ПНСТ 458-2020
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
ВНЕШНИЕ СИСТЕМЫ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОСТИ
Общие требования
Intelligent transport systems. External hazard detection and notification systems. Basic requirements
ОКС 43.040.15
Срок действия с 2021-06-01
до 2024-06-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным бюджетным образовательным учреждением высшего образования "Московский автомобильно-дорожный государственный технический университет (МАДИ)"
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 16 октября 2020 г. N 72-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 18682:2016* "Интеллектуальные транспортные системы. Внешние системы обнаружения и предупреждения об опасности. Общие требования" (ISO 18682:2016 "Intelligent transport systems - External hazard detection and notification systems - Basic requirements", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 127083 Москва, ул.Мишина, д.35 и/или в в* Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Внешние системы обнаружения и предупреждения об опасности распознают состояние автомобиля и окружающую его среду, используя бортовое дистанционное зондирование или совместную работу посредством взаимосвязи между инфраструктурой и автомобилем (И-А) или между автомобилями (А-А), и предупреждают или информируют водителя о внешних опасностях.
В настоящем стандарте рассмотрен ряд функций, таких как медленная индикация автомобиля, предупреждение об опасности столкновения, помощь при смене полосы движения, предупреждение о стоп-сигналах и помощь при пересечении перекрестков, а также приведены общие требования к нескольким внешним системам обнаружения и предупреждения об опасности. Область применения ISO/TC 204 должна содействовать положительному опыту использования систем предупреждения водителя и контроля автомобиля/дорожного движения.
Настоящий стандарт предназначен для определения тех требований, которые основаны на базовых принципах обнаружения внешней опасности и системы предупреждения и являются общими требованиями в аналогичных системах, таких как системы безопасности на передвижных устройствах и системах, перечисленных в ISO/TC 204. Настоящий стандарт будет использоваться при разработке различных систем в будущем. Предполагается, что он обеспечит единообразие и эффективность, а также на его основе будут созданы системы, которые уменьшат вероятность путаницы при возникновении опасных ситуаций.
Для более четкого понимания основных требований, перечисленных в настоящем стандарте, примеры формул представлены как справочные элементы, а примеры опасных ситуаций приведены в качестве справочной информации в приложении А.
1 Область применения
Настоящий стандарт устанавливает основные требования, предъявляемые к системам для направления уведомлений, таких как предупреждение и информационные сообщения, для предоставления информации об опасности водителю.
Требования включают в себя принцип предупреждения, время предупреждения, расстояние предупреждения и информационные элементы, которые должны быть включены в сообщения.
Примечания
1 Методы реализации таких функций, как обнаружение опасных состояний, связь и презентация для водителей, не указаны в настоящем стандарте.
2 Формулы, приведенные в разделе 4, и расчет конкретной продолжительности времени или расстояния, представленные в приложении А, являются не нормативными, а справочными элементами.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 предупреждение об опасности: Информация, которая предоставляется водителю автомобиля для предупреждения о возникновении внешних опасностей.
2.2 предупреждение: Тип предупреждения об опасности (2.1), требующий немедленных действий во избежание внешней опасности.
2.3 информационное сообщение: Тип предупреждения об опасности (2.1), который информирует водителя автомобиля о возникновении внешней потенциальной опасности в ближайшем будущем.
2.4 опасное состояние: Внешние условия, сопряженные с риском возникновения аварий или столкновений.
2.5 безопасное состояние: Состояние автомобиля, которое достигается после избегания опасного состояния (2.4).
3 Внешние системы обнаружения и предупреждения об опасности
3.1 Общие положения
С помощью внешних систем обнаружения и предупреждения об опасности идентифицируют различные опасные ситуации, которые происходят в настоящее время, могут произойти в ближайшее время или потенциально опасные, для того чтобы предупредить водителя, направляя предупреждение и/или сообщение о необходимости быстро изменить направление движения и скорость во избежание попадания в такие ситуации.
3.2 Категории предупреждений об опасности
Предупреждения об опасности подразделяют на две категории в соответствии с ожидаемой реакцией водителя автомобиля (см. 3.2.1, 3.2.2).
3.2.1 Предупреждения
Системы обнаруживают реальную опасность, оценивают необходимость совершения уклоняющего маневра и предупреждают водителя автомобиля для принятия им соответствующих мер. Предполагается, что водитель принимает решение о выполнении маневра в сжатые сроки.
3.2.2 Информационные сообщения
Системы обнаруживают потенциальную опасность и оценивают вероятность ее сохранения, в связи с чем водитель автомобиля должен будет выполнить определенное действие по его предотвращению. Затем система информирует водителя о потенциальной опасности. Предполагается, что водитель подготовится к избеганию потенциальной опасности в максимально сжатые сроки.
3.3 Типы внешних систем обнаружения и предупреждения об опасности
Внешние системы обнаружения и предупреждения об опасности собирают информацию об опасной ситуации, поступающую из различных источников, и оценивают ее характер для информирования водителей посредством направления предупреждения об опасности.
Внешние системы обнаружения и предупреждения об опасности подразделяют на два типа в зависимости оттого, каким образом информация получена (см. 3.3.1, 3.3.2).
3.3.1 Автономные внешние системы обнаружения и предупреждения об опасности (автономного типа)
Автономные внешние системы обнаружения и предупреждения об опасности оценивают ситуацию, используя полученную информацию исключительно на борту автомобиля, и уведомляют водителя о возникшей опасности.
3.3.2 Кооперативные внешние системы обнаружения и предупреждения об опасности (кооперативного типа)
Кооперативные внешние системы обнаружения и предупреждения об опасности оценивают ситуацию, используя полученную информацию от внешних систем, таких как инфраструктура или другие автомобили, через беспроводную связь, и уведомляют водителя о возникшей опасности.
Примечание - Взаимодействующие внешние системы обнаружения и предупреждения об опасности могут также использовать информацию о движении автомобиля, такую как скорость и местоположение автомобиля.
Кооперативный тип включает в себя два типа систем:
а) инфраструктурно-автомобильные кооперативные внешние системы обнаружения и предупреждения об опасности (И-А кооперативного типа), которые проводят оценку ситуации на основе данных своего автомобиля и инфраструктуры и направляют предупреждения водителю о возникшей опасности;
б) автомобиль - автомобиль кооперативные внешние системы обнаружения и предупреждения об опасности (А-А кооперативного типа), которые проводят оценку ситуации на основе данных своего автомобиля и других автомобилей и направляют предупреждения водителю о возникшей опасности.
Примечание - Могут быть системы, которые используют информацию как от инфраструктуры, так и от других автомобилей.
Типы внешних систем обнаружения и предупреждения об опасности, функционирующие в качестве источников информации, представлены в таблице 1.
Таблица 1 - Типы внешних систем обнаружения и предупреждения об опасностях, которые функционируют как источники информации
Прямой источник информации . Тип | Собственный автомобиль | Инфра- структура | Другой автомобиль | |
Автономный тип | X | - | - | |
Кооперативный тип | а) И-А кооперативного типа | X | X | - |
б) А-А кооперативного типа | X | - | X | |
Информация об автомобиле, такая как скорость, ускорение/замедление и местоположение, может быть использована независимо от типа системы. Могут существовать кооперативные системы, которые используют информацию как от инфраструктуры, так и от других автомобилей. | ||||
3.4 Функциональная конфигурация
3.4.1 Основы функциональной конфигурации
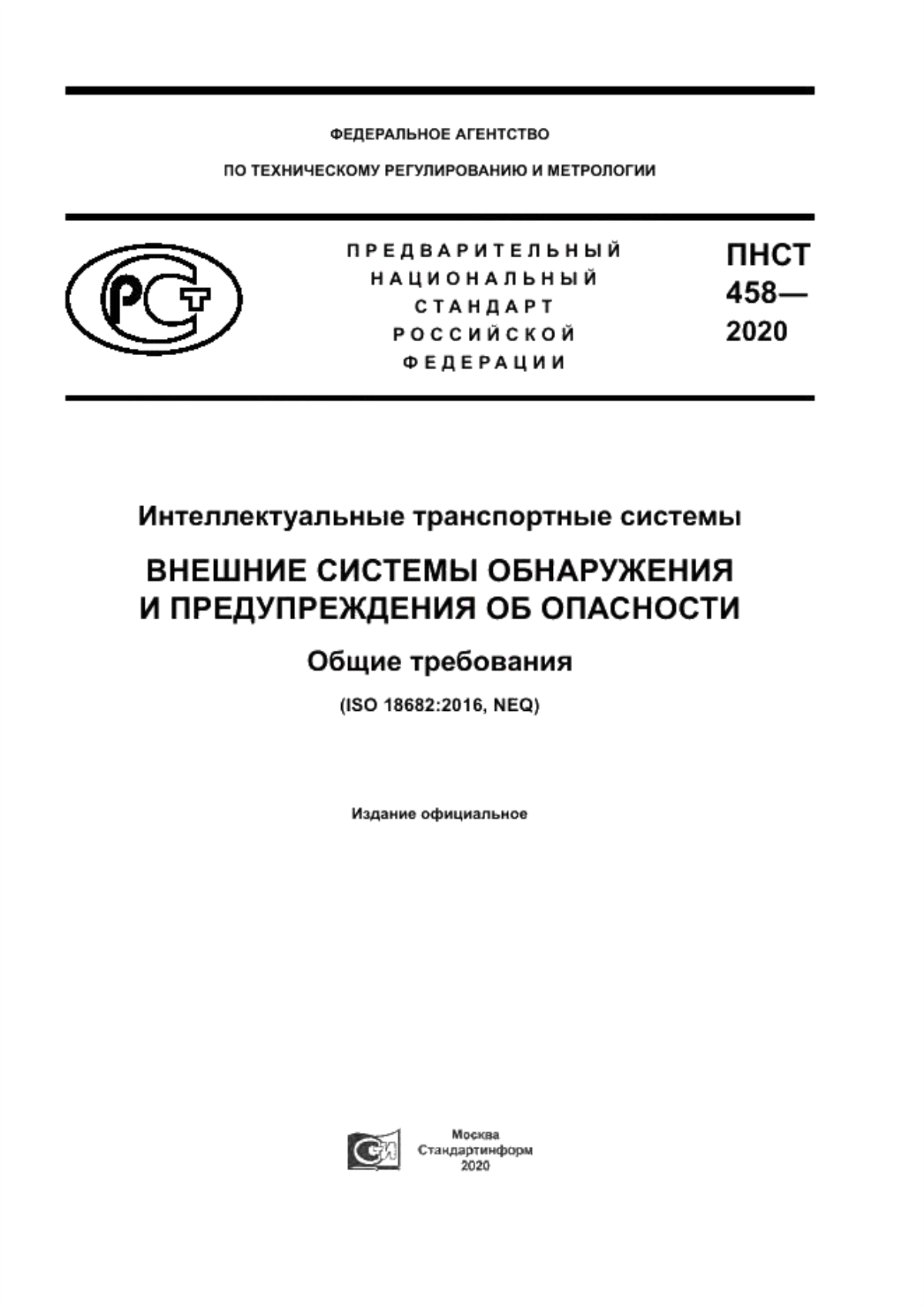
Системы, описанные в настоящем стандарте, включают в себя следующие необходимые функциональные блоки:
а) функциональный блок обнаружения;
б) функциональный блок оценки;
в) функциональный блок интерфейса человек - машина (ИЧМ).
Примечания
1 Место назначается каждой функции и зависит от конструкции системы. Например, уведомление водителя через ИЧМ может быть оценено устройствами в инфраструктуре или в собственном автомобиле. Кроме того, на рынке представлены системы, в которых оценка или решение выполнены инфраструктурными системами, пример такой системы описан в А.2 приложения А.
Когда опасные условия обнаруживаются системами за пределами автомобиля и передаются в автомобиль через беспроводную связь, добавляются функциональные блоки связи.
2 Передача информации между устройствами в одном месте (например, между устройствами внутри автомобиля или между устройствами в инфраструктуре) не входит в этот функциональный блок, но входит в следующие функциональные блоки: обнаружения, оценки или ИЧМ.
Конфигурация абстрактного функционального блока показана на рисунке 1.
 |
Примечание - Место расположения функционального блока связи зависит от конструкции системы.
Рисунок 1 - Конфигурация абстрактного функционального блока
Примеры распределения функций приведены в таблице 2.
Таблица 2 - Пример распределения функций
Тип системы | Инфраструктура | Другой автомобиль | Собственный автомобиль |
Автономный тип | - | - | а) Функциональный блок обнаружения; б) функциональный блок оценки; в) функциональный блок ИЧМ |
И-А кооперативного типа | а) Функциональный блок обнаружения; г) функциональный блок связи (И-А) | - | г) Функциональный блок связи (И-А); б) функциональный блок оценки; в) функциональный блок ИЧМ |
А-А кооперативного типа | - | а) Функциональный блок обнаружения; г) функциональный блок связи (А-А) | г) Функциональный блок связи (А-А); б) функциональный блок оценки; в) функциональный блок ИЧМ |
Эта функция распределения является примером. Каждая функция может быть выделена в других местах. Может быть включена ретрансляция связи через инфраструктуру (от А-И к И-А). | |||
3.4.2 Функциональный блок обнаружения
Функциональный блок обнаружения выявляет возникновение опасных ситуаций с помощью датчиков или накопленных данных и направляет информацию о них в функциональный блок оценки. Причем опасные ситуации не оценивают, а только замеряют по времени наряду с другой информацией. Функциональный блок обнаружения может быть расположен в собственном автомобиле, инфраструктуре или других автомобилях.
Примечания
1 Распределение функций обнаружения или взаимно связанных функций зависит от конструкции системы.
2 В автомобиле и/или инфраструктуре может быть несколько разных функций обнаружения.
3.4.3 Функциональный блок оценки
Функциональный блок оценки обрабатывает информацию, предоставленную функциональным блоком обнаружения, оценивает ее для направления уведомлений об опасности функциональному блоку ИЧМ.
Примечание - Распределение функций для оценки или связанных функций зависит от конструкции системы.
Функциональный блок оценки включает подфункции, такие как:
- подфункция оценки ситуации. Данная подфункция оценивает опасные ситуации, используя различную обнаруженную информацию, предоставляемую функцией обнаружения.
Пример - Оценка возможного столкновения сзади с автомобилем;
- подфункция оценки уведомлений. Данная подфункция оценивает реализацию и содержание уведомлений об опасности на основе подфункции оценки ситуации.
Пример - Определение соответствующего предупреждения: "нажмите на тормоз" или "держите дистанцию".
3.4.4 Функциональный блок интерфейса человек-машина (ИЧМ)
Функциональный блок ИЧМ выдает водителю предупреждения об опасности, используя информацию, предоставленную функциональным блоком оценки.
Примечание - Могут быть два типа устройств, которые имеют ИЧМ: один предназначен исключительно для предупреждения об опасности; другой используется для нескольких типов уведомлений об опасности или для направления другой информации.
Функциональный блок ИЧМ включает следующие подфункции:
- подфункция обработки презентации. Данная подфункция подготавливает информацию, предоставляемую водителю. Если водителю сообщается информация, содержащая большой объем данных, или многозадачная, приоритет каждой части информации оценивается, и уведомление об опасности предоставляется надлежащим образом;
- подфункция презентации. Данная подфункция предоставляет уведомление об опасности водителю автомобиля.
3.4.5 Функциональный блок связи
Функциональный блок связи передает информацию непосредственно в автомобиль из инфраструктуры или других автомобилей через беспроводную связь.
Функциональный блок связи включает в себя подфункцию связи.
3.5 Факторы времени предупреждения об опасности
3.5.1 Общие положения
Факторы времени с момента возникновения или обнаружения опасной ситуации до того момента, когда автомобиль избежал опасности, приведены в таблице 3.
Таблица 3 - Фактор времени
Объект | Фактор времени | ||
Функции внешних систем обнаружения и предупреждения об опасности | Функциональный блок обнаружения | Подфункция обнаружения | Время обнаружения |
Функции внешних систем обнаружения и предупреждения об опасности | Функциональный блок оценки | Подфункция оценки ситуации. Подфункция оценки уведомлений | Время оценки ситуации. Время оценки уведомлений |
Функциональный блок ИЧМ | Подфункция обработки презентации. Подфункция презентации | Время обработки презентации. Время презентации | |
Функциональный блок связи | Подфункции связи | Время связи | |
Дополнительные функции обнаружения внешней опасности и системы предупреждения | Фактор времени после информирования об опасности | Время реакции водителя. Время изменения состояния автомобиля до достижения им безопасного состояния | |
Каждая подфункция может включать определенное время обработки. Время, необходимое для распространения информации между устройствами, должно быть включено во время обработки каждой подфункции. В качестве альтернативы промежуток времени может быть равен нулю в зависимости от расположения подфункций.
3.5.2 Фактор времени функционального блока обнаружения
Фактор времени функционального блока обнаружения - это время, необходимое для обнаружения опасных ситуаций. Обнаружение опасных ситуаций может потребовать измерения времени, а также других измерений и/или обработки другой информации. Опасные ситуации включены в фактор времени функционального блока обнаружения.
Фактор времени функционального блока обнаружения включает в себя время обнаружения.
Пример - Если зона (площадь) или протяженность действия опасной ситуации расширяется или перемещается, расчет опасных условий должен быть произведен после определенного интервала времени.
3.5.3 Фактор времени функционального блока оценки
Фактор времени функционального блока оценки - это время, необходимое для оценки ситуации и выдачи предупреждения об опасности.
Фактор времени функционального блока оценки включает в себя следующие моменты:
- время оценки ситуации - это время, необходимое для оценки ситуации на основе обнаруженной информации;
- время оценки предупреждения - это время, необходимое для оценки функции и содержания предупреждения об опасности на основе оценки ситуации, а именно - необходимость направления предупреждения, какого рода уведомление подходит, предупреждающее или информационное сообщение и т.д.
Примечание - В течение времени оценки ситуации распознается конкретная ситуация, а затем определяется, требуется ли уведомление водителю и если да, то какого типа.
3.5.4 Фактор времени функционального блока интерфейса человек-машина
Фактор времени функционального блока ИЧМ - это время задержки от получения предупреждения до его предоставления водителю.
Фактор времени функционального блока ИЧМ включает в себя следующие моменты:
- время обработки для подготовки информации - это время, необходимое для подготовки информации для предупреждения водителя об опасности, отраженной в решении о приоритете;
- время презентации - это время, необходимое для подачи предупреждения водителю об опасности.
3.5.5 Фактор времени функционального блока связи
Фактор времени функционального блока связи - это время, необходимое для передачи и обработки сообщений, направляемых в автомобиль извне (например, от инфраструктуры или других автомобилей).
Фактор времени функционального блока связи включает в себя время связи.
3.5.6 Фактор времени после предупреждения об опасности
Когда водитель подтверждает уведомление об опасности, он начинает маневрировать автомобилем для того, чтобы избежать опасной ситуации.
Фактор времени после предупреждения об опасности включает следующие моменты:
- время реакции водителя - это время, в течение которого водитель реагирует на уведомление об опасности.
Оно включает в себя время, необходимое водителю:
- чтобы понять содержание предупреждения об опасности;
- чтобы оценить, как избежать опасной ситуации;
- для начала управления транспортным средством.
Примечание - Время реакции водителя и время презентации могут совпадать. Например, в случае предупреждения об опасности, не закончив изучение, водитель может определить, как именно нужно управлять автомобилем;
- время изменения состояния автомобиля до момента достижения безопасного состояния. Время изменения состояния автомобиля - это время, в течение которого водитель маневрирует автомобилем посредством торможения, рулевого управления или другого действия до тех пор, пока он не достиг безопасного состояния.
4 Требования к внешним системам обнаружения и предупреждения об опасности
4.1 Принципы
Предупреждения об опасности, собранные внешними системами обнаружения, и предупреждения об опасности должны быть предоставлены водителю до того, как автомобиль столкнется с опасными ситуациями, что позволит их избежать.
Даже если предупреждения не позволяют водителю полностью избежать опасных ситуаций, они все равно должны быть предоставлены водителю, так как позволят снизить риск возникновения опасных ситуаций.
С учетом вышеизложенного внешние системы обнаружения и предупреждения об опасности следует проектировать с учетом времени для обработки поступающей информации, времени реакции водителя и изменения состояния автомобиля, а также для оказания помощи водителю при возникновении опасных ситуаций.
Эти системы только информируют водителя, вся ответственность за последовательность предпринимаемых действий лежит на водителе.
4.2 Особенности
4.2.1 Общие положения
В этом пункте требования, предъявляемые к информации, времени и расстоянию, выполняются согласно принципам, описанным в 4.1.
4.2.2 Информация об обнаружении
4.2.2.1 Общие положения
Информация об обнаружении опасности предоставляется из функционального блока обнаружения в функциональный блок оценки для оценивания опасных ситуаций, включая информацию об опасных ситуациях, возникающих за пределами собственного автомобиля.
Информация об обнаружении опасности должна содержать информационные элементы, которые позволят водителю сделать следующее заключение в отношении:
а) видов опасных ситуаций;
б) условий опасности;
с) времени до возникновения опасных ситуаций и/или расстояния до места их возникновения.
Примечание - Определение опасных ситуаций в настоящем стандарте не рассмотрено.
4.2.2.2 Виды опасных ситуаций
Следует иметь представление о наличии опасных ситуаций и их видах.
Примеры
1 Типы опасных ситуаций включают препятствия, красный сигнал и наезд сзади.
2 Определенные типы опасных ситуаций могут быть не включены в информацию об обнаружении опасности, например когда автомобиль приближается к неподвижно стоящему автомобилю и водитель вынужден резко затормозить.
4.2.2.3 Изменение состояния опасных ситуаций
Временные и/или пространственные изменения опасных ситуаций следует оценивать, например увеличение/уменьшение, расширение/сужение, исчезновение/появление, уменьшение/увеличение опасности и т.д. Они могут помочь при решении о направлении предупреждения об опасности и о дальнейших действиях водителя автомобиля.
4.2.2.4 Время до встречи с опасными ситуациями и/или расстояние до опасных ситуаций
Время до столкновения с опасными ситуациями и/или расстояние до опасных ситуаций должно отличаться использованием информации обнаружения опасности.
4.2.2.5 Расстояние до опасных ситуаций
Расстояние до опасных ситуаций должно быть оценено.
Методы оценки расстояния до опасных ситуаций могут быть следующими:
- обнаружение по разнице абсолютных значений координат между координатами собственного автомобиля и выявленными опасными ситуациями;
- определение точного расстояния от собственного автомобиля до места опасной ситуации.
4.2.2.6 Время до возникновения опасных ситуаций
Время до места обнаружения опасных ситуаций должно быть оценено.
В этом случае состояние движения (в том числе скорость, ускорение, направление движения и т.д.) автомобиля и состояние опасной ситуации должны быть рассмотрены.
Пример - Если положение предполагаемой опасной ситуации изменяется, то скорость и направление движения должны быть рассчитаны.
4.2.3 Оценка информации
Оценка информации должна включать в себя вопросы, которые должны быть признаны водителем уведомлением об опасности, что может быть выделено из информации большого объема.
При наличии нескольких уведомлений об опасности или другой информации должен быть сохранен приоритет информации для предупреждения в максимально возможной степени.
Примечание - Метод и критерии оценки приоритета могут быть изменены с учетом характеристик автомобиля и/или водителя, окружающей среды и т.д.
Пример - Когда автомобиль подает стоп-сигнал:
- перед автомобилем находится стоящий автомобиль, какое предупреждение наиболее соответствует - красный свет или стоящий автомобиль?
- если автомобиль тормозит, нужно ли предупреждение?
При наличии нескольких опасных ситуаций, происходящих одновременно, наиболее существенным является привлечение внимания водителя с целью его своевременного реагирования. В связи с чем системы должны оценивать опасные ситуации и предоставлять водителю соответствующие предупреждения.
4.2.4 Информация об уведомлении
Информация об уведомлении включает в себя предупреждение и информационное сообщение.
Предупреждение должно побудить водителя немедленно предпринять действия для того, чтобы избежать потенциально опасной ситуации.
Информационное сообщение должно уведомить водителя о потенциальной опасности, если автомобиль находится в опасной ситуации и необходимо предпринять корректирующие действия в краткосрочной перспективе.
В любое уведомление об опасности должна быть включена информация об опасных ситуациях, за исключением тех случаев, когда большой объем информации может повлиять на реакцию водителя.
Примечание - Если при приближении к неподвижно стоящему автомобилю водитель вынужден принять решение об экстренном торможении, детали других опасных условий могут быть не учтены для более четкого реагирования водителя.
Содержание сообщения с предупреждением и информированием и/или срочность предупреждения должны отличаться.
В настоящем стандарте не определен конкретный метод представления и содержания в ИЧМ.
Примечание - Однако проектирование ИЧМ внешних систем обнаружения и предупреждения об опасности должно быть выполнено согласно [1] и [2].
4.2.5 Сроки предупреждения об опасности
4.2.5.1 Общие положения
Уведомление об опасности должно быть получено внешней системой обнаружения и предупреждения об опасности до момента, необходимого с учетом реакции водителя на принятие решения относительно изменения состояния автомобиля во избежание опасной ситуации.
Примечание - Взаимосвязь времени и расстояния до места опасной ситуации для направления предупреждения об опасности см. 4.2.6.
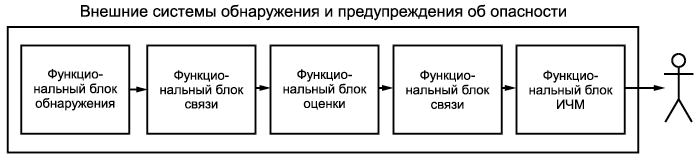
Пример - Время избежания опасности показано на рисунке 2 в случае остановки автомобиля.
Если с момента обнаружения опасных ситуаций до момента их возникновения недостаточно времени, следует уведомить об опасности.
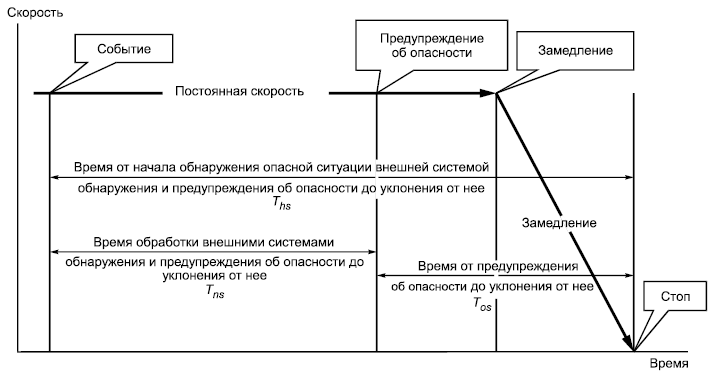 |
Рисунок 2 - Пример времени (в случае остановки автомобиля для того, чтобы избежать опасности)
4.2.5.2 Время, необходимое для обработки
Время обработки от начала обнаружения опасных ситуаций до предоставления предупреждения об опасности включает в себя время, необходимое:
- для обнаружения опасной ситуации внешними системами;
- оценки внешними системами опасной ситуации;
- оценки системами необходимости направления предупреждения об опасности водителю;
- подготовки информации для предупреждения водителя об опасности;
- передачи предупреждения об опасности водителю через ИЧМ;
- обмена коммуникационными сообщениями между функциональными блоками при необходимости.
Примечание - В зависимости от компоновки функций взаимосвязь (например, А-И, А-А, OBU BUS и т.д.) между функциональными блоками может быть необходима.
4.2.5.3 Время, необходимое для предотвращения опасной ситуации
После предупреждения об опасности предотвращение опасной ситуации происходит успешно благодаря своевременной реакции водителя и изменению состояния автомобиля.
Время, необходимое для предотвращения опасности, включает следующее:
- водитель получает уведомление и предпринимает необходимые действия;
- состояние автомобиля меняется на безопасное после предпринятых действий водителя.
Примечания
2 Предупреждение - срочное уведомление об опасности, т.е. таким образом время реакции водителя на опасную ситуацию сокращается, что влияет на время изменения состояния автомобиля при экстренном торможении.
4.2.6 Расстояние до предупреждения об опасности
4.2.6.1 Общие положения
Водитель должен быть уведомлен, находясь на определенном расстоянии от места опасной ситуации, которого должно быть достаточно: для обработки информации, направления и получения предупреждения водителем, изменения состояния автомобиля с учетом реакции водителя.
Примечание - Взаимосвязь времени и расстояния, на котором должно быть отправлено уведомление об опасности, см. 4.2.5.
Если расстояние от места обнаружения опасной ситуации до ее возникновения недостаточно для принятия необходимых мер, следует уведомить об опасности, что позволит уменьшить ее последствия.
4.2.6.2 Расстояние, пройденное во время обработки
Расстояние, пройденное при обработке внешних систем обнаружения и предупреждения об опасности, зависит от скорости автомобиля и времени от обнаружения опасной ситуации до предоставления предупреждения об опасности.
4.2.6.3 Расстояние, необходимое для предотвращения опасной ситуации
Общие положения
После предупреждения об опасности предотвращение опасной ситуации происходит успешно с учетом реакции водителя и изменения движения автомобиля.
До того как водитель предпримет какие-либо действия, движение автомобиля не меняется. После того как действие предпринято, автомобиль переходит в безопасный режим движения с учетом предупреждения об опасности.
Примечание - Безопасное состояние может включать остановку, снижение скорости и смену полосы движения.
Примечание - Предупреждение - это срочное уведомление об опасности. Таким образом, ожидается, что время реакции водителя будет сокращено и состояние автомобиля будет изменено в зависимости от времени экстренного торможения.
Пример расчета расстояния
а) Пример поведения уклонения с использованием торможения (замедление)
После предупреждения об опасности предотвращение опасной ситуации происходит успешно с учетом реакции водителя и изменения состояния автомобиля.
Расстояние после предупреждения об опасности показано на рисунке 3.
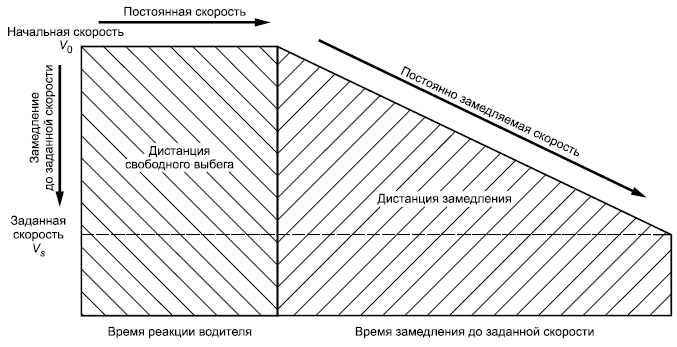 |
Рисунок 3 - Расстояние после предупреждения об опасности (замедление)
б) Пример уклонения с помощью рулевого управления (боковое уклонение)
После предупреждения об опасности предотвращение опасной ситуации становится успешным с учетом реакции водителя и изменения состояния автомобиля.
w - боковое смещение для предотвращения опасной ситуации;
Расстояние после предупреждения об опасности показано на рисунке 4.
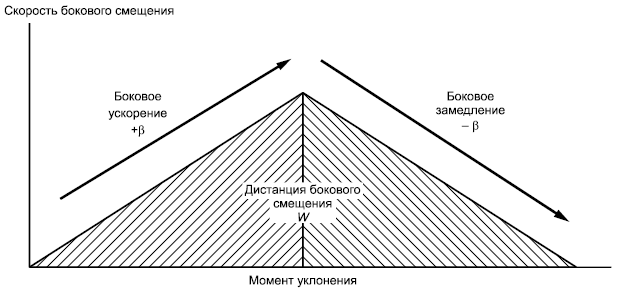 |
Рисунок 4 - Расстояние после предупреждения об опасности (боковое уклонение)
5 Нефункциональные требования
5.1 Общие положения
Требования, не содержащиеся в функциональных требованиях в разделе 4, представлены в разделе 5 как функциональные требования.
5.2 Согласованность
Когда предупреждения об опасности выполняются двумя методами или более в одних и тех же системах, они не должны конфликтовать между собой.
Даже если предупреждения об опасности выполнены разными системами, предпочтительно, чтобы они не вызывали конфликта. Кроме того, необходимо унифицировать термин или выражение сообщения таким образом, чтобы водитель не путал его с другим используемым термином, изображением или звуком.
5.3 Приоритет
Подача множественных уведомлений об опасностях в течение короткого времени должна начинаться с самого опасного. Более того, предупреждения об опасности должны быть простыми для лучшего понимания водителем.
При возникновении в течение короткого времени нескольких различных опасных ситуаций, например время до удара или короткое время до события, критически опасные ситуации должны иметь приоритет.
Примечание - Для определения приоритетности уведомлений об опасности, таких как "IV. Изложение принципов"; "F. Приоритетность множественных предупреждений", следует руководствоваться информацией по [2].
5.4 Безопасность
Безопасность при разработке и внедрении внешних систем обнаружения и предупреждения об опасности должна быть основана на результатах анализа угроз. Кроме того, должны быть приняты соответствующие контрмеры для устранения проблем уязвимости, обнаруженных во время работы систем.
Примечание - Некоторые стандарты, связанные с безопасностью, перечислены в [3]. Методология анализа угроз представлена в [4], дополнительная информация о механизмах для обеспечения безопасности и сохранения конфиденциальности связи в среде ITS показана в [5].
5.5 Качество
Качества информации, такие как точность, четкость и достоверность, следует учитывать при обработке уведомлений об опасности.
Даже если возникают ошибки, предупреждения должны быть безопасно сформулированы в зависимости от качества информации. Более того, при необходимости предпочтительно использовать информацию о качестве для оптимизации уведомлений.
Примечание - В [6] определены данные исследований о достоверности информации, такие как геоданные (например, широта, долгота и высота над уровнем моря), информация об окружающей среде (в частности, температура воздуха) и информация о автомобиле (например, скорость, ускорение, направление, скорость рыскания). Информация о каждом объекте представлена в действительном или целочисленном виде.
Процессы или методы оценки уровня качества могут быть определены индивидуально в других стандартах и/или документах.
5.6 Интеграция
Если несколько уведомлений об опасности интегрированы и предоставляются одномоментно водителю, недоразумения, путаница или конфликты между предупреждениями в процессе их направления должны быть устранены.
Примечание - Для интеграции уведомлений об опасностях необходимо руководствоваться [1].
Приложение А
(справочное)
Рассмотрение сроков и расстояния при предоставлении предупреждения об опасности (тематическое исследование)
А.1 Общие положения
Время и место для направления предупреждения об опасности различаются в зависимости от устройства, связи, количества, способа представления и т.д.
В соответствии с примером рассматриваемых услуг время и точка предупреждения об опасности показаны на рисунке А.1. Иллюстрированные предупреждения об опасности следующие:
- поддержка предотвращения фронтальных столкновений;
- поддержка предотвращения боковых столкновений.
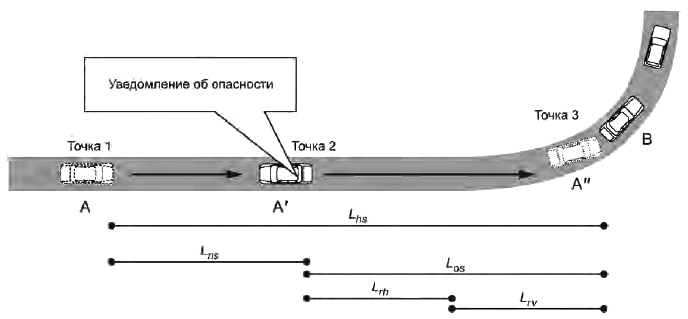
А.2 Поддержка предотвращения фронтальных столкновений (И-А кооперативного типа)
Это услуга, с помощью которой водителю автомобиля выдается уведомление об опасности остановленного впереди автомобиля (см. рисунок А.1):
- когда автомобиль А переходит в точку 1, инфраструктура обнаруживает остановленный впереди автомобиль В;
- инфраструктура решает реализовать уведомление об опасности и передает информацию автомобилю А;
- водителю автомобиля А выдается уведомление об опасности в точке 2;
- водитель тормозит, и автомобиль останавливается в точке 3 без столкновения со стоящим впереди автомобилем.
 |
Примечание - Буквенные обозначения приведены в 4.2.6.
Рисунок А.1 - Поддержка предотвращения столкновений с фронтальными препятствиями
Примеры значений следующие:
- начальная скорость - 80 км/ч;
- конечная скорость - 0 км/ч (остановлена);
- время обнаружения - 0,2 с (включая время оценки);
- время связи - 0,1 с;
- время обработки бортового блока - 1 с;
- время презентации и реакция водителя - 5 с.
Расчетные результаты приведены в таблице А.1.
Таблица А.1 - Поддержка предотвращения столкновений с фронтальными препятствиями
Параметр | Расчетное время, с | Параметр | Расчетное расстояние, м | ||||||||
17,3 | 1,3 | 0,2 | 291 | 68 | 44 | ||||||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| 0,1 |
|
|
|
| 2 | ||
|
|
|
| 1,0 |
|
|
|
| 22 | ||
|
|
|
| 5,0 |
|
|
|
| 110 | ||
|
| 16,0 |
|
|
| 231 |
| ||||
|
|
|
| 11,1 |
|
|
|
| 121 | ||
Примечание - Буквенные обозначения приведены в 4.2.5 и 4.2.6. | |||||||||||
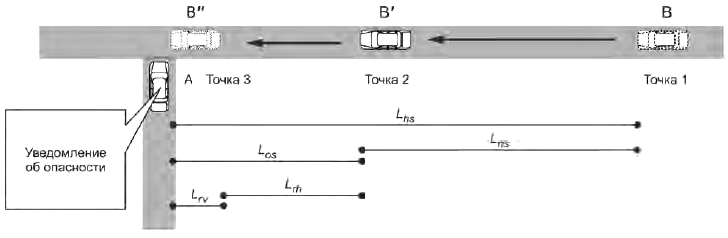
А.3 Поддержка для предотвращения боковых столкновений (А-А кооперативного типа)
Это услуга, при которой водитель автомобиля, остановившегося на перекрестке, направляет уведомление об опасности для приближающегося автомобиля (см. рисунок А.2):
- автомобиль А останавливается недалеко от перекрестка и получает информацию, которая передается от приближающегося автомобиля В в точке 1;
- автомобиль А оценивает уведомление о потенциальной опасности, т.е. если он окажется на перекрестке и столкнется с автомобилем В в точке 3;
- водителю автомобиля А выдается уведомление об опасности, когда автомобиль В находится в точке 2;
- водитель продолжает торможение и останавливается недалеко от перекрестка, избегая тем самым столкновения.
 |
Примечание - Буквенные обозначения показаны в 4.2.6.
Рисунок А.2 - Поддержка предотвращения боковых столкновений автомобилей
Примеры значений следующие:
- начальная скорость - 0 км/ч;
- конечная скорость - 0 км/ч (остановлена);
- скорость приближения автомобиля - 70 км/ч;
- время обнаружения и связи - 0,1 с;
- время оценки - 0,3 с;
- время презентации и время реакции водителя - 0,8 с.
Расчетные результаты приведены в таблице А.2.
Таблица А.2 - Поддержка предотвращения боковых столкновений автомобилей
Предметы | Расчетное время, с | Предметы | Расчетное расстояние, м | ||||||||
1,2 | 0,4 | 0,1 | 24 | 8 | 2 | ||||||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| 0,3 |
|
|
|
| 6 | ||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| 0,8 |
|
|
|
| 16 | ||
|
| 0,8 |
|
|
| 16 |
| ||||
|
|
|
| - |
|
|
|
| - | ||
Примечание - Буквенные обозначения приведены в 4.2.5 и 4.2.6. | |||||||||||
Библиография
[1] | ISO/TR 12204, Road vehicles - Ergonomic aspects of transport information and control systems - Introduction to integrating safety critical and time critical warning signals (Транспорт дорожный. Эргономические аспекты транспортных информационных и управляющих систем. Введение в интеграцию предупреждающих сигналов безопасности и времени) |
[2] | United Nations Economic and Social Council. ECE/TRANS/WP.29/2011/90, Guidelines on establishing requirements for high-priority warning signals (Экономический и Социальный совет ООН. ECE/TRANS/WP.29/2011/90, Руководящие указания по установление* требований к высокоприоритетным предупреждающим сигналам) |
[3] | HTG1-1, Status of ITS Security Standards. EU-US ITS Task Force (Состояние стандартов безопасности ИТС. Целевая группа ЕС-США по ИТС) |
[4] | ETSI/TR 102 893, Intelligent Transport Systems (ITS). Security. Threat, Vulnerability and Risk Analysis (TVRA) [Интеллектуальные транспортные системы (ИТС). Безопасность. Угроза, уязвимость и анализ риска (УУАР)] |
[5] | ETSI/TS 102 731, Intelligent Transport Systems (ITS). Security. Security Services and Architecture [Интеллектуальные транспортные системы (ИТС). Безопасность. Службы безопасности и архитектура] |
[6] | ISO 22837, Vehicle probe data for wide area communications (Данные автомобильного зонда для глобальной связи) |
УДК 629.3.018.7:006.354 | ОКС 43.040.15 | ||
Ключевые слова: интеллектуальные транспортные системы, автомобиль, функциональный блок, интерфейс человек-машина, методы испытаний | |||
