и Rj I и двустороннего позиционирования Rj max — наибольшее значение повторяемости позиционирования в любом заданном положении.
1.14. Точность позиционирования А по или вокруг_оси — наибольшая разность между предельными значениями Xj + 3 5, и Xj —35j независимо от направления перемещения согласно формуле
A^\Xj+ 35,.|max - \Xj-3Sj\mUl. (10)
Определение относится к точности как одностороннего, так и двустороннего позиционирования.
1.15. Средняя зона нечувствительности В — среднее арифметическое суммы зон чувствительности на длине измерения, определяемое по формуле
1.16. Максимальная зона нечувствительности 5тах— максимальное значение зоны нечувствительности \Bj\, определяемое в любом заданном положении.
2. ОБЩИЕ ПОЛОЖЕНИЯ
2.1. Проверку следует проводить одним из методов: 1 — при помощи штриховой меры и микроскопа;
2 — при помощи измерительной линейки с дискретным линей
ным интервалом и прибором для измерения длин;
3 — при помощи измерительной линейки и электронного преоб
разователя;
4 — при помощи лазер-интерферометра;
5 — при помощи автоколлиматора;
6 — при помощи теодолита и целевой марки;
7 — при помощи углового преобразователя.
Примечание. Методы проверки 1-—4 следует применять при прямолинейном перемещении, 5—7 — при вращательном перемещении рабочего органа станка.
Допускается применение методов и средств проверки, отличающихся от указанных в настоящем стандарте при условии, что они обеспечивают соблюдение требований ГОСТ 8.
2.2. Общие требования к методам проверки — по ГОСТ 8.
2.3. Измерения должны проводиться на холостом ходу станка с исключением влияния сил резания и массы изделия.
2.4. Проверку точности позиционирования следует проводить вблизи рабочей поверхности подвижного рабочего органа станка (поверхности стола, суппорта) в середине рабочего пространства.
2.5. Положение неперемещающихся при проверке рабочих органов следует указывать в стандартах на нормы точности станков конкретных типов или в эксплуатационных документах. Если такие указания отсутствуют, то эти органы следует устанавливать в середине диапазона их перемещения и в этом положении закреплять, если это предусмотрено конструкцией станка.
2.6. Скорость перемещения рабочего органа при проверке устанавливают в стандартах на нормы точности металлорежущих станков конкретных типов или в эксплуатационных документах.
2.7. При поступательном движении рабочего органа его заданное положение при проверке определяют по формуле
Pj = \N+r\-P,
где N — целое число;
г — случайная десятичная дробь;
Р — наибольший повторяющийся шаг перемещения по оси.
При этом г имеет различные значения для каждого заданного положения, а N выбирается таким образом, чтобы обеспечить равномерное распределение заданных положений вдоль или вокруг оси.
Число контрольных точек при проверке устанавливают в стандартах на нормы точности металлорежущих станков конкретных типов или в эксплуатационных документах. Если такие указания отсутствуют, то число контрольных точек должно быть не менее 11 на любых двух метрах.
Допускается использование интервала измерения постоянного и некратного шагу измерительного устройства, применяемого в качестве преобразователя, или шагу исполнительного звена (например ходового винта).
2.8. При проверке точности углового позиционирования проверку проводят обязательно в положениях 0, 90, 180 и 270° вращающегося рабочего органа станка. Остальные заданные положения устанавливают в случае измерительного устройства с непрерывной возможностью измерения в соответствии с п. 2.7 , а при использовании оптических полигонов — в зависимости от числа граней полигона.
2.9. Если станок имеет автоматическое устройство коррекции положения (шага резьбы и др.) или ограничения'зазора, то проверку следует проводить при действии этих устройств или с вводом систематических погрешностей в управляющую программу устройства ЧПУ.
2.10. В каждом заданном положении рабочего органа станка должно проводиться не менее 5 измерений (nmin~5)r
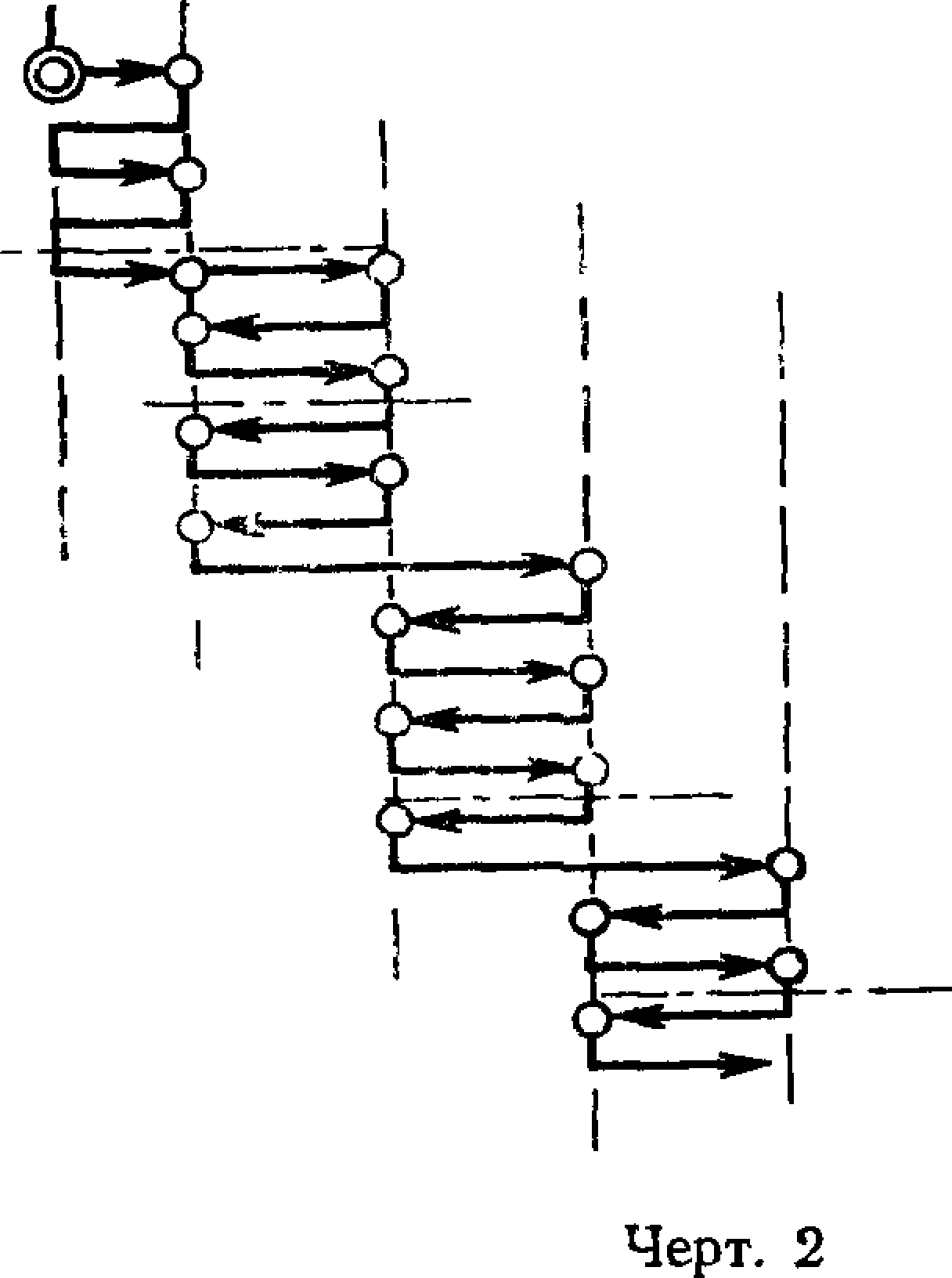
2.11. Последовательность перемещений рабочего органа в заданные положения от исходного до последнего положения выполняют по черт. 1, 2.
Линейный цикл
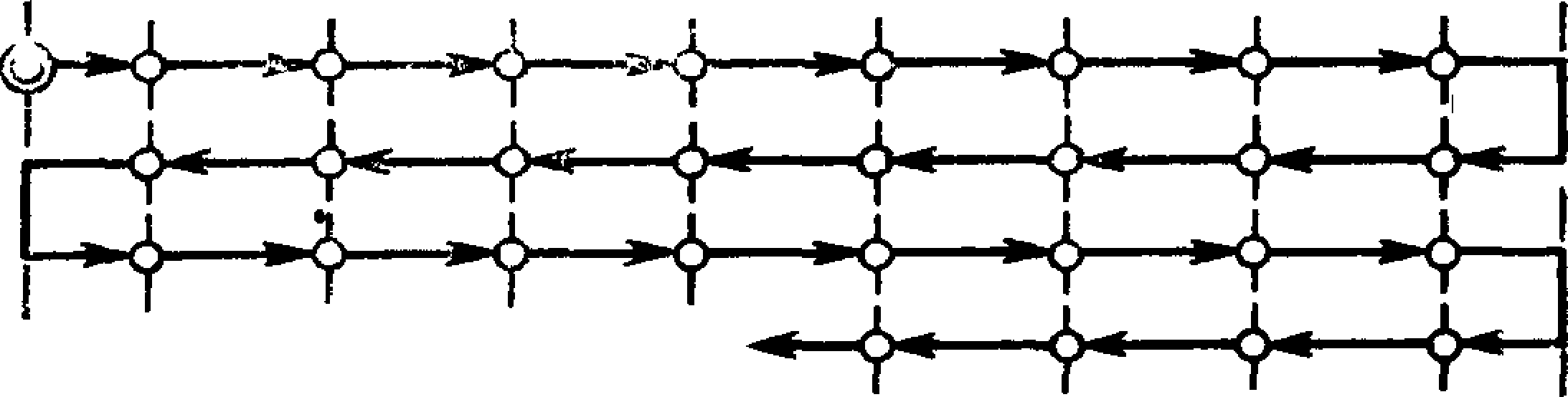
Черт. 1
В технически обоснованных случаях допускается применять другие циклы последовательности перемещения рабочего органа станка в заданные положения.
Применяемый цикл последовательности перемещения должен быть указан в протоколе проверки.
2.12. Дополнительные условия методов проверки позиционирования должны быть указаны в эксплуатационных документах станка.
2.13. Предпочтительным способом представления результатов проверки является графический (черт. 10).
2.14. При проверке определяют параметры точности позиционирования, которые устанавливают в стандартах на нормы точности металлорежущих станков конкретных типов из следующего перечня:
2.14.1. Точность двустороннего позиционирования А;
2.14.2. Повторяемость двустороннего позиционирования /?тах;
2.14.3. Максимальная зона нечувствительности fimax;
Цикл с возвратом шага (псевдопилигримовый)
2.14.4. Точность одностороннего позиционирования А\ и Л|;
2.14.5. Повторяемость одностороннего позиционирования и
3. МЕТОДЫ ПРОВЕРКИ
3.1. Метод 1
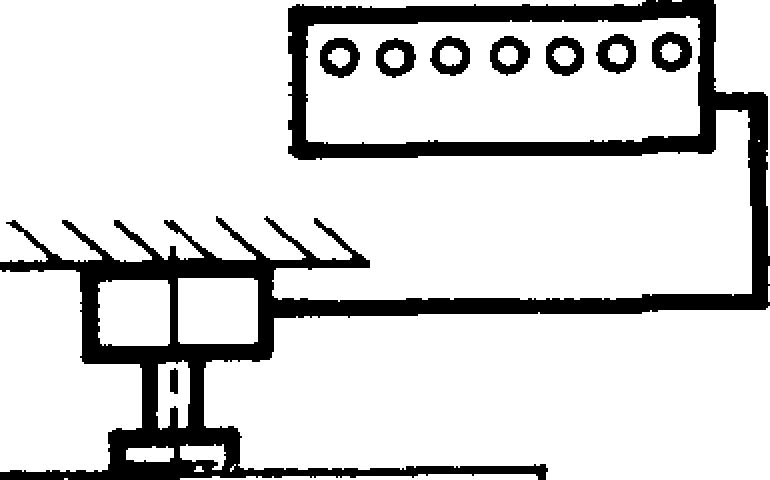
3.1.1. Схема проверки по черт. 3
3.1.2. Средства проверки
Для проведения проверки применяют штриховую меру, микроскоп, регулируемые опоры и средства для установки и закрепления микроскопа.
3.1.3. Проведение проверки
Рабочий орган станка устанавливают в исходное положение.
Штриховую меру при помощи опор устанавливают и закрепляют на подвижном рабочем органе станка в вертикальной и горизонтальной плоскостях параллельно направлению перемещения рабочего органа станка.
Стойку микроскопа закрепляют на неподвижной части станка так, чтобы его оптическая ось была перпендикулярна к измерительной поверхности штриховой меры.
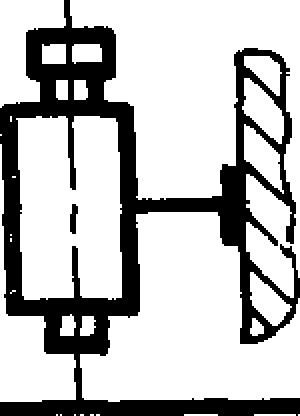
т
В
Черт. 3
Средства проверки могут быть установлены и наоборот: микроскоп — на подвижном рабочем органе, а штриховая мера — на неподвижной части станка.
Рабочий орган перемещают автоматически из исходного в конечное положение по участкам, равным длине интервала измерения в соответствии с избранным циклом так, чтобы в каждое заданное положение Pj рабочий орган переместился п раз; в каждом заданном положении измеряют действительное положение Ру->
указанные значения заносят в таблицу.
3.1.4. Оценка результатов проверки
Для каждого заданного положения Pj и для п подходов в
каждом направлении перемещения устанавливают: отклонение от заданного положения Xtj по п. 1.3; среднее одностороннее отклонение от заданного положения
Xj f и Xj | по п. 1.6;
зона нечувствительности В\ по п. 1.7; _
средняя и максимальная зона нечувствительности В и £тах по пп. 1.15, 1.16;
среднее квадратическое отклонение от заданного положения Sj f и Sj | по п. 1.9;
предельные значения отклонений от положения: X j f + 3 5yf; Xyf-3 Sy|; Xj | + 3 Sy Xy|-3 Sy|;
средняя и максимальная повторяемость позиционирования R и Rtnax ПО пп. 1.12 и 1.13;
точность позиционирования А по п. 1.14.
Пример оценки результатов проверки приведен в приложении.
3.2. Метод 2
3.2.1. Схема проверки по черт. 4
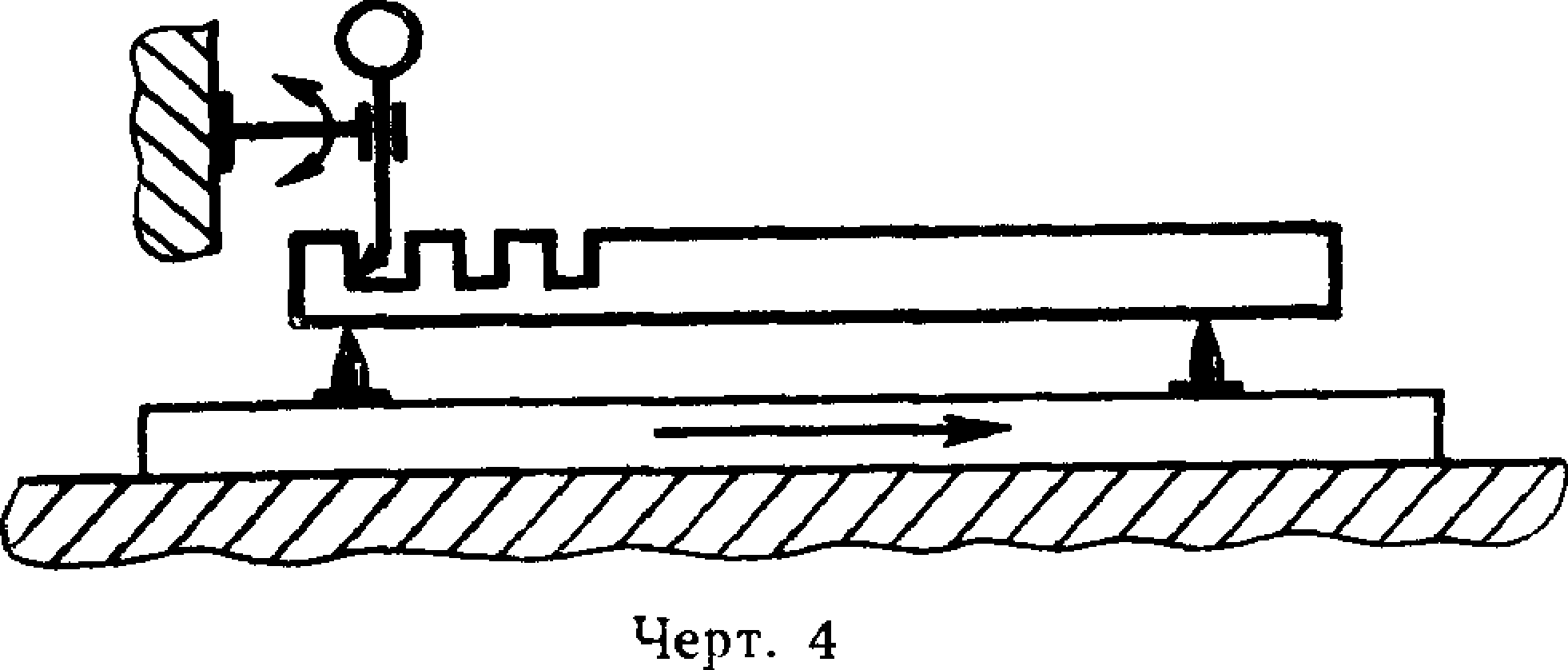
3.2.2. Средства проверки
Для проведения проверки применяют измерительную линейку с дискретным линейным интервалом, прибор для измерения длин, средства для установки и закрепления линейки и прибора для измерения длин.
3.2.3. Проведение проверки
Рабочий орган станка устанавливают в исходное положение.
Рабочий орган станка устанавливают и закрепляют на подвижном рабочем органе станка в вертикальной и горизонтальной плоскостях параллельно направлению перемещения рабочего органа.
Стойку с прибором для измерения длин, которая позволяет перемещать прибор в плоскости, перпендикулярной к продольной оси линейки, закрепляют неподвижно так, чтобы измерительный наконечник прибора касался измерительной плоскости линейки, и отсчитывают показания прибора.
Прибор отводят, рабочий орган перемещают на интервал измерения, прибор опускают до позиции измерения, проводят отсчет.
Дальнейшая последовательность проведения проверки — по п. 3.1.3.
3.2.4. Оценка результатов проверки
Оценку результатов проводят по п. 3.1.4.
3.3. Метод 3
3.3.1. Схема проверки по черт. 5
3.3.2. Средства проверки
Для проведения проверки применяют измерительную линейку, электронный преобразователь, индикационное устройство и средства для их установления и закрепления.
3.3.3. Проведение проверки
Рабочий орган устанавливают в исходное положение.
Измерительную линейку и электронный преобразователь закрепляют на подвижном рабочем органе станка и на неподвижной части станка так, чтобы взаимное положение линейки и преобразователя соответствовало техническим требованиям измерительной системы и инструкции по эксплуатации прибора.
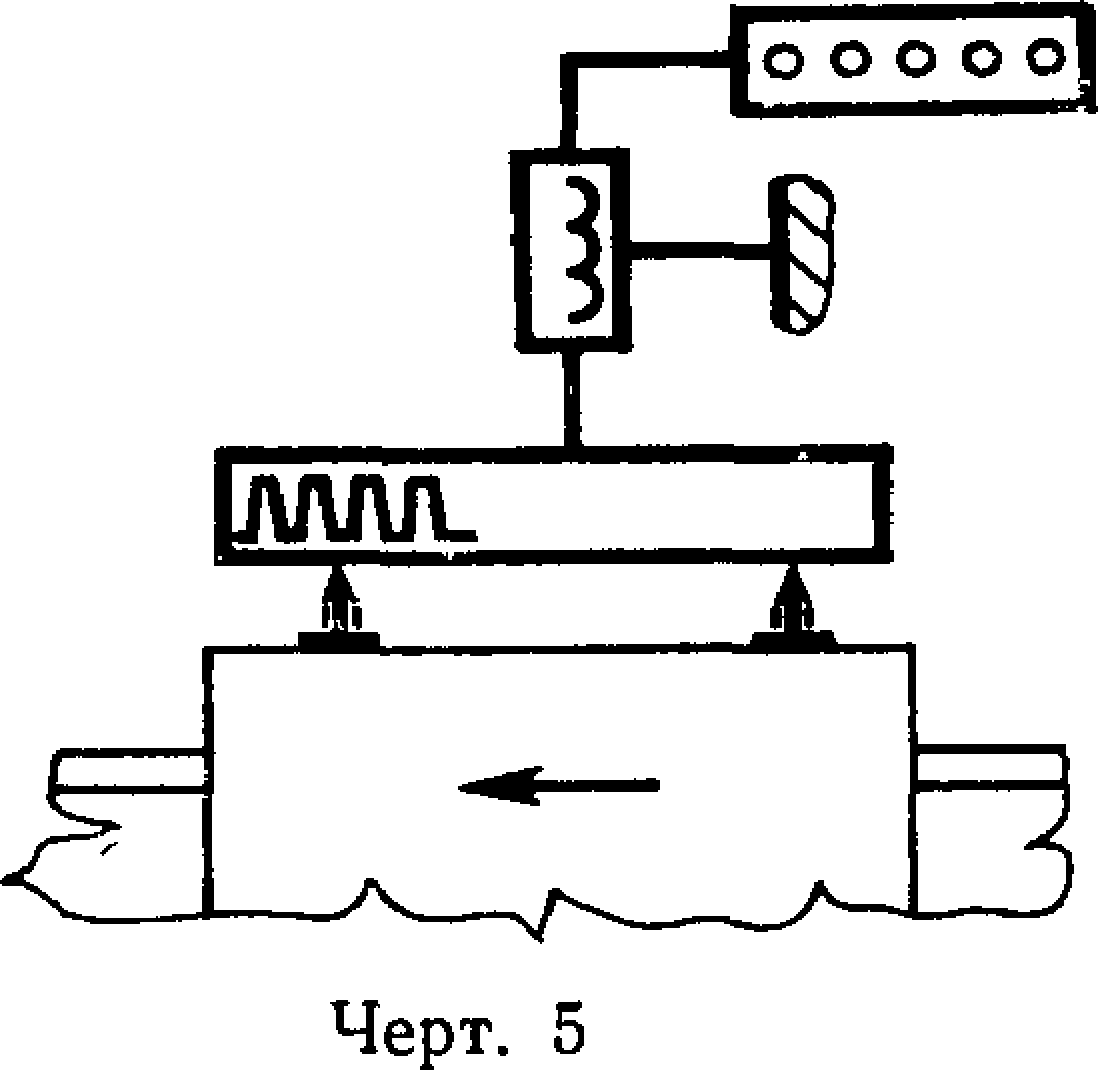
Дальнейшая последовательность проведения проверки — по п. 3.1.3.
3.3.4. Оценка результатов проверки Оценку результатов проводят по п. 3.1.4.
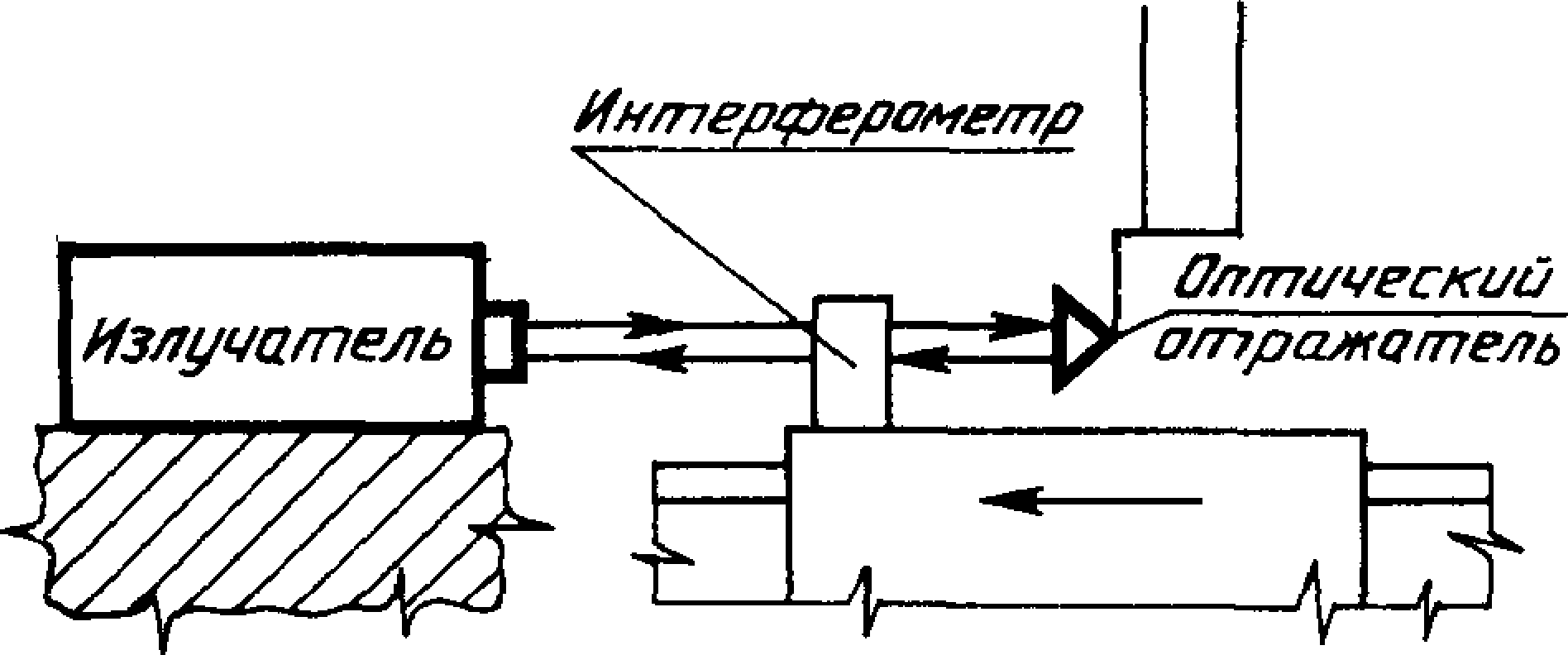
3 4. Метод 4
3.4.1. Схема проверки по черт. 6
Черт. 6
3.4.2. Средства проверки
Для проведения проверки применяют лазер-интерферометр (или излучатель и интерферометр), оптический отражатель, средства для установки и закрепления измерительной системы.
3.4.3. Проведение проверки
Рабочий орган станка устанавливают в исходное положение в первом выбранном по п. 2.7 месте диапазона перемещения рабочего органа.
Лазер-интерферометр (или излучатель и интерферометр) и от ражатель устанавливают и выверяют согласно инструкции по эксплуатации прибора.
Дальнейшая последовательность проведения проверки — по п. 3.1.3 с учетом технических особенностей и инструкции измерительного прибора.
3.4.4. Оценка результатов проверки
Оценку результатов проверки проводят по п. 3.1.4.
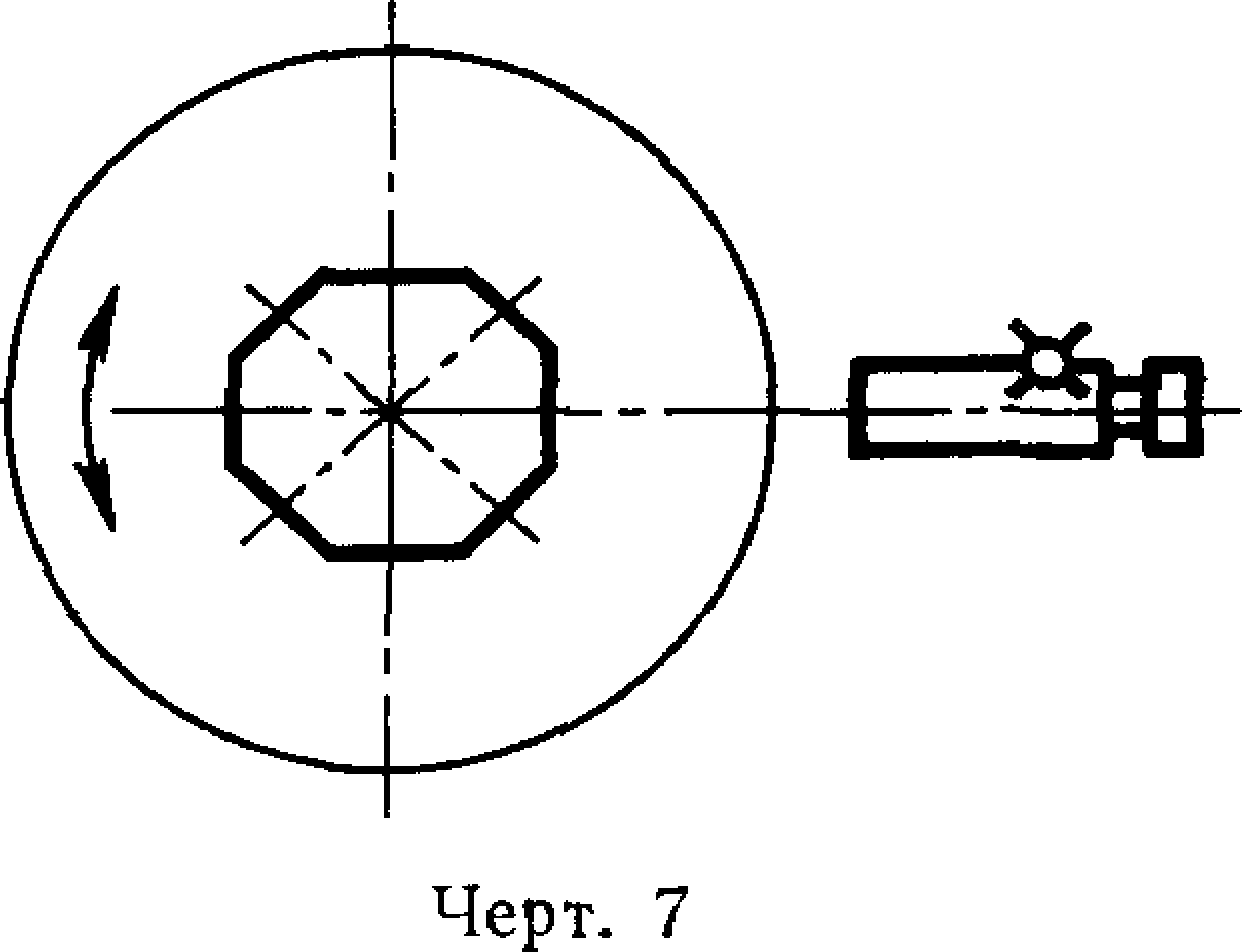
3.5. Метод 5
3.5.1. Схема проверки по черт. 7
3.5.2. Средства проверки
Для проведения проверки применяют автоколлиматор, полигональное зеркало с держателем, стойку или консоль с регулируемым столиком для установки автоколлиматора.
3.5.3. Проведение проверки
На проверяемый рабочий орган станка (с точностью, указанной в инструкции по эксплуатации полигонального зеркала) устанавливают и закрепляют при помощи держателя полигональное зеркало. Рабочий орган станка устанавливают в первое заданное положение. На неподвижную часть станка при помощи стойки или консоли с регулируемым столиком устанавливают автоколлиматор и выверяют так, чтобы показание прибора было равно нулю приблизительно в середине диапазона измерения.
3.5,3.1. У станков, имеющих подход в угловое заданное положение только в одном направлении, рабочий орган станка поворачивают из первого заданного положения в конечное через угловой интервал, равный угловому делению полигонального зеркала.
Рабочий орган продолжают поворачивать в том же направлении на п полных оборотов. В каждом проверяемом положении считывают значения PV} .
3.5.3.2. У станков, имеющих подход в угловое заданное поло жение в обоих направлениях, рабочий орган поворачивают из первого заданного положения в одном направлении вращения через угловой интервал до конечного положения с перебегом и далее в обратном направлении до первого заданного положения с перебегом.
Проверку проводят п раз и в каждом проверяемом положении считывают значения Рц.
Черт. 8
3.5.4. Оценка результатов проверки
Оценку результатов проводят по п. 3.1.4.
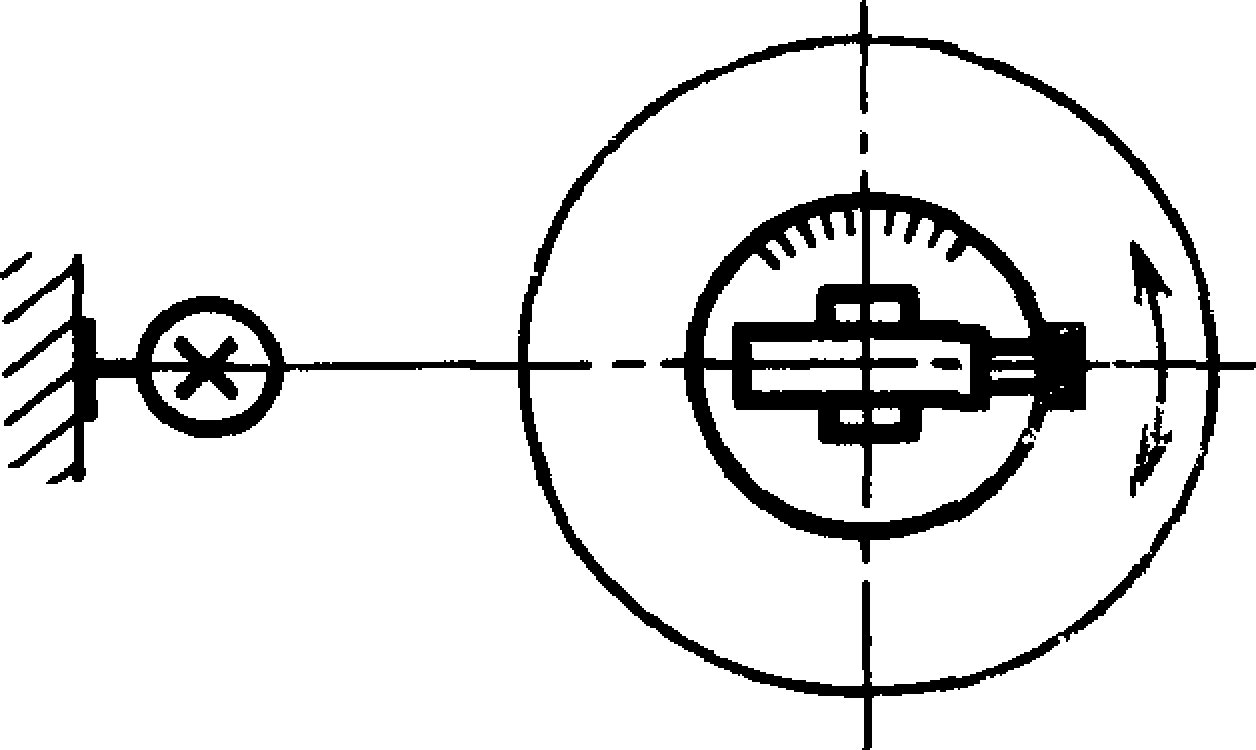
3.6. Метод 6
3.6.1. Схема проверки по черт. 8
3.6.2. Средства проверки
Для проведения проверки применяют теодолит, целевую мар-ку (с коллиматором), средства для установки и закрепления измерительной системы.
3.6.3. Проведение проверки
На проверяемом рабочем органе устанавливают теодолит так, чтобы его ось совпала с осью вращения в соответствии с инструкцией по эксплуатации теодолита. Неподвижно устанавливают целевую марку на продолжение оптической оси теодолита. В первом заданном положении выверяют теодолит с целевой маркой таким образом, чтобы среднее арифметическое двух отсчетов до и после разворота теодолита на 180° было равно нулю.
Дальнейшая последовательность проведения проверки — по пп. 3.5.3.1, 3.5.3.2.
3.6.4. Оценка результатов измерения
Оценку результатов проверки проводят по п. 3.1.4.
3.7. Метод 7
3.7.1. Схема проверки по черт. 9
3.7.2. Средства проверки
Для проведения проверки применяют дискретный угловой измерительный прибор, например фотоэлектрический угловой преобразователь с цифровой индикацией.
3.7.3. Проведение проверки
Измерительный прибор устанавливают и закрепляют на проверяемом рабочем органе станка в соответствии с инструкцией по эксплуатации прибора.
Проверку проводят в соответствии с пп. 3.5.3.1 и 3.5.3.2.
3.7.4. Оценка результатов проверки
Оценку результатов проверки проводят по п. 3.1.4.
Примечания:
1. При использовании методов I, 2 и 3 измерительный прибор устанавливают на неподвижном (подвижном) рабочем органе станка, несущем инструмент, а эталон длины — на подвижном (неподвижном) рабочем органе станка, несущем обрабатываемую деталь.
2. При использовании метода 4 интерферометр устанавливают на неподвижном (подвижном) рабочем органе станка, несущем обрабатываемую деталь, а оптический отражатель на подвижном (неподвижном) рабочем органе станка, несущем инструмент.
3. Допускается измерительный прибор и эталон длины (оптический отражатель) поменять позициями по сравнению с указанными в примечаниях 1 и 2.
4. Допускается измерительный прибор, эталон длины, оптический отражатель устанавливать на другой рабочий орган или приспособление, жестко связанные при проверке с рабочим органом, несущим инструмент или обрабатываемую деталь.
ч.>>
Черт. 9
ПРИЛОЖЕНИЕ
Справочное
ПРИМЕР ОЦЕНКИ РЕЗУЛЬТАТОВ ПРОВЕРКИ ТОЧНОСТИ
ПОЗИЦИОНИРОВАНИЯ
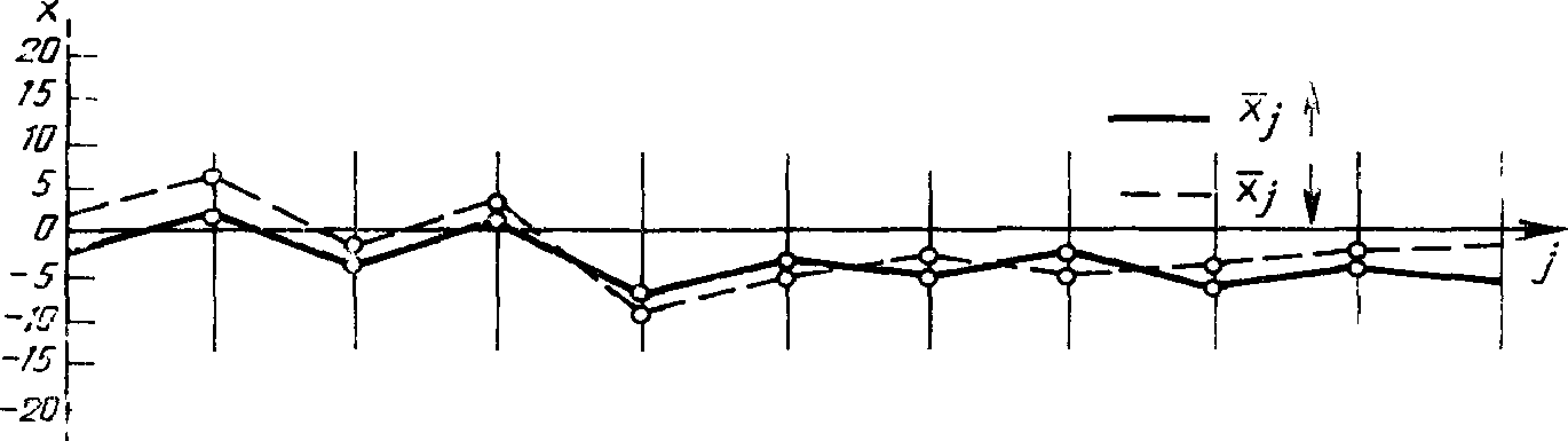
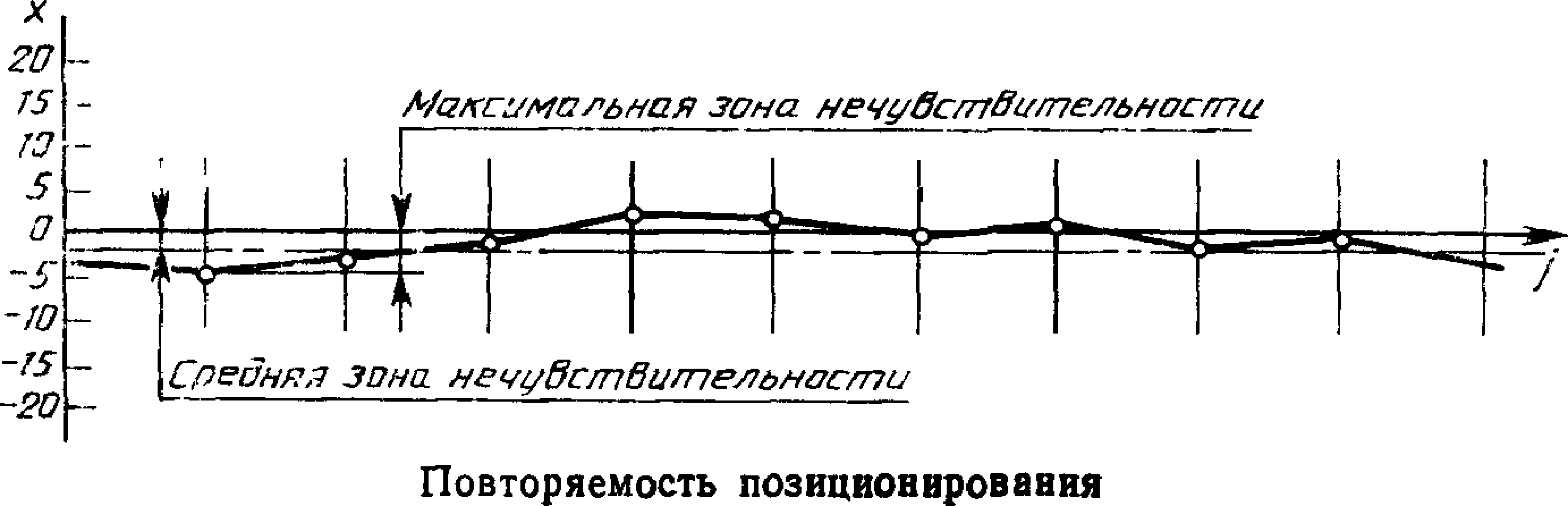
Результаты измерений и расчеты, полученные при проверке точности позиционирования при перемещении рабочего органа станка в заданные положения, приведены в таблице и в диаграммах на чер^. 10.
Допускается соединить диаграмму для обоих направлений перемещения в одну диаграмму.
Если обработка результатов осуществляется при помощи ЭВМ, подключенных к измерительным средствам, таблица может отсутствовать или быть упрощена.
Номер положения j | 1 | 2 | 3 | 4 | 5 | |||||
Заданное положение Pj , мм | 0 | 150,71 | 300,85 | 450,33 | 601,11 | |||||
Направление подхода | t | i | r | 1 | t | 1 | T | i | t | 1 |
Отклонение от заданного положения Xj при t-м подходе 1 2 3 4 5 | -2,6 -1,6 -2,7 -1.8 0,9 | 2,3 1,1 3,2 2.5 1.5 | 0,2 0,7 0,4 1,8 1,5 | 5.4 4.6 5.7 5.4 5,9 | -5,0 —5,6 -4,8 -2,7 -2,8 | — 1,5 -1,0 -0,6 -2,6 —0,8 | 0,6 1,6 0,5 2.3 2.3 | 2,4 2,1 3,6 2,2 2,9 | -8,4 -7,4 -7,8 -6,1 —6,9 | —9,0 -9,4 -8,1 -8,3 -7,8 |
Среднее отклонение от заданного положения Xj | — 1,92 | 2,12 | 0,92 | 5,4 | —4,18 | -1,34 | 1,46 | 2,64 | -7,32 | —8,52 |
Среднее квадратическое отклонение от заданного положения S j | 0,746 | 0,832 | 0,698 | 0,495 | 1,339 | 0,76 | 0,879 | 0,619 | 0,876 | 0,661 |
3 Sj | 2,24 | 2,49 | 2,09 | 1,49 | 4,01 | 2,28 | 2,64 | 1,86 | 2,63 | 1,98 |
Xj + SSj | 0,32 | 4,61 | 3,01 | 6,89 | 0,17 | 0,94 | 4,10 | 4,50 | —4,69 | —6,54 |
Xj —3 Sj | —4,16 | —0,37 | -1,17 | 3,92 - | —8,19 | —3,62 ■ | —1.18 < | 3,78 - | —9,95. | — 10,50 |
6 | 7 | 8 | 9 | 10 | И | ||||||
750,31 | 901,55 | 1050,02 | 1201,90 | 1351,56 | 1500,41 | ||||||
t | 4 | т | 1 | т | 1 | I | t | т | i | ||
-5,9 -3,7 -4,7 -3,4 -2,3 | —5,9 —5,9 -4,0 -4,3 -2,9 | -6,3 —5,1 —5,6 -4,1 —3,2 | —5,8 —5,6 -4,7 -4,2 — 3,3 | —5,5 -3,6 —5,0 -2,3 -2,3 | —5,6 -4,8 -4,4 -4,4 -2,0 | -8,2 -5,9 -5,3 -4,6 -3,4 | -6,1 -5,0 -4,8 -3,1 -2,0 | -7,4 —5,5 -5,4 -3,7 -2,2 | -5,6 -4,6 -2,9 -2,8 -1,4 | -7,8 -5,8 — 5,6 -4,7 -2,7 | -3,0 -1.8 -0,2 0,0 -2,7 |
—3,80 | -4,60 | —4,86 | —4,72 | -3,74 | -4,24 | -5,68 | -4,20 | — 4,84 | —3,46 | -5,32 | — 1,54 |
1,054 | 1,996 | 1,226 | 1,028 | 1,488 | 1,345 | 1,813 | 1,632 | 1,973 | 1,649 | 1,851 | 1,884 |
3,16 | 3,98 | 3,68 | 3,08 | 4,46 | 4,03 | 5,44 | 4,90 | 5,92 | 4,96 | 5,55 | 4,15 |
—0,64 | -0,71 | —1,18 | —1,64 | 0,72 | —0,20 | - 0,24 | 0,70 | 1,08 | 1,54 | 0,23 | 2,61 |
—6,96 | — 8,49 | —8,54 | —7,80 | —8,20 | —8,27 | — 11,12 | -9,10 | -10,76 | —8,41 | -10,87 | —5,69 |
Зона чувствительности Bj | —4,04 | —4,48 | —2,84 | —1,18 | 1,20 |
Наибольшее 1 из значений 6Sjt или 6 SjX или 3 Sj ++3$j * + 1 Bj\ | 8,77 | 8,06 | 9,13 | 5,68 | 5,81 |
Точность двустороннего позиционирования А~('ЯгЧ-ЗЗгЗтах—~
Повторяемость двустороннего позиционирования /?щах~ 13,49
Максимальная зона нечувствительности Втах~4,48 (положе
Точность одностороннего позиционирования
f max—
A max
*:oi = 2X3
Повторяемость одностороннего позиционирования
=s 2X3
— in
Средняя зона нечувствительности 2 Bj =1,53 мкм
/ «= 1
Продолжение
1 0,80 | —0,14 | 0,50 | — 1,48 | — 1,38 | —3,79 |
j 7,85 | 6,90 | 8,99 | 11,82 | 12,26 | 13,49 |
{Х%—3Si0min=6,89— (—11,12) = 18,01 мкм | |||||
(положение И) | |||||
ние 2) | |||||
(Xs—3Se)+—4,10—(—11,12) = 15,22 мкм (ХБ—aSsH=6,89—(—10,50) = 17,30 мкм | |||||
5101^11,84 мкм 5]oi=9,92 мкм | |||||
Среднее отклонение от заданного положения
Зона нечувствительности
- перемещение в положительном направлении x/t + 3Syf и x/f —3Sy|
---перемещение в отрицательном направлении + и х;| —3Syj
Точность двустороннего /тозоцоониро&аноя
Точность позиционировано# б отрицательном на/травлении
Точность позиционирования в полот отель ном напра влении
1
И
Повторяемость в положительном направлении
Повторяемость & отрицательном направлении
Повторяемость ввг/сторощеео лозоцоонировонил
Черт. 10
Точность двустороннего позиционирования Повторяемость двустороннего позиционирования
Максимальная зона нечувствительности Точность одностороннего позиционирования
Повторяемость одностороннего позиционирования
Л —18,01 мкм.
Rjmах — 13,49 МКМ.
Яшах =4,48 МКМ. Л| —15,22 мкм;
Л|—17,39 мкм.
Rj ^ = 11,84 мкм;
R/ I — 9,92 мкм.
Средняя зона нечувствительности
£=1,53 мкм
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством станкостроительной и инструментальной промышленности СССР
ИСПОЛНИТЕЛИ
Л. М. Кордыш, канд. техн. наук; А. Н. Байков, канд. техн. наук; С. С. Кедров, канд. техн. наук; Н. П. Семченкова; А. И. Камышев, канд. техн. наук; В. В. Жедь, канд. техн. наук
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 29.09.88 № 3358
3. Срок проверки — 1998 г.; периодичность проверки — 5 лет.
4. Стандарт полностью соответствует СТ СЭВ 6052—87
5. ВВЕДЕН ВПЕРВЫЕ
6. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Наименование НТД, на который дана ссылка
Номер пункта
Редактор В. М. Лысенкина Технический редактор Л. Я. Митрофанова Корректор Т. А. Васильева
Сдано ь наб. 26.10,83 Подп. в печ. 14.12.88 1,25 уел. п. л. 1,375 уел. кр.-отт. 1,02 уч,-изд. л.
Тираж 18000 Пена 5 коп-
Ордена «Знак Почета» Издательство стандартов, 123840, Москва, ГСП,
Новопресненский пер., 3.
Калужская типография стандартов, ул. Московская, 256. Зак. 2391
