ГОСТ Р 71614-2024
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Машины землеройные
АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ВЫСОКОАВТОМАТИЗИРОВАННЫМИ ЗЕМЛЕРОЙНЫМИ И ДОРОЖНО-СТРОИТЕЛЬНЫМИ МАШИНАМИ
Технические требования и методы испытаний
Hardware-software system for automated control of highly automated earth-moving and road-building machines. Technical requirements and test methods
ОКС 19.060
Дата введения 2025-01-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "ДСТ-УРАЛ" (ООО "ДСТ-УРАЛ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 267 "Строительно-дорожные машины и оборудование"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 18 сентября 2024 г. № 1252-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Настоящий стандарт создан в соответствии с программой по разработке национальных стандартов в области машиностроения, в том числе направленных на сокращение зависимости от импортной продукции и технологий, в результате применения которых на добровольной основе обеспечивается соблюдение требований к безопасности высокоавтоматизированных землеройных и дорожно-строительных машин гусеничного и колесного типа.
С ростом сложности технологий программного обеспечения и мехатронных устройств увеличиваются риски, связанные с систематическими и случайными отказами аппаратных средств, рассматриваемыми в рамках функциональной безопасности.
Стандарт определяет подход к оценке и проверке для всех видов деятельности, связанных с безопасностью аппаратно-программного комплекса автоматизированного управления, включающих электрические и (или) электронные и (или) программируемые электронные системы на рассматриваемых землеройных и дорожно-строительных машинах с уровнем автоматизации 0-5, используемых в любых видах дорожных работ.
Стандарт может применяться для тестирования при разработке новых и модернизации существующих систем управления и робототехнических комплексов, отборе модулей и компонентов системы управления из смежных отраслей экономики, закупках зарубежных систем управления и испытаниях управляющих комплексов.
1 Область применения
Настоящий стандарт устанавливает технические требования и методы испытаний на безопасность автоматизированных систем управления с разделением по уровням автоматизации для высокоавтоматизированной дорожно-строительной техники гусеничного или колесного типа, которая частично или полностью выполняет задачу управления рабочими функциями машин в процессе их использования.
Настоящий стандарт распространяется на разрабатываемые и выпускаемые системы управления высокоавтоматизированных землеройных и дорожно-строительных машин гусеничного или колесного типа.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 2.314 Единая система конструкторской документации. Указания на чертежах о маркировании и клеймении изделий
ГОСТ 12.1.004 Система стандартов безопасности труда. Пожарная безопасность. Общие требования
ГОСТ 12.1.007 Система стандартов безопасности труда. Вредные вещества. Классификация и общие требования безопасности
ГОСТ 12.1.009 Система стандартов безопасности труда. Электробезопасность. Термины и определения
ГОСТ 12.1.010 Система стандартов безопасности труда. Взрывобезопасность. Общие требования
ГОСТ 12.2.011 Система стандартов безопасности труда. Машины строительные, дорожные и землеройные. Общие требования безопасности
ГОСТ 12.4.026-2015 Система стандартов безопасности труда. Цвета сигнальные, знаки безопасности и разметка сигнальная. Назначение и правила применения. Общие технические требования и характеристики. Методы испытаний
ГОСТ 14.201 Обеспечение технологичности конструкции изделий. Общие требования
ГОСТ 20.39.108-85 Комплексная система общих технических требований. Требования по эргономике, обитаемости и технической эстетике. Номенклатура и порядок выбора
ГОСТ 12969 Таблички для машин и приборов. Технические требования
ГОСТ 12971 Таблички прямоугольные для машин и приборов. Размеры
ГОСТ 14254-2015 (IEC 60529:2013) Степени защиты, обеспечиваемые оболочками (код IP)
ГОСТ 22614 Система "человек-машина". Выключатели и переключатели клавишные и кнопочные. Общие эргономические требования
ГОСТ 23170 Упаковка для изделий машиностроения. Общие требования
ГОСТ 28213 (МЭК 68-2-27-87) Основные методы испытаний на воздействие внешних факторов. Часть 2. Испытания. Испытание Ea и руководство: Одиночный удар
ГОСТ 30804.4.3-2013 (IEC 61000-4-3:2006) Совместимость технических средств электромагнитная. Устойчивость к радиочастотному электромагнитному полю. Требования и методы испытаний
ГОСТ 30805.22-2013 (CISPR 22:2006) Совместимость технических средств электромагнитная. Оборудование информационных технологий. Радиопомехи индустриальные. Нормы и методы измерений
ГОСТ 33990 Транспортные средства. Маркировка. Технические требования
ГОСТ ISO 5010 Машины землеройные. Системы рулевого управления колесных машин
ГОСТ ISO 9533 Машины землеройные. Звуковые устройства предупреждающей сигнализации при перемещении и передние сигнальные устройства. Методы испытаний и критерии эффективности
ГОСТ ISO 10265 Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем
ГОСТ ISO 13766 Машины землеройные. Электромагнитная совместимость
ГОСТ ISO 15998 Машины землеройные. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность
ГОСТ ISO/IEC 17025 Общие требования к компетентности испытательных и калибровочных лабораторий
ГОСТ Р 2.601 Единая система конструкторской документации. Эксплуатационные документы
ГОСТ Р 50571.16/МЭК 60364-6:2016 Электроустановки низковольтные. Часть 6. Испытания
ГОСТ Р 51317.2.4-2000 (МЭК 61000-2-4-94) Совместимость технических средств электромагнитная. Электромагнитная обстановка. Уровни электромагнитной совместимости для низкочастотных кондуктивных помех в системах электроснабжения промышленных предприятий
ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов. Общие технические условия
ГОСТ Р 56205/IEC/TS 62443-1-1:2019 Сети коммуникационные промышленные. Защищенность (кибербезопасность) сети и системы. Часть 1-1. Терминология, концептуальные положения и модели
ГОСТ Р 57612 (ИСО 11429:1996) Эргономика. Система звуковых и визуальных сигналов опасности и информационных сигналов
ГОСТ Р 58839 Автомобильные транспортные средства. Системы опережающего экстренного торможения. Общие технические требования и методы испытаний
ГОСТ Р 70851 Тракторы и машины сельскохозяйственные. Полигон для испытания высокоавтоматизированных машинно-тракторных агрегатов. Технические требования
ГОСТ Р 70852 Тракторы и машины сельскохозяйственные. Аппаратно-программный комплекс для управления высокоавтоматизированными машинно-тракторными агрегатами. Технические требования и методы испытаний
ГОСТ Р ИСО 7731-2007 Эргономика. Сигналы опасности для административных и рабочих помещений. Звуковые сигналы опасности
ГОСТ Р ИСО 13849-1 Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования
ГОСТ Р ИСО 15006 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению звуковой информации внутри транспортного средства
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 аппаратно-программный комплекс; АПК: Аппаратно-технические средства, предназначенные для автоматизированного управления работой землеройных и дорожно-строительных машин (бульдозерами, погрузчиками, трубоукладчиками и т.д.) и информационного обеспечения систем управления.
Примечание - Совместное применение программных и технических средств для решения задач автоматизации уровней 1-5.
3.2 землеройная и дорожно-строительная машина; ЗДСМ: группа машин (автомобильной техники), предназначенных для дорожного строительства, а также для ремонта и очистки дорог. В зависимости от выполняемых функций дорожно-строительные машины разделяют на группы: машины для подготовительных работ; для укладки и обслуживания дорожных покрытий; для разработки карьеров и обогащения материалов; землеройные машины и др.
Примечание - Определение дано согласно [1].
3.3
высокоавтоматизированная землеройная и дорожно-строительная машина; ВАЗДСМ: Землеройная или дорожно-строительная машина с оператором на борту или без него с возможностью высокоавтоматизированной работы, в том числе с установленным прицепным и навесным оборудованием, сконструированная специально для применения автоматической системы управления, которая активна в работе в пределах ограничений условий эксплуатации. [Адаптировано из ГОСТ Р 70850-2023, пункт 3.1.1] |
3.4
рассматриваемая высокоавтоматизированная землеройная и дорожно-строительная машина; РВАЗДСМ: Высокоавтоматизированная землеройная и дорожно-строительная машина, оснащенная аппаратно-программным комплексом и исполнительными механизмами. [Адаптировано из ГОСТ Р 70850-2023, пункт 3.1.2] |
3.5 исполнительные механизмы; ИМ: Элементы конструкции высокоавтоматизированной землеройной и дорожно-строительной машины, выполняющие функции управления машиной и ее агрегатами с помощью механизмов (двигатель, трансмиссия, органы управления, система подачи топлива, тормозная система, электрическая система, гидравлическая система).
3.6
задача управления движением; ЗУД: Совокупность выполняемых в реальном времени функций управления и планирования действий (тактические функции), которые требуются для управления транспортным средством в условиях дорожного движения, исключая стратегические функции, такие как планирование поездок, выбор пунктов назначения и промежуточных точек маршрутов. [ГОСТ Р 58823-2020, пункт 2.13] |
3.7
система (технология) автоматизации управления движением: Аппаратные и программные средства систем автоматического управления движением уровней 1-5, которые в совокупности способны выполнять всю ЗУД или ее часть в длительном режиме. [ГОСТ Р 58823-2020, пункт 2.8] Примечание - В отличие от этого общего термина, характеризующего системы уровней 1-5, термин "Автоматическая система управления движением" (АСУД) используется только для систем уровней 3-5. Ввиду сходства между общим термином "система автоматизации управления движением" и термином "автоматическая система управления движением", применяемым для уровней 3-5, второй термин предпочтительнее использовать в виде аббревиатуры АСУД. |
3.8 подсистема автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машиной; ПС: Комплекс компонентов обнаружения, программного обеспечения, блоков управления, обладающий функциями идентификации, аналитики, оповещения, предупреждения, измерения координат, параметров движения целевых объектов, идентификации неподвижных целевых объектов и элементов инфраструктуры и их распознавания, воздействия на исполнительные органы землеройной и дорожно-строительной машины, перевод высокоавтоматизированной землеройной и дорожно-строительной машины в безопасное положение.
Примечание - АСУ, соответствующая уровням автоматизации 1-5. (ВАЗДСМ УА 0 - ЗДСМ без помощи системы автоматизации; ВАЗДСМ УА5 является в полном смысле "беспилотным" ЗДСМ). Определение дано на основе ГОСТ Р 70852.
3.9 компонент обнаружения; КО: Исполнительные элементы подсистем автоматизированной системы управления (видеокамеры, радары, лидары, датчики и т.п.).
3.10 эффективная поверхность рассеивания; ЭПР: Мера отражающей способности целевого объекта, выражаемая в виде отношения плотностей мощности радиолокационного сигнала, рассеянного целевым объектом в направлении приемника, и сигнала, облучающего цель, с учетом их векторных свойств.
 |
Примечание - Все приведенные в дальнейшем графические элементы подразумевают ВАЗДСМ гусеничного или колесного типа независимо от изображенного типа машины на рисунках.
3.12 зона контроля: Область пространства, находящаяся перед передней либо за задней кромкой рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины, на которую распространяются дальность действия и угол обзора компонентов обнаружения автоматизированной системы управления (АСУ) или оператора рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины гусеничного или колесного типа.
Примечание - Зона контроля, подсистемы обнаружения - задняя левая и задняя правая зоны контроля подсистемами АСУ (см. рисунок 2).
 |
1 - рассматриваемая высокоавтоматизированная землеройная и дорожно-строительная машина гусеничного или колесного типа; 2, 3 - целевой объект в зоне компонентов обнаружения подсистемы автоматизированной системы управления рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины; 4 - зона контроля подсистемы обнаружения автоматизированной системы управления (серый фон); 5 - основная зона контроля (длинный пунктир); 6 - дополнительная (правая боковая) зона контроля подсистемы обнаружения автоматизированной системы управления (короткий пунктир); 7 - дополнительная (левая боковая) зона (короткий пунктир); 8 - компоненты обнаружения (слева - видеокамера, справа - радар фронтальный); 9 - зона контроля подсистемы обнаружения
Рисунок 2 - Зоны контроля подсистемы обнаружения
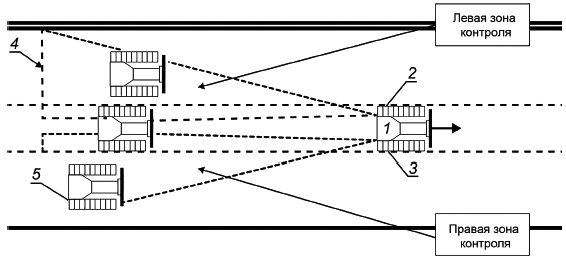 |
1 - рассматриваемая высокоавтоматизированная землеройная и дорожно-строительная машина гусеничного или колесного типа; 2 - задний левый радар рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины; 3 - задний правый радар рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины; 4 - задняя левая боковая зона контроля компонентов обнаружения, определяемая дальностью обнаружения заднего левого радара (короткий пунктир); 5 - задняя правая боковая зона контроля компонентов обнаружения, определяемая дальностью обнаружения заднего правого радара (точечный пунктир)
Рисунок 3 - Задняя левая и задняя правая зоны контроля подсистемами автоматизированной системы управления
Примечание - Определения даны на основе ГОСТ Р 70852.
3.13 дальность обнаружения компонентов обнаружения автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машиной: Максимальная дальность обнаружения, выбираемая из дальностей обнаружения компонентов обнаружения, установленных на рассматриваемом транспортном средстве.
3.14 зона контроля автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машины: Область пространства, находящаяся перед рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машиной, форма и размеры которой определяются формой и размерами зон контроля.
3.15 зона предупреждения подсистемы обнаружения автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машины: Участок основной или дополнительной зоны контроля, при попадании в которую целевого объекта подсистема предупреждения рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины должна оповещать окружающих и оператора предупреждающими сигналами.
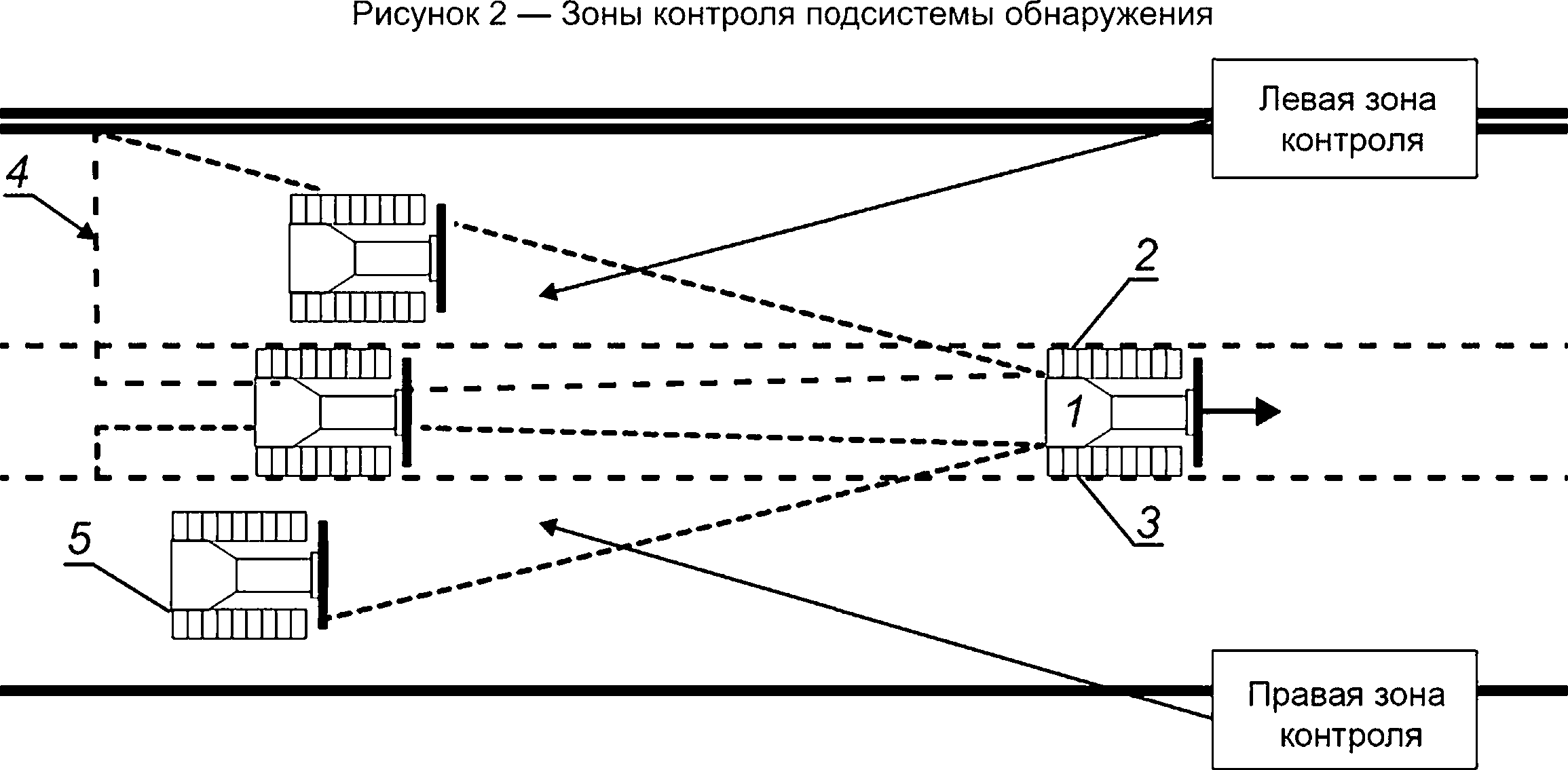 |
Рисунок 4 - Зоны опережающего экстренного торможения
3.16 зона торможения: Ровный и гладкий с уклоном не более 1% в направлении движения или 3% поперек участок зоны предупреждения, располагающийся на требуемом направлении движения рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины, в начале которого подсистема управления должна задействовать тормозные механизмы, исходя из времени до столкновения, рассчитанного аналитической подсистемой.
Примечание - Зоны контроля и опережающего экстренного торможения представлены на рисунках 2 и 4. Определение дано с учетом ГОСТ ISO 10265.
3.17 время до столкновения; ВДС: Интервал времени, за которое рассматриваемая высокоавтоматизированная землеройная и дорожно-строительная машина при относительной скорости преодолела бы расстояние, равное текущей дистанции до целевого объекта.
Примечание - Время до столкновения вычисляют путем деления дистанции a на относительную скорость V рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины 1 (см. рисунок 5) и целевого транспортного средства 2 в конкретный момент времени.
 |
Рисунок 5 - Определение времени до начала столкновения
3.18 опасность для движения: Ситуация, возникшая в процессе движения при выполнении задания, при которой продолжение движения в том же направлении и с той же скоростью создает угрозу возникновения дорожно-транспортного происшествия.
3.19 передняя дистанция зоны контроля: Продольная дистанция между передним габаритом рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины и задним габаритом группы целевых объектов, при которой целевые объекты предположительно должны определяться и опознаваться компонентами подсистемы распознавания.
3.20 система обеспечения безопасности оператора; СОБО: Составная часть подсистемы предупреждения автоматизированной системы управления, состоящая из элементов аудио-, видео- и тактильных предупреждений.
3.21 тактильные сигналы: Предупреждающие сообщения, представляющие собой осязательные воздействия на оператора рассматриваемой высокоавтоматизированной землеройной и дорожностроительной машины, передающиеся через органы управления рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины либо сиденье оператора.
Примечание - Тактильные сигналы применимы при уровнях автоматизации 0-3.
3.22 тональные сигналы: Аудиопредупреждения, представляющие собой один или несколько простых звуков с фиксированным составом частот, различающихся по тональности, громкости или частоте повторений.
3.23 аудиопредупреждения: Предупреждающие сигналы, предназначенные для восприятия органами слуха оператора или пользователя рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины.
Примечание - В качестве аудиопредупреждений используются голосовые аудиосообщения, предупреждающие оператора аудиосообщения системы РВАЗДСМ, созданные путем имитации или записи голоса человека; тональные аудиосообщения, предупреждающие оператора аудиосообщения системы рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины, выдаваемые посредством тональных звуковых сигналов, различающихся по громкости, тональности и частоте повторений. Тональные аудиосообщения должны соответствовать ГОСТ Р ИСО 7731 и ГОСТ Р ИСО 15006.
3.24 визуальные сообщения: Предупреждающие сигналы, предназначенные для восприятия органами зрения оператора или пользователя рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины.
3.25 текстовые сообщения: Визуальные сообщения, содержащие текст.
3.26 графические сообщения: Визуальные сообщения, представляющие собой схематичные графические или видеоизображения рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины и целевых объектов, находящихся в зоне контроля компонентов обнаружения подсистем автоматизированной системы управления.
3.27 оператор: Пользователь рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины, который непосредственно осуществляет физические управляющие воздействия на органы управления землеройной и дорожно-строительной машины.
3.28 мониторинг: Действие по определению состояния рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины в реальном времени и обработки полученных данных для управления, сбора данных, анализа или поддержания его работы.
3.29 предупреждающие сообщения: Сообщения подсистем предупреждения или диагностики автоматизированной системы управления, информирующие оператора о необходимости вмешательства в управление рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины либо для обращения его внимания на целевые объекты, представляющие потенциальную либо явную угрозу для продолжения требуемого направления движения рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины с текущей скоростью.
3.30 блок управления; БУ: Электронное устройство, контролирующее взаимодействие и согласованность работы электронных компонентов подсистем автоматизированной системы управления.
3.31 видеокамера; ВК: Устройство, являющееся составной частью системы непрямого обзора, воспринимающее видеоизображение пространства, окружающего рассматриваемую высокоавтоматизированную землеройную и дорожно-строительную машину, преобразующее его в цифровой сигнал (например, видеосигнал) и передающее его в бортовую сеть рассматриваемой высокоавтоматизированной землеройной и дорожно-строительной машины.
3.33 пульт управления; ПУ: Совокупность приборов, средств отображения информации и органов управления высокоавтоматизированной землеройной и дорожно-строительной машины, размещенных на общей панели при уровне автоматизации 0-2, удаленно при уровне автоматизации 3-5.
3.34 сухая дорога: Участок с дорожным (грунтовым) покрытием, на котором номинальный пиковый коэффициент торможения составляет 0,9.
Примечание - Вышеуказанные определения даны на основе ГОСТ Р 70852.
4 Сокращения
В настоящем стандарте применены следующие сокращения:
АИЛ - аккредитованная испытательная лаборатория;
АХОВ - аварийно-химические опасные вещества;
БУ - блок управления;
ЗДСМ - землеройная и дорожно-строительная машина;
МФВ - мультифункциональная видеокамера переднего обзора;
ПО - программное обеспечение;
РЗЛ - радар задний левый ближнего диапазона обнаружения;
РЗП - радар задний правый ближнего диапазона обнаружения;
РФ - радар фронтальный дальнего диапазона обнаружения;
ТС - транспортное средство;
ЦТС - целевое транспортное средство;
ЦО - целевой объект;
УА - уровень автоматизации;
IP - международные коды защиты;
ТД - техническая документация;
НО - навесное оборудование.
5 Технические требования
5.1 Общие положения
На ВАЗДСМ испытывают работоспособность АПК, предустановленного производителем и интегрированного в машину, а также при модернизации техники с переводом на более высокую степень автоматизации.
В случае испытаний модернизированной техники мониторинг параметров работоспособности АПК проводят с помощью натурных испытаний на мобильной платформе с модульной схемой установки компонентов.
Методы оценки соответствия бульдозеров, трубоукладчиков и иных землеройных и дорожно-строительных машин с высокой степенью автоматизации управления осуществляют согласно уровням автоматизации ВАЗДСМ.
Примечание - Определения общих положений для ВАЗДСМ даны на основе ГОСТ Р 70852.
Таблица 1 - Уровни автоматизации управления высокоавтоматизированной землеройной и дорожно-строительной машиной
УРОВЕНЬ 0 | УРОВЕНЬ 1 | УРОВЕНЬ 2 | УРОВЕНЬ 3 | УРОВЕНЬ 4 | УРОВЕНЬ 5 |
Безопасность определяется посредством постоянного контроля оператором работы органов и систем ВАЗДСМ | Безопасность определяется посредством постоянного контроля оператором работы органов и систем ВАЗДСМ по мере необходимости для поддержания безопасности | Безопасность определяется алгоритмами работы систем ВАЗДСМ. Системы работают автономно. Управление ВАЗДСМ осуществляется удаленно и электронно без использования органов управления в кабине | |||
Процесс управления работой органов и агрегатов полностью осуществляет оператор без помощи | Процесс управления работой органов и агрегатов осуществляет оператор. Система обеспечивает адаптивную помощь для эффективности работы ВАЗДСМ | Частичная автоматизация работ. Оператор полностью контролирует и управляет всем процессом. Часть функций и операций автоматизи- рована | ВАЗДСМ способна работать автономно длительное время. Оператор берет "управление на себя" по запросу системы. Возможно удаленное управление | Оператор осуществляет работы лишь при построении рабочего задания, устранении сбоев, сервисных работах. Вмешательство оператора в работу ВАЗДСМ в течение рабочей смены не требуется | Оператор воздействует лишь при проведении сервисных и ремонтных работ. Автоматизи- рованная система управления работой агрегатов и органов ВАЗДСМ не требует какого-либо вмешательства при работе |
АПК РВАЗДСМ, вне зависимости от УА, должна обеспечивать:
а) выполнение задач управления в пределах требований рабочего задания;
б) контроль внешних условий эксплуатации;
в) безопасное и предсказуемое взаимодействие с другими участниками рабочего процесса, выполнение сценария "свой - чужой";
г) безопасное реагирование на ошибки, допускаемые другими участниками рабочего процесса;
д) возможность диагностирования и оповещения о возникновении неисправностей компонентов АСУ на любом этапе эксплуатации;
е) создание условий, которые обеспечивают минимальный возможный уровень риска в случае сбоя в работе автоматизированной системы управления механизмами ВАЗДСМ;
ж) перевод ВАЗДСМ в состояние минимального риска, если выполнение установленных задач может быть продолжено только с нарушением правил эксплуатации;
и) немедленное оповещение оператора о нарушении режимов АСУ ВАЗДСМ;
к) автоматическое распознавание системных ограничений и перевод высокоавтоматизированной землеройной и дорожно-строительной машины в состояние минимального риска при выходе за пределы штатной эксплуатации;
л) возможность отключения системы управления в любое время оператором ВАЗДСМ и, в случае отключения, перевод высокоавтоматизированной землеройной и дорожно-строительной машины в состояние минимального риска.
5.2 Строение АПК ВАЗДСМ
АПК ВАЗДСМ, независимо от УА, в общем случае включает в себя:
- исполнительные механизмы ЗДСМ вне зависимости от степени УА: двигатель, трансмиссию, органы управления, систему подачи топлива, тормозную систему, электрическую систему, гидравлическую систему;
- АСУ ВАЗДСМ, состоящую из компонентов обнаружения (видеокамеры, радары, лидары, контроллеры, базовая станция навигации, датчики), блока управления (локальный пульт управления (УА 0-3), переносного пульта оператора (УА 3-5), диспетчерский пульт управления (УА 4-5), программного обеспечения.
5.3 Требования к исполнительным механизмам ВАЗДСМ
Требования и методики испытаний ИМ изложены в [1] и [2].
5.4 Требования к автоматизированной системе управления высокоавтоматизированной землеройной и дорожно-строительной машины
АСУ ВАЗДСМ состоит из подсистем, включающих различные элементы и компоненты информационно-технического обеспечения, указанные на рисунке 6, в зависимости от УА, изложенных в таблице 1.
Примечание - Структура и состав АСУ ВАЗДСМ представлены на рисунке 6.
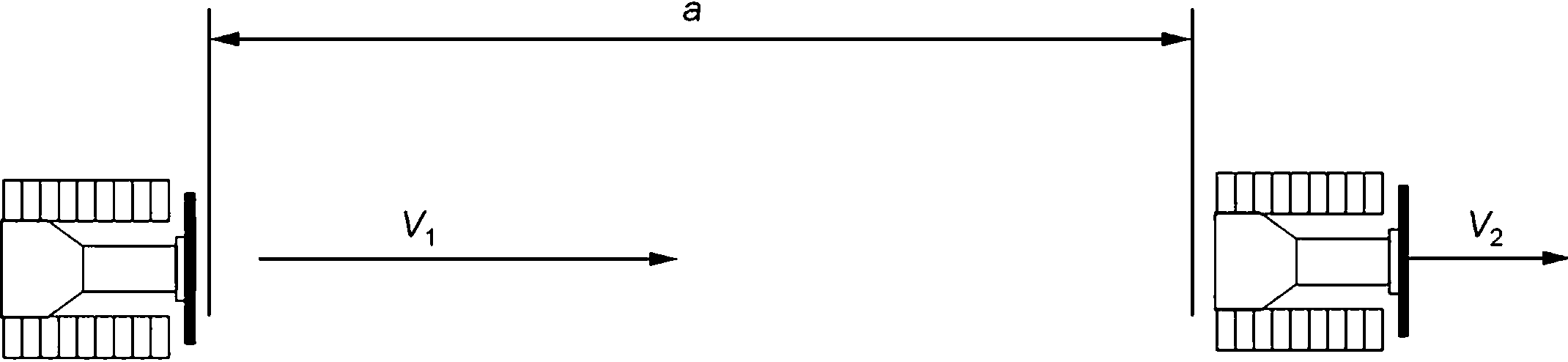 |
Рисунок 6 - Структура и состав автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машины
Описание и функционал некоторых подсистем АСУ ВАЗДСМ:
а) ПС обнаружения решает задачи идентификации ЦО с помощью КО и передачи информации от них в блок управления для дальнейшего распознавания;
б) ПС распознавания осуществляет идентификацию ЦО по информации, поступившей от подсистемы обнаружения ЦО, с целью распределения их типов на землеройную и дорожно-строительную технику, легковые и грузовые ТС, мотоциклистов, велосипедистов и пешеходов, здания и сооружения.
Примечание - ПС распознавания ВАЗДСМ конструктивно может быть объединена с ПС обнаружения ВАЗДСМ;
в) аналитическая ПС, основываясь на данных, полученных от ПС распознавания, определяет приоритетность предупреждений в соответствии с требуемой степенью предупреждения, исходя из данных при идентификации ЦО [определение направления, скорости приближения, расстояния до него (них) с учетом текущей скорости и направления движения объектов] и предоставляет соответствующую информацию ПС предупреждения;
г) ПС предупреждения о наличии ЦО включает в себя компоненты, позволяющие передавать предупреждения оператору ВАЗДСМ путем визуальных (световые индикаторы, текстовые и графические сообщения) при УА 3-5, звуковых (тональные и голосовые сообщения) при УА 3-5 и тактильных воздействий, передающихся через педали управления или сиденье водителя при УА 1-3;
д) ПС управления ВАЗДСМ предназначена для воздействия на ИМ ВАЗДСМ при осуществлении операций эксплуатационного задания по результатам работы бортовой системы и по сигналам аналитической ПС.
ВАЗДСМ при УА 3-5 должна оснащаться инерциальными датчиками углового положения.
Датчики углового положения должны быть установлены как на корпусе ВАЗДСМ, так и на всех рабочих органах для определения в пространстве себя и положении органов относительно корпуса, а также относительно горизонта.
Точность датчиков углового положения должна быть не менее чем ±0,1°.
ВАЗДСМ при УА 3-5 должна оснащаться высокоточным навигационным оборудованием, позволяющим определять местоположение ВАЗДСМ в плане с точностью не менее чем ±5 см на пересеченной местности и с точностью по высоте не менее чем ±4 см;
е) ПС диагностики осуществляет постоянный мониторинг состояния АСУ и ИМ ВАЗДСМ с целью выявления сбоев и неисправностей и информирует оператора об их появлении. В ВАЗДСМ УА 1-5 и в ВАЗДСМ УА 3, УА 4 ПС диагностики осуществляет мониторинг состояния оператора с целью определения его вовлеченности в процесс управления ВАЗДСМ;
ж) ПС авторизации осуществляет контроль права оператора, обслуживающего персонала на управление и (или) использование ВАЗДСМ УА 3-5, осуществляет внешнее информационное взаимодействие с серверами, а также идентификацию "свой-чужой" при выполнении эксплуатационного задания;
и) ПС коммуникаций осуществляет внешнее информационное взаимодействие с АСУ или с серверами навигационной системы, работающей в режиме реального времени, спутниками GPS/ГЛОНАСС, диспетчерским центром при управлении ВАЗДСМ в автономном режиме.
Примечание - Положение и киберзащищенность сетей и АСУ изложены в ГОСТ Р 56205;
к) ПО АСУ ВАЗДСМ должно обеспечивать пользовательские требования при выполнении заданных параметров управления в соответствии со степенью УА. Методы испытаний ПО определяют косвенными показателями работоспособности комплексов элементов информационно-телекоммуникационного оборудования при тестировании ВАЗДСМ в пределах требований выполнения рабочего задания.
Работоспособность АСУ посредством ПС обнаружения должна включать аспекты по распознаванию людей и ЦО в зоне обнаружения, осуществлять визуальное и (или) звуковое предупреждение(я) для оператора и (или) лица в зоне обнаружения, мониторинг и тестирование эксплуатационной надежности системы и совместимость с иными объектами выполнения задания и элементами инфраструктуры.
ВАЗДСМ должна оснащаться блоком сбора информации, к которому можно подключиться с использованием мобильного приложения по следующим каналам: Bluetooth, Wi-Fi, Интернет. Данное приложение должно отображать параметры всех датчиков, установленных на ВАЗДСМ, управляющие напряжения и токи в цепях управления, а также состояние ВАЗДСМ в реальном времени.
5.5 Система обеспечения безопасности оператора
5.5.1 Монитор
Монитор, независимо от УА, должен быть расположен на рабочем месте оператора в поле зрения оператора. Ограничение видимости оператора, рабочей зоны или рабочего оборудования машины должно быть сведено к минимуму.
Если монитор используют для отображения зоны позади машины, то система должна быть настроена на обеспечение обратного изображения на мониторе.
Чтобы видеть человека на максимальной границе зоны обнаружения, которая должна составлять не менее 250 м, монитор должен отображать пропорционально рост человека; размер изображения на мониторе должен быть равен 7 мм. Монитор должен находиться в пределах 1,2 м от точки глаз оператора. Монитор располагают таким образом, чтобы свести к минимуму блики, вызванные прямыми солнечными лучами.
Примечание - Факторы, влияющие на способность оператора обнаруживать человека на мониторе, зависят от положения монитора в кабине, расстояния от оператора до монитора, от размеров монитора, освещенности, объектива камеры, расстояния от объекта до объектива. Параметры расположения монитора должны соответствовать требованиям ГОСТ Р ИСО 3411.
5.5.2 Сигнальные устройства
Для ПС предупреждения применяют устройства СОБО. Эти устройства предоставляют данные оператору и содержат указания о состоянии ВАЗДСМ для рабочих и других лиц, присутствующих в зоне выполнения работ.
5.5.3 Звуковые сигнальные устройства
Устройство для предупредительной сигнализации СОБО на рабочем месте оператора должно быть или с заранее установленным, или с настраиваемым автоматически уровнем звука, превышающим, по крайней мере, на 3 дБ уровень окружающего шума, измеренным при максимальной управляемой скорости без нагрузки.
Все предупреждающие сигналы должны быть четко слышимы в кабине оператора. Предупреждающий сигнал должен быть в диапазоне частот 500-2500 Гц.
Аварийный сигнал на рабочем месте оператора должен быть отличим от других звуков в кабине (например, сигнала предупреждения или шума машины).
Примечание - Это может быть достигнуто путем изменения частотных и спектральных характеристик и временного распределения сигналов (см. ГОСТ ISO 9533).
5.5.4 Визуальные сигнальные устройства
Предупреждающие сигналы СОБО в кабине должны быть установлены в зоне прямой видимости оператора и быть видимыми при прямом солнечном свете. Предупреждающие сигналы должны быть отличимы от других видов предупреждений на приборной панели; наиболее значимые предупреждения должны быть обозначены мигающими короткими вспышками красного света.
Примечание - Характеристики визуальных сигнальных устройств должны соответствовать требованиям ГОСТ Р 57612.
5.5.5 Внешние устройства для предупреждения
Внешнее сигнальное устройство СОБО, установленное на ВАЗДСМ как часть ПС предупреждения, должно быть видимым для людей в зоне обнаружения ВАЗДСМ.
Примечание - Внешние сигналы тревоги должны соответствовать требованиям ГОСТ ISO 9533.
5.5.6 Активация системы и первоначальная проверка
Система должна активизироваться автоматически при запуске двигателя, выполнять начальное тестирование и давать надлежащие функциональные указания. Для визуальной вспомогательной системы индикацией правильного функционирования должно быть четкое изображение зоны обнаружения на экране монитора.
В случае неисправности ПС обнаружения ПС предупреждения должно известить об этом оператора РВАЗДСМ. ПС может войти в режим ожидания, пока выбирается соответствующий режим безопасного движения РВАЗДСМ.
Если установлено несколько камер или датчиков, то АСУ должна автоматически выбирать камеры или датчики, соответствующие направлению движения.
5.5.7 Обнаружение и время отклика
Обнаружение и время реагирования не должно превышать 300 мс после активизирования системы или после выхода из спящего режима.
Время обнаружения и время отклика системы - это время с момента выбора оператором нужного режима движения машины, в течение которого система не способна обнаружить человека.
5.6 Эксплуатационная пригодность компонентов обнаружения
5.6.1 Общие требования
Примечание - Эксплуатационная пригодность устройств ПС обнаружения и КО должны соответствовать требованиям ГОСТ ISO 15998 и ГОСТ ISO 13766.
5.6.2 Непрерывный самоконтроль
Наличие изображения зоны обнаружения на мониторе пульта оператора является достаточным для контроля за функционированием устройства КО.
ПС предупреждения должна иметь постоянно действующую функцию текущего контроля, включая основной световой индикатор - зеленый, резервный световой индикатор - мигающий желтый или зеленый, визуальный и (или) звуковой аварийный сигнал, если работа системы нарушена, в том числе контроль над каждым каналом связи ПС обнаружения и ПС предупреждения, который включает текущий контроль всех сигналов АСУ, используемых для работы системы [разрыв провода, короткое замыкание, время управления (если применяется), выходной и входной сигналы, проверка системы].
5.6.3 Системное ограничение
Должна быть предусмотрена невозможность блокировки устройства предупреждения простым отключением. Способ приведения в действие сигнального устройства должен быть таким, чтобы оператор не мог непреднамеренно повлиять на его надежную работу.
5.6.4 Окружающая среда и условия эксплуатации
Примечание - ПС обнаружения и КО должны соответствовать требованиям ГОСТ ISO 15998 в отношении окружающей среды и условий эксплуатации со следующими требованиями: температура - от минус 30°C до плюс 60°C; вибрация - 10 g в диапазоне 5-100 Гц (4,5 g для компонентов в кабине); ударная нагрузка - 10 g для внешних компонентов (4,5 g для компонентов в кабине).
5.6.5 Маркировка и идентификация
Каждое устройство должно иметь четкую и несмываемую маркировку со следующей информацией:
- производитель;
- тип/модель;
- изделие/серийный номер;
- необходимые маркировки в соответствии с требованиями.
5.6.6 Руководство по эксплуатации
КО ПС обнаружения и СОБО ПС предупреждения должны быть снабжены руководством по эксплуатации, содержащим положения технической инструкции и техники безопасности при использовании данных ПС:
- описание функций ПС;
- подробное описание характеристик и эксплуатационных ограничений, в частности влияние различных монтажных высот и углов;
- информацию об организации рабочего места;
- погодные ограничения;
- климатические ограничения;
- инструкции по обслуживанию;
- инструкции по установке и монтажу, включая монтаж на месте;
- инструкцию по включению;
- описания управления;
- инструкцию по безопасной эксплуатации;
- инструкцию по выполнению поверки;
- инструкции по действиям в случае нарушения нормальной работы;
- информацию для связи с другими компонентами (при необходимости);
- требования сертификации, например по электромагнитной и высокочастотной совместимости, а также соответствующие сертификационные испытания (если это требуется региональным регулирующим органом);
- страны, с которыми было достигнуто соглашение о признании одобрения типа средств измерений (если требуется);
- рекомендуемую процедуру для регулярного выполнения проверки ПС обнаружения и КО пользователем;
- требование к электрическому питанию.
5.7 Требования к расположению и монтажу компонентов
Компоненты АСУ должны быть расположены и установлены на ВАЗДСМ в соответствии со спецификацией и ТД изготовителя устройства так, чтобы они не ограничивали любую функцию или действие ВАЗДСМ, были защищены от внешних повреждений, предотвращалась возможность несанкционированного снижения эффективности или их демонтаж; ограничивалось воздействие или увеличение динамических нагрузок, температуры, ударов и вибрации, которые могут преждевременно привести к повреждению; расположение и надежность крепления компонентов подсистем АСУ не влияли на целостность защитных сооружений, например конструкции для защиты кабины оператора в случае опрокидывания ЗДСМ (ROPS); был обеспечен доступ для технического обслуживания с земли или специальной площадки.
5.8 Требования к компонентам автоматизированной системы управления высокоавтоматизированной землеройной и дорожно-строительной машины
Параметры факторов, воздействующих на компоненты АСУ РВАЗДСМ, не должны превышать критических значений, при которых:
- параметры повреждений машинных компонентов - выше средних;
- параметры степени нанесения вреда здоровью обслуживающего персонала - выше слабых (легких).
Требования к механическим факторам:
- синусоидальная вибрация частотой от 1 до 300 Гц с амплитудой ускорения 4g.
5.9 Электромагнитные требования
Компоненты АСУ РВАЗДСМ должны сохранять работоспособность при воздействии внешних электромагнитных помех со степенью жесткости не ниже третьей.
Примечание - Работоспособность компонентов АСУ ВАЗДСМ при воздействии внешних электромагнитных помех должна соответствовать требованиям, согласно разделам 3-5 ГОСТ Р 51317.2.4-2000, разделам 5, 6 ГОСТ 30804.4.3-2013.
Значения напряжения радиопомех и напряженности их поля, создаваемых модулями АСУ РВАЗДСМ УА 3-5, не должны превышать норм, установленных в разделах 5-7 ГОСТ 30805.22-2013.
Примечание - Тестирования норм и методов измерений проводят в соответствии с разделами 8-10 ГОСТ 30805.22-2013.
5.9.1 Степень защиты оболочек электроприводов элементов АСУ РВАЗДСМ и местного пульта управления должна быть не ниже IP 45 по разделам 5, 6 ГОСТ 14254-2015.
Примечание - Методы проверки защиты оболочек электроприводов должны проводиться в соответствии с разделом 11 ГОСТ 14254-2015. Значение электрического сопротивления изоляции должно быть установлено в ТД и соответствовать разделу 5 ГОСТ Р 52931-2008.
Методы испытаний электрического сопротивления проводят в соответствии с разделом 8 ГОСТ Р 52931-2008. Значение электрической прочности изоляции устанавливают в ТД на АСУ РВАЗДСМ УА 3-5 и испытывают в соответствии с ГОСТ Р 50571.16/МЭК 60364-6:2016.
Компоненты АСУ должны иметь световую сигнализацию о режимах работы. Параметры графического изображения должны соответствовать разделу 5 ГОСТ 12.4.026-2015.
5.9.2 Характеристики электронных индикаторов (ЭЛТ и др.):
- способы предоставления информации;
- размер (диаметр) экрана; диагональ;
- положение экрана по отношению к глазам оператора;
- углы установки индикаторов.
Сопряжение оператора с элементами пульта управления должно осуществляться по принципу взаимодополнения (взаимоусиления). Ошибки оператора не должны приводить к отказам РВАЗДСМ (аварийным ситуациям), которые могут им предупреждаться (прогнозироваться).
Структура и элементы информационной модели должны обеспечивать адекватное отображение состояния АСУ РВАЗДСМ и аварийной среды, соответствуя уровню сложности системы управления образца.
Примечание - Определения даны на основе ГОСТ Р 70852.
6 Требования эргономики и технической эстетики
Требования эргономики и технической эстетики устанавливают согласно перечню характеристик рабочих мест управления и обслуживания РВАЗДСМ персоналом (операторами) и средств защиты (пульта управления, информационной модели и процессов управления, средств отображения информации, органов управления), условий комфортности на рабочих местах (температуры среды, освещенности, уровня шумов, вибрации), характеристик взаимодействия обслуживающего персонала (оператора) с техникой (безошибочности работы оператора при выполнении алгоритма управления, точности управляющих действий оператора).
Кодирование и компоновка средств отображения информации, органов управления на пультах и компоновка рабочих мест должны обеспечивать безошибочность и быстрое действие операторов, удобство и безопасность работы в условиях ЧС.
Конструкция и кодирование индикаторов и органов управления для их совместного использования должны учитывать сложившиеся стереотипы поведения человека-оператора (реакция на принимаемые сигналы).
Для органов управления в форме рукоятки управления манипулятором значение передаточного числа (отношение перемещения рукоятки к перемещению управляемого объекта) должно соответствовать необходимым скорости и точности наведения манипулятора.
Переносной пульт управления должен обладать рамкой безопасности, обеспечивающей гарантированную защиту от воздействия на органы управления в случае падения пульта.
Переносной пульт управления должен обеспечивать возможность непрерывной работы в течение 8 ч без замены аккумуляторных батарей.
Вес переносного пульта управления не должен превышать 3 кг.
Для использования переносного пульта управления должна быть предусмотрена возможность крепления ремня или кирасы.
Индикация на переносном пульте управления должна иметь минимальный набор отображаемых параметров, таких как:
- наличие ошибки в системе управления;
- режим работы дополнительного оборудования (при наличии);
- наличие связи с ВАЗДСМ;
- низкий уровень топлива;
- низкий заряд АКБ ПДУ.
Примечание - Общие требования, характеризующие приспособленность техники к человеку, устанавливают в соответствии с разделом 2 ГОСТ 20.39.108-85.
6.1 Требования к маркировке
В зоне визуального доступа должна быть установлена маркировочная пластинка по требованиям ГОСТ 12969 и ГОСТ 12971.
Сведения о продукции, отображаемые на изделии и поясняющие порядок его применения, правила безопасности и назначение функциональных деталей должны быть исполнены на русском языке.
Примечание - Маркировка компонентов АСУ РВАЗДСМ должна соответствовать требованиям ГОСТ 2.314 и ГОСТ 33990.
6.2 Требования к технологичности
Технология производства конструкции изделия должна обеспечивать:
- удобство технического обслуживания и ремонта;
- заданную надежность и восстановление работоспособности РВАЗДСМ в условиях эксплуатации.
Блочно-модульный принцип при конструировании РВАЗДСМ должен дополняться максимально возможным уровнем стандартизации и унификации сборочных единиц и деталей.
Примечание - Общие правила обеспечения технологичности должны быть выполнены по ГОСТ 14.201.
6.3 Требования безопасности
Конструкция РВАЗДСМ должна исключать:
- ошибочные действия обслуживающего персонала при управлении;
- несрабатывание блокировок оборудования, сбои в работе;
- отсутствие у операторов четкой и полной информации о состоянии РВАЗДСМ и месте выполнения работ.
Конструктивное исполнение РВАЗДСМ, применяемые материалы, смазки, масла и т.п. при воздействии поражающих и других факторов опасной ситуации должны исключать возможность:
- образования очагов возгорания (в том числе искрообразования) и взрывчатых смесей;
- появления электрического напряжения на органах управления и других частях РВАЗДСМ;
- возникновения источников внутреннего ионизирующего излучения с параметрами, превышающими предельно допустимые нормы;
- внезапного появления в воздушной среде рабочей зоны обслуживающего персонала паров АХОВ.
В конструкции РВАЗДСМ должны быть средства, обеспечивающие остановку исполнительных устройств при выходе ЗДСМ за пределы установленного рабочего пространства.
Подсистема предупреждения должна иметь устройства аварийного останова при нарушении работоспособности РВАЗДСМ, ведущем к возникновению аварийной ситуации (в том числе при внезапном отключении питания).
Примечание - Общие правила обеспечения безопасности должны быть выполнены в соответствии с ГОСТ 12.1.007 и ГОСТ Р 12.1.009.
6.4 Требования к подсистеме предупреждения
Назначение системы предупреждения заключается в подаче звукового, визуального или тактильного предупредительного сигнала в случае обнаружения препятствия в предупредительной зоне и отключении всех высокоавтоматизированных функций. Машина при этом должна перейти в свое заданное безопасное состояние (функции движения и работы) в случае обнаружения препятствия в зоне опасности.
Значения индикаторов (обозначений), а также все требуемые действия должны быть описаны в руководстве оператора.
6.4.1 Сигнал аудиопредупреждения
Максимальная частота повторения не должна превышать 2 Гц. Интервал включения предупредительного сигнала должен быть равен интервалу отключения предупредительного сигнала в пределах 20%.
Должна быть обеспечена диагностика АСУ (например, функциональная проверка при запуске). В случае неисправности звуковых предупредительных сигналов оператор должен быть оповещен о неисправности, а возможность дальнейшей высокоавтоматизированной работы должна быть исключена до устранения неисправности.
Примечание - Частотные характеристики предупредительного аудиосигнала должны соответствовать требованиям раздела 6 ГОСТ Р ИСО 7731.
6.4.2 Визуальный сигнал предупреждения
Визуальный предупредительный сигнал, воспринимаемый людьми, находящимися рядом с ВАЗДСМ, должен подаваться непрерывно в случае выбора высокоавтоматизированной работы.
Следующие режимы эксплуатации и состояния ВАЗДСМ должны обозначаться визуально на всех позициях управления оператором:
- выбрана высокоавтоматизированная работа (желтый);
- высокоавтоматизированная работа приостановлена после обнаружения объекта или неисправности (зеленый);
- ручное управление удаленного оператора (зеленый);
- запущен режим ошибки (красный).
При остановке высокоавтоматизированной работы вследствие обнаружения объекта или неисправности должны быть поданы соответствующие дополнительные предупреждения для указания причины.
Для визуальных предупреждений и индикаторов должна быть обеспечена диагностика (например, функциональная проверка при запуске).
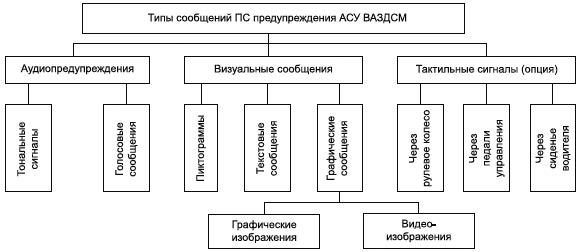 |
Рисунок 7 - Типы сообщений подсистемы предупреждения для оператора ВАЗДСМ УА 0-5
Примечание - Параметры графического изображения должны соответствовать разделу 5 ГОСТ 12.4.026-2015.
Все виды безопасности должны быть работоспособны в течение всего срока службы ВАЗДСМ.
Примечание - Конструкция ВАЗДСМ должна обеспечивать требования по электробезопасности в соответствии с ГОСТ Р 12.1.009; требования по пожаробезопасности в соответствии с ГОСТ 12.1.004; требования по взрывобезопасности в соответствии с ГОСТ 12.1.010; требования по безопасности от воздействия аварийно-химически опасных веществ (ГСМ, удобрения и т.д.) в соответствии с ГОСТ 12.1.007; требования по безопасности обслуживания ВАЗДСМ в соответствии с требованиями ГОСТ 12.2.011. Определения даны на основе ГОСТ Р 70852.
7 Требования к сырью, материалам, комплектующим изделиям
Комплектующие (покупные) изделия должны быть сертифицированными и удовлетворять техническим требованиям ТД, предъявляемым к АСУ РВАЗДСМ.
7.1 Комплектность
РВАЗДСМ и технологическое оборудование к ним поставляют потребителю в комплекте, к которому прилагаются:
- сменное рабочее оборудование и инструмент;
- запасные части и принадлежности;
- документация: формуляр (паспорт), техническое описание, инструкция по эксплуатации и комплектации.
7.2 Упаковка
Комплекты аппаратуры АСУ РВАЗДСМ должны поставляться в транспортной упаковке.
Примечание - Эксплуатационная и сопроводительная документация должна быть упакована в соответствии с ГОСТ Р 2.601. Варианты упаковки и требования к таре должны соответствовать требованиям ГОСТ 23170.
8 Условия испытаний
Последовательность проведения испытаний АСУ РВАЗДСМ в режиме:
- входного контроля;
- статическом;
- холостого хода;
- рабочем.
В пределах режима входного контроля последовательность испытаний не регламентируется.
8.1 Последовательность испытаний и проверок
Необходимо провести верификацию и валидацию требований по безопасности и защитных мер или мер по снижению риска.
Общие правила тестирования в испытательной лаборатории должны соответствовать требованиям ГОСТ ISO/IEC 17025.
Общие требования к компетентности испытательных и калибровочных лабораторий. Методы верификации и валидации ГОСТ Р ИСО 13849-1 должны применяться к комплексу АСУ ВАЗДСМ.
До валидации конструкции части системы управления, связанной с безопасностью (SRP/CS), или комбинации SRP/CS, обеспечивающей функцию безопасности, спецификация с требованиями к функции безопасности должна быть верифицирована с целью обеспечения пригодности и комплектности для использования по назначению. Соблюдение принципов проектирования и корректность информации по использованию данного стандарта должны быть верифицированы в соответствии с одним или несколькими следующими методами при необходимости с учетом любых подходящих стандартов для компонентов или конкретных машин, указанных в таблице 2.
Таблица 2 - Этапы и методы испытаний подсистем АПК
Этапы испытаний | Испытания и проверки |
1 В режиме входного контроля | 1.1 Проверка соответствия объема данных, содержащихся в предоставляемой ТД, объему требований настоящего стандарта |
1.2 Проверка наличия клемм, знаков заземления и надписей на элементах АСУ РВАЗДСМ | |
1.3 Проверка комплектности АСУ РВАЗДСМ | |
1.4 Проверка маркировки элементов АСУ РВАЗДСМ | |
1.5 Проверка габаритных и присоединительных размеров блоков, монтажных посадочных соединений навесного оборудования, длины кабельных линий | |
1.6 Проверка эргономических требований к элементам АСУ РВАЗДСМ | |
1.7 Проверка окраски элементов АСУ РВАЗДСМ | |
2 В статическом | 2.1 Испытания на устойчивость к климатическим воздействиям |
режиме | 2.2 Проверка стыковочных соединений кабельных линий |
2.3 Испытания изоляции соединительных кабелей линий на электрическую прочность | |
2.4 Испытания изоляции соединительных кабельных линий на электрическое сопротивление | |
2.5 Проверка каналов связи с внешним оборудованием | |
2.6 Проверка работоспособности средств защиты АСУ РВАЗДСМ от ошибочных действий оператора | |
2.7 Испытания на электромагнитную совместимость и помехоустойчивость | |
3 В режиме | 3.1 Проверка каналов системы телеуправления АСУ РВАЗДСМ |
холостого хода | 3.2 Проверка возможности одновременного движения собственно манипулятора |
3.3 Проверка подвижности НО от ПУ | |
3.4 Проверка возможности управления видеосистемы АСУ РВАЗДСМ от ПУ | |
3.5 Проверка предельной дальности телеуправления НО | |
3.6 Проверка предельной дальности надежной связи видеосистемы | |
3.7 Проверка сервисных функций, реализуемых на АСУ РВАЗДСМ с ПУ | |
3.8 Проверка приоритетов управления | |
3.9 Проверка работоспособности сигнализации о режимах работы элементов АСУ РВАЗДСМ | |
4 В рабочем | 4.1 Проверка продолжительности непрерывной работы АСУ РВАЗДСМ |
режиме | 4.2 Проверка работоспособности АСУ РВАЗДСМ в диапазоне напряжений питания |
4.3 Проверка потребляемой мощности |
Сертификационные испытания проводят для установления соответствия характеристик АПК РВАЗДСМ нормативным требованиям и ТД.
Объем приемо-сдаточных, периодических, квалификационных, типовых испытаний и испытаний на надежность устанавливается в ТД и технических регламентах, объем сертификационных испытаний - в стандартах на составные части и компоненты АСУ РВАЗДСМ.
Все АСУ РВАЗДСМ, предоставленные на испытания, должны быть приняты службой технического контроля предприятия-изготовителя в соответствии с требованиями ТД на это изделие.
Результаты испытаний считают удовлетворительными, если предъявленные на испытания ВАЗДСМ соответствуют требованиям технических регламентов и ТД на них.
При несоответствии любого ВАЗДСМ хотя бы одному из требований настоящего стандарта или ТД на него выявляют причины, вызвавшие отказ. После устранения отказов проводят повторные проверки.
При повторном обнаружении неисправности в АПК РВАЗДСМ считают не прошедшим испытания.
8.2 Методы испытаний
8.2.1 Испытания в режиме входного контроля
Все элементы АСУ РВАЗДСМ, подлежащие испытаниям, должны быть проверены на отсутствие очевидных дефектов.
Проверяют:
- соответствие объема данных, содержащихся в представленной ТД, требованиям настоящего стандарта;
- комплектность поставки материальной части на испытания и маркировку;
- габаритные и присоединительные размеры блоков и монтажных посадочных соединений навесного оборудования;
- соответствие эргономическим требованиям;
- цветографическую окраску.
Примечание - Эргономические характеристики элементов РВАЗДСМ проверяют на соответствие требованиям ГОСТ 22614.
8.2.2 Испытания в статическом режиме (при неработающей силовой установке РВАЗДСМ и неподвижном РВАЗДСМ)
Устойчивость элементов РВАЗДСМ, в том числе АСУ, к климатическим воздействиям проверяют в климатических камерах, при этом устройство должно находиться в обесточенном состоянии.
Примечание - Климатические испытания крупногабаритных РВАЗДСМ, для которых нет стандартных климатических камер, проводят по ГОСТ Р 52931 (как для крупногабаритных изделий).
Испытания на холодо- и теплоустойчивость осуществляют при температуре в соответствии с исполнением и категорией по ГОСТ Р 52931 (теплоустойчивость - не ниже 40°C).
РВАЗДСМ выдерживают при одной из соответствующих температур в течение 2 ч, затем - в нормальных климатических условиях в течение 2 ч, после чего цикл повторяют при другой температуре. Механические повреждения комплектующих изделий не допускаются.
Испытательное оборудование и методы испытаний элементов АСУ должны соответствовать действующим нормативным документам. В процессе испытаний пульты управления РВАЗДСМ должны быть включены. Если во время испытаний отсутствуют ложные срабатывания, а измеренные напряжения помех и напряженность поля радиопомех не превышают установленных значений, то РВАЗДСМ считают выдержавшим испытания.
Качество стыковочных соединений кабельных линий оценивают степенью затяжки соответствующих штуцеров и разъемов.
Электрическую прочность изоляции проверяют в соответствии с ГОСТ Р 52931. Для испытания используют генератор, обеспечивающий синусоидальное напряжение частотой от 40 до 60 Гц с перестраиваемой амплитудой от 0 до 1500 В.
Заземление корпуса пульта управления АСУ РВАЗДСМ (при его наличии) должно быть убрано. Если корпус выполнен из неэлектропроводящего материала, то пульт управления РВАЗДСМ закрепляют с помощью собственных элементов крепления на металлической пластине.
Испытательное напряжение прикладывают между:
- корпусом пульта управления РВАЗДСМ (или металлической пластиной) и соединенными вместе цепями электропитания и управления;
- соединенными вместе цепями электропитания и соединенными вместе цепями управления (если данные цепи гальванически не связаны).
Порядок испытаний:
В процессе испытания не должно возникать пробоя изоляции.
Сопротивление изоляции измеряют в соответствии с ГОСТ Р 52931. Заземление корпуса пульта управления АСУ РВАЗДСМ (при его наличии) должно быть убрано. Если корпус выполнен из неэлектропроводящего материала, то пульт управления РВАЗДСМ закрепляют с помощью собственных элементов крепления на металлической пластине.
Сопротивление изоляции измеряют постоянным напряжением от 100 до 250 В, прикладываемым к цепям не менее чем через 60 с после его приложения.
Число каналов связи с внешним оборудованием определяют сравнением выходных и входных сигналов (дискретных и (или) аналоговых) АСУ РВАЗДСМ, представленных в ТД, с их реальным количеством, указанным на ДПУ испытуемого изделия.
Работоспособность средств защиты АСУ РВАЗДСМ от ошибок оператора проверяют в соответствии с ТД на конкретное РВАЗДСМ. Число проверок по каждому виду испытаний должно быть не менее трех. Отказы в работе не допускаются.
8.2.3 Испытания в режиме холостого хода (при работающей силовой установке РВАЗДСМ и неподвижном шасси)
Количество каналов системы телеуправления РВАЗДСМ определяют сравнением данных, представленных в ТД, с реальным числом указанных каналов на ДПУ испытуемого изделия.
Оценку предельной дальности телеуправления РВАЗДСМ и НО (инженерного вооружения, приводов оборудования, средств разведки опасных факторов в рабочей зоне РВАЗДСМ и т.д.) осуществляют с помощью ПУ на предельных дальностях в соответствии с ТД на конкретный вид РВАЗДСМ.
Испытания проводят на открытом слабопересеченном участке местности в отсутствие преднамеренных электромагнитных помех.
Оператор с ПУ отходит от РВАЗДСМ до тех пор, пока РВАЗДСМ и (или) НО не перестанет функционировать вследствие потери сигнала управления. Прекращение приема на ПУ телеметрической информации и информации о приеме и выполнении на РВАЗДСМ команд оператора, передаваемых с РВАЗДСМ и (или) НО, также считается прекращением функционирования РВАЗДСМ и (или) НО. По достижении предельной дальности измеряется расстояние от ПУ до РВАЗДСМ, которые должно составлять не менее 500 м.
Критерием положительной оценки является визуальное подтверждение приведения элементов, НО в движение на предельных дальностях в соответствии с требованиями ТД.
Оценку предельной дальности надежной связи видеосистемы осуществляют с помощью ПУ в соответствии с ТД для конкретного вида РВАЗДСМ. Испытания проводят по критерию прекращения получения сигналов изображения с РВАЗДСМ и (или) НО.
Критерием положительной оценки является визуальное подтверждение приведения элементов видеосистемы в движение на предельных дальностях в соответствии с требованиями ТД.
Проверку функций управления, реализуемых на АСУ ВАЗДСМ с МПУ и ДПУ, осуществляют согласно ТД на данный тип ВАЗДСМ. Критерием положительной оценки испытания является появление выходных сигналов, соответствующих планируемым действиям.
Последовательность управления элементами АСУ ВАЗДСМ (ручное, управление с МПУ и ДПУ) проверяют в соответствии с требованиями ТД. Количество испытаний для каждой степени подвижности элемента - не менее четырех (по два в каждом из противоположных направлений движения). За результат испытаний принимают среднее арифметическое типовых измерений.
Работоспособность сигнализации о режимах работы элементов РВАЗДСМ, в том числе НО, проверяют с помощью визуальных наблюдений срабатывания элемента сигнализации при включении соответствующих органов.
8.2.4 Испытания в рабочем режиме (при работающей силовой установке и подвижном шасси)
Испытания АСУ РВАЗДСМ на продолжительность непрерывной работы проводят в составе РВАЗДСМ под имитационной нагрузкой. Время испытаний должно составлять не менее 6 ч, из них не менее 2 ч - работа при максимальной интенсивности выполнения задания.
Проверка АСУ, в соответствии с УА 1-5, осуществляется при тестировании подсистем на соблюдение нормативов работоспособности, заложенных в [2], [5] и ТД на ВАЗДСМ.
8.3 Тестирование на управление РВАЗДСМ по заданной траектории движения
Поверхность площадки должна иметь твердое покрытие, обеспечивающее необходимое сцепление шин и невозможность ее разрушения шинами при повороте ЗДСМ, а также должна быть сухой; уклон испытательной площадки в любом направлении не должен превышать 3%.
8.4 Тест на управляемость по заданной траектории:
- движение по кромке с заданной точностью (прямой и задний ход машины);
- прямолинейное движение (прямой и задний ход машины);
- авторазворот (прямой и задний ход машины);
- автоматическая парковка;
- дистанционное управление скоростью.
Таблица 3 - Минимальные размеры зоны движения ВАЗДСМ по криволинейной траектории
В метрах | ||||
Название | Длина рабочей зоны | Ширина рабочей зоны, не менее | Длина зоны парковки, не менее | Длина зоны разворота, не менее |
Зона криволинейного движения | 20 | 16 | 5 | 8 |
 |
P - зона парковки
Рисунок 8 - Схема движения РВАЗДСМ при осуществлении тестов на управляемость по заданной траектории
8.5 Тест на управляемость в групповом режиме по зигзагообразной схеме:
- навигация с заданными параметрами точности для реализации параллельных проходок;
- прямолинейное движение с заданной точностью до назначенной точки;
- прямолинейное движение под углом к оси рабочего хода задним ходом;
- движение со вторым движущимся ЦО.
Таблица 4 - Минимальные размеры зоны группового движения
В метрах | |||
Название | Длина рабочей зоны | Ширина рабочей зоны, не менее | Длина зоны парковки, не менее |
Зона зигзагообразного движения | 32 | 20 | 4,5 |
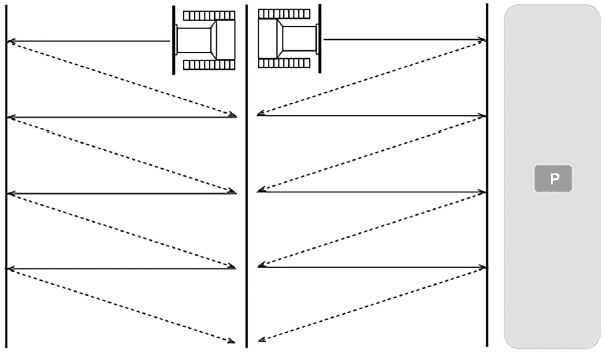 |
P - зона парковки
Рисунок 9 - Схема движения РВАЗДСМ гусеничного или колесного типа и ЦО при осуществлении тестов на управляемость при групповом движении
8.6 Тест систем управления в смешанном режиме:
- групповая работа в смешанном парке;
- остановка перед препятствием;
- автоматический выбор скорости;
- объезд препятствия;
- авторазворот.
Таблица 5 - Размеры зоны тестирования систем управления в смешанном режиме
В метрах | ||||
Название | Длина рабочей зоны | Ширина рабочей зоны, не менее | Длина зоны парковки, не менее | Длина зоны разворота, не менее |
Зона последовательно-кольцевого движения | 90 | 34 | 16 | 12 |
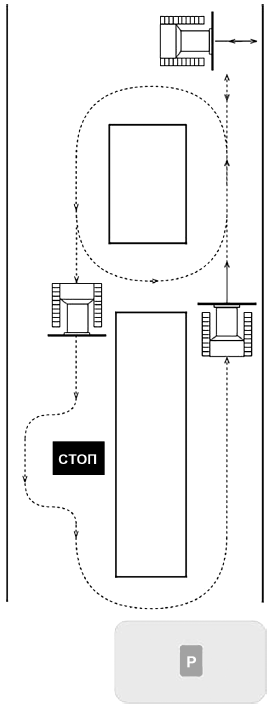 |
P - зона парковки
Рисунок 10 - Схема движения РВАЗДСМ гусеничного или колесного типа и ЦО при осуществлении тестов на управляемость при движении в смешанном режиме
8.7 Тест АСУ высокоавтоматизированной землеройной и дорожно-строительной машины при объезде препятствия
Виды препятствий перечислены в приложении Г.
Таблица 6 - Размеры зоны объезда препятствий
В метрах | ||
Название | Длина рабочей зоны, не менее | Ширина рабочей зоны, не менее |
Зона объезда препятствий | 9 | 3 |
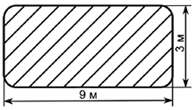 |
Рисунок 11 - Зона объезда препятствий
Метрические параметры предлагаемых форм искусственного полигона определены аналитическим путем, исходя из обеспечения безопасного коридора при проведении тестирования на выполнение задач безопасного управления ВАЗДСМ без агрегатирования прицепными машинами и агрегатами.
Примечание - Методика испытаний на оценку управляемости и опережающего экстренного торможения приведены в приложениях А и Б. Виды препятствий перечислены в приложении Г. Методики испытаний компонентов подсистем АСУ при УА 3-5 приведены в приложении В.
Приложение А
(обязательное)
Методика оценки управляемости
А.1 Поверхность площадки должна иметь твердое покрытие, обеспечивающее необходимое сцепление и невозможность ее разрушения при повороте ЗДСМ, а также должна быть сухой и твердой; уклон площадки в любом направлении не должен превышать 3%.
Примечание - Методика оценки управляемости разработана в соответствии с ГОСТ ISO 5010.
А.2 Тестирование проводится для оценки управляемости ВАЗДСМ УА 0-5:
- с исправным механизмом управления и АСУ - по траектории 1, приведенной на рисунке А.1, и в таблице А.1, имеющей протяженность, равную пути, проходимому РВАЗДСМ за 10 с;
- с исправным механизмом управления в аварийном состоянии - по траектории 1, приведенной на рисунке А.2, и в таблице А.2, имеющей протяженность, равную пути, проходимому РВАЗДСМ за 30 с.
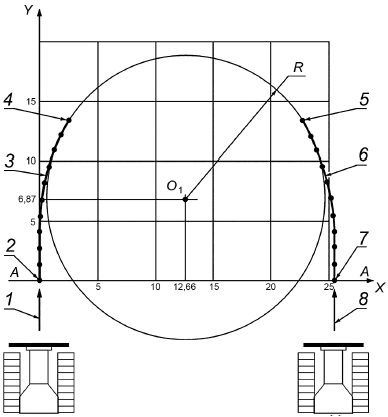 |
1, 8 - направление движения РВАЗДСМ гусеничного или колесного типа перед выездом на траекторию; 2, 7 - стартовые точки движения по траекториям; 3 - траектория поворота РВАЗДСМ направо; 4, 5 - финишные точки движения по траекториям; 6 - траектория поворота РВАЗДСМ налево; AA - стартовая линия
Рисунок А.1 - Траектории движения РВАЗДСМ с исправным механизмом управления и АСУ (время движения - 10 с)
Таблица А.1 - Данные траектории движения РВАЗДСМ с исправным механизмом управления и АСУ
В метрах | |||
У | X (поворот направо) | X (поворот налево) | Примечание |
0,00 | 0,00 | 25,33 | Стартовая точка |
1,39 | 0,003 | 25,32 | - |
2,78 | 0,02 | 25,30 | - |
4,17 | 0,07 | 25,25 | - |
5,56 | 0,17 | 25,15 | - |
6,93 | 0,33 | 24,99 | - |
8,30 | 0,58 | 24,75 | - |
9,64 | 0,91 | 24,41 | - |
10,96 | 1,36 | 23,97 | - |
12,23 | 1,92 | 23,40 | - |
13,43 | 2,62 | 22,71 | Финишная точка |
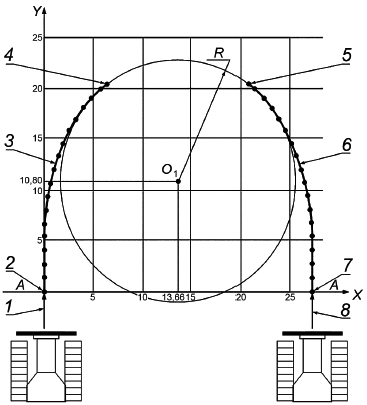 |
1, 8 - направление движения РВАЗДСМ гусеничного или колесного типа перед выездом на траекторию; 2, 7 - стартовые точки движения по траекториям; 3 - траектория поворота РВАЗДСМ направо; 4, 5 - финишные точки движения по траекториям; 6 - траектория поворота РВАЗДСМ налево; AA - стартовая линия
Рисунок А.2 - Траектории движения РВАЗДСМ с управлением в аварийном состоянии (время движения 30 с)
Таблица А.2 - Данные траектории движения РВАЗДСМ с управлением в аварийном состоянии
В метрах | |||
У, м | X (поворот направо) | X (поворот налево) | Примечание |
0,00 | 0,00 | 27,33 | Стартовая точка |
1,35 | 0,002 | 27,325 | - |
2,70 | 0,01 | 27,31 | - |
4,05 | 0,04 | 27,29 | - |
5,40 | 0,1 | 27,23 | - |
6,75 | 0,19 | 27,13 | - |
8,09 | 0,33 | 27,00 | - |
9,42 | 0,53 | 26,80 | - |
10,75 | 0,79 | 26,54 | - |
12,06 | 1,12 | 26,21 | - |
13,34 | 1,53 | 25,80 | - |
14,6 | 2,02 | 25,31 | - |
15,81 | 2,61 | 24,72 | - |
16,97 | 3,30 | 24,03 | - |
18,07 | 4,09 | 23,24 | - |
19,09 | 4,98 | 22,35 | - |
20,01 | 5,96 | 21,36 | - |
20,39 | 6,45 | 20,88 | Финишная точка |
А.3 РВАЗДСМ должен двигаться со скоростью (5±0,5) км/ч по траекториям, указанным на рисунках 1 и 2, при повороте направо - левым передним колесом или левой гусеницей, при повороте налево - правым передним колесом или правой гусеницей. Перед выездом на траекторию объект испытания должен иметь указанную скорость и положение, соответствующее прямолинейному движению.
А.4 Измерения начинают с момента пересечения РВАЗДСМ линии АА и заканчивают в момент достижения передними колесами или передней частью гусениц точки сопряжения с окружностью радиусом, который равен удвоенному значению длины испытуемой машины, а в случае с погрузчиком необходимо также учесть угол складывания полурам.
А.5 Все измерения следует проводить не менее трех раз при повороте РВАЗДСМ как направо, так и налево. Контроль над фактической траекторией движения РВАЗДСМ и за отклонением ее от траектории, обозначенной разметкой, следует осуществлять по следу маркировочного устройства.
А.6 Управляемость РВАЗДСМ оценивается выполнением требований к АСУ при ВАЗДСМ АУ 3-5, в том числе усилием на органе рулевого управления при движении РВАЗДСМ АУ 0-2.
А.7 Для ВАЗДСМ УА 3-5, критерием оценки управляемости служит погрешность отклонения от заданного движения и время выполнения маневра.
Приложение Б
(обязательное)
Методика испытаний автоматизированной системы управления на выполнение операции опережающего экстренного торможения посредством активации подсистем
В активном состоянии подсистемы АСУ ВАЗДСМ УА 3-5 должны осуществлять мониторинг обстановки в зоне рабочей площадки, обнаруживать ЦО в зоне контроля ВАЗДСМ, при выполнении требований к предупреждению - предупреждать оператора о препятствиях, создаваемых ими для выполнения движения и заданных операций РВАЗДСМ, а при отсутствии реакции оператора (при УА 3) и самой АСУ (при УА 4, 5) - обусловлено перейти в безопасное состояние (экстренное торможение).
Примечание - Методика разработана в соответствии с ГОСТ Р 58839.
В состоянии предупреждения ПС АСУ активна и должна информировать оператора ВАЗДСМ с помощью визуальных, звуковых и тактильных сигналов об обнаруженных ПС обнаружения ЦО, для которых выполняются требования к предупреждению.
Требования к предупреждению выполняются, если:
а) ПС распознавания и ПС обнаружения АСУ выявили превышение оператором ВАЗДСМ или скорости, необходимой для исключения вероятности возникновения опасной ситуации с ЦО, находящимся в зоне предупреждения на траектории заданного движения;
б) ПС предупреждения АСУ выявила намерение или действие оператора ВАЗДСМ или АСУ (при УА 4, 5) по движению в направлении, способном вызвать опасность для движения, связанную с обнаруженным(и) в зоне предупреждения ЦО, и не выявила действий водителя по изменению скорости или направления движения.
Б.1 Приоритетность сообщений в состоянии предупреждения
При одновременном обнаружении нескольких ЦО в зоне контроля аналитическая ПС АСУ должна классифицировать данные объекты по приоритетности. Предупреждение должно выдаваться водителю ВАЗДСМ о том ЦО, ВДС с которым согласно расчету аналитической подсистемы меньше.
При обнаружении нескольких ЦО с одинаковой приоритетностью аналитическая ПС должна выдавать соответствующие команды СОБО ПС предупреждения о них в замкнутом цикле с минимальной длительностью отображения одного сообщения не менее 2 с вплоть до их исчезновения из зоны предупреждения.
Б.2 Состояние экстренного торможения
При выполнении критерия активации торможения АСУ, посредством ПС обнаружения и распознавания, воздействует на ИМ, посредством ПС управления, для замедления ВАЗДСМ вплоть до ее остановки. Критерий активации торможения выполняется, если ПС обнаружения АСУ выявила ЦО, находящийся в зоне торможения, расстояние до которого уменьшается, предупредила о нем оператора или АСУ (при АУ 4, 5), действий по снижению скорости или изменению направления движения ВАЗДСМ в течение 0,8 с не последовало.
Б.3 Критерии активации АСУ
При активации АСУ все ПС должны перейти в активное состояние. Несколько критериев активации могут использоваться одновременно в зависимости от окружающей обстановки. Потенциальные критерии активации включают, но не ограничиваются следующими:
- АСУ может быть активна непрерывно (при включенном зажигании ВАЗДСМ и отсутствии сбоев и неисправностей ПС АСУ);
- активация АСУ может осуществляться выявлением ЦО в зоне контроля ПС предупреждения;
Таблица Б.1 - Требования к дальности обнаружения целевых объектов фронтальными радарами
Угол обзора по азимуту | Землеройная, дорожно-строительная техника (ЭПР 40 м ) | Пешеход (ЭПР 0,2 м ) |
±15° | 50 | 30 |
±55° | 20 | 15 |
Примечание - Требования к параметрам дальности обнаружения ЦО радарами приведены в таблице Б.1.
Таблица Б.2 - Требования к дальности обнаружения целевых объектов боковыми радарами
Угол обзора по азимуту | Бульдозер, погрузчик, самоходная специальная техника (ЭПР 40 м ) | Пешеход (ЭПР 0,2 м ) |
±55° | 20 | 20 |
В программах испытаний могут быть предусмотрены определенные цвета для визуальных предупреждений и индикаторов в соответствии с разделом 5 ГОСТ 12.4.026-2015.
ПС АСУ должны осуществлять функции при выполнении операции опережающего экстренного торможения ВАЗДСМ УА 3-5 согласно структуре АСУ на рисунке Б.1.
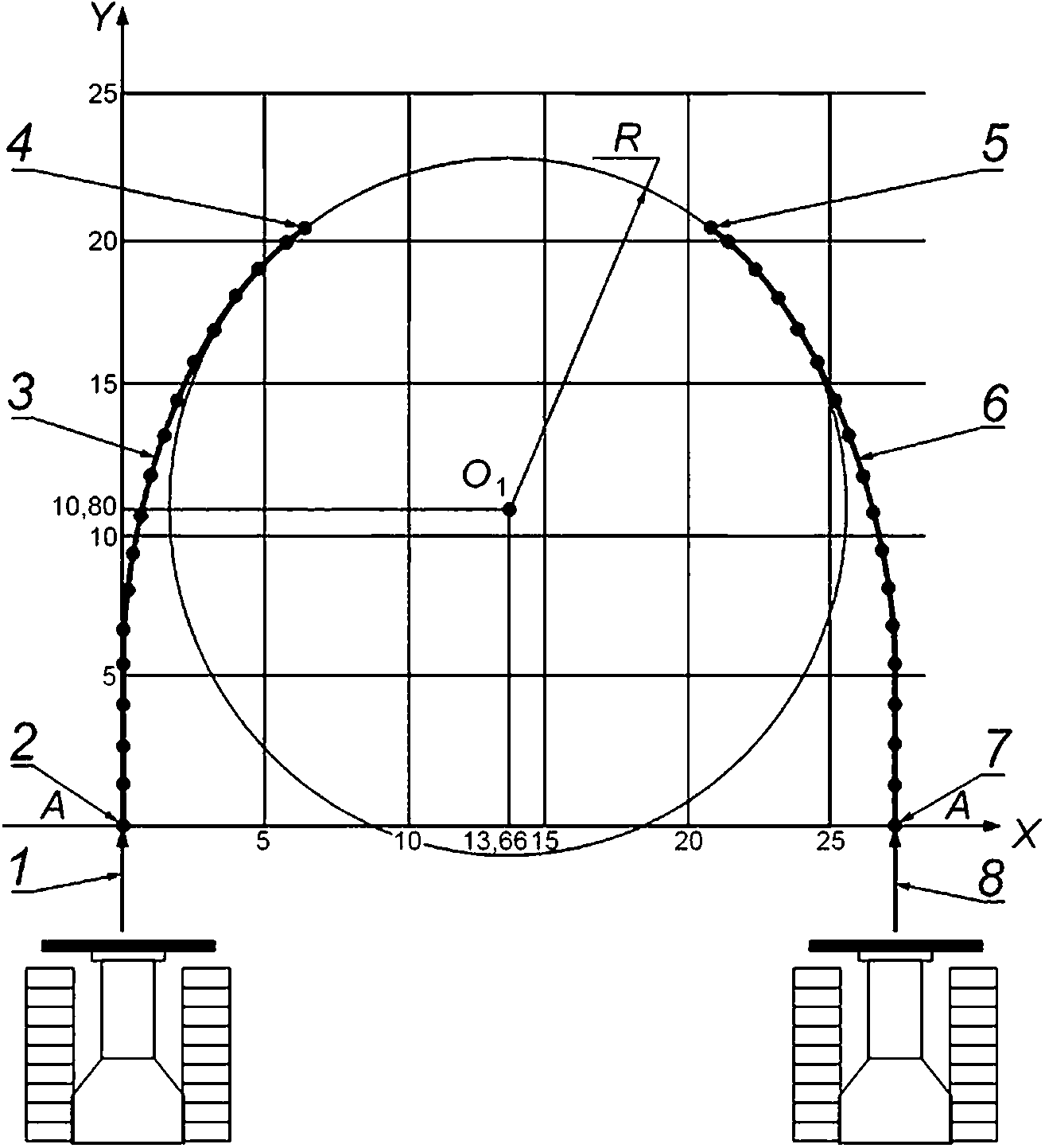 |
Рисунок Б.1 - Функции ПО АСУ при выполнении операции опережающего экстренного торможения ВАЗДСМ УА 3-5
Б.4 Испытания на предупреждение о наличии ЦО и торможение. Значение для верификации данных при тестировании РВАЗДСМ
Б.4.1 Общие сведения о методике
Настоящая методика определяет условия, цели, объем проведения испытаний и состояние РВАЗДСМ при испытаниях на предупреждение о наличии ЦО и торможение. Испытания проводят при соблюдении следующих условий:
а) испытание проводят на гладкой, сухой, бетонной поверхности или поверхности, обеспечивающей оптимальное сцепление;
б) испытательная поверхность должна иметь равномерный уклон от 0% до 3%;
в) температура окружающей среды должна составлять от 0°C до 45°C;
г) видимость по горизонтали должна быть такой, чтобы за РВАЗДСМ можно было наблюдать в течение всего испытания.
Естественное окружающее освещение должно быть однородным в зоне испытаний и превышать 1000 лк в случае сценария столкновения РВАЗДСМ с ЦО и 2000 лк в случае сценария столкновения РВАЗДСМ с макетом пешехода. Не допускается движение при проведении испытаний в направлении солнца или под малым углом от него.
Измеряемые параметры должны соответствовать следующим требованиям:
а) текущая скорость РВАЗДСМ:
- диапазон значений - от 0,1 до 10,0 м/с,
- погрешность измерения - ±0,1 м/с,
- частота обновления данных - не менее 100 Гц;
б) текущее ускорение РВАЗДСМ:
- частота обновления данных - не менее 100 Гц;
в) дистанция между РВАЗДСМ и ЦО:
- диапазон значений - от 0 до 100 м,
- погрешность измерения - ±0,1 м,
- частота обновления данных - не менее 100 Гц;
г) временная дистанция между РВАЗДСМ и ЦО:
- диапазон значений - от 0 до 10 с,
- погрешность измерения - ±0,1 с,
- частота обновления данных - не менее 100 Гц.
При проведении испытаний визуальные параметры ПС предупреждения должны отражать следующие действия оператора:
- факты наличия события (воздействие операторов на органы управления РВАЗДСМ, события при движении ТС);
- факты реакции на событие (состояние СИ, световых и иных штатных приборов ТС).
Перечень параметров, контролируемых визуально с использованием индикаторных средств:
- факт наличия события в системной шине (появление кода команды в шине);
- факт наличия события в иных системных шинах РВАЗДСМ (при необходимости).
Б.4.2 При проведении испытаний для РВАЗДСМ и ЦО задаются следующие условия:
а) исходная скорость РВАЗДСМ - (скорость выполнения задания ±2) км/ч;
б) исходная скорость группы ЦО - (скорость выполнения задания ±2) км/ч;
в) взаимное расположение ЦО в группе: середины продольных габаритов ЦО должны находиться на одном уровне (в одной плоскости, поперечной средней линии полосы движения), допустимое смещение плоскостей - не более 1 м;
г) исходное положение: РВАЗДСМ - впереди группы ЦО;
д) значение передней дистанции зоны контроля компонентов должно соответствовать техническим требованиям на МФВ и составлять не менее 400 м;
е) характер движения ЦО по полосе: в установившемся режиме с минимальными корректирующими движениями педали управления двигателем и вертикальной проекции исследуемого объекта боковое смещение относительно центра полосы в ходе движения по участку измерения - не более 0,25 м;
ж) параметры ускорения и замедления при смене скоростного режима не регламентируются.
Б.4.3 РВАЗДСМ должна соответствовать следующим параметрам:
а) подробная информация о стратегии подготовки РВАЗДСМ перед испытанием, запрошенная изготовителем РВАЗДСМ, содержится в программе испытаний;
б) распределение нагрузки должно соответствовать рекомендациям изготовителя. После начала процедуры испытания изменение массы РВАЗДСМ не допускается;
в) перед началом испытания РВАЗДСМ может подвергнуться последовательному приведению тормоза в действие, чтобы убедиться в том, что рабочая тормозная система находится в оптимальном рабочем состоянии.
Б.4.4 Объекты, используемые в ходе испытания
ЦО, используемые в ходе испытания, должны представлять собой мягкий объект, соответствующий его характеристикам обнаружения, приведенным в таблице Б.1. Контрольной точкой для определения местоположения ЦО должна быть наиболее удаленная в заднем направлении точка на осевой линии ТС.
Объект, используемый в ходе испытания на обнаружение пешехода, должен представлять собой объект-пешеход, соответствующий требованиям ISO 19206.
Подробная информация о средствах, позволяющих конкретно идентифицировать и воспроизводить объект (объекты), должна быть указана в документации, касающейся официального утверждения типа ЗДСМ.
Примечание - Статистические параметры метрических измерений ЦО для испытаний и требования [7], [8] приведены в приложении Г.
Б.5 Испытание на предупреждение и торможение в случае стационарного объекта
С момента начала функционального этапа до момента столкновения оператор не производит никакую корректировку управления РВАЗДСМ.
Б.5.1 Время срабатывания для режимов предупреждения о столкновении
Должен обеспечиваться, по меньшей мере, один режим предупреждения не позднее, чем это указано в таблице Б.3.
В случае РВАЗДСМ, указанных в строке 2 таблицы Б.3, предупреждение должно быть тактильным, звуковым или визуальным.
Таблица Б.3 - Требования к испытаниям на предупреждение и торможение
Масса | Стационарная цель | Движущаяся цель | |||||
(М), т | Время срабатывания для режимов предупреждения, с | Снижение скорости | Время срабатывания для режимов предупреждения, с | Снижение скорости | Заданная скорость, | ||
По меньшей мере 1 | По меньшей мере 2 | По меньшей мере 1 | По меньшей мере 2 | км/ч | |||
М>8 | Не позднее 1,4 перед началом этапа экстренного торможения | Не позднее 0,8 перед началом этапа экстренного торможения | 20 км/ч | Не позднее 1,4 перед началом этапа экстренного торможения | Не позднее 0,8 перед началом этапа экстренного торможения | Без столкновения | (12 ±2) |
М 8 | Не позднее 0,8 перед началом этапа экстренного торможения | Перед началом этапа экстренного торможения | 10 км/ч | Не позднее 0,8 перед началом этапа экстренного торможения | Перед началом этапа экстренного торможения | Без столкновения | (34±2) |
Б.5.2 Должны обеспечиваться, по меньшей мере, два режима предупреждения не позднее, чем это указано в графе С таблицы Б.3.
Любое снижение скорости на этапе предупреждения не должно превышать значения 30% от общего снижения скорости РВАЗДСМ в зависимости от того, какое из этих значений выше.
За этапом предупреждения о столкновении следует этап экстренного торможения.
Соответствие этим требованиям проверяют посредством практических измерений в ходе испытания либо при помощи документации, представленной изготовителем РВАЗДСМ, по договоренности между АИЛ и изготовителем РВАЗДСМ.
РВАЗДСМ и движущееся ЦО перемещаются по прямой линии в одном направлении до момента, наступающего за 2 с до начала функционального этапа испытания.
Таблица Б.4 - Пределы рабочих скоростей при землеройных и дорожно-строительных работах
Вид работ | Скорость движения, км/ч |
Бульдозер | |
Резание и перемещение грунта | 2,3-6 |
Рыхление | 1,8-2,1 |
Максимальная скорость | 11 |
Каток | |
Уплотнения насыпных и асфальтовых покрытий | 2,63-8,6 |
Максимальная скорость | 9 |
Грейдер | |
Копание | до 2,5 |
Перемещение грунта | до 2,7 |
При отделочных проходах | до 3 |
Максимальная скорость | до 38 |
Фронтальный погрузчик | |
Наполнение ковша грунтом | 2,2-4 |
Максимальная скорость | 34 |
Примечание - Поверхность площадки должна иметь твердое покрытие, обеспечивающее необходимое сцепление шин (гусениц) и невозможность ее разрушения шинами (гусеницами) при повороте ВАЗДСМ, а также должна быть сухой; уклон площадки в любом направлении не должен превышать 3%.
Приложение В
(обязательное)
Методика испытаний компонентов обнаружения. Дополнительные требования к эффективности и испытаниям
В.1 Видеокамера
Испытания предназначены для оценки эффективности использования видеокамер, предназначенных для применения на ВАЗДСМ.
Критериями эффективности ВК являются:
а) качество изображения, представленного разложением на составляющие ТВ-линии или аналогичным способом; основано на определении разрешения по штриховым шкалам на испытательном объекте;
б) предел эксплуатационного уровня освещенности для поддержания минимального предполагаемого разрешения;
в) вертикальные и горизонтальные поля зрения системы;
г) дальность обнаружения (см. 4.3.1);
д) маскировка при прямом облучении светом при естественном дневном освещении;
е) время, необходимое системе для полного реагирования на быстрые изменения освещенности.
Эти испытания не предназначены для определения критериев эффективности, связанных с высотой установки камеры. Критерии эффективности, описанные в этих испытаниях, предполагают условия эксплуатации со средней освещенностью 50 лк и минимальной освещенностью 20 лк.
В.1.2 Испытательный объект
В качестве испытательного объекта должен быть использован манекен, описанный в приложении Г.
В.1.3 Испытательная площадка
В.1.4 Окружающая обстановка
Испытания должны проходить в дневное время суток, на площадку не должны падать тени от посторонних объектов, а также на площадке необходимо отсутствие любых источников отражения, попадающих в поле обзора машины.
ВК должна быть выровнена по вертикали и горизонтали по отношению к ЦО.
В.1.5 Испытательный объект
ЦО должен быть расположен вертикально и обращен к камере в центре поля обзора, а также перпендикулярно к оптической оси объектива. Если не указано иное, то изображение испытательного объекта по вертикали должно занимать весь угол обзора монитора.
В.2 Монитор
Монитор должен быть установлен и выровнен нормально по отношению к лицу наблюдателя, на удобной высоте, а также свободен от яркого света и отражений.
В.2.1 Горизонтальное испытание
В.2.2 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.2.3 Процедура испытаний
Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта. Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора. Отметьте эту точку.
Точно так же определите и отметьте точку для противоположной стороны экрана монитора. Измерьте и зарегистрируйте расстояние между этими двумя точками. Тригонометрическим расчетом определите горизонтальное поле обзора.
В.2.4 Вертикальное испытание
В.2.4.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.2.4.2 Процедура испытаний
Поверните ВК и монитор на 90°. Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от ВК до испытательного объекта. Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора. Отметьте эту точку.
Точно так же определите и отметьте точку для противоположной стороны экрана монитора. Измерьте и зарегистрируйте расстояние между этими двумя точками. Тригонометрическим расчетом определите вертикальное поле обзора.
В.2.5 Дальность
В.2.5.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.2.5.2 Процедура испытаний
Переместите испытательный объект вдоль оптической оси камеры в точку, в которой высота изображения испытательного объекта на экране составляет 7 мм. Измерьте и зарегистрируйте расстояние от испытательного объекта до камеры.
Примечание - Для эффективной эксплуатационной дальности системы принята за основу минимальная высота экрана 7 мм. Это примерно 10% от вертикальной высоты экрана, которая обычно считается приемлемой для визуального обнаружения.
В.2.6 Дополнительные испытания
В.2.6.1 Разрешение системы
В.2.6.2 Уровень освещенности
Уровень освещенности должен быть более 20 лк и менее 2000 лк.
В.2.6.3 Процедура испытаний
Установите испытательный объект на таком расстоянии от камеры, чтобы его изображение занимало 100% высоты посередине экрана монитора. Определите и зарегистрируйте разрешение системы CCTV по штриховому клину на манекене из комплекта шкал Н-А (Объяснение обозначений технических характеристик будет представлено в ТД).
В.2.6.4 Критерии испытания
Должно быть достигнуто разрешение более 200 ТВ-линий или аналогичный эквивалент.
В.2.7 Влияние освещенности на разрешение
В.2.7.1 Проведение испытания
Повторите процедуру В.9, меняя пошагово, от самого низкого до самого высокого, уровень освещенности, который указан в технических данных производителя. Запишите уровень освещенности, при котором наблюдается минимально приемлемый уровень разрешения.
В.2.7.2 Критерии испытания
Должно быть достигнуто разрешение более 200 ТВ-линий или аналогичный эквивалент во всем указанном диапазоне уровня освещенности или указанный диапазон должен быть уменьшен до диапазона, соответствующему разрешению 200 ТВ-линий.
В.2.8 Искажение по краям экрана
В.2.8.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.2.8.2 Процедура испытаний
Поместите испытательный объект на таком расстоянии от камеры, чтобы его изображение находилось в центре экрана монитора и занимало 25% по вертикали. Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта.
Переместите испытательный объект по этой дуге в точку, для которой вертикальная ось изображения испытательного объекта совпадает с границей видимости на экране монитора.
Перемещайте испытательный объект по этой дуге до точки, в которой наблюдатель воспринимает объект на экране монитора как находящийся на краю видимости.
Измерьте и зарегистрируйте высоту изображения испытательного объекта.
В.2.8.3 Критерии испытаний
Изображение должно наблюдаться без уменьшения размеров на краю для 25% высоты испытательного объекта.
В.2.9 Разрешение по краям экрана
В.2.9.1 Уровень освещенности
Уровень освещенности должен быть более 50 лк и менее 50000 лк.
В.2.9.2 Проведение испытаний
Установите испытательный объект (манекен) на 100% вертикальной высоты экрана монитора. Переместите испытательный объект в одну сторону экрана.
Измерьте и зарегистрируйте разрешение.
Поверните испытательный объект на 180° и повторите эту процедуру для противоположной стороны края экрана.
В.2.9.3 Критерии испытания
Должно быть достигнуто минимальное разрешение 200 ТВ-линий или аналогичный эквивалент (см. В.1, а). Если это разрешение не будет достигаться по всей ширине экрана монитора, то поле обзора должно определяться углом, при котором такое разрешение достигается.
В.2.10 Влияние естественного дневного света
В.2.10.1 Уровень освещенности
Испытание должно проводиться на открытом воздухе под прямыми солнечными лучами.
В.2.10.2 Процедура испытаний
Наведите камеру прямо на солнце, чтобы произвести маскировку на мониторе.
Поместите испытательный объект перед камерой и затем отодвигайте его от камеры до тех пор, пока изображение испытательного объекта целиком не скроется маскировкой.
Измерьте и зарегистрируйте расстояние от камеры до испытательного объекта, а также ширину маскировки. Эти измерения должны проводиться на уровне плеча испытательного объекта (манекена).
В.2.10.3 Критерии испытания
Если не указано иное, то максимальная ширина маскировки должна быть не более 5% от ширины экрана монитора.
В.2.11 Восстановление после радикального изменения уровня освещенности
В.2.11.1 Уровень освещенности
Поместите испытательный объект напротив ярко освещенного фона на возвышении, чтобы его было видно в деталях без слияния со второстепенными объектами на экране монитора.
В.2.11.2 Процедура испытаний
Поместите затвор на камеру и удерживайте в течение 5 с. Снимите затвор.
Измерьте и зарегистрируйте время, за которое силуэт испытательного объекта станет ясно различимым.
В.2.11.3 Критерии испытаний
Время восстановления должно быть не более 1,5 с, если не указано иное.
В.2.12 Функциональные испытания
Проверьте работу дополнительных функций системы, таких как нормальное/зеркальное изображение и настройки день/ночь для монитора.
Примечание - Некоторые системы могут быть включены для использования вперед или назад. В прямом использовании изображение на мониторе, как правило, установлено в нормальном изображении, при заднем использовании - в зеркальном отражении. При одновременном подключении двух систем камер: одна для прямого использования, другая для использования назад, камеры должны быть подключены к одному монитору и может потребоваться автоматическое переключение между зеркальным и нормальным изображением.
В.2.13 Регистрация данных
В.2.13.1 Информация
Должна быть зарегистрирована следующая информация о системе видеонаблюдения:
- технические характеристики монитора и камеры;
- длина кабеля;
- номер модели;
- серийный номер;
- дата испытаний(я).
В.2.13.2 Оценка испытаний
Оценка испытаний, полученная в результате тестов на горизонтальное испытание, вертикальное испытание и дальность, должна быть зарегистрирована, как показано на рисунках В.1 и В.2.
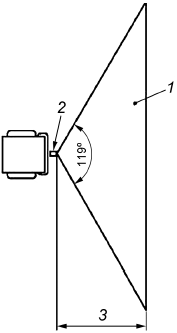 |
1 - зарегистрированные угол и диапазон; 2 - камера; 3 - дальность в метрах
Рисунок В.1 - Горизонтальное поле зрения
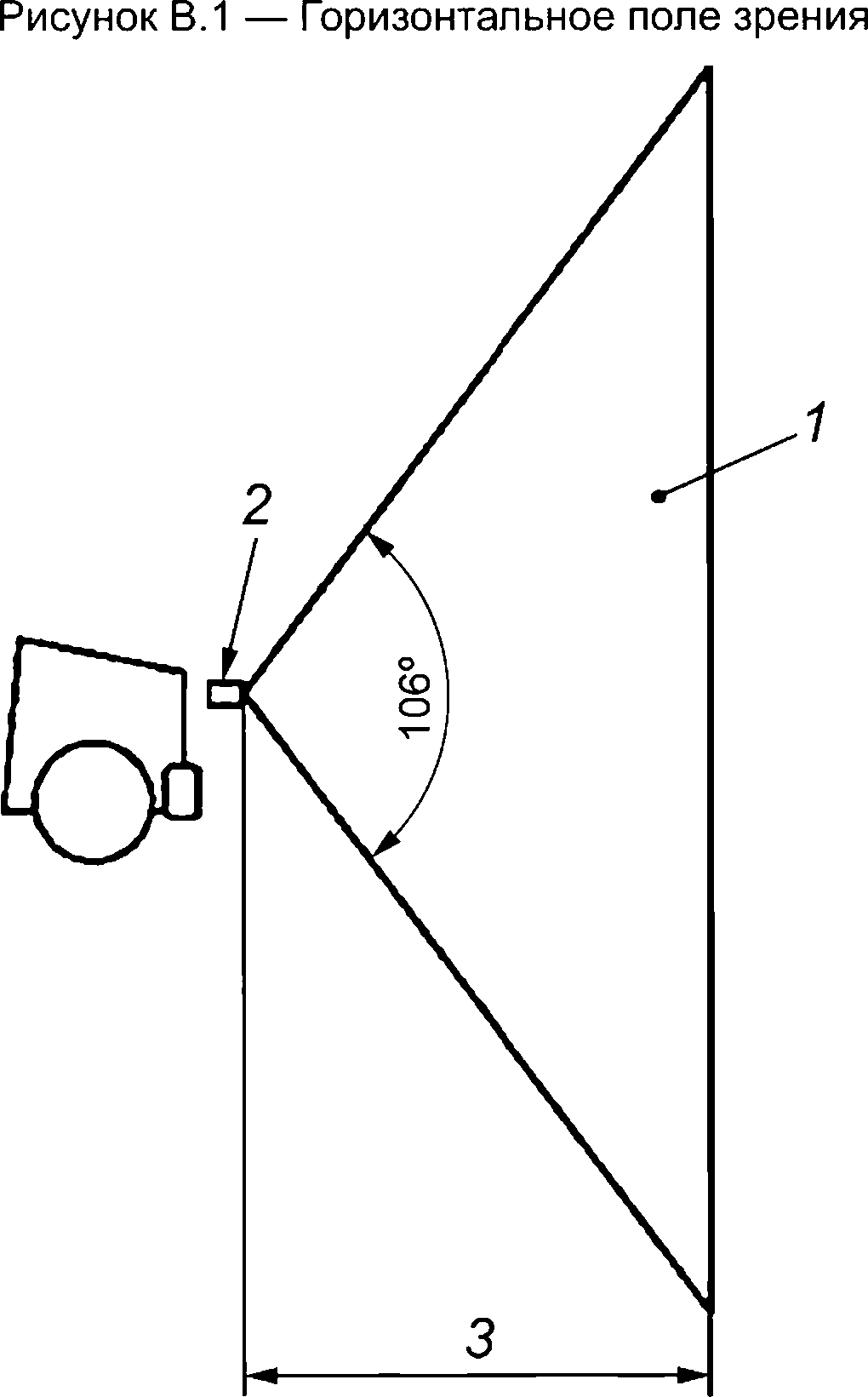 |
1 - зарегистрированные угол и диапазон; 2 - камера; 3 - дальность в метрах
Рисунок В.2 - Вертикальное поле зрения
В.2.14 Фактические значения
Фактические значения, измеренные в испытании В.9, должны быть зарегистрированы с соответствующими критериями испытаний.
В.2.15 Функциональная производительность
Функциональная производительность в тесте В.10 должна быть зарегистрирована как положительный или отрицательный результат для каждой функции.
В.3 Методика испытаний радарных датчиков
В.3.1 Введение
Данная процедура описывает метод определения зоны обнаружения для радиолокационных систем, используемых с целью обнаружения препятствий вблизи РВАЗДСМ. Процедура предназначена для определения геометрии трехмерной зоны, в которой человек будет гарантированно обнаружен.
В.3.2 Испытательный объект
В качестве испытательного объекта принимают ту часть человеческого тела, которая вступает в зону обнаружения. В некоторых случаях первой частью тела, вступающей в зону обнаружения, является голова. Таким образом, эта процедура использует обнаружение исключительно головы как точки измерения границ зоны обнаружения.
В.3.3 Испытательная площадка
Испытательная площадка должна быть открытой, с ровной поверхностью, с покрытием из сухого песка и (или) гравия.
На испытательной площадке не должно быть камней, листвы или мусора диаметром более 8 см. Непосредственно перед радарной системой в пределах 50 м не должны находиться большие объекты типа зданий или куч. С боковых сторон крупные объекты не должны находиться в пределах 25 м. Все сотрудники, за исключением проводящих испытания, должны находиться в зоне, не обнаруживаемой радаром.
На площади, равной ожидаемой зоне обнаружения, должна быть нанесена прямоугольная сетка с интервалом 1 м.
В.3.3.1 Условия испытаний
Условия испытаний должны соответствовать нормативным требованиям.
В.3.3.2 Место установки радара
Радар должен быть установлен на неподвижный штатив (стенд) в порядке, описанном в процедуре испытаний. Ни одна часть стенда не должна быть в пределах зоны обнаружения радара.
Крепление радара должно иметь приспособление для изменения наклона радара в вертикальной плоскости на угол, требуемый процедурой испытаний, а также средства измерения угла наклона.
В.3.3.3 Процедура испытаний
В.3.3.4 Общие требования
Радиолокационные датчики излучают и принимают в рамках конического пучка, который может иметь круговое или эллиптическое сечение. Полная геометрия зоны может быть определена путем измерения горизонтальных и вертикальных границ зоны обнаружения, как показано на рисунке В.3.
 |
Рисунок В.3 - Измерение полной геометрии зоны обнаружения
В.4 Измерение горизонтальных границ
Установите радар на ВАЗДСМ, ориентировав его стандартно, но с расширяющимся по горизонтали пучком и центральным лучом на высоте носа испытуемого человека.
Установите сигнальное устройство там, где оно может быть услышано испытуемым, производящим тестирование.
Поместите испытуемого на расстоянии 0,5 м от радара на центральной линии ожидаемой зоны обнаружения. Если устройство предупреждения указывает обнаружение, то испытуемый перемещается боком в обоих направлениях до тех пор, пока обнаружение не прекратится. Зарегистрируйте последнюю позицию на каждой стороне, где происходит обнаружение. Зарегистрируйте также любую позицию между этими двумя точками, где также не происходит обнаружение.
Поместите испытуемого еще на 0,5 м от радара и повторите описанную выше процедуру. Повторяйте эту процедуру с интервалом 1 м от радара, пока обнаружение не прекратится.
Зарегистрируйте горизонтальные границы зоны обнаружения. Зарегистрируйте любую область в пределах этой зоны, где обнаружение не происходило.
В.5 Измерения вертикального предела
Поместите испытуемого на расстоянии 0,5 м от радара на центральной линии горизонтальной зоны обнаружения. Если происходит обнаружение, то увеличивайте вертикальный угол до тех пор, пока обнаружение не прекратится. Затем зарегистрируйте максимальный угол вверх, где обнаружение имеет место.
Повторите тест на расстоянии 1 м от радара и дальше с интервалом 1 м до конца горизонтальной зоны обнаружения.
Переверните радар так, чтобы обычная верхняя часть зоны обнаружения была внизу. Убедитесь, что центральный луч вновь находится на одном уровне с носом испытуемого.
Повторите описанные выше испытания, чтобы зарегистрировать угол, при котором обнаружение происходит на каждом расстоянии от радара.
В.6 Адаптация процедуры испытаний для различных типов радаров
Некоторые типы радаров могут использовать в методе обнаружения относительное движение между радаром и испытательным объектом. Если эта функция дополнительная, то для этого испытания она должна быть отключена. Если функция относительного движения между радаром и испытательным объектом не может быть выключена, то испытуемый должен имитировать требуемое движение.
В зависимости от выбранного типа радара регистрируют следующее:
а) метод обнаружения не требует движения;
б) требование движения отключается;
в) движение всегда требуется.
Если движение всегда требуется, то нужно записать вид движения, скорость и (или) расстояние.
В.7 Адаптации испытания для радиолокационных датчиков с программируемыми зонами обнаружения
Если датчик радара может быть запрограммирован для создания разнообразных зон обнаружения с различными формами и размерами, то испытания должны быть использованы для подтверждения максимальных размеров зоны обнаружения, которая может быть запрограммирована, как указано производителем.
В.8 Регистрация граничных точек обнаружения
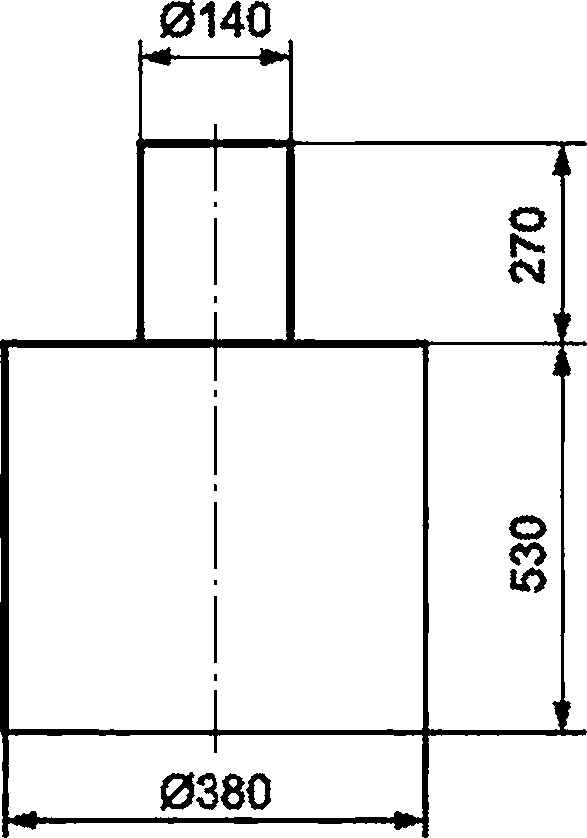 |
Рисунок В.4 - Граничные точки обнаружения в вертикальной плоскости. Показаны на диаграмме сеткой с интервалом 1 м
 |
Рисунок В.5 - Граничные точки обнаружения на горизонтальной плоскости. Показаны на диаграмме сеткой с интервалом 1 м
В.9 Дополнительные испытания
В.9.1 Сигналы от крупных объектов вне зоны обнаружения
Большие ЦО могут быть обнаружены при больших углах и расстояниях, чем человек, что может создать ложные сигналы. Испытание пункта повторяют с использованием трехгранного металлического отражателя в качестве испытательного объекта, как показано на рисунке Г.2. Устанавливают испытательный объект на высоте горизонтальной оси пучка радара с вогнутой поверхностью, направленной в сторону радара. Регистрируют зону обнаружения также, как для человека.
Примечание - Поскольку, как доказано на практике, трудно получить устойчивые результаты для любого испытательного объекта, имитирующего большую структуру, это испытание нужно рассматривать как ориентировочное определение зоны обнаружения для крупных объектов.
В.9.2 Подавление сигнала обнаружения крупными объектами на заднем плане
Некоторые методы измерения дальности с помощью радара могут допускать преобладание больших объектов на заднем плане по сравнению с меньшими объектами, находящимися ближе к радару, а также маскировать их присутствие.
Изготовитель должен указать, какие методы используются, и объяснить, какие дополнительные меры могут минимизировать этот эффект.
При стандартных испытаниях этот эффект может давать ошибочные результаты, поскольку в них не применяются дополнительные методы для минимизации такого эффекта. Там, где такие методы используются, изготовитель должен описать испытания с использованием испытательного объекта, приведенного на рисунке Г.2, чтобы продемонстрировать степень снижения этого эффекта.
В.10 Практические указания установки радаров на рассматриваемой землеройной и дорожно-строительной машине
Изготовитель должен включить в инструкции практические указания для установки радаров на РВАЗДСМ с учетом следующего.
Вышеупомянутые испытания описывают трехмерную зону, в которой происходит обнаружение, если достаточно большая часть человеческой фигуры попадает в эту зону. Испытания проводятся на человеке, но и другие объекты, в том числе поверхность земли, могут быть обнаружены. Поэтому зона обнаружения должна быть расположена таким образом, чтобы перехватить сигнал от человека, но избежать перехвата сигнала от земли, не вызвав ложного срабатывания.
Внимание должно быть обращено на то, что вертикальные границы определяются только по отношению к горизонтальной центральной линии. Глубина же конической зоны при горизонтальных границах стремится к нулю, как показано на рисунке В.4.
В идеале радар должен быть установлен на высоте менее 1,5 м. Если это условие не выполняется, то зона обнаружения рядом с радаром может быть выше уровня, где человек будет обнаружен. Если луч радара наклоняют вниз, чтобы улучшить обнаружение рядом с радаром, то ложные сигналы могут исходить от поверхности земли.
Проверка должна проводиться на поверхности, типичной для предполагаемой производственной среды, поскольку гладкая сухая поверхность, типичная для испытательного участка, меньше отражает сигнал обратно на радар, чем влажная разбитая поверхность. Некоторые виды грунта, в частности песок, не могут вызвать нежелательные сигналы, даже если радар наклонен на него.
Радар, как правило, должен устанавливаться так, чтобы ни одна часть машины не попадала в зону обнаружения, во избежание нежелательных сигналов. Однако в некоторых радарах могут использоваться методы обнаружения, игнорирующие объекты, не перемещающиеся относительно радара. Производитель должен указать области их применения.
Приложение Г
(обязательное)
Виды препятствий (целевых объектов)
Примечание - Параметры видов препятствий разработаны согласно требованиям метрических измерений [8].
Г.1 Препятствие для испытаний, предназначенное для имитации сидящего человека, должно соответствовать следующим требованиям и использоваться исключительно для достижения сходных (воспроизводимых) результатов (рисунок Г.1):
- препятствие для испытаний должно быть наполнено песком или щебнем;
- препятствие должно быть выполнено из пластика (например, полиэтилен с матовой поверхностью);
- цвет должен быть графитовым серым с матовой поверхностью.
 |
Рисунок Г.1 - Испытательный объект, имитирующий сидящего человека
Г.2 Препятствие, имитирующее габаритную неподвижную структуру
 |
Г.3 Для тестирования АСУ РВАЗДСМ используются движущиеся и неподвижные объекты (таблица Г.1), которые представляют контуры и макеты возможных объектов при движении и работе ЗДСМ.
Примечание - Параметры видов препятствий были описаны на основе ГОСТ Р 70851.
Таблица Г.1 - Движущиеся и неподвижные препятствия
Объекты | Размеры (Д Ш В), м не менее | |
Неподвижные (муляж) | Человек сидящий | 0,4 0,4 0,8 |
Погрузчик | 7,3 3,2 2,5 | |
Сельскохозяйственное орудие | 3 6 0,8 | |
Стационарный крупногабаритный объект | 2,5 2,5 2,5 | |
Высокая трава | 3 1 0,8 | |
Кустарник | 1 1 1 | |
Камень | 0,5 0,5 1 | |
Человек стоящий | 0,4 0,4 1,2 | |
Бульдозер | 12 4 4 | |
Машина | 5 2 2 | |
Опора ЛЭП | 9 9 6 | |
Низкая трава | 3 1 0,2 | |
Дерево | 0,2 0,2 2 | |
Животное | 2,5 0,8 1,2 | |
Движущиеся (контур) | Человек | 2 0,4 |
Животное | 1,2 2,5 | |
Бульдозер | 4 4 | |
Транспортное средство | 2 2 | |
Погрузчик | 3,2 2,5 | |
Примечание - При изготовлении макетов ЦО следует использовать параметры метрических измерений [8].
Библиография
[1] | Дорожно-строительные машины. Мигляченко В.П., Сергеев П.Г. - М.: Лесная промышленность, 1978. - 288 с. | |
[2] | Технический регламент Таможенного союза 018/2011 | О безопасности колесных транспортных средств |
[3] | ISO 16750-1:2018* | Транспорт дорожный. Условия окружающей среды и испытания электрического и электронного оборудования. Часть 1. Общие положения |
[4] | ISO 25119 | Тракторы и машины для сельского и лесного хозяйства. Детали систем управления, связанные с обеспечением безопасности |
[5] | Технический регламент Таможенного союза 010/2011 | О безопасности машин и оборудования |
[6] | SAE J 3016-2018 | Таксономия и определения терминов, относящихся к автоматизированным системам вождения автотранспортных средств на дорогах |
[7] | Машины землеройные. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность | |
[8] | ISO 19206 | Транспорт дорожный. Контрольные приборы для оценки функций активной безопасности муляжей транспортных средств, уязвимых участников дорожного движения и других объектов. Часть 1. Требования к муляжам задней части кузова пассажирских автомобилей |
УДК 631.372:006.354 | ОКС 19.060 |
Ключевые слова: автоматизированная система управления, высокоавтоматизированная землеройная и дорожно-строительная машина, целевой объект, уровень автоматизации | |
