ПНСТ 380-2019
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
УСТРОЙСТВА ПОМОЩИ ПРИ МАНЕВРИРОВАНИИ ЗАДНИМ ХОДОМ
Системы помощи расширенного диапазона при движении задним ходом
Intelligent transport systems. Devices to aid reverse manoeuvres. Extended-range backing aid systems
ОКС 43.040.15
Срок действия с 2020-06-01
до 2023-06-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "ТранснавиСофт" (ООО "ТранснавиСофт")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 декабря 2019 г. N 57-пнст
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 22840:2010* "Интеллектуальные транспортные системы. Устройства помощи при маневрировании задним ходом. Системы помощи расширенного диапазона при движении задним ходом" (ISO 22840:2010 "Intelligent transport systems - Devices to aid reverse manoeuvres - Extended-range backing aid systems (ERBA)", NEQ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 127083, Москва, ул.Мишина, д.35 и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Системы ERBA используют устройства (датчики) для обнаружения объектов и измерения дальности, чтобы предоставить водителю информацию, полученную на основе расстояния до препятствий. Технологии датчиков не рассматриваются, однако они влияют на процедуры эксплуатационных испытаний, описанные в настоящем стандарте. Объекты испытаний определяются с помощью систем, использующих ультразвуковые и радиолокационные датчики, которые на момент публикации настоящего стандарта наиболее часто применяются для обнаружения объектов на больших расстояниях.
Системами ERBA оснащаются ТС малой грузоподъемности [например, легковые автомобили, пикапы, легкие фургоны и спортивный транспорт (исключая мотоциклы)].
1 Область применения
Настоящий стандарт распространяется на системы помощи расширенного диапазона при движении транспортного средства (ТС) задним ходом (ERBA). Настоящий стандарт устанавливает минимальные требования, предъявляемые водителями к функциональности системы, например выявление соответствующих препятствий в определенной зоне обнаружения и информирование о них. Кроме того, настоящий стандарт устанавливает минимальные требования в отношении индикации неисправностей и выполнения процедур эксплуатационных испытаний. Сформулированы правила общей информационной стратегии, при этом не ограничиваются тип информации или система индикации.
Системы ERBA предназначены для оказания помощи при движении задним ходом в расширенной области позади ТС.
Системы ERBA дополняют внутренние и наружные зеркала заднего вида, но не должны заменять такие зеркала. Автоматические действия (например, включение тормозов, чтобы предотвратить столкновение ТС с препятствием) не рассматриваются в настоящем стандарте. Ответственность за безопасную эксплуатацию ТС возлагается на водителя.
Системы ERBA динамически оценивают опасность столкновения (например, используя алгоритм определения времени до столкновения) и предупреждают водителя о необходимости обратить внимание на происходящее, чтобы избежать столкновения с обнаруженным препятствием. Динамическое предупреждение необходимо для более высоких скоростей ТС во время движения задним ходом, когда относительные скорости сближения ТС с препятствием больше, чем на низких скоростях, например при выполнении парковочного маневра. Система динамического предупреждения должна выдавать водителю срочные предупреждения, чтобы водитель имел возможность своевременно предпринять надлежащие меры. Индикация дальности не обязательна (в случае ее использования см. ГОСТ Р ИСО 15008).
Настоящий стандарт не распространяется на средства помощи во время движения задним ходом и на устройства обнаружения препятствий, используемые тяжелыми коммерческими ТС.
Примечание - Требования, предъявляемые к этим системам, сформулированы в [1].
Настоящий стандарт не распространяется на системы улучшения видимости (например, видеокамеры), которые не имеют функций измерения дальности и выдачи предупреждений.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р ИСО 15006 Транспорт дорожный. Эргономические аспекты систем транспортной информации и управления. Технические требования и процедуры обеспечения соответствия для представления звуковой информации внутри транспортного средства
ГОСТ Р ИСО 15008 Транспорт дорожный. Эргономические аспекты систем транспортной информации и управления. Технические требования и процедуры испытаний для представления визуальной информации внутри транспортного средства
ПНСТ 339-2018 Интеллектуальные транспортные системы. Средства маневрирования при движении на низкой скорости. Требования к эксплуатационным характеристикам и методы испытаний
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 система помощи расширенного диапазона при движении задним ходом; система ERBA: Система, способная предупреждать водителя о наличии препятствий позади транспортного средства и необходимости принять немедленные меры.
3.2 активация системы: Процесс переключения системы из режима ожидания в активный режим.
3.3 звуковая информация и предупреждение: Акустическая индикация или сигнал, используемые для передачи водителю информации о препятствиях в зоне обзора.
Примечание - Примеры приведены в приложении А.
3.4 наглядная информация и предупреждение: Оптическая индикация или сигнал, используемые для передачи водителю информации о препятствиях в зоне обзора.
Примечание - Примеры приведены в приложении А.
3.5 тактильная информация и предупреждение: Физиологический раздражитель, используемый для передачи водителю информации о препятствиях в зоне обзора.
Примечание - Примеры приведены в приложении А.
3.6 зона обзора: Определенная область позади транспортного средства, которая отслеживается системой ERBA согласно требованиям настоящего стандарта.
3.7 датчик: Компонент, который обнаруживает препятствия в зоне обзора независимо от используемой технологии.
3.8 объект испытаний: Стандартная испытательная мишень, используемая для проверки системы.
Примечание - Объект испытаний изготавливается из определенного материала и характеризуется заданной геометрией и поверхностью для стандартизованных испытаний с использованием препятствий в зоне обзора системы. Предполагается, что объект испытаний позволяет получить сопоставимые результаты для различных типов датчиков (см. 7.1).
3.9 уровни предупреждения: Интенсивность выдаваемых водителю предупреждений об опасных препятствиях в зоне обзора.
Примечание - Примеры приведены в приложении А.
3.10 скорость сближения: Относительная скорость между транспортным средством и обнаруженным препятствием независимо от их подвижности.
Примечание - Примеры приведены в приложении А.
3.11 индикация дальности: Предоставляемая водителю информация о конкретном расстоянии между транспортным средством и препятствием.
3.12 предупреждение о присутствии: Предоставляемая водителю информация о наличии препятствия в зоне обзора.
Примечание - Такое предупреждение используется с целью оповещения водителя об объектах, находящихся в зоне обзора:
- перед разблокированием тормоза и началом движения транспортного средства;
- когда не превышен порог динамического предупреждения (3.13).
3.13 динамическое предупреждение: Незамедлительное предупреждение водителя о непосредственной угрозе столкновения с препятствием.
Примечание - Примеры приведены в приложении А.
3.14 угол поворота: Угол между прямолинейным положением и текущим положением (направлением) колес относительно продольной оси транспортного средства.
3.15 индикация готовности к работе: Информирование водителя о том, что система ERBA завершила переход из выключенного состояния (или состояния ожидания) во включенное состояние и готова к работе.
Примечание - Разработчик системы может выбрать наглядное и/или звуковое представление этой индикации.
4 Обозначения и сокращения
В настоящем стандарте использованы следующие обозначения и сокращения:
HMI - human-machine interface (человеко-машинный интерфейс);
RCS - radar cross-section (эффективная площадь отражения);
ERBA - Extended-range backing aid systems (система маневрирования задним ходом расширенного диапазона);
ТС - транспортное средство.
5 Функциональные и эксплуатационные требования
ВНИМАНИЕ! Система ERBA, описанная в настоящем стандарте, предназначена для обнаружения типичных объектов на траектории движения ТС задним ходом с целью его защиты от повреждений, за исключением обнаружения пешеходов или животных. Рекомендуется, чтобы справочник владельца ТС (руководство пользователя) содержал раздел рекомендаций, в котором должно быть четко указано это ограничение.
5.1 Угол поворота руля
Системы ERBA должны поддерживать, как минимум, прямолинейное движение ТС при маневрировании задним ходом. Определение азимутальной зоны обзора (3.6) в настоящем стандарте относится к этому случаю использования ERBA (см. рисунок 1).
Системы ERBA могут быть адаптированы к углу поворота, для того чтобы улучшить обнаружение препятствий на криволинейных траекториях движения, однако в настоящем стандарте отсутствуют требования к техническим характеристикам подобного рода систем. Требования настоящего стандарта следует соблюдать во время движения задним ходом при нахождении рулевого управления ТС в нейтральном положении (прямолинейное движение).
5.2 Диапазон обнаружения
Системы ERBA должны обнаруживать цели, расположенные на расстоянии от 1,0 до 5,0 м относительно заднего бампера ТС в области, называемой зоной обзора (см. рисунок 1).
Системы ERBA могут обнаруживать цели на расстоянии менее 1,0 м, однако в настоящем стандарте отсутствуют требования к рабочим характеристикам для этого диапазона.
Примечание - Предполагается, что системы, которые могут обнаруживать цели на расстоянии менее 1,0 м, соответствуют требованиям ПНСТ 339.
5.3 Минимальные технические требования
Минимальные эксплуатационные требования, предъявляемые к ERBA, представлены в таблице 1.
Графа "Диапазон обнаружения" содержит значения "Ближняя зона (максимум)", равные 1,0 м, и "Дальняя зона (минимум)", равные 5,0 м. Такие требования подразумевают, что ERBA обнаруживает объекты, находящиеся на расстоянии не менее 1,0 м от ТС, а также на расстоянии не более 5,0 м относительно ТС. В качестве базовой точки для данного измерения должны быть использованы задний бампер или отделка ТС (см. рисунок 1).
Графа "Скорость сближения" указывает минимальный диапазон скоростей сближения, в пределах которого ERBA должна обнаруживать объекты. Допускается функционирование ERBA для скорости сближения более 3,0 м/с.
Таблица 1 - Эксплуатационные требования
Диапазон обнаружения, м | Скорость сбли- жения, м/с | Задержка обнару- жения, мс | Тип предупреждения | Характеристики обнаружения (при использовании стандартной мишени ИСО) | ||||||||
Ближ- няя зона (макси- мум) | Даль- няя зона (мини- мум) |
| Сред- няя | Макси- мум | Инди- кация даль- ности | Преду- прежде- ние о присут- ствии | Дина- мичес- кое преду- прежде- ние | , % (мини- мум) | , % (мини- мум) | , % (мини- мум) | , % (мини- мум) | , % (мини- мум) |
1,0 | 5,0 | 0,0-3,0 | 150 | 250 | Нео- бяза- тельно | Нео- бяза- тельно | Обяза- тельно | 90 | 60 | 60 | 60 | 10 |
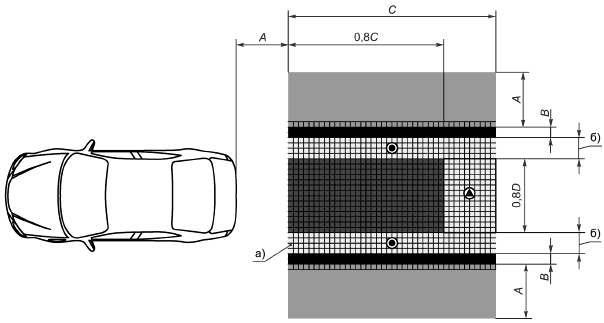 |
_________________
A - 1,0 м; В - 0,25 м; C - диапазон обнаружения; D - ширина бампера
Области обнаружения:
- минимум 90% ; | |
- минимум 60% , ; | |
- максимум 60% ; | |
- максимум 10% ; | |
- условное графическое обозначение ; | |
- условное графическое обозначение |
Рисунок 1 - Азимутальная зона обзора
5.4 Задержка обнаружения
5.4.1 Начальная задержка обнаружения
5.4.1.1 Задержку обнаружения определяют как время отклика ERBA.
Примечание - Если для отображения информации ERBA используют другие системы ТС (например, дисплей навигационной системы), отображение окна запуска в системе индикации рассматривают как индикацию готовности ERBA к работе.
5.4.1.2 Если системы не имеют наглядной или звуковой индикации готовности к работе, время отклика измеряют от момента включения фонарей заднего хода ТС после включения зажигания и до момента выдачи ERBA предупреждения о наличии объекта, находящегося в зоне обзора. Среднее время отклика не должно превышать 450 мс, при этом продолжительность одного измерения - не более 550 мс. Данный промежуток времени учитывает типичные задержки включения передачи заднего хода с целью подавления нежелательного мигания дисплеев при переключении рычага передач (например, из "нейтрального положения" в "парковочное положение" через "задний ход" или из "парковочного положения" в "положение вождения" через "задний ход").
5.4.1.3 Если системы имеют только наглядную индикацию готовности к работе, время отклика измеряется от момента отображения индикации готовности к работе и до момента выдачи ERBA предупреждения о наличии объекта, находящегося в зоне обзора. Среднее время отклика не должно превышать 150 мс, при этом продолжительность одного измерения - не более 250 мс.
5.4.1.4 Если системы имеют только звуковую индикацию готовности к работе, время отклика измеряется от момента завершения подачи звуковой индикации готовности к работе и до момента выдачи ERBA предупреждения о наличии объекта, находящегося в зоне обзора. Среднее время отклика не должно превышать 500 мс. Время отклика может возрастать вследствие паузы между звуковым сигналом готовности к работе и звуковым сигналом предупреждения ERBA.
5.4.1.5 Для систем с наглядной и звуковой индикацией готовности к работе следует применять положения 5.4.1.4.
5.4.2 Задержка индикации и предупреждения
До тех пор пока система активна, временная задержка между обнаружением соответствующего препятствия в зоне обзора и представлением индикации не должна превышать в среднем 150 мс, при этом одно измеренное значение - не более 250 мс.
Задержку обнаружения следует определять в рамках подходящей процедуры испытаний с точностью лучшей, чем одна десятая измеренной временной задержки. При этом задержку обнаружения рассчитывают как среднее арифметическое не менее десяти испытаний.
5.5 Интерфейс водителя и информационная стратегия
5.5.1 Общие сведения о представлении информации
Интерфейс водителя должен обеспечивать представление, как минимум, звуковой информации. Наглядная информация может быть использована в качестве дополнения. Основой для разработки информационных компонентов этих типов должна стать информационная стратегия, благодаря которой эксплуатация различных ТС упрощается и становится безопаснее. Однако конкретную информационную стратегию невозможно указать вследствие следующих причин:
- существует множество различных способов систематизации информации;
- каждому производителю ТС необходима гибкая интеграция средств помощи при движении задним ходом в свою систему информирования водителя для их соответствия всей конструкции ТС.
5.5.2 Звуковая информация
Звуковая информация должна быть предоставлена согласно требованиям ГОСТ Р ИСО 15006.
Для канала звуковой информации рекомендуется соблюдение основных правил, приведенных в перечислениях а)-ж).
а) Индикация дальности, в случае ее использования, может быть представлена в звуковой или наглядной форме. Такая индикация должна кодифицироваться как минимум для двух зон (например, ближней и дальней). Зоны могут быть представлены с различной периодичностью повторения (или, возможно, используя переменную периодичность). В рамках основного правила предполагается, что часто повторяющийся, непрерывный или высокочастотный звуковой сигнал соответствует коротким расстояниям. Применение других или дополнительных правил не должно нарушать основное правило. Возможно также использование синтезированных или записанных голосовых сообщений. В общем случае предупреждение о препятствии должно оставаться активным до тех пор, пока препятствие обнаруживается. Предупреждение о препятствии должно отключаться после прекращения обнаружения. Возможно временное автоматическое отключение звуковой информации по прошествии определенного времени (задается производителем). Однако система должна оставаться в активном состоянии. Звуковой сигнал должен повторно автоматически включиться, как только расстояние до препятствия сократится. В случае увеличения расстояния до препятствия звуковой сигнал может оставаться выключенным.
б) Предупреждения о присутствии могут поступить водителю в звуковой и/или наглядной форме. Они должны кодифицироваться таким образом, чтобы четко уведомлять водителя об объектах в зоне обзора. Допускается сочетать предупреждения о присутствии и индикацию дальности. Возможно также использование синтезированных или записанных голосовых сообщений. В общем случае предупреждение о препятствии должно оставаться активным до тех пор, пока препятствие обнаруживается. Предупреждение о препятствии должно отключаться после прекращения обнаружения. Возможно временное автоматическое отключение звуковой информации по прошествии как минимум 1 с. Однако система должна оставаться в активном состоянии. Звуковой сигнал должен повторно автоматически включиться, как только расстояние до препятствия уменьшится. В случае увеличения расстояния до препятствия звуковой сигнал может оставаться выключенным.
в) Динамические предупреждения должны быть направлены с помощью звуковых сигналов, однако возможно также наглядное представление. Данные предупреждения должны кодифицироваться таким образом, чтобы побудить водителя немедленно сконцентрировать внимание на сообщении. Динамические предупреждения должны уникально соответствовать индикации дальности и предупреждениям о присутствии, а также рекомендовать водителю немедленно принять соответствующие меры. Возможно также использование синтезированных или записанных голосовых сообщений.
г) Индикация включенного/выключенного состояния системы и/или индикация неисправности/сбоя могут быть представлены в звуковой и наглядной форме и должны заметно выделяться среди других сигналов. В общем случае допустимо временное автоматическое отключение индикации состояния по прошествии определенного промежутка времени (которое задается производителем), однако система должна оставаться в активном состоянии.
д) Производитель может предоставить водителю возможность временного ручного отключения звуковых предупреждений. В этом случае звуковые предупреждения должны подавляться до их повторного включения водителем, однако подача звуковых предупреждений должна автоматически восстанавливаться при последующем включении системы (см. 5.6).
е) В настоящем стандарте не указан точный алгоритм использования звукового оповещения для переходов между его состояниями (расстояние, наличие и динамика). Однако согласно общему правилу переходы должны обеспечивать плавные и интуитивно-понятные изменения звуковых состояний. Необходим гистерезис, для того чтобы уменьшить "мерцание" (колебания) при переходе между предупреждениями различных типов. Это особенно важно для динамических предупреждений.
ж) Необходимо предусмотреть специальный режим диагностики для целей проверки на соответствие в тех ситуациях, когда предупреждения о присутствии не выдаются в диапазоне 5 м или имеют длительность менее 3 с. В режиме диагностики система должна направлять предупреждения о присутствии в диапазоне 5 м на протяжении не менее 3 с (непрерывно). Предполагается, что этот режим доступен только техническому специалисту, когда необходимо подтвердить соответствие системы требованиям, предъявляемым к обнаружению и указанным в настоящем стандарте. Водитель ТС не должен иметь доступа к специальному режиму диагностики. Конкретные требования к переходу в этот режим или выходу из него не формулируются и не подразумеваются.
5.5.3 Наглядная информация
Наглядная информация должна представляться согласно требованиям ГОСТ Р ИСО 15008.
Для канала наглядной информации рекомендуется соблюдение основных правил, приведенных в перечислениях а)-в).
а) Наглядная информация должна кодифицироваться как минимум двумя уровнями, обозначаемыми несколькими цветами: например, красный для уровня 1 (уровень неминуемого столкновения) и желтый или зеленый для уровня 2 (уровень внимания). Применение других или дополнительных уровней информирования не должно нарушать основное правило. Два уровня могут быть подразделены с помощью нескольких элементов изображения, имеющих одинаковый цвет, например гистограмма с тремя красными и тремя желтыми или зелеными полосами, благодаря чему возможно использование шести подуровней. Если вместо нескольких цветов использован один цвет, два уровня могут быть представлены комбинацией непрерывного и мигающего отображения или посредством изображения, состоящего из полосок последовательно увеличивающейся длины.
б) Дисплей должен быть расположен таким образом, чтобы минимизировать вероятность изменения водителем направления наблюдения. Например, рекомендуется размещать дисплей в задней части салона, так как это позволяет водителям смотреть на дисплей, одновременно ведя наблюдения с помощью зеркала заднего вида или непосредственно через заднее стекло.
в) Для индикации активации/деактивации и неисправности системы рекомендуется использовать сигнальную лампочку или другой значок, отображаемый на всех активных дисплеях системы.
Примечание - Дополнительные сведения о рекомендованных условных знаках приведены в [2].
5.5.4 Комбинация наглядной и звуковой информации
Для улучшения интерфейса водителя или уменьшения вероятности раздражения водителя и пассажиров может быть использована комбинация наглядной и звуковой информации с учетом конкретных преимуществ обоих типов информации.
Если интенсивность представления звуковой информации может быть снижена водителем (например, посредством меню бортовой системы HMI), руководство пользователя или сообщение диалогового окна системы HMI должно содержать информацию о том, что предупреждения могут не восприниматься своевременно при слишком низком уровне громкости.
Визуальные предупреждения должны продолжать отображаться при отключении звуковых предупреждений. Такая мера помогает напомнить водителю о присутствии объектов в зоне обзора.
5.6 Активация системы
Система ERBA активируется (включается) автоматически сразу после выбора передачи заднего хода. Разработчикам разрешается предусмотреть дополнительные способы активации (например, ручной двухпозиционный переключатель или активация по измеренной скорости вращения колес). Кроме того, допустима работа после переключения на нейтральную передачу при движении ТС назад.
5.7 Деактивация системы
Система ERBA может деактивироваться в соответствии с предпочтениями проектировщика. В настоящем стандарте отсутствуют конкретные требования, предъявляемые к деактивации ERBA.
5.8 Работа при наличии прицепов
5.8.1 Учет сцепного устройства
Сцепное устройство, прикрепленное к ТС, способно повлиять на правильное функционирование системы ERBA, а также может расширить заднюю границу ТС.
Необходимо позаботиться (особенно в случае использования съемного сцепного устройства) о том, чтобы установленное сцепное устройство не ухудшало охват заднего диапазона отслеживания. Требуется учитывать то обстоятельство, что сцепное устройство скорее всего выступает за бампер и, таким образом, определяет границу ТС.
Если надлежащее функционирование с установленным сцепным устройством невозможно осуществить, система должна автоматически выключиться при установке сцепного устройства или необходимо воспользоваться выключателем ручного отключения. Руководство пользователя ТС должно содержать описание соответствующих процедур для подобных случаев.
5.8.2 Работа системы при наличии прицепов
Для систем без ручного выключателя необходимо спроектировать электрическую сеть ТС таким образом, чтобы ERBA автоматически деактивировалась непосредственно после включения электрического соединения между ТС и прицепом. Однако если прицеп оснащен совместимыми датчиками, то они должны информировать водителя о препятствиях во время движения задним ходом.
5.9 Требования, предъявляемые к обнаружению присутствия
5.9.1 Описание азимутальной зоны обзора (присутствие)
Азимутальная область соответствия представляет собой двухмерную проекцию зоны обзора на проезжую часть (см. рисунок 1).
Данная азимутальная область состоит из восьми зон меньшего размера, представленных в перечислениях а)-д).
5.9.2 Требования, предъявляемые к азимутальному обнаружению (присутствие)
Во время проведения испытаний согласно процедуре, указанной в 7.4.2, с использованием объекта испытаний, необходимо подтвердить соответствие ERBA следующим требованиям азимутального обнаружения присутствия:
Пример - Общая площадь наблюдаемой области предположительно имеет 480 элементов, при этом система обнаружила только 445 элементов. Коэффициент обнаружения составляет 445/480=93%.
Примечание - Округление до ближайшего целого процента;
5.9.3 Описание высотной зоны обзора (присутствие)
5.9.4 Требования, предъявляемые к высотному обнаружению (присутствие)
Во время проведения испытаний согласно процедуре, указанной в 7.4.3, с использованием объекта испытаний необходимо подтвердить соответствие ERBA следующему требованию высотного обнаружения присутствия:
- как минимум два элемента в графах с A-O и не менее одной ячейки в графах P-T (см. рисунок 2).
Размеры в метрах
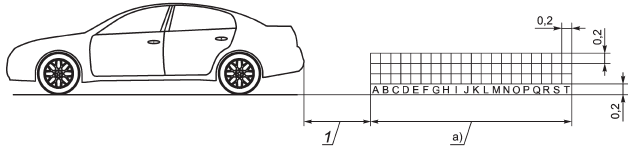 |
_________________
1 - расстояние от сетки до края заднего бампера транспортного средства
Требование к обнаружению | Графа | |||||||||||||||||||
| A | В | C | D | Е | F | G | Н | I | J | K | L | М | N | О | P | Q | R | S | T |
Минимальное количество обнаруженных элементов | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 1 | 1 | 1 | 1 | 1 |
Рисунок 2 - Высотная зона обзора
5.10 Требования к динамическому обнаружению
5.10.1 Описание азимутальной зоны обзора (динамическое обнаружение)
Описание динамической азимутальной зоны обзора совпадает с описанием азимутальной зоны обзора (см. 5.9.1).
5.10.2 Требования, предъявляемые к азимутальному предупреждению (динамическое предупреждение)
Во время проведения испытаний согласно процедуре, указанной в 7.5.2, с использованием объекта испытаний необходимо подтвердить соответствие ERBA требованию азимутального динамического предупреждения, которое должно быть выдано системой.
5.10.3 Описание высотной зоны обзора (динамическое обнаружение)
Описание динамической высотной зоны обзора совпадает с описанием высотной зоны обзора (см. 5.9.3).
5.10.4 Требования, предъявляемые к высотному обнаружению (динамическое предупреждение)
Во время проведения испытаний согласно процедуре, указанной в 7.5.3, с использованием объекта испытаний необходимо подтвердить соответствие ERBA следующему требованию высотного динамического обнаружения:
- система направляет предупреждение по крайней мере для двух из трех рядов.
5.11 Возможности самодиагностики и индикация неисправностей
Система должна обладать следующими функциями самодиагностики, выполняемой, как минимум, при каждом ее включении:
а) система должна проверить работу ее электронных компонентов;
б) система должна проверить датчики на наличие повреждений, способных привести к ее неисправности.
Процедуры, приведенные в перечислениях а) и б), должны:
- выполняться автоматически с целью обнаружения неисправностей, приводящих к сбою в работе системы;
- инициировать генерирование предупреждающего сигнала при обнаружении неисправности.
6 Требования и испытания для компонентов
Компоненты системы должны быть спроектированы с учетом определенных требований, предъявляемых к ТС. Такие компоненты следует проверять в рамках стандартизованных испытаний, указанных производителем ТС. Вместо процедур испытаний, установленных производителем ТС, можно использовать описание испытаний компонентов (см. [3]).
7 Требования к испытаниям
7.1 Объекты испытаний
7.1.1 Определение стандартного объекта испытаний
Подраздел 7.1 содержит требования, предъявляемые к стандартным объектам испытаний, используемым во время проверки возможности системы обнаруживать препятствия.
Необходимо проанализировать и оценить такую ситуацию, при которой определенные технологии датчиков требуют применения другого стандарта. Для ультразвуковых систем выбрана пластмассовая труба, так как она доступна для приобретения, коммерчески выгодна, удобна при транспортировании и замене в случае потери или повреждения. Металлическую трубу используют для радиолокационных систем по аналогичным причинам. Кроме того, металлическая труба в отличие от пластмассовой трубы обеспечивает характерную постоянную эффективную площадь отражения (RCS) в широком диапазоне частот радара.
Необходимо отметить, что характеристики отражения сигналов от этих объектов испытаний определены особенностями датчиков. Данная ситуация характерна для любого выбранного объекта. Объект испытаний должен оставаться неизменным и воспроизводить характеристики определенных ожидаемых препятствий, существующих в реальном мире (например, круглый деревянный, металлический или железобетонный столб).
Геометрические, отражательные и поглощающие характеристики объекта испытаний должны способствовать объективному проведению испытаний и достоверно имитировать реальное препятствие. Универсальные препятствия не должны быть пригодными для применения только одного из многочисленных физических принципов работы датчиков. Такие препятствия должны адекватно воспроизводить основные объекты, которые могут быть реальной помехой при маневрировании. Для проверки горизонтального и вертикального обнаружения используют один и тот же объект испытаний. Стандартизация объектов испытаний способствует проектированию и изготовлению систем с сопоставимыми характеристиками разными поставщиками с целью предоставления водителю минимально ожидаемой функциональности.
7.1.2 Ультразвуковые системы
Проведены измерения коэффициента отражения ультразвуковых волн от соответствующих объектов. Эксперименты показали, что отражение ультразвуковых волн от различных материалов не имеет существенных отличий, если поверхность гладкая и "твердая" для ультразвука. Например, металлические и деревянные столбы характеризуются таким же коэффициентом отражения ультразвука, как и пластмассовые столбы одинакового диаметра. Необходимо учитывать, что для использования в качестве объекта испытаний металлические столбы должны быть более жесткими и должны быть изготовлены на основе строгих размерных допусков. В таблице 2 приведены характеристики объектов испытаний для ультразвуковых систем.
Таблица 2 - Характеристики объекта испытаний для ультразвуковых систем
Зона обзора | Материал | Диаметр, мм | Длина | |
Азимут | , , , | Древесина, металл или жесткая пластмасса | 75 | м |
Древесина, металл или жесткая пластмасса | 150 | м | ||
Высота | Древесина, металл или жесткая пластмасса | 75 | Длина равна ширине бампера испытуемого транспортного средства плюс 20%-40% | |
Столб помещают вертикально в испытательное положение по азимуту. Для проверки высотной зоны обзора столб подвешивают горизонтально (параллельно земле и заднему бамперу ТС).
7.1.3 Радиолокационные системы
Проведены измерения коэффициента отражения радиоволн радара от соответствующих объектов. Результаты этого испытания свидетельствуют о том, что для имитации реальных объектов, обнаруживаемых системами с использованием радиолокационных датчиков, пригодны цилиндрические объекты. В таблице 3 приведены характеристики объектов испытаний для радиолокационных систем.
Столб помещают вертикально в испытательное положение по азимуту. Для проверки высотной зоны обзора столб подвешивают горизонтально (параллельно земле и заднему бамперу ТС).
Таблица 3 - Характеристики объекта испытаний для радиолокационных систем
Зона обзора | Материал | Диаметр, мм | Длина | |
Азимут | , , , | Металл | 25 | м |
Металл | 50 | м | ||
Высота | Металл | 25 | Длина равна ширине бампера испытуемого транспортного средства плюс 20%-40% | |
7.2 Условия окружающей среды (общие положения)
Во время испытаний скорость ветра не должна превышать 5,4 м/с (сила ветра 3). Температура должна находиться в диапазоне от 5°C до 30°C, при этом осадки отсутствуют (например, дождь, снег с дождем, снег и т.д.). Испытания следует проводить на ровной, сухой поверхности. Стены, вспомогательное испытательное оборудование и прочие посторонние объекты должны отсутствовать в области проведения испытаний для исключения помех, обусловленных отраженными сигналами (ультразвуковыми и/или электромагнитными).
7.3 Время отклика при обнаружении объекта
Точный метод измерения задержки обнаружения (см. таблицу 1) не указан в настоящем стандарте, однако процедура испытаний и оборудование для испытаний должны обеспечивать измерение задержки системы с точностью 0,01 с. Рекомендуется предусмотреть задержку не менее 1,5 с перед проведением этого испытания после включения зажигания и подачи напряжения на силовые системы и электронные блоки управления (ECU).
7.4 Требования к испытаниям (предупреждение о присутствии)
7.4.1 Общие положения
В пункте 7.4.2 представлены общие требования, которые следует соблюдать при определении того, в какой степени система соответствует функциональным требованиям настоящего стандарта. Производитель обязан разработать подробную процедуру испытаний.
Эксплуатационные испытания проводят с использованием реального ТС или специальной конструкции для испытаний, которая имитирует установку устройства на реальное ТС. Транспортное средство, используемое для проведения испытаний, должно иметь нормальный собственный вес (допустимое отклонение - ±5%). Высота дорожного просвета должна соответствовать нормальным дорожным условиям при движении по асфальтированным дорогам.
7.4.2 Азимутальная зона обзора (предупреждение о присутствии)
Процедуру выполняют следующим образом:
- наносят разметочную сетку (см. рисунок 1);
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- если для обнаружения препятствий во всей зоне обзора на расстоянии 5 м или для выдачи предупреждений длительностью не менее 3 с испытуемая система должна находиться в режиме диагностики, то данную систему необходимо переключить в этот режим;
- объект испытаний помещают перпендикулярно поверхности земли по центру квадрата сетки в азимутальной зоне обзора;
- после включения испытуемой системы фиксируют обнаружение/необнаружение объекта испытаний. При обнаружении объект испытаний должен быть четко установлен с непрерывным оповещением на протяжении не менее 3 с;
- данную процедуру повторяют для всех квадратов сетки.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
7.4.3 Высотная зона обзора (предупреждение о присутствии)
Высотное испытание следует проводить после определения азимутальных характеристик.
Процедуру выполняют следующим образом:
- наносят разметочную сетку (см. рисунок 2);
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- если для обнаружения препятствий во всей зоне обзора на расстоянии 5 м или для выдачи предупреждений длительностью не менее 3 с испытуемая система должна находиться в режиме диагностики, то данную систему необходимо переключить в этот режим;
- объект испытаний помещают параллельно поверхности земли по центру квадрата сетки и параллельно испытуемому ТС;
- после включения испытуемой системы фиксируют обнаружение/необнаружение объекта испытаний. При обнаружении объект испытаний должен быть четко установлен с непрерывным оповещением на протяжении не менее 3 с;
- данную процедуру повторяют для всех квадратов сетки.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
7.5 Требования к испытаниям (динамическое предупреждение)
7.5.1 Общие положения
При определении того, в какой степени система соответствует функциональным требованиям настоящего стандарта, следует соблюдать следующие общие требования:
- эксплуатационные испытания проводят с использованием реального ТС или специальной конструкции для испытаний, которая имитирует установку устройства на реальное ТС. Транспортное средство, используемое для проведения испытаний, должно иметь нормальный собственный вес (допустимое отклонение - ±5%). Высота дорожного просвета должна соответствовать нормальным дорожным условиям при движении по асфальтированным дорогам;
- на этапе проектирования всех крепежных приспособлений объекта испытаний необходимо учитывать, что во время эксплуатационных испытаний должен обнаруживаться исключительно объект испытаний;
- производитель обязан разработать подробную процедуру испытаний.
7.5.2 Азимутальная зона обзора (динамическое предупреждение)
Процедуру проводят следующим образом:
- наносят разметочную сетку (см. рисунок 1);
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- после включения испытуемой системы необходимо провести испытание и задокументировать, было ли выдано динамическое предупреждение, которое должно быть однозначным;
- данную процедуру повторяют для каждого местоположения, представленного на рисунке 3;
- на завершающем этапе измеряют и документируют задержки обнаружения с помощью испытуемой системы в рамках соответствующей процедуры испытаний, которая приведена в приложении A ПНСТ 339-2018.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
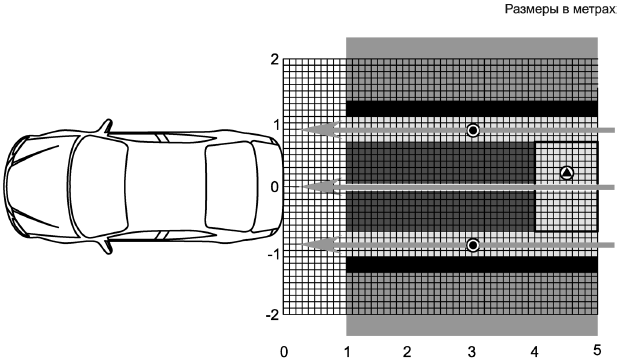 |
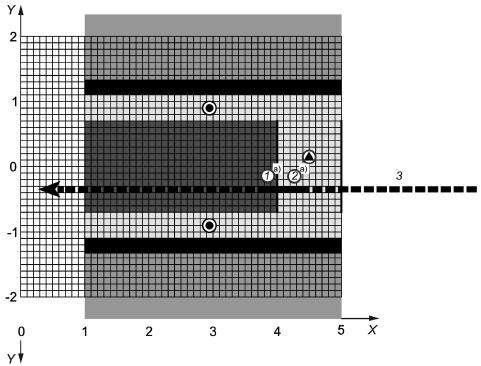
Области обнаружения:
- минимум 90% ; | |
- минимум 60% , ; | |
- максимум 60% ; | |
- максимум 10% ; | |
- условное графическое обозначение ; | |
- условное графическое обозначение |
Рисунок 3 - Азимутальная зона обзора (проверка динамического предупреждения)
Параметры азимутальной зоны обзора для проверки динамического предупреждения перечислены в таблице 4.
Таблица 4 - Азимутальная зона обзора (проверка динамического предупреждения)
Зона обзора | Местоположение | Скорость, м/с |
Правая зона | Любое место в правой зоне | 3,0±0,3 |
, | Осевая линия транспортного средства | 3,0±0,3 |
Левая зона | Любое место в левой зоне | 3,0±0,3 |
7.5.3 Высотная зона обзора (динамическое предупреждение)
Процедуру проводят следующим образом:
- наносят разметочную сетку (см. рисунок 4);
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- испытание следует проводить путем позиционирования объекта испытаний в зоне обзора в каждом из положений, представленных на рисунке 4. Испытатель должен обеспечить возможность перемещения объекта испытаний только внутри каждого последовательного ряда без смещения в другой ряд во время испытания;
- после включения испытуемой системы необходимо провести испытание и задокументировать, было ли выдано динамическое предупреждение, которое должно быть однозначным;
- данную процедуру повторяют для каждого ряда.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
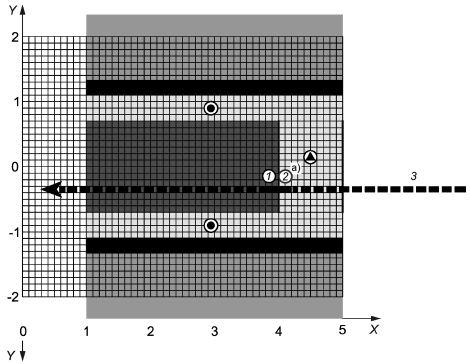
 |
Рисунок 4 - Высотная зона обзора (проверка динамического предупреждения)
Параметры высотной зоны обзора для проверки динамического предупреждения приведены в таблице 5.
Таблица 5 - Высотная зона обзора (проверка динамического предупреждения)
Зона обзора | Местоположение | Скорость, м/с |
Высота | Ряд 1 | 3,0±0,3 |
Высота | Ряд 2 | 3,0±0,3 |
Высота | Ряд 3 | 3,0±0,3 |
7.6 Критерии приемлемости обнаружения (предупреждение о присутствии)
7.6.1 Азимутальная зона обзора (предупреждение о присутствии)
Количество квадратов сетки, имеющих положительные обнаружения в каждой зоне, суммируют и делят на общее количество квадратов сетки, находящихся в соответствующей зоне. Подразумевается, что общее количество квадратов сетки в конкретной зоне меняется в зависимости от ширины бампера испытуемого ТС.
Критерии успешной приемки (т.е. "прохождение испытания") сформулированы следующим образом:
- для каждой зоны должен быть достигнут процент обнаружения, указанный в 5.9.2;
Термином "смежные квадраты сетки" обозначены элементы сетки, расположенные на прямой линии горизонтально, вертикально или диагонально.
7.6.2 Высотная зона обзора (предупреждение о присутствии)
Критерий успешной приемки (т.е. "прохождение испытания") подразумевает достижение необходимого количества обнаруженных квадратов в каждой графе согласно 5.9.4.
 |
_________________
Области обнаружения:
- минимум 90% ; | |
- минимум 60% , ; | |
- максимум 60% ; | |
- максимум 10% ; | |
- условное графическое обозначение ; | |
- условное графическое обозначение |
Рисунок 5 - Нарушение критерия предельного количества смежных пустых квадратов сетки вдоль траектории сближения
 |
_________________
Области обнаружения:
- минимум 90% ; | |
- минимум 60% , ; | |
- максимум 60% ; | |
- максимум 10% ; | |
- условное графическое обозначение ; | |
- условное графическое обозначение |
Рисунок 6 - Нарушение критерия устранено
7.7 Критерии приемлемости обнаружения (динамическое предупреждение)
7.7.1 Азимутальная зона обзора (динамическое предупреждение)
Критерий успешной приемки (т.е. "прохождение испытания") подразумевает выдачу системой предупреждений согласно 5.10.2.
7.7.2 Высотная зона обзора (динамическое предупреждение)
Критерий успешной приемки (т.е. "прохождение испытания") подразумевает выдачу системой предупреждений согласно 5.10.4.
Приложение А
(обязательное)
Примеры работы системы
A.1 Примеры определений
A.1.1 Звуковая информация и предупреждение
Примерами устройств звукового информирования и предупреждения могут служить пьезоэлектрические зуммеры и электромагнитные преобразователи. Как правило, звуковые предупреждения различаются по частоте, периодичности повторения и положению звукового генератора (звукового источника).
A.1.2 Наглядная информация и предупреждение
Примерами устройств наглядного информирования и предупреждения могут служить сигнальные лампочки и светодиодные дисплеи. Визуальные предупреждения, как правило, различаются по цвету, периодичности повторения, условным знакам, световому излучению или тексту.
A.1.3 Тактильная информация и предупреждение
Примерами устройств тактильного информирования и предупреждения могут служить вибрирующие сиденья и пульсирующие педали тормоза. Как правило, тактильные сигналы различаются по интенсивности, частоте вибрации, размеру или месту воздействия (например, руки или ноги водителя).
A.1.4 Уровни предупреждения
Примерами уровней предупреждения могут служить переменный уровень громкости (от низкого до высокого) и интенсивность вибрации (от слабой до сильной). Как правило, уровни предупреждений различаются по частоте, интенсивности, громкости, периодичности повторения и цвету.
A.1.5 Скорость сближения
Скорость сближения зависит от относительного движения двух ТС, при котором возможны следующие варианты:
- скорость сближения ТС, движущегося со скоростью 2 м/с в направлении неподвижного препятствия, равна 2 м/с;
- скорость сближения ТС, движущегося со скоростью 1 м/с в направлении движущегося препятствия, перемещающегося со скоростью 2 м/с по направлению к ТС, равна 3 м/с;
- скорость сближения ТС, движущегося со скоростью 2 м/с в направлении движущегося препятствия, перемещающегося со скоростью 1 м/с в одном направлении с ТС, равна 1 м/с.
A.1.6 Динамическое предупреждение
Динамическое предупреждение должно быть выдано таким образом, чтобы водитель немедленно обратил внимание на предупреждение. Предупреждения этого типа выдаются с учетом скорости сближения испытуемого ТС и препятствия. Данное требование не подразумевает формулирование критериев события или порога активации динамического предупреждения, так как такие критерии должны быть заданы производителем с целью адаптации ТС и/или дифференциации продукции.
A.2 Примеры процедуры испытаний
A.2.1 Азимутальная зона обзора (предупреждение о присутствии)
Процедуру проводят следующим образом:
- сетка (или испытуемое ТС) выравнена таким образом, чтобы прямоугольник был перпендикулярен к бамперу ТС и первый столбец квадратов сетки находился на расстоянии 1 м от заднего края бампера;
- объект испытаний должен быть расположен перпендикулярно поверхности земли во время проведения испытаний;
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- объект испытаний помещают перпендикулярно поверхности земли по центру квадрата сетки в азимутальной зоне обзора;
- на этапе проектирования всех крепежных приспособлений объекта испытаний необходимо учитывать, что во время эксплуатационных испытаний должен обнаруживаться только объект испытаний;
- после включения испытуемой системы фиксируют обнаружение/необнаружение объекта испытаний. При обнаружении объект испытаний должен быть четко установлен с непрерывным оповещением на протяжении не менее 3 с;
- данную процедуру повторяют для всех квадратов сетки.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
A.2.2 Высотная зона обзора (предупреждение о присутствии)
Процедуру выполняют следующим образом:
- изготавливают механизм, позиционирующий объект испытаний в горизонтальной плоскости параллельно заднему бамперу ТС таким образом, чтобы имелась возможность перемещать объект испытаний между квадратами сетки (см. рисунок 2);
- объект испытаний должен быть расположен параллельно поверхности земли во время проведения испытаний;
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- объект испытаний помещается параллельно поверхности земли по центру квадрата сетки и параллельно испытуемому ТС;
- на этапе проектирования всех крепежных приспособлений объекта испытаний необходимо учитывать, что во время эксплуатационных испытаний должен обнаруживаться только объект испытаний;
- после включения испытуемой системы фиксируют обнаружение/необнаружение объекта испытаний. При обнаружении объект испытаний должен быть четко установлен с непрерывным оповещением на протяжении не менее 3 с;
- данную процедуру повторяют для всех квадратов сетки.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирова и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
A.2.3 Азимутальная зона обзора (динамическое предупреждение)
Процедуру выполняют следующим образом:
- сетка (или испытуемое ТС) выравнена(о) таким образом, чтобы прямоугольник оказался перпендикулярен к бамперу ТС и первый столбец квадратов сетки находился на расстоянии 1 м от заднего края бампера;
- объект испытаний должен быть расположен перпендикулярно поверхности земли во время проведения испытаний;
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- объект испытаний следует последовательно размещать в каждой зоне согласно таблице 4. Испытатель должен обеспечить возможность перемещения объекта испытаний исключительно внутри каждой последовательной зоны без смещения в другую зону во время испытания;
- на этапе проектирования всех крепежных приспособлений объекта испытаний необходимо учитывать, что во время эксплуатационных испытаний должен обнаруживаться только объект испытаний;
- после включения испытуемой системы необходимо провести испытание и задокументировать, выдано ли динамическое предупреждение, которое должно быть однозначным;
- данную процедуру полностью повторяют для каждого местоположения;
- на завершающем этапе выполняют измерение и документирование задержки обнаружения с помощью испытуемой системы в рамках соответствующей процедуры испытаний (см. приложение A ПНСТ 339-2018).
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем снова включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы система не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний любого другого квадрата сетки.
A.2.4 Высотная зона обзора (динамическое предупреждение)
Процедуру проводят следующим образом:
- изготавливают механизм, позиционирующий объект испытаний по сетке в горизонтальной плоскости параллельно заднему бамперу ТС таким образом, чтобы имелась возможность перемещать объект испытаний между квадратами сетки (см. рисунок 2);
- объект испытаний должен быть расположен параллельно поверхности земли во время проведения испытаний;
- если способность испытуемой системы обнаруживать препятствия зависит от угла поворота руля ТС, испытание следует проводить в таких условиях, при которых рулевое управление находится в нейтральном положении (прямолинейное движение);
- испытание следует проводить путем позиционирования объекта испытаний в зоне обзора в каждом из положений, показанных на рисунке 4. Испытатель должен обеспечить возможность перемещения объекта испытаний только внутри каждого последовательного ряда без смещения в другой ряд во время проведения испытания;
- объект испытаний следует последовательно размещать в каждой зоне согласно таблице 5. Испытатель должен обеспечить возможность перемещения объекта испытаний исключительно внутри каждой последовательной зоны без смещения в другую зону во время испытания;
- на этапе проектирования всех крепежных приспособлений объекта испытаний необходимо учитывать, что во время эксплуатационных испытаний должен быть обнаружен исключительно объект испытаний;
- после включения испытуемой системы необходимо провести испытание и задокументировать, выдано ли динамическое предупреждение, которое должно быть однозначным;
- данная процедура полностью повторяется для каждого ряда.
Испытатель может оставить систему включенной в течение всей процедуры испытаний или отключить, а затем повторно включить систему для каждого последующего квадрата сетки. Если система включена в течение всего испытания, необходимо, чтобы она не была заблокирована и не сообщала результаты для ранее проверенных квадратов сетки. Результаты испытания каждого квадрата сетки не должны зависеть от результатов испытаний другого квадрата сетки.
Библиография
[1] | ИСО/TR 12155 | Коммерческие транспортные средства. Устройство обнаружения препятствий при движении задним ходом. Требования и испытания |
[2] | ИСО 2575 | Транспорт дорожный. Символы для органов управления, индикаторов и сигнальных устройств |
[3] | ИСО 16750 (все части) | Транспорт дорожный. Условия окружающей среды и испытания электрического и электронного оборудования |
УДК 629.3.018.7:006.354 | ОКС 43.040.15 |
Ключевые слова: интеллектуальные транспортные системы, автомобиль, устройства помощи при маневрировании задним ходом, методы испытаний | |
