ГОСТ 26543-94
Группа Г15
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МОТОР-РЕДУКТОРЫ ПЛАНЕТАРНЫЕ
Основные параметры
Planetary gearmotors.
Basic parameters
ОКС 21.200
ОКП 41 6172
Дата введения 1996-07-01
Предисловие
1 РАЗРАБОТАН Научно-исследовательским и проектно-конструкторским институтом редукторостроения (НИИредуктор) Минмашпрома Украины
ВНЕСЕН Государственным комитетом Украины по стандартизации, метрологии и сертификации
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол N 6-94 от 21 октября 1994 г.)
За принятие проголосовали:
Наименование государства | Наименование национального органа по стандартизации |
Республика Азербайджан | Азгосстандарт |
Республика Армения | Армгосстандарт |
Республика Белоруссия | Белстандарт |
Республика Грузия | Грузстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Киргизская Республика | Киргизстандарт |
Республика Молдова | Молдовастандарт |
Российская Федерация | Госстандарт России |
Республика Узбекистан | Узгосстандарт |
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 10 января 1996 г. N 3 межгосударственный стандарт ГОСТ 26543-94 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 июля 1996 г.
4 ВЗАМЕН ГОСТ 26543-85
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
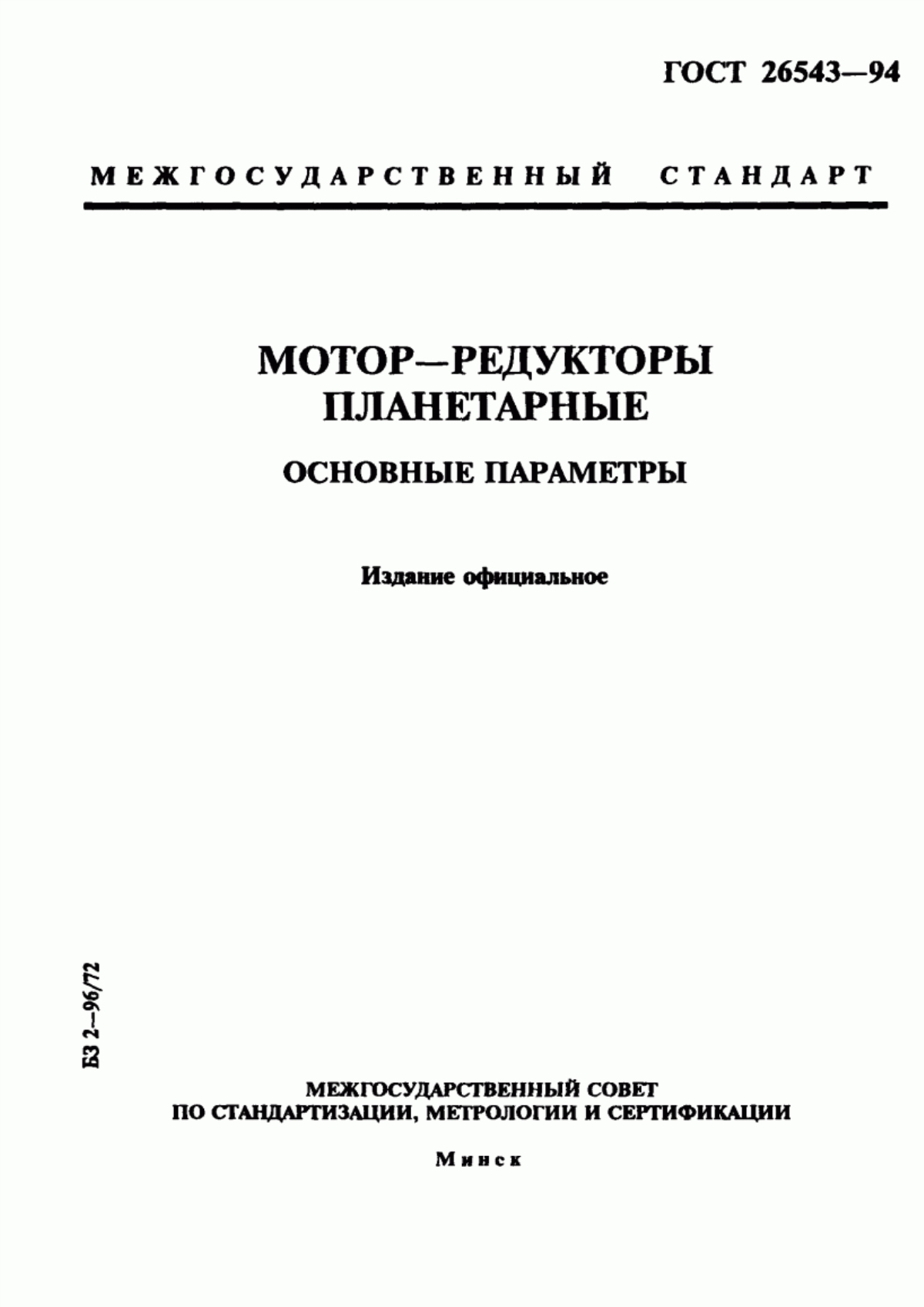
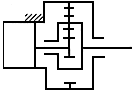
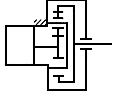
Настоящий стандарт распространяется на мотор-редукторы планетарные зубчатые нормализованные общемашиностроительного применения (далее - мотор-редукторы) с двигателями мощностью от 0,06 до 45,00 кВт и частотой вращения выходного вала от 0,45 до 315,00 об/мин, предназначенные для приводов машин, механизмов и оборудования с одной, двумя или тремя ступенями по кинематическим схемам, приведенным на рисунках 1, 2 и 3.
|
| ||||
Рисунок 1 | Рисунок 2 | ||||
| |||||
Рисунок 3 | |||||
Для мотор-редукторов специального назначения стандарт является рекомендуемым.
Требования настоящего стандарта являются обязательными.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 24266-80 Концы валов редукторов и мотор-редукторов. Основные размеры, допускаемые крутящие моменты*
ГОСТ 24386-91 Механизмы ведущие и ведомые. Высоты осей
ГОСТ 25484-93 Мотор-редукторы зубчатые. Общие технические условия**
_________________
* Действует ГОСТ 24266-94, здесь и далее по тексту.
** На территории Российской Федерации действует ГОСТ Р 50968-96, здесь и далее по тексту. - Примечание "КОДЕКС".
3 ОСНОВНЫЕ ПАРАМЕТРЫ И РАЗМЕРЫ
3.1 В качестве определяющего размера для планетарных мотор-редукторов принимается делительный диаметр центрального колеса с внутренними зубьями или радиус
расположения осей сателлитов (рисунок 4).
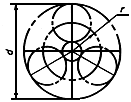
Рисунок 4
3.2 Номинальные размеры делительных диаметров центрального колеса с внутренними зубьями следует выбирать из рядов, приведенных в таблице 1, номинальные размеры радиусов расположения осей сателлитов - из рядов, приведенных в таблице 2.
Таблица 1
В миллиметрах
Ряд 1 | Ряд 2 |
- | 90 |
100 | - |
- | 112 |
125 | - |
- | 140 |
160 | - |
- | 180 |
200 | - |
- | 224 |
250 | - |
- | 280 |
315 | - |
- | 355 |
400 | - |
- | 450 |
500 | - |
- | 560 |
630 | - |
- | 710 |
800 | - |
- | 900 |
1000 | - |
Примечания
1 Значения ряда 1 предпочтительны.
2 Фактические значения делительных диаметров могут отличаться от номинальных на величину, обеспечивающую допускаемые отклонения фактических значений частот вращения выходного вала от номинальных.
Таблица 2
В миллиметрах
Ряд 1 | Ряд 2 |
31,5 | - |
- | 35,5 |
40,0 | - |
- | 45,0 |
50,0 | - |
- | 56,0 |
63,0 | - |
80,0 | 71,0 |
- | - |
100,0 | 90,0 |
- | |
- | 112 |
125 | - |
- | 140 |
160 | - |
- | 180 |
200 | - |
- | 224 |
250 | - |
- | 280 |
315 | - |
- | - |
Примечания
1 Значения ряда 1 предпочтительны.
2 Фактические значения радиусов расположения осей сателлитов могут отличаться от номинальных на величину, обеспечивающую допускаемые отклонения фактических значений частот вращения выходного вала от номинальных.
3.3 Мощности приводных двигателей следует выбирать из ряда 0,06; 0,09; 0,12; 0,18; 0,25; 0,37; 0,55; 0,75; 1,10; 1,50; 2,20; 3,00; 4,00; 5,50; 7,50; 11,00; 15,00; 18,50; 22,00; 30,00; 37,00; 45,00 кВт.
3.4 Номинальные значения частоты вращения выходного вала следует выбирать из рядов, приведенных в таблице 3.
Таблица 3
В об/мин (с)
Ряд 1 | Ряд 2 |
- | 0,45(0,007) |
0,50(0,008) | 0,56(0,009) |
0,63(0,010) | 0,71(0,012) |
0,80(0,013) | 0,90(0,015) |
1,00(0,017) | 1,12(0,019) |
1,25(0,021) | 1,40(0,023) |
1,60(0,027) | 1,80(0,030) |
2,00(0,033) | 2,24(0,037) |
2,50(0,042) | 2,80(0,046) |
3,15(0,052) | 3,55(0,059) |
4,00(0,067) | 4,50(0,750) |
5,00(0,083) | 5,60(0,093) |
6,30(0,105) | 7,10(0,118) |
8,00(0,133) | 9,00(0,150) |
10,00(0,166) | 11,20(0,186) |
12,50(0,208) | 14,00(0,233) |
16,00(0,266) | 18,00(0,300) |
20,00(0,333) | 22,40(0,373) |
25,00(0,416) | 28,00(0,466) |
31,50(0,525) | 35,50(0,591) |
40,00(0,666) | 45,00(0,750) |
50,00(0,833) | 56,00(0,933) |
63,00(1,050) | 71,00(1,183) |
80,00(1,333) | 90,00(1,500) |
100,00(1,666) | 112,00(1,866) |
125,00(2,083) | 140,00(2,333) |
160,00(2,666) | 180,00(3,000) |
200,00(3,333) | 224,00(3,733) |
250,00(4,166) | 280,00(4,666) |
315,00(5,250) | - |
Примечания
1 Значения ряда 1 предпочтительны.
2 Фактические значения частоты вращения выходного вала не должны отличаться от номинальных более чем на 10%.
3 Приведенные в 3.4 и таблице 3 параметры относятся к мотор-редукторам с частотой тока 50 Гц. При частоте тока 60 Гц частота вращения выходного вала увеличивается на 20%.
3.5 Допускаемые значения радиальной консольной нагрузки на выходном валу - по ГОСТ 25484.
3.6 Размеры конца выходного вала - по ГОСТ 24266.
3.7 Номинальные значения и предельные отклонения высот осей - по ГОСТ 24386.
Текст документа сверен по:
М.: ИПК Издательство стандартов, 1996
