ГОСТ 34443-2018
(ISO 16368:2010)
Группа Г86
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МОБИЛЬНЫЕ ПОДЪЕМНИКИ С РАБОЧИМИ ПЛАТФОРМАМИ
Расчеты конструкции, требования безопасности, методы испытаний
Mobile lifts with working platforms. Construction calculations, safety requirements, test methods
МКС 53.020.20
ОКП 48 3700
Дата введения 2019-07-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Межотраслевым фондом "Сертификация подъемно-транспортного оборудования и услуг по техническому обслуживанию и ремонту машин" ("ПТОУ-Фонд") на основе официального перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 5, выполненного ФГУП ""
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 30 августа 2018 г. N 111-П)
За принятие проголосовали:
Краткое наименование страны | Код страны | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Туркмения | ТМ | Главгосслужба "Туркменстандартлары" |
Узбекистан | UZ | Узстандарт |
(Поправка. ИУС N 2-2019), (Поправка. ИУС N 1-2021).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 23 октября 2018 г. N 820-ст межгосударственный стандарт ГОСТ 34443-2018 (ISO 16368:2010) введен в действие в качестве национального стандарта Российской Федерации с 1 июля 2019 г.
5 Настоящий стандарт является модифицированным по отношению к международному стандарту ISO 16368:2010* "Платформы рабочие подъемные передвижные. Проект, расчеты, требования безопасности и методы испытаний" ("Mobile elevating work platforms - Design, calculations, safety requirements and test methods", MOD) путем изменения его структуры для приведения в соответствие с правилами, установленными в ГОСТ 1.5 (подразделы 4.2 и 4.3).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Дополнительные положения и требования, включенные в текст стандарта для учета потребностей национальной экономики указанных выше государств и/или особенностей межгосударственной стандартизации, выделены курсивом*.
________________
* В оригинале обозначения и номера стандартов и нормативных документов в разделах "Предисловие", "Область применения", "Термины и определения", в приложениях G и DA и отмеченные по тексту документа знаком "**" приводятся обычным шрифтом, остальные по тексту документа выделены курсивом. - .
Сравнение структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении ДБ.
Наименование настоящего стандарта изменено относительно указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
Сведения о соответствии ссылочных межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДА
6 Настоящий стандарт может быть применен на добровольной основе для соблюдения требований Технического регламента Таможенного союза ТР ТС 010/2011 "О безопасности машин и оборудования" и Технического регламента Таможенного союза ТР ТС 018/2011 "О безопасности колесных транспортных средств"
7 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
ВНЕСЕНЫ: поправка, опубликованная в ИУС N 2, 2019 год; поправка, опубликованная в ИУС N 1, 2021 год
Поправки внесены изготовителем базы данных
Введение
Предметом настоящего стандарта является установление требований безопасности для защиты людей и объектов от риска несчастного случая, связанного с работой на мобильных подъемниках с рабочими платформами (МПРП). Они состоят из одной или нескольких сборочных единиц, изготовленных одним или несколькими производителями в результате деятельности, которая включает в себя конструирование, производство и проведение испытаний, а также предоставление информации о самом МПРП.
Настоящий стандарт не повторяет все общие технические правила, приемлемые для каждого электрического, механического или структурного компонента. Его требования к обеспечению безопасности сформулированы на основании того, что МПРП периодически проходят техническое обслуживание и текущий ремонт по руководствам по эксплуатации в соответствии с рабочими условиями, частотой применения, национальными и другими нормами. Считается, что подъемные платформы проверяются на функционирование перед началом работы независимо от ежедневного или редкого использования и не допускаются к эксплуатации, если на них отсутствуют все необходимые исправные устройства управления и обеспечения техники безопасности. В случае, когда для ясности в тексте приведен пример меры безопасности, это не значит, что данная мера является единственным возможным решением. Допустимо любое другое решение, ведущее к снижению того же самого риска, если обеспечивается эквивалентный уровень безопасности.
В приложении A объясняется выбор максимальной скорости ветра на уровне 6 баллов по шкале Бофорта.
Так как в предыдущих национальных стандартах не было удовлетворительного объяснения динамических факторов, использованных для вычислений устойчивости, то были одобрены результаты испытаний, проведенных рабочей группой TC 98/WG 1 Европейского комитета по стандартизации (CEN), чтобы установить подходящие коэффициент и метод расчета устойчивости для МПРП. Этот метод испытания изложен в приложении B в качестве руководства для изготовителя, чтобы использовать максимальные или минимальные скорости манипулирования и получить таким образом преимущество при разработке систем управления.
Подобным образом и для исключения необъясненных противоречий в коэффициентах использования канатов, обнаруженных в других стандартах для подъемных устройств, в текст настоящего стандарта и приложение C включены соответствующие положения из национального стандарта Германии (DIN 15020). Пример расчета систем привода с использованием стального каната приведен в приложении D.
Приложение E дает контрольные вычисления устойчивости рабочей платформы при работе подъемника у бордюра или обочины дороги. Приложение F предоставляет информацию о руководствах по эксплуатации, а приложение G задает дополнительные требования для устройств беспроводного управления.
Приложение H представляет перечень значимых потенциальных возможностей нанесения вреда, которые рассматриваются в настоящем стандарте.
1 Область применения
Настоящий стандарт устанавливает требования, обеспечивающие единство проектирования, расчетов и испытания всех типов мобильных подъемников с рабочими платформами (далее - МПРП) для обеспечения их безопасного применения.
Настоящий стандарт применяется при конструкторских расчетах металлоконструкций, определении критериев устойчивости, испытаниях и проверках безопасности перед вводом в эксплуатацию МПРП. Стандарт определяет опасности, возникающие при эксплуатации МПРП, и описывает методы их устранения или снижения.
Настоящий стандарт не распространяется на следующие устройства и требования:
a) стационарно установленные пассажирские подъемные устройства, обслуживающие определенные этажи;
b) пожарные и спасательные устройства;
c) рабочие клети без направляющих, подвешиваемые к подъемным устройствам;
d) подъемные рабочие места машинистов на складах с доступом к товарам по рельсовым направляющим и на вспомогательном оборудовании;
e) подъемные приспособления, смонтированные у заднего борта кузова автомобиля;
f) подъемники с рабочими платформами мачтового типа [1];
g) выставочное оборудование;
h) подъемные столы с высотой подъема меньше 2 м;
i) строительные грузопассажирские и грузовые подъемники (ГОСТ 33651, ГОСТ 33558.1 и ГОСТ 33558.2);
j) наземное аэродромное оборудование;
k) различные буровые вышки для бурения;
l) подъемные рабочие места машинистов на технологическом транспорте (в том числе на базе грузовых автомобилей);
m) устройства для осмотра и технического обслуживания (нижних частей) мостов, в том числе подмостовые: инспекционные и эксплуатационные устройства;
n) специально спроектированные с учетом требований электробезопасности МПРП, используемые для работы на электрических установках под напряжением.
Настоящий стандарт не охватывает потенциальные опасности, возникающие в следующих случаях:
- использование в потенциально взрывоопасных атмосферах;
- использование сжатых газов для компонентов, несущих нагрузку;
- работы на электрических системах под напряжением.
Примечания
1 Возможности нанесения вреда от работы на электрических системах под напряжением рассматриваются в [2]. Мобильные подъемники с рабочими платформами, которые оснащены непроводящими (изоляционными) компонентами, могут обеспечивать некоторую защиту от потенциальных опасностей при непреднамеренном контакте с такими системами [3].
2 Для МПРП, предназначенных для проведения работы под напряжением, допускается применять настоящий стандарт вместе с [2], принимая во внимание возможные исключения из настоящего стандарта, которые точно определяются в [2].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие межгосударственные стандарты:
ГОСТ 2.601-2013 Единая система конструкторской документации. Эксплуатационные документы
ГОСТ 12.1.003-2014 Система стандартов безопасности труда. Шум. Общие требования безопасности
ГОСТ 12.2.003-91 Система стандартов безопасности труда. Оборудование производственное. Общие требования безопасности
ГОСТ 12.4.026-2015** Система стандартов безопасности труда. Цвета сигнальные, знаки безопасности и разметка сигнальная. Назначение и правила применения. Общие технические требования и характеристики. Методы испытаний
ГОСТ 14254-2015 (IEC 60529:2013) Степени защиты, обеспечиваемые оболочками (код IP)
ГОСТ 15150-69 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 26828-86 Изделия машиностроения и приборостроения. Маркировка
ГОСТ 30630.1.9-2015** Методы испытаний на стойкость к внешним воздействующим факторам машин, приборов и других технических изделий. Особенности цифрового управления испытаниями на воздействие широкополосной случайной вибрации
ГОСТ 32681-2014** (ISO 20381:2009) Мобильные подъемники с рабочими платформами. Символы органов управления
ГОСТ 33558.1-2015** (EN 12158-1:2000+А1:2010) Подъемники строительные грузовые вертикальные. Общие технические условия
ГОСТ 33558.2-2015** (EN 12158-2:2000+А1:2010) Подъемники строительные грузовые наклонные. Общие технические условия
ГОСТ 33636-2015** (ISO 18878:2013) Мобильные подъемники с рабочими платформами. Обучение оператора (машиниста)
ГОСТ 33650-2015** Подъемники с рабочими платформами. Термины и определения
ГОСТ 33651-2015** (EN 12159:2012) Подъемники строительные грузопассажирские. Общие технические условия
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 33650, [4], а также следующие термины с соответствующими определениями:
3.1 Группа A: МПРП, у которых вертикальная проекция центра площади рабочей платформы во всех конфигурациях при максимальном наклоне шасси, заданном производителем, всегда находится внутри линий опрокидывания.
3.2 Группа B: МПРП, не входящие в группу A.
3.3 МПРП типа 1: МПРП, для которого передвижение разрешается только в том случае, когда он находится в транспортном положении.
3.4 МПРП типа 2: МПРП, для которого возможно передвижение с рабочей платформой в поднятом положении и управление осуществляется с пульта, расположенного на шасси.
Примечание - Допускаются комбинации МПРП типов 1 и 2.
3.5 МПРП типа 3: МПРП, для которого возможно передвижение с рабочей платформой в поднятом положении и управление осуществляется с пульта на рабочей платформе.
Примечание - Допускаются комбинации МПРП типов 2 и 3.
4 Требования безопасности и/или меры по обеспечению безопасности на стадиях проектирования и изготовления
4.1 Общие положения
4.1.1 Соответствие требованиям
МПРП должны соответствовать требованиям безопасности и/или мерам по обеспечению безопасности и охране труда, изложенным в настоящем разделе.
Кроме того, подъемники должны отвечать требованиям ГОСТ 12.2.003, в том числе в отношении тех опасностей, которые не определены настоящим стандартом.
Примечание - Могут применяться более жесткие национальные или местные требования.
4.1.2 Общие требования к конструкции МПРП
Подъемники, кроме предназначенных для эксплуатации в отапливаемых помещениях, должны изготовляться для работы при температуре от минус 40°С до плюс 40°C и скорости ветра не более 10 м/с на высоте 10 м, а предназначенные для работы при температуре ниже минус 40°C - при климатическом исполнении УХЛ (ХЛ) в соответствии с ГОСТ 15150.
Основные технические характеристики должны соответствовать национальным стандартам, техническим условиям и другим нормативным документам.
В конструкции МПРП должны быть предусмотрены:
- удобство управления, технического обслуживания и ремонта;
- удобство и безопасность доступа к механизмам, предохранительным устройствам систем управления, требующим постоянного технического обслуживания;
- возможность замены элементов гидросистемы без слива рабочей жидкости из всей гидросистемы;
- устройство привода рабочими движениями, обеспечивающее плавность пуска и остановки всех операций;
- возможность буксировки подъемников на пневмоходу.
Подъемники, предназначенные для работы в помещениях и наружных установках, в которых может образовываться взрывоопасная среда, должны проектироваться и изготовляться в соответствии с требованиями нормативных документов, регламентирующих условия безопасной эксплуатации.
Возможность работы подъемника во взрывоопасной среде (с указанием категории среды) должна быть отражена в паспорте и руководстве по эксплуатации подъемника.
В транспортном положении подъемники при движении по автомобильным дорогам по габаритным размерам должны отвечать национальным требованиям правил дорожного движения, а подъемники, предназначенные для движения по железнодорожному пути и перевозимые железнодорожным транспортом, - вписываться в габариты железнодорожного подвижного состава, в том числе при поставке за рубеж.
4.1.3 Требования к устойчивости
Коэффициент грузовой устойчивости при расчете с учетом действия сил тяжести металлоконструкций и груза, динамических воздействий, а также ветрового давления должен быть не менее 1,15.
При этом для подъемников на опорах уклон установки на рабочей площадке не должен превышать 0,5°, а для подъемников без опор - 3°, если в руководстве по эксплуатации не предусмотрен больший уклон, подтвержденный расчетами.
Для подъемников, установленных на железнодорожном подвижном составе, следует учитывать максимальное превышение рельсов на кривых участках пути и габарит подвески контактного провода. Действие рельсовых захватов при расчете устойчивости не учитывается.
Коэффициент собственной устойчивости должен быть не менее 1,15, подтверждаться расчетом и характеризовать отношение момента, создаваемого силой тяжести всех частей подъемника с учетом уклона площадки в сторону опрокидывания и ветровой нагрузки, которая направлена в ту же сторону.
Примечание - Расчеты устойчивости подъемников должны быть подтверждены при предварительных испытаниях инструментальными измерениями.
4.2 Расчеты металлоконструкций и устойчивости
4.2.1 Расчеты и номинальная нагрузка
Производитель МПРП должен выполнить:
a) для расчетов металлоконструкций количественно определить отдельные нагрузки и силы в тех положениях, направлениях и комбинациях, для которых в рассматриваемых элементах возникают наиболее неблагоприятные напряжения;
b) для расчетов устойчивости определить различные положения МПРП и комбинации нагрузок и сил, совместно создающих условия минимальной устойчивости.
Номинальная нагрузка, эквивалентная массе m, должна быть определена из следующей формулы:
![]() ,
,
где ![]() - равна 80 кг (масса взрослого человека);
- равна 80 кг (масса взрослого человека);
![]() - равна 40 кг или более (масса инструментов и материалов);
- равна 40 кг или более (масса инструментов и материалов);
n - допустимое число людей на рабочей платформе.
Минимальная расчетная нагрузка МПРП должна быть 120 кг.
4.2.2 Нагрузки и силы, действующие на конструкцию МПРП
4.2.2.1 Общие положения
Во внимание должны быть приняты следующие нагрузки и силы:
a) силы, вызванные номинальной нагрузкой и массой элементов металлоконструкций (см. 4.2.2.2);
b) ветровые нагрузки (см. 4.2.2.3);
c) силы, создаваемые при воздействии вручную (см.4.2.2.4);
d) нагрузки и силы, возникающие в особых условиях эксплуатации (см. 4.2.2.5).
4.2.2.2 Силы, вызванные номинальной нагрузкой и массой элементов металлоконструкций
4.2.2.2.1 Гравитационные и динамические силы
Гравитационные силы, вызванные номинальной нагрузкой и собственной массой элементов металлоконструкции, должны учитываться как действующие вертикально вниз на центры масс элементов. Эти силы вычисляют путем умножения масс элементов на 1,0![]() .
.
Примечание - Коэффициент ![]() представляет ускорение силы тяжести (9,81 м/с
представляет ускорение силы тяжести (9,81 м/с).
Динамические силы, вызванные ускорением и замедлением собственных масс элементов металлоконструкции, должны быть представлены силами, действующими по линии перемещения центров масс элементов.
Динамические силы, возникающие при выдвижении или втягивании выдвижной части конструкции, должны быть вычислены путем умножения собственных масс элементов металлоконструкции на 0,1![]() (см. приложение B).
(см. приложение B).
Динамические силы, возникающие при передвижении МПРП типов 2 и 3, должны быть вычислены путем умножения структурных масс на фактор z. Фактор z представляет собой ускорение/замедление МПРП при передвижении и его угловое ускорение/замедление при движении через наземные препятствия, например такие, которые происходят во время испытания у бордюра (см. 5.1.4.3.2.2). Фактор z должен быть минимум 0,1, если он не определен путем вычисления или испытания (см. пример вычисления z в приложении E).
4.2.2.2.2 Распределение нагрузки на рабочей платформе
В расчетах предполагается следующее:
- масса каждого человека действует на рабочую платформу как точечная нагрузка, приложенная на расстоянии по горизонтали 0,1 м от верхней внутренней кромки перил. Расстояние между точечными нагрузками должно быть 0,5 м (см. рисунок 1);
|

Рисунок 1 - Номинальная нагрузка (масса человека)
- масса материалов, инструмента и оборудования действует как нагрузка (не более 3 кН/м), равномерно распределенная на 25% площади пола рабочей платформы. Если суммарная нагрузка превышает 3 кН/м, то эту нагрузку распределяют на площадь пола более 25%, выдерживающую указанное давление;
- все эти нагрузки расположены таким образом, что создают наиболее неблагоприятное нагружение.
4.2.2.3 Ветровые нагрузки
4.2.2.3.1 МПРП, эксплуатируемые вне помещений
Все МПРП, используемые на открытом воздухе, считаются подверженными воздействию ветра под давлением 100 Н/м, что эквивалентно скорости ветра 12,5 м/с (6 баллов по шкале Бофорта согласно приложению A).
Предполагается, что силы, возникающие из-за воздействия ветра, действуют в горизонтальном направлении, приложены к центру площади нахождения элементов МПРП, людей, материалов, инструмента и оборудования на рабочей платформе и должны учитываться при определении динамических нагрузок.
Примечание - Эти положения не распространяются на МПРП, предназначенные для эксплуатации только в закрытых помещениях.
4.2.2.3.2 Коэффициенты формы, применяемые для поверхностей, подверженных ветровым нагрузкам
К поверхностям, подверженным действию ветра, в расчетах следует применять коэффициенты формы:
a) L-, U-, T-, I-сечения: 1,6;
b) коробчатые сечения: 1,4;
c) большие плоские поверхности: 1,2;
d) круглые сечения в зависимости от размера: 0,8/1,2;
e) для людей, непосредственно подверженных действию ветра: 1,0.
Если требуется дополнительная информация, особенно касающаяся экранированных участков конструкции, то следует руководствоваться [5]. О защите людей от ветра см. 4.2.2.3.3.
4.2.2.3.3 Площадь поверхности человека (людей), находящегося на рабочей платформе под действием ветровых нагрузок
Полная площадь одного человека, воспринимающая ветровое давление, принимается равной 0,7 м (средняя ширина 0,4 м, умноженная на рост 1,75 м) при расположении центра площади на высоте 1,0 м от пола платформы.
Подверженная действию ветра площадь человека, стоящего на платформе за перфорированным (неперфорированным) участком ограждения высотой 1,1 м, принимается равной 0,35 м. При этом центр площади расположен на высоте 1,45 м от пола платформы.
Число людей, непосредственно подверженных действию ветра, рассчитывается через нормируемую длину стороны рабочей платформы, приходящуюся на одного человека, следующим образом:
a) значение длины стороны рабочей платформы, подверженной воздействию ветра, округляют до ближайшего значения, кратного 0,5 м, и делят на 0,5 м; или
b) если полученное расчетное число людей меньше максимально допустимого числа людей, для данной платформы применяют коэффициент формы 1,0.
Если полученное расчетное число людей больше максимально допустимого для данной платформы, для дополнительного числа людей следует применять коэффициент формы 0,6.
4.2.2.3.4 Сила ветра, действующего на инструменты, материалы и оборудование
Силу ветра, действующего на инструмент, материалы и оборудование на рабочей платформе, в расчетах принимают как 0,03me•![]() и считают направленной горизонтально на высоте 0,5 м от пола платформы.
и считают направленной горизонтально на высоте 0,5 м от пола платформы.
4.2.2.4 Силы, создаваемые при воздействии вручную
Минимальное значение силы, возникающей при воздействии вручную, принимают равным 200 Н для МПРП, предназначенных для подъема одного человека, и 400 Н для подъема более чем одного человека. В расчетах принимают, что сила приложена на высоте 1,1 м от пола платформы. Любое большее разрешенное значение силы должно быть указано изготовителем.
4.2.2.5 Нагрузки и силы, возникающие в особых условиях эксплуатации
Нагрузки и силы, возникающие в особых условиях эксплуатации, создаются следующими факторами:
- перемещение предметов вне рабочей платформы;
- воздействие силы ветра на большие предметы, переносимые по рабочей платформе (см. приложение А);
- воздействие силы со стороны грузоподъемной лебедки или устройства для работы с материалами.
Если пользователь заинтересован в применении особых способов ведения работ и/или особых условий эксплуатации, то нагрузки и силы, возникающие при этом, следует соответствующим образом учитывать в виде поправки к номинальной нагрузке, нагрузке от элементов металлоконструкции, ветровой нагрузке и/или силам, возникающим при воздействии вручную.
Примечание - Для особых условий эксплуатации производитель должен дать соответствующую информацию в руководстве по эксплуатации.
4.2.3 Расчеты устойчивости
4.2.3.1 Силы, создаваемые массой металлоконструкции и номинальной нагрузкой
Значения сил, создаваемых массой металлоконструкции и номинальной нагрузкой, создающие момент опрокидывания или восстанавливающий момент, следует умножать на коэффициент 1,0 и при расчетах принимать действующими вертикально вниз. При работе поворотной части подъемника значения этих сил следует умножать на коэффициент 0,1 и принимать действующими в направлении движения, увеличивающем при этом опрокидывающий момент (см. приложение B).
Производители могут применять коэффициент меньше 0,1 в том случае, если они могут подтвердить измерениями влияние ускорений и замедлений. Если при эксплуатации возникают более резкие ускорения/замедления, следует пользоваться коэффициентом большим, чем 0,1.
При передвижениях МПРП типов 2 и 3, осуществляемых в положении для перемещения, коэффициент 0,1 следует заменять на коэффициент, представляющий силы, возникающие при ускорении и замедлении. Этот коэффициент определяют с помощью расчетов или испытаний (пример расчета испытаний на бордюрном камне см. в приложении C).
Примеры действия сил см. на рисунке 2.
4.2.3.2 Силы ветра
Значения сил ветра следует умножать на коэффициент 1,1. Считается, что они действуют в горизонтальном направлении.
4.2.3.3 Силы при воздействии вручную
Значения сил, прикладываемых людьми к рабочей платформе руками, следует умножать на коэффициент 1,1. Принимается, что они действуют в направлении, создающем наибольший опрокидывающий момент [см. примеры на рисунках 2a)-2d)].
4.2.3.4 Нагрузки и силы, возникающие в особых условиях эксплуатации
Нагрузки и силы, возникающие в особых условиях эксплуатации, следует учитывать в расчетах, определенных производителем.
4.2.3.5 Расчет опрокидывающего и восстанавливающего моментов
Максимальный опрокидывающий и соответствующий ему восстанавливающий моменты следует рассчитывать для наиболее неблагоприятных линий опрокидывания на расчетном уклоне, зависящем от конструкции МПРП.
Линии опрокидывания и допустимый угол установки МПРП в наиболее неблагоприятных условиях применения определяют расчетом опорного контура или принимают согласно [5]. Опорный контур также должен быть установлен в соответствии с [5].
Для сплошных или заполненных пенистой резиной шин линии опрокидывания могут приниматься проходящими на 1/4 ширины пятна контакта шины с поверхностью, считая от наружной границы пятна контакта.
Расчеты следует проводить для МПРП, находящегося в наиболее неблагоприятном положении на максимально допустимом уклоне поверхности плюс 0,5° с учетом неточности установки МПРП. Все нагрузки и силы, которые могут действовать одновременно, следует принимать в расчетах в наиболее неблагоприятных комбинациях.
См. примеры в таблице 1 и на рисунках 2a)-2d).
При расчетах допускается использовать графические методы.
Таблица 1 - Примеры направлений и комбинаций нагрузки и силы для расчетов устойчивости [см. также рисунки 2a)-2d)]
При- мер | Условия работы | Номинальная нагрузка m | Нагрузки от элементов металло- конструкции | Сила, возника- ющая при воздей- ствии вручную, | Ветровые нагрузки W | Схема | ||||
Коэффициент | ||||||||||
1,0 | 0,1 | 1,0 | 0,1 | 1,0 | 0,1 | 1,0 | 0,1 | |||
1 | Подъем (опускание) | V | A | V | A | - | - | H | H |
|
2 | Передвижение | V | S | V | S | - | - | H | H |
|
3 | Передвижение | V | S | V | S | - | - | H | H |
|
4 | Устойчивость в направлении вперед. Стоит неподвижно на уклоне | V | - | V | - | A | A | H | H |
|
5 | Устойчивость в направлении назад. Стоит неподвижно на уклоне | 80 kг V | - | V | - | A | A | H | H |
|
6 | С ограниченным вылетом, устойчивость в направлении вперед. Стоит неподвижно на уклоне, опускание | V | A | V | A | - | - | H | H |
|
7 | На уклоне неподвижно | V | - | V | - | A | A | H | H |
|
8 | Ровная поверхность, неподвижный | 80 kг V | - | V | - | A | A | H | H |
|
Направления: V - вертикальное; H - горизонтальное A - под углом; S - на угол наклона шасси;
| ||||||||||
Примечание - Настоящая таблица не является исчерпывающей. | ||||||||||








В каждом случае вычисленный восстанавливающий момент должен быть больше, чем вычисленный опрокидывающий момент.
В расчетах следует учитывать:
a) допускаемые отклонения при изготовлении деталей и узлов;
b) зазоры в соединении элементов подъемного оборудования;
c) упругие деформации;
d) повреждение любой из шин в случае, если МПРП в рабочем положении опирается на пневматические шины, а также в случае, если МПРП не оснащается стабилизаторами, чтобы исключить зависимость устойчивости от шин, или системой непосредственного мониторинга шин, которая предупреждает машиниста при падении давления по меньшей мере на 25% по сравнению с заданным давлением накачки;
e) эксплуатационная характеристика (точность) систем, чувствительных к нагрузке, к опрокидывающему моменту и управлению положением.
На результаты расчета могут оказывать влияние:
- пики, вызванные кратковременными динамическими воздействиями;
- гистерезис;
- наклон МПРП;
- температура окружающей среды;
- различное расположение и распределение нагрузки на рабочей платформе (см. 4.2.2.2.2).
Определение упругих деформаций проводят экспериментальным путем или с помощью расчетов.
4.2.3.5.1 Динамическая устойчивость
Необходимо испытывать МПРП, чтобы установить, что он остается устойчивым при испытании тормозов (5.1.4.3.2.3), при наезде на бордюр или углубление (5.1.4.3.2.2).
4.2.4 Расчеты конструкции
4.2.4.1 Общие положения
Расчеты металлоконструкции должны подчиняться законам и принципам прикладной механики и сопротивления материалов. При использовании специальных формул должны быть указаны источники, из которых они заимствованы, если эти источники являются общедоступными. При отсутствии источника формулы могут быть выведены из исходных положений, обоснованность которых может быть проверена.
Требования, изложенные в 4.2.2, должны быть учтены для определения нагрузок и сил, учитываемых в расчетах. Использование национального стандарта не должно вносить изменения в эти требования, за исключением случаев, когда требования национального стандарта являются более жесткими.
Упругие деформации не основных конструкций следует принимать во внимание.
Расчетное напряжение не должно превышать допустимых значений. Расчетное значение запасов прочности должно быть не ниже требуемого.
При проектировании конструктивных элементов МПРП, систем привода, органов управления и устройств безопасности необходимо руководствоваться требованиями настоящего стандарта, изложенными в 4.3-4.10.
|

Рисунок 2, лист 1
|

Рисунок 2, лист 2
|

Рисунок 2, лист 3
|

1 - линия опрокидывания; 2 - направление движения; 3 - ограничение вылета; C - максимальный наклон шасси
Рисунок 2 - Примеры максимальной опрокидывающей нагрузки и комбинации силового момента
4.2.4.2 Анализ конструктивного решения
4.2.4.2.1 Общий анализ механического напряжения
Общий анализ напряжений является методом защиты проектируемого подъемника от аварий из-за податливости металла или образования трещин.
Анализ должен быть выполнен для всех элементов и соединений, воспринимающих нагрузку.
Для определения соответствия подъемника указанным требованиям может быть использовано моделирование методом конечных элементов (МКЭ). Модель МКЭ должна быть точно определена и включать в себя объяснение области загрузки, типов нагрузки, ограничение областей и типов ограничений.
Напряжения, возникающие при проведении статического испытания (см. 5.1.4.3.1) и испытания на перегрузку (см. 5.1.4.4), не должны превышать 90% предела текучести материалов.
Возникающие в жестких конструктивных элементах МПРП расчетные механические напряжения не должны превышать 20% минимального предела прочности материала.
Допустимые расчетные напряжения могут быть уменьшены на основании выполненных расчетов.
4.2.4.2.2 Анализ упругой устойчивости
Анализ упругой устойчивости является методом защиты от аварий при потере упругой устойчивости (например, продольных изгибов, деформаций). Этот анализ должен быть проведен для всех элементов, воспринимающих сжимающие нагрузки.
4.2.4.2.3 Анализ усталостных напряжений
Анализ усталостных напряжений является методом защиты от аварий из-за усталости металла, обусловленной колебаниями напряжений. Этот анализ должен быть проведен для всех элементов и соединений, воспринимающих нагрузку, которые являются опасными с точки зрения усталости, включая конструктивные элементы, уровень колебания напряжений и число циклов изменения напряжений. Число циклов изменения напряжений может быть кратным числу циклов нагрузки.
Так как число колебаний напряжений при перемещении не может быть вычислено с определенной степенью точности, напряжения в транспортном положении в элементах, подверженных вибрациям, при перемещении должны быть достаточно низкими, для того чтобы обеспечить фактически бесконечный ресурс до разрушения от усталости (см. также 4.4.6 и 4.6.15).
Число циклов нагрузки для МПРП обычно принимают:
a) легкий прерывистый режим (например, 10 лет, 40 недель в год, 20 ч в неделю, 5 циклов нагрузки в час): 4·10 циклов;
b) тяжелый режим (например, 10 лет, 50 недель в год, 40 ч в неделю, 5 циклов нагрузки в час): 10 циклов.
При определении комбинаций нагрузок допускается, чтобы номинальная нагрузка была снижена с учетом спектрального коэффициента нагрузки в соответствии с рисунком 3; при этом ветровые нагрузки не учитывают.
Примечание - Информация по конструктивному решению систем привода стальным канатом приведена в приложении D.
|

m - масса, кг; - спектральный коэффициент нагрузки
Рисунок 3 - Спектральный коэффициент нагрузки
4.2.4.2.4 Влияния концентрации напряжений и окружающей температуры
Анализ должен принимать во внимание влияние концентраторов напряжений и температуры окружающей среды.
4.2.5 Контроль
Контроль требований в 4.2 должен быть выполнен с помощью проверки конструкции, визуального осмотра, статических испытаний и испытаний на перегрузку.
4.3 Требования к базовому шасси и выносным опорам
4.3.1 Автоматическое устройство безопасности
На МПРП типа 1 с приводным двигателем и МПРП с управляемыми перемещениями с земли должны быть установлены автоматические защитные устройства (в соответствии с 4.11), отключающие любое непреднамеренное передвижение подъемника по рабочей площадке, когда рабочая платформа находится не в транспортном положении.
Блокирующее устройство (например, запирающийся переключатель) должно исключать возможность несанкционированного использования МПРП.
Контроль - проверка конструкции и функциональные испытания.
4.3.2 Наклон базового шасси
Каждый МПРП должен иметь устройство для индикации того, находится ли наклон базового шасси в разрешенных пределах. Это устройство должно быть автоматическим, в соответствии с 4.11 оно должно быть защищено от повреждения и случайного изменения его установки. Регулировка устройства должна осуществляться только с использованием инструмента и должна быть обеспечена возможность ограничения доступа путем опломбирования. Данное устройство должно предотвращать подъем из опущенного положения или между разными положениями, когда наклон шасси выходит за пределы угла, заданного производителем для определенного положения.
Применение отвесных (стрелочных) указателей наклона категорически запрещается.
Для МПРП типа 1 данное устройство может быть заменено спиртовым уровнем. Для МПРП, имеющих выносные опоры с силовым приводом, указатель наклона базового шасси должен быть отчетливо виден с каждого места управления выносными опорами.
Для МПРП типа 2 при передвижении с рабочей платформой в поднятом положении достижение крайних пределов угла наклона должно сопровождаться звуковым сигналом, слышимым в рабочей платформе.
Для МПРП типа 3 при движении из опущенного положения и по достижении пределов, заданных производителем, данное устройство должно предотвращать МПРП от продолжения движения, а для МПРП группы A должно быть запрещено дальнейшее возвышение. Если движение прерывается вследствие превышения предела наклона шасси, то движение допускается при условии, что устойчивость поддерживается или улучшается. Звуковое предупреждение должно быть подано, когда шасси достигло пределов наклона.
Контроль - функциональное испытание.
4.3.3 Стопорные устройства
Все стопорные устройства должны быть застрахованы от непреднамеренного рассоединения сопряженных деталей/узлов (например, подпружиненным штифтом) и потери (например, цепью).
Контроль - визуальный осмотр.
4.3.4 Рычаги управления
Рычаги управления МПРП, управляемых рядом идущим машинистом, и тяги буксирного устройства должны быть надежно прикреплены к базовому шасси.
Контроль - визуальный осмотр и испытание.
4.3.5 Рычаги управления в вертикальной позиции
Если рычаги управления МПРП и тяги в нерабочем состоянии поднимаются в вертикальное положение, должно быть предусмотрено автоматическое устройство для удержания рычагов в этом положении.
Для многоосного базового шасси минимальное расстояние между полностью опущенными рычагами управления или тягами и землей должно быть не менее 120 мм.
Контроль - визуальный осмотр, испытание и измерение.
4.3.6 Выносные опоры
МПРП должны быть оборудованы выносными опорами, предназначенными для выравнивания положения базового шасси. Усилие поднятия (выдвижения) опор или их частей вручную не должно превышать 200 Н. При большем усилии опоры должны иметь гидравлический или иной привод.
Выносные опоры должны быть спроектированы таким образом, чтобы обеспечивать плотное прилегание опорной пяты к поверхности установки, имеющей отклонение от горизонтали на угол до 10°.
Контроль - визуальный осмотр и измерение.
4.3.7 Допустимые положения рабочей платформы
Каждая МПРП должна быть оснащена устройством безопасности в соответствии с 4.11, которое исключает возможность работы рабочей платформы при нахождении вне разрешенных положений, а также если выносные опоры не установлены согласно руководству по эксплуатации.
Подъемники, не имеющие выносных опор, должны быть оборудованы устройством, исключающим действие упругих подвесок.
МПРП, которые проектируются для работы без выносных опор для ограниченного диапазона работ, должны быть оборудованы устройствами безопасности в соответствии с 4.11, которые исключают возможность работы вне той зоны, где допускается работа без выносных опор.
Контроль - проверка конструкции и функциональное испытание.
4.3.8 Предотвращение движения выносных опор с приводом от источников энергии
МПРП, имеющие выносные опоры или систему выравнивания, работающие от источника энергии, должны быть оснащены устройством безопасности согласно 4.11. Оно должно предотвращать их перемещение, если подъемное оборудование и рабочая платформа не находятся в транспортном положении или в пределах разрешенной зоны, определенной в 4.3.7.
Если подъемное оборудование и рабочая платформа находятся в пределах разрешенной зоны, управление выносными опорами не должно создавать неустойчивого положения МПРП.
Контроль - проверка конструкции и функциональное испытание.
4.3.9 Выносные опоры, управляемые вручную
Выносные опоры, управляемые вручную, должны быть сконструированы с учетом предотвращения непреднамеренного движения.
Контроль - проверка конструкции и функциональное испытание.
4.3.10 Выдвижение и втягивание выносных опор
Выдвижение и втягивание выносных опор должны быть ограничены механическими упорами, которыми могут быть гидравлические цилиндры, предназначенные для выполнения этой функции.
Для предотвращения неконтролируемого выдвижения выносных опор в транспортном положении должны быть предусмотрены механические устройства. Выносные опоры должны быть зафиксированы в транспортном положении двумя отдельными запорными устройствами для каждой из опор, по крайней мере одно из которых должно работать автоматически, например гравитационный блокирующий штифт плюс защелка.
Приводные стабилизаторы, удовлетворяющие требованиям 4.3.8 и 4.10, отвечают этому условию транспортирования. Требование предотвращения неконтролируемого движения предъявляют также к МПРП с несъемными выносными опорами, которые увеличивают ширину или длину опорного контура МПРП, и ко всем МПРП, монтируемым на транспортных средствах.
Контроль - проверка конструкции и функциональное испытание.
4.3.11 Указатель положения выносных опор МПРП, установленных на транспортных средствах
МПРП, установленные на транспортных средствах (самоходных и прицепных), должны быть оборудованы указателем, видимым с места расположения органов управления передвижением из кабины, сигнализирующим, что все части выносных опор, поворотной части, лестниц для доступа и рабочей платформы МПРП находятся в транспортных положениях.
Контроль - проверка конструкции и функциональное испытание.
4.3.12 Обзор работы МПРП с поста управления
Машинист, находящийся на посту управления, должен иметь хороший обзор всех движений выносных опор МПРП. Это особенно важно в том случае, когда выносные опоры приводятся в действие с помощью источника энергии.
Органы управления перемещением, находящиеся на базовом шасси, управление которыми проводится с уровня земли, должны быть расположены таким образом, чтобы машинист стоял на расстоянии по меньшей мере 1 м от вертикальной касательной к колесам или гусеницам.
Контроль - визуальный осмотр.
4.3.13 МПРП, управляемые полностью вручную
Требования 4.3.7 не применяются к МПРП, которые управляются полностью вручную и высота подъема пола рабочей платформы которых относительно земли не превышает 5 м (см. 6.3.15).
Для таких МПРП также не является обязательным соблюдение всех требований по безопасности, которые не могут быть выполнены без подвода энергии.
Контроль - проверка конструкции и визуальный осмотр.
4.3.14 Системы блокировки или контроля шарнирно-сочлененных секций
МПРП, оснащенные одной или несколькими шарнирно-сочлененными секциями в системах, которые блокируют или контролируют шарнирно-сочлененные секции для обеспечения устойчивости, должны удовлетворять следующим требованиям:
a) для МПРП типа 1 предохранительное устройство (см. 4.11) должно препятствовать выдвижению телескопических секций до тех пор, пока не будут заблокированы или взяты под контроль шарнирно-сочлененные секции;
b) на МПРП типов 2 и 3, которые имеют средство блокировки или контроля за положением шарнирно-сочлененных секций, предохранительные устройства согласно 4.11 должны быть объединены; в тех случаях, когда в качестве блокирующих или регулирующих устройств используются гидравлические цилиндры, они должны соответствовать требованиям 4.10.
4.3.15 Тормоза МПРП
МПРП должны быть оборудованы тормозами (минимально на двух колесах одной и той же оси), которые включаются в работу автоматически при отключении подачи энергии или выходе из строя, а также должны останавливать и удерживать МПРП в неподвижном положении согласно 4.3.18.
Включение тормозов и удержание их во включенном положении не должно зависеть только от подводимого гидравлического или пневматического давления или электрической энергии.
Контроль - проверка конструкции и функциональное испытание.
4.3.16 Несанкционированное использование
МПРП должны быть оснащены устройством предотвращения несанкционированного использования.
Пример - ключ с блокировкой.
Контроль - функциональное испытание.
4.3.17 Максимальные скорости передвижения при нахождении МПРП не в транспортном положении
Скорости движения МПРП типов 2 и 3, когда они находятся не в транспортном положении, не должны превышать следующих значений:
a) 1,5 м/с для МПРП, установленных на транспортных средствах, когда управление передвижением МПРП осуществляется из кабины;
b) 3,0 м/с для МПРП, установленных на железнодорожном подвижном составе;
c) 0,7 м/с для всех остальных МПРП типов 2 и 3.
Контроль - проверка конструкции и функциональное испытание.
4.3.18 Тормозной путь
МПРП, передвигающиеся с максимальными скоростями, перечисленными в 4.3.17, на максимально допускаемом изготовителем уклоне, должны останавливаться так быстро, чтобы тормозной путь не превышал расстояний, приведенных на рисунке 4. Эти значения получены на основе среднего замедления 0,5 м/с и не включают в себя время реакции машиниста.
Примечание - Минимальный тормозной путь зависит от коэффициента z (см.4.2.2.2.1).
Контроль - проверка конструкции и функциональное испытание.
|

1 - для МПРП, на шасси транспортного средства; 2 - для МПРП, на рельсовом ходу; 3 - для всех других МПРП; v - скорость, м/с; s - дистанция остановки, м
Рисунок 4 - Максимальный тормозной путь для МПРП типов 2 и 3
4.3.19 Максимальная скорость передвижения МПРП с управлением с земли
Максимальная скорость передвижения МПРП, управляемого с земли или с выносного пульта, когда рабочая платформа находится в транспортном положении, не должна превышать 1,7 м/с.
Контроль - функциональное испытание.
4.3.20 Ограждения вокруг поста управления
На МПРП должно быть предусмотрено ограждение для защиты рабочего персонала, находящегося на посту управления или рядом с МПРП на земле или в других местах доступа, от тепловых или механических опасных факторов.
Открывание или снятие этого ограждения должно быть возможно только с применением специального инструмента, хранимого в закрытых и запираемых кабинах или отсеках, или с помощью инструмента или ключей, поставляемых с МПРП.
Контроль - визуальный осмотр и проверка конструкции.
4.3.21 Выхлопы двигателя транспортных средств
Выхлопы от работы двигателя внутреннего сгорания должны быть направлены в сторону, противоположную посту управления.
Вредные (загрязняющие) вещества выхлопных газов не должны превышать норм, установленных в [7].
Контроль - визуальный осмотр и измерение.
4.3.22 Горловины для заправки рабочей жидкости (РЖ)
Заправочные горловины газовых и жидкостных резервуаров для не огнестойких жидкостей должны быть расположены таким образом, чтобы не возникало возгорание в результате протекания РЖ на горячие части машины (например, на выпускной трубопровод).
Контроль - проверка конструкции и визуальный осмотр.
4.3.23 Крепление аккумуляторных батарей
Аккумуляторные батареи и резервуары всех МПРП должны быть закреплены таким образом, чтобы не происходило их смещения. Должны быть приняты меры к тому, чтобы в случае опрокидывания МПРП комплект аккумуляторных батарей оставался закрепленным во избежание риска травмирования машиниста, которое может произойти из-за смещения аккумуляторных батарей или выплескивания электролита.
В ящике, отсеке или крышке отсека для батарей должны быть предусмотрены соответствующие вентиляционные отверстия, с тем чтобы в местах нахождения машиниста не происходило накопление опасной концентрации газов.
Примечание - Расположение вентиляционных отверстий, обеспечивающих свободный выход образующихся газов, обычно является достаточным, если соблюдается условие: поперечное сечение отверстий в квадратных миллиметрах (мм), должно быть равно произведению, получаемому умножением 5-часовой номинальной емкости батарей в ампер-часах (А/ч) на половину числа элементов аккумулятора. Этот результат расчета, однако, не учитывает условий зарядки.
Контроль - визуальный осмотр.
4.3.24 Сход с рельсового пути
4.3.24.1 Общие положения
Следующие требования относятся к предотвращению схода с рельсов соответствующих МПРП во время работы и при движении по рельсовому пути в рабочем положении.
При движении МПРП по рельсовому пути в рабочем положении их колеса должны быть нагружены в достаточной степени, чтобы избежать схода с рельсов.
4.3.24.2 Защищенность от схода с рельсов
МПРП, с конструкциями, которые являются подвижными и влияют на возможность схода с рельсов, должны иметь достаточную защищенность, чтобы оставаться на рельсах.
a) Для МПРП, имеющих одну и ту же подвеску в стационарном режиме и режиме передвижения, защищенность от схода с рельсов в рабочих условиях считается обеспеченной, если одновременно:
- подвеска не блокируется, или для МПРП с трехопорной подвеской по меньшей мере одна из трех опор может поворачиваться свободно, или МПРП (включая колесные пары) является достаточно гибким, чтобы компенсировать изгиб пути, и
- нет жесткой связи между несколькими соединенными частями МПРП, которые могли бы препятствовать свободе поворота или свободному перемещению в вертикальном и поперечном направлениях в пределах разрешенной свободы перемещения;
b) Для МПРП, имеющих различную конструкцию подвески в стационарном режиме и режиме передвижения, защищенность от схода с рельсов доказывают путем статических испытаний для рабочих конфигураций согласно 4.3.24.3. Ни в стационарном режиме, ни в движении по рельсовому пути не должно быть возможности изменения рабочих конфигураций, если это может вызывать момент нагрузки, достигающий или превышающий 90% номинального значения, в новой конфигурации.
Если одно из этих условий не соблюдается, то защищенность от схода с рельсов должна быть доказана путем стационарных испытаний в соответствии с 4.3.24.3.
4.3.24.3 Расчетные случаи нагружения для предотвращения схода с рельсов во время движения
Для установленных на рельсовом пути МПРП, у которых центр тяжести при движении по рельсовому пути оказывается смещенным, невозможность отрыва колеса от рельса должна быть доказана путем проведения статических испытаний. При наиболее неблагоприятном сочетании положения МПРП и нагрузки, а также наихудшей комбинации поперечного уклона пути, продольного уклона и скручивания ни одно из колес не должно оторваться от рельса в случае приложения нагрузки, превышающей номинальную в 1,5 раза.
Кроме того, в наиболее неблагоприятном случае и при номинальной нагрузке на МПРП нагрузка ни на одно из колес не должна уменьшаться более чем на 60% нормальной.
4.3.24.4 Ограничение использования МПРП
Если предотвращение схода с рельсов не гарантируется для всех рабочих конфигураций, область применения МПРП должна быть ограничена, и это должно быть отражено в технической документации и руководствах по эксплуатации, а также в уведомлениях на МПРП.
4.3.24.5 Установка и снятие с рельсов
Документация с описанием установки МПРП на рельсовый путь или снятия с него должна содержать требования об обеспечении невозможности случайного движения МПРП в процессе упомянутой выше операции. Для этого МПРП должна иметь по крайней мере одну затормаживаемую ось (с применением тормозов), способную удержать МПРП на рельсовом пути при самом неблагоприятном уклоне и при контакте либо с рельсами, либо с землей.
В случае, когда устанавливается кнопка аварийного останова, она должна приводить в действие тормоза, чтобы остановить вращение затормаживаемой оси. Кнопки аварийного останова (обычно переключатели с красными грибовидными головками) устанавливаются на МПРП и снаружи на шасси некоторых МПРП. Действие кнопок следует проверить после их установки, чтобы убедиться в работе тормозов при всех возможных конфигурациях транспортного средства, в том числе на рельсах или вне рельсового пути.
Контроль - функциональное испытание.
4.3.25 Выбор шасси транспортного средства, на котором монтируется МПРП
Для МПРП, монтируемых на транспортных средствах, тип и технические данные базового шасси должны соответствовать техническим требованиям изготовителя МПРП. Условия установки оборудования МПРП должны соответствовать требованиям изготовителя базового шасси.
Ходовые колеса передвижных МПРП, предназначенные для транспортирования по автомобильным дорогам, должны иметь стандартные пневмошины.
МПРП должны быть оборудованы стояночным тормозом и отвечать требованиям правил, установленных для дорожного движения.
МПРП, монтируемые на рельсовом ходу, должны быть оборудованы устройствами, воздействующими на рельсы для предотвращения схода с них, и устройствами для удаления препятствий, находящихся на рельсах (например, устройство для очистки колеи и/или головок рельсов).
Для подъемников, установленных на железнодорожном подвижном составе, тормоза на механизме передвижения должны отвечать требованиям правил, установленных для железнодорожного транспорта.
4.4 Требования к подъемному оборудованию
4.4.1 Способы предотвращения опрокидывания и превышения допускаемых напряжений
4.4.1.1 Общие положения
Для безопасного выполнения работ МПРП должны быть оборудованы устройствами (приборами) управления безопасностью:
- системой, чувствительной к нагрузке (например, ограничителем предельного груза);
- системой управления положением подъемного оборудования (например, устройством ориентации пола рабочей платформы в горизонтальном положении);
- системой, чувствительной к опрокидывающему моменту, ограничивающей зону обслуживания.
В дополнение к положениям в 4.2.3.5 при расчетах опрокидывающего и восстанавливающих моментов следует учитывать возможности комплексного решения безопасности управления, снижающего риск опрокидывания и превышения допускаемых напряжений.
Примером выбора такого решения могут служить равноценные решения, приведенные в таблице 2.
Примечание - Средства управления нагрузкой и моментами не способны предохранять от перегрузки, которая чрезвычайно превышает номинальную нагрузку.
Таблица 2 - Пример выбора решения снижения риска опрокидывания и превышения допускаемых напряжений
Группа МПРП | Система, чувствительная к нагрузке, и система управления положением (4.4.1.2 и 4.4.1.3) | Система, чувствительная к нагрузке, и система, чувствительная к опрокидывающему моменту (4.4.1.2 и 4.4.1.4) | Система, чувствительная к опрокидывающему моменту (4.4.1.4 и 4.4.1.6) | Система управления положением (4.4.1.3, 4.4.1.5 и 4.4.1.6) |
A | X | - | - | X |
B | X | X | X | X |
4.4.1.2 Система, чувствительная к нагрузке
Система, чувствительная к нагрузке, является устройством безопасности, предотвращающим перегрузку рабочей платформы более чем на 10% номинальной нагрузки и отключающим механизмы вылета и высоты подъема.
Система должна выполнять следующие действия:
a) срабатывание после достижения номинальной нагрузки и до превышения 120% номинальной нагрузки;
b) при превышении номинальной нагрузки включить звуковой и визуальный сигналы (например, красную лампочку). Звуковой сигнал должен быть отчетливо слышен на каждом месте расположения органов управления и на рабочей платформе. Лампочка должна мигать все время, пока не будет снята перегрузка, а звуковой сигнал повторяться с интервалом не менее 1с;
c) если система, чувствительная к нагрузке, сработала во время перемещения рабочей платформы, то возможность перемещения должна оставаться;
Примечание - Это перемещение может быть использовано для выпуска застрявших людей.
d) возобновление любого движения только после снижения нагрузки до номинальной.
Для МПРП с ручным приводом (группы А типа 1) допускается, чтобы устройство, чувствительное к нагрузке, действовало только при подъеме вверх из положения доступа.
В этом случае для испытания на перегрузку, заданного в 5.1.4.3, испытательная нагрузка должна составлять 150% номинальной нагрузки.
Для МПРП группы A устройство, чувствительное к нагрузке, не должно включаться до тех пор, пока рабочая платформа не поднимется вверх более чем на 1 м или 10% высоты подъема относительно транспортного положения. Если считывается состояние перегрузки на этой высоте или выше, то дальнейший подъем должен быть предотвращен.
Система, чувствительная к нагрузке, должна быть в соответствии с 4.11.
Аварийная блокировка должна оставаться постоянно действующей, включая периоды времени активизации регулирования нагрузки.
4.4.1.3 Система управления положением подъемного оборудования
4.4.1.3.1 Общие положения
Система управления положением подъемного оборудования, является устройством безопасности, предотвращающим опрокидывание МПРП или превышение допускаемых напряжений в металлоконструкции МПРП.
Допустимые положения подъемного оборудования должны быть ограничены автоматическими механическими упорами (см. 4.4.1.3.2), немеханическими ограничивающими устройствами (см. 4.4.1.3.3) или электрическими устройствами безопасности (см. 4.11.3).
4.4.1.3.2 Механические ограничивающие устройства
Конструкция механических ограничивающих устройств должна выдерживать без возникновения остаточных деформаций наибольшие прикладываемые силы. Если для этой цели предназначены гидравлические цилиндры, они должны соответствовать этим требованиям.
4.4.1.3.3 Немеханические ограничивающие устройства
Немеханические ограничивающие устройства должны отслеживать положения подъемного оборудования и действовать посредством систем управления на ограничители движений для рабочей зоны.
Это устройство должно быть продублировано устройством безопасности согласно требованиям п.4.11.
4.4.1.4 Система, чувствительная к опрокидывающему моменту
Система, чувствительная к опрокидывающему моменту, должна предотвращать опрокидывание МПРП. Система, чувствительная к опрокидывающему моменту, должна работать следующим образом:
a) при достижении критического значения опрокидывающего момента (см.4.2.3.5) должны подаваться предупреждающие звуковой и визуальный сигналы и не должны допускаться дальнейшие движения, кроме уменьшающих опрокидывающий момент;
b) управление этой системой должно соответствовать требованиям 4.11.
4.4.1.5 Критерии устойчивости для рабочей платформы ограниченных размеров
МПРП, вмещающие до двух человек, могут быть исключены из требований к системам, чувствительным к нагрузке и опрокидывающему моменту, если они удовлетворяют следующим дополнительным критериям устойчивости:
a) наружные размеры рабочей платформы, включая любое расширение, но исключая ступеньки, которые могут присутствовать на внешних поверхностях рабочей платформы, по любому горизонтальному сечению:
- для одного человека - площадь поперечного сечения не должна превышать 0,6 м без боковой поверхности более чем 0,85 м;
- для двух человек - площадь поперечного сечения не должна превышать 1,0 м без боковой поверхности более чем 1,4 м.
b) при статических испытаниях, оговоренных в 5.1.4.3.1, испытательная нагрузка должна составлять 150% номинальной нагрузки, определенной в 4.2.1. В остальном следует руководствоваться требованиями 4.2.2.
4.4.1.6 Критерии перегрузки для рабочей платформы ограниченных размеров
МПРП, вмещающие до двух человек, могут быть исключены из требований к системам, чувствительным к нагрузке, если они удовлетворяют следующим критериям:
a) наружные размеры рабочей платформы, исключая ступеньки, которые могут присутствовать на наружных поверхностях рабочей платформы, должны быть такими, чтобы:
- для одного человека - площадь поперечного сечения не превышала 0,6 м без боковой поверхности более чем 0,85 м;
- для двух человек - площадь поперечного сечения не превышала 1,0 м без боковой поверхности более чем 1,4 м;
b) при испытаниях на перегрузку, установленных в 5.1.4.4, испытательная нагрузка должна составлять 150% номинальной нагрузки.
4.4.1.7 Переменная рабочая зона с более чем одной номинальной нагрузкой
Для МПРП с более чем одним значением номинальной нагрузки и более чем одной рабочей зоной должен быть установлен индикатор выбранной комбинации, который должен быть виден на рабочей платформе. Допускается выбор комбинации с помощью ручного переключения в том случае, если рабочая платформа находится в рабочей зоне.
МПРП должен быть оборудован системой, чувствительной к нагрузке, и системой, чувствительной к опрокидывающему моменту (см. 4.4.1.2 и 4.4.1.4), или системой, чувствительной к нагрузке, и системой управления положением (см. 4.4.1.2 и 4.4.1.3).
4.4.1.8 Переменная рабочая зона с одной номинальной нагрузкой
Для МПРП с одним значением номинальной нагрузки и переменной рабочей зоной (например, МПРП с переменным положением выносных опор) допускается выбор зон с помощью ручного переключения.
В этом случае выбор может быть сделан, только если подъемное оборудование находится в транспортном положении (см. 4.4.1.3).
4.4.1.9 Контроль
Контроль требований 4.4.1 должен быть выполнен путем проверки конструкции (см. 5.1.2) и проведения испытаний в соответствии с 5.1.4.
4.4.2 Последовательность работы элементов подъемного оборудования
При необходимости определенной последовательности выдвижения или втягивания элементов подъемного оборудования для избежания перегрузки эта последовательность должна осуществляться автоматически.
Контроль - проверка конструкции, визуальный осмотр и функциональное испытание.
4.4.3 Защемление между подвижными частями МПРП
Защемление между подвижными частями МПРП, находящимися в пределах досягаемости людей на рабочей платформе или стоящих рядом с МПРП на уровне земли, должно быть исключено путем обеспечения безопасных зазоров или с помощью ограждений в соответствии с [8].
В случае, когда расстояние по вертикали между внешними концами рычагов ножничного типа уменьшается до 50 мм, снижение должно быть автоматически остановлено устройством безопасности. Дальнейшее перемещение вниз должно быть возможным после задержки на 3 с и на пониженной скорости. Команда машиниста на дальнейшее опускание должна сопровождаться различимым звуковым сигналом тревоги и различимым визуальным предупреждением об операции по меньшей мере за 1,5 с до начала опускания выдвижной части. Звуковой сигнал тревоги и визуальное предупреждение должны подаваться на протяжении всего дальнейшего опускания.
Если средняя скорость снижения не превышает 0,2 м/с, нет необходимости в уменьшении скорости.
Контроль - визуальный осмотр и измерение.
4.4.4 Удерживание подъемного оборудования при проведении технического обслуживания
При поднятии рабочей платформы МПРП для проведения очередного технического обслуживания должны быть предусмотрены средства, позволяющие удерживать подъемное оборудование в требуемом положении.
Эти средства должны иметь возможность поддерживать разгруженную (ненагруженную) рабочую платформу и быть управляемыми из безопасного положения, а их работа не должна причинять повреждений каким-либо частям МПРП. Они должны удерживать рабочую платформу даже в случае выхода из строя системы подъема/опускания.
Контроль - проверка конструкции, визуальный осмотр и функциональное испытание.
4.4.5 Скорость движения подъемного оборудования
Если ускорения или замедления меньше или равны 0,25 g, то скорость движения подъемного оборудования МПРП не должна превышать следующих значений:
a) 0,8 м/с для подъема и опускания рабочей платформы;
b) 0,8 м/с для выдвижения/втягивания телескопической стрелы;
c) 1,4 м/с для поворота или вращения (горизонтальная скорость внешнего края рабочей платформы, измеренная на максимальном размахе).
Однако если ускорения или замедления больше 0,25![]() , то скорость движения подъемного оборудования не должна превышать следующих значений:
, то скорость движения подъемного оборудования не должна превышать следующих значений:
d) 0,4 м/с для подъема и опускания рабочей платформы;
e) 0,4 м/с для выдвижения/втягивания телескопической стрелы;
f) 0,7 м/с для поворота или вращения (горизонтальная скорость на внешней кромке рабочей платформы, измеренная на максимальном вылете).
Торможение, вызванное аварийной остановкой, не должно учитываться при измерении силы ![]() . Ускорение и замедление, включая ситуацию аварийной остановки, должны приниматься во внимание при проектировании.
. Ускорение и замедление, включая ситуацию аварийной остановки, должны приниматься во внимание при проектировании.
Контроль - функциональное испытание.
4.4.6 Поддержка в транспортном положении
Подъемное оборудование в транспортном положении должно быть закреплено для снижения вибрации при транспортировании (см.4.2.4.2.3).
Контроль - проверка конструкции, визуальный осмотр.
4.5 Требования к системам привода подъемного оборудования
4.5.1 Общие положения
4.5.1.1 Самопроизвольные перемещения
Системы привода подъемного оборудования МПРП должны быть спроектированы и изготовлены таким образом, чтобы предотвращать любые самопроизвольные перемещения подъемного оборудования.
Контроль - проверка конструкции и функциональное испытание.
4.5.1.2 Защита подъемного оборудования от перегрузки избыточной энергией источников энергии привода
Во всех системах привода должна быть предусмотрена ее защита от перегрузки избыточной энергией, если источник энергии может вырабатывать мощность более, чем требуется для привода подъемного оборудования и/или системы привода рабочей платформы (например, в виде устройства, ограничивающего давление).
Применение соединений фрикционного типа не обеспечивает выполнение этого требования.
Контроль - проверка конструкции.
4.5.1.3 Выход из строя приводной цепи или ремня
Приводные цепи и ремни допускается использовать в системах привода только в том случае, когда при выходе из строя цепи или ремня автоматически предотвращаются самопроизвольные перемещения подъемного оборудования. Это может быть достигнуто при применении самоблокирующейся коробки передач или контролем за состоянием цепи (ремня) с помощью устройства безопасности согласно 4.11.
Применение плоских ремней не допускается.
Контроль - проверка конструкции и функциональное испытание.
4.5.1.4 Отдача рукояток управления
Системы привода с ручным управлением должны быть спроектированы и изготовлены таким образом, чтобы предотвращать отскок назад рукояток управления.
Контроль - проверка конструкции, визуальный осмотр и функциональное испытание.
4.5.1.5 Системы ручного привода и привода с подводом энергии для одного и того же движения
Если для одного и того же движения предусмотрены системы привода как вручную, так и с подводом энергии (например, в системе ручного аварийного управления), и если существует риск получения повреждений при включении обеих систем одновременно, это должно быть предотвращено (например, с помощью блокировок, запорных или перепускных клапанов).
Контроль - проверка конструкции и функциональное испытание.
4.5.1.6 Тормозная система для всех приводов
В составе всех приводов должна быть предусмотрена тормозная система. Для движений подъема эта система должна представлять собой автоматический замок или самоблокирующееся устройство. Тормозная система должна автоматически включаться при прекращении подачи энергии к приводу. Коэффициент запаса торможения для тормозных систем с механическим приводом должен быть не менее 1,5.
Тормозная система должна обеспечивать возможность того, чтобы рабочая платформа, нагрузка в которой составляет 110% номинальной нагрузки, могла быть остановлена и удержана в любом положении при всех видах работ. Тормозная система должна быть защищена от самопроизвольного размыкания.
Механизмы подъема с механическим приводом должны быть снабжены тормозами нормально замкнутого типа, автоматически размыкающимися при включении, или другими устройствами, исключающими самопроизвольное опускание (перемещение) рабочей платформы.
Контроль - проверка конструкции и функциональное испытание.
4.5.2 Система привода стальным канатом
4.5.2.1 Безопасность системы привода стальным канатом
4.5.2.1.1 Общие положения
МПРП может иметь одну или две системы привода стальным канатом.
Стальной канат, диаметры барабанов и блоков должны быть рассчитаны по нормативным документам и/или в соответствии с приложением C, исходя из предположения, что вся нагрузка воспринимается одной системой стального каната. Не допускается применение системы привода за счет сил трения.
Системы привода стальным канатом должны иметь устройство или систему, которые в случае выхода из строя системы привода стальным канатом:
- ограничивают вертикальное перемещение рабочей платформы с полной нагрузкой в пределах 0,2 м;
- сигнализируют о нарушении нормального функционирования.
Это требование должно быть удовлетворено с помощью механического устройства системы безопасности (см.4.5.2.1.2) либо дополнительного канатного привода (см. 4.5.2.1.3).
Контроль - проверка конструкции.
4.5.2.1.2 Механическое устройство системы безопасности
МПРП с рабочими платформами, которые поднимаются и опускаются с помощью стальных канатов, должны быть оборудованы устройством безопасности согласно 4.11, которое прерывает движение, вызывая ослабление каната. Движения в обратном направлении при этом допускаются. Это устройство не является обязательным, если невозможно ослабление каната.
Механическое устройство безопасности, включение которого в работу производится поворотной частью МПРП, должно плавно затормозить рабочую платформу с номинальной нагрузкой и удерживать ее в случае выхода из строя системы привода стальным канатом. Среднее замедление не должно превышать 1,0![]() . Все используемые в этом устройстве пружины по конструкции должны быть работающими на сжатие, с закрепленными концами и направляющими.
. Все используемые в этом устройстве пружины по конструкции должны быть работающими на сжатие, с закрепленными концами и направляющими.
Контроль - проверка конструкции и функциональное испытание.
4.5.2.1.3 Вспомогательная система привода стальным канатом
МПРП может иметь вспомогательную систему привода стальным канатом, которую следует проектировать в соответствии с требованиями к первой системе с использованием:
a) устройства для передачи приблизительно одинакового натяжения на две системы привода стальным канатом, таким образом удваивая коэффициент запаса прочности, или
b) устройства, обеспечивающего передачу на вторую систему менее половины нагрузки в обычных условиях эксплуатации, но способного воспринять полную нагрузку, если произойдет отказ первой системы, или
c) барабана и блоков большего диаметра для увеличения усталостного ресурса второй системы до срока, по меньшей мере вдвое превышающего расчетный срок службы первой системы.
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.2 Грузовые канаты
Применяемые в МПРП стальные канаты должны отвечать требованиям настоящего стандарта. Канаты должны иметь свидетельство предприятия-изготовителя. При получении канатов без свидетельства об испытаниях их необходимо испытать в установленном порядке.
Использование стальных канатов без свидетельства или не прошедших испытания на предприятии - изготовителе подъемника не допускается.
Коэффициент запаса прочности каната должен быть не менее 9. В следящей системе ориентации рабочей платформы, состоящей из двух параллельных ветвей и имеющих уравнительное устройство, коэффициент запаса прочности должен быть не менее 4,5 для каждой ветви следящей системы.
Грузовые канаты [9] должны изготавливаться из оцинкованных стальных проволок или эквивалентных им материалов и иметь следующие характеристики:
a) минимальный диаметр - 8 мм;
b) минимальное число проволок - 114 шт.;
c) прочность на разрыв:
- минимальная - 1570 Н/мм;
- максимальная - 2160 Н/мм;
d) ресурс разрушения от усталости - в соответствии с областью применения (см. приложение С);
e) коррозийная стойкость - эквивалентна оцинкованной стали;
f) соответствие требованиям к соотношению диаметров блоков и каната (см. приложение С).
Минимальная разрушающая нагрузка должна быть указана в свидетельстве.
Стальные канаты, используемые непосредственно для подъема или поддерживания рабочей платформы, не должны иметь мест соединений (сращиваний).
Стальные канаты с другими характеристиками могут быть использованы при условии принятия соответствующих мер безопасности.
Контроль - проверка конструкции, испытания.
4.5.2.3 Присоединение в точке крепления более одного стального каната
Если в точке крепления присоединяется более чем один стальной канат, должно быть предусмотрено устройство для приблизительного уравнивания натяжения канатов.
Должна быть предусмотрена возможность подтягивания стальных канатов.
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.4 Повторное натяжение стальных канатов
Должна быть предусмотрена возможность повторного натяжения стальных канатов.
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.5 Крепление концов стальных канатов
Для крепления концов стальных канатов могут применяться исключительно:
- заплетки;
- алюминиевые зажимы;
- зажимы из стали, не подвергавшейся старению;
- крепление во втулке клином.
Для крепления концов, воспринимающих нагрузку стальных канатов, не допускается применение в качестве зажимов U-образных болтов.
Крепление конца стального каната должно выдерживать усилие не менее 80% от минимальной разрушающей нагрузки стального каната.
Контроль - проверка конструкции и испытание.
4.5.2.6 Визуальная проверка крепления концов стальных канатов
Визуальная проверка креплений концов стальных канатов должна быть возможна без снятия канатов или полного демонтажа элементов металлоконструкции МПРП.
При невозможности использования смотровых люков производители должны включать в документацию МПРП подробную инструкцию для проведения проверки.
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.7 Устройства безопасности рабочих платформ МПРП, поднимаемых и опускаемых канатами
МПРП с платформами, которые поднимаются и опускаются стальными канатами, должны быть оснащены устройством обеспечения безопасности согласно 4.11. Эти устройства останавливают перемещения при ослаблении натяжения канатов. Перемещения в обратном направлении должны быть возможными. Такое устройство не требуется, если нет ослабления натяжения канатов.
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.8 Канавки на канатных барабанах и предотвращение спадания каната с барабана
Канатные барабаны должны иметь канавки, предотвращающие смятие каната. Барабаны должны быть снабжены устройствами для предотвращения спадания каната с барабана, например ребордами на барабане, возвышающимися на высоту не менее двух диаметров каната над верхним слоем навитого каната.
Контроль - визуальный осмотр.
4.5.2.9 Слои каната
На барабан, если не используется специальная система намотки (например, канатоукладчик), может быть навит только один слой каната.
Контроль - визуальный осмотр.
4.5.2.10 Витки каната
Канатоемкость барабана должна быть такой, при которой в случае если подъемное оборудование и/или рабочая платформа находятся в своем крайнем положении, на барабане должны оставаться навитыми не менее двух витков каната, не считая витков, находящихся под зажимным устройством.
Контроль - визуальный осмотр и функциональное испытание.
4.5.2.11 Крепление каната к барабану
Каждый стальной канат должен быть надежно прикреплен к барабану. Крепление должно выдерживать усилие не менее 80% - минимальной разрушающей нагрузки каната.
Контроль - визуальный осмотр и функциональное испытание.
4.5.2.12 Самопроизвольное спадание каната
Должны быть предусмотрены средства, предотвращающие самопроизвольное спадание стальных канатов при набегании их на реборды барабанов и блоков и в случае ослабления каната (например, на барабане - ребордами, выступающими на высоту не менее двух диаметров каната над верхним слоем навитого каната).
Контроль - проверка конструкции и визуальный осмотр.
4.5.2.13 Поперечное сечение канавок барабана
Поперечное сечение нижней части канавок на барабанах и блоках проволочных канатов должно быть образовано дугой окружности в пределах угла не менее 120°.
Контроль - проверка конструкции и измерение.
4.5.3 Системы привода цепью
Не допускается применение круглозвенных цепей. Допускается использовать пластинчатые цепи.
Минимальная разрушающая нагрузка цепи должна быть указана в свидетельстве испытания предприятия-изготовителя и соответствовать усилиям в системе привода цепью. При отсутствии свидетельства без испытания на предприятии-изготовителе цепь не может быть допущена к применению в системе.
4.5.3.1 Ограничение вертикального перемещения в случае выхода из строя
4.5.3.1.1 Общие положения
Коэффициент запаса прочности цепи должен быть не менее 9. В следящей системе ориентации рабочей платформы, состоящей из двух параллельных ветвей и имеющих уравнительное устройство, коэффициент запаса прочности должен быть не менее 4,5 для каждой ветви следящей системы.
МПРП, поднимающиеся и опускающиеся с помощью цепей, должны быть оборудованы устройством или системой безопасности согласно 4.11, которое:
- прерывает движение, вызывая ослабление цепи, и ограничивает вертикальное перемещение рабочей платформы с полной нагрузкой в пределах 0,2 м;
- сигнализирует о нарушении нормального функционирования.
Это требование должно быть удовлетворено для любой из приводных систем, заданных в 4.5.3.1.2 и 4.5.3.1.3.
Контроль - контроль применяемости, испытания.
4.5.3.1.2 Система привода одной цепью
Система привода одной цепью должна иметь коэффициент запаса прочности не менее 9 и механическое устройство безопасности согласно 4.11, включение которого в работу проводится поворотной частью МПРП. Это устройство безопасности должно плавно затормозить рабочую платформу с номинальной нагрузкой и удерживать ее в случае выхода из строя системы привода цепью.
Среднее замедление не должно превышать 1,0![]() . Все используемые в этом устройстве пружины по конструкции должны быть работающими на сжатие, с закрепленными концами и направляющими.
. Все используемые в этом устройстве пружины по конструкции должны быть работающими на сжатие, с закрепленными концами и направляющими.
Контроль - проверка конструкции, визуальный осмотр и функциональное испытание.
4.5.3.1.3 Система привода двумя цепями с равным натяжением цепи
Система привода двумя цепями должна отвечать следующим требованиям:
a) равное натяжение
В системе привода двумя цепями с равным натяжением цепи, включая систему ориентации рабочей платформы, каждая цепь должна иметь коэффициент запаса прочности не менее 4,5 (суммарный - 9) и устройство для передачи приблизительно равного натяжения на две системы, или соответствовать требованиям в b).
Неисправность в первой цепи должна быть обнаружена самой системой;
b) неравное натяжение
В системе привода двумя цепями при неравном натяжении первая система привода двумя цепями должна иметь коэффициент запаса прочности не менее 4,5 (суммарный - 9 при условии приложения полной нагрузки). Эта система должна иметь также устройство, обеспечивающее передачу на вторую систему менее половины нагрузки в обычных условиях эксплуатации, но способное воспринять полную нагрузку, если произойдет отказ первой системы.
Неисправность в первой цепи должна быть обнаружена самой системой.
Контроль - проверка конструкции, визуальный осмотр и функциональное испытание.
4.5.3.2 Присоединение в точке крепления более одной цепи
Если в точке крепления присоединяется более чем одна цепь, должно быть предусмотрено устройство, уравнивающее натяжение цепей.
Контроль - проверка конструкции и визуальный осмотр.
4.5.3.3 Натяжение цепей
В системе цепного привода должна быть предусмотрена возможность подтягивания цепей.
Контроль - проверка конструкции и визуальный осмотр.
4.5.3.4 Прочность соединения цепи с ее концевым звеном
Соединение между цепью и ее концевым звеном должно выдерживать усилие 100% от минимальной разрушающей силы цепи.
Контроль - проверка конструкции и/или испытание.
4.5.3.5 Визуальный осмотр цепей и их концевых звеньев
Визуальный осмотр цепей и их концевых звеньев должен быть возможен без снятия цепей или полного демонтажа элементов металлоконструкции МПРП.
При невозможности использования визуального осмотра смотровых люков в документацию МПРП должна быть включена подробная инструкция для проведения проверки.
Контроль - проверка конструкции и визуальный осмотр.
4.5.3.6 Устройство безопасности для МПРП, подъем и опускание рабочих платформ которых проводятся цепями
МПРП с рабочими платформами, которые поднимаются и опускаются с помощью цепей, должны быть оборудованы устройством безопасности согласно 4.11, которое прерывает движение, вызывая ослабление цепи. Движения в обратном направлении при этом допускаются. Это устройство не является обязательным, если невозможно создать ослабление цепи.
Контроль - проверка конструкции и функциональное испытание.
4.5.3.7 Самопроизвольное спадание цепи
В системе привода цепью должны быть предусмотрены устройства для предотвращения самопроизвольного спадания цепей со звездочек или блоков, даже для не натянутой цепи.
Контроль - проверка конструкции и визуальный осмотр.
4.5.4 Система привода ходовым винтом
4.5.4.1 Расчетное напряжение и материал ходового винта и гайки
Расчетное напряжение ходового винта и гаек не должно превышать 1/6 предела прочности при растяжении (временного сопротивления) используемого материала. Сопротивление материала ходового винта абразивному износу должно быть выше, чем материала гайки, воспринимающей от него нагрузку.
Контроль - проверка конструкции.
4.5.4.2 Крепление ходового винта к платформе
Механизм ходового винта должен быть спроектирован таким образом, чтобы предотвратить отсоединение рабочей платформы от механизма при нормальной эксплуатации.
Контроль - визуальный осмотр.
4.5.4.3 Гайка, воспринимающая нагрузку, и предохранительная гайка
Каждый ходовой винт должен иметь гайку, воспринимающую нагрузку, и ненагруженную предохранительную гайку. Предохранительная гайка должна нести нагрузку только в том случае, если гайка, воспринимающая нагрузку, вышла из строя. Не допускается подъем рабочей платформы, если предохранительная гайка находится под нагрузкой.
Должна быть предусмотрена возможность контроля износа гаек, воспринимающих нагрузку, и проведения их замены без демонтажа привода.
Контроль - проверка конструкции, визуальный осмотр и измерение.
4.5.4.4 Контроль износа на гайках
Должна быть предусмотрена возможность контроля износа гаек, воспринимающих нагрузку, и проведения их замены без демонтажа привода.
4.5.5 Зубчато-реечные системы привода
4.5.5.1 Расчетное напряжение зубчатых реек и шестерен
Расчетное напряжение зубчатых реек и шестерен не должно приниматься более 1/6 предела прочности при растяжении (временного сопротивления) применяемого материала.
Контроль - проверка конструкции.
4.5.5.2 Устройство безопасности и регулятор скорости
Зубчато-реечные приводы должны иметь устройство безопасности, включение которого в работу должно проводиться регулятором скорости. Это устройство безопасности должно плавно затормозить рабочую платформу с номинальной нагрузкой и удерживать ее в случае выхода из строя подъемного механизма. Среднее замедление не должно превышать 1,0g. Если устройство безопасности включено в работу, подача энергии должна быть прервана автоматически.
Контроль - проверка конструкции и функциональное испытание.
4.5.5.3 Устройство для предотвращения расцепления шестерни
В дополнение к обычным направляющим роликам рабочей платформы должны быть предусмотрены принудительные и постоянно действующие устройства для предотвращения выхода из зацепления с зубчатой рейкой шестерни любого приводного устройства или устройства безопасности. Эти устройства должны обеспечивать ограничение осевого перемещения шестерни таким образом, чтобы, как минимум, 2/3 ширины зуба всегда находились в зацеплении с рейкой, и ограничивать радиальное перемещение шестерни из ее нормального положения зацепления в пределах не более 1/3 глубины зуба.
Контроль - визуальный осмотр.
4.5.5.4 Визуальный осмотр шестерен
Проведение визуального осмотра шестерен должно быть возможно без снятия шестерен или полного демонтажа металлоконструкции МПРП.
Контроль - визуальный осмотр.
4.5.5.5 Защита зубчато-реечного привода
Зубчато-реечный привод механизма подъемника должен быть защищен от попадания на приводную шестерню посторонних предметов.
Контроль - проверка конструкции и визуальный осмотр.
4.6 Требования к рабочей платформе
4.6.1 Уровень пола рабочей платформы
4.6.1.1 Регулирование уровня пола
Уровень пола рабочей платформы не должен отклоняться от горизонтальной плоскости базового шасси или опорно-поворотного устройства более чем на 5° при любых перемещениях подъемного оборудования или из-за действия нагрузок и сил, возникающих во время работы.
Системы ориентации пола платформы в горизонтальном положении должны включать в себя устройство безопасности согласно 4.11, которое в случае возникновения отказа в системе сохраняет уровень пола в пределах 5°.
Механическая система соответствует этому требованию, если тяги и рычаги, из которых она состоит, спроектированы для восприятия нагрузки, по меньшей мере вдвое большей, чем приходящаяся на них нагрузка.
Гидравлические цилиндры в гидравлической системе ориентации пола платформы должны соответствовать требованиям 4.10.2.
Контроль - проверка конструкции и функциональные испытания.
4.6.1.2 Регулировка уровня платформы
Ручная регулировка угла наклона платформы разрешается во всех положениях рабочей платформы. При рабочем положении МПРП скорость изменения угла наклона платформы не должна превышать максимальную допустимую при опускании или подъеме платформы при эксплуатации.
4.6.2 Материалы рабочей платформы
Рабочая платформа должна быть сделана из негорючих материалов, т.е. материалов, которые не поддерживают пламя после удаления источника воспламенения.
4.6.3 Системы защитных ограждений
Каждая рабочая платформа должна иметь защитные ограждения для предотвращения падения людей, материалов, инструмента и оборудования.
Защитное ограждение должно быть надежно закреплено на рабочей платформе и состоять из следующих частей:
- поручни высотой не менее 1,1 м;
- нижняя непрерывная обшивка высотой не менее 0,15 м;
- промежуточные элементы ограждения на расстоянии не более 0,55 м как от поручней, так и от непрерывной обшивки.
В местах для доступа на рабочую платформу высота непрерывной обшивки может быть уменьшена до 0,1 м.
Верхняя поверхность перил должна быть удобной для обхвата рукой и облицована малотеплопроводным материалом.
МПРП, которые эксплуатируются в странах, где относящиеся к ним нормативные документы позволяют снижение высоты поручней (национальные особенности роста людей), допускают применение поручней высотой 0,9 м.
Складные поручни удовлетворяют это требование при условии, что они остаются надежно прикрепленными к рабочей платформе и оснащены стопорными штифтами, защищенными от случайного разъединения и потери, или в равной степени эффективным средством блокировки.
4.6.4 Скобы для крепления устройств предохранения от падения
Стреловые подъемники должны быть оборудованы скобами для крепления устройств предохранения от падения. Подъемники мачтового типа также могут быть оснащены данным оборудованием.
Каждая скоба, используемая как часть системы предотвращения от падения, должна выдерживать статическую нагрузку 16 кН. Для скоб, рассчитанных для более чем одного работника, требуемая прочность должна быть увеличена на 20% для каждого дополнительного работника. Это требование прочности должно применяться только к скобе и креплению ее к МПРП во всех возможных направлениях нагрузки.
Число скоб рекомендуется устанавливать по допускаемому числу работников на платформе. Допускается подсоединение к одной скобе более чем одного работника, если она на это рассчитана.
Ответственная организация должна проверять скобы, используемые как часть системы предотвращения от падения в соответствии с требованиями 5.1.4.2.
Скобы должны быть сконструированы таким образом, чтобы можно было применять средства индивидуальной защиты. Острые кромки или углы должны быть закруглены радиусом не меньше 0,5 мм или на них должны быть сняты фаски под углом 45°.
Контроль - функциональное испытание или визуальный осмотр.
4.6.5 Проемы в ограждениях для входа и выхода
4.6.5.1 Общие положения
Проем для входа на рабочую платформу должен быть защищен съемным ограждением или запирающейся дверью. Ширина входа на рабочую платформу должна быть не менее 0,5 м.
Любая часть защитного ограждения, которая имеет возможность перемещаться в целях обеспечения доступа на рабочую платформу, не должна складываться или открываться наружу. Она должна быть сконструирована таким образом: возвращаться в закрытое положение либо блокироваться согласно 4.11 для предотвращения работы МПРП, пока эта часть не будет закрыта и закреплена. Самопроизвольное открывание должно быть предотвращено. Вспомогательные ограждения скользящего типа или прикрепленные на вертикальных петлях, которые автоматически возвращаются в защитное положение, не требуют запирания или блокировки.
По возможности проход следует делать не меньше 920 мм по высоте и 645 мм по ширине.
Контроль - проверка конструкции, визуальный осмотр и измерение.
4.6.5.2 Рабочие платформы специального назначения
Рабочие платформы специального назначения с площадью пола 0,5 м или менее, рассчитанные на одного работника, могут быть оснащены дверью, открывающейся наружу при условии, что они имеют самозакрывающийся верхний поручень в соответствии с 4.6.3.
Контроль - визуальный осмотр.
4.6.6 Пол рабочей платформы
Ширина пола рабочей платформы должна быть не менее 0,6 м, а диаметр пола круглой рабочей платформы - не менее 0,8 м. Минимальная площадь пола на одного человека должна составлять 0,5 м.
Пол рабочей платформы, включая любые люки, должен быть нескользким и самодренирующимся. Любое отверстие в полу или между полом и нижним ограждением или дверями для доступа должно иметь размеры не более 15 мм.
Контроль - проверка конструкции, визуальный осмотр и измерение.
Пол рабочей платформы и любой люк должны быть способными принимать номинальную нагрузку, распределенную в соответствии с 4.2.2.2.2.
Контроль - проверка конструкции.
4.6.7 Цепи или канаты
Использование цепей или канатов в качестве защитных ограждений или дверей в проемах для доступа не допускается.
Контроль - визуальный осмотр.
4.6.8 Лестница доступа
Высота от поверхности земли или с посадочной площадки до входа на рабочую платформу и на поворотную платформу подъемника должна быть не более 0,4 м.
Когда расстояние между уровнем поверхности, с которой осуществляется доступ, и уровнем пола рабочей платформы превышает 0,4 м, МПРП должен быть оборудован лестницей для доступа. Ступеньки или перекладины должны располагаться друг от друга на расстоянии не более 0,3 м и должны быть расположены равномерно на всем промежутке между нижней ступенькой/перекладиной и полом рабочей платформы. Нижняя ступенька/перекладина должна находиться не более чем на 0,4 м выше уровня поверхности, с которой осуществляется доступ. Каждая ступенька и перекладина должны быть шириной не менее 0,3 м, глубиной не менее 25 мм и нескользкими.
Передняя плоскость ступенек или перекладин должна располагаться по горизонтали на расстоянии не менее 0,15 м от опорной конструкции или любого другого элемента МПРП. Лестница для доступа должна располагаться симметрично двери для доступа.
Контроль - проверка конструкции, визуальный осмотр и измерение.
4.6.9 Захваты рукой и поручни
При подъеме или спуске по лестнице для доступа на рабочую платформу для обеих рук должны быть предусмотрены поручни, перила или подобные им соответствующие устройства. Они должны быть расположены таким образом, чтобы избежать использования органов управления и трубопроводов в качестве поручней или ступеней.
Контроль - проверка конструкции, визуальный осмотр и измерение.
4.6.10 Люки
Люки в рабочей платформе должны быть надежно заперты по отношению к рабочей платформе так, чтобы исключить их самопроизвольное открывание. Не допускается открывание люков вниз или в сторону.
Контроль - проверка конструкции и визуальный осмотр.
4.6.11 Защита рук при управлении
Руки машиниста, управляющего органами управления, должны быть защищены от механических и электрических опасностей.
Контроль - визуальный осмотр.
4.6.12 Звуковое устройство предупредительной сигнализации
МПРП типа 3 должно быть оборудовано звуковым устройством предупредительной сигнализации (например, гудком), приводимым в действие с рабочей платформы.
Контроль - функциональное испытание.
4.6.13 Средства связи
МПРП типа 2 и имеющие высоту подъема более 22 м должны быть оборудованы средствами связи (например, переносной рацией, видеосистемой) между людьми в рабочей платформе и водителем.
Контроль - визуальный осмотр и функциональное испытание.
4.6.14 Механические упоры
Перемещения рабочей платформы (платформ) относительно подъемного оборудования должны ограничиваться механическими упорами, которыми могут быть гидравлические цилиндры, предназначенные для выполнения этой функции.
Контроль - проверка конструкции и функциональное испытание.
4.6.15 Фиксация в транспортном положении
Рабочая платформа в транспортном положении должна фиксироваться таким образом, чтобы избежать опасных вибраций при транспортировании (см. 4.2.4.2.3).
Контроль - проверка конструкции и визуальный осмотр.
4.6.16 Изолированные рабочие платформы
Изолированные рабочие платформы должны изготавливаться из диэлектрических материалов, и могут иметь дренажные отверстия для слива воды и/или проемы для доступа. Рабочая платформа должна быть изготовлена из не поддерживающих горение материалов.
Конструкция и установка изолированных рабочих платформ и пультов управления в них, предназначенных для обслуживания электрических сетей под напряжением до 1000 В, должны обеспечить гальваническую развязку изоляции между металлоконструкцией подъемника и рабочей платформой не менее 0,5 МОм.
Примечание - Подробнее для рабочих платформ, сконструированных из непроводящих (изоляционных) материалов, см. [3]
Контроль - проверка конструкции, визуальный осмотр и испытание.
4.6.17 Снижение уровня шума
МПРП по уровню внешнего шума должны удовлетворять требованиям ГОСТ 12.1.003.
4.7 Требования к органам управления
4.7.1 Включение и управление
МПРП должны быть оборудованы таким управлением, чтобы все движения МПРП могли осуществляться только при воздействии на органы управления.
Направление движения рукояток должно соответствовать направлению движения рабочей платформы. Рукоятки и кнопки должны иметь устройства для самовозврата в нулевое положение, чтобы во включенном положении они удерживались только при непрерывном нажатии на рукоятку управления (кнопку).
Для органов управления передвижением, расположенных в кабинах МПРП, установленных на транспортных средствах, данное требование не является обязательным.
Все органы управления должны быть спроектированы с условием предотвращения самопроизвольного срабатывания.
Ножные органы управления должны иметь нескользкие поверхности и легко очищаться.
Органы управления должны быть расположены таким образом, чтобы машинист не подвергался опасности со стороны подвижных частей МПРП и имел хороший обзор.
МПРП с высотой подъема рабочей платформы более 12 м должны быть оборудованы двумя пультами управления, расположенными один в рабочей платформе, другой внизу, в удобном для управления и обзора месте, или иметь дистанционное управление (выносной пульт). Для МПРП с двумя пультами управления должна быть предусмотрена блокировка, исключающая возможность одновременного управления с двух пультов.
Контроль - проверка конструкции и функциональное испытание.
4.7.2 Направление перемещений
Направление всех перемещений МПРП должно быть точно указано на органах управления или около них с помощью слов или символов в соответствии с требованиями ГОСТ 32681** и ГОСТ 12.4.026**.
Контроль - визуальный осмотр.
4.7.3 Расположение, доступность, защита и выбор дублирующих органов управления
Органы управления должны быть расположены на рабочей платформе. Дублирующие органы управления для всех движений, осуществляемых за счет подвода энергии, за исключением передвижения и рулевого управления, должны быть предусмотрены на уровне основания или земли и не должны иметь приоритет в управлении над устройствами управления, расположенными на рабочей платформе.
Устройства управления должны быть легкодоступными.
Нормальное положение и ориентация тех пультов управления, которые не закреплены постоянно, должны быть четко обозначены.
Все устройства управления при прекращении воздействия на них должны автоматически возвращаться в нейтральное или выключенное положение.
Требование предотвращения самопроизвольного срабатывания по 4.7.1 применяется ко всем дублирующим органам управления.
Если перемещением можно управлять из дополнительных постов управления, то должен быть предусмотрен такой блокирующий механизм, что перемещение становится возможным только из одного предварительно выбранного поста управления. Средства управления на базовом или приземном уровне должны преобладать над всеми дополнительными средствами управления, включая управление аварийным остановом рабочей платформы.
Если используются беспроводные системы управления, то они должны соответствовать требованиям приложения G. Работа рабочего оборудования и функции привода подъема должны быть возможными только в случае, если устройства беспроводного управления размещаются на рабочей платформе в позиции, специально предназначенной производителем.
Все устройства управления должны быть защищены от несанкционированного включения, кроме включения, осуществляемого машинистом.
Контроль - визуальный осмотр и функциональное испытание.
4.7.4 Аварийные выключатели
МПРП должны быть оборудованы органами управления для аварийной остановки на каждой позиции управления.
Органы управления для аварийной остановки не требуются на МПРП с полнопоточными управляющими клапанами, рукоятки управления которыми соединены механически с золотниками управляющих клапанов (дополнительное ручное управление автоматически управляемой системой).
Контроль - визуальный осмотр и функциональное испытание.
4.7.5 Электрические выключатели
Электрические выключатели, отвечающие за безопасное функционирование, должны соответствовать 4.11.3.1.
Контроль - проверка конструкции.
4.7.6 Клапан управления и электромагнитный клапан
Клапан управления, в том числе клапан с электромагнитным управлением, должен быть спроектирован и установлен таким образом, чтобы он останавливал соответствующее движение в случае отключения энергии.
Контроль - проверка конструкции и функциональное испытание.
4.7.7 Возобновление подачи энергии после ее отключения
При включении или возобновлении подачи энергии после ее отключения не должно происходить никаких движений до тех пор, пока машинист не включит рабочее движение.
Контроль - проверка конструкции и функциональное испытание.
4.7.8 Дополнительная аварийная система
МПРП должны быть оборудованы дополнительной аварийной системой (например, ручным насосом, вспомогательным силовым агрегатом, гравитационными клапанами для опускания) в легко доступном месте, для того чтобы в случае выхода основного источника энергии из строя рабочая платформа могла быть возвращена в положение, из которого возможно безопасно покинуть ее.
Средства управления аварийной системы должны быть легкодоступными с земли (см. 4.7.3). В этом нет необходимости, если МПРП оборудован для безопасного доступа на рабочую платформу (или выхода с нее) другими средствами (например, закрепленными лестницами).
Контроль - проверка конструкции и функциональное испытание.
4.7.9 Ограничение скорости
В конструкции МПРП должно быть предусмотрено устройство ограничения скорости, чтобы даже в аварийной ситуации скорость перемещения рабочей платформы не превышала скорости, установленной эксплуатационной документацией более чем в 1,4 раза.
Контроль - проверка конструкции, функциональное испытание и визуальный осмотр.
4.7.10 Автоматическое или программируемое управление
Автоматическое или программируемое управление с помощью джойстика, рычага или переключателя разрешается, если используются соответствующие меры безопасности.
4.7.11 Органы управления лебедкой на автомобильном МПРП
Автомобильный МПРП, оснащенный лебедкой, должен иметь верхние и нижние органы управления лебедкой. Нижние органы управления должны быть расположены в непосредственной близости от нижнего поста управления.
На автомобильном МПРП с непроводящими (изолирующими) компонентами нижние органы управления лебедкой должны быть расположены таким образом, чтобы машинист не находился на токопроводящих частях МПРП между рабочей платформой и землей.
4.8 Требования к электрооборудованию
4.8.1 Общие требования
Электрическое оборудование МПРП должно соответствовать требованиям нормативных документов, а также [10] и [11].
Если МПРП предназначаются для эксплуатации вне диапазонов действия нижеуказанных пунктов [10]:
- подача постоянного тока;
- температура окружающего воздуха;
- высота;
- соединение с движущимися частями машины,
необходимо обосновать и изложить все отклонения от действующих стандартов и эксплуатационные ограничения в руководстве по эксплуатации и/или инструкциях эксплуатационных специальных (см. 6.2 и приложение F).
Напряжение электрического питания МПРП должно быть не более 400 В переменного тока и 220 В постоянного тока.
МПРП могут получать электрическиое питание от стационарных или передвижных источников электроэнергии с глухозаземленной или изолированной нейтралью с соблюдением соответствующих требований по электромагнитной совместимости.
Контроль - проверка конструкции и визуальный осмотр.
4.8.2 Главный выключатель
Главный выключатель должен быть установлен в легкодоступном месте. Должна быть предусмотрена возможность его запирания в выключенном положении для предотвращения несанкционированного включения.
Контроль - проверка конструкции и визуальный осмотр.
4.8.3 Кабели и провода
Кабели и провода должны быть многожильными для обеспечения гибкости и, при необходимости, маслостойкими.
Сечение жил проводов и кабелей цепей управления должно быть не менее 1,5 мм.
Для цепей управления напряжение должно быть не выше 42 В. В них разрешается применение проводов и кабелей с медными многопроволочными жилами сечением не менее 0,5 мм, если присоединение жил выполнено пайкой и провода не несут механическую нагрузку.
Эти требования не распространяются на кабели и провода, применяемые в приборах и устройствах безопасности.
В местах, где изоляция и оболочка проводов и кабелей могут подвергаться воздействию масла, допускается применение немаслостойких проводов и кабелей при условии их прокладки в трубах с герметичными вводами их в аппараты.
В местах возможных механических повреждений проводки необходимо предусмотреть ее защиту.
Все провода и кабели должны иметь маркировку.
Контроль - проверка конструкции и визуальный осмотр.
4.8.4 Защита аккумуляторной батареи
Аккумуляторные батареи должны быть защищены от короткого замыкания и механического воздействия.
Когда аккумуляторные батареи являются основным источником энергии, отсоединение (изолирование) батареи, т.е. прекращение подачи электрической энергии (например, при зарядке), должно осуществляться без использования инструмента.
Контроль - проверка конструкции и визуальный осмотр.
4.8.5 Защита от влаги
Корпуса приборов должны иметь соответствующую степень защиты от влаги согласно ГОСТ 14254. Производитель должен учитывать любые прогнозируемые условия использования (например, пар вместо воды), обеспечивая более высокую степень защиты.
Контроль - проверка конструкции и визуальный осмотр.
4.8.6 Электромагнитная совместимость (ЭMC)
Электрооборудование должно удовлетворять требованиям ЭMC.
4.8.7 Защита рабочего персонала от поражения электрическим током
В МПРП, имеющих напряжение свыше 42 В переменного тока и 110 В постоянного тока, для защиты рабочего персонала от поражения электрическим током при повреждении изоляции необходимо выполнить заземление или зануление электрооборудования.
Корпус выносного пульта должен быть выполнен из изоляционного материала или заземлен (занулен) не менее чем двумя проводниками.
Защитное заземление электроприемников МПРП допускается не выполнять, если электроприемники имеют надежный контакт с заземленной или зануленной металлоконструкцией подъемника.
Контроль - проверка конструкции и визуальный осмотр.
4.9 Требования к гидравлической системе, гидравлическому оборудованию и трубопроводам
4.9.1 Общие требования
Гидравлическая система должна соответствовать требованиям настоящего стандарта.
Особое внимание должно уделяться надежности тех устройств, которые могут вызвать аварийную ситуацию при выходе из строя или аварийном режиме функционирования.
Все устройства системы должны выдерживать механические воздействия в виде вибраций, линейных ускорений и ударов, возникающих при работе МПРП.
Гидравлическая система и комплектующее ее гидравлическое оборудование (гидрораспределители, предохранительные клапаны, гидроаккумуляторы, гидравлические цилиндры, гидравлические моторы и насосы), а также рабочая жидкость, трубы и рукава должны иметь документы, подтверждающие их технические характеристики и качество.
Конструкция гидравлической системы должна исключать возможность:
- повреждения гидравлического оборудования;
- повреждения трубопроводов, рукавов высокого давления и элементов их соединения.
Контроль - проверка конструкции и визуальный осмотр.
4.9.2 Устройство ограничения давления
Каждый гидравлический контур гидравлической системы должен включать в себя устройство ограничения давления (например, предохранительный клапан) перед первым управляющим распределителем.
Рабочая жидкость через предохранительный клапан должна сливаться в гидробак.
Не допускается установка запорной арматуры между насосом и предохранительным клапаном.
Отрегулированные предохранительные клапаны должны быть опломбированы специалистом, ответственным за безопасную эксплуатацию подъемников.
Контроль - проверка конструкции и визуальный осмотр.
4.9.3 Прочность трубопроводов и соединений
Трубопроводы и их соединения, которые могут подвергаться воздействию максимального давления, должны быть спроектированы по меньшей мере на вдвое большее рабочее давление без предпосылок возникновения остаточной деформации ![]() см. 4.10.1.3 для аварийных условий.
см. 4.10.1.3 для аварийных условий.
Контроль - проверка конструкции.
4.9.4 Сопротивление шлангов разрыву под действием внутреннего давления
Все фитинги и шланги, которые постоянно удерживают нагрузку и поддерживают или стабилизируют рабочую платформу, как критические компоненты должны иметь сопротивление разрыву под действием внутреннего давления в четыре раза больше рабочего давления, на которое проектируется система.
Шланги и фитинги, не являющиеся критическими компонентами, должны иметь сопротивление разрыву под действием внутреннего давления в три раза больше рабочего давления, на которое проектируется система.
Контроль - проверка конструкции.
4.9.5 Номинальное значение давления других компонентов
Все компоненты гидравлической системы, иные, чем заданные 4.9.3, 4.9.4 и 4.10, должны быть рассчитаны, по меньшей мере, на номинальное максимальное давление, под которым они будут работать, включая временное увеличение в регулировании давления, необходимое для проведения испытания на перегрузку (см. 5.1.4.4).
Контроль - проверка конструкции.
4.9.6 Присоединение измерительных устройств
В каждом гидравлическом контуре гидравлической системы должны быть предусмотрены места для установки контролирующих давление приборов и отвода воздуха, попавшего в систему, и установлено необходимое число измерительных устройств для проверки и контроля правильности работы системы.
Используемые измерительные устройства должны соответствовать требованиям настоящего стандарта:
- быть защищены от инерционных нагрузок, гидравлических ударов, вибраций и механических воздействий;
- соответствовать схемам соединений и измерений;
- быть правильно смонтированы;
- соответствовать диапазону измеряемых давлений.
Контроль - проверка конструкции и визуальный осмотр.
4.9.7 Выпуск воздуха
В каждом гидравлическом контуре гидравлической системы должны быть предусмотрены места для отвода воздуха, попавшего в систему.
Контроль - проверка конструкции и визуальный осмотр.
4.9.8 Впускной фильтр
Каждый резервуар для рабочей жидкости, открытый в атмосферу, должен быть оборудован впускным воздушным фильтром.
Контроль - визуальный осмотр.
4.9.9 Указатели уровня рабочей жидкости
Каждый бак для рабочей жидкости должен быть оборудован указателем уровня масла, на котором должны быть указаны максимальный и минимальный уровни жидкости в баке.
Уровень рабочей жидкости должен контролироваться, в зависимости от конструкции МПРП, с помощью масломерного стекла или масломерных щупов, когда визуальный контроль за уровнем жидкости затруднен по конструктивным условиям или условиям безопасности. Контроль уровня жидкости должен проводиться в транспортном положении МПРП.
При использовании на МПРП нескольких баков они должны иметь разную маркировку.
Контроль - проверка конструкции и функциональное испытание.
4.9.10 Чистота рабочей жидкости
Каждая гидравлическая система должна иметь средства для обеспечения уровня чистоты рабочей жидкости, необходимого для безопасной работы этой системы и ее элементов.
Фильтрование рабочей жидкости должно быть непрерывным, кроме случаев срабатывания предохранительного клапана.
Фильтр, установленный на линии слива, должен иметь перепускной клапан, отрегулированный на давление открывания не более 0,4 МПа.
Конструкция гидросистемы должна быть обеспечена устройством, позволяющим контролировать загрязненность фильтра.
Контроль - проверка конструкции.
4.9.11 Газогидравлические аккумуляторы
В гидравлических системах, включающих в себя газогидравлические аккумуляторы, должны быть предусмотрены устройства для автоматического сброса давления жидкости или принудительной изоляции аккумулятора, когда выключается гидропривод и в системе сбрасывается давление. На табличке или поверхности аккумулятора краской должны быть нанесены дополнительные указания, например: "Внимание! Сосуд под давлением. Сброс давления перед началом демонтажа!".
Если требуется сохранение давления в газогидравлическом аккумуляторе при отключении системы, на аккумуляторе или вблизи него на видном месте должна быть установлена табличка с полной информацией по безопасному обслуживанию.
Дублирующая информация должна быть представлена в руководстве по эксплуатации и/или в инструкциях эксплуатационных специальных и соответствовать требованиям ГОСТ 12.2.086, а также см. 6.2 и приложение F.
Контроль - проверка конструкции и визуальный осмотр.
4.10 Гидравлические цилиндры
4.10.1 Проектирование гидроцилиндров
4.10.1.1 Общие положения
Конструкция гидроцилиндров, воспринимающих нагрузку, должна основываться на анализе давлений, нагрузок, сил и перемещений в планируемых условиях работы и условиях перегрузки и неполадок (см. 4.10.1.3). Цилиндры, выполняющие роль механических упоров, должны быть спроектированы таким образом, чтобы они выдерживали двойную нагрузку.
В условиях выхода из строя гидроцилиндров рассчитанное максимальное напряжение в любом его элементе не должно превышать предела текучести материала.
Контроль - проверка конструкции.
4.10.1.2 Нормальные рабочие условия
4.10.1.2.1 Продольный изгиб
Ответственная организация должна учитывать рабочие условия, которые вызывают комбинации удлинения, давления, упругих деформаций и внешних приложенных нагрузок и сил, создающих условия для максимального продольного изгиба.
4.10.1.2.2 Конструктивные элементы гидроцилиндров
Конструкция сварных соединений должна соответствовать 4.2.4.2.
Воспринимающие нагрузку резьбовые соединения должны отвечать требованиям соответствующих стандартов, а при проведении расчетов напряжений следует учитывать уменьшенные площади среза из-за допусков при изготовлении и упругой деформации, вызываемой гидравлическим давлением.
Конструкция резьбовых соединений, подверженных воздействию переменных растягивающих нагрузок, должна учитывать усталость металла и предотвращать самопроизвольное рассоединение (откручивание).
Контроль - проверка конструкции и визуальный осмотр.
4.10.1.2.3 Условия, вызывающие повышение давления в гидравлической системе (см. рисунки 5-9)
Условиями повышения давления в гидравлической системе, принимаемыми во внимание при расчетах, следует считать:
a) воздействие устройств, которые уменьшают скорость выдвижения/втягивания штоков гидроцилиндров до скорости, которая могла бы быть в результате подачи полного потока рабочей жидкости в цилиндры, вызывающей внутреннюю нагрузку от воздействия давления в дополнение к нормальному давлению, возникающему вследствие приложения внешних нагрузок.
Это изменение давления может быть определено как отношение
![]() ,
,
где D - диаметр поршня;
d - диаметр штока поршня.
Диаметр штока поршня учитывают в расчете, когда цилиндр работает на растяжение и устройство управления скоростью воздействует на шестерню с внутренним зацеплением;
b) воздействие температурного расширения рабочей жидкости, заключенной в "запертом" цилиндре, находящемся в нерабочем состоянии;
c) перетечки рабочей жидкости через уплотнения поршня в цилиндрах двойного действия;
d) блокирование (заклинивание) одного из цилиндров в системе, где один и тот же механизм приводится в движение более чем одним цилиндром. При работе цилиндров двойного действия это включает в себя силу (силы), вызываемую(ые) другим цилиндром (цилиндрами), или силу, требующуюся для перемещения другого цилиндра.
Примечание - Устройство управления скоростью может иметь вид управляющего клапана, который может быть частично открытым или закрытым.
|

D - диаметр поршня; d - диаметр штока поршня с цилиндром на растяжение, а блок регулирования скорости действует на кольцевой зазор; F - нагрузка; P - давление в системе; ![]() - нормальное давление; Z - ограниченный расход;
- нормальное давление; Z - ограниченный расход;
a)  ; b)
; b) 
Расчетные случаи: 1 - при воздействии внешнего усилия F; 2 - при воздействии давления p; 1+2 - совместное воздействие внешнего усилия F и давления p.
Рисунок 5 - Давления в цилиндрах при нормальном режиме работы - Цилиндр работает на сжатие
|

D - диаметр поршня; d - диаметр штока поршня с цилиндром на растяжение, а блок регулирования скорости действует на кольцевой зазор; F - нагрузка; P - давление в системе; ![]() - нормальное давление; Z - ограниченный расход;
- нормальное давление; Z - ограниченный расход;
a)  ; b)
; b) 
Расчетные случаи: 3 - при воздействии внешнего усилия F; 4 - при воздействии давления p; 3+4 - совместное воздействие внешнего усилия F и давления p
Рисунок 6 - Давления в цилиндрах при нормальном режиме работы - Цилиндр работает на растяжение
Снизу и сверху поршня - равное давление. Нагрузка воспринимается площадью штока, ![]() , вместо площади поршня
, вместо площади поршня ![]() . Нормальное давлениe
. Нормальное давлениe ![]() возрастает прямо пропорционально отношению
возрастает прямо пропорционально отношению ![]() .
.
|

D - диаметр поршня; d - диаметр штока поршня с цилиндром на растяжение и блоком регулирования скорости, действующим на кольцевой зазор; F - нагрузка; 1 - поврежденное уплотнение
Рисунок 7 - Давление цилиндра при поврежденном уплотнении
|

D - диаметр поршня; d - диаметр штока поршня с цилиндром на растяжение и блоком регулирования скорости, действующим на кольцевой зазор; F - нагрузка; P - давление системы; ![]() - нормальное давление; Z - ограниченный расход;
- нормальное давление; Z - ограниченный расход;
a) 
Рисунок 8 - Сдвоенные цилиндры, работающие на сжатие, при нормальном режиме работы
|

D - диаметр поршня; d - диаметр штока поршня с цилиндром на растяжение и блоком регулирования скорости, действующим на кольцевой зазор; ![]() - нагрузка продольного изгиба; F - нагрузка; P - давление системы;
- нагрузка продольного изгиба; F - нагрузка; P - давление системы; ![]() - нормальное давление под действием нагрузки; Z - ограниченный расход; Y - заблокированная линия;
- нормальное давление под действием нагрузки; Z - ограниченный расход; Y - заблокированная линия;
a)  ; b)
; b)  ; c)
; c) 
Рисунок 9 - Сдвоенные цилиндры, работающие на сжатие, когда одна магистраль заблокирована
4.10.1.3 Причины выхода из строя гидроцилиндров
4.10.1.3.1 Утечка рабочей жидкости через уплотнения
В гидроцилиндрах двойного действия, работающих на сжатие, давление, развиваемое в нормальных условиях, может повыситься прямо пропорционально отношению ![]() из-за утечки рабочей жидкости через уплотнения поршня. Давление оказывает воздействие, особенно на напряжение в корпусе и головке цилиндра, которое не должно превышать предела текучести материала
из-за утечки рабочей жидкости через уплотнения поршня. Давление оказывает воздействие, особенно на напряжение в корпусе и головке цилиндра, которое не должно превышать предела текучести материала ![]() .
.
Отношение ![]() является минимальным коэффициентом безопасности для клапанов, шлангов и трубопроводов, которые подвергаются воздействию того же давления, что и гидроцилиндр, если повышение давления не ограничивается другими гидравлическими устройствами.
является минимальным коэффициентом безопасности для клапанов, шлангов и трубопроводов, которые подвергаются воздействию того же давления, что и гидроцилиндр, если повышение давления не ограничивается другими гидравлическими устройствами.
4.10.1.3.2 Приведение в движение одного и того же механизма несколькими гидроцилиндрами
Когда один и тот же механизм приводится в движение более чем одним гидроцилиндром, как показано на рисунках 8 и 9, следует учитывать, что вследствие блокирования одного цилиндра другой получает более высокие нагрузки.
В условиях выхода из строя гидроцилиндра рассчитанное максимальное напряжение не должно превышать предела текучести материала ![]() .
.
4.10.2 Предотвращение самопроизвольного перемещения гидроцилиндров, воспринимающих нагрузку
Гидроцилиндры, воспринимающие нагрузку, должны быть оборудованы устройством для предотвращения самопроизвольного перемещения частей цилиндра относительно друг друга, вызванного выходом из строя наружного трубопровода (исключая трубопроводы, указанные в перечислении с).
Должно быть учтено влияние теплового расширения в цилиндрах, воспринимающих нагрузку.
Если в качестве устройства используются запорные клапаны, они должны закрываться автоматически для предотвращения утечки рабочей жидкости из цилиндров до тех пор, пока они не откроются принудительно.
Запорные клапаны должны быть:
a) изготовлены как одно целое с цилиндром, или
b) непосредственно и жестко монтироваться на фланце, или
c) расположены рядом с гидроцилиндром и соединены с ним с помощью коротких жестких трубопроводов, имеющих сварные или фланцевые соединения.
Другие типы фитингов, например прессуемая арматура или трубные фитинги с развальцовкой, не разрешаются между цилиндром и стопорным клапаном.
Примечание - Эти требования учитываются также в 4.5.1.6.
4.10.3 Проверка
Контроль требований 4.10 - проверка конструкции и визуальный осмотр.
4.11 Требования к устройствам (приборам) безопасности
4.11.1 Общие положения
Устройства безопасности должны в случае возникновения опасных ситуаций полностью прекращать соответствующие движения элементов подъемника в опасном направлении, если не установлен другой порядок действий.
Для безопасного производства работ МПРП должны быть оборудованы следующими устройствами безопасности:
- системой, чувствительной к нагрузке (например, ограничителем предельного груза);
- системой, чувствительной к положению подъемного оборудования, ограничивающей превышение допускаемых напряжений;
- системой, чувствительной к опрокидывающему моменту, ограничивающей зону обслуживания;
- устройством ориентации пола рабочей платформы в горизонтальном положении;
- устройством блокировки подъема и поворота подъемного оборудования при не установленном на опорах подъемнике, кроме винтовых опор, устанавливаемых вручную;
- устройством блокировки подъема опор при поднятом рабочем оборудовании, кроме винтовых опор, устанавливаемых вручную;
- устройством аварийного опускания рабочей платформы при отказе основных систем привода;
- устройством, предохраняющим выносные опоры от самопроизвольного выдвижения (поворота) при работе подъемника;
- устройством (указателем) угла наклона подъемника;
- системой аварийной остановки привода перемещения при управлении из рабочей платформы и с нижнего пульта, которая должна быть оснащена кнопкой "Стоп";
- переговорным устройством и/или видеосистемой (для подъемников с высотой подъема рабочей платформы более 22 м);
- анемометром (для подъемников с высотой подъема рабочей платформы более 22 м).
Примечание - Устройства безопасности, как правило, состоят из следующих элементов:
- отслеживающих информацию о работе системы и предоставляющих информацию, например выключатели, клапаны и т.п.;
- передающих информацию, например кабели и провода, трубопроводы, тяги, рычаги и т.п.;
- воспринимающих информацию, например звуковой сигнал, контакты, реле, клапаны и т.п.
4.11.2 Размещение устройств безопасности
Устройства безопасности должны быть установлены в местах, где они будут защищены от повреждения, но легко доступны для проведения регулировки. Их регулировка должна быть возможна только с использованием инструмента. Для исключения несанкционированного вмешательства устройства безопасности, подлежащие регулировке, должны быть опломбированы.
Контроль - визуальный осмотр.
4.11.3 Электрические устройства безопасности
4.11.3.1 Системы аварийного выключения
Электрические устройства безопасности должны действовать в качестве элементов, предоставляющих информацию, и быть спроектированы таким образом, чтобы их отказ происходил в безопасном режиме. Если используются нормально замкнутые выключатели, они должны соответствовать требованиям [12].
Датчики или выключатели допускается использовать при следующих условиях:
- они могут быть дублированы;
- отдельные датчики или выключатели допускается использовать при условии постоянного наблюдения за правильностью их функционирования.
Контроль - проверка конструкции и функциональные испытания.
4.11.3.2 Повреждения в проводке
Проводка, используемая в качестве элемента, передающего сигнал, должна быть установлена и защищена таким образом, чтобы избежать повреждения из-за внешнего воздействия.
Контроль - проверка конструкции и визуальный осмотр.
4.11.3.3 Срок службы элементов
Элементы, воспринимающие информацию (например, контакты и реле), должны иметь срок службы, минимально вдвое превышающий число рабочих циклов, для которых предназначен МПРП (см. 4.2.4.2.3).
Контроль - проверка конструкции.
4.11.4 Гидравлические (пневматические) устройства безопасности
Гидравлические (пневматические) устройства безопасности и части этих устройств/систем, которые непосредственно действуют на полнопоточные клапаны гидравлических (пневматических) систем, должны быть дублированы, если отказ одного элемента может вызвать отказ всей системы. Управляющие клапаны со вспомогательным управлением в этих устройствах/системах должны быть спроектированы и установлены таким образом, чтобы отказ в работе в случае отключения энергии приводил к переходу в безопасное состояние (т.е. остановке соответствующего движения).
Это требование выполняется с помощью:
a) полнопоточного клапана, действующего непосредственно на соответствующий контур гидравлической (пневматической) системы, или
b) клапана с полностью механическим управлением, установленным в контуре пилотного управления управляющим клапаном, в соответствии с 4.7.6.
Контроль - проверка конструкции и функциональное испытание.
4.11.5 Механические устройства безопасности
Элементы механических устройств безопасности, такие как тяги, рычаги, канаты, цепи и т.д., должны быть спроектированы с учетом восприятия нагрузки вдвое большей, чем номинальная нагрузка, прикладываемая к ним (см. 4.5.2.1 и 4.5.3.1 для стальных канатов и цепей).
Контроль - проверка конструкции и функциональное испытание.
4.11.6 Блокирование устройств безопасности
При обычном режиме работы или аварийном опускании блокирование устройств безопасности должно быть запрещено, за исключением процедур безопасной блокировки согласно предписаниям предприятия-изготовителя. Блокирование устройств безопасности во время проведения испытаний, ремонта или технического обслуживания МПРП должно выполняться согласно рекомендациям и процедурам предприятия-изготовителя. Оборудование для блокировки устройств безопасности должно быть спроектировано с условием сведения к минимуму возможности возникновения опасных условий для обслуживающего персонала.
Контроль - проверка конструкции и функциональное испытание.
5 Проверки и испытания МПРП на соответствие требованиям безопасности
5.1 Проверки и испытания
5.1.1 Общие положения
Каждый МПРП должен соответствовать требованиям безопасности настоящего стандарта.
Проверки и испытания, гарантирующие, что МПРП соответствует настоящему стандарту (см. 5.2 и 5.3), должны включать в себя следующее:
a) проверку конструкции (см. 5.1.2),
b) производственный контроль (см. 5.1.3), и
c) испытания (см. 5.1.4).
Результаты проверок и испытаний, фамилии и адреса проводивших их лиц должны быть включены в подписанный акт (протокол) или отчет.
Диапазон проверок и испытаний для некоторых случаев - по 5.1.4, 5.3, 6.2.2 и приложению F.
5.1.2 Проверка конструкции
Проверка конструкции должна подтверждать, что МПРП спроектирован согласно требованиям настоящего стандарта, технического задания на проектирование образца и соответствует необходимому уровню безопасности.
Проверка должна состоять из экспертизы следующих документов:
a) чертежей, содержащих основные размеры МПРП и требования на изготовление узлов и деталей;
b) сборника эксплуатационных и ремонтных документов и инструкций, определенных производителем (заказчиком);
c) информации об использованных материалах;
d) электрических, гидравлических и пневматических схем;
e) технических условий (ТУ);
f) расчетов;
g) программ и методик испытаний.
В этих документах должна содержаться вся необходимая информация, обеспечивающая возможность проверки расчетов.
5.1.3 Производственный контроль
Производственный контроль должен подтвердить, что:
a) МПРП изготовлен согласно прошедшим проверку документам;
b) элементы МПРП соответствуют чертежам, а детали и узлы имеют соответствующие клейма и прошли приемку ОТК предприятия-изготовителя;
c) имеются сертификаты соответствия на материалы, примененные в МПРП, и/или акты испытаний на каждый тип канатов, цепей и гидравлических или пневматических шлангов;
d) качество сварных швов, особенно в компонентах, несущих нагрузку, гарантируется использованием соответствующих нормативных документов;
e) узлы и устройства безопасности соответствуют настоящему стандарту;
f) на МПРП имеются: табличка с данными изготовителя; маркировка рабочей платформы и съемных частей; информация о работе рычагов и кнопок пультов управления, электрической, гидравлической и/или пневматической схем; информация об аварийных системах.
5.1.4 Испытания
5.1.4.1 Общие положения
МПРП должен быть подвергнут испытаниям для подтверждения:
a) устойчивости,
b) исправности металлоконструкции и соответствия значений напряжений (под воздействием внешних сил) расчетным и/или допустимым;
c) правильности и безопасности выполнения всех функций;
d) нанесения маркировочных меток и наличия (согласно рабочей конструкции предприятия-изготовителя) поясняющих табличек.
Чтобы сделать возможным безопасное проведение испытаний МПРП без дублирующих органов управления согласно 4.7.3, могут потребоваться особые условия их проведения.
Серийная продукция должна проходить приемо-сдаточные и периодические испытания.
Образцы МПРП, прошедшие доработку или модернизацию, должны пройти типовые испытания.
5.1.4.2 Динамическое испытание скоб для крепления устройств предохранения от падения
МПРП, сконструированные для эксплуатации с устройством предохранения от падения (см. 4.6.4), должны успешно проходить следующие испытания:
a) МПРП, установленный на ровной поверхности, должен выдерживать силу, возникающую при свободном падении испытательного груза массой 136 кг, при этом:
- в исходном положении испытательный груз должен находиться на расстоянии 0,46 м от верхнего поручня рабочей платформы со стороны наименьшей устойчивости МПРП;
- испытательный груз подсоединяется канатом, не поглощающим рывок, в точке закрепления, ближайшей к месту ее исходного положения. При этом канат должен проходить над верхним поручнем рабочей платформы таким образом, чтобы опрокидывающая сила была приложена к поручню;
- расстояние по вертикали свободного падения испытательного груза должно быть не менее 1,2 м без помех или препятствий и удара об пол или землю;
b) МПРП должен быть испытан при положении, наиболее неблагоприятном с точки зрения устойчивости. Испытательный груз и груз на платформе в сумме должны быть равны номинальной грузоподъемности платформы. Испытание должно быть проведено без груза на платформе, если это является состоянием наименьшей устойчивости. Груз на платформе должен быть равномерно распределен;
c) МПРП не должен опрокидываться в процессе этого испытания. Допускается прогиб любой из частей МПРП, вызванный присоединенным к нему испытательным грузом.
См. рисунок 10.
|

1 - скоба (
см. 4.6.4);
2 - испытательный груз массой 136 кг; 3 - расстояние свободного падения; 4 - МПРП; 5 - ровная поверхность
Конфигурация стрелы, платформы и шасси должны соответствовать наиболее неблагоприятному сочетанию.
Рисунок 10 - Испытание скоб для крепления устройств предохранения от падения
5.1.4.3 Испытания на устойчивость
Испытания на устойчивость должны состоять из этапов статических и динамических испытаний.
5.1.4.3.1 Статические испытания
Статические испытания МПРП проводят с использованием груза, на 50% превышающего номинальный. При этом 10% дополнительного груза размещается в рабочей платформе, а 40% подвешивают к рабочей платформе на гибкой подвеске на высоте 100-200 мм от земли с последующей выдержкой под нагрузкой в течение 10 мин.
Для проведения статических испытаний МПРП должен быть установлен на поверхности с уклоном, равным максимально допустимому (по определению предприятия-изготовителя) плюс 0,5°. Если МПРП поддерживается в рабочем положении на пневматических шинах и не оснащен системой предупреждения машиниста о низком давлении в шинах, он должен быть установлен с наклоном, учитывающим спущенную шину.
Испытательные нагрузки должны быть приложены таким образом, чтобы создавались наиболее неблагоприятные сочетания нагрузок, оговоренных в 4.2.3.1-4.2.3.4.
Стабилизаторы, если они предусмотрены конструкцией, следует использовать согласно указаниям предприятия-изготовителя.
Для МПРП в группе A, которые имеют удлинение платформы с номинальной нагрузкой, отличающейся от номинальной нагрузки основной рабочей платформы, и которые не имеют специального контроля нагрузки удлинения платформы, номинальная нагрузка (см. 4.2.1.1) должна быть приложена в соответствии с рисунком 11.
Люди и нагрузки инструмента/материалов должны быть распределены на платформе удлинения и, если необходимо, на основной платформе, как определено в 4.2.2.2.2.
|

1 - основная рабочая платформа; 2 - платформа удлинения (полностью выдвинутое положение); 3 - номинальная нагрузка, m
Номинальная нагрузка выражается равенством (см. также 4.2.1):
![]() ,
,
где ![]() ;
;
![]() - разрешенное число людей на основной рабочей платформе;
- разрешенное число людей на основной рабочей платформе;
![]() - величина, равная 80 кг (масса человека);
- величина, равная 80 кг (масса человека);
![]() - масса инструмента и материалов, разрешенная для платформы удлинения.
- масса инструмента и материалов, разрешенная для платформы удлинения.
Рисунок 11 - Статическое испытание
Эти испытания допускается проводить на ровной поверхности, если испытательные нагрузки будут пересчитаны с учетом значения максимально допустимого уклона поверхности, определяемого предприятием-изготовителем, плюс 0,5°.
Испытательные нагрузки, при необходимости, могут быть приложены в любом месте при соблюдении условия, что они не приведут к перенапряжению любой части МПРП, к которой приложена нагрузка.
Испытание должно быть проведено во всех наиболее неблагоприятных рабочих и/или транспортных положениях.
МПРП является устойчивым, если он может находиться в неподвижном состоянии, воспринимая испытательную нагрузку (нагрузки), и не имеет остаточной деформации металлоконструкций.
Примеры показаны в таблице 1 и на рисунке 2.
Примечание - МПРП считается устойчивым, если он может восстанавливать устойчивое состояние без опрокидывания при воздействии испытательной нагрузки. Отрыв шин или аутригеров от площадки во время испытания на устойчивость не указывает на состояние неустойчивости.
Также должно быть подтверждено, что приложение сил в соответствии с 4.2.2.4 в любом месте на рабочей платформе не приводит к возникновению остаточных деформаций рабочей платформы.
5.1.4.3.2 Динамические испытания на МПРП типов 2 и 3
5.1.4.3.2.1 Общие положения
МПРП типов 2 и 3 должны подвергаться испытаниям на бордюрном камне и тормозным испытаниям с номинальной нагрузкой, распределенной равномерно по половине площади рабочей платформы с той стороны, где создается наибольший опрокидывающий момент.
Для МПРП типов 2 и 3 в группе A, которые имеют расширители рабочей платформы с номинальными нагрузками, отличающимися от номинальных нагрузок на основной рабочей платформе, и не оснащены ограничителем предельного груза, испытания должны быть проведены с нагрузками, равномерно распределенными как по основной, так и по удлиненной части платформы (см. рисунок 12).
|

1 - основная рабочая платформа; 2 - удлиненная часть платформы (полностью выдвинутая); 3 - номинальная нагрузка (на удлиненной части платформы), ![]() ; 4 - номинальная нагрузка (на основной платформе),
; 4 - номинальная нагрузка (на основной платформе), ![]()
Номинальная нагрузка ![]() определяется выражением (см. также 4.2.1)
определяется выражением (см. также 4.2.1)
![]() .
.
Номинальная нагрузка ![]() определяется выражением (см. также 4.2.1)
определяется выражением (см. также 4.2.1)
![]() ,
,
где ![]() ;
;
![]() ;
;
![]() - разрешенное число людей на основной рабочей платформе;
- разрешенное число людей на основной рабочей платформе;
![]() - разрешенное число людей или номинальное число рабочих на удлиненной части платформы;
- разрешенное число людей или номинальное число рабочих на удлиненной части платформы;
![]() - масса инструмента и материалов, допустимая на основной рабочей платформе;
- масса инструмента и материалов, допустимая на основной рабочей платформе;
![]() - масса инструмента и материалов, допустимая на удлиненной части платформы;
- масса инструмента и материалов, допустимая на удлиненной части платформы;
![]() - величина, равная 80 кг (масса человека)
- величина, равная 80 кг (масса человека)
Рисунок 12 - Динамические испытания на МПРП типов 2 и 3
Также должны быть проведены испытания при нагружении только расширителя рабочей платформы. При этом нагрузки на основной платформе, которые увеличивают опрокидывающие моменты, должны быть учтены согласно 4.2.3. Пример того, как надо учитывать эти нагрузки, приведен на рисунке 13.
|

1 - основная рабочая платформа; 2 - удлиненная часть платформы (полностью выдвинутая); 3 - номинальная нагрузка (удлиненная часть платформы), ![]() ; 4 - номинальная нагрузка (основная платформа),
; 4 - номинальная нагрузка (основная платформа), ![]() ; 5 - снятие стабилизирующей части нагрузки на основной рабочей платформе; 6 - линия опрокидывания
; 5 - снятие стабилизирующей части нагрузки на основной рабочей платформе; 6 - линия опрокидывания
Номинальная нагрузка ![]() определяется выражением (см. также 4.2.1)
определяется выражением (см. также 4.2.1)
![]() .
.
Номинальная нагрузка ![]() определяется выражением (см. также 4.2.1)
определяется выражением (см. также 4.2.1)
![]() ,
,
где ![]() ;
;
![]() ;
;
![]() - разрешенное число людей на основной рабочей платформе;
- разрешенное число людей на основной рабочей платформе;
![]() - разрешенное число людей или номинальное число рабочих на удлиненной части платформы;
- разрешенное число людей или номинальное число рабочих на удлиненной части платформы;
![]() - масса инструмента и материалов, допустимая на основной рабочей платформе;
- масса инструмента и материалов, допустимая на основной рабочей платформе;
![]() - масса инструмента и материалов, допустимая на удлиненной части платформы;
- масса инструмента и материалов, допустимая на удлиненной части платформы;
![]() - величина, равная 80 кг (масса человека);
- величина, равная 80 кг (масса человека);
![]() - часть нагрузки на основной рабочей платформе, находящаяся за пределом линии опрокидывания.
- часть нагрузки на основной рабочей платформе, находящаяся за пределом линии опрокидывания.
Примечание - ![]() вычисляется путем распределения людей и инструмента/материалов, как задано в 4.2.2.1, с последующим представлением части нагрузки за пределом линии опрокидывания с помощью коэффициента
вычисляется путем распределения людей и инструмента/материалов, как задано в 4.2.2.1, с последующим представлением части нагрузки за пределом линии опрокидывания с помощью коэффициента ![]() .
.
Рисунок 13 - Динамическое испытание МПРП типов 2 и 3 с местоположениями нагрузок
5.1.4.3.2.2 Испытания при наезде на бордюрный камень или углубление
Испытания на бордюрном камне должны быть выполнены как при движении вперед, так и при движении назад, в каждом из соответствующих положений МПРП и, если на разных высотах рабочей платформы движение может происходить с разными скоростями, испытания следует повторять для каждой из этих высот с максимально допустимой скоростью. Во всех случаях управляемые колеса должны быть установлены параллельно корпусу машины.
Во время проведения этих испытаний моделировать воздействие допустимой скорости ветра необязательно.
МПРП не должен опрокидываться во время наезда на бордюрный камень или углубление:
a) во всех случаях при испытаниях МПРП типов 2 и 3, за исключением МПРП, монтируемых на рельсовом ходу, они должны передвигаться по ровной поверхности таким образом, чтобы:
1) провести наезд на бордюрный камень высотой 0,1 м под углом 30° поочередно каждым из ведущих ходовых колес;
2) провести наезд на бордюрный камень одновременно обеими ведущими ходовыми колесами.
При этом должна поддерживаться максимальная скорость до тех пор, пока МПРП не остановится или оба ходовых колеса не заедут на бордюрный камень.
Кроме того:
b) при испытаниях МПРП типов 2 и 3, предназначенных для эксплуатации на невыровненных (не подготовленных специально) поверхностях, за исключением МПРП, монтируемых на рельсовом ходу, они должны передвигаться по ровной поверхности таким образом, чтобы:
1) поочередно наезжать под углом 30° на впадину глубиной 0,1 м каждым ведущим колесом и перемещаться до тех пор, пока колесо не съедет в эту впадину или не переедет ее;
2) оба ведущих колеса одновременно съехали в одну и ту же впадину или не переехали ее;
c) при испытаниях МПРП типов 2 и 3, предназначенных для использования только на мощенных (специально подготовленных) покрытиях, за исключением МПРП, монтируемых на рельсовом ходу, они должны передвигаться по ровной поверхности таким образом, чтобы поочередно съезжать под углом 90° ведущим колесом в квадратное углубление со стороной 600 мм и перепадом высот 100 мм. При каждом испытании в углубление должно съезжать лишь одно колесо.
При этом должна поддерживаться максимальная скорость до тех пор, пока МПРП не остановится или колесо не переедет углубление.
5.1.4.3.2.3 Испытания на торможение
При испытании на торможение МПРП типов 2 и 3 должны быть остановлены настолько быстро, насколько позволяют органы управления и реакция машиниста как при движении вперед, так и при движении назад. Испытания выполняются для каждого положения МПРП и комбинации уклона, нагрузок и сил, создающих совместно условия минимальной устойчивости и, если на разных высотах допускается движение с различными скоростями, то испытания следует повторять на каждой из этих высот с максимально допустимой скоростью.
Во время проведения этих испытаний моделировать воздействия максимальной скорости ветра необязательно.
Во время проведения этих испытаний МПРП не должен опрокинуться, а тормозной путь должен соответствовать 0.
5.1.4.4 Испытание на перегрузку
Испытательная нагрузка должна составлять 125% номинальной нагрузки для МПРП с приводом от источника энергии и 150% номинальной нагрузки для МПРП с ручным приводом.
Для МПРП в группе A, которые имеют удлинения платформы с номинальными нагрузками, отличающимися от номинальной нагрузки основной рабочей платформы, но не имеют специального регулирования нагрузки удлиняемой части, испытательная нагрузка должна быть такой, как определено на рисунке 14.
Нагрузки от людей, инструмента/материалов должны быть распределены на удлиняемой части платформы и, при необходимости, на основной рабочей платформе, как задано в 4.2.2.2.2.
Все движения с испытательной нагрузкой следует выполнять с соответствующими ускорениями и замедлениями с учетом безопасного управления нагрузкой. В случае если должны быть выполнены несколько движений с испытательной нагрузкой (т.е. подъем, опускание, поворот, передвижение), движения следует выполнять раздельно друг от друга и с осторожностью, особенно при наиболее неблагоприятных положениях и в ситуациях, когда необходимо дождаться прекращения колебаний МПРП, связанных с предыдущими движениями.
Когда из-за различных комбинаций нагрузок или вылетов МПРП необходимо проведение испытаний с различными испытательными нагрузками, все движения следует выполнять со всеми испытательными нагрузками, за исключением тех случаев, когда наиболее неблагоприятные условия могут быть в достаточной мере смоделированы при проведении одного испытания для проведения эксплуатационных показателей.
Во время проведения испытаний на перегрузку МПРП должен находиться на ровной поверхности, а поворотная часть - переводиться в положение, которое создает максимальное напряжение в какой-либо части МПРП, воспринимающей нагрузку.
|

1 - основная рабочая платформа; 2 - платформа удлинения (полностью выдвинутая); 3 - номинальная нагрузка, m
Номинальная нагрузка определяется выражением (см. также 4.2.1)
![]() ,
,
где ![]() ;
;
![]() ;
;
![]() - разрешенное число людей на основной рабочей платформе;
- разрешенное число людей на основной рабочей платформе;
![]() - разрешенное число людей или номинальное число рабочих на платформе удлинения;
- разрешенное число людей или номинальное число рабочих на платформе удлинения;
![]() - масса инструментов и материалов, допустимая на платформе удлинения;
- масса инструментов и материалов, допустимая на платформе удлинения;
![]() - величина, равная 80 кг (масса человека)
- величина, равная 80 кг (масса человека)
Рисунок 14 - Испытание на перегрузку
Во время проведения этих испытаний моделировать воздействие максимально допустимой скорости ветра необязательно.
Во время проведения испытаний на перегрузку должна быть возможность включения тормозной системы и удержания испытательной нагрузки (нагрузок).
После снятия испытательной нагрузки (нагрузок) на МПРП не должно быть остаточной деформации.
5.1.4.5 Испытания устойчивости и перегрузки МПРП, смонтированных на автомобильном шасси
5.1.4.5.1 Испытания на ровной местности
Каждый МПРП, установленный на шасси автомобиля, должен выдерживать статическую нагрузку, составляющую 150% номинальной нагрузки на платформу плюс 150% номинальной грузоподъемности подъемного приспособления (если МПРП таким оснащен). Нагрузка должна быть размещена в положении максимального опрокидывающего момента с МПРП на твердой и ровной поверхности. Это испытание должно быть проведено без легко снимаемых инструмента и материала на МПРП.
Нагрузка на платформу должна быть приложена в центре рабочей платформы одновременно с нагрузкой от подъемного приспособления в положении максимального опрокидывающего момента.
Одновременное приложение грузоподъемности платформы и подъемного приспособления должно быть сделано только на автомобильных МПРП, которые сконструированы для эксплуатации с обоими типами нагрузок, приложенных одновременно.
Если используемые стабилизирующие компоненты являются частью определения конфигурации, то в таком случае они должны быть использованы в соответствии с инструкциями ответственной организации для установления соответствия автомобильной МПРП требованиям устойчивости.
Во время этого испытания не требуется имитировать влияние допустимой скорости ветра.
Примечание - Во время испытания на устойчивость отрыв от земли одной или больше колесных шин или выпускных опор необязательно указывает на состояние нестабильности. Автомобильный МПРП считается устойчивым, если платформа приходит в устойчивое состояние без поворота с одновременной поддержкой испытательной нагрузки.
5.1.4.5.2 Испытания на склонах
Каждый смонтированный на автомобиле МПРП должен выдерживать статическую нагрузку, составляющую 133% номинальной нагрузки на платформу плюс 133% номинальной грузоподъемности подъемного приспособления (если МПРП таким оснащен). Нагрузка должна быть расположена в положении максимального опрокидывающего момента, когда МПРП установлен на склоне 5° в направлении наименьшей устойчивости. Испытание должно быть проведено без легко убираемых инструмента и материала на МПРП.
Нагрузка на платформу должна быть приложена в центре платформы одновременно с нагрузкой от подъемного приспособления в положении максимального опрокидывающего момента.
Если имеется состояние большей неустойчивости без нагрузок, испытание должно быть проведено и в этом состоянии (т.е. устойчивости в обратном направлении).
Если имеющиеся стабилизирующие компоненты использованы как часть определения конфигурации, они должны быть использованы в соответствии с инструкциями ответственной организации для целей установления соответствия автомобильной МПРП требованиям устойчивости.
Одновременное приложение нагрузки на платформу и подъемного приспособления должно быть сделано только для МПРП, смонтированных на автомобилях и предназначенных для эксплуатации с обоими типами нагрузок, приложенных одновременно.
Во время этого испытания не надо имитировать влияние допустимой скорости ветра.
Испытание не должно создавать состояние неустойчивости МПРП, смонтированного на автомобиле.
Примечание - Отрыв от земли одного (одной) или более колес или выносных опор не указывает на состояние неустойчивости. Автомобильный МПРП считается устойчивым, если он приходит в устойчивое состояние без поворота с одновременной поддержкой испытательной нагрузки.
5.1.4.6 Функциональные испытания
Функциональные испытания должны подтвердить, что:
a) все движения МПРП могут выполняться плавно при перемещении нагрузки, составляющей 110% номинальной нагрузки при номинальных скоростях;
b) все устройства безопасности работают исправно;
c) не превышаются максимально разрешенные скорости.
5.2 Типовые испытания
Типовые испытания проводят применительно к МПРП, в конструкцию которых внесены значительные изменения по сравнению с существующим проектом (модернизированные МПРП), а также применительно к МПРП, прошедшим капитальный ремонт.
Процесс типовых испытаний МПРП, проводимый впервые, должен включать в себя:
a) проверку конструкции - (см. 5.1.2);
b) производственный контроль - (см. 5.1.3);
c) испытания (см. 5.1.4).
Испытания проводят по программе и методике, согласованным с уполномоченными государственными надзорными органами.
Примечание - В рамках настоящего стандарта "капитальный ремонт" означает модернизацию, средний или капитальный ремонты, которые оказывают влияние на его устойчивость, прочность или рабочую характеристику.
5.3 Испытания перед выпуском в обращение
5.3.1 МПРП, не смонтированные на автомобилях
МПРП, изготовленные в соответствии с образцом, прошедшим типовые испытания перед выпуском в обращение, подвергаются приемо-сдаточным испытаниям:
a) испытание тормозов в приемлемых случаях (см. 5.1.4.3.2.3);
b) испытание на перегрузку (см. 5.1.4.4);
c) функциональное испытание (см. 5.1.4.6).
5.3.2 МПРП, смонтированные на автомобилях
МПРП, изготовленные в соответствии с образцом, прошедшим типовые испытания перед выпуском в обращение, подвергаются приемо-сдаточным испытаниям:
a) испытание тормозов в приемлемых случаях (см. 5.1.4.3.2.3);
b) испытание на перегрузку (см. 5.1.4.4);
c) проверку перегрузки и устойчивости (см. 5.1.4.5);
d) функциональное испытание (см. 5.1.4.6).
6 Эксплуатационные документы и информационные таблички
6.1 Общие положения
Эксплуатационные документы должны соответствовать требованиям ГОСТ 2.601 и настоящего стандарта, а информационные таблички - обеспечивать полноту информации о МПРП, работе органов управления и опасностях для рабочего персонала.
Эксплуатацию МПРП следует осуществлять в полном соответствии с прилагаемой к нему эксплуатационной документацией.
6.2 Эксплуатационные документы
6.2.1 Языки, на которых написаны документы
Эксплуатационные документы должны быть выполнены на русском языке.
При поставке МПРП в зарубежные страны производитель должен предоставить сборник эксплуатационных документов на государственном языке страны, в которую МПРП предназначается для поставки, учитывая дополнительные требования [4].
6.2.2 Комплектность эксплуатационных документов
Комплект эксплуатационной документации должен обязательно содержать следующие документы, но не ограничиваться только ими (см. приложение F):
- паспорт;
- руководство по эксплуатации, в котором должны быть представлены полные сведения для безопасной эксплуатации;
- инструкцию по монтажу, пуску, регулированию и обкатке МПРП.
К комплекту эксплуатационной документации должна быть приложена копия протокола сертификационных испытаний.
Инструкции по монтажу, пуску, регулированию и обкатке МПРП, а также проведению работ по техническому обслуживанию и текущему ремонту, а также модернизации применительно к предполагаемым условиям эксплуатации (см. 6.2.6), которые выполняют только специализированные организации, должны быть отделены от всех других документов.
6.2.3 Паспорт
Паспорт на МПРП составляется на предприятии-изготовителе и должен содержать полный объем сведений о МПРП и его техническом состоянии после изготовления, в процессе эксплуатации и после ремонта.
Максимальная часть сведений в паспорте должна быть напечатана, от руки должны заполняться только переменные данные. При этом необходимо вносить следующие данные о: регистрации результатов обследований, испытаний; регистрации сведений о модернизации и капитальных ремонтах; сертификации материалов.
Ответственность за составление паспорта полностью возлагается на предприятие-изготовитель.
Ответственность за полноту и сохранность внесения в паспорт сведений о результатах проверок и испытаний, переделок, ремонтов и др. возлагается на потребителя МПРП.
Примечание - Все документы, представляемые предприятиями, изготовляющими отдельные сборочные единицы, хранятся на предприятии-изготовителе.
6.2.4 Руководство по эксплуатации
Руководство по эксплуатации МПРП следует разрабатывать в соответствии с ГОСТ 2.601. Оно должно состоять из следующих частей:
- описание и работа (см. F.2.1; F2.2 приложения F);
- использование по назначению (см. F.2.1; F2.2 приложения F) с полным перечнем возможных выполняемых работ и необходимых требований безопасности при их выполнении;
- техническое обслуживание с требованиями по безопасности обслуживания, составленными с учетом конструкции МПРП (см. F.2.5 приложения F);
- текущий ремонт;
- хранение;
- транспортирование (см. F.2.2 приложения F);
- срок службы и утилизация;
- периодичность осмотра и смазки сборочных единиц (см. F.2.5 приложения F);
- перечень быстроизнашивающихся деталей и допуски на их износ;
- предельные нормы браковки элементов;
- наиболее вероятные механические повреждения металлоконструкций и способы их устранения;
- сроки и порядок проведения освидетельствования, периодических испытаний, получения разрешений на применение (изготовление) и пуск в работу;
- порядок эвакуации рабочего персонала из рабочей платформы в момент аварийной остановки на высоте.
6.2.5 Сведения о возможности модификации
В руководстве по эксплуатации или комплекте эксплуатационных документов должна содержаться информация о возможности модификации МПРП к предполагаемым условиям эксплуатации. Как минимум, должно быть указание о том, что пользователь должен получить разрешение производителя на проведение не влияющей на безопасность самостоятельной доработки, выходящей за рамки требований, определенных производителем.
6.2.6 Сведения о возможности модернизации или капитального ремонта
В комплект эксплуатационной технической документации (по договору с потребителем) может быть включена инструкция, содержащая подробные сведения о возможности проведения модернизации или капитального ремонта МПРП.
В инструкции по модернизации или капитальному ремонту должны быть даны рекомендации о том, что уровень проведения проверки конструкции (см. 5.1.2), производственного контроля (см. 5.1.3) и испытания (см. 5.2) должен соответствовать характеру выполняемой работы и объему предполагаемой модернизации или капитального ремонта.
Примечание - В рамках настоящего стандарта термины "модернизация" или "капитальный ремонт" означают модернизацию, средний или капитальный ремонты МПРП, которые оказывают влияние на его устойчивость, прочность или рабочую характеристику.
6.2.7 Краткие инструкции
Для машиниста МПРП должен быть написан краткий вариант руководства по эксплуатации МПРП, который должен быть постоянно прикреплен на видном месте, и, как правило, должен адресовать машиниста к руководству по эксплуатации.
6.3 Информационные таблички
6.3.1 Табличка данных изготовителя
На МПРП на видном месте должна быть постоянно прикреплена табличка по ГОСТ 26828 с нанесенной на ней следующей информацией:
- наименование и адрес производителя и предприятия-изготовителя;
- обозначение модели;
- серийный или заводской номер;
- год изготовления;
- конструктивная масса, кг;
- номинальная нагрузка, кг;
- номинальная нагрузка, представленная допустимым числом людей, а также массой оборудования, кг*;
- максимально допустимая сила, возникающая при воздействии вручную, H*;
- максимально допустимая скорость ветра, м/с*;
- максимально допустимый уклон поверхности;
- подача гидравлического питания, если используется внешний источник гидравлического питания*;
- подача пневматического питания, если используется внешний источник пневматического питания*;
- подача электрического питания, если используется внешний источник электрического питания*.
Примечания
1 Информация, обозначенная "*", может быть указана в других соответствующих местах МПРП (см. 6.3.2 и 6.3.7).
2 Символы должны соответствовать ГОСТ 32681 и ГОСТ 12.4.026.
3 Информация, указанная на табличках, должна сохраняться в течение всего срока службы МПРП.
6.3.2 Табличка рабочей платформы
На табличке рабочей платформы, закрепленной на видном месте, должна содержаться следующая информация с использованием символов по ГОСТ 32681 и ГОСТ 12.4.026:
- номинальная нагрузка, кг;
- номинальная нагрузка (допустимое число человек, а также масса оборудования, кг);
- максимально допустимая сила, возникающая при воздействии вручную, Н;
- максимально допустимая скорость ветра, м/с;
- допустимые нагрузки и силы, возникающие в особых условиях эксплуатации (см. 4.2.3.4);
- требования для минимальной дистанции приближения к электрическим проводам или аппаратуре под напряжением в соответствии с [4].
Кроме того, должны быть выполнены надписи:
- "С изоляционным покрытием", если рабочая платформа имеет изоляционное покрытие;
- "Без изоляционного покрытия", если рабочая платформа изготовлена из диэлектрического материала, но не имеет изоляционного покрытия.
Примечание - Для подъемников с непроводящими (изолирующими) компонентами должны быть учтены требования [3].
6.3.3 Табличка о значениях номинальных нагрузок
Если предполагается больше одного значения номинальной нагрузки, они все должны быть внесены в табличку на видном месте в зависимости от конфигурации рабочей платформы, которая может быть раздвинута, расширена или передвинута относительно поворотной части. Таблички со значениями номинальных нагрузок должны быть отчетливо видны во всех положениях и конфигурациях рабочей платформы.
6.3.4 Табличка аварийной системы
Таблички с указаниями по управлению аварийной системой (системами) должны быть размещены в непосредственной близости к соответствующим органам управления.
6.3.5 Таблички номинальных нагрузок для рабочих платформ
На МПРП с основной и вспомогательной рабочими платформами должна быть нанесена информация об общей номинальной нагрузке для каждой из рабочих платформ.
6.3.6 Таблички об условиях применения МПРП
На МПРП, которые предназначены для эксплуатации только в помещениях (ветровая нагрузка не учитывается), на видном месте должна быть четко нанесена информация об этом.
6.3.7 Маркировка мест присоединения внешнего источника питания
На места присоединения внешнего источника питания должна быть четко нанесена маркировка, содержащая полную необходимую информацию о подводимой энергии.
6.3.8 Таблички данных съемных частей
Детали и узлы, которые могут быть сняты по функциональным причинам (например, рабочие платформы, стабилизаторы), должны на видном месте иметь таблички со следующей информацией:
- наименование и адрес предприятия-изготовителя или поставщика;
- обозначение модели.
6.3.9 Окраска предполагаемых крайних точек
Все предполагаемые крайние точки конструкции МПРП должны быть покрашены в яркий цвет, указывающий на опасность, по ГОСТ 12.4.026.
6.3.10 Информация о нагрузке на колесо (опору) и давлении в шинах
Каждое колесо (опора) должно иметь постоянную и четкую маркировку с информацией о максимальной нагрузке на поверхность, которая может потребоваться при работе МПРП, и давлении для пневматических шин.
6.3.11 Ограждение опасных мест
Если невозможно обеспечить безопасные зазоры при проведении работ или соответствующее ограждение, должны быть установлены предупреждающие знаки.
6.3.12 Информация об использовании стабилизаторов
На МПРП, требующих применение стабилизаторов, на месте машиниста должен быть предупреждающий знак о необходимости установки стабилизатора.
6.3.13 Обеспечение безопасности при техническом обслуживании
Во время проведения технического обслуживания, когда рабочая платформа поднята, на МПРП должен быть установлен знак, предупреждающий персонал о запрете находиться в пространстве под поднятой платформой и поворотной частью, до тех пор пока не будут установлены средства для поддержки.
6.3.14 Предупреждающие надписи на сосудах под давлением
Гидравлическая система с газогидравлическим аккумулятором должна иметь предупреждающую надпись на газогидравлическом аккумуляторе: "Внимание! Сосуд под давлением! Разрядить перед разборкой!".
Приложение A
(справочное)
Эксплуатация МПРП при скоростях ветра выше 12,5 м/с, 6 баллов по шкале Бофорта
Оценка скорости ветра проводится по шестибалльной шкале Бофорта, принятой после анализа некоторых стандартов, и с учетом опыта пользователей МПРП. Эта шкала представляет собой естественный интервал значений, при котором большинство машинистов осознают влияние ветра и принимают решение о возможности продолжения работы или ее прекращении.
Случайное или в некоторых местах постоянное возникновение ветра с большими скоростями, которые легко могут быть замечены машинистом, и силы, появляющиеся из-за его воздействия, не являются основанием для проектирования МПРП для применения в особых условиях эксплуатации.
Следует принимать во внимание, что силы, возникающие из-за воздействия ветра и возрастающие пропорционально квадрату скорости ветра, должны рассматриваться как нагрузки и силы, возникающие в особых условиях эксплуатации (см. 4.2.3.4), и учитываться производителями и потребителями следующим образом:
a) высокие скорости ветра, превышающие 12,5 м/с, являются приемлемыми, или
b) при особых условиях эксплуатации проводится сокращение числа людей, допускаемых на рабочую платформу, о чем производитель должен дать соответствующую информацию в руководстве по эксплуатации.
Приложение B
(справочное)
Динамические коэффициенты устойчивости и расчеты конструкции
B.1 Расчеты устойчивости
При расчетах устойчивости были учтены методы ее определения, используемые в стандартах, например:
- умножение номинальной нагрузки на коэффициент. В конечном итоге этот способ является недостаточным, особенно для больших машин, имеющих большую массу элементов металлоконструкции;
- умножение на различные коэффициенты номинальной нагрузки, масс элементов металлоконструкции и других сил, действующих вертикально. Эти коэффициенты не являются постоянными в действующих стандартах и не подтверждены экспериментально или расчетным путем;
- остаточная нагрузка (т.е. процентное отношение общей массы МПРП, действующей на опорное основание на стороне, противоположной той, где находится нагрузка) при перемещении номинальной нагрузки на рабочей платформе. Это является несущественным для машин с переменной шириной стабилизаторов и с несколькими линиями опрокидывания на разном расстоянии от центра вращения.
Следовательно, использованный метод должен учитывать не только массы элементов металлоконструкции, номинальную нагрузку, силы, возникающие из-за воздействия ветра, силы, возникающие при воздействии вручную и т.д., но и при необходимости их динамические влияния, выраженные в виде процентного отношения, действующие в направлении движения. Данный метод проведения расчетов должен быть проверен типовым испытанием статической устойчивости с целью подтверждения рассчитанного опрокидывающего момента.
Тем не менее все еще остается открытым вопрос о количественном значении процентного отношения, используемого для определения динамического влияния, и было достигнуто соглашение, что этот коэффициент должен быть определен экспериментально.
Выбранный метод заключается в измерении напряжений (тензометрированием) в стабилизаторах при работе поворотной части, когда на рабочую платформу действует номинальная нагрузка, которая определяет устойчивость.
Принимая статические напряжения за единицу, колебания напряжений, возникающие при переключении органов управления в направление, соответствующее обратному движению, для снижения возможных интенсивных колебаний, меняются в пределах от минимального значения 0,9 до максимального - 1,2 по кривой, сходной с синусоидой. Считается, что динамические силы, приводящие к такому результату, могут быть определены статическим испытанием и вычислены по среднему значению (математическому ожиданию). Ранее полученное среднее значение 1,05 округлено до 1,10, чтобы тем самым предоставить достаточный запас прочности и чтобы различные предприятия-изготовители проводили сравнение получающихся в результате расчетов испытательных нагрузок с испытательными нагрузками в своих существующих методах испытаний.
В сравнении с методами испытаний (которые в значительной мере различаются между собой) метод тензометрирования показывает более низкие испытательные нагрузки для некоторых машин (ниже 10 м), сходные цифры для машин среднего размера (до 20 м) и значительно более высокие цифры для самых больших машин (до 70 м) из-за более высокого расположения центров тяжести.
Значение 1,10 (1,0 в вертикальном положении плюс 0,10 от нагрузок, действующих под углом) было принято как обеспечивающее проведение более надежного испытания всего диапазона типов и размеров машин, чем предыдущие методы. При этом значении возможно применение нагрузок для типового испытания, превышающих номинальную нагрузку от 1,5 до 8 раз, учитывая максимально возможную комбинацию нагрузок, сил и рабочих условий. Увеличение значения с 1,05 до 1,10 считается достаточным для обеспечения дополнительного запаса прочности, если учитывать малую вероятность одновременного возникновения всех наихудших условий.
Колебания, возникающие при проведении испытаний, были значительно сильнее колебаний, возникающих при однообразной случайной неправильной эксплуатации при нормальных рабочих скоростях, указывая на то, что полученные результаты имеют отношение в большей степени к поглощению энергии при упругой деформации и частоте собственных колебаний металлоконструкции, чем к рабочим скоростям.
B.2 Расчеты конструкции
Для любого условия эксплуатации колебания напряжений на верхнем конце поворотной части будут значительно больше, что требует и применения различных коэффициентов динамического влияния. Опыт, полученный в известных условиях эксплуатации, является наиболее ценной и надежной основой проектирования [13], но изготовителям рекомендуется проводить сходные испытания с выполнением тензометрических измерений для проверки того, что пиковые напряжения находятся в пределах максимально допустимого напряжения для деталей определенной конструкции. Поскольку они имеют весьма кратковременный характер, их обычно не следует учитывать при проведении расчетов на усталость.
Приложение C
(обязательное)
Расчет систем привода с использованием стальных канатов
C.1 Общие положения
Система привода с использованием стального каната состоит из канатов, огибающих канатные барабаны и/или канатные блоки, а также уравнительных блоков.
Уравнительными являются блоки, которые огибают канат во время работы, и дуга обхвата не превышает трех диаметров каната.
Категории приводов по продолжительности эксплуатации приведены в таблице C.1.
Настоящее приложение не относится к стальным канатам, которые не взаимодействуют с канатными барабанами и/или канатными блоками (несущие и натяжные канаты), а также к обвязочным канатам.
C.2 Расчет системы привода с использованием стального каната
При расчете систем приводов с использованием стальных канатов должны быть учтены факторы, влияющие на срок эксплуатации стального каната:
a) режим работы (группа привода в соответствии с таблицей C.1);
b) диаметр стального каната (коэффициент c);
c) диаметры канатных барабанов, блоков и уравнительных блоков (коэффициенты ![]() и
и ![]() );
);
d) профиль канавки для каната.
Таблица C.1 - Группы приводов по категориям продолжительности эксплуатации
Категория нагружения | Обозначение категории по продолжительности эксплуатации | ||||||||
Среднее время работы привода в день в часах в течение года | |||||||||
До 0,125 | От 0,125 до 0,25 | От 0,25 до 0,5 | От 0,5 до 1 | От 1 до 2 | От 2 до 4 | От 4 до 8 | От 8 до 16 | Более 16 | |
Легкая (максимальные нагрузки возникают редко) | 1 Em | 1 Em | 1 Dm | 1 Cm | 1 Bm | 1 Am | 2m | 3m | 4m |
Средняя (малая, средняя и максимальная нагрузки возникают приблизительно с одинаковой частотой) | 1 Em | 1 Dm | 1 Cm | 1 Bm | 1 Am | 2m | 3m | 4m | 5m |
Тяжелая (максимальные нагрузки возникают почти постоянно) | 1 Dm | 1 Cm | 1 Bm | 1 Am | 2m | 3m | 4m | 5m | 5m |
Примечание - Если продолжительность цикла нагружения привода составляет 12 мин или больше, он может быть отнесен к предыдущей группе приводов, для соответствующей категории нагружения. | |||||||||
C.3 Расчет минимальных диаметров стальных канатов
Минимальный диаметр каната, ![]() , в миллиметрах определяется в соответствии с формулой, указанной ниже, в зависимости от усилия S в ньютонах, приложенного к канату:
, в миллиметрах определяется в соответствии с формулой, указанной ниже, в зависимости от усилия S в ньютонах, приложенного к канату:
![]() . (C.1)
. (C.1)
Значения коэффициента c, ![]() приведены в таблице C.2 для различных групп приводов.
приведены в таблице C.2 для различных групп приводов.
Расчетное усилие в канате S определяется как натяжение при статических нагрузках с учетом сил ускорения и коэффициента полезного действия канатно-блочной системы привода (см. C.5).
Силы ускорения, составляющие до 10% статических нагрузок, допускается не учитывать.
Таблица C.2 - Коэффициенты c для стальных канатов, которые не скручиваются
Группа приводов | Коэффициент c, | |||
Номинальная прочность отдельных проволочек, Н/мм | ||||
1570 | 1770 | 1960 | 2160 | |
1 Em | - | 0,0670 | 0,0630 | 0,0600 |
1 Dm | - | 0,0710 | 0,0670 | 0,0630 |
1 Cm | - | 0,0750 | 0,0710 | 0,0670 |
1 Bm | 0,0850 | 0,0800 | 0,0750 | - |
1 Am | 0,0900 | 0,0850 | - | |
2m | 0,095 | - | ||
3m | 0,106 | - | ||
4m | 0,118 | - | ||
5m | 0,132 | - | ||
C.4 Расчет диаметров канатных барабанов, блоков и уравнительных блоков
Диаметр D канатных барабанов, блоков и уравнительных блоков по средней линии навитого каната (выбранного в соответствии с C.3) диаметром ![]() определяется по формуле
определяется по формуле
![]() . (C.2)
. (C.2)
Здесь ![]() и
и ![]() являются безразмерными коэффициентами. Значения коэффициента
являются безразмерными коэффициентами. Значения коэффициента ![]() зависят от группы приводов и конструкции каната и приведены в таблице C.3. Значения коэффициента
зависят от группы приводов и конструкции каната и приведены в таблице C.3. Значения коэффициента ![]() зависят от компоновки привода с использованием стального каната и приведены в таблице C.4.
зависят от компоновки привода с использованием стального каната и приведены в таблице C.4.
Таблица C.3 - Коэффициент ![]()
Группа приводов | Канатный барабан | Канатный блок | Уравнительный блок |
1 Em | 10 | 11,2 | 10 |
1 Dm | 11,2 | 12,5 | 10 |
1 Cm | 12,5 | 14 | 12,5 |
1 Bm | 14 | 16 | 12,5 |
1 Am | 16 | 18 | 14 |
1m | 18 | 20 | 14 |
3m | 20 | 22,4 | 16 |
4m | 22,4 | 25 | 16 |
5m | 25 | 28 | 18 |
Для определения ![]() системы привода с использованием канатов классифицируются согласно числу
системы привода с использованием канатов классифицируются согласно числу ![]() , характеризующему переменные изгибающие напряжения в наиболее неблагоприятной напряженной части каната, которая прокручивается через привод на протяжении одного цикла нагрузки (подъем и опускание груза). Значение
, характеризующему переменные изгибающие напряжения в наиболее неблагоприятной напряженной части каната, которая прокручивается через привод на протяжении одного цикла нагрузки (подъем и опускание груза). Значение ![]() вводится как сумма следующих отдельных значений для элементов системы привода с использованием стального каната:
вводится как сумма следующих отдельных значений для элементов системы привода с использованием стального каната:
- барабан для намотки стального каната - ![]() =1;
=1;
- канатный блок для отклонения в том же направлении, ![]() ;
;
- канатный блок для отклонения в обратном направлении, ![]() ;
;
- канатный блок ![]() (см. рисунок C.1) -
(см. рисунок C.1) - ![]() =0;
=0;
- уравнительный блок - ![]() =0;
=0;
- концевое крепление каната - ![]() =0.
=0.
|

Рисунок C.1 - Угол отклонения
Отклонение в обратном направлении следует принимать во внимание, если угол между плоскостями двух смежных канатных блоков (пройденный канатом подряд) больше 120° (см. рисунок C.2).
|

Рисунок C.2 - Отклонение в одном и том же/обратном направлении
Таблица C.4 - Коэффициент ![]()
Описание | Примеры компоновки приводов с использованием стальных канатов. |
|
| |
Примеры применения (барабаны показаны сдвоенными линиями) | канатных барабанов и уравни- тельных блоков | канат- ных блоков | ||
Стальной канат навивается на барабан и далее через - два блока с отклонением в том же самом направлении, или - один блок с отклонением в обратном направлении |
|
| 1 | 1 |
Стальной канат навивается на барабан и далее через - четыре блока с отклонением в том же самом направлении, или - два блока с отклонением в том же самом направлении и один блок с отклонением в обратном направлении, или - два блока с отклонением в обратном направлении |
| 6-9 | 1 | 1,12 |
Стальной канат навивается на барабан и далее, по меньшей мере, через - пять блоков с отклонением в том же самом направлении, или - три блока с отклонением в том же самом направлении плюс один блок с отклонением в обратном направлении, или - один блок с отклонением в том же самом направлении плюс два блока с отклонением в обратном направлении, или - три блока с отклонением в обратном направлении |
|
| 1 | 1,25 |
Примечание - Корреляция
| ||||



C.5 Коэффициент полезного действия систем приводов с использованием каната
КПД канатного привода ![]() при вычислении усилия в канате определяется следующим образом:
при вычислении усилия в канате определяется следующим образом:
![]() , (C.3)
, (C.3)
где ![]() - КПД системы привода с использованием стального каната;
- КПД системы привода с использованием стального каната;
![]() - КПД одного канатного блока;
- КПД одного канатного блока;
- число неподвижных канатных блоков между барабаном и полиспастом или грузом;
![]() - КПД полиспаста, определяемый по формуле
- КПД полиспаста, определяемый по формуле
![]() , (C.4)
, (C.4)
где n - число ветвей каната в одном полиспасте [один полиспаст состоит из суммы всех ветвей каната и канатных блоков для одной ветви каната, наматываемого на канатный барабан (см. рисунок C.3)].
|
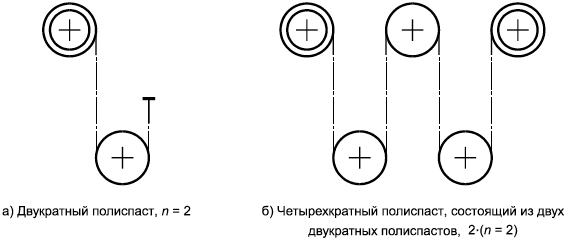
Рисунок C.3 - Полиспасты
КПД канатного блока зависит от отношения диаметра канатного блока к диаметру стального каната D/d, от конструкции и смазки каната. Кроме того, он зависит от типа подшипника канатного блока (подшипник скольжения или подшипник качения). Насколько точнее значения подтверждены посредством испытаний, настолько следующее должно быть допустимым для вычислений:
a) для подшипников скольжения ![]() =0,96;
=0,96;
b) для подшипников качения ![]() =0,98.
=0,98.
КПД, приведенные в таблице C.5, вычислены на основе упомянутых выше значений.
КПД уравнительных блоков допускается не учитывать.
Таблица C.5 - КПД полиспастов
n | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
подшипников скольжения | 0,98 | 0,96 | 0,94 | 0,92 | 0,91 | 0,89 | 0,87 | 0,85 | 0,84 | 0,82 | 0,81 | 0,79 | 0,78 |
подшипников качения | 0,99 | 0,98 | 0,97 | 0,96 | 0,95 | 0,94 | 0,93 | 0,92 | 0,91 | 0,91 | 0,90 | 0,89 | 0,88 |
Приложение D
(справочное)
Пример вычислений. Системы приводов с использованием стальных канатов
D.1 Метод
D.1.1 Общие положения
Метод, данный в приложении C, используется для того, чтобы установить коэффициенты и отношения для применения по 4.5.2 (канатные системы приводов), используя показатели циклов 4.2.4.2.3 и рабочие скорости в 4.4.5.
Этот метод предпочтительнее, чем метод классификации механизмов по группам в соответствии с [14], который касается проблем, относящихся к состоянию нагрузки и коэффициентов распределения нагрузки для МПРП, но дает результаты в соответствии с международными стандартами, касающимися самоходных кранов (см. [15] и [16]).
Примечание 1 - Согласно 4.2.4.2.3 легкий прерывистый режим работы интерпретируется как режим для больших машин с большими номинальными нагрузками, которые часто работают с нагрузкой меньше номинальной и используются периодически. В то же время тяжелый режим работы интерпретируется как режим для машин меньшего размера с низкими номинальными нагрузками, регулярно несущих полную номинальную нагрузку и используемых регулярно. Режим тяжелой работы применяется только к системам выравнивания на машинах с низкими номинальными нагрузками (например, один рабочий), носимыми на протяжении результата каждого нагрузочного цикла. Режим тяжелой работы не применяется к МПРП, хотя задействуется та же самая группа приводов, которая использована в примере. Средний режим работы (см. таблицу C.1) - наиболее тяжелые условия работы для подъемного оборудования, когда нагрузка меняется на протяжении нагрузочного цикла.
Примечание 2 - Взят самый худший возможный случай (например, единичная жесткая стрела движется по дуге для достижения максимальной высоты). На практике это перемещение достигается путем использования более одного вылета стрелы, средняя продолжительность работы делится на число вылетов и далее уменьшается за счет более высоких рабочих скоростей телескопических перемещений.
Примечание 3 - В настоящем анализе нагрузочный цикл начинается с загрузки рабочей платформы в каком-то положении и заканчивается при разгрузке в том же самом положении после выдвижения в рабочую позицию.
D.1.2 Краткое изложение метода приложения C
D.1.2.1 Используют ряд нагрузочных циклов и рабочих скоростей из 4.4.5, чтобы вывести среднее рабочее время в день в часах, отнесенное к одному году в таблице C.1, для определения группы приводов [см. перечисление b) C.2)].
D.1.2.2 Вычисляют минимальный теоретический диаметр стального каната ![]() , используя в формуле (C.1) коэффициент c для этой группы приводов по таблице C.2
, используя в формуле (C.1) коэффициент c для этой группы приводов по таблице C.2
![]() ,
,
где S - расчетная тяговая сила в канате.
Этим завершается процесс, приведенный в приложении C для вычисления диаметра стального каната. Однако коэффициент использования может быть вычислен путем деления значений разрушающего усилия по таблице 5 [9], скорректированных, при необходимости, для разной прочности каната на расчетную тяговую силу в этом канате.
D.1.2.3 Вычисляют диаметры барабанов и блоков по формуле (C.2):
![]() .
.
Коэффициент ![]() для группы приводов принимают по таблице C.3. Коэффициент
для группы приводов принимают по таблице C.3. Коэффициент ![]() определяют по общему числу переменных напряжений в наиболее неблагоприятной напряженной части каната, используя таблицу C.4.
определяют по общему числу переменных напряжений в наиболее неблагоприятной напряженной части каната, используя таблицу C.4.
D.1.3 Пример вычисления
D.1.3.1 Общие положения
Следующий пример иллюстрирует вычислительный процесс, но значения нагрузок выбраны с таким расчетом, чтобы получить для стального каната точный диаметр 9 мм, поэтому коэффициенты в таблице C.2 являются минимальными.
D.1.3.2 Режим работы (группа приводов)
См. C.2 и таблицу C.1.
D.1.3.2.1 Случай 1, легкий прерывистый режим работы
40000 нагрузочных циклов за 10 лет =40000:(365·10)=10,96 циклов нагрузки в день. (D.1)
Рассматривается наихудший случай, когда стрела радиусом =25 м перемещается через 180° (всего 360°) со скоростью v=0,4 м/с (см. рисунок D.1).
|

Рисунок D.1 - Случай 1
Продолжительность работы для одного нагрузочного цикла составляет 393 с
![]() . (D.2)
. (D.2)
Средняя продолжительность работы в день, в часах, отнесенная к одному году, является результатом решения уравнений (D.1) и (D.2)
10,96·393 с/день =1,12 ч/день
категория
(см. таблицу C.1).
Таблица C.1 дает группу приводов ![]() для категории
для категории , средний режим работы.
D.1.3.2.2 Случай 2 - тяжелый режим работы
100000 нагрузочных циклов за 10 лет =100000:(365•10)=27,4 цикла нагрузки в день. (D.3)
Рассматривается наихудший случай, когда стрела радиусом =10 м перемещается через 90° (всего 180°) со скоростью 0,4 м/с (v) (см. рисунок D.2).
|

Рисунок D.2 - Случай 2
Продолжительность работы для одного нагрузочного цикла составляет 78,5 с
![]() . (D.4)
. (D.4)
Средняя продолжительность работы в день, в часах, отнесенная к одному году, является результатом решения уравнений (D.3) и (D.4)
78,5·27,4 с/день =0,6 ч/день
категория
(см. таблицу C.1).
Таблица C.1 дает группу приводов ![]() для категории
для категории , тяжелый режим работы.
Таким образом, группа приводов ![]() одобрена в качестве подходящей группы для всех МПРП, соответствующих настоящему стандарту.
одобрена в качестве подходящей группы для всех МПРП, соответствующих настоящему стандарту.
D.1.3.3 Вычисление минимального диаметра каната (см. C.3)
Минимальный диаметр каната определяют с помощью формулы (C.1)
![]() ,
,
где S - расчетная нагрузка на канате в ньютонах.
Для приводов группы ![]() , таблица C.2 дает:
, таблица C.2 дает:
c=0,0900 для канатов со степенью растяжения 1570 Н/мм;
c=0,0850 для канатов со степенью растяжения 1770 Н/мм;
c=0,0850 для канатов со степенью растяжения 1960 Н/мм;
при отсутствии скручивания.
Для S=10000 Н и c=0,0900, для S=11211 Н и c=0,0850 упомянутое выше вычисление дает минимальный диаметр стального каната 9 мм.
D.1.3.4 Рабочие коэффициенты
По таблице 5 [9] минимальное разрушающее усилие для проволочных канатов диаметром 9 мм составляет:
![]() =47300 Н (волоконный сердечник),
=47300 Н (волоконный сердечник),
![]() =51000 Н (стальной сердечник).
=51000 Н (стальной сердечник).
На основе таблицы 5 [9] (степень растяжения 1770 Н/мм) получаем рабочие коэффициенты, приведенные в таблице D.1 для канатов диаметром 9 мм.
Таблица D.1 - Рабочие коэффициенты
Степень растяжения, Н/мм | Рабочий коэффициент | Формула | |
Волоконный сердечник | Стальной сердечник | ||
1770 (S=11211 Н) | 4,22 | 4,55 |
|
1570 (S=10000 Н) | 4,20 | 4,52 |
|
1960 (S=11211 Н) | 4,67 | 5,04 |
|
D.2 Вычисления диаметров канатных барабанов, канатных блоков и уравнительных блоков
Согласно формуле (C.2)
![]() .
.
Коэффициенты ![]() для группы приводов
для группы приводов ![]() принимают по таблице C.3.
принимают по таблице C.3.
Коэффициенты ![]() определяются общим числом
определяются общим числом ![]() переменных напряжений в наиболее неблагоприятной напряженной части каната по C.4. Рисунок D.3 и таблица D.3 показывают, что значение
переменных напряжений в наиболее неблагоприятной напряженной части каната по C.4. Рисунок D.3 и таблица D.3 показывают, что значение ![]() для МПРП обычно равно 1.
для МПРП обычно равно 1.
В этих обстоятельствах
![]()
и отношения, приведенные в таблице D.2, есть результат вычисления для МПРП.
Таблица D.2 - Отношение ![]()
Описание |
|
|
|
|
Канатный барабан |
| 1 | 16 | 16 |
6-9 | 1 | 16 | 16 | |
| 1 | 16 | 16 | |
Отклонение канатного блока |
| 1 | 18 | 18 |
6-9 | 1,12 | 18 | 20,16 | |
| 1,25 | 18 | 22,5 | |
Отклонение канатного блока |
| 1 | 18 | 18 |
6-9 | 1,12 | 18 | 20,16 | |
| 1,25 | 18 | 22,5 | |
Отклонение канатного блока |
| 1 | 14 | 14 |
компенсирующий блок (например, концевое прикрепление | 6-9 | 1 | 14 | 14 |
каната) |
| 1 | 14 | 14 |
|

1 - барабан для двух канатов; 2 - канатный блок (отклонение в обратном направлении); 3 - канатный блок (отклонение в том же самом направлении); 4 - канатный блок (отклонение в том же самом направлении); 5 - концевое прикрепление каната
Рисунок D.3 - Определение числа переменных изгибающих напряжений ![]() в отдельных проволочных канатах для определения диаметров барабанов и блоков для втянутого/выдвинутого подъемного оборудования (см. таблицу D.3)
в отдельных проволочных канатах для определения диаметров барабанов и блоков для втянутого/выдвинутого подъемного оборудования (см. таблицу D.3)
Таблица D.3 - Число ![]()
Канат | Число переменных изгибающих напряжений
|
|
A1 | 1 | 1 |
A2 | 2 | 1 |
B | 1+4=5 | 1 |
C | 2 | 1 |
Приложение E
(справочное)
Расчеты для испытания устойчивости при наезде на бордюр или углубление
E.1 Общие положения
Настоящее приложение дает энергетический метод оценки устойчивости МПРП в ситуациях динамического удара, например в следующих случаях:
a) движение МПРП с поднятой стрелой приводит к столкновению во время испытания с наездом на бордюр обочины и проездом впадины (см. 5.1.4.3.2.3), когда МПРП не удается преодолеть эти препятствия;
b) МПРП с подъемной стрелой в опущенном положении проваливается в углубление при съезде с бордюрного камня во время испытания устойчивости (см. 5.1.4.3.2.2);
c) осуществляется проверка торможения МПРП при номинальном наклоне шасси (см. 5.1.4.3.2.3).
Нижеследующий пример ситуации столкновения, упомянутого в перечислении a), см. на рисунках E.1-E.3.
Кинетическая энергия ![]() для конкретной МПРП:
для конкретной МПРП:
![]() ,
,
где m - масса МПРП, кг;
v - скорость (0,7 м/с для данного примера).
Потенциальная энергия ![]() , необходимая для опрокидывания
, необходимая для опрокидывания
![]() ,
,
где ![]() - ускорение силы тяжести (
- ускорение силы тяжести (![]() =9,81 м/с).
=9,81 м/с).
Заключение:
![]() , т.е. опрокидывания не происходит.
, т.е. опрокидывания не происходит.
|

Рисунок E.1 - МПРП перед препятствием
|

________________
![]() Линия опрокидывания.
Линия опрокидывания.
Рисунок E.2 - Наезд МПРП на препятствие
|

________________
![]() Линия опрокидывания.
Линия опрокидывания.
Рисунок E.3 - Потенциальная энергия
E.2 Вывод фактора z
Фактор z характеризуется в 4.2.2.2.1 и показан на рисунках 2b) и 2c). Фактор z имеет единицы измерения ускорения и дает линейное решение для события нелинейного столкновения.
С учетом рисунка E.4 и предыдущих вычислений получают следующее.
В точке неустойчивости кинетическая энергия равна гравитационной потенциальной энергии.
Принимают моменты относительно линии опрокидывания:
![]() ;
;
![]() .
.
При ![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
|

________________
![]() Линия опрокидывания.
Линия опрокидывания.
Рисунок Е.4 - Фактор z
Приложение F
(справочное)
Руководство по эксплуатации
F.1 Общие положения
В приложении представлен минимальный перечень технической информации, который должен содержать, но не ограничиваться только ею, следующую информацию для обеспечения безопасной эксплуатации МПРП. См. также [4] и ГОСТ 33636.
F.2 Руководство по эксплуатации
F.2.1 В руководстве по эксплуатации следует указать подробности безопасной эксплуатации, включая следующее:
a) информацию о характеристиках и описание МПРП, а также наладку МПРП и ее использование по назначению;
b) необходимая несущая способность грунта;
c) местоположение, назначение и использование средств управления, оборудования для опускания и останова в непредвиденных ситуациях;
d) запрет перегрузки рабочей платформы;
e) запрет использования в качестве подъемного крана;
f) строгое соблюдение национальных правил дорожного движения;
g) сохранение свободного пространства вблизи линий электропередачи под напряжением;
h) уклонение от соприкосновения с неподвижными (здания и т.д.) и подвижными объектами (автотранспорт, краны и т.д.);
i) запрет любого увеличения в досягаемости или рабочей высоте МПРП путем использования дополнительного оборудования (например, лестниц);
j) запрет любого дополнения, которое могло бы увеличить ветровую нагрузку на МПРП, например с помощью объявлений (исключения см. в 4.2.2.5);
k) окружающие ограничения;
l) информацию о вибрациях;
m) важные ежедневные проверки состояния безопасности машины (утечки масла, ослабление электрических фитингов/соединений, изношенность шлангов/кабелей, состояние шин/тормозов/аккумуляторов, повреждение от столкновения, пластинки с устаревшими инструкциями, специальные устройства безопасности и т.д.);
n) установку съемных ограждений;
o) запрет посадки на рабочую платформу и выхода с нее в поднятом положении;
p) предохранительные меры для движения с поднятой рабочей платформой;
q) в приемлемых случаях требования ответственной организации к оборудованию для предотвращения падения с высоты;
r) требования по минимальной дистанции приближения к электрическим линиям и аппаратам под напряжением, как определено в [4] или национальными, или другими более жесткими правилами.
F.2.2 В руководстве по эксплуатации следует предоставить информацию по транспортированию, обращению и хранению, включая следующее:
a) любые меры предосторожности в отношении крепления частей МПРП для транспортирования между местами использования;
b) метод погрузки на другие транспортные средства/суда, обеспечивающие перевозку между местами использования, включая точки подъема, массу, центр тяжести и т.д. для целей подъема;
c) меры предосторожности, которые надо принимать перед хранением снаружи или внутри помещения;
d) проверки, которые надо проводить до использования после периодов хранения, внешнего воздействия экстремальных условий окружающей среды, например жар, холод, влажность, пыль и т.д.
F.2.3 В руководстве по эксплуатации следует предусмотреть информацию по вводу в промышленное использование, включая следующее:
a) необходимо проводить испытания перед размещением МПРП на рынке сбыта (см.5.3);
b) необходимо проверять энергоснабжение, гидравлические масла, смазки и т.д. при первом использовании, после долгих периодов хранения или изменений в окружающих условиях (зима, лето, новое географическое местоположение и т.д.).
F.2.4 В руководстве по эксплуатации следует указать рекомендованные ответственной организацией периодические освидетельствования или испытания, включая следующее:
a) периодические освидетельствования или испытания надо проводить в соответствии с эксплуатационными условиями и частотой использования;
b) содержание периодических освидетельствований и испытаний, т.е.:
- визуальный осмотр конструкции, обращая особое внимание на коррозию и другое повреждение несущих частей и сварных швов,
- обследование механических, гидравлических, пневматических и электрических систем, обращая особое внимание на устройства обеспечения безопасности,
- испытание, доказывающее эффективность тормозов и/или устройств защиты от перегрузки, и
- функциональные испытания (см. 5.1.4.6);
c) информацию о том, что частота и степень периодических обследований и испытаний могут также зависеть от национальных правил.
Примечание - Общепринято, что нет необходимости осуществлять разборку частей на периодических обследованиях, если нет сомнений в их надежности и безопасности. Снятие крышек, открывание смотровых отверстий и приведение МПРП в транспортное положение не считаются разборкой.
F.2.5 В руководстве по эксплуатации следует предоставить информацию по техническому обслуживанию подготовленным персоналом, включая следующее:
a) техническую информацию о МПРП с электрическими/гидравлическими/ пневматическими принципиальными схемами;
b) расходуемые продукты, наличие которых требуется периодически/часто проверять (смазки, уровень масла гидравлических систем, состояние аккумуляторов);
c) свойства безопасности, подлежащие проверке через заданные интервалы, и оборудование аварийного останова;
d) меры, принимаемые для обеспечения безопасности во время технического обслуживания;
e) проверка на любое опасное ухудшение (коррозия, появление трещин, истирание и т.д.);
f) критерии метода и повторяемость обследования и ремонта/замены частей, в том числе:
- для систем приводов, использующих стальные канаты, единичные канаты согласно 4.5.2.1.2 или первые и вторые канаты в системах согласно перечислениям a), b) или c) 4.5.2.1.3 следует заменять при обнаружении пределов износа, указанных в [17], в любом одном из упомянутых выше канатов,
- для систем цепного привода, единичные цепи согласно 4.5.3.1.2 или пары цепей согласно перечислениям a) или b) 4.5.3.1.3 следует заменять при обнаружении пределов износа в любой одной из упомянутых выше цепей, и
- другие компоненты в приемлемом случае (например, ожидаемый срок службы);
g) важность применения для замены только утвержденных ответственной организацией запасных частей, особенно компонентов, имеющих отношение к обеспечению безопасности;
h) необходимость одобрения ответственной организацией любой переделки, которая может влиять на устойчивость, прочность или рабочую характеристику;
i) части, требующие регулировку, включая подробности наладки;
j) любые необходимые испытания/проверки после технического обслуживания для гарантии безопасного рабочего режима.
Приложение G
(обязательное)
Дополнительные требования к дистанционным системам управления
G.1 Общие положения
Беспроводные средства управления должны быть сконструированы согласно [18], с дополнениями, данными в настоящем приложении.
Передатчик не должен функционировать при действующих средствах предотвращения несанкционированного использования (4.3.16).
G.2 Ограничение управления
G.2.1 О включении передатчика должна быть соответствующая индикация без инициирования какого-либо движения МПРП.
G.2.2 Приемник должен давать выходные рабочие команды в систему управления только в случае приема фреймов, содержащих правильные адреса и команды.
G.2.3 Контактор МПРП должен получать электрическое питание (т.е. приведен в состояние "вкл."), с получением по меньшей мере одного правильного фрейма без каких-либо рабочих команд, но содержащий стартовую команду.
G.2.4 Чтобы избежать случайных перемещений после любой ситуации, вызвавшей остановку МПРП (например, сбой энергоснабжения, замена аккумулятора или состояние потери сигнала), система должна выдавать рабочие команды, имеющие результатом любое перемещение МПРП только после возвращения машинистом средств управления в положение "выкл." на подходящий период времени, т.е. до получения по меньшей мере одного фрейма без каких-либо рабочих команд.
G.2.5 В случае отключения электрического питания на переключателе МПРП все выходные сигналы рабочих команд от приемника на движения МПРП должны пропадать.
G.3 Останов
G.3.1 Часть беспроводной системы управления, которая должна выполнять функцию останова, является частью системы управления МПРП, имеющей отношение к обеспечению безопасности.
G.3.2 Система управления должна инициировать останов всех движений МПРП при отсутствии корректного приема действительного фрейма в пределах 0,5 с.
G.3.3 Если текущий контроль, осуществляемый приемником, определяет, что состояние системы управления не соответствует состоянию выходных сигналов приемника, то останов, заданный в G.3.2, должен также отключить электрическое питание на переключатель МПРП. Если текущий контроль, осуществляемый приемником, определяет, что состояние системы управления соответствует состоянию выходных сигналов приемника, то отключение электрического питания переключателя МПРП может быть задержано максимум на 5 мин.
G.3.4 Если функции аварийного останова категории 0 согласно требованию [18] создают любой дополнительный риск, то функция останова может быть категории 1.
G.4 Обмен данными, передаваемыми последовательно
G.4.1 Фрейм должен передаваться неоднократно в течение операции.
G.4.2 Система должна обеспечивать надежность передачи на расстояние Хэмминга общего числа битов в фрейме, деленного на 20, и не меньше 4, или она должна использовать другие средства, которые обеспечивают равный уровень надежности, так что вероятность прохождения ошибочного фрейма составляет менее 10![]() .
.
G.5 Использование более одного поста, с которого машинист осуществляет управление
G.5.1 Переход управления от одного передатчика к другому не должен быть возможным до выключения первого передатчика преднамеренным действием, специально предусмотренным для такой цели.
G.5.2 Должно быть предоставлено средство для обеспечения возможности работы нескольких пар передатчик/приемник в определенном передающем диапазоне без создания нежелательных помех друг другу.
G.5.3 Средство, предоставленное в G.5.2, должно быть защищено от случайного или непреднамеренного изменения.
G.6 Посты управления для машинистов, которые получают питание от аккумуляторов
После предупреждения и периода времени, которое требуется согласно [18] (когда напряжение аккумулятора становится настолько низким, что надежная передача не может быть гарантирована), передатчик должен автоматически блокироваться (т.е. приемник останавливает все движения МПРП и отключает электрическое питание переключателя МПРП).
G.7 Приемник
Приемник должен выдерживать вибрации на испытании Fh в случайной широкой полосе частот в соответствии с ГОСТ 30630.1.9.
G.8 Предупреждения
В случае, когда можно ожидать появление людей вблизи МПРП или его части (например, при движении или повороте МПРП) и существует риск захвата людей, наезда и т.д., должны быть дополнительные предупреждения.
МПРП должна иметь маркировку в месте доступа на платформу с объяснением, что МПРП оборудована беспроводной системой управления, а также иметь непрерывное наглядное предупреждение, когда беспроводная система управления занята, либо автоматическое акустическое и/или наглядное предупреждение до начала движения МПРП.
G.9 Информация для использования
G.9.1 Инструкции производителя должны включать в себя монтажную информацию для гарантии, что при использовании беспроводной системы управления она не будет создавать помехи другим системам или ей не будут мешать другие системы в месте эксплуатации.
G.9.2 Производитель должен обеспечить реальную задержку для функции останова, заданной по G.3.2.
Приложение H
(справочное)
Перечень значимых потенциальных опасностей
Опасности определены при помощи процедуры оценки риска и представлены в виде таблицы Н.1. Опасности, которые не определены пунктами настоящего стандарта, но могут иметь место, обозначены как НУ (не указанные).
Таблица H.1 - Перечень потенциальных опасностей
Опасность | Соответствующий пункт настоящего стандарта | |
1 Механические опасности | ||
1.1 Опасность раздавливания | 4.2.4, 4.3.4, 4.3.5, 4.3.22, 4.4.3, 4.6.10, 4.7.1, 6.3.13, 6.3.14 | |
1.2 Опасность рассечения | 4.4.3, 4.7.1, 6.3.13 | |
1.3 Опасность пореза или разрыва | НУ | |
1.4 Опасность запутывания | 4.3.19, 6.3.13 | |
1.5 Опасность зацепиться или оказаться заблокированным | 4.3.19, 6.3.13 | |
1.6 Опасность удара | 4.3.5, 4.3.22, перечисление h) F.2.1 | |
1.7 Опасность укола или получения раны | НУ | |
1.8 Опасность получения ссадины или царапины | перечисление e) F.2.5 | |
1.9 Опасность истечения жидкости под высоким давлением | 4.9.1, 4.9.2, 4.9.3, 4.9.4, 4.9.5, 4.9.10 | |
1.10 Выбрасывание предметов | НУ | |
1.11 Потеря устойчивости (подъемника, узлов или деталей отдельных механизмов) | 4.2, 4.3.2, 4.3.6, 4.3.7, 4.3.8, 4.3.9 | |
1.12 Опасности скольжения, перемещения и падения | 4.6.2, 4.6.4, 4.6.5, 4.6.6, 4.6.7, 4.6.8, 6.3.13 | |
2 Опасности, вызванные поражением электрическим током | ||
2.1 Электрический контакт (прямой или косвенный) | 4.8, перечисление g) F.2.1 | |
2.2 Электростатические явления | НУ | |
2.3 Тепловые излучения электрического оборудования | НУ | |
2.4 Внешние влияния на электрическое оборудование | 4.8.1, 4.8.6 | |
3 Опасности, вызванные тепловым воздействием | ||
3.1 Ожоги и ошпаривания при возможном контакте человека с пламенем или взрывом, а также излучении источников тепла | 4.3.20 | |
3.2 Вредное воздействие повышенных или пониженных температур окружающей среды | 4.3.20 | |
4 Опасности, вызванные шумом | ||
4.1 Потеря слуха (глухота), другие психофизиологические расстройства (например, потеря равновесия, потеря сознания и т.д.) | 4.6.17 | |
4.2 Акустические помехи для звуковой связи, акустические сигналы и т.д. | 4.6.17 | |
5 Опасности, вызванные вибрацией (приводящие к различным неврологическим и сосудистым расстройствам) | перечисление l) F.2.1 | |
6 Опасности, вызванные излучением | ||
6.1 Электрические дуги | перечисление g) F.2.1 | |
6.2 Лазеры | НУ | |
6.3 Источники ионизирующего излучения | НУ | |
6.4 Машины, использующие высокочастотные электромагнитные поля | 4.8.1, 4.8.6 | |
7 Опасности, вызванные материалами и веществами, обрабатываемыми, используемыми или выделяемыми машинами | ||
7.1 Опасности, возникающие при контакте с вредными жидкостями или при вдыхании газов, пыли и испарений | 4.3.20 | |
7.2 Опасность от возгорания или взрыва | 4.3.21 | |
7.3 Биологические и микробиологические (вирусные или бактериальные) опасности | НУ | |
8 Опасности, возникающие из-за пренебрежения эргономическими принципами при конструировании машин (несоответствие машины человеческим характеристикам и возможностям) | ||
8.1 Опасные для здоровья позы или чрезмерные усилия | 4.6.7, 4.6.8 | |
8.2 Не в полной мере проведенный учет анатомии конечностей человека | НУ | |
8.3 Пренебрежение к использованию индивидуального защитного оборудования | НУ | |
8.4 Недостаточное освещение рабочего места водителя | НУ | |
8.5 Психическая перегрузка или стресс и т.д. | НУ | |
8.6 Человеческий фактор | 4.7.1, 4.7.2 | |
9 Комбинации потенциальных опасностей | ||
10 Опасности, вызванные отказом в подаче питания, поломкой частей машины и другими функциональными неполадками | ||
10.1 Отказ в подаче питания | 4.3.15, 4.7.6, 4.7.7, 4.7.8, 4.7.9 | |
10.2 Неожиданный выброс деталей машины или рабочей жидкости | НУ | |
10.3 Отказ (неисправность) системы управления | 4.7.4, 4.7.7 | |
10.4 Ошибка при установке | 4.8.1 | |
10.5 Опрокидывание, неожиданная потеря устойчивости машины | 4.2, 4.3.2, 4.3.6, 4.3.7, 6.3.1 k) | |
11 Опасности, вызванные (временным) отсутствием мероприятий, и/или неправильным расположением средств, имеющих отношение к безопасности | ||
11.1 Все виды ограждений | 4.3.19 | |
11.2 Все виды устройств, относящихся к безопасности (защите) | 4.3.8 | |
11.3 Устройства пуска и останова | 4.3.1, 4.4.5, 4.5.2.7, 4.5.3.6, 4.5.5.2, 4.6.4, 4.7.1, 4.7.2, 4.7.3, 4.7.4, 4.7.5, 4.7.6, 4.7.7, 4.7.8, 4.11.3 | |
11.4 Знаки и сигналы безопасности | 4.3.2, 4.6.11, 4.7.2, 4.9.10 | |
11.5 Все виды информации или предупреждающие устройства | 4.3.2, 4.6.12, 6.2, перечисление c) F.2.1, перечисление F.2.2 | |
11.6 Устройства отключения питания | 4.8.2 | |
11.7 Аварийные устройства | 4.7.4 | |
11.8 Средства подачи/удаления материалов для работы | НУ | |
11.9 Основное оборудование и принадлежности для регулировки и/или обслуживания средств безопасности | 4.4.4, 4.9.1, перечисление a) F.2.5, перечисление i) F.2.5 | |
11.10 Оборудование для удаления газов и т.д. | 4.3.20 | |
12 Несоответствующий уровень освещенности рабочей зоны и зоны перемещения | НУ | |
13 Опасности, возникающие из-за неожиданного движения/неустойчивости во время управления | 4.2, 4.3.2, 4.3.3, 4.3.6, 4.3.7, 4.3.8, 4.3.9, 4.3.10, 4.3.11, 4.3.13, 4.6.1, 4.6.15, 4.7.3, 4.7.4, 4.7.5, 4.7.9 | |
14 Опасности, возникающие из-за пренебрежения принципами эргономики при вождении/управлении | ||
14.1 Опасности, связанные с недостаточной конструктивной защитой (возможность касания движущихся частей, отвод выхлопных газов и т.д.) | 4.3.20, 4.3.21 | |
14.2 Ограниченный обзор с места водителя/машиниста | 4.3.2, 4.3.22 | |
14.3 Несоответствующая конструкция сиденья и/или его место расположения | НУ | |
14.4 Неэргономичная конструкция расположения органов управления | 4.6.10, 4.7.1, 4.7.2, 4.7.3 | |
14.5 Несовершенная конструкция устройств запуска и включения передвижения подъемника | 4.3.16, 4.3.17, 4.3.18, 4.3.19, 4.3.22, 4.7.1, 4.7.3 | |
14.6 Движение подъемника по дороге | 4.3.15, 4.3.17, 4.3.18 | |
14.7 Перемещение подъемника, управляемого дистанционно | 4.3.18 | |
15 Механические опасности, вызванные функциональными неполадками | ||
15.1 Опасности для находящегося рядом рабочего персонала из-за неуправляемого движения подъемника | 4.2.3, 4.4.4, 4.7.1 | |
15.2 Опасности из-за разлома подъемника или узлов на несколько частей и/или отделения частей | НУ | |
15.3 Опасности из-за опрокидывания подъемника | НУ | |
15.4 Опасности из-за падения предметов | НУ | |
15.5 Несоответствующие способы доступа | 4.6.7, 4.6.8 | |
15.6 Опасности, вызванные сцепкой, соединением, транспортировкой (буксировкой) | НУ | |
15.7 Аккумуляторные батареи, возгорание рабочей жидкости | 4.3.20, 4.3.21, 4.3.23 | |
16 Опасности, возникающие при подъеме | ||
16.1 Недостаточная устойчивость | 4.2, 4.3.2, 4.3.6, 4.3.7, 4.3.8, 4.3.9, 4.4.1 | |
16.2 Сход подъемника с рельсов | 4.3.24 | |
16.3 Потеря механической прочности подъемника и подъемных устройств | 4.2.5, 4.4.1, 4.6.14, перечисление b) 6.2.1, перечисление a) F.2.2, перечисление b) F.2.2 | |
17 Несоответствующая видимость траекторий подвижных частей | 4.3.22 | |
18 Опасности, вызываемые молниями | НУ | |
19 Опасности из-за перегрузки | 4.4.1 | |
20 Опасности при подъеме и перемещении людей | ||
20.1 Механическая прочность | 4.2, 4.5.2, 4.5.3 | |
20.2 Управление нагрузкой | 4.4.1 | |
21 Опасности, вызываемые функционированием органов управления | ||
21.1 Движение рабочей платформы | 4.4, 4.6.1, 4.7.1, 4.7.2, 4.7.3, 4.7.4, 4.7.9 | |
21.2 Безопасное управление перемещением | 4.7.1, 4.7.2, 4.7.3, 4.7.4 | |
21.3 Безопасное управление скоростью | 4.3.1, 4.3.18, 4.3.19, 4.4.5 | |
22 Опасности падения персонала | ||
22.1 Неисправность защитного оборудования | 4.6.2, 4.6.3 | |
22.2 Неисправность люков | 4.6.9 | |
22.3 Нарушение управления наклоном рабочей платформы | 4.6.1 | |
23 Опасности, вызванные падением/опрокидыванием рабочей платформы | ||
23.1 Падение/опрокидывание рабочей платформы | 4.2, 4.3.2, 4.3.3, 4.3.6, 4.3.7, 4.3.8, 4.3.9, 4.3.10, 4.4.1, 4.4.2, 4.6.13, 4.10 | |
23.2 Ускорение/торможение рабочей платформы | 4.3.18, 4.4.5, 4.5.1.6 | |
24 Маркировка | 6.3 | |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА.1
Обозначение ссылочного межгосударственного стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
NEQ | ISO 3864 (все части) "Графические символы. Сигнальные цвета и знаки безопасности" | |
MOD | IEC 60529:2013 "Степени защиты, обеспечиваемые оболочками (код IP)" | |
NEQ | IEC 60068-2-64:2008 "Испытания на воздействие внешних факторов. Часть 2-64. Испытания. Испытания Fh. Широкополосная случайная вибрация (цифровое управление) и руководство" | |
MOD | ISO 20381:2009 "Платформы рабочие подъемные передвижные. Символы для органов управления и других индикаторов" | |
MOD | EN 12158-1:2000+А1:2010 "Подъемники строительные грузовые вертикальные. Общие технические условия" | |
MOD | EN 12158-2:2000+А1:2010 "Подъемники строительные грузовые наклонные. Общие технические условия" | |
MOD | ISO 18878:2013 "Мобильные подъемники с рабочей платформой. Обучение оператора (машиниста)" | |
NEQ | ISO 16368:2010 "Передвижные подъемные рабочие платформы. Конструкция, расчеты, требования безопасности и методы испытания" ISO 16369:2007 "Платформы рабочие подъемные. Платформы для работы на мачтовых опорах" | |
MOD | EN 12159:2012 "Подъемники строительные грузопассажирские с вертикальным перемещением кабины. Общие технические условия" | |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - MOD - модифицированные стандарты; - NEQ - неэквивалентные стандарты. | ||
Приложение ДБ
(справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта ISO 16368:2010
Таблица ДБ.1
Структура настоящего стандарта | Структура международного стандарта ISO 16368:2010 | ||||
Раздел | Подраздел | Пункт | Раздел | Подраздел | Пункт |
1 | 1 | ||||
2 | 2 | ||||
3 | 3.1 | 3 | 3.19 | 3.19.1 | |
3.2 | 3.19.2 | ||||
3.3 | - | 3.19.3 | |||
3.4 | - | 3.19.4 | |||
3.5 | - | 3.19.5 | |||
- | - | 3.19.6 | |||
- | - | 3.19.7 | |||
- | - | 3.19.8 | |||
- | - | 3.19.9 | |||
- | - | 3.19.10 | |||
- | 3.20 | ||||
- | 3.21 | ||||
- | 3.22 | ||||
- | 3.23 | ||||
- | 3.24 | ||||
- | 3.25 | ||||
- | 3.26 | ||||
- | 3.27 | ||||
- | 3.28 | ||||
- | 3.29 | ||||
- | 3.30 | ||||
- | 3.31 | ||||
- | 3.32 | ||||
- | 3.33 | ||||
- | 3.34 | ||||
- | 3.35 | ||||
- | 3.36 | ||||
- | 3.37 | ||||
- | 3.38 | ||||
- | 3.39 | ||||
- | 3.40 | ||||
4 | 4.1 | 4.1.1 | 4 | 4.1 | 4.1.1 |
4.1.2 | 4.1.2 | ||||
4.1.3 | 4.1.3 | ||||
4.2 | 4.2.1 | 4.2 | 4.2.1 | ||
4.2.2 | 4.2.2 | ||||
4.2.3 | 4.2.3 | ||||
4.2.4 | 4.2.4 | ||||
4.2.5 | 4.2.5 | ||||
4.3 | 4.3.1 | 4.3 | 4.3.1 | ||
4.3.2 | 4.3.2 | ||||
4.3.3 | 4.3.3 | ||||
4.3.4 | 4.3.4 | ||||
4.3.5 | 4.3.5 | ||||
4.3.6 | 4.3.6 | ||||
4.3.7 | 4.3.7 | ||||
4.3.8 | 4.3.8 | ||||
4.3.9 | 4.3.9 | ||||
4.3.10 | 4.3.10 | ||||
4.3.11 | 4.3.11 | ||||
4.3.12 | 4.3.12 | ||||
4.3.13 | 4.3.13 | ||||
4.3.14 | 4.3.14 | ||||
4.3.15 | 4.3.15 | ||||
4.3.16 | 4.3.16 | ||||
4.3.17 | 4.3.17 | ||||
4.3.18 | 4.3.18 | ||||
4.3.19 | 4.3.19 | ||||
4.3.20 | 4.3.20 | ||||
4.3.21 | 4.3.21 | ||||
4.3.22 | 4.3.22 | ||||
4.3.23 | 4.3.23 | ||||
4.3.24 | 4.3.24 | ||||
4.3.25 | 4.3.25 | ||||
4.4 | 4.4.1 | 4.4 | 4.4.1 | ||
4.4.2 | 4.4.2 | ||||
4.4.3 | 4.4.3 | ||||
4.4.4 | 4.4.5 | ||||
4.4.6 | 4.4.6 | ||||
4.5 | 4.5.1 | 4.5 | 4.5.1 | ||
4.5.2 | 4.5.2 | ||||
4.5.3 | 4.5.3 | ||||
4.5.4 | 4.5.4 | ||||
4.5.5 | 4.5.5 | ||||
4.6 | 4.6.1 | 4.6 | 4.6.1 | ||
4.6.2 | 4.6.2 | ||||
4.6.3 | 4.6.3 | ||||
4.6.4 | 4.6.4 | ||||
4.6.5 | 4.6.5 | ||||
4.6.7 | 4.6.7 | ||||
4.6.8 | 4.6.8 | ||||
4.6.9 | 4.6.9 | ||||
4.6.10 | 4.6.10 | ||||
4.6.11 | 4.6.11 | ||||
4.6.12 | 4.6.12 | ||||
4.6.13 | 4.6.13 | ||||
4.6.14 | 4.6.14 | ||||
4.6.15 | 4.6.15 | ||||
4.6.16 | 4.6.16 | ||||
4.6.17 | 4.6.17 | ||||
4.7 | 4.7.1 | 4.7 | 4.7.1 | ||
4.7.2 | 4.7.2 | ||||
4.7.3 | 4.7.3 | ||||
4.7.4 | 4.7.4 | ||||
4.7.5 | 4.7.5 | ||||
4.7 | 4.7.6 | 4.7 | 4.7.6 | ||
4.7.7 | 4.7.7 | ||||
4.7.8 | 4.7.8 | ||||
4.7.9 | 4.7.9 | ||||
4.7.10 | 4.7.10 | ||||
4.7.11 | 4.7.11 | ||||
4.8 | 4.8.1 | 4.8 | 4.8.1 | ||
4.8.2 | 4.8.2 | ||||
4.8.3 | 4.8.3 | ||||
4.8.4 | 4.8.4 | ||||
4.8.5 | 4.8.5 | ||||
4.9 | 4.9.1 | 4.9 | 4.9.1 | ||
4.9.2 | 4.9.2 | ||||
4.9.3 | 4.9.3 | ||||
4.9.4 | 4.9.4 | ||||
4.9.5 | 4.9.5 | ||||
4.9.6 | 4.9.6 | ||||
4.9.7 | 4.9.7 | ||||
4.9.8 | 4.9.8 | ||||
4.9.9 | 4.9.9 | ||||
4.9.10 | 4.9.10 | ||||
4.10 | 4.10.1 | 4.10 | 4.10.1 | ||
4.10.2 | 4.10.2 | ||||
4.10.3 | 4.10.3 | ||||
4.11 | 4.11.1 | 4.11 | 4.11.1 | ||
4.11.2 | 4.11.2 | ||||
4.11.3 | 4.11.3 | ||||
4.11.4 | 4.11.4 | ||||
4.11.5 | 4.11.5 | ||||
4.11.6 | 4.11.6 | ||||
5 | 5.1 | 5.1.1 | 5 | 5.1 | 5.1.1 |
5.1.2 | 5.1.2 | ||||
5.1.3 | 5.1.3 | ||||
5.1.4 | 5.1.4 | ||||
5.2 | 5.2 | ||||
5.3 | 5.3.1 | 5.3 | 5.3.1 | ||
5.3.2 | 5.3.2 | ||||
6 | 6.1 | 6 | 6.1 | ||
6.2 | 6.2.2 | 6.2 | 6.2.1 | ||
6.2.5 | 6.2.2 | ||||
6.2.3 | 6.2.3 | ||||
6.3 | 6.3.1 | 6.3 | 6.3.1 | ||
6.3.2 | 6.3.2 | ||||
6.3.3 | 6.3.3 | ||||
6.3.4 | 6.3.4 | ||||
6.3.5 | 6.3.5 | ||||
6.3.6 | 6.3.6 | ||||
6.3.7 | 6.3.7 | ||||
6.3.8 | 6.3.8 | ||||
6.2.7 | 6.3.9 | ||||
6.3.9 | 6.3.10 | ||||
6.3.10, 6.3.12 | 6.3.11 | ||||
6.3.10 | 6.3.12 | ||||
6.3.11 | 6.3.13 | ||||
6.3.13 | 6.3.14 | ||||
6.3.12 | 6.3.15 | ||||
6.3.14 | 6.3.16 | ||||
Приложение А | Приложение А | ||||
Приложение В | Приложение В | ||||
Приложение С | Приложение С | ||||
Приложение D | Приложение D | ||||
Приложение Е | Приложение Е | ||||
Приложение F | Приложение F | ||||
Приложение G | Приложение G | ||||
Приложение H | Приложение H | ||||
Приложение ДА | - | ||||
Приложение ДБ | - | ||||
Библиография
[1] | ИСО 16369 | Платформы рабочие подъемные. Платформы для работы на мачтовых опорах |
[2] | МЭК 61057 | Работа с проводами под напряжением. Изоляционные воздушные устройства для установки на шасси |
[3] | ИСО 16653-2 | Передвижные подъемные рабочие платформы (MEWP). Часть 2. Конструкция, расчет, требования безопасности и методы испытания специальных характеристик. Часть 2. MEWP с непроводящими (изолирующими) компонентами |
[4] | ИСО 18893 | Подъемники мобильные с рабочими платформами. Требования безопасности, техническое освидетельствование, обслуживание и эксплуатация |
[5] | ИСО 4302 | Краны грузоподъемные. Оценка ветровой нагрузки |
[6] | ИСО 4305 | Мобильные краны. Определение устойчивости |
[7] | ТР ТС 018/2011 | Технический регламент Таможенного союза "О безопасности колесных транспортных средств" |
[8] | ИСО 13854 | Безопасность машин. Минимальные зазоры, позволяющие избежать повреждений частей тела человека |
[9] | ИСО 2408:2004 | Стальные тросы общего назначения. Минимальные требования |
[10] | МЭК 60204-1:2010 | Электрооборудование промышленных машин. Безопасность. Часть 1. Общие требования |
[11] | ПУЭ | Правила устройства электроустановок (ПУЭ). 6-е издание (утв. Минэнерго Российской Федерации) |
[12] | МЭК 60947-5-1:2000 | Низковольтные механизмы переключения и управления. Часть 5-1: Приборы цепи управления и элементы переключения. Электрические приборы цепи управления |
[13] | BS 2573-2 | Правила конструирования подъемных кранов. Технические условия для классификации, расчета напряжений и конструирования |
[14] | ИСО 4301-4 | Краны грузоподъемные и связанное с ними оборудование. Классификация. Часть 4. Краны с поворотной стрелой |
[15] | ИСО 4308-2 | Краны и подъемные устройства. Выбор стальных канатов. Часть 2. Краны стреловые самоходные. Коэффициент использования |
[16] | ИСО 8087 | Краны самоходные. Размеры барабанов и блоков |
[17] | ИСО 4309 | Краны грузоподъемные. Проволочные канаты. Уход и техническое обслуживание, инспекция и браковка |
[18] | МЭК 60204-32:2008 | Электрооборудование промышленных машин. Безопасность. Часть 32. Требования к грузоподъемным механизмам |
УДК 001.4:621.876.112:006.354 | МКС 53.020.20 | Г86 | ОКП 48 3700 |
Ключевые слова: мобильный подъемник с рабочей платформой (МПРП), шасси базовое, подъемное оборудование, рабочая платформа, номинальная нагрузка, безопасность, устройство безопасности, устойчивость, выносные опоры, система привода, органы управления, электрооборудование, гидросистема, эксплуатационная документация, испытания | |||
Редакция документа с учетом
изменений и дополнений подготовлена
