ГОСТ Р МЭК 61800-4-2012
Группа Е60
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
СИСТЕМЫ СИЛОВЫХ ЭЛЕКТРОПРИВОДОВ С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ
Часть 4
Общие требования. Номинальные технические характеристики систем силовых приводов переменного тока свыше 1000 В и не более 35 кВ
Adjustable speed electrical power drive systems.
Part 4: General requirements - Rating specifications for a.с. power drive systems above 1000 V a.с. and not exceeding 35 kV
МКС 29.160.30; 29.200
Дата введения 2013-06-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Национальный исследовательский университет "МЭИ" (ФГБОУВПО "НИУ "МЭИ") и Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ) на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 333 "Вращающиеся электрические машины"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 сентября 2012 г. N 377-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 61800-4:2002* "Системы силовых электроприводов с регулируемой скоростью. Часть 4. Общие требования. Номинальные технические характеристики систем силовых приводов переменного тока свыше 1000 В и не более 35 кВ" (IEC 61800-4:2007 "Adjustable speed electrical power drive systems - Part 4: General requirements - Rating specifications for a.с. power drive systems above 1000 V a.с. and not exceeding 35 kV").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (gost.ru)
1 Область применения
Настоящий стандарт распространяется на системы регулируемых электроприводов переменного тока, которые включают в себя силовой преобразователь, устройства управления и двигатель. Настоящий стандарт не распространяется на электрическую тягу железнодорожного применения и электрические приводы транспортных устройств.
Настоящий стандарт распространяется на системы электропривода (см. рисунок 1) с линейным напряжением преобразователя от 1 до 35 кВ переменного тока, 50 или 60 Гц и с частотами преобразователя на стороне нагрузки до 600 Гц. Особые требования при напряжениях свыше 15 кВ в настоящий стандарт не включены и определяются соглашением между производителем и потребителем таких систем.
Для электроприводов на напряжение свыше 1 кВ, использующих понижающий входной трансформатор и/или повышающий выходной трансформатор в соединении с низковольтным преобразователем (ниже 1000 В), применяют МЭК 61800-2.
Вопросы электромагнитной совместимости (ЭМС) включены в МЭК 61800-3.
Специальные требования безопасности электроприводов на напряжение свыше 1 кВ рассмотрены в МЭК 61800-5.
2 Нормативные ссылки
Представленные ниже документы необязательны при пользовании настоящим стандартом. Для датированных ссылок используются только упоминаемые издания.
Для недатированных ссылок - последние издания (включая любые поправки).
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты*:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
МЭК 60034-1:2004 Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики (IEC 60034-1:2004, Rotating electrical machines - Part 1: Rating and performance)
МЭК 60034-2-1:2007 Машины электрические вращающиеся. Часть 2-1. Методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава) (IEC 60034-2-1:2007, Rotating electrical machines. Part 2-1: Standards methods for determining losses and efficiency from tests (excluding machines for traction vehicles)
МЭК 60034-2A:1974 Машины электрические вращающиеся. Часть 2. Методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава). 1-е дополнение: Измерение потерь калориметрическим методом
МЭК 60034-5:2000 Машины электрические вращающиеся. Часть 5. Степени защиты, обеспечиваемые собственной конструкцией вращающихся электрических машин (код IP). Классификация (IEC 60034-5:2000, Rotating electrical machines. Part 5. Degrees of protection provided by the integral design of rotating electrical machines (IP code). Classification)
МЭК 60034-6:1991 Машины электрические вращающиеся. Часть 6. Методы охлаждения (код IC) (IEC 60034-6:1991, Rotating electrical machines - Part 6: Methods of cooling (IC code))
МЭК 60034-7 Машины электрические вращающиеся. Часть 7. Классификация типов конструкций и монтажных устройств (код IM) (IEC 60034-7, Rotating electrical machines - Part 7: classification of types of constructions and mounting arrangements (IM code))
МЭК 60034-9:1997 Машины электрические вращающиеся. Часть 9. Предельные уровни шума (IEC 60034-9:1997, Rotating electrical machines - Part 9: Noise limits)
МЭК 60034-14:1996 Машины электрические вращающиеся. Часть 14. Механическая вибрация некоторых видов машин с высотами вала 56 мм и более. Измерения, оценка и пределы вибраций (IEC 60034-14:1996, Rotating electrical machines - Part 14: Mechanical vibration of certain machines with shaft heights 56 mm and higher - Measurement, evaluation and limits of vibration)
МЭК 60034-17:1998 Машины электрические вращающиеся. Часть 17. Асинхронные двигатели с короткозамкнутым ротором при питании от преобразователей. Руководство по применению (IEC 60034-17:1998, Rotating electrical machines - Part 17: Cage induction motors when fed from converters - Application guide)
МЭК 60034-18-31:1992 Машины электрические вращающиеся. Часть 18. Функциональная оценка систем изоляции. Раздел 31. Методики испытаний шаблонных обмоток. Оценка тепловых характеристик и классификация изоляционных систем, используемых в машинах мощностью до 50 МВА включительно, напряжением 15 кВ (IEC 60034-18-31:1992, Rotating electrical machines. Part 18: functional evaluation of insulation systems; section 31: test procedures for form-wound windings; thermal evaluation and classification of insulation systems used in machines up to and including 50 MVA and 15 kV)
Дополнение 1 (1996)
МЭК 60038:1983 Напряжения стандартные по МЭК (IEC 60038:1983, IEC standard voltages)
Дополнение 1 (1994)
Дополнение 2 (1997)
МЭК 60050-111:1996 Международный электротехнический словарь. Глава 111. Физика и химия (IEC 60050-111:1996, International Electrotechnical Vocabulary - Part 111: Physics and chemistry)
МЭК 60050-151:2001 Международный электротехнический словарь. Глава 151. Электрические и магнитные устройства (IEC 60050-151:2001, International Electrotechnical Vocabulary. Part 151: Electrical and magnetic devices)
МЭК 60050-351:1998 Международный электротехнический словарь. Глава 351. Автоматическое управление (IEC 60050-351:1998, International Electrotechnical Vocabulary - Part 351: Automatic control)
МЭК 60050-441:1984 Международный электротехнический словарь. Глава 441. Коммутационная аппаратура, аппаратура управления и предохранители (IEC 60050-441:1984, International Electrotechnical Vocabulary. Part 441: Switchgear, controlgear and fuses)
Дополнение 1 (2000)
МЭК 60050-551:1998 Международный электротехнический словарь. Глава 551. Силовая электроника (IEC 60050-551:1998, International Electrotechnical Vocabulary. Part 551: Power electronics)
МЭК 60050-601:1985 Международный электротехнический словарь. Глава 601. Производство, передача и распределение электроэнергии. Общие положения (IEC 60050-601:1985, International Electrotechnical Vocabulary. Part 601: Generation, transmission and distribution of electricity - General)
Дополнение 1 (1998)
МЭК 60076-1:2000 Трансформаторы силовые. Часть 1. Общие положения (IEC 60076-1:2000, Power transformers - Part 1: General)
МЭК 60076-2:1993 Трансформаторы силовые. Часть 2. Повышение температуры (IEC 60076-2:1993, Power transformers - Part 2: Temperature rise)
МЭК 60076-3:2000 Трансформаторы силовые. Часть 3. Уровни изоляции, испытания изоляции на пробой и наружные воздушные зазоры (IEC 60076-3:2000, Power transformers. Part 3: Insulation levels and dielectric tests and external clearances in air)
МЭК 60076-5:2000 Трансформаторы силовые. Часть 5. Стойкость к короткому замыканию (IEC 60076-5:2000, Power transformers - Part 5: Ability to withstand short circuit)
МЭК 60076-8:1997 Трансформаторы силовые. Руководство по применению (IEC 60076-8:1997, Power transformers - Application guide)
МЭК 60146-1-1:1991 Преобразователи полупроводниковые. Часть 1-1. Технические условия на основные требования (IEC 60146-1-1:1991, Semiconductor converters; general requirements and line commutated convertors; part 1-1: specifications of basic requirements)
Дополнение 1 (1996)
МЭК 60146-1-2:1991 Преобразователи полупроводниковые. Часть 1-2. Руководство по применению (IEC 60146-1-2:1991, Semiconductor converters; general requirements and line commutated convertors; part 1-2: application guide)
МЭК 60146-1-3:1991 Преобразователи полупроводниковые. Часть 1-3. Трансформаторы и катушки индуктивности (IEC 60146-1-3:1991, Semiconductor converters; general requirements and line commutated convertors; part 1-3: transformers and reactors)
МЭК 60146-2:1999 Преобразователи полупроводниковые. Часть 2. Полупроводниковые преобразователи с внутренней коммутацией, включая прямой преобразователь постоянного тока (IEC 60146-2:1999, Semiconductor convertors - Part 2: Self-commutated semiconductor converters including direct d.c. converters)
МЭК 60146-6:1992 Преобразователи полупроводниковые. Часть 6. Руководство по применению предохранителей для защиты полупроводниковых преобразователей от сверхтоков (IEC 60146-6:1992, Semiconductor converters; part 6: application guide for the protection of semiconductor convertors against overcurrent by fuses)
МЭК 60204-11:2000 Электрооборудование промышленных машин. Безопасность. Часть 11. Требования к высоковольтному оборудованию, работающему при напряжениях свыше 1000 В переменного тока или 1500 В постоянного тока и не выше 36 кВ (IEC 60204-11:2000, Safety of machinery. Electrical equipment of machines - Part 11: Requirements for HV equipment for voltages above 1000 V a.с. or 1500 V d.c. and not exceeding 36 kV)
МЭК 60417 (все части) Графические обозначения, применяемые на оборудовании (IEC 60417 (all parts), Graphical symbols for use on equipment)
МЭК 60529:1989 Степени защиты, обеспечиваемые корпусами (Код IP) (IEC 60529:1989, Degrees of protection provided by enclosures (IP code))
МЭК 60664-1:2000 Координация изоляции для оборудования в низковольтных системах. Часть 1. Принципы, требования и испытания (IEC 60664-1:2000, Insulation coordination for equipment within low-voltage systems; part 1: principles, requirements and tests)
МЭК 60721-3-1:1997 Классификация внешних воздействующих факторов. Часть 3. Классификация групп параметров окружающей среды и их степеней жесткости. Раздел 1. Хранение (IEC 60721-3-1:1997, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities - Section 1: Storage)
МЭК 60721-3-2:1997 Классификация внешних воздействующих факторов. Часть 3. Классификация групп параметров окружающей среды и их степеней жесткости. Раздел 2. Транспортирование (IEC 60721-3-2:1997, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities - Section 2: Transportation)
МЭК 60721-3-3:1994 Классификация внешних воздействующих факторов. Часть 3. Классификация групп параметров окружающей среды и их степеней жесткости. Раздел 3. Эксплуатация в стационарных условиях в местах, защищенных от непогоды (IEC 60721-3-3:1994, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities; Section 3: Stationary use at weatherprotected locations)
Дополнение 1 (1995)
Дополнение 2 (1996)
МЭК 60076-11:2004 Трансформаторы силовые. Часть 11. Сухие трансформаторы (IEC 60076-11:2004, Power transformers - Part 11: Dry-type transformers)
Дополнение 1 (1986)
МЭК 61000-2-4:1994 Электромагнитная совместимость. Часть 2. Условия окружающей среды. Раздел 4. Уровни совместимости для низкочастотных проводимых помех в промышленных установках (IEC 61000-2-4:1994, Electromagnetic compatibility (EMC) - Part 2: Environment - Section 4: compatibility levels in industrial plants for low-frequency conducted disturbances)
МЭК 61000-4-7:1991 Электромагнитная совместимость. Часть 4. Методики испытаний и измерений. Раздел 7. Общее руководство по измерениям и приборам для измерения гармоник и промежуточных гармоник для систем энергоснабжения и связанного с ним оборудования (IEC 61000-4-7:1991, Electromagnetic compatibility (EMC) - Part 4: Testing and measuring techniques - Section 7: General guide on harmonics and interharmonics measurements and instrumentation, for power suplly systems and equipment connected thereto)
МЭК/TR 61800-6:2003 Системы силовых электрических приводов с регулируемой скоростью. Часть 6. Руководство по определению типов режимов нагрузки и соответствующих номинальных токов (IEC/TR 61800-6:2003, Adjustable speed electrical power drive systems - Part 6: Guide for determination of types of load duty and corresponding current ratings)
МЭК 61378-1:1997 Трансформаторы преобразовательные. Часть 1. Трансформаторы промышленного назначения (IEC 61378-1:1997, Convertor transformers - Part 1: Transformers for industrial applications)
МЭК 61800-2:1998 Системы силовых электроприводов с регулируемой скоростью. Часть 2. Общие требования. Номинальные технические характеристики низковольтных систем силовых электроприводов переменного тока с регулируемой частотой (IEC 61800-2:1998, Adjustable speed electrical power drive systems - Part 2: General requirements - Rating specifications for low voltage adjustable frequency a.с. power drive systems)
МЭК 61800-3:1996 Системы электродвигательных приводов с регулируемой скоростью. Часть 3. Стандартные требования к электромагнитной совместимости продукции и специальные методы испытаний (IEC 61800-3:1996, Adjustable speed electrical power drive systems - Part 3: EMC requirements and specific test methods)
ИСО 1680:1999 Акустика. Методы испытаний для измерения шума, производимого вращающимися электрическими машинами (ISO 1680:1999, Acoustics - Test code for the measurement of airborne noise emitted by rotating electrical machines)
3 Термины и определения
В настоящем стандарте применены основные термины и определения, установленные в МЭК 60050-111, МЭК 60050-151, МЭК 60050-351, МЭК 60050-441, МЭК 60050-551, МЭК 60050-601, МЭК 60146-1-1, МЭК 60146-1-2 и МЭК 60146-1-3, а также следующие термины с соответствующими определениями:
3.1 Система
3.1.1 система силового электропривода (ЭП) переменного тока на напряжение свыше 1 кВ (см. рисунок 1) (а.с. power drive system (PDS) with voltage above 1 kV (see figure 1)):
Система состоит из:
- силового оборудования (включая фильтры гармоник, входной трансформатор, преобразователь, выходной трансформатор, двигатель переменного тока);
- устройств управления, защиты и вспомогательных.
Примечание 1 - На рисунке 1 показаны основные функциональные элементы, а также оборудование, которое по выбору может быть включено во многие системы привода, распространено на широкое разнообразие возможных конфигураций приводов. Секция преобразователя не показывает какую-либо конкретную топологию или типы используемых ключевых элементов, так как в настоящее время применяется их широкое разнообразие. Входной и/или выходной фильтры могут быть включены в секцию преобразователя (за исключением фильтров гармоник, которые отмечены отдельно). См. раздел 4 и приложение А.
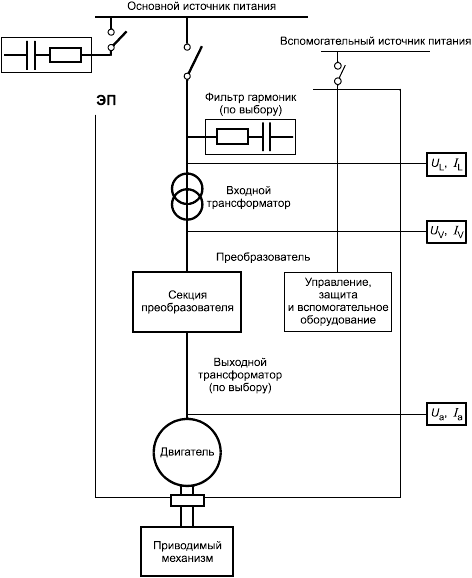
Рисунок 1 - Функциональная схема системы силового регулируемого электропривода, напряжение свыше 1 кВ
Примечание 2 - является выходным напряжением преобразователя, a
- напряжением на зажимах двигателя. В случае отсутствия выходного трансформатора и при небольшой длине кабеля
![]() .
.
Примечание 3 - Вспомогательное питание может также подаваться непосредственно от шин основного источника питания, если при этом обеспечивается достаточная надежность.
3.1.2 точки соединения (point of coupling): РСС, IPC, PC: в соответствии с определением МЭК 61000-2-4:
- РСС - точка соединения с общей сетью;
- IPC - точка соединения с частной сетью;
- PC - точка соединения с любой из этих сетей.
3.1.3 фильтр гармоник (harmonic filter): Электрическая цепь, предназначенная для уменьшения попадания гармоник тока в связанную с приводом энергетическую систему.
3.1.4 рекуперация (regeneration): Процесс преобразования механической энергии привода в электрическую и передачи ее источнику питания.
Примечание - При рекуперации двигатель работает генератором и его номинальные данные могут быть другими.
3.1.5 КПД привода (PDS efficiency), : Отношение мощности на валу двигателя к общей входной мощности, забираемой им от первичной питающей сети (см. рисунки 1 и 25), обычно выражается в процентах.
Примечание - Мощность, забираемая от вспомогательных источников, как и мощность возбуждения, включается во входную мощность.
3.1.6 КПД преобразования энергии (power conversion efficiency), : Отношение мощности на выходе преобразователя к общей входной мощности, забираемой от первичной питающей сети, включая мощность, потребляемую преобразователем от вспомогательных источников (см. рисунки 1 и 25), обычно выражается в процентах.
3.1.7 основная частота (fundamental frequency): Частота, получаемая из преобразования Фурье временной функции, с ней соотносятся все частоты спектра. Согласно МЭК 61800 основная частота - это та, которую получает или отдает преобразователь в зависимости от рассматриваемого режима.
[МЭС 101-14-50 модифицированный Международный электротехнический словарь]
Примечание 1 - В случае периодической функции основная частота обычно равна частоте самой этой функции (см. МЭС 551-20-03 и МЭС 551-20-01). Вышеприведенное определение в действительности соответствует термину "опорная основная частота" в соответствии с МЭС 551-20-04 и МЭС 551-20-02, но слово "опорная" может быть опущено там, где нет риска потери ясности. Это определение было взято для пересмотра МЭК 61000-2-2 и МЭК 61000-2-4.
Примечание 2 - В случае любого оставшегося риска недоразумений частота источника питания должна быть отнесена к направлению и скорости вращения синхронного генератора (генераторов), питающего систему.
Примечание 3 - Это определение может относиться к любой промышленной питающей сети безотносительно к ее нагрузке (одиночная или множественная нагрузка, вращающиеся машины или другая нагрузка) и даже если источником питания является статический преобразователь.
3.1.8 основная составляющая (fundamental component (or fundamental)): Имеет частоту, равную основной частоте.
3.1.9 частота гармоники (порядка ) (harmonic frequency (order
)): Частота, кратная частоте основной составляющей, т.е. отношение частоты этой гармоники к основной частоте называется порядком гармоники (рекомендованное обозначение "
") (см. МЭС 551-20-05, МЭС 551-20-07 и МЭС 551-20-09).
3.1.10 гармоническая составляющая (harmonic component): Это любая из составляющих, имеющая частоту гармоники, ее величина обычно выражается действующим значением.
Примечание - Для краткости эту составляющую можно называть просто гармоникой.
3.1.11 дробная частота (interharmonic frequency): Любая частота, не кратная основной частоте (см. МЭС 551-20-05, МЭС 551-20-07 и МЭС 551-20-09).
Примечание 1 - Расширяя понятие порядка гармоники, можно сказать, что отношение дробной частоты к основной не является целым числом (рекомендованное обозначение "").
Примечание 2 - В случае 1 можно также использовать термин "субгармоника" (см. МЭС 551-20-10).
3.1.12 дробная гармоническая составляющая (interharmonic component): Составляющая, имеющая дробную частоту, ее величина обычно выражается в виде действующего значения.
Примечание 1 - Для краткости эту составляющую можно называть просто дробной гармоникой.
Примечание 2 - Согласно МЭК 61800 и МЭК 61000-4-7, промежуток времени имеет ширину в 10 периодов основной гармоники (в системах на 50 Гц) или 12 периодов основной гармоники (в системах на 60 Гц), что приблизительно составляет 200 мс. Поэтому разность частот двух соседних дробных гармонических составляющих равна примерно 5 Гц. В случае других основных частот временной интервал должен выбираться между 6 периодами основной гармоники (примерно 1000 мс при 6 Гц) и 18 периодами основной гармоники (примерно 100 мс при 180 Гц).
3.1.13 гармонический состав (harmonic content), : Сумма гармонических составляющих периодической величины.
[МЭС 551-20-12]
Примечание 1 - Гармонический состав есть функция времени.
Примечание 2 - Для практического анализа может потребоваться периодическая аппроксимация.
Примечание 3 - Гармонический состав зависит от выбора основной составляющей. Если из контекста неясно, какая используется, следует указать это.
Примечание 4 - На практике сумма ограничивается порядком .
Примечание 5 - Действующее значение гармонического состава
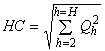 ,
,
где - порядок гармоники (согласно 3.1.9);
- действующее значение гармонической составляющей порядка
;
- равно 40 в настоящем стандарте.
3.1.14 результирующее гармоническое искажение (total harmonic distortion), : Отношение действующего значения гармонического состава к действующему значению основной составляющей или относительное значение основной составляющей переменной величины (см. МЭС 551-20-13).
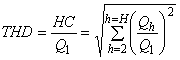 ,
,
где - представляет собой ток или напряжение;
- действующее значение основной составляющей;
- порядок гармоники (согласно 3.1.9);
- действующее значение гармонической составляющей порядка
;
- равно 40 в настоящем стандарте.
3.1.15 результирующий состав искажения (total distortion content), : Величина, получаемая в результате вычитания из переменной величины ее основной составляющей или относительного значения основной составляющей.
[МЭС 551-20-11]
Примечание 1 - Результирующий состав искажения включает гармонические составляющие и дробные гармоники, если они есть.
Примечание 2 - Результирующий состав искажения зависит от выбора основной составляющей. Если из контекста неясно, какая вычитается, следует указать это.
Примечание 3 - Результирующий состав искажения есть функция времени.
Примечание 4 - Переменная величина является периодической функцией с нулевой постоянной составляющей.
Примечание 5 - Действующее значение результирующего состава искажения
![]() ,
,
где в дополнение к обозначениям в 3.1.14 - результирующее действующее значение переменной величины (см. также МЭС 101-14-54).
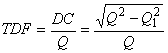
3.1.16 результирующий коэффициент искажения (total distortion ratio), : Отношение действующего значения результирующего состава искажения к действующему значению основной составляющей или относительное значение основной составляющей переменной величины.
[МЭС 551-20-14]
 .
.
Примечание 1 - Относительный результирующий коэффициент искажения зависит от выбора основной составляющей. Если из контекста неясно, какая она, следует дать указание на этот счет.
Примечание 2 - Результирующий коэффициент искажения может быть отнесен к гармонике определенного порядка, что должно быть объявлено отдельно.
Примечание 3 - можно рассматривать как аппроксимацию
, в котором дробными гармониками пренебрегли вследствие малости их амплитуд.
Примечание 4 - Кривая напряжения в распределительной сети обычно искажена меньше, чем кривая тока. Поэтому оценка двух коэффициентов и
по напряжению дает одинаковый результат. Если делать ее для токов, они могут быть существенно разными.
3.1.17 результирующий фактор искажения (total distortion factor), : Отношение действующего значения результирующего состава искажения к действующему значению самой переменной величины.
[МЭС 551-20-16 и МЭС 101-14-55]
 .
.
Примечание 1 - Результирующий коэффициент искажения зависит от выбора основной составляющей. Если из контекста неясно, какая она, следует дать указание на этот счет.
Примечание 2 - Отношение к
равно отношению действующих значений основной составляющей и всей переменной величины. Согласно МЭС 551-20-17 и МЭС 161-02-22 это есть коэффициент искажения по первой гармонике.
![]() .
.
3.1.18 коэффициент искажения отдельной гармоники (individual harmonic distortion), : Отношение любой гармоники к основной.
3.1.19 характеристика гармоник тока (characteristic current harmonics): Порядки гармоник тока, создаваемых преобразовательным оборудованием при нормальной работе.
Примечание 1 - Например, в шестипульсном преобразователе характеристика гармоник тока: нет гармоник кратных трем, есть только нечетные порядков ![]() (
( - целая величина).
Примечание 2 - В электрической системе могут также возникать гармоники, вызванные взаимодействием с нагрузкой преобразователя. Их называют дробными гармониками.
3.1.20 номинальное напряжение (rated voltage): Действующее значение линейного напряжения в номинальном режиме:
- первичная сторона входного трансформатора ;
- на входе преобразователя ;
- на выходе преобразователя ;
- напряжение двигателя .
3.1.21 номинальное значение основной гармоники напряжения (rated fundamental voltage): Действующее значение основной гармоники напряжения в номинальном режиме:
- первичная сторона входного трансформатора ;
- на входе преобразователя ;
- на выходе преобразователя ;
- основная гармоника напряжения двигателя .
3.1.22 номинальный переменный ток (rated а.с. current): Действующее значение переменного тока в номинальном режиме:
- первичная сторона входного трансформатора ;
- на входе преобразователя ;
- на выходе преобразователя ;
- номинальный ток двигателя .
3.1.23 номинальное значение основной гармоники тока (rated fundamental current): Действующее значение основной гармоники тока в номинальном режиме:
- первичная сторона входного трансформатора ;
- на входе преобразователя ;
- на выходе преобразователя ;
- основная гармоника номинального тока двигателя .
3.1.24 перегрузочная способность (overload capability): Максимальный ток, который может быть подан от источника питания в течение определенного периода времени без превышения установленных пределов при установленных рабочих условиях:
- первичная сторона входного трансформатора ;
- на входе преобразователя ;
- на выходе преобразователя ;
- перегрузочный ток двигателя .
3.2 Параметры силового электропривода
3.2.1 входная мощность со стороны питающей сети (line-side input power), : Входная активная мощность, потребляемая из сети.
3.2.2 полная (кажущаяся) входная мощность (line-side input apparent power), : Полная (кажущаяся) мощность, потребляемая из сети.
3.2.3 результирующий коэффициент мощности на входе (input total power factor), : Отношение входной активной мощности к полной, определяемых в линии, соединяющей ЭП с питающей сетью.
Пример - В трехфазной системе при синусоидальном напряжении
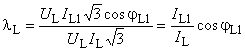 .
.
Примечание 1 - Коэффициент мощности учитывает влияние фазового сдвига ![]() и гармоник с помощью коэффициента искажения
и гармоник с помощью коэффициента искажения ![]() .
.
Примечание 2 - Определение относится ко входу преобразователя (индекс ) или двигателя (индекс
).
3.2.4 несимметрия напряжения (voltage unbalance (imbalance)): Ситуация в многофазной системе, когда не равны действующие значения основной гармоники линейных напряжений или фазовые углы между смежными фазами.
Примечание 1 - Степень этого неравенства обычно выражается в виде отношения составляющих обратной и нулевой последовательностей к составляющей прямой последовательности.
[МЭС 161-08-09 модифицированный]
,
и
представляют собой три линейных напряжения, а
![]() есть отклонение каждого из них,
есть отклонение каждого из них, - несимметрия напряжений, равная отношению амплитуды напряжения обратной последовательности к амплитуде напряжения прямой последовательности:
 .
.
Примечание 2 - Формула, упомянутая в примечании 1, дает отличную аппроксимацию (с ошибкой менее 5% при изменении амплитуд в пределах ±20% и фазовых сдвигов в пределах ±15% по сравнению с идеальной симметричной системой прямой или обратной последовательности). Более простая аппроксимация
![]()
дает приемлемые результаты, вплоть до 7% (абсолютная ошибка меньше 1%). Еще одна простая аппроксимация дает результаты со сравнимой ошибкой:
![]() .
.
3.2.5 переходное питающее напряжение (supply transient overvoltage): Мгновенное пиковое напряжение, которое может появиться между проводами, подающими питание к силовому электроприводу, когда он отключен.
3.2.6 переходная питающая энергия (supply transient energy): Энергия, которую система питания может подать к зажимам силового электропривода в переходном режиме.
3.3 Преобразователь
3.3.1 секция преобразователя (напряжение свыше 1 кВ) (converter section (voltage above 1 kV)): Силовой электронный преобразователь, работающий при напряжении свыше 1 кВ, но не более 35 кВ, по схеме на рисунке 1.
3.3.2 входной фильтр преобразователя (converter input filter): Цепочки, присоединенные к входным зажимам преобразователя для снижения ![]() (перенапряжения для изоляции трансформатора) или излучения радиопомех.
(перенапряжения для изоляции трансформатора) или излучения радиопомех.
3.3.3 напряжение на шинах постоянного тока преобразователя (converter d.c. link voltage), : Среднее значение напряжения на шинах постоянного тока (на входе преобразователя).
3.3.4 ток в звене постоянного тока преобразователя (converter d.c. link current), : Среднее значение тока в шинах постоянного тока (на входе преобразователя).
3.3.5 снаббер (цепь) (snubber (circuit)): Вспомогательная цепь, соединенная с одним или более полупроводниковым прибором в целях снижения перенапряжения на его (их) зажимах, возникающих из-за высокой скорости нарастания тока, переходных перенапряжений, коммутационных потерь и т.п.
3.3.6 связь постоянного тока (d.c. link): Силовая цепь постоянного тока, соединяющая входной и выходной преобразователи в схемах с промежуточным звеном постоянного тока и состоящая из конденсаторов и/или реакторов для уменьшения пульсаций постоянного напряжения или тока.
3.3.7 выходной фильтр преобразователя (converter output filter): Цепочки, присоединяемые к силовому выходу преобразователя для уменьшения ![]() (перенапряжения на изоляции двигателя и генерирующего подшипниковые токи) или потерь от высших гармоник.
(перенапряжения на изоляции двигателя и генерирующего подшипниковые токи) или потерь от высших гармоник.
3.3.8 выходная мощность преобразователя на переменном токе (а.с. converter output power), : Мощность на выходных зажимах преобразователя на основной гармонике.
3.3.9 полная (кажущаяся) мощность на выходе преобразователя (apparent converter output power), : Полная (кажущаяся) мощность на выходных зажимах преобразователя.
3.3.10 переходной ток короткого замыкания на выходе (dynamic short-circuit output current): Постоянный или переменный ток в переходном процессе, который протекает из преобразователя в короткозамкнутую цепь через его выходные зажимы.
3.3.11 рабочий диапазон частоты (operating frequency range): Диапазон измерения частоты основной гармоники на выходе преобразователя (,
), регулируемой при определенных условиях работы.
3.4 Выходные характеристики силового электропривода
3.4.1 нагрузочная диаграмма (load envelope): Площадь, описываемая зависимостью момента от скорости ЭП в продолжительном нагрузочном режиме.
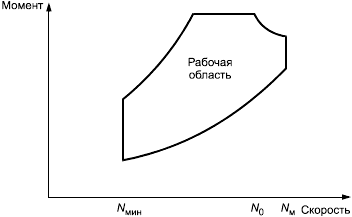
Рисунок 2 - Пример нагрузочной диаграммы
3.4.2 минимальная рабочая скорость (minimum operation speed), : Минимальная скорость двигателя, требуемая приводным механизмом.
3.4.3 максимальная рабочая скорость (maximum operation speed), : Максимальная скорость двигателя, требуемая приводным механизмом.
3.4.4 базовое значение скорости (base speed), : Наибольшая скорость двигателя, при которой ЭП способен продолжительно развивать номинальный момент.
Примечание - Базовое значение скорости есть точка перехода от работы с постоянным моментом к режиму ослабления поля.
3.4.5 работа с ослаблением поля (field weakening operation): Работа с уменьшенным потоком в диапазоне скоростей между базовой () и максимальной (
).
3.4.6 пульсация электромагнитного момента (air-gap torque pulsation): Периодические изменения электромагнитного момента двигателя в установившихся режимах, величина которых оценивается разностью между положительным и отрицательным пиковыми значениями.
3.5 Регулирование
3.5.1 система управления (control system): Электронная система, которая обеспечивает работу силового преобразователя и набор информации от управляющих команд и обратных связей.
3.5.2 регулируемые переменные величины (controlled variable): Набор переменных в разомкнутой или замкнутой системе управления ЭП.
Примечание - Примерами регулируемых переменных являются напряжение, ток статора, частота, скорость вращения, скольжение и момент.
3.5.3 вспомогательные переменные (service variable): Определенные переменные, обычно связанные с условиями окружающей среды (например, температурой), по которым следящая система должна вносить коррекцию, чтобы поддерживать идеальное значение регулируемой величины.
3.5.4 рабочее значение (operating variable): Определенное значение переменной (например, момента нагрузки в приводе регулирования скорости), отличающееся от тех, что соответствуют условиям регулирования, по которому следящая система должна вносить коррекцию, чтобы поддерживать идеальное значение регулируемой величины.
3.5.5 регулирование в разомкнутой системе (open-loop control): Регулирование, при котором не измеряется регулируемая переменная.
3.5.6 регулирование в системе с обратными связями/в замкнутой следящей системе (feedback control/closed-loop control): Регулирование, при котором управляющие воздействия зависят от измерения регулируемой переменной.
3.5.7 стимул (stimulus): Любое возбуждающее воздействие, которое вызывает ответную реакцию.
3.5.8 возмущение (disturbance): Нежелательное и чаще всего непредсказуемое изменение входной переменной, отличающееся от задания.
3.5.9 реакция во времени (time response): Изменение во времени выходной переменной системы, вызванное определенной вариацией одной из входных величин.
3.5.10 реакция на скачок (step response): Изменение во времени выходной переменной системы, вызванное скачкообразным изменением одной из входных величин.
Примечание - Когда изменение входной величины равно единице, реакция называется единичной реакцией на скачок.
3.6 Испытания
3.6.1 типовое испытание (type test): Испытание одного или нескольких элементов системы для того, чтобы показать, что она удовлетворяет определенным спецификациям.
[МЭК 60050-16-16 модифицированный]
3.6.2 выходное испытание (routine test): Испытание, которому подвергается каждое устройство в ходе или после изготовления, чтобы убедиться, что оно удовлетворяет определенным требованиям.
[МЭК 60050-16-17 модифицированный]
3.6.3 выборочное испытание (sampling test): Испытание нескольких образцов, случайно взятых из партии.
[МЭК 60050-16-20 модифицированный]
3.6.4 специальное испытание (special test): Испытание, дополняющее выходные и типовые по усмотрению поставщика системы или по соглашению между поставщиком и потребителем или его представителем.
[МЭК 61800-2, пункт 7.1.4, модифицированный]
3.6.5 приемочное испытание (acceptance test): Испытание по соглашению, чтобы убедить потребителя в том, что устройство отвечает определенным условиям его спецификации.
[МЭК 60050-16-23]
3.6.6 приемо-сдаточное испытание (commissioning test): Испытание устройств или оборудования, проводимое на месте работы, чтобы подтвердить правильность монтажа и условий эксплуатации.
[МЭК 60050-16-24 модифицированный]
3.6.7 доказательное испытание (witness test): Любое из вышеперечисленных испытаний в присутствии покупателя, потребителя или его представителя.
[МЭК 61800-2, пункт 7.1.8]
3.6.8 испытание отдельного компонента (separate component test): Индивидуальное испытание каждого из основных компонентов ЭП (трансформатора, двигателя и т.д.).
3.6.9 испытание системы привода (drive system test): Испытание всего ЭП для подтверждения характеристик системы в целом.
3.7 Обозначения
В таблице 1 представлены обычно используемые обозначения.
Таблица 1 - Обозначения
Обозначение | Единица измерения | Определение в разделе | Показатель |
A | 3.1.24 | Перегрузочный ток (перегрузочная способность) | |
A | 3.1.22 | Номинальный выходной ток в продолжительном режиме | |
A | 3.1.22 | Номинальное значение основной гармоники выходного тока | |
A | 3.3.4 | Ток в звене постоянного тока | |
A | 3.1.22 | Номинальный ток электропривода, потребляемый из сети переменного тока | |
A | 3.1.23 | Номинальное значение основной гармоники тока преобразователя со стороны питающей сети | |
A | 3.1.22 | Номинальный выходной ток преобразователя | |
кгм | Момент инерции | ||
Hм | Электромагнитный момент | ||
Hм | Момент на валу | ||
об/мин | Скорость вращения двигателя | ||
об/мин | 3.4.4 | Базовое значение скорости | |
об/мин | 3.4.3 | Максимальная рабочая скорость | |
об/мин | 3.4.2 | Минимальная рабочая скорость | |
Вт | Номинальное значение выходной мощности преобразователя на переменном токе | ||
Вт | 3.2.1 | Номинальная входная мощность | |
Вт | Выходная мощность (на валу двигателя) | ||
МЭК 61800-3 | Относительный ток короткого замыкания оборудования | ||
ВА | Номинальная полная (кажущаяся) мощность на выходе преобразователя | ||
ВА | 3.2.2 | Номинальная входная полная (кажущаяся) мощность | |
% | См. 3.1.16 | Результирующий коэффициент искажения на выходе преобразователя | |
| % | См. 3.1.16 | Результирующий коэффициент искажения со стороны питающей сети (с учетом дробных гармоник) |
| % | См. 3.1.14 | Результирующее гармоническое искажение |
| % | См. 3.1.14 | Результирующее гармоническое искажение со стороны питающей сети (без учета дробных гармоник) |
| В/Гц | Отношение номинального напряжения к номинальной частоте | |
В | 3.1.21 | Основная гармоника номинального напряжения переменного тока на стороне нагрузки преобразователя | |
В | 3.1.20 | Номинальное напряжение системы ЭП | |
В | 3.1.20 | Номинальное входное напряжение переменного тока преобразователя | |
В | 3.1.21 | Номинальное значение основной гармоники напряжения на входе преобразователя | |
| МЭК 61800-2 | Коэффициент мощности со стороны питающей сети | |
| МЭК 61800-2 | Коэффициент мощности на входе преобразователя | |
ГЦ | Номинальная частота питающей сети | ||
% | 3.1.6 | КПД преобразования энергии | |
% | 3.1.5 | КПД привода | |
% | 11.1 | КПД двигателя | |
% | 11.1 | КПД трансформатора | |
3.2.3 | Результирующий коэффициент мощности на входе системы ЭП | ||
Примечание 1 - Индекс | |||
4 Обзор топологических структур приводов
4.1 Классификация структур
Структуры различных систем электропривода можно классифицировать по следующим основным признакам:
- конфигурация преобразователя;
- способ коммутации;
- тип двигателя.
Любая комбинация признаков может быть использована для формирования топологической структуры системы ЭП. Примеры обычно применяемых структур даны в приложении А.
По типу преобразователя ЭП подразделяют на системы со звеном постоянного тока и с непосредственной связью. Второй подход к классификации - по способу коммутации, которая может быть принудительной и естественной (самокоммутацией) или с непосредственной связью.
4.2 Конфигурация преобразователя
4.2.1 Преобразователь со звеном постоянного тока
Преобразование энергии переменного тока с постоянной частотой и напряжением на входе преобразователя в энергию переменного тока с варьируемыми частотой и напряжением на выходе осуществляется с промежуточным звеном постоянного тока, как показано на рисунке 3.

Рисунок 3 - Общая структура системы привода, имеющего преобразователь со звеном постоянного тока
Звено постоянного тока включает одно или более фильтрующих устройств (последовательный реактор, параллельный конденсатор или оба вместе). Если звено постоянного тока содержит индуктивность, преобразователь, питающий двигатель, называется инвертором тока (ИТ). При наличии емкости в звене постоянного тока он называется инвертором напряжения (ИН).
4.2.2 Преобразователь с непосредственной связью
Преобразование энергии переменного тока с постоянной частотой и напряжением на входе преобразователя в энергию переменного тока с варьируемыми частотой и напряжением на выходе осуществляется без промежуточного звена постоянного тока, как показано на рисунке 4.
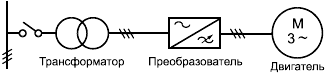
Рисунок 4 - Общая структура системы привода с непосредственным преобразователем
Трансформатор на обоих рисунках обычно имеет трехфазную первичную обмотку и одну или более вторичных трехфазных обмоток в зависимости от схемы присоединяемого к ним преобразователя. Последняя может состоять из группы шестипульсных модулей преобразователя, соединенных последовательно и/или параллельно, а иногда и с последовательным (чередующимся) управлением, соответственно для улучшения гармонического состава и коэффициента мощности.
4.2.3 Способ коммутации
4.2.3.1 Внешняя (принудительная) коммутация
Она осуществляется от источника сигнала вне преобразователя и бывает линейной и нагрузочной. В случае нагрузочной коммутации преобразователя, питающего двигатель, преобразователь называется инвертором, коммутируемым нагрузкой.
4.2.3.2 Самокоммутация
Самокоммутация означает, что она осуществляется с помощью элементов внутри преобразователя.
4.3 Тип двигателя
Основные типы двигателей - синхронные и асинхронные. Чаще всего оба типа являются трехфазными или с несколькими трехфазными обмотками статора. Асинхронные двигатели могут подразделяться на двигатели с короткозамкнутым ротором и двигатели с фазным ротором.
На рисунке 5 показан пример группы модулей преобразователя и двигателя с двумя отдельными обмотками статора.
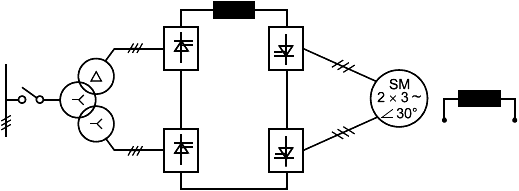
Рисунок 5 - Пример группы модулей преобразователя и двигателя с раздельными обмотками статора
4.4 Конфигурации с шунтированием и резервированием
Системы электропривода могут иметь возможность шунтирования и/или резервирования преобразователя. Этим достигаются следующие цели:
- обыкновенный переход от питания переменной частотой к питанию основной частотой, когда процесс пуска привода завершился;
- аварийное переключение от питания переменной частотой к питанию основной в случае неполадки в преобразователе, так чтобы система работала с одной фиксированной скоростью;
- максимальная сохранность и надежность системы, достигаемые включением в нее нескольких каналов силовых преобразователей, выборочно работающих как отдельные подсистемы, - каждый из них обеспечивает работу системы при частичных неисправностях, иногда при пониженной мощности, каждая подсистема привода действует как шунтирующий канал регулирования частоты.
Примечание - В случае наличия шунтирования необходимо обращать внимание на номинальные данные двигателя при прямом пуске без преобразователя.
На рисунке 6 представлен пример с шунтированием в системе привода со звеном постоянного тока: даже при шунтировании в нем может присутствовать трансформатор для согласования уровня напряжений.

Рисунок 6 - Система с шунтированием и звеном постоянного тока преобразователя
Пример конструкции с резервированием представлен на рисунке 7.
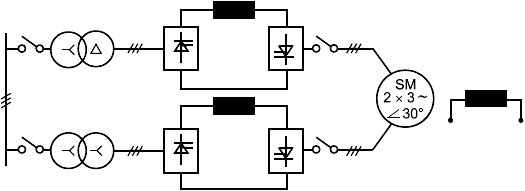
Рисунок 7 - Управление моментом синхронного двигателя в частично резервированной системе
4.5 Рекуперация и динамическое торможение
4.5.1 Рекуперативное торможение
В общем случае момент и скорость имеют два знака, поэтому существуют четыре квадранта, характеризирующие работу привода. Если момент и скорость имеют одинаковые знаки, энергия поступает из сети в двигатель. Если момент препятствует вращению, энергия передается из двигателя в сеть.
Передача мощности из сети в двигатель соответствует двигательному режиму работы, в то время как обратное направление из двигателя в сеть называется режимом рекуперации. Многие из схем, представленные в приложении А, способны работать в четырех квадрантах, т.е. и в режиме рекуперативного торможения.
4.5.2 Динамическое торможение
При динамическом торможении энергия рассеивается в резисторе.
Для примера на рисунке 8 показан привод с инвертором напряжения, в котором резистор включен параллельно с конденсатором звена постоянного тока; когда ток изменяет знак, ключ срабатывает, чтобы поддержать напряжение на конденсаторе, позволяя энергии торможения рассеиваться в резисторе.
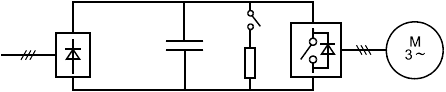
Рисунок 8 - Пример динамического торможения
5 Условия сервиса
5.1 Установка и эксплуатация
5.1.1 Обслуживание электрической части
5.1.1.1 Нормальные (обычные) условия обслуживания
Если это специально не оговаривается, систему силового электропривода проектируют для условий обслуживания электрической части, которые представлены в таблице 2. Соответствующие критерии ЭМС этого устройства можно найти в МЭК 61800-3 (пункт 5.2).
Таблица 2 - Условия обеспечения питающего напряжения на зажимах электропривода (основных и вспомогательных)
Показатель | Уровень | Базовый документ |
Изменение частоты |
| МЭК 61800-3 |
Скорость изменения частоты |
| МЭК 61800-3 |
Изменение напряжения | ±10% | МЭК 61800-3 |
Флуктуация напряжения | Максимальный перепад амплитуды: | МЭК 61800-3 |
Провалы напряжения | 10-50% | МЭК 61800-3 |
Несимметрия напряжения | Основное питание: | МЭК 61800-3 |
Гармоники напряжения: | МЭК 61800-3 | |
- статика |
| |
- переходные режимы |
| |
Дробные гармоники напряжения | МЭК 61000-2-4, приложение А | |
- статика |
| |
- переходные режимы |
| |
Коммутационные провалы | Глубина: 40% | МЭК 61800-3 |
Примечание 1 - Номинальный режим при напряжениях ниже 100% номинального будет предметом согласования между потребителем и поставщиком системы. | ||
5.1.1.2 Полное сопротивление источника
Устройства защиты силового электропривода, в частности защита линейного кабеля (см. 9.3), должны быть рассчитаны на нормальную работу в определенном диапазоне значений отношения тока короткого замыкания .
Чтобы обеспечить номинальный режим, минимальное отношение для стандартного исполнения силового привода должно быть равно 20, будучи определенным в точке присоединения (ТП).
Максимальное значение для стандартного исполнения силового привода, чтобы удовлетворять условиям защиты, должно быть равно 100, будучи определенным в ТП.
В случае если заказчик желает иметь реальный диапазон значений ниже 20 или больше 100, это следует оговаривать особо.
5.1.1.3 Повторяющиеся и неповторяющиеся переходные процессы
Типичная кривая напряжения переменного тока содержит повторяющиеся и неповторяющиеся переходные процессы. Они вызываются коммутациями в преобразователе, подключениями контрольных и распределительных устройств к схеме привода, а также возмущениями в энергосистеме.
Привод следует проектировать так, чтобы нормально работать с неповторяющимися переходными процессами, которые появляются при включении питающего трансформатора (см. 9.2.1) или другого трансформатора, подключаемого к ТП.
Примечание - Если в ТП может быть необычно высокое напряжение, потребитель должен об этом предупредить. Например, техническое требование потребителя при питании напряжением 6 кВ уточняет:
- в случае дистанционного включения: импульс напряжения 15 кВ, 250/2500 мкс;
- в случае непосредственного включения: импульс напряжения 12,3 кВ, 50/400 мкс.
5.1.1.4 Необычные условия обслуживания электрической части
Необычные условия обслуживания должны быть предметом специального соглашения между потребителем и поставщиком системы.
5.1.2 Условия окружающей среды
5.1.2.1 Климатические условия
Система силового электропривода (возможна без силового трансформатора и с другими способами установки двигателя) работает в условиях окружающей среды, предусмотренных в МЭК 60721-3-3 для класса ЗКЗ и в МЭК 60146-1-1 (раздел 2) для окружающей среды. Они включают следующие:
a) диапазон температур охлаждающей среды:
- воздуха от 0 °С до 40 °С,
- воды на входе от 5 °С до 30 °С;
b) диапазон окружающих температур:
- от 5 °С до 40 °С,
- 30 °С средняя дневная температура воздуха,
- 25 °С средняя годовая температура воздуха;
c) относительная влажность:
- от 5% до 85% без кондиционирования;
d) высота:
- 1000 м максимальная над уровнем моря;
e) содержание пыли и твердых частиц:
- оборудование стандартного исполнения спроектировано для чистого воздуха со степенью загрязнения 2, любые другие условия относятся к необычным и должны быть оговорены потребителем (см. МЭК 60529 о степени защиты закрытых объектов);
f) расширенное время простоя:
- если оно предвидится, потребитель должен указать, даже если окружающие условия находятся в пределах, рассмотренных выше.
5.1.2.2 Условия монтажа
Система силового электропривода (возможна без силового трансформатора и с другими способами установки двигателя) должна быть установлена внутри помещения на жесткой монтажной поверхности или в дополнительной оболочке, которая не оказывает серьезного влияния на вентиляцию или систему охлаждения. Для повышения надежности может быть добавлен кондиционер воздуха.
Другие особенности установки требуют специального рассмотрения, уточнения и консультаций с изготовителем преобразователя.
Вибрации должны оставаться внутри пределов, предусмотренных МЭК 60721-3-3, класс ЗМ1 (см. таблицу 3), которые считаются нормальными для стационарного оборудования. Вибрации за этими пределами или использование ЭП в нестационарном (подвижном) оборудовании следует рассматривать как необычные механические условия.
Таблица 3 - Пределы вибрации установки
Частота, Гц | Амплитуда, мм | Ускорение, м/с |
2 | 0,3 | Не определено |
9 | Не определено | 1 |
Главный трансформатор (если он есть) и двигатель должны соответствовать стандартам на применение этих видов продукции (МЭК 60078 или МЭК 60726 и МЭК 60034 соответственно).
5.1.2.3 Необычные условия окружающей среды
Эксплуатацию преобразователя и других элементов системы электропривода в необычных условиях, которые перечислены в МЭК 60146-1-1, следует рассматривать как особенную. Потребитель должен заранее оговорить эти необычные условия.
Особенности, которые не предусмотрены в 5.1.2 как необычные условия окружающей среды, должны быть согласованы потребителем с поставщиком оборудования.
Отметим необычные условия работы преобразователя:
a) подверженность разрушающим агрессивным испарениям;
b) подверженность повышенной влажности (относительной влажности более 58%) и относительным изменениям влажности (превышающим 0,005 о.е./ч);
c) подверженность повышенному запылению;
d) подверженность абразивной пыли;
e) подверженность конденсату пара или воды;
f) подверженность масляным испарениям;
g) подверженность взрывоопасной смеси пыли или газов;
h) подверженность повышенному содержанию солей в воздухе;
i) подверженность повышенным вибрациям, ударам или качаниям;
j) подверженность дождевой и просачивающейся воде;
k) подверженность необычным условиям транспортирования или хранения;
I) подверженность экспериментальным или неожиданным изменениям температуры (превосходящими 5 К/ч);
m) охлаждающая вода, содержащая кислоту или загрязнения, которые вызывают повышенные осадки, электролиз, коррозию или засорение, морская и жесткая вода;
n) необычно высокая радиация;
о) высота более 1000 м;
р) установка оборудования на открытом воздухе.
При необычных условиях для главного трансформатора (если он есть) и двигателя следует обратиться к стандартам на применение (МЭК 60076 или МЭК 60726 и МЭК 60034 соответственно).
5.1.3 Введение в эксплуатацию
Если нет других соглашений, введение в эксплуатацию имеет те нормальные и необычные условия, что и нормальная эксплуатация.
5.2 Транспортирование
5.2.1 Климатические условия
5.2.1.1 Общее требование
Оборудование должно быть пригодно для транспортирования в упаковке поставщика и в климатических условиях, оговоренных в классе 2КЗ МЭК 60721-3-2.
5.2.1.2 Окружающая температура:
- от минус 25 °С до плюс 55 °С;
- от минус 25 °С до плюс 70 °С в течение до 24 часов.
Примечание 1 - Температурные границы относятся непосредственно к температурам окружающей среды (например, внутри контейнера).
Примечание 2 - Эти границы остаются в силе, если удалена охлаждающая жидкость.
Примечание 3 - Для самой высокой температуры возможны более низкие значения, если только сделано соответствующее предупреждение.
5.2.1.3 Относительная влажность
Менее 35% при 40 °С.
Примечание - Некоторые сочетания температуры и влажности могут вызвать конденсацию.
5.2.1.4 Атмосферное давление
Диапазон от 86 до 106 кПа.
Основной трансформатор (если он есть) и двигатель должны соответствовать стандартам на применение этих изделий (МЭК 60076 или МЭК 60726 и МЭК 60034 соответственно).
5.2.1.5 Необычные климатические условия
Температура ниже минус 25 °С.
Там, где при транспортировании температура может быть ниже минус 25 °С, требуется использовать подогреваемое транспортное средство или удалить отдельные компоненты, чувствительные к низким температурам.
5.2.2 Механические условия
5.2.2.1 Общее требование
Оборудование должно быть приспособлено к транспортированию в упаковке поставщика при ограничениях, оговоренных в классе 2М1 МЭК 60721-3-2. Он включает нижеприведенные требования к вибрациям и ударам.
5.2.2.2 Ограничения по вибрации
Ограничения по вибрации представлены в таблице 4.
Таблица 4 - Ограничения по вибрации при транспортировании (см. класс 2М1 в МЭК 60721-3-2)
Частота, Гц | Амплитуда, мм | Ускорение, м/с |
2 | 3,5 | Не приводится |
9 | Не приводится | 10 |
200 | Не приводится | 15 |
5.2.2.3 Ограничения по ударам
Ограничения соответствуют удару при свободном падении с высоты 0,1 м.
Примечание 1 - Если возможны удары и вибрации, превосходящие эти пределы, требуются специальные упаковка или транспорт.
Примечание 2 - Если условия менее опасны, чем отмеченные предельные, можно понизить требования к упаковке посредством соглашения между производителем компонентов и системы в целом, поставщиком, потребителем и транспортировщиком.
Примечание 3 - Основной трансформатор (если он есть) и двигатель должны соответствовать стандартам на их применение (МЭК 60076 или МЭК 60726 и МЭК 60034 соответственно).
5.3 Хранение оборудования
5.3.1 Общее требование
Оборудование должно быть помещено в соответствующее укрытие сразу же по получении, если оно имеет упаковку, не подходящую для наружного или незащищенного хранения.
5.3.2 Климатические условия
Оборудование должно быть пригодным для хранения при условиях окружающей среды, оговоренных в МЭК 60721-3-1. Документ содержит следующие требования:
a) окружающая температура класс 1К4:
- от 5 °С до 40 °С;
b) относительная влажность класс 1КЗ:
- от 5% до 95%;
c) атмосферное давление:
- от 86 до 106 кПа.
Эти границы остаются в силе, если удалена охлаждающая жидкость.
Условия и длительность хранения должны быть определены и согласованы между потребителем и поставщиком системы.
Для преобразователя, трансформатора и двигателя приоритетными являются стандарты на применение (МЭК 60146, МЭК 60076 или МЭК 60726 и МЭК 60034 соответственно).
5.3.3 Специфические факторы, представляющие опасность при хранении
Особое внимание следует обращать на:
a) воду - за исключением оборудования, специально спроектированного для наружной установки, остальное должно быть защищено от дождя снега, слякоти и т.п.;
b) конденсацию - внезапные изменения температуры и влажности должны быть исключены;
c) материалы, вызывающие коррозию, - оборудование должно быть защищено от соленых брызг, агрессивных газов и жидкостей, вызывающих коррозию;
d) время - вышеуказанные требования относятся к транспортированию и хранению общей продолжительностью до шести месяцев; более длительное хранение может потребовать специального рассмотрения (например, снижения диапазона окружающей температуры по сравнению с предусмотренным в классе 1КЗ МЭК 60721-3-1);
e) грызунов и плесень - когда условия хранения способствуют воздействию грызунов или грибковой плесени, должны быть предусмотрены следующие меры защиты оборудования:
- от грызунов - материалы с наружных сторон оборудования и отверстия охлаждения, соединений и т.п. должны предотвращать атаки и проникновение грызунов;
- от плесени - материалы должны иметь такую степень сопротивления плесени, которая пригодна для окружающей среды при хранении и работе оборудования.
6 Номинальные данные
6.1 Система силового электропривода
6.1.1 Общее положение
Спецификация основных компонентов ЭП находится в зоне ответственности поставщика системы (см. раздел 8).
6.1.2 Номинальные значения входных величин электропривода
6.1.2.1 Входные напряжения и частоты
Номинальные значения входных напряжений и частот ЭП устанавливает потребитель.
Согласно МЭК 60038, стандартными значениями являются: 3,00; 3,30; 4,16; 6,00; 6,60; 10,00; 11,00; 12,47; 13,20; 13,80; (15,00); 20,00; 22,00; 24,94; 33,00; 34,50 кВ. Другие нестандартные значения напряжения могут быть назначены для оптимизации или специальных условий.
6.1.2.2 Входные токи
Существует несколько значений входных токов, которые должны быть обеспечены источником питания при номинальных линейном напряжении и нагрузке ЭП:
- действующее значение полного тока ЭП - , оно может включать ток
, потребляемый вспомогательными элементами, если они подключены к той же линии и на то же напряжение, что и ЭП;
- спектр гармоник тока ЭП, включающий основную гармонику и высшие - , причем
до 25 или 40;
- токи, потребляемые вспомогательными элементами с учетом гармоник (если они есть) для каждого источника - .
Эти значения объявляются поставщиком системы для определенных минимальных полных сопротивлений питающей сети (включающий трансформатор, питающий преобразователь) без учета сопутствующих искажений питающего напряжения.
6.1.3 Выходные номинальные данные электропривода
6.1.3.1 Диапазон рабочих скоростей
Диапазон рабочих скоростей характеризуется следующими значениями:
- - минимальная рабочая скорость;
- - базовая скорость;
- - максимальная рабочая скорость.
Поставщики системы и оборудования для ЭП должны скоординировать значения критических скоростей (см. 9.4.1).
6.1.3.2 Номинальные момент и мощность
Должны быть указаны номинальные данные продолжительного режима и возможная перегрузочная способность ЭП в виде продолжительного и перегрузочного момента или мощности на валу двигателя при скоростях, названных выше.
Поставщики системы и оборудования для ЭП должны скоординировать величины пульсаций момента (см. 9.4).
6.1.3.3 Рабочие квадранты
Названные выше номинальные данные должны быть представлены для всех рабочих квадрантов по соглашению между поставщиком и потребителем системы.
6.1.4 Коэффициент полезного действия и потери электропривода
Следует назвать все подсистемы ЭП, включенные в определение общего КПД. Процедура определения представлена в разделе 11.
Примечание - Добавочные потери (например, в системе вентиляции, на возбуждение, управление) включаются в общие потери ЭП, так же как в двигателе с самовентиляцией.
Потери или КПД ЭП приводит поставщик системы при номинальной нагрузке и базовой скорости. Если даны гарантии, они всегда относятся к номинальным величинам и номинальным условиям. В этом смысле приводят следующие допуски на значения потерь:
- вся система: 0%+7%;
- преобразователь: 0%+10%;
- трансформатор и двигатель: 0%+10% в соответствии со стандартом на эти изделия;
- другие компоненты: в соответствии со стандартом на эти изделия (если они есть) или 0%+10% в других случаях.
На рисунке 9 представлен пример зависимости КПД и потерь от скорости.
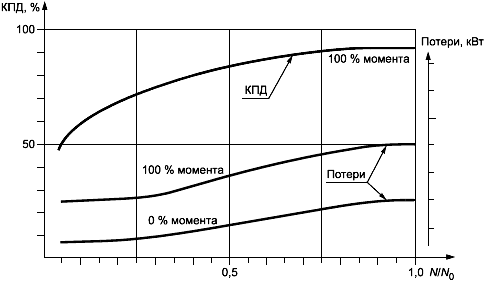
Рисунок 9 - Типичные кривые КПД и потерь ЭП при работе с постоянным потоком
6.1.5 Перегрузочная способность электропривода
Кроме номинального значения при продолжительной нагрузке (см. 6.1.2.2) поставщик системы может назвать дополнительные значения номинального тока, каждое при определенной перегрузке, т.е. различным типам нагрузки могут соответствовать другие номиналы работы преобразовательного оборудования. Перегрузочную способность приводят для номинального диапазона скоростей.
Перегрузочная способность ЭП может относиться к прерывистому или повторяющемуся режиму нагрузки. Более широкая классификация, как и расчетные методы, содержится в МЭК 611361-1*. Специальные перегрузочные условия должны быть согласованы потребителем, поставщиком системы и производителем элементов ЭП.
_______________
* Текст документа соответствует оригиналу. - .
Для примера в таблице 3 МЭК 60146-1-1 даны типичные значения длительности перегрузок.
В любом рабочем цикле действующее значение тока на протяжении всего цикла не должно превосходить номинальный ток. В таблице 5 и на рисунке 10 приведены три обычных примера перегрузки в течение 1 мин в нагрузочном цикле 10 мин.
Таблица 5 - Ограничения по вибрации при транспортировании (см. класс 2М1 МЭК 60721-3-2)
Перегрузка | Пониженная продолжительная нагрузка | ||
Амплитуда | Длительность | Максимальная амплитуда | Длительность |
1,5 | 1 | 0,928 | 9 |
1,25 | 1 | 0,968 | 9 |
1,1 | 1 | 0,988 | 9 |
Рисунок 10 - Пример перегрузочного цикла
В режиме повторяющейся нагрузки основная гармоника номинального тока преобразователя должна соответствовать как минимум действующему значению тока двигателя в течение полного периода цикла работы двигателя, а перегрузочная способность преобразователя будет адекватна рабочему циклу нагрузки.
В продолжительном режиме основная гармоника номинального тока преобразователя должна соответствовать как минимум продолжительному току двигателя, который требуется для создания заданного продолжительного момента. В случае прерывистого режима нагрузки перегрузки не должны приводить к увеличению тока преобразователя сверх номинального перегрузочного значения.
6.2 Преобразователь
6.2.1 Входные номинальные данные преобразователя
Производитель преобразователя сообщает его номинальные входные напряжение и частоту. Стандартными частотами являются 50 или 60 Гц.
Входной номинальный ток дается при номинальном значении линейного напряжения и номинальной нагрузке ЭП:
- действующее значение входного тока преобразователя - ;
- спектр гармоник тока на входе преобразователя включает основную гармонику и высшие - , где
- до 25 или 40.
Эти величины должны быть заданы при минимальном полном сопротивлении линии переменного тока (включая трансформатор).
Если ЭП содержит входной трансформатор, изготовитель привода должен отметить заземление нейтрали трансформатора (на стороне преобразователя) (см. 9.3).
6.2.2 Выходные номинальные данные преобразователя
Диапазон рабочих частот и напряжений при конкретном или типичном выходном полном сопротивлении (включая двигатель и трансформатор, если он есть) должен содержать следующие показатели:
- - номинальное значение основной гармоники выходного напряжения;
- - минимальную рабочую частоту;
- - максимальную рабочую частоту.
Номинальное значение выходного тока дается при номинальном выходном напряжении и номинальной нагрузке ЭП:
- действующее значение полного тока на выходе преобразователя - ;
- спектр гармоник тока на выходе преобразователя, включающий основную гармонику и высшие - , где
- до 25 или 40; эта величина должна быть объявлена поставщиком системы при конкретном или типичном полном сопротивлении на выходе (с учетом двигателя и трансформатора, если он есть), где это необходимо для интеграции системы (см. раздел 9).
Номинальное значение линейного входного напряжения дается при номинальном выходном токе и номинальной нагрузке ЭП:
- действующее значение полного выходного напряжения преобразователя - ;
- спектр гармоник напряжения на выходе преобразователя, включающий основную гармонику и высшие - , где
- до 25 или 40; эта величина должна быть объявлена поставщиком системы при конкретном или типичном полном сопротивлении на выходе (с учетом двигателя и трансформатора, если он есть), где это необходимо для интеграции системы (см. раздел 9);
- время нарастания выходного напряжения преобразователя, где оно необходимо для интеграции системы (см. раздел 9).
6.2.3 Коэффициент полезного действия и потери
Определение КПД преобразования энергии дано в 3.1.6.
Обычно КПД находят расчетным путем, измерениями или их комбинацией (см. раздел 11).
Приборы и оборудование, которые используют для определения КПД преобразователя, должны быть названы. Для исследования одного преобразователя, аппаратуры или компонентов, чьи потери должны или не должны быть учтены, необходима ссылка на список, соответственно включенный в пункты 3.3.1 и 3.3.2 МЭК 60146-1-1. Потери в звене постоянного тока (в реакторах и/или конденсаторах на постоянном токе, предохранителях, если они есть, и шинах), не рассмотренные в пункте 3.3.1 МЭК 60146-1-1, являются частью общих потерь, они должны быть учтены. Если возникают какие-либо сомнения в том, следует ли включать потери в элементах преобразователя в расчет КПД, надо определиться, влияют ли эти потери на объявленное значение КПД.
6.3 Трансформатор
Номинальные данные трансформаторов должны соответствовать продолжительному номинальному режиму и перегрузочной способности системы с преобразователем, как это определено в 6.2.
Дополнительные потери в сердечнике из-за гармоник напряжения, так же как и добавочные потери из-за высокочастотных гармоник тока, тоже следует учитывать надлежащим образом.
Дополнительные сведения см. в разделе 10.
Форму кривой напряжения и ее связь с требованиями к изоляции следует рассматривать в соответствии с 8.2 и 8.4.
Трансформаторы должны отвечать требованиям, изложенным в МЭК 60146-1-3.
6.4 Двигатель
6.4.1 Входные номинальные данные двигателя
Рабочие диапазоны частоты и напряжения при конкретном или типичном значении полного выходного сопротивления (включая сопротивления двигателя и трансформатора, если он есть) сообщает поставщик системы в виде следующих показателей:
- - номинальное значение основной гармоники напряжения двигателя;
- - минимальная частота;
- - максимальная частота.
Диапазоны регулирования частоты и напряжения определяет поставщик системы. Гармоники и время нарастания напряжения на зажимах двигателя обеспечивает поставщик системы (см. раздел 9).
Токи двигателя, которые гарантирует поставщик системы при номинальном напряжении двигателя, базовой скорости и номинальной нагрузке ЭП:
- действующее значение полного тока двигателя - ;
- основная и спектр высших гармоник тока двигателя сообщаются при конкретном или типичном выходном полном сопротивлении (включая сопротивления двигателя и, если он есть, трансформатора и фильтров);
- ток возбуждения двигателя (если он есть);
- ток вспомогательного питания.
Примечание - Дополнительные потери из-за высших гармоник тока следует учитывать, если требуется. Номинальное значение тока двигателя в реальных условиях работы ЭП по этой причине может быть несколько изменено по сравнению с номинальным током двигателя при синусоидальном питании.
6.4.2 Выходные номинальные данные двигателя
Нагрузочная диаграмма (см. 3.4.1) должна быть скоординирована между поставщиком системы, изготовителем элементов ЭП и потребителем. Мощность двигателя как при продолжительной работе, так и при перегрузке должна соответствовать всем требованиям к выходным рабочим характеристикам ЭП.
Номинальная мощность двигателя равна произведению максимального момента в продолжительном режиме и базовой скорости. Она необязательно соответствует максимальной мощности, требуемой нагрузкой (с учетом инерции системы). В особых случаях можно выбрать даже большую номинальную мощность двигателя, чтобы можно было работать с тяжелыми перегрузками или с большим составом гармоники тока.
7 Требования к характеристикам системы
7.1 Характеристики в установившихся режимах
7.1.1 Установившиеся режимы
Система регулирования находится в установившемся режиме, когда опорные и текущие рабочие значения переменных не изменяются в течение времени, более чем в три раза превышающего время задержки в системе регулирования, и регулируемые переменные остаются постоянными более чем в три раза дольше, чем наибольшая постоянная времени оборудования (например, тепловая постоянная времени датчика скорости). Установившиеся значения переменных привода, таких как момент, скорость, положение и т.п., следует определять в соответствии с 7.1.2 и 7.1.3.
7.1.2 Поле значений
Поле значений (см. рисунок 11) - это полный диапазон отклонений регулируемой величины (до тех пор, пока не определены другие переменные) в установившихся режимах, являющихся результатом изменений управляющих или рабочих условий в их установленных пределах.
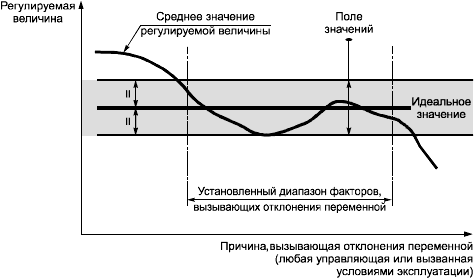
Рисунок 11 - Поле значений
Поле значений измеряется:
a) как процент абсолютного максимума непосредственно регулируемой (или другой назначенной) переменной (см. пример в 7.1.3);
b) как абсолютное число для переменных, которые не имеют легко определяемого базиса, таких как положение в пространстве.
Если нет другого соглашения между поставщиком и потребителем системы, то сигнал, представляющий непосредственно регулируемую переменную, должен фильтроваться фильтром нижних частот первого порядка с 100 мс постоянной времени, для того чтобы устранить из сигнала шум и пульсации.
Примечание - Поле значений нельзя использовать для характеристики явлений, которые не относятся к показателям регулирования в установившихся режимах [например, пульсация момента (см. 8.4.4.4), или колебания скорости, вызываемые пульсациями нагрузочного или электромагнитного момента двигателя (см. 7.2.2.6)].
7.1.3 Выбор поля значений (установившийся режим)
В установившемся режиме характеристики следящей системы будут определяться числом, выбираемым из таблицы 6 (по соглашению могут быть выбраны и другие уровни).
Таблица 6 - Максимальные отклонения, %
±20 | ±10 | ±5 | ±2 | ±1 | ±0,5 | ±0,2 | ±0,1 | ±0,05 | ±0,02 | ±0,01 |
Ему будет соответствовать диапазон значений переменных внутри этого поля (см. рисунок 11).
Пример - В приводе имеется двигатель на 60 Гц, 1780 об/мин, питаемый от преобразователя частоты. Максимальная скорость привода 2000 об/мин и выбранное максимальное отклонение скорости ±0,5%. Условиями эксплуатации будут: диапазон скоростей от 0 до 2000 об/мин, моментов нагрузки - от нуля до номинального. Диапазон окружающих температур от 5 °С до 40 °С.
Таким образом, отклонения действительной скорости от идеального (базового) значения будут ±0,5% от 2000 об/мин, т.е. ±10 об/мин, при этом значения базовой скорости, момента нагрузки и окружающей температуры находятся в выбранных пределах.
Например, если базовая скорость равна 1200 об/мин, действительная скорость двигателя будет (1200±10) об/мин, т.е. между 1190 об/мин и 1210 об/мин.
7.2 Динамические характеристики
7.2.1 Общие положения
Преобразователем может быть обеспечен либо предельный ток, либо ускорение во времени. Если динамические свойства считаются важными (см. приложение В), между потребителем и поставщиком системы должно быть заключено соглашение по поводу приведенных ниже показателей.
7.2.2 Реакция во времени
7.2.2.1 Обзор
Реакция во времени представляет собой зависимость выходного сигнала от времени, появляющуюся при воздействии определенного входного сигнала в определенном режиме и при определенных условиях работы (см. 10.3.4).
Если между потребителем и поставщиком системы нет иных соглашений, то до приложения определенного входного сигнала привод должен работать при следующих условиях:
- базовая скорость вращения;
- отсутствие нагрузки;
- номинальные напряжения и частота;
- температура, которая стабилизировалась после нагревания в течение часа измерительной аппаратуры и соединительных проводов, окружающая температура в пределах условий эксплуатации.
Кривая выходного сигнала может содержать большое количество колебаний, например, из-за работы полупроводниковых приборов преобразователя. При определении времени реакции должна использоваться средняя кривая, представленная на рисунке 12, если нет других договоренностей между потребителем и поставщиком системы.
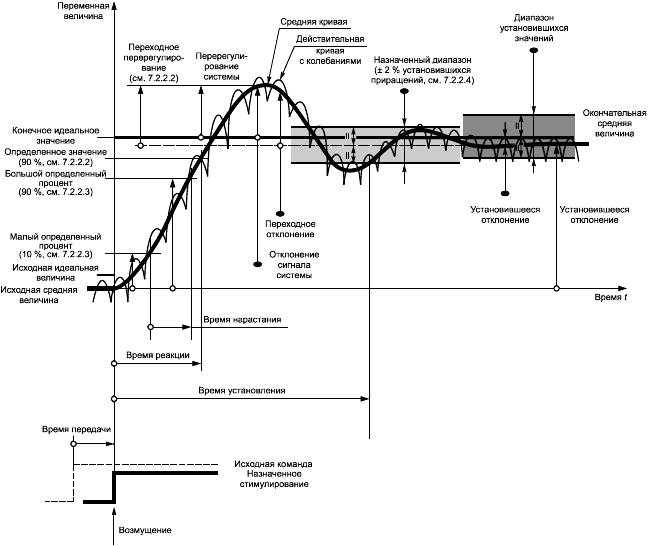
Рисунок 12 - Реакция во времени на скачкообразное изменение типового входа - рабочие показатели не изменяются
Типичная реакция системы электропривода следует во времени за скачкообразным изменением скорости, тока и момента и представлена на рисунке 12, а реакция на изменение момента нагрузки - на рисунке 13. Для определенности момент нагрузки приводимого в движение оборудования считается увеличивающимся линейно от нуля до определенного момента (или снижающимся от определенного момента до нуля) за 100 мс без перерегулирования, если между потребителем и поставщиком не оговорено иное.
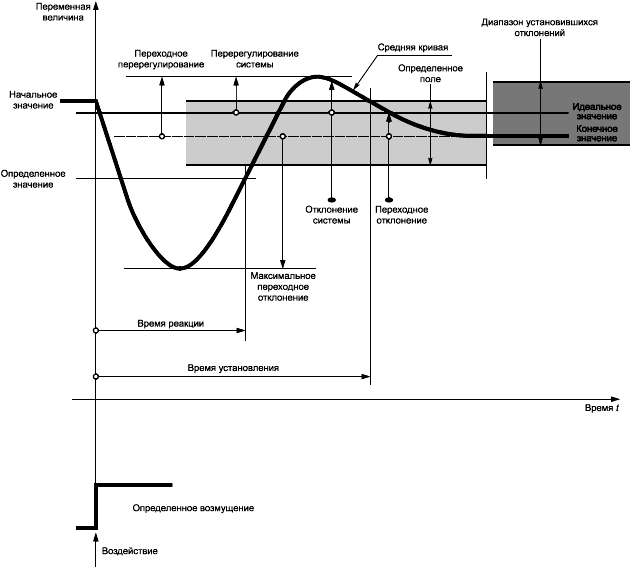
Рисунок 13 - Реакция во времени на изменение рабочей переменной - опорное значение не изменяется
7.2.2.2 Время реакции
Время реакции - это время, которое после воздействия на систему определенного возмущения требуется выходному сигналу, изменяющемуся в направлении необходимого корректирующего действия, чтобы впервые достичь определенной величины.
Определенная величина для времени реакции на скачкообразное изменение определенной входной величины (представлена на рисунке 12) будет исходным средним значением плюс 90% или установившимся приращением. Переходное перерегулирование будет равно или меньше 10% установившегося приращения, если другое не оговорено между поставщиком и потребителем системы.
Для времени реакции, следующей за изменением рабочей переменной (рисунок 13), определенной величиной будет конечное среднее значение плюс 10% от максимальной переходной девиации (отклонения).
7.2.2.3 Время нарастания
Время нарастания - это время, требуемое выходному сигналу системы регулирования для изменения от небольшого определенного процента установившегося значения до большого определенного процента установившегося значения, как до перерегулирования или при отсутствии перерегулирования (см. рисунок 12).
Небольшой определенный процент - это 10%, большой определенный процент - это 90%, а переходное перерегулирование будет равно или меньше 10% установившегося значения, если иное не предусмотрено соглашением между поставщиком и потребителем системы.
Если термин "время нарастания" не узаконен, реакцию на скачок можно понять. В противном случае вид и величина воздействия должны быть оговорены.
7.2.2.4 Время установления
Время установления - это время, требуемое после определенного воздействия на систему названной переменной, чтобы войти и оставаться внутри определенного узкого поля, центром которого является ее конечное среднее значение.
Для временной реакции на скачкообразное изменение входного сигнала (см. рисунок 12) определенным полем будет ±2% установившегося значения, если иное не предусмотрено соглашением между поставщиком и потребителем системы.
Для временной реакции на изменение рабочей переменной (см. рисунок 13) определенным полем будет ±5% максимальной переходной девиации, если иное не предусмотрено соглашением между поставщиком и потребителем системы.
7.2.2.5 Влияние нагрузки на отклонения скорости вращения
Влияние нагрузки на область изменения скорости (соответствующую колебанию положения) дает возможность оценки реакции системы управления скоростью на внезапное изменение момента нагрузки (см. рисунок 13). Для оценки этого влияния имеется формула
![]() ,
,
в которой максимальное переходное отклонение задается как процент от максимальной рабочей скорости. Таким образом, единицей измерения влияния нагрузки на диапазон колебаний скорости вращения является процентная секунда (% с).
7.2.2.6 Коэффициент усиления момента ()
Коэффициентом усиления момента является отношение
![]() ,
,
где - пиковый момент, воздействующий на вал привода после внезапного увеличения момента нагрузки на величину
;
- исходный момент до увеличения нагрузки.
7.2.2.7 Динамическое отклонение
Динамическое отклонение - это разность между опорной (идеальной) величиной и действительным значением, когда опорная величина изменяется с определенной скоростью (см. рисунок 14).
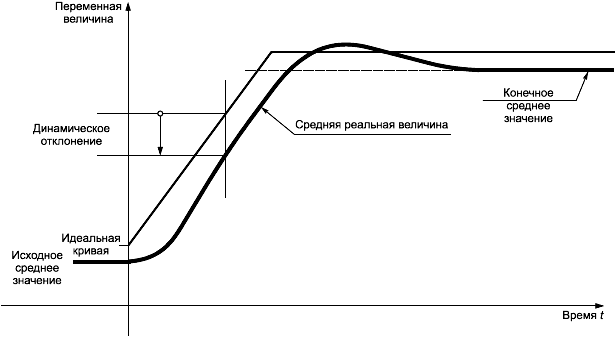
Рисунок 14 - Реакция во времени на изменение опорной величины с определенной скоростью
7.2.3 Частотные характеристики управления
7.2.3.1 Частотный анализ
Частотная характеристика представляет собой отношение амплитуд (коэффициента усиления) и фазового сдвига между регулируемой переменной и синусоидальным возмущением как функцию частоты возмущающего сигнала при замкнутой обратной связи (если она есть).
Примечание 1 - Можно использовать возмущение из многих частот (шум) вместо синусоидального сигнала с переменной частотой, когда экспериментально определяются частотные характеристики с помощью анализатора частот.
Примечание 2 - При оценке усиления принято использовать децибелы (дБ) (см. МЭК 60027-3). Есть формула
 дБ,
дБ,
где ![]() - отношение амплитуд;
- отношение амплитуд;
- коэффициент усиления. Например, если отношение амплитуд равно 0,708, коэффициент усиления равен примерно -3 дБ.
7.2.3.2 Частотный диапазон управления
Ширина диапазона рабочих частот при управлении - это интервал частот, где как коэффициент усиления, так и сдвиг по фазе реакции и возмущения остаются внутри определенных полос с центрами 0 дБ и 0° соответственно (см. рисунок 15). Полосы будут определены как ±3 дБ и ±90°, если иное не было согласовано между поставщиком и потребителем системы.
Рисунок 15 - Частотные характеристики при управлении - базовое значение возмущения
Примечание - На рисунке показан пример, где диапазон регулирования ограничен определенным диапазоном значений фазового сдвига.
7.2.3.3 Чувствительность к возмущениям
Чувствительность к возмущениям - это частотная характеристика усиления, когда возмущением является определенная рабочая переменная. Типичный пример - это чувствительность скорости вращения двигателя к пульсациям момента нагрузки (см. 8.3).
Примечание - Чувствительность можно измерять в децибелах, только если амплитуда регулируемой переменной и амплитуда сигнала возмущения выражены в относительных единицах (о.е.).
7.3 Процесс согласования характеристик интерфейса
7.3.1 Общие положения
Управляющий интерфейс и его характеристики должны быть согласованы поставщиком системы с заказчиком на возможно ранней стадии. Для согласования используется нижеследующий список.
7.3.2 Характеристики аналоговых входов
Согласованные пункты могут включать (хотя список этим не исчерпывается):
- количество аналоговых входов;
- тип аналогового входа, например:
- однопроводный вход напряжения,
- вход дифференциала напряжения,
- вход токового контура;
- уровень допустимого напряжения для изоляции на входе;
- диапазон входного напряжения или тока, зависящий от типа входа;
- входное полное сопротивление (импеданс);
- постоянную времени или частотный диапазон фильтра нижних частот в системе;
- коэффициент усиления и ошибки рассогласования;
- разрешающую способность преобразователя переменного в постоянный ток (если он есть).
Примечание - Более полный перечень см. в МЭК 61131-2.
7.3.3 Характеристики аналоговых выходов
Согласованные пункты могут включать (хотя список этим не исчерпывается):
- количество аналоговых выходов;
- тип аналогового выхода, например:
- однопроводный выход напряжения,
- выход дифференциала напряжения,
- выход токового контура;
- уровень допустимого напряжения для изоляции на выходе;
- диапазон выходного напряжения или тока, зависящий от типа выхода;
- максимальную нагрузку;
- постоянную времени или частотный диапазон фильтра нижних частот в системе;
- коэффициент усиления и ошибки рассогласования;
- разрешающую способность преобразователя постоянного в переменный ток (если он есть).
Примечание - Более полный перечень см. в МЭК 61131-2.
7.3.4 Характеристики цифровых входов
Согласованные пункты могут включать (хотя список этим не исчерпывается):
- количество цифровых входов;
- тип цифрового входа, например:
- релейный вход,
- оптоэлектронное соединительное устройство на входе;
- уровень допустимого напряжения для изоляции на входе;
- номинальное значение напряжения управления и его вид (переменное или постоянное);
- входное активное сопротивление;
- задержку распространения на входе.
7.3.5 Характеристики цифровых выходов
Согласованные пункты могут включать (хотя список этим не исчерпывается):
- количество цифровых выходов;
- тип цифрового выхода, например:
- релейный выход с нормально открытыми контактами,
- релейный выход с нормально закрытыми контактами,
- транзисторный выход нормально открытый;
- уровень допустимого напряжения для изоляции на выходе;
- максимальное напряжение и его вид (переменное или постоянное);
- максимальный ток и его вид (переменный или постоянный);
- операционную задержку выхода;
- задержку распространения сигнала от входа до выхода.
Примечание - Более полный перечень смотри в МЭК 61131-2.
7.3.6 Характеристики каналов связи
Согласованные пункты могут включать (хотя список этим не исчерпывается):
- количество каналов связи;
- тип канала связи, например:
- связующий и поддерживающий канал,
- канал автоматической системы;
- физический вид интерфейса (тип соединения и кабеля);
- используемый протокол;
- максимальную скорость передачи данных в битах за секунду;
- максимальную длину кабеля, который может быть присоединен к каналу;
- максимальное количество линий, которые могут быть присоединены к одному связующему кабелю или к шине системы связи.
8 Основные элементы системы силового электропривода
8.1 Ответственность (см. рисунок 16)
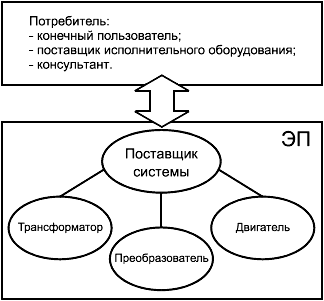
Рисунок 16 - Ответственность поставщика системы
Основной поставщик системы отвечает за:
- пояснение и согласование с потреблением ЭП внешних интерфейсов (см. разделы 7 и 9);
- разъяснение и согласование с потребителем спецификации характеристик ЭП (см. разделы 7 и 9);
- прояснение и договоренность с изготовителями основных компонентов ЭП по поводу их спецификации и приемлемых критериев испытаний.
8.2 Трансформатор
8.2.1 Введение
Этот подраздел посвящен трансформаторам и реакторам в главном силовом канале системы ЭП. Трансформаторы могут быть использованы на стороне силового источника питания ЭП (энергетическая система) или на стороне нагрузки ЭП (двигатель). В задачи трансформаторов входят:
- согласование напряжений;
- изолирование;
- подавление гармоник.
В системах ЭП используются трансформаторы стандартной конструкции, сухие и маслонаполненные. Требования к ним дают уверенность, что они подходят для работы в системах ЭП.
Основные номинальные данные трансформатора должны соответствовать МЭК 60146-1-3.
Трансформаторы, поставляемые как часть силового ЭП, должны иметь номиналы, отвечающие требованиям:
- установившейся нагрузки;
- любых кратковременных перегрузок.
В системах ЭП, которые нормально работают в режиме регулирования скорости вращения, номинальные данные трансформатора должны гарантировать доставку требуемой активной мощности в установившемся режиме. Периодические перегрузки можно использовать для расчета действующего значения полной кажущейся мощности (кВА) нагрузки трансформатора.
8.2.2 Спецификация и номинальные данные
8.2.2.1 Гармоники токов и напряжений
Преобразованные модули вызывают гармоники токов и напряжений, которые являются дополнительной причиной стрессов для соединительных с ними трансформаторов (теплового, воздействие на изоляцию). В конструкции трансформатора особое внимание должно быть уделено:
- добавочным потерям во всех обмотках;
- дополнительным потерям в стали сердечника;
- дополнительным требованиям к изоляции (включающим напряжение обычного режима и увеличенные перенапряжения).
В случаях, когда преобразователь достаточно хорошо фильтруется на стороне трансформатора, можно считать нормальным использование стандартных трансформаторов, полагая, что это допускают требования к изоляции при напряжении обычного режима.
8.2.2.2 Соединение обмоток
В МЭК 60076-1 (приложение D) представлены общепринятые схемы обмоток трансформаторов, обозначения и символы.
Требования (например, фазовый сдвиг, полное сопротивление и схема обмотки) ясно указаны для каждой конструкции трансформатора и назначения установки.
8.2.2.3 Требования к фазовому сдвигу
Подавление гармоник, которое надо достигнуть с помощью многофазного трансформатора и цепей преобразователя, зависит от точности сдвига фаз обмоток. Этот сдвиг обычно оговаривается для частоты основной гармоники. Ошибки в фазовом сдвиге основной гармоники приводят в результате к гораздо большим ошибкам на частотах высших гармоник, чем на основной.
Например, ошибка в 2° в фазовом сдвиге основной гармоники 12-пульсной системы ЭП даст в результате фазовую ошибку (5+1)°·2°=12° для 5-й и (7-1)°·2°=12° для 7-й гармоник. Соответствующие остаточные значения для преобразователя в режиме источника тока будут
![]() и
и ![]() .
.
Для устранения высших гармоник в этих случаях используется 15° фазовый сдвиг со схемами вытянутого треугольника или зигзаг, тогда наибольший интерес представляет 11-я гармоника и 2° фазовая ошибка имеет значительно большее влияние.
Результирующую фазовую ошибку следует поддерживать ниже 2° периода основной гармоники для 12-пульсной схемы трансформатора, так чтобы она включала фазовую ошибку обмоток трансформатора и, очевидно, тиристорной схемы управления.
8.2.2.4 Требования к щитку номинальных данных
Ниже приведены требования, составленные в соответствии с МЭК 60076-1 (пункт 7.1). Перечисленная информация должна сообщаться в дополнение к номинальным данным щитка в соответствии с МЭК 60076-1 (пункт 7.1):
a) тип трансформатора (например, трансформатор для питания преобразователя, выходной автотрансформатор преобразователя и т.п.), характеризующий функцию трансформатора в ЭП;
b) число фаз на входе и выходе в отличие от количества фаз трехфазных обмоток на входе и выходе трансформатора;
c) диапазон номинальной частоты, если она переменна;
d) диапазон номинального напряжения, если оно регулируется;
e) обозначение схемы соединения или сдвиг фаз в градусах.
8.2.2.5 Требования к окружающей среде
Температуру определяют по МЭК 60146-1-3:
- окружающая 40 °С;
- среднесуточная 30 °С;
- среднегодовая 25 °С.
8.2.3 Полные сопротивления
8.2.3.1 Общее положение
Выходные полные сопротивления трансформатора должны согласовываться с гармоническими излучениями и допустимыми аварийными токами; типичный диапазон значений полного сопротивления от 6% до 12% (часто соответствует МЭК 60076).
8.2.3.2 Коммутационное реактивное сопротивление
Коммутационное реактивное сопротивление является важным параметром для преобразователей, коммутируемых линейным напряжением. Способы измерения коммутационного реактивного сопротивления приведены в МЭК 60146-1-3 (пункт 5.1.1).
8.2.3.3 Полное сопротивление преобразователей с самокоммутацией
Коммутационное реактивное сопротивление меньше влияет на характеристики преобразователей с самокоммутацией. Однако полное сопротивление трансформатора существенно ограничивает гармонические составляющие токов и токи короткого замыкания. Для преобразователей с самокоммутацией за полное сопротивление обычно принимают сопротивление короткого замыкания трансформатора, измеренное с помощью стандартных методов испытания трансформаторов (см. МЭК 60076-1, пункт 10.4). Желательно также измерить сопротивление короткого замыкания на представляющей интерес частоте.
8.2.4 Нормальный режим и напряжения постоянного тока
8.2.4.1 Общая информация
Поставщик силового трансформатора должен отметить любые условия эксплуатации преобразователя, которые могут вызвать необычные напряжения на зажимах обмоток трансформатора. Некоторые типы преобразователей могут вызывать искажение напряжений на входе или выходе трансформаторов. Вот две обычные проблемы, которые создают смещение напряжений по фазе:
- перенапряжения на изоляции при обычных напряжениях;
- насыщение сердечника из-за подмагничивания постоянным напряжением или током.
8.2.4.2 Перенапряжения на изоляции при обычных рабочих напряжениях
Обычной причиной возникновения перенапряжения, приложенного к изоляции, является смещение потенциала нейтрали обмотки, присоединенной к преобразователю, когда ключи преобразователя запираются. Тогда нормальное напряжение накладывает более высокое перенапряжение на изоляцию трансформатора. Это нормальное напряжение следует принимать во внимание при определении изоляционного уровня трансформатора или при определении предпочтительного напряжения обычного режима, либо назначая надлежащий уровень стойкости изоляции обмотки, присоединяемой к преобразователю.
В спецификации на допустимое напряжение на изоляции необходимо также учитывать дополнительные перенапряжения, возникающие из-за быстрого времени нарастания напряжения и его отраженных волн (принимая во внимание силовой кабель).
8.2.4.3 Насыщение сердечника из-за подмагничивания постоянным напряжением или током
Преобразователь может создавать напряжения или токи, способные насыщать сердечник присоединенного к нему трансформатора, они могут возникать как на входе, так и на выходе. Проектировщик трансформатора должен быть информирован о величинах постоянных составляющих напряжения и тока, которые могут появиться в трансформаторе, чтобы проект обеспечил его надлежащую работу. Может появиться необходимость выбора более низких значений индукции в сердечнике или введения воздушных зазоров.
В случае последовательного соединения преобразователей необходимо учитывать постоянное напряжение смещения каждого преобразователя.
8.2.5 Специальные требования
8.2.5.1 Системы охлаждения
Соответствуют МЭК 60076-1 и МЭК 60726.
8.2.5.2 Требования к уровню шумов
Можно ожидать повышенный уровень шумов, появляющихся из-за несинусоидальности токов и напряжений.
Ограничения уровней излучаемых шумов и способы очевидно необходимого снижения шума на вторичной стороне трансформатора должны быть согласованы и утверждены изготовителем трансформатора, поставщиком системы и потребителем. Если не предусмотрено иное, способы измерения шумов, излучаемых трансформатором, должны соответствовать МЭК 60070-1.
8.2.5.3 Точность напряжения
Соответствует МЭК 60076.
8.2.5.4 Параллельное соединение мостов
В случае параллельного соединения мостов особое внимание должно быть уделено точности напряжения холостого хода, фазовому сдвигу, полному сопротивлению короткого замыкания каждой вторичной обмотки.
8.2.5.5 Экран между первичной и вторичной обмотками
Рекомендуется использовать электростатический экран, для того чтобы предотвратить передачу высоковольтных переходных напряжений во вторичную обмотку через емкостные взаимные связи. Экран также окажет влияние на электромагнитную совместимость при кондуктивных возмущениях в нормальном режиме работы. По этим причинам индуктивность соединения экрана с землей должна быть небольшой.
8.2.5.6 Требования к режиму короткого замыкания
Преобразователи создают возможность режимов короткого замыкания для преобразователей чаще, чем нормальных режимов. Проектировщик должен осознавать риск короткого замыкания в преобразователе частоты и создавать трансформатор с учетом надлежащих уровней токов короткого замыкания и возникающих частот.
8.3 Преобразователь и контролируемые требования к нему
8.3.1 Цель
Целью являются обеспечение характеристик и удовлетворение требований к преобразователю как части системы силового ЭП. Он содержит собственно преобразователь, который может включать входные и выходные фильтры, цепи управления преобразователя и вспомогательные. В основном это соответствует требованиям МЭК 60146.
8.3.2 Требования к конструкции
8.3.2.1 Степень защиты
Класс защиты определяют согласно МЭК 60529.
8.3.2.2 Коррозийная окружающая среда
Если ожидается загрязнение степени 2, следует принять адекватные меры, обеспечивающие уверенность, что среда остается некоррозийной. Положительное давление чистого воздуха должно поддерживаться вокруг преобразователя или должны использоваться соответствующие воздухоочистители.
8.3.2.3 Охлаждение
8.3.2.3.1 Общие положения
Есть три общепринятых типа охлаждения: длительное воздушное, охлаждение деионизированной жидкостью и испарительное. В критических применениях рекомендуются дополнительные типы охлаждения. Изготовитель преобразователя отвечает за конструкцию системы охлаждения, адекватно учитывающую рабочие циклы, напряжения и токи.
8.3.2.3.2 Воздушное охлаждение
Должна быть предусмотрена фильтрация воздуха, если он содержит частицы, опасные для путей охлаждения преобразователя.
8.3.2.3.3 Жидкостное охлаждение
Если преобразователь охлаждается воздухом, охлаждающая среда должна иметь достаточно высокое сопротивление, чтобы ограничить до безопасного и неразрушающего уровня токи утечки на землю между элементами с различными потенциалами. Результатом мониторинга сопротивления должны быть предупреждающий сигнал или аварийное отключение при низком и очень малом сопротивлении. Чтобы обеспечить адекватную защиту, настоятельно рекомендуется мониторинг потока, температуры воды и ее уровня в резервуаре. Особое внимание следует обращать на ограничение электролитических токов из-за неудачного подбора материалов: например, алюминий и медь не могут быть использованы в одной и той же системе охлаждения.
8.3.2.4 Акустический шум
Уровень шума, измеренного на расстоянии 1 м, должен быть ниже 85 дБА, если другой не предусмотрен соглашением между потребителем и производителем. Соответствие более жестким местным требованиям должно быть согласовано потребителем с поставщиком системы.
8.3.2.5 Силовые соединения
Все силовые соединения должны иметь достаточное рабочее пространство, и разгрузка механических напряжений в точках крепления должна быть обеспечена. Точки экранированных заземлений должны находиться вблизи силовых соединений, когда применяют экранированный кабель.
8.3.2.6 Защиты
Устройство защиты преобразователя соответствует 9.3.
Главные силовые зажимы должны быть четко промаркированы согласно МЭК 60146-1-1. Щитки номинальных данных выполняют согласно МЭК 60146-1-1 и МЭК 60146-2.
Вследствие деликатной природы преобразователей их хранение и транспортирование следует осуществлять согласно 5.2 и 5.3. Изготовитель преобразователя кроме обычных обеспечивает специальными инструкциями, если они требуются.
8.4 Двигатель
8.4.1 Введение
Разработчик системы гарантирует, что при всех реальных условиях ее эксплуатации уровень нагрузки не превысит перегрузочной способности двигателя, а также устанавливает процедуру согласования возможных отклонений от этого условия.
Большинство обычных двигателей переменного тока, применяемых в системах силового ЭП напряжением свыше 1 кВ, входят в эту категорию. Это относится как к двигателям общего назначения стандартной конструкции, так и к машинам специального применения. В дополнение к стандартным рассматриваются также новые технические решения (например, двигатели с постоянными магнитами).
В этой области применения существует много различных типов двигателей. Большинство из них являются асинхронными и синхронными. Количество фаз обычно равно трем или шести. Чаще всего число фаз кратно трем.
Требования к обычно используемым двигателям изложены в стандарте на соответствующую продукцию - МЭК 60034. Настоящий стандарт регламентирует объединение и соединение двигателя с другими элементами в систему силового ЭП.
8.4.2 Требования к конструкции
Если не предусмотрено иное, оболочка (корпус) двигателя соответствует МЭК 60034-5.
Если не предусмотрено иное, система охлаждения соответствует МЭК 60034-6.
Если не предусмотрено иное, способ монтажа соответствует МЭК 60034-7.
Требуется особое внимание к двигателям, питаемым от инверторов (см. МЭК 60034-17). У них при самовентиляции теплопередача в системе охлаждения зависит от скорости вращения, и появляются дополнительные потери от высших гармоник.
Если не предусмотрено иное, температуру внешней и охлаждающей среды, класс нагревостойкости и скорость нарастания температуры изоляции обмотки частотно-регулируемых машин определяют в соответствии с МЭК 60034-1.
8.4.3 Требования к характеристикам
Рабочие характеристики при нормальной работе от преобразователя частоты рассмотрены в 6.2.2 и 6.4.2.
У 3-фазных двигателей иногда может потребоваться прямое присоединение к линейным зажимам вторичной обмотки трансформатора (см. 4.4). Также рассмотрена работа на части обмотки в случае двигателя с несколькими 3-фазными обмотками.
Характеристики и номинальные условия такой работы с байпасом должен определить потребитель, в особенности для:
- получения необходимых пусковых свойств;
- моментов, явно отличающихся от номинальных.
8.4.4 Требования к соединению с механической системой
8.4.4.1 Защита от напряжений, разрушающих вал, или подшипниковых токов
Если между поставщиком и потребителем системы нет иного соглашения, двигатель должен быть снабжен изолированным подшипником со стороны вала, противоположной приводу.
В добавление к рекомендуемой практике заземлений (см. 9.2.3) могут потребоваться другие превентивные меры (см. 9.2.4.6). Они особенно необходимы, когда высокочастотные составляющие присутствуют в напряжении на выходе преобразователя.
8.4.4.2 Излучение акустического шума
По сравнению с режимом питания от сети питание двигателя от преобразователя приводит к увеличению шума (см. МЭК 60034-17). Производитель двигателя должен сообщить ожидаемую величину шума, когда двигатель конкретного применения питается от преобразователя.
8.4.4.3 Вибрации двигателя и резонанс
Если не оговорено иное, допустимые уровни опасных вибраций и методы их измерения следует определять по МЭК 60034-14.
В этой связи поставщик приводимого оборудования, изготовитель двигателя и поставщик системы должны определить и согласовать четкие требования к корректному закреплению двигателя (к фундаменту, центровке и механическим креплениям). Особое внимание следует обращать на боковые резонансные частоты всего механического ряда (см. 9.4).
8.4.4.4 Пульсации момента и учет скручивания
Пульсации электромагнитного момента создаются в двигателе, питаемом от преобразователя гармониками напряжения и тока.
Появляются возмущения или опасные воздействия на элементы механической системы, такие как возбуждение крутильных резонансов двигателя и приводимого в движение механизма, - их следует избегать как при нормальной работе, так и при аварийных условиях.
В процессе проектирования необходимы совместный анализ, скоординированные действия и тесное сотрудничество специалистов по преобразователям, двигателям и приводимым механизмам. Порядок их работы определяет и управляет им поставщик системы ЭП.
8.4.5 Перенапряжения в обмотках двигателя
8.4.5.1 Ответственность
Проектировщик системы гарантирует, что во всех практически возможных условиях работы уровень напряжений не превысит допустимых напряжений для изоляции (см. 8.4.5.2 и 8.4.5.3). Поэтому проектировщик системы отвечает за определение уровня перенапряжений на зажимах двигателя с учетом возможных отражений волн напряжений, зависящих от топологии преобразователя, типа и длины кабеля и т.п. Для перенапряжений, действующих на изоляцию, характерны такие показатели, как величина пикового напряжения в переходном процессе, время нарастания до этой величины, скорость повторяемости пиков и т.п.
В соответствии со спецификацией поставщика системы изготовитель двигателя должен проверить его способность выдерживать перенапряжения. Для уверенности, что не будет уменьшения срока службы изоляции двигателя, действительные перенапряжения из-за работы преобразователя должны быть ниже предела стойкости изоляции обмотки двигателя к перенапряжениям (см. 8.4.5.2 и 8.4.5.3).
8.4.5.2 Виды и предельные значения перенапряжений в обмотках
Существуют три различных вида перенапряжений на изоляции (см. рисунок 17) и возможных пробоев.
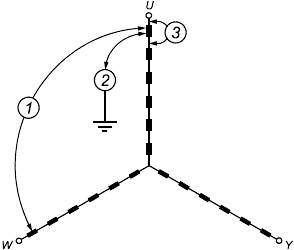
1 - межфазное; 2 - между фазой и землей; 3 - межвитковое
Рисунок 17 - Виды перенапряжений на изоляции
В двигателях, питаемых от сети синусоидальным напряжением низкой частоты, чаще всего случаются пробои изоляции между фазами и между фазой и корпусом. Электрическое напряжение на межвитковой изоляции относительно мало, однако при питании от преобразователя оно может стать очень важным фактором и потребовать повышенного внимания.
При питании от преобразователя на двигатель подается несинусоидальное напряжение, обычно с повторяющимися скачками напряжения, которые вызываются, например, быстрыми переключениями ШИМ-инвертора с относительно высокочастотными пульсациями или коммутационными всплесками на стороне нагрузки тиристорного инвертора (см. А.2.5, приложение А). В случае, когда двигатели получают питание от ШИМ-инвертора напряжения через относительно длинные кабели, каждый переходный скачок напряжения отражается от зажимов двигателя и преобразователя, создавая обычно колебательные выбросы напряжения (рисунок 18).
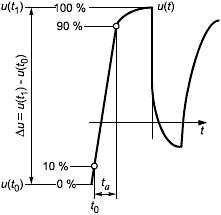
Рисунок 18 - Скачок напряжения при питании от ШИМ-инвертора
Здесь - время нарастания пика напряжения (с учетом влияния упомянутых отражений). Определение
дано в МЭК 60034-17 как времени, в течение которого напряжение изменяется от 10% до 90% предельного переходного значения
с учетом перерегулирования (см. рисунок 18).
Способность изоляции обмотки выдерживать повторяющиеся перенапряжения без снижения срока службы можно охарактеризовать жирными пограничными линиями, приведенными на рисунках 19 а), 19 b) и 19 с). Эти границы показывают допустимые значения импульсов напряжения на зажимах двигателя с учетом отраженных напряжений.
Рисунок 19 - Допустимые импульсные напряжения (с учетом отражения и демпфирования) на зажимах двигателя в функции времени нарастания пика напряжения определяются (цифры на рисунке являются общими ссылками для рисунка 17 и таблицы 7): а) межвитковой изоляцией и конструкцией обмотки; b) основной изоляцией между обмоткой и корпусом; с) основной межфазной изоляцией.
На рисунке 19 представлены:
- тип межвиткового напряжения , сопровождаемый скачками напряжения
![]() при типичном времени нарастания пика
при типичном времени нарастания пика 1 мс [рисунок 19 а)];
- разность потенциалов, вплоть до предельной способности основной изоляции между обмоткой и корпусом (рисунок 19 b), тип перенапряжения );
- разность потенциалов, вплоть до предельной способности основной межфазной изоляции (рисунок 19 с), тип перенапряжения ).
8.4.5.3 Типичная способность выдерживать перенапряжения у двигателей обычной конструкции
В правой графе таблицы 7 приведены значения напряжений, которые могут выдержать высоковольтные двигатели обычной конструкции при типичных допусках на напряжения питающей сети. Эти формулы даны для справок, если нет какой-либо дополнительной информации от изготовителя двигателей. Они дают минимальные значения, но часто предлагаются и значительно более высокие ограничения по напряжению.
Таблица 7 - Наиболее опасные части и типичные предельные напряжения для системы изоляции двигателей
Наиболее опасная часть изоляции | Соответствующее пиковое напряжение | Предельные напряжения 3-фазных двигателей |
|
|
|
|
|
|
|
|
|
| ||
Примечание 1 - Номинальное напряжение системы изоляции (приведено в таблице 7) необязательно равно номинальному напряжению двигателя
, которое дано в 3.1.20.
Примечание 2 - В случае двигателей, питаемых от преобразователя, часто бывает предпочтительно использовать конструкцию двигателя с усиленной системой изоляции, чтобы ![]() (двигателя).
(двигателя).
Примечание 3 - Как показано на рисунке 19 а), межвитковая изоляция первой катушки подвержена наибольшей опасности при допустимых переходных скачках напряжения ![]() в случае относительно короткого времени нарастания пика в интервале 0,1 мс
в случае относительно короткого времени нарастания пика в интервале 0,1 мс![]() 1 мс.
1 мс.
При 1 мс соответствующие ограничения обычно определяются основной изоляцией [рисунки 19 b) и 19 с)].
Примечание 4 - Поскольку переключения полупроводниковых элементов в каждой фазе происходят в разное время, межфазное напряжение и напряжение между фазой и корпусом имеют соответствующие переходные скачки ![]() .
.
8.4.5.4 Функциональная оценка систем изоляции обмоток двигателей
Испытания систем изоляции обмоток, используемых в двигателях на номинальные напряжения свыше 1000 В, проводят в соответствии с МЭК 60034-18-31. Требуется особое внимание к дополнительным стрессовым факторам, создаваемым питающим преобразователем, таким как перенапряжения, скорость повторяемости высокочастотных импульсов, дополнительный нагрев из-за потерь от высших гармоник (см. 11.2.4.4) и механические вибрации (см. 2.4).
8.4.6 Перечень существенных данных
В добавление к щитку номинальных данных двигателя должна быть сообщена следующая информация:
- номинальный момент;
- момент при минимальной скорости;
- минимальная скорость при номинальном моменте;
- минимальная скорость вращения;
- базовая скорость вращения;
- максимальная скорость вращения.
Для надлежащего проектирования и установки двигателя необходима следующая дополнительная информация, поставляемая отдельно (например, в документации на продукцию):
- момент инерции ротора, если требуется, жесткость вала для испытаний на прочность в соответствии с 8.4.4.4 и 9.4;
- дополнительные данные о системе изоляции, такие как номинальное напряжение согласно 8.4.5.3 или альтернативная информация о перенапряжениях и о способности их выдерживать;
- направление вращения и ограничение (если оно есть);
- поток воздуха и требования к окружающей среде для системы охлаждения двигателя;
- полные сопротивления обмоток двигателя (если требуются);
- установочные размеры;
- вал, размеры и балансировка должны соответствовать требованиям МОС/МЭК, если другие не оговорены, балансировочные выточки возможны;
- масса двигателя (ротора, статора);
- инструкции по транспортированию, погрузке и хранению;
- инструкции по безопасности и обслуживанию.
9 Результирующие требования к системе силового электропривода
9.1 Общие условия
9.1.1 Обзор
Система силового ЭП (см. рисунок 20) включает основные подсистемы:
- трансформатор;
- преобразовательную секцию;
- устройства управления и защиты;
- двигатель;
- фильтры гармоник (если необходимы).
Рисунок 20 - Система силового электропривода - напряжение свыше 1000 В
9.1.2 Взаимосвязь между элементами привода
Установка системы силового ЭП, состоящей из ряда основных элементов, там, где ее следует использовать, требует определенных знаний и навыков, с тем чтобы учесть и условия работы самого привода, и воздействие на него местной окружающей среды.
Для приводов с напряжением, превышающим 1 кВ, специальное внимание следует уделять их соединению с внешними элементами, в особенности с:
- источником основного питания;
- основными выключателями;
- главными силовыми кабелями;
- устройствами, обеспечивающими электромагнитную совместимость и понижающими вредные излучения;
- установками в жилых помещениях;
- приводимыми машинами и механизмами;
- дополнительными источниками энергии;
- основными устройствами управления.
При выполнении соединений внутри системы ЭП особое внимание следует обращать на интерфейсы и взаимные помехи в связи с:
- размещением элементов системы;
- требованиями техники безопасности;
- ЭМС согласно внутренним правилам и МЭК 61800-3;
- возможным взаимодействием подсистем.
Поставщик системы дает всю необходимую информацию по правильной установке оборудования и кабельным соединениям. Общие правила компоновки систем ЭП даны в последующих подразделах.
9.1.3 Представляемая информация
Поставщик системы должен дать необходимую документацию потребителю ЭП, позволяющую ему корректно установить привод в типичную систему или встроить в процесс. Потребитель и поставщик системы должны договориться на ранней стадии, если необходимо принять специальные меры для соответствия требованиям ЭМС с конкретной окружающей средой.
Поставщик системы должен иметь следующую информацию:
- полное сопротивление цепи и ее структура (наличие батарей конденсаторов, фильтров и т.п.);
- длины высоковольтных кабелей;
- информация о ЭМС (реальные искажения в сети);
- условия и спецификации заземлений;
- информация о приводимом оборудовании;
- требования по безопасности в соответствии с местными правилами, например, к цветным кодам.
9.2 Интеграция элементов при напряжениях свыше 1000 В
9.2.1 Общая схема (рисунок 21)
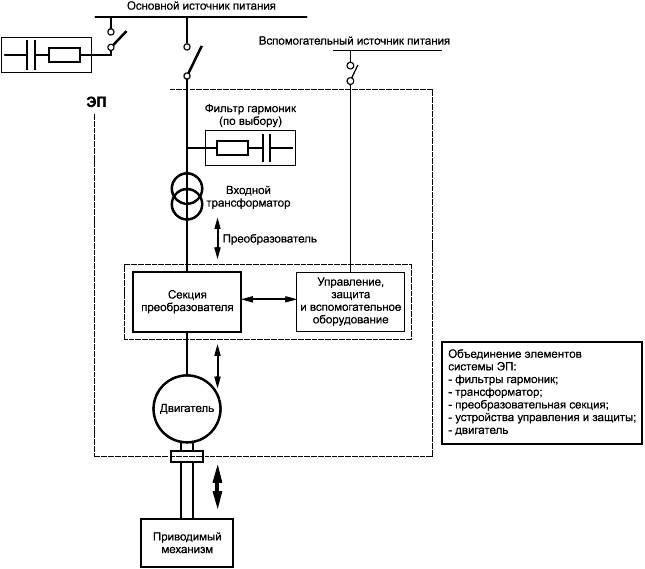
Рисунок 21 - Система силового электропривода
9.2.2 Включение трансформатора в систему
Для трансформаторов основного электроснабжения следует давать дополнительную информацию о защите от перенапряжений [например, поглощение энергии переходных процессов с помощью грозовых разрядников (ГР)].
Энергия неповторяющихся переходных процессов, вызванная коммутациями при холостом ходе основного трансформатора, питающего преобразователь, связана с реактивной энергией намагничивания трансформатора . При допущении о синусоидальности намагничивающего тока энергия, запасенная в контуре намагничивания трансформатора, может быть рассчитана по формуле
![]() ,
,
где - отношение намагничивающего тока к номинальному току трансформатора, о.е.;
- номинальная частота, Гц;
- полная (кажущаяся) мощность трансформатора, ВА.
9.2.3 Требования к заземлениям
9.2.3.1 Перемычки между эквивалентными точками основных компонентов привода
В расчет принимают концепцию заземления в системе привода (заземляющее устройство, заземление, экранирование) с учетом:
- перенапряжений в эксплуатационных режимах, зависящих от точки заземления в системе ЭП;
- требований ЭМС.
Следует рассматривать возможность применения защитных перемычек и эквипотенциальных соединений основных элементов. Обычно необходимо также принять во внимание локальные требования. Концепция защитных соединений должна быть согласована поставщиком с потребителем системы. Она распространяется на всю систему силового ЭП, включая:
- трансформатор;
- основной преобразователь;
- двигатель.
При этом следующие вопросы являются важными:
- материал защитного соединения;
- площадь поперечного сечения соединительных шунтов;
- определение эквипотенциальных точек для соединения.
Все используемые проводящие элементы системы ЭП должны быть присоединены к эквипотенциальной шине (защитному заземляющему проводнику). Там, где защитный проводник не может быть легко идентифицирован по его форме, расположению или конструкции, его следует ясно обозначить в доступном месте графическими символами согласно МЭК 60417-5019 или комбинацией зеленого и желтого цветов.
Каждый основной компонент привода присоединяется к существующей эквипотенциальной шине, монтируемой потребителем. Кроме того, эквипотенциальное шунтирование основных элементов может быть улучшено их непосредственным соединением между собой. Это должно быть согласовано поставщиком с потребителем системы.
Пример с силовыми кабелями показан на рисунке 22.
Рисунок 22 - Пример защитного заземления и соединения основных компонентов
Если оба конца экрана присоединены к защитному заземленному проводнику, следует проверить нагрев экрана циркулирующими токами (обычно наводимыми магнитными полями). Это физическое явление имеет отношение к технике безопасности и ЭМС (см. МЭК 61800-3).
9.2.3.2 Заземление силовой электрической части системы электропривода
9.2.3.2.1 Заземление
Заземления в системе силового ЭП могут быть выполнены в различных точках. Расположение заземлений следует выбирать в соответствии с видом системы: нейтраль общего трансформатора (если он есть), средняя точка общей шины постоянного тока, средняя точка звезды любого выходного фильтра преобразователя частоты или нулевая точка звезды обмотки двигателя.
Сопротивление заземления может быть активным, емкостным или нулевым при прямом соединении. Оно должно быть присоединено к экранированному заземляющему проводнику. Для ЭМС отдельный проводник может быть использован для соединения силовой части привода с заземлением.
Точка и тип заземления вместе с топологией системы силового ЭП (с выходным фильтром или без него) определяют получающиеся в результате перенапряжения на изоляции (см. 8.2).
9.2.3.2.2 Аварийные условия
Поставщик системы отвечает за формирование особых требований к аварийным условиям (согласно МЭК 60204-11), касающихся:
- необходимых взаимных соединений и их минимальных поперечных сечений между основными элементами системы (учитывающими большие аварийные токи);
- токов утечки силовых кабелей.
9.2.3.2.3 Токи утечки
Токи утечки возникают из-за высокочастотных гармоник в выходных напряжениях преобразователя, в том числе в напряжениях нормального режима, а также из-за паразитных емкостей на землю всех кабелей системы и обмоток трансформатора и двигателя. Установившуюся и безопасную практику заземления корпусов трансформатора и двигателя, как оболочек или экранов кабелей, следует соблюдать.
9.2.4 Требования к изоляции устройств, работающих с преобразователями
9.2.4.1 Специфические ограничения
Перенапряжения по отношению к потенциалу земли, приложенные к различному оборудованию, зависят от точки расположения заземления силовой части системы ЭП.
Особое внимание требуется к крутым фронтам и высоким частотам при коммутациях. В таких случаях в типовых системах силовых кабелей возникают отраженные волны напряжения, которые вызывают дополнительные перенапряжения во всех присоединенных силовых элементах ЭП.
Поставщик системы отвечает за то, чтобы указать на возможные перенапряжения на изоляции, принимая во внимание:
- место расположения заземления силовой части системы ЭП и его полное сопротивление;
- характеристики нормального режима;
- отраженные волны напряжения;
- характеристику аварийных ситуаций;
- для основных силовых частей системных ЭП, таких как обмотки трансформатора, преобразователь, силовые кабели, заземление обмотки двигателя, подшипников и вала двигателя.
9.2.4.2 Обмотки трансформатора
Обмотки трансформатора должны быть рассчитаны на изоляционные перенапряжения (пиковые и номинальные значения, время нарастания пика, импульсную частоту, отраженные волны), которые зависят от топологии системы и способа заземления ее силовой части.
Эти величины должны быть включены в спецификацию трансформатора, выполняемую проектировщиком системы силового ЭП.
9.2.4.3 Преобразователь
Преобразователь должен выдерживать расчетные напряжения на изоляции (пиковые и номинальные значения, время нарастания пика, частоту импульсов, отраженные волны), которые зависят от топологии системы ЭП и способа заземления ее силовой части.
С учетом определенных уровней напряжений формируются требования к токам утечки, зазорам, импульсным испытаниям и уровням испытательного напряжения переменного тока (см. 9.2).
9.2.4.4 Силовые кабели
Силовые кабели выбирают в соответствии с расчетными напряжениями на изоляции (пиковыми и номинальными значениями, временем нарастания пиков, импульсными частотами, отражениями), которые зависят от топологии системы ЭП и способа заземления ее силовой части.
Эти величины должны быть включены в спецификацию кабеля, выполняемую проектировщиком системы силового ЭП.
9.2.4.5 Обмотки двигателя
См. 8.4.5.
Выходной фильтр инвертора (если он есть) и изоляция двигателя должны быть спроектированы так, чтобы напряжение на изоляции двигателя всегда находилось в пределах, определяемых 9.3 (с учетом условий номинального режима).
9.2.4.6 Напряжение на валу и подшипники двигателя
См. 8.4.4.1.
В некоторых случаях требуются дополнительные изоляционные меры, такие как:
- полное изолирование вала двигателя от его корпуса путем изолирования всех его подшипников в сочетании с подходящим заземлением вала, чтобы исключить электростатические эффекты;
- изоляционные прокладки, используемые при соединении с приводимым в движение оборудованием.
Рассматривают также возможность использования фильтров, соответствующих топологии инвертора, особенно в случае ШИМ-инвертора в качестве источника напряжения, с помощью:
- фильтров общего назначения;
- ограничения ;
- синусоидального фильтра.
Поставщик системы должен дать совет, если требуются указанные дополнительные меры.
9.2.5 Требования к внутренним силовым соединениям
9.2.5.1 Общие положения
В силовом ЭП возможны многочисленные соединения. Это силовые связи между трансформатором и преобразователем, шины постоянного тока между входным и выходным(и) преобразователем(ями) (если они есть), между преобразователем и двигателем, которые должны быть рассчитаны на передачу энергии с учетом гармонических составляющих тока. В конструкции должны быть приняты во внимание отраженные волны, возможные емкостные связи, магнитные взаимодействия и излучение.
Кабели предпочтительно располагать параллельно, лучше в виде многофазных кабелей. Если таких подходящих кабелей нет, можно использовать одножильные, если многофазная система физически не подходит для каждого элемента параллельных кабелей.
9.3 Защитные соединения
Система силового ЭП должна содержать необходимые защитные функции, защиту отдельных ее компонентов и высококачественную общую защиту системы. Хорошо спроектированная защита предохраняет от внутренних и внешних воздействий. Она должна включать защиты, перечисленные в таблице 8.
Таблица 8 - Защитные функции системы силового ЭП
Питающая линия | Сигнал тревоги | Отключение | Замечание |
Отключение, потеря фазы | x | x | |
Повышение напряжения в линии | x | x | |
Понижение напряжения в линии | x | x | |
Несимметрия линейного напряжения | x | x | |
Линейный фидер | Сигнал тревоги | Отключение | Замечание |
Сверхток | x | ||
Перегрузка | x | x | |
Трансформатор | Сигнал тревоги | Отключение | Замечание |
Газовое реле (Бухгольца) | x | x | Только в масляных |
Превышение температуры | x | x | |
Исчезновение охлаждающего агента | x | x | |
Низкий уровень масла | x | Только в масляных | |
Преобразователь | Сигнал тревоги | Отключение | Замечание |
Перегрузка по току | x | x | Коммутационное повреждение, короткое замыкание и т.п. |
Перегрузка | x | (х) | Тепловая |
Перенапряжение | x | x | |
Замыкание на землю | x | (х) | |
Потеря охлаждения | x | (х) | |
Превышение температуры | x | (х) | |
Исчезновение вспомогательного электроснабжения | x | x | |
Потеря связи в системе управления | x | (х) | |
Исчезновение сигнала обратной связи по скорости | x | ||
Двигатель | Сигнал тревоги | Отключение | Замечание |
Повышение/понижение напряжения на двигателе | x | x | |
Перегрузка двигателя по току | x | x | |
Перегрузка | x | (х) | Тепловая |
Опасное превышение скорости | x | x | |
Превышение температуры обмотки | x | x | |
Перегрев подшипника | x | x | |
Высокая вибрация | x | x | |
Потеря охлаждения | x | x | |
Отсутствие смазки | x | (х) | |
Примечание 1 - Функция защиты от вибраций может быть вменена поставщику оборудования, приводимого в движение электроприводом. | |||
Требование к защите и набор мер обычно возрастают с увеличением мощности системы ЭП. Для крупных или ответственных приводов в помощь потребителю рекомендуется система диагностики.
9.4 Соединения с оборудованием, приводимым в движение
9.4.1 Критические скорости
Поставщик и потребитель системы вместе с поставщиком приводимого механизма должны договориться о расчете результирующих критических скоростей всей механической цепи ЭП и об учете местных требований по этому вопросу (см. 8.4.4.3). Особое внимание должно быть обращено на:
- влияние жесткости подшипникового узла и фундамента;
- то, как избежать продолжительной работы с недостаточным демпфированием вблизи критических скоростей (±20%).
Продолжительная работа при критических скоростях возможна при наличии активных подшипников (т.е. магнитного подвеса).
9.4.2 Анализ кручений
Анализ кручений является важным элементом проектирования системы силового ЭП и приводимого в движение оборудования, чтобы проверить крутильные напряжения во всей механической цепи, в особенности в таких условиях работы, как:
- пуск;
- однофазное или 3-фазное замыкание на зажимах двигателя;
- влияние возможных коммутационных неисправностей в преобразователе;
- влияние гармонических составляющих момента в установившихся режимах.
Анализ кручений в системе силового ЭП и приводимом механизме рекомендуется в случаях, когда есть риск возникновения резонанса между инерционными частями двигателя и приводимого оборудования. Более всего это относится к следующим ситуациям:
- где инерция приводимого механизма больше половины инерции двигателя, в действительности риск возникновения больших напряжений кручения возрастает с увеличением инерции приводимого в движение оборудования (по сравнению с инерцией двигателя);
- когда коммутационные неисправности в преобразователе могут вызвать динамические моменты более высокие, чем при 3-фазном коротком замыкании двигателя;
- когда какая-нибудь составляющая электромагнитного момента двигателя с частотой ниже 100 Гц превысит 1% номинального момента в установившемся режиме или при пуске;
- в любой системе привода мощностью свыше 5 МВт;
- когда используются длинные валы и/или сложная конфигурация механической части привода.
Для анализа кручений поставщик системы предоставляет:
- пульсации электромагнитного момента с его гармоническими составляющими во всем диапазоне скоростей вращения;
- чертеж вала с информацией о свойствах материала со стороны привода.
Для анализа кручений поставщик производимого оборудования предоставляет:
- информацию о любых возможных пульсациях нагрузочного момента (включая его гармонические составляющие) во всем диапазоне скоростей вращения;
- чертеж вала с информацией о свойствах материала.
10 Испытания
10.1 Проведение испытаний
Проведение испытаний и требования к ним должны быть согласованы в контрактных документах. В их разделах предусмотрены различные типы испытаний. Индивидуальные испытания главных элементов ЭП, т.е. двигателей, трансформаторов и преобразователей, проводят так, как предусмотрено соответствующими стандартами МЭК. В этих стандартах представлены особенности дополнительных испытаний системы ЭП в целом, регулирования скорости вращения, высших гармоник и т.п.
Обычно типовые испытания требуются только одному образцу привода. Однотипные испытания проводят на всех образцах. Если результаты типовых испытаний для идентичных образцов уже существуют, то поставщик системы должен предоставить протоколы испытаний в своем извещении о товаре.
Специальные испытания, такие как комбинированные (см. 3.6.4) и приемные испытания следует согласовывать в контракте.
В контракте также должно быть соглашение по поводу экспериментального определения потерь и КПД отдельных устройств и системы в целом, как в разделе 11.
Испытания обычно проводит поставщик системы до отгрузки. Другой порядок следует согласовывать до заказа.
Испытания в присутствии заказчика должны быть оговорены в его заявке. Если не предусмотрено иное, поставщик системы должен известить потребителя или его доверенных представителей по крайней мере за 10 рабочих дней о всех испытаниях в присутствии заказчика. Поставщик системы не должен продолжать какие-либо испытания в присутствии заказчика, если он или его представитель не принимает результатов или отказывается от испытаний. Поставщик системы должен также вовремя проинформировать заказчика о других испытаниях, предусмотренных в контракте. Потребитель решает, будет ли он или его представитель присутствовать. В любом случае поставщик системы может продолжить испытания.
10.2 Содержание испытаний отдельных компонентов системы силового электропривода
10.2.1 Перечень стандартных испытаний компонентов системы силового электропривода
Таблица 9 - Стандартные испытания компонентов системы силового ЭП
Элемент системы ЭП | Стандарт МЭК |
Фильтр гармоник | МЭК 60146-1-3 |
Трансформатор | МЭК 60146-1-3, раздел 5; МЭК 61378-1 |
Двигатель | МЭК 60034-1, МЭК 60034-2 |
Преобразователь | См. таблицу 10 |
Управление и защита | См. таблицу 10 |
Примечание 1 - Если гармонический фильтр должен быть испытан в условиях, отличающихся от тех, на которые он рассчитан, следует добавить условия его настройки и нагрузки.
Примечание 2 - Если выполняют испытание системы на нагрев при полной нагрузке для того, чтобы определить КПД и закон нарастания температуры, для этих целей не требуются индивидуальные испытания трансформатора и двигателя.
Типовые испытания фильтра (если он используется) должны подтвердить, что его характеристики соответствуют требованиям. Этот тест также покажет, что рассчитанным значениям соответствуют максимальные напряжения, токи и температура.
Примечание 3 - Обычно требуются дополнительные приемо-сдаточные испытания.
Примечание 4 - Фильтр может быть общезаводским.
Если это возможно, то температуру нагрева оборудования желательно определять в режиме полной нагрузки с учетом реальных гармонических искажений тока и напряжения (см. 10.3).
Если типовые испытания трансформатора основываются на методе раздельных потерь в соответствии с МЭК 60076 или МЭК 60726, которые учитывают только основную гармонику, адекватный запас по потерям и температуре из-за действительных гармонических составляющих должен быть документирован. Этот запас на потери и температуру можно теоретически рассчитать заранее до испытаний.
Все испытания, предусмотренные в МЭК 60076 и МЭК 60726, применимы также к трансформатору преобразователя, если это не противоречит опытам, рассмотренным в предыдущем разделе.
Потери и температуры, названные выше, должны быть рассчитаны при номинальном значении основной гармоники тока и максимально возможном искажении синусоидальности тока.
Испытания, предусмотренные МЭК 60146-1-3 (раздел 5), следует рассматривать как специальные тесты, применимые к трансформатору.
Отдельные испытания двигателя в соответствии с МЭК 60034 не гарантируют требуемое функционирование системы силового электропривода приводимого им оборудования. Пульсации и гармонические искажения должны быть либо определены экспериментально при питании двигателя от преобразователя, подобного тому, с которым он поставляется, или в предоставляемой информации.
В последнем случае поставщик системы должен предоставить информацию о том, как учесть все явления, оказывающие влияние, например:
- пульсирующие составляющие электромагнитного момента и момент инерции ротора, требуемые для анализа скручивания;
- добавочные потери для определения КПД;
- общее превышение температуры;
- дополнительный акустический шум.
Примечание 5 - Если двигатель имеет две 3-фазные обмотки с 30° фазовым сдвигом, следует определить эквивалентные испытательные напряжения и ток.
На основе графика нагрузки системы силового ЭП определяется перегрев двигателя при номинальной скорости вращения, при базовой скорости, когда привод работает при постоянной мощности, и при максимальной скорости, если она отличается от номинальной. На основе результатов этих измерений принимается решение о том, продолжать ли испытания благодаря системе охлаждения, которая снимает потери, и/или требуется ли метод наложения для учета дополнительно создаваемых потерь.
10.2.2 Стандартные испытания и контроль преобразователя
10.2.2.1 Обзор
Таблица 10 - Стандартные испытания преобразователя как элемента электропривода
Измеряемая величина и объект | Типовые испытания | Обычная проверка | Специальный тест | Сертификационный документ |
Изоляция (см. примечание 1) | x | x | МЭК 60146-1-1, пункт 4.2.1 | |
Работа с недогрузкой (см. примечание 2) | x | x | МЭК 60146-1-1, пункт 4.2.2 | |
Номинальный ток/выход | x | МЭК 60146-1-1, пункт 4.2.3 | ||
Перегрузка по току (см. примечание 3) | x | МЭК 60146-1-1, пункт 4.2.12 | ||
Распределение тока | x | См. 10.2.2.3 | ||
Распределение напряжений | x | См. 10.2.2.3 | ||
Межфазные пульсации напряжения и тока | x | МЭК 60146-1-1, пункт 4.2.15 | ||
Определение потерь (см. приложение С) | x | МЭК 60146-1-1, пункт 4.2.4 | ||
Превышение температуры (см. примечание 4) | x | МЭК 60146-1-1, пункт 4.2.5 | ||
Измерение регулируемого напряжения | x | МЭК 60146-1-1, пункт 4.2.8 | ||
Проверка вспомогательных устройств | x | x | МЭК 60146-1-1, пункт 4.2.7 | |
Проверка свойств оборудования управления | x | x | См. 10.2.2.2 и примечание 2 | |
Проверка устройств защиты | x | x | МЭК 60146-1-1, пункт 4.2.10 | |
Звуковой шум (специальный тест) | x | МЭК 60146-1-1, пункт 4.2.14 | ||
Коэффициент мощности | x | |||
Дополнительные испытания | x | МЭК 60146-1-1, пункт 4.2.16 | ||
Примечание 1 - Испытание изоляции можно проводить при коротком замыкании силовых полупроводниковых устройств. Изготовитель этих компонентов должен иметь раздельно проверенный уровень стойкости их изоляции. | ||||
10.2.2.2 Функциональный контроль изоляции
При испытаниях изоляции преобразователя должны быть приняты во внимание максимальные переходные и установившиеся пики напряжения.
Функциональные испытания должны включать по крайней мере следующие:
- пуск и разгон до минимальной рабочей скорости вращения в соответствии с графиком нагрузки;
- установившуюся работу при нескольких уставках скорости вращения, включая, если возможно, номинальную скорость и максимальную, если она отличается от номинальной;
- непрерывное ускорение и замедление торможением между вышеупомянутыми рабочими скоростями.
Примечание - Для этих испытаний может потребоваться некоторое дополнительное увеличение момента инерции.
Испытания при номинальном и перегрузочном токах могут быть выполнены как часть испытаний системы в целом (см. 10.3) или как специальные испытания оборудования, при которых потребуется соответствующее оборудование для нагружения преобразователя.
Обычная проверка управляющих функций и оборудования может быть сделана с испытательным двигателем меньшей мощности и при соответствующем масштабировании измерительных устройств. Испытания при недогрузке (см. 10.3.3.3 или таблицу 10) также дают представление о некоторых функциях управления. При надлежащем масштабировании можно определить предел по току, так же как и ускорение и замедление, если требуется.
Типовые испытания устройств управления можно выполнить, используя двигатель с более низкими номинальными данными.
10.2.2.3 Защита и специальные сведения
Простая проверка функций и устройств защиты может быть сделана посредством имитации аварии, вызванной работой соответствующих ключей.
Для типовых испытаний защитных функций поставщик системы должен предложить надлежащую программу испытаний.
Распределение токов. Если в системе ЭП используется параллельное соединение силовых полупроводниковых приборов и/или преобразователей, следует проверить распределение токов между ними. Тест проводят при номинальном значении выходного тока.
Вот реальные случаи:
- входной выпрямитель и/или инвертор при 12-пульсной конфигурации;
- статор двигателя с двумя параллельными обмотками (при 6-фазной конфигурации).
Когда баланс токов нормальный, это дает уверенность, что ни одно из устройств не будет перегружено при наихудших условиях (пределы определяют допусками для компонентов, запасами, заложенными при проектировании, условиями обслуживания и т.д.). Эти расчетные пределы должны быть указаны до начала испытаний.
Распределение напряжений. Если два или более силовых полупроводниковых приборов и/или преобразователей соединены последовательно, следует проверить распределение напряжений между ними. Распределение напряжений должно быть адекватным для обеспечения уверенности, что ни одно из устройств не будет перегружено сверх расчетных величин при самых худших условиях (пределы определяют допусками для компонентов, запасами, заложенными при проектировании, условиями обслуживания и т.д.). Эти расчетные пределы должны быть указаны до начала испытаний.
10.2* Испытания системы электропривода
10.3.1* Общие положения
_______________
* Нумерация соответствует оригиналу. - .
Испытания системы ЭП являются специальными, выполняемыми по соглашению до тех пор, пока иное не оговорено проектом стандарта (Таблица 11). Если это сделано, некоторые из них заменят испытания, описанные в 10.2.
Требуется обеспечить нагрузку: приводимое в движение оборудование, калиброванная нагрузка или другое специальное нагрузочное устройство. Если необходимо измерить КПД, эта нагрузочная машина должна быть калибрована. Если имеются две системы ЭП, можно применить метод взаимного нагружения. Для определения КПД см. раздел 11. Программа испытаний системы силового ЭП представлена в таблице 11.
Таблица 11 - Испытания системы электропривода
Статические характеристики | Примерный стандарт или разделы спецификации |
Испытание с частичной нагрузкой | 10.3.3.1 |
Испытания по нагрузочной диаграмме | 10.3.3.2 |
Испытание в режиме с перемежающейся нагрузкой | 10.3.3.3 |
Испытание при полной нагрузке с допустимым током | 10.3.3.4 |
Тепловые испытания | 10.3.3.5 |
КПД | 10.3.3.6 и раздел 11 |
Состав кривой искаженного линейного тока | 10.3.3.7 |
Коэффициент мощности | 10.3.3.8 |
Проверка вспомогательных устройств | 10.3.3.9 |
Проверка соответствия устройств защиты | 10.3.3.10 |
Проверка свойств при необычных условиях обслуживания | 10.3.3.11 |
Изолирование от подшипниковых токов между валом и подшипниками | 10.3.3.12 |
Звуковой шум | 10.3.3.13 |
Пульсация момента | 10.3.3.14 |
Вибрация двигателя | 10.3.3.15 |
Испытания на электромагнитную совместимость | 10.3.3.16 и МЭК 61800-3 |
Динамические характеристики | 10.3.4 |
Определение предельного тока и испытание контура тока | 10.3.4.1 |
Испытание контура скорости | 10.3.4.2 |
Автоматическое повторное включение и ускорение | 10.3.4.3 |
10.3.2 Схема испытаний
На рисунке 23 представлена схема, по которой непосредственно измеряют физические переменные или их рассчитывают по результатам измерений:
- - напряжение;
- - ток;
- - скорость вращения;
- - момент;
- - температура;
- - реактивная мощность, и др.
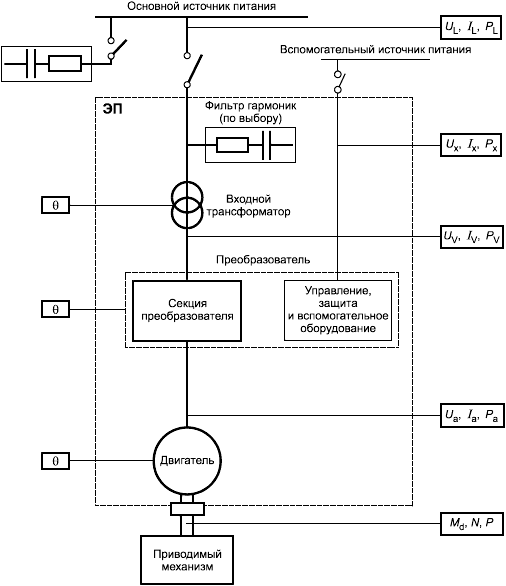
Рисунок 23 - Точки измерения для испытания системы ЭП
Кроме этого, могут быть измерены вибрации и интерференция сигналов.
Примечание - Если определяется КПД, большое внимание следует обратить на подбор измерительных приборов. Они должны измерять реальные действующие значения в достаточных диапазонах, включая гармоники до 40-го порядка, с точностью, достаточной для измерения потерь с отклонениями от истинных значений не более 10% (см. также раздел 11).
10.3.3 Опытное определение статических характеристик
10.3.3.1 Испытание при недогрузках
Чтобы обеспечить возможность проверки системы управления приводом, вал двигателя соединяется с нагрузкой. По договоренности поставщика системы с потребителем может быть проведен опыт холостого хода.
Примечание - Нагрузкой может быть приводимое оборудование или его имитация.
10.3.3.2 Определение характеристик под нагрузкой
Измерения должны быть проведены по крайней мере при минимальной скорости вращения и при номинальной скорости с верхним моментом на нагрузочной диаграмме, а также при максимальной скорости и максимальном моменте, если он не идентичен номинальному. При этом измеряются следующие величины:
- напряжение , ток
и мощность
на выходе трансформатора;
- напряжение , ток
и мощность
на входе преобразователя;
- напряжение , ток
и мощность
на входе двигателя;
- температура каждого компонента.
Примечание 1 - Поставщик и покупатель системы должны договориться, где проводить это испытание: на заводе, при вводе в эксплуатацию или в другом пригодном для испытаний месте.
Примечание 2 - Если данные этого опыта используют также для расчета потерь и КПД, в разделе 11 даны сведения о приборах и методах расчета.
Примечание 3 - Нагрузкой может быть приводимый механизм, нагрузочная машина или такой же привод в режиме взаимной нагрузки.
10.3.3.3 Испытание при нагрузке
Этот опыт имеет смысл, если потребитель определил рабочий цикл перемежающейся нагрузкой. Двигатель должен быть соединен с нагрузочным устройством, способным обеспечивать требуемый график нагрузки в продолжительном режиме, чтобы убедиться, что установившаяся температура всех элементов оборудования достигает допустимых национальных значений.
10.3.3.4 Зависимость допустимого полного тока от скорости вращения
В этом опыте устанавливается ток и, следовательно, соответствующий ему момент, выше ранее определенного предела нагрузки. Опыт базируется на данных расчетов поставщика системы и должен подтвердить, что при имеющихся условиях охлаждения температура нагрева все еще находится внутри оговоренных пределов.
10.3.3.5 Испытания на нагрев
Испытания на нагрев являются частью исследования рабочих характеристик (см. 10.3.3.2). Опыты по испытаниям на нагрев следует продолжать, пока не стабилизируются все температуры.
10.3.3.6 Коэффициент полезного действия
См. 6.1.3 и раздел 11.
10.3.3.7 Гармонический состав линейного тока
Это измерение проводят по методике и с помощью приборов, представленных в МЭК 61000-4-7, предпочтительно при номинальных условиях работы. Измерять следует гармоники по крайней мере до 40-го порядка.
Величины при коротком замыкании в силовых цепях должны быть определены экспериментально и отмечены в протоколе испытаний.
Если в приводе предусмотрен специальный фильтр, он должен быть подключен во время опыта.
10.3.3.8 Коэффициент мощности
Измерение коэффициента мощности выполняется как часть экспериментального определения рабочих характеристик (см. 10.3.3.2).
10.3.3.9 Проверка вспомогательных устройств
Функции всех вспомогательных устройств, которые не испытываются полностью, должны быть проверены. Вот примеры таких устройств: вентиляторы двигателей, смазка, внешние выключатели и т.п.
Примечание - Если удобно, это можно сделать при выполнении опыта неполной нагрузки (см. 10.3.3.1).
10.3.3.10 Проверочная координация устройств защиты
Проверка этих устройств должна быть сделана, насколько это возможно, без перегрузки элементов оборудования сверх номинальных величин переменных. Рекомендуется устанавливать их пониженные значения, чтобы не создавать перегрузок.
Так как существует широкое многообразие защитных устройств, следует разработать детали испытаний. Как минимум, они должны включать:
a) проверку функций аварийной остановки, если она применяется;
b) тест/моделирование всех функций сигнализации и особенно предупреждения о:
- превышении скорости,
- возникновении перенапряжения,
- перегрузке;
c) исчезновение обратной связи по скорости;
d) замыкание на землю;
e) проверку функций ограничения тока/момента.
10.3.3.11 Проверка свойств при необычных условиях эксплуатации
Необычными условиями эксплуатации обычно являются условия окружающей среды, такие как температура, влажность, повышенное содержание солей в воздухе, высота и другие, выходящие за пределы, определяемые стандартами МЭК на соответствующее оборудование.
Такие условия могут требовать специальную конструкцию, номинальные характеристики или дополнительные защитные покрытия и другое, потребителю это следует указать в его заявке. Корректирующие меры и испытательные критерии следует оговорить в контракте.
10.3.3.12 Изолирование от токов через вал и подшипники
Токи через вал могут появляться в нормальных режимах и из-за гармоник напряжения и тока в двигателе. Хотя и небольшие по величине, они могут вызывать повреждения подшипников качения и скольжения. Экспериментальные методы обнаружения их присутствия должны быть согласованы поставщиком и потребителем системы.
10.3.3.13 Звуковой шум
Опыты по его исследованию проводят в соответствии с ИСО 1680 и МЭК 60034-9.
Примечание - Для понижения уровня шума может потребоваться внешний подавляющий его кожух.
10.3.3.14 Пульсации момента
Уровни относительных пульсаций электромагнитного момента можно измерить при холостом ходе, используя результаты измерений скорости и/или тока, если нет в наличии подходящих чувствительных и динамичных измерительных устройств. В идеале пульсации электромагнитного момента в каждой конкретной системе ЭП должны измеряться при известном моменте инерции нагрузки, соответствующем значении нагрузочного момента с помощью механически присоединенного к валу датчика момента. По результатам измерений можно рассчитать пульсации электромагнитного момента.
10.3.3.15 Вибрации двигателя
Вибрационные испытания следует проводить в соответствии с МЭК 60034-14 и при тех же нагрузках, которые даются при снятии рабочих характеристик (см. 10.3.3.2).
10.3.3.16 Испытания на электромагнитную совместимость (ЭМС)
Тесты на ЭМС описаны в МЭК 61800-3.
10.3.4 Экспериментальные исследования динамических характеристик
10.3.4.1 Предельный ток и обратная связь по току
Эти опыты характеризуют динамические свойства преобразователя или привода вне зависимости от приводимого в движение оборудования.
Задается скачкообразное изменение нагрузки или сигнала, задающего скорость так, чтобы ток преобразователя достиг предельной установленной точки. Время нарастания тока, величина перерегулирования, длительность процесса и демпфирующие характеристики могут быть проанализированы на предмет соответствия требованиям.
Частотный спектр и гармонический анализ замкнутой системы могут быть использованы для установления соответствия между уставкой по току и измеренной кривой тока при наличии обратной связи.
Эти эксперименты следует проводить при тех же скоростях вращения, что и при снятии рабочих характеристик (см. 10.3.3.2).
10.3.4.2 Контур скорости вращения
Скачок в задании скорости при холостом ходе или небольшой нагрузке корректно выбирается и задается, чтобы измерить изменение скорости. Скачок не должен влиять на предельный ток.
Можно подать небольшой скачок нагрузки, чтобы измерить зависимость изменения скорости от нагрузки. Этот скачок не должен влиять на предельный ток.
Эти эксперименты следует проводить при тех же скоростях вращения, что и при снятии рабочих характеристик (см. 10.3.3.2).
10.3.4.3 Автоматическое повторное включение - повторный разгон
Эти функции следует проверить, если они оговорены заказчиком.
10.3.5 Испытание методом взаимной нагрузки
В этом опыте требуется вторая система силового ЭП с аналогичными характеристиками. В опыте взаимной нагрузки одна система ЭП работает в двигательном режиме, а другая работает генератором. На рисунке 24 показана схема опыта взаимной нагрузки.
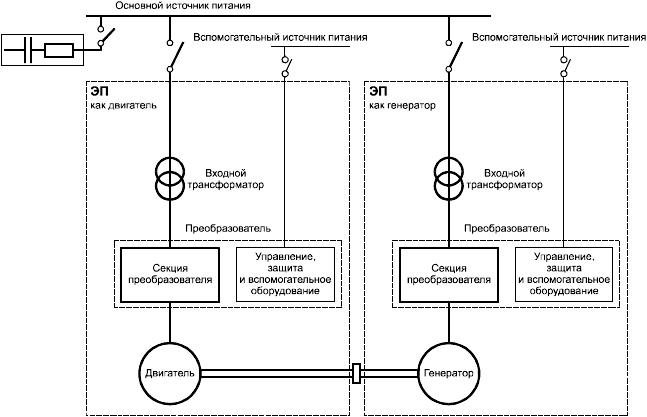
Рисунок 24 - Опыт взаимной нагрузки
10.3.6 Опыт при нулевом коэффициенте мощности
По соглашению между поставщиком и потребителем системы для преобразователей в режиме источника тока может быть проведен опыт при нулевом коэффициенте мощности вместо испытаний реальной системы ЭП.
Опыт при нулевом коэффициенте мощности проводят так, чтобы преобразователь питал номинальным или большим током ненагруженный испытуемый синхронный двигатель при нулевом коэффициенте мощности. В этом случае с помощью соответствующих практических экспериментов могут быть обеспечены нагрузка преобразователя номинальным током, определение перегрузочной способности, температуры и потерь, проверка свойств регулирующей аппаратуры и устройств защиты.
11 Определение коэффициента полезного действия
11.1 Общие положения
Для определения результирующего КПД привода можно использовать два подхода: метод раздельных потерь и испытание системы при полной нагрузке. В первом подходе по отдельности определяются потери в каждом элементе системы как сумму индивидуальных видов потерь в предположении об идеальной синусоидальности переменных, так как предписано соответствующими стандартами МЭК (см. таблицу 9), затем результат складывают с добавочными потерями из-за несинусоидальных форм кривых напряжений и токов. Результирующие потери в системе ЭП являются суммой потерь в ее отдельных компонентах.
Второй подход позволяет определить реальные потери в системе, которая уже собрана для работы в реальных условиях, для которых она предназначена. Для реализации этого подхода применимы два метода:
a) определение потерь прямым измерением входной и выходной мощностей. Этот метод требует очень точных измерений мощностей во входной и выходной секциях системы (или в каждом из элементов, если требуется), выходную мощность можно измерить с помощью калиброванной нагрузочной машины (см. 11.3).
b) прямое измерение потерь. Это измерение может быть проведено в основном в опыте взаимной нагрузки, если это возможно (см. 10.3.5), или калориметрическим методом.
Прямое измерение потерь по методу b дает более точные результаты и является предпочтительным для высокоэффективных систем.
Поставщик и потребитель системы в контракте должны оговорить метод, который следует использовать, и нагрузочные точки, в которых следует проводить измерения.
Общей формулой КПД как отдельных элементов системы, так и всего комплектного привода является:
![]() ;
;
![]() ;
;
![]() .
.
Выбор из этих трех формул определяется имеющимися в наличии данными для измеренных точек. Вообще более высокая точность получается при определении отдельных потерь при использовании второй или третьей формулы. В этом случае обычно пренебрегают потерями в кабелях, так как поставщик системы часто не имеет информации о соединительных проводах и подводящих кабелях.
Примечание - Большое внимание следует уделять подбору измерительных приборов. Они должны измерять реальные действующие значения с достаточным частотным спектром, включающим гармоники до 40-го порядка, и иметь достаточную точность, позволяющую определять потери с точностью не менее 7% общего допуска (см. 6.1.4) и соответственно 10% для каждого основного элемента системы.
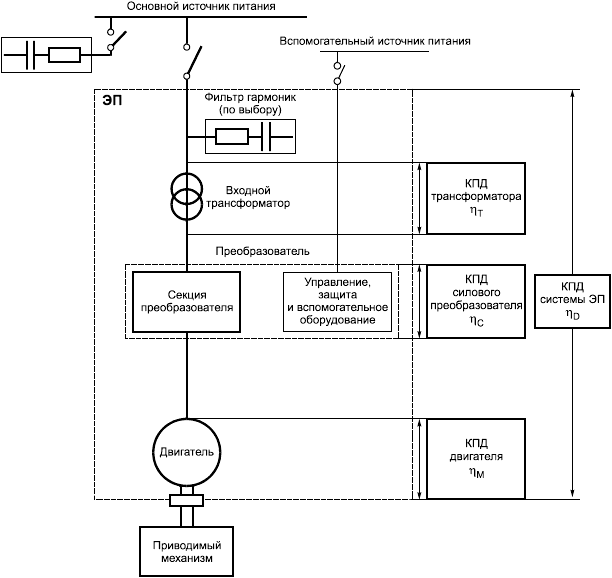
Рисунок 25 - Элементы системы силового ЭП и их КПД
КПД каждого элемента системы силового ЭП определяется следующим образом:
- КПД трансформатора: от точки присоединения к источнику до входных зажимов преобразователя (см. 11.2.2);
- КПД силового преобразователя: см. 3.1.6;
- КПД двигателя: от его электрических входных зажимов до выхода механической мощности (см. 11.2.4);
- КПД системы силового ЭП: см. 3.1.5.
11.2 Метод раздельных потерь
11.2.1 Общие положения
Используются соответствующие стандарты МЭК для отдельных компонентов системы привода, трансформаторов, реакторов, двигателей и преобразователей. Кроме этого изготовитель должен рассчитать добавочные потери от несинусоидальных форм кривых напряжений и/или токов. Эти методы следует подтверждать измерениями на отдельных элементах с подобной конструкцией и номиналами.
В тех случаях, когда расчетных методов подтверждения нет из-за особенностей конструкции, недостатка времени или по иным причинам, ниже представлены эмпирические формулы для добавочных потерь от гармоник. Тогда добавочные потери, вызванные гармониками токов и напряжений, задаются фиксированными коэффициентами относительно потерь от основной гармоники. Эти коэффициенты используются, только если в распоряжении нет более надежных данных.
Примечание - Потери, определенные этим способом, следует использовать только для расчетов КПД и не следует - для определения температур нагрева.
11.2.2 Потери в трансформаторе
Специальные требования к трансформаторам для преобразователей представлены в МЭК 60146-1-3 и МЭК 61378-1. Эти стандарты относятся к МЭК 60076 и МЭК 60726 для трансформаторов общего назначения с жидкостным и непосредственным воздушным охлаждением соответственно. Основные магнитные и электрические потери, так же как соответствующие дополнительные и добавочные потери, следует определять по этим стандартам.
Пока нет иных соглашений, определение потерь от высших гармоник должно базироваться на ниже изложенных допущениях относительно входных трансформаторов, которые питают диодные или тиристорные мосты. Искажение напряжения трансформатора невелико по сравнению с искажением тока, поэтому добавочные потери возникают главным образом в обмотках и сильно зависят от их конструкции. Добавочные потери от высших гармоник рассчитывают так:
![]() ,
,
где 0,3, если в кривой тока обмотки шесть или меньше пульсаций, или
0,2, если результирующий полный ток обмотки имеет 12 пульсаций или более;
- электрические потери в обмотке трансформатора от основной гармоники тока.
Этот коэффициент также учитывает дополнительные потери от потоков рассеивания. Его величины могут быть существенно ниже у оптимизированной конструкции трансформатора. Суммарные потери в трансформаторе
![]() ,
,
где - основные потери по МЭК 60146-1-3;
- дополнительные потери, если они существуют.
11.2.3 Силовой преобразователь
11.2.3.1 Общие положения
Обычно преобразователь состоит из входного 6- или 12-пульсного выпрямителя с естественной коммутацией, промежуточного фильтра с реакторами и/или конденсаторами и выходного инвертора. Инвертор представляет собой либо источник тока с непосредственной связью, либо источник напряжения с широтно-импульсной модуляцией (далее - ШИМ).
Потери в преобразователе обычно включают:
- потери в полупроводниковых приборах в приводящем режиме (см. приложение С);
- потери в полупроводниковых приборах при переключениях (см. приложение С);
- потери в устройствах защиты и управления - в снабберах (см. приложение С);
- потери в фильтрах преобразователя;
- добавочные потери;
- мощность, передаваемую для управления и защиты и т.п.;
- энергию на вентиляторы и насосы для охлаждающей среды.
Составляющие потерь и их определения описаны в МЭК 60146-1-1 и МЭК 60146-1-2. Кроме того, расчет потерь в снабберах и удельная мощность полупроводников представлены в приложении С.
Оборудование, создающее добавочные потери, может быть общим для выпрямительной и инверторной частей привода.
11.2.3.2 Выпрямитель
Потери должны определяться при номинальной (базовой) нагрузке и номинальном (базовом) угле зажигания, а также при максимальной нагрузке и соответствующем ей угле зажигания, если они различны.
11.2.3.3 Инвертор
Если инвертор коммутируется нагрузкой, то потери в основном те же, что и у выпрямителя, в соответствии с МЭК 60146-1-1 и МЭК 60146-1-2. Потери следует определять при номинальной (базовой) нагрузке и номинальном (базовом) угле зажигания и при максимальной нагрузке и соответствующем ей угле зажигания, если они различны.
Инверторы с естественной коммутацией рассмотрены в МЭК 60146-2.
Потери следует определять при номинальной (базовой) нагрузке и максимальной нагрузке, если они различны, так же как и в соответствующем ШИМ-образце.
11.2.3.4 Реактор в звене постоянного тока
Спецификации этих реакторов представлены в МЭК 60146-1-3.
Потери, в том числе и от гармонических составляющих, следует рассчитывать проверенными методами. Если таких методов нет, можно воспользоваться коэффициентами, представленными ниже.
Используя номинальное значение постоянного тока в звене постоянного тока, добавочные потери от пульсаций тока можно рассчитать следующим образом:
![]()
при 0,1 - для сердечников без стали;
0,15 - для стальных сердечников;
- сопротивление, соответствующее электрическим потерям при постоянном токе.
Эта формула применима для реакторов в инверторах напряжения.
11.2.3.5 Конденсатор в звене постоянного тока
Потерями в конденсаторах обычно пренебрегают.
11.2.3.6 Другие потери
В расчетах отдельно учитывают другие виды потерь, такие как во вспомогательных цепях, устройствах защиты, охлаждения и т.п.
11.2.4 Потери в двигателе
11.2.4.1 Общие положения
Согласно МЭК 60034-2 существуют два различных метода испытаний:
- вращать испытуемый двигатель другим калиброванным двигателем;
- питать его от регулируемого источника синусоидального напряжения.
Первый способ обычно наиболее подходит для синхронных двигателей, второй - для асинхронных. Однако, если регулируется только напряжение, а не частота, КПД можно определить только при одном значении частоты питания.
Оба способа позволяют определять раздельно следующие составляющие потерь:
- потери на трение и вентиляцию;
- потери в стали;
- электрические потери в обмотке статора;
- потери в роторе.
Потери на возбуждение и добавочные, такие как в смазывающем насосе и в автономном вентиляторе (если они есть), тоже учитывают в процессе измерений.
11.2.4.2 Однофазные двигатели
Способы определения КПД двигателей, работающих при чисто синусоидальных напряжениях и токах, представлены в МЭК 60034-2. Дополнительно предварительные способы учета потерь от высших гармоник представлены в МЭК 60034-2 (приложение А).
11.2.4.3 Двухобмоточные двигатели
Если между 3-фазными обмотками нет пространственного сдвига, их можно соединить параллельно, и оба метода испытаний приемлемы.
Если трехфазные обмотки сдвинуты относительно друг друга и если оба конца каждой из них не выведены, то есть их нельзя соединить последовательно, единственным методом испытания является приведение его во вращение калибровочным двигателем, так как вряд ли найдется регулируемый источник питания со смещенными по фазе напряжениями.
В опытах короткого замыкания две 3-фазные обмотки следует замыкать независимо друг от друга.
11.2.4.4 Потери от высших гармоник
Если нет другой договоренности, потери от высших гармоник следует определять при приведенных ниже допущениях.
Так же как и в трансформаторах, добавочные потери от высших гармоник возникают главным образом в обмотках (статора и ротора двигателя).
Если кривая тока имеет форму, близкую к прямоугольной, добавочные потери от высших гармоник можно оценить по формуле
![]() ,
,
где - число фаз;
0,15 - для 3-фазной обмотки;
0,1 - для 6-фазной обмотки.
В случае асинхронных двигателей, питаемых от преобразователя - источника напряжения, ситуация значительно усложняется и зависит от способа модуляции, формы импульса и конструкции двигателя, особенно беличьей клетки ротора. Можно использовать следующие коэффициенты:
0,1 для синусоидальной ШИМ в диапазоне до 80% номинальной скорости вращения или для трехуровневых ШИМ-преобразователей;
0,2 для ШИМ при скорости вращения выше 80% номинальной, имеющей хотя бы шесть импульсов на периоде основной гармоники;
0,3 при высокой скорости без ШИМ, то есть при шестиступенчатой работе.
Формула для справедлива только при номинальном токе
, потому что у преобразователей - источников напряжения состав высших гармоник тока мало зависит от нагрузки.
В приведенной выше формуле является результирующим активным сопротивлением одной фазы статора
и ротора
, причем последнее приведено к статору при частоте основной гармоники
![]() .
.
Коэффициент учитывает добавочные потери от высших гармоник при нагрузке.
Активное сопротивление фазы обмотки ротора, приведенное к обмотке, следует определять посредством измерения потерь короткого замыкания при номинальном токе и заторможенном роторе.
Для -фазного асинхронного двигателя через потери в статорной обмотке можно найти
 ,
,
где - номинальный ток в обмотке статора.
11.3 Испытание системы при полной нагрузке
11.3.1 Общие положения
Принципиально это - единственный путь получить действительные величины потерь в системе, то есть и ее КПД. Это также единственный путь для измерения действительных превышений температур отдельных устройств до реализации.
Для этого испытания требуется нагрузочная машина, имеющая по крайней мере ту же мощность, что и двигатель испытуемого привода. Мощность на валу может быть измерена через скорость и момент на валу или с помощью калиброванной нагрузочной машины. Если в наличии есть два идентичных электропривода, следует использовать установку взаимной нагрузки.
Измерительная схема, обозначения и индексы показаны на рисунке 23. Потери в основной силовой цепи конкретного устройства принципиально можно определить как разность входной и выходной мощностей:
![]() .
.
Вследствие высокой эффективности результирующие потери получаются как относительно небольшая разность двух относительно больших цифр. Поэтому вторая часть вышеприведенной формулы, которая содержит результаты измерений каждой составляющей, дает высокую точность. Точность измерительных приборов также должна быть очень высокой, обычно 0,02% или выше, с частотным диапазоном вплоть до 40-й гармоники. Дополнительная информация об этом указана в МЭК 60034-2 (раздел 2).
11.3.2 Потери в трансформаторе
Кроме полученных непосредственным измерением потери трансформатора содержат дополнительные, такие как в вентиляторах или насосах для форсированного охлаждения, если оно имеется. Другие добавочные потери, например в элементах конструкции и баке, уже включены в .
КПД трансформатора
![]() .
.
Потери в фильтре (если он имеется) должны измеряться отдельно, они не являются частью потерь трансформатора.
11.3.3 Потери в преобразователе
Дополнительными потерями, которые не включают в результаты прямых измерений, могут быть:
- потери в вентиляторах и насосах систем охлаждения (если они есть);
- потери во внешних источниках питания.
Результирующий КПД преобразователя
![]() .
.
11.3.4 Потери в двигателе
Для двигателя дополнительными потерями, не вошедшими в результаты прямых измерений, будут:
- потери во внешних вентиляторах с независимым питанием;
- потери в насосах для перекачки охлаждающей среды, имеющих независимое питание;
- мощность, потребляемая системой возбуждения;
- потери в насосах для перекачки смазки подшипников.
Примечание - Учитывать следует только потери в насосе, в двигателе насоса и проводящих проводах. Остальная часть энергии, потребляемой насосом, включается в подшипниковые потери главного двигателя электропривода.
При использовании метода взаимной нагрузки мощность на валу нельзя получить непосредственным измерением. Две одинаковые машины, одна работающая двигателем, а другая - генератором, как можно точнее настраиваются на одинаковые, обычно номинальные значения напряжения, тока и коэффициента мощности. Средние для двух машин величины считаются измеренными показателями. Половина потерь, получаемая как разность потребляемой мощности двигателя
и выходной мощностью генератора
, рассматривается в качестве основных потерь двигателя в электроприводе:
![]() .
.
КПД двигателя
![]() .
.
11.3.5 Фильтр гармоник
Если фильтр гармоник является составной частью привода, присоединенной к вторичной обмотке трансформатора или к отдельной обмотке, потери в фильтре измеряются в составе потерь трансформатора. Разделить их можно индивидуальными измерениями.
Если фильтр помещен где-то в цепи первичной обмотки трансформатора, для определения его потерь требуется индивидуальное измерение.
11.3.6 Результирующий коэффициент полезного действия системы электропривода
Результирующий КПД системы привода
![]() .
.
Примечание 1 - Метод непосредственного испытания при полной нагрузке основан только на электрических измерениях. Если некоторые из них заменить на калориметрические измерения, придется учитывать незначительные передачи тепла с корпуса машины в окружающую среду и т.п.
Примечание 2 - При планировании и подготовке протоколов вышеописанных измерений следите за тем, чтобы все добавочные потери были учтены, но только один раз.
Приложение А
(справочное)
Наиболее часто используемые топологии систем электропривода
А.1 Предмет
В данном приложении представлены упрощенные блок-схемы топологии наиболее часто используемых систем привода. Общая информация представлена в разделе 4. По выбору можно добавить различные фильтры, трансформаторы, элементы обратной связи и др.
В упрощенных блок-схемах символ ключа используется для полупроводниковых ключевых элементов, которые выключаются сигналами управления. Обратите внимание, что если параллельно с ключевым элементом не изображен диод, то полупроводниковый ключ с обратной блокирующей способностью.
А.2 Топологии систем привода со звеном постоянного тока
А.2.1 Системы электропривода с синхронным двигателем и инвертором с естественной коммутацией
Общая структура привода показана на рисунке А.1.
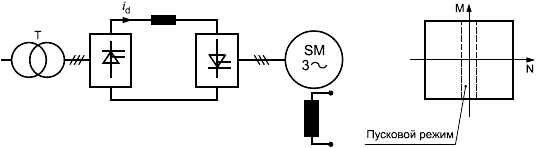
Рисунок А.1 - Принципиальная схема привода с синхронным двигателем и инвертором с естественной коммутацией
Привод состоит из:
- коммутируемого сетью преобразователя;
- коммутируемого нагрузкой преобразователя на стороне двигателя;
- реактора постоянного тока в звене постоянного тока;
- синхронного двигателя;
- системы возбуждения синхронного двигателя.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- пульсации момента при скоростях вращения ниже минимальной (в режиме пуска);
- низкий коэффициент мощности со стороны питающей сети, зависящий от потребляемой мощности.
А.2.2 Система электропривода с асинхронным двигателем и инвертором с естественной коммутацией
Общая структура привода показана на рисунке А.2.
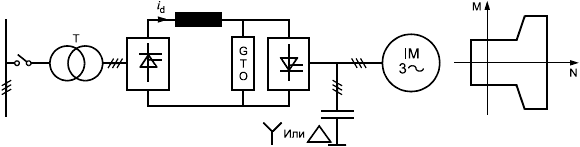
Рисунок А.2 - Принципиальная схема привода с асинхронным двигателем и инвертором с естественной коммутацией
Привод состоит из:
- коммутируемого сетью преобразователя;
- преобразователя с принудительной коммутацией на стороне двигателя;
- реактора постоянного тока;
- запираемого тиристора (GTO);
- батареи конденсаторов на выходе;
- асинхронного двигателя.
Общими характеристиками привода являются:
- работа в двух квадрантах;
- пониженные пульсации момента двигателя при наличии соответствующего выходного фильтра;
- низкий коэффициент мощности со стороны питающей сети, зависящий от потребляемой мощности.
А.2.3 Системы электропривода с асинхронным двигателем и инвертором - источником тока
Общая структура привода показана на рисунке А.3.
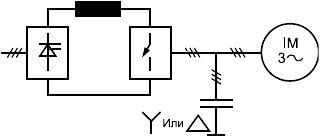
Рисунок А.3 - Принципиальная схема привода с асинхронным двигателем и ШИМ-инвертором с естественной коммутацией - источником тока
Привод состоит из:
- коммутируемого сетью преобразователя;
- преобразователя с естественной коммутацией на стороне двигателя;
- реактора постоянного тока;
- батареи конденсаторов на выходе;
- асинхронного двигателя.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- незначительные пульсации момента (пренебрежимо малые, если используется ШИМ);
- низкий коэффициент мощности со стороны питающей сети, зависящий от потребляемой мощности.
А.2.4 Система электропривода с асинхронным двигателем и двойным инвертором - источником тока
Общая структура привода показана на рисунке А.4.
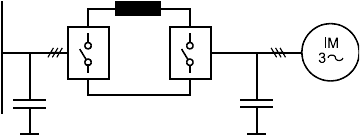
Рисунок А.4 - Принципиальная схема привода с асинхронным двигателем и двойным ШИМ-инвертором с естественной коммутацией - источником тока
Привод состоит из:
- батареи конденсаторов на входе;
- преобразователя с естественной коммутацией со стороны питающей сети;
- преобразователя с естественной коммутацией на стороне двигателя;
- реактора в звене постоянного тока;
- батареи конденсаторов на выходе;
- асинхронного двигателя.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- незначительные пульсации момента (пренебрежимо малые, если используется ШИМ);
- равный почти единице коэффициент мощности со стороны сети;
- пониженное содержание высших гармоник в потребляемом токе.
А.2.5 Системы электропривода с синхронным или асинхронным двигателем и инвертором - источником напряжения
Общая структура привода показана на рисунке А.5.
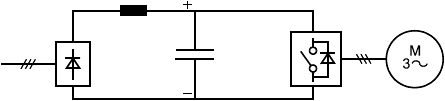
Рисунок А.5 - Трехфазная система привода с инвертором - источником напряжения
Привод состоит из:
- диодного выпрямителя со стороны питающей сети;
- преобразователя с естественной коммутацией на стороне двигателя;
- реактора постоянного тока (если требуется);
- батареи конденсаторов в звене постоянного тока;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в двух квадрантах;
- незначительные пульсации момента (пренебрежимо малые, если используется ШИМ);
- высокий коэффициент мощности со стороны питающей сети.
А.2.6 Система электропривода с синхронным или асинхронным двигателем и трехуровневым инвертором - источником напряжения, имеющим вывод от точки нейтрали
Общая структура привода показана на рисунке А.6, а детальная схема инвертора с выведенной нейтралью дана на рисунке А.7.
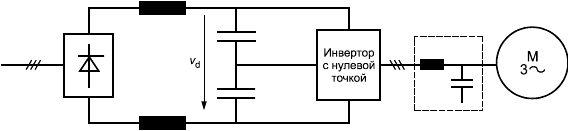
Рисунок А.6 - Система привода с инвертором - источником напряжения, имеющим вывод нейтрали
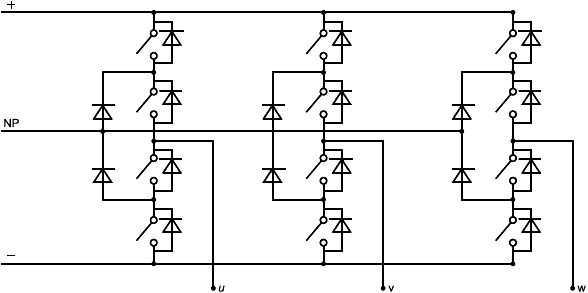
Рисунок А.7 - Схема инвертора с выведенной нейтралью
Привод включает в себя:
- диодный выпрямитель на входе (6-пульсный, 12-пульсный или с большим числом пульсов);
- инвертор с естественной коммутацией и выведенной нейтралью на стороне двигателя;
- реактор постоянного тока (если требуется);
- батарею конденсаторов в звене постоянного тока;
- синхронный или асинхронный двигатель;
- систему возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в двух квадрантах;
- работа в четырех квадрантах при использовании преобразователя с выведенной нулевой точкой в звене постоянного тока;
- низкие пульсации момента двигателя благодаря использованию ШИМ;
- трехуровневая ШИМ;
- высокий коэффициент мощности со стороны питающей сети;
- небольшие гармонические искажения на стороне питающей сети при применении многопульсного диодного выпрямителя.
А.2.7 Система электропривода с синхронным или асинхронным двигателем и многоуровневым инвертором в режиме источника напряжения, имеющим симметрично включенные буферные конденсаторы
Общая структура показана на рисунке А.8, а детальная схема многоуровневого инвертора представлена на рисунке А.9.
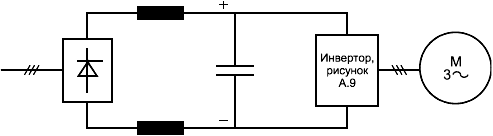
Рисунок А.8 - Система электропривода с многоуровневым инвертором в режиме источника напряжения
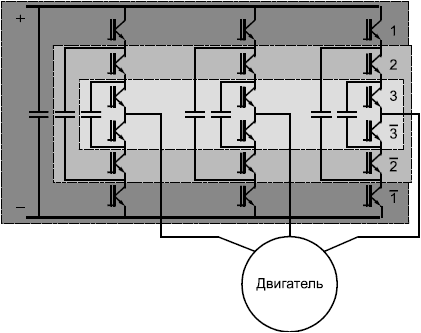
Рисунок А.9 - Схема многоуровневого инвертора
Эта система привода содержит:
- диодный выпрямитель на входе, обычно 12-пульсный;
- реактор в цепи выпрямленного постоянного тока (если требуется);
- батарею конденсаторов в цепи постоянного тока;
- многоуровневый преобразователь с естественной коммутацией на стороне двигателя, включающий симметричные буферные конденсаторы;
- синхронный или асинхронный двигатель;
- систему возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в двух квадрантах;
- работа в четырех квадрантах при использовании структуры многоуровневого инвертора с нулевой точкой в звене постоянного тока преобразователя;
- низкие пульсации момента двигателя из-за использования ШИМ и многоуровневой структуры;
- высокий коэффициент мощности на стороне питающей сети;
- небольшие гармонические искажения на стороне питающей сети при применении многопульсного диодного выпрямителя.
А.2.8 Инвертор - источник напряжения в реверсивном преобразователе на стороне питающей сети в электроприводе с синхронным или асинхронным двигателем
Принципиальная схема привода показана на рисунке А.10; она получается из схемы на рисунке А.5 при добавлении рекуперирующей секции преобразователя. Такую же модификацию можно применить к инвертору с выведенной нейтралью (рисунок А.6) или к многоуровневому инвертору (рисунок А.8).
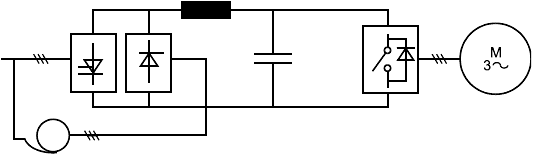
Рисунок А.10 - Трехфазный инвертор в режиме источника напряжения с реверсивным преобразователем на стороне питающей сети
Эта система привода состоит из:
- диодного выпрямителя на входе;
- ведомого сетью преобразователя;
- преобразователя с естественной коммутацией на стороне двигателя;
- автотрансформатора (по выбору);
- реактора в цепи постоянного тока (если требуется);
- конденсаторной батареи в цепи постоянного тока;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- низкие пульсации момента двигателя (пренебрежимо малые, если используется ШИМ);
- высокий коэффициент мощности на стороне сети в двигательном режиме;
- низкий коэффициент мощности на стороне сети в режиме рекуперации, зависящий от отдаваемой мощности.
А.2.9 Системы электропривода с синхронным или асинхронным двигателем и инвертором - двойным источником напряжения
Принципиальная схема привода показана на рисунке А.11; она получается из схемы на рисунке А.5 заменой диодного выпрямителя со стороны питающей сети на инвертор с естественной коммутацией. Такую же модификацию можно применить к инвертору с выведенной нейтралью (рисунок А.6) или к многоуровневому инвертору (рисунок А.8).
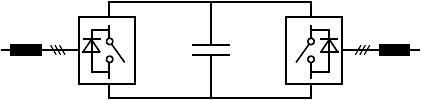
Рисунок А.11 - Система привода с инвертором - двойным источником напряжения
Этот привод состоит из:
- реактора со стороны питающей сети;
- преобразователя с естественной коммутацией со стороны питающей сети;
- преобразователя с естественной коммутацией на стороне двигателя;
- батареи конденсаторов в звене постоянного тока;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- малые пульсации момента (ими можно пренебречь, если используется ШИМ);
- коэффициент мощности со стороны питания близок к единице;
- пониженный состав гармоник тока на входе.
А.2.10 Многоуровневый инвертор - источник напряжения, трансформатор с несколькими вторичными обмотками
Основная структурная схема привода показана на рисунке А.12. Схема каждого их силовых модулей (РМ) дана на рисунке А.13.
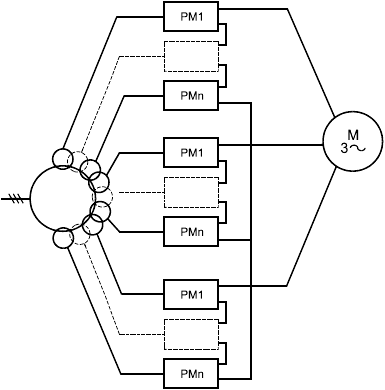
Рисунок А.12 - Система привода с многоуровневым инвертором - источником напряжения
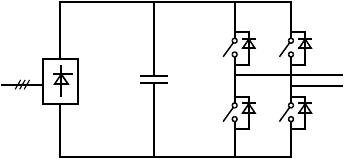
Рисунок А.13 - Силовой модуль (РМ) в каждом уровне
Система привода состоит из:
- последовательно соединенных силовых модулей в каждой фазе двигателя (каждый силовой модуль построен на базе однофазного инвертора с индивидуальным звеном постоянного тока);
- трансформатора с отдельными изолированными вторичными обмотками для питания всех силовых модулей;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общие характеристики системы привода:
- работа в двух квадрантах;
- малые пульсации момента двигателя (ими можно пренебречь, если используется ШИМ);
- коэффициент мощности со стороны сети почти равен единице;
- пониженный состав гармоник тока на входе.
А.3 Топологии систем электропривода с непосредственными преобразователями
А.3.1 Непосредственные преобразователи и циклоконвертеры
В непосредственных преобразователях преобразование напряжения переменного тока фиксированной амплитуды и частоты в другое напряжение переменного тока с изменяемой амплитудой и частотой осуществляется без промежуточной ступени постоянного тока.
Циклоконвертер представляет собой основной пример выполнения непосредственного преобразователя. Его базовым элементом является однофазная схема из двух встречно-параллельных трехфазных тиристорных мостов, способная работать в четырех квадрантах. Угол зажигания каждого моста модулируется так, чтобы получить выходное напряжение переменного тока. Трехфазный циклоконвертер укомплектован тремя однофазными элементами, управляемыми так, чтобы создавать на выходе переменные напряжения с одинаковыми амплитудой и частотой, смещенные по фазе на 120°.
Циклоконвертер может работать в режимах как с контурными токами, так и без них.
А.3.2 Циклоконвертер без контурных токов с синхронным или асинхронным двигателем
Принципиальная схема привода показана на рисунке А.14.
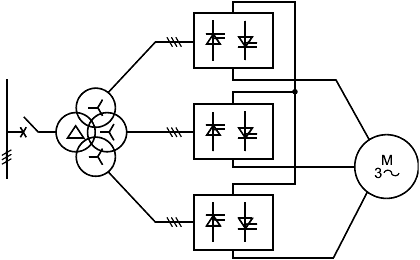
Рисунок А.14 - Трехфазный шестипульсный циклоконвертер с четырехобмоточным трансформатором
Этот привод состоит из:
- трех реверсивных преобразователей с принудительной коммутацией;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- работа при низких скоростях вращения (максимальная частота на выходе преобразователя равна примерно от одной трети до половины частоты питающей сети);
- ничтожные пульсации момента;
- низкий коэффициент мощности со стороны сети.
А.3.3 Циклоконвертер с контурными токами с синхронным или асинхронным двигателем
Принципиальная схема привода показана на рисунке А.15.
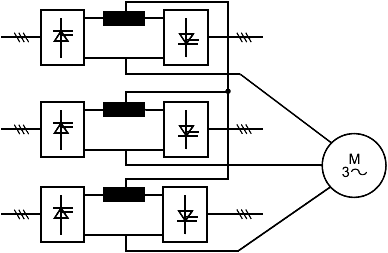
Рисунок А.15 - Циклоконвертер с контурными токами
Эта система привода состоит из:
- трех реверсивных преобразователей с внешней принудительной коммутацией;
- синхронного или асинхронного двигателя;
- системы возбуждения, если используется синхронный двигатель.
Общими характеристиками привода являются:
- работа в четырех квадрантах;
- работа при низких скоростях вращения (максимальная частота на выходе преобразователя равна примерно 4/5 частоты питающей сети);
- незначительные пульсации момента;
- низкий коэффициент мощности со стороны сети.
А.3.4 Другие конфигурации электроприводов
Используются и некоторые другие конфигурации систем электроприводов, например:
- с асинхронным двигателем двойного питания, у которого ограничен диапазон скоростей вращения;
- каскад Шербиуса с рекуперацией в сеть мощности скольжения ротора.
Примечание - Каскадный привод Крамера, в котором энергия скольжения ротора через выпрямитель питает двигатель постоянного тока с независимым возбуждением, соединенный общим валом с основным, очень редко используется;
- четырехквадрантная система с питанием со стороны ротора, позволяющая управлять опережающим или отстающим током статора.
Эти конфигурации допускают применение преобразователя меньшей номинальной мощности, чем номинальная мощность двигателя, в соответствии с требуемым диапазоном регулирования скорости ниже или выше синхронной скорости вращения.
Приложение В
(справочное)
Способы регулирования скорости и механическая часть электропривода
В.1 Общие положения
Существует много способов регулирования скорости вращения, которые используются для наилучшего удовлетворения таких требований, как высокая точность, быстродействие, малые пульсации момента, стойкость к механическим воздействиям, работа без датчиков и т.д. Выбор способа регулирования зависит от требуемых характеристик системы электропривода и условий эксплуатации приводимого им в движение оборудования.
Однако качество управления скоростью сильно зависит от механической системы, соединенной с валом двигателя. Существенно отметить, что поставщик оборудования, приводимого в движение электроприводом, во многих случаях ответствен за качество регулирования скорости вращения. Задачами данного приложения являются, во-первых, дать информацию о связи между способом регулирования скорости и механическими параметрами системы, и, во-вторых, представить путеводитель по спецификациям систем автоматического регулирования скорости вращения.
В.2 Основные типы систем регулирования скорости вращения
В основном существуют три типа систем регулирования скорости (см. рисунок В.1):
a) разомкнутая, без обратных связей;
b) замкнутая, с непрямыми (расчетными) обратными связями. Этот расчет выполняется через электромагнитные переменные, такие как напряжение, поток, ток, пульсации переменных преобразователя и т.п.;
c) замкнутая, с прямыми обратными связями в виде сигналов от датчиков.
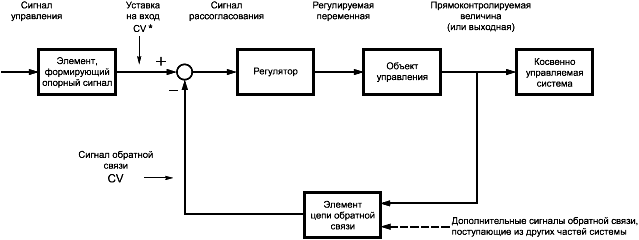
Рисунок В.1 - Блок-схема следящей системы со всеми основными элементами
Примечание - CV - регулируемая переменная величина, на блок-схеме она присутствует в виде:
- уставки на входе CV*;
- действительного измеренного значения CV.
В.3 Влияние упругости на регулирование скорости вращения
В.3.1. Демпфирование пульсаций момента
Важно различать моменты:
- электромагнитный, создаваемый электрической машиной;
- механический, создаваемый нагрузкой на валу.
Последний включает в себя реакцию всех элементов механической части системы. Так что если другое специально не оговаривается, то под словом "момент" обычно понимается электромагнитный момент без учета реакции нагрузки и механических потерь.
Для соединения двигателя с приводимым в движение оборудованием напрямую валами или через зубчатую передачу существует собственная частота крутильных колебаний (), зависящая от моментов инерции и упругости трансмиссии, определяемая формулой:
 ,
,
где - момент инерции ротора двигателя, кгм
;
- момент инерции приводимого оборудования, кгм
;
- жесткость на кручения, Н·м/радиан (
![]() упругость);
упругость);
- собственная частота крутильных колебаний, Гц.
Эта формула относится к двухмассовой системе с двумя моментами инерции (см. рисунок В.2). (В случае систем с тремя или более моментами инерции появятся две или более . Однако на практике учитываются одна или две наименьших
как имеющие значение.)

Рисунок В.2 - Механическая схема с двумя моментами инерции
Пульсации электромагнитного момента двигателя или момента приводимого оборудования могут вызвать большие напряжения вала, если частота пульсаций близка или равна хотя бы одной . Это в особенности относится к разомкнутым системам регулирования скорости вращения.
Замкнутая система регулирования скорости может сама демпфировать крутильные колебания. Условиями успешного демпфирования являются:
- наиболее значительные надежны внутри ширины полосы пропускания регулятора момента (см. 7.2.3.1). Обычно
должна быть меньше половины ширины полосы пропускания регулятора момента при 3 дБ (примерную оценку этой ширины полосы пропускания дает
![]() , где
, где - время переходного процесса при регулировании момента или тока;
- задержки в системе измерения скорости малы, обычно меньше, чем время переходного процесса регулирования момента;
- высокая точность системы измерения скорости вращения;
- регулятор скорости вращения правильно настроен.
Способность замкнутой системы регулирования скорости вращения демпфировать крутильные колебания объясняется компенсацией пульсаций моментов двигателя и нагрузки. Эти пульсации компенсируются противодействующими изменениями сигнала управления моментом. Высокая точность и хорошая динамика системы измерения скорости вращения требуются для надежного демпфирования потому, что в основе компенсации лежит быстро изменяющиеся разности между уставкой по скорости и измеренной скоростью. Эти разности обычно невелики и естественно уменьшаются при снижении уровня колебаний.
Пульсации момента нагрузки демпфировать гораздо труднее, чем пульсации момента двигателя. Причинами являются частично сложность и частично высокое затухание механической системы. Первое обстоятельство затрудняет компенсацию, а второе усложняет распознание изменений скорости вращения, вызванных пульсациями нагрузочного момента.
В.3.2 Динамические характеристики при регулировании скорости вращения
В дополнение к динамические характеристики при регулировании скорости вращения зависят от антирезонансной частоты (
) крутильных колебаний механической системы (см. рисунок В.2):
 ,
,
где - момент инерции приводимого в движение оборудования, кгм
;
- жесткость на кручения, Н·м/радиан (
![]() упругость);
упругость);
- антирезонансная частота, Гц.
Эта формула относится к двухмассовой системе с двумя моментами инерции. В случае систем с тремя или более моментами инерции появятся две или более . Однако на практике только наименьшая
имеет значение.
Сравнивая формулы для и
, можно видеть, что всегда
![]() . Чем больше отношение момента инерции нагрузочного механизма к моменту инерции двигателя
. Чем больше отношение момента инерции нагрузочного механизма к моменту инерции двигателя ![]() , тем больше разница между этими частотами. Обратите внимание, что
, тем больше разница между этими частотами. Обратите внимание, что определяется исключительно свойствами оборудования, приводимого в движение электроприводом.
Возможны три основных случая:
а) все и
по крайней мере на порядок выше, чтобы быть демпфированными регулированием скорости вращения (см. список в В.3.1).
В этом случае динамические свойства канала регулирования скорости определяются исключительно динамикой регулятора момента или системы измерения скорости вращения. Заметьте, что в мощных ЭП эта ситуация встречается редко, потому что значительные и
оборудования большой мощности обычно весьма невелики, ниже 20 и 30 Гц. Единственное исключение, где этот случай может иметь место, представляют системы регулирования скорости вращения, использующие непрямую обратную связь по скорости, из-за длительной задержки, связанной с определением скорости вращения;
b) значительные и
невелики, чтобы быть демпфированными регулированием скорости вращения.
Этот случай наиболее часто встречается в силовых ЭП с обратной связью от датчиков прямого измерения скорости вращения. Регулятор скорости должен быть настроен так, чтобы демпфировать резонансы, гарантируя устойчивое регулирование скорости вращения. Тогда наилучшее регулирование скорости ограничивается свойствами механической системы. Наиболее критична минимальная . Достижимое время переходного процесса регулятора скорости приблизительно равно
![]() . Например, если
. Например, если ![]() 10 Гц, оно будет около 1/10 Гц=100 мс;
10 Гц, оно будет около 1/10 Гц=100 мс;
c) по крайней мере одна из резонансных частот очень велика, чтобы быть демпфированной, но не настолько, чтобы ею можно было пренебречь.
Чтобы регулятор скорости не усиливал резонансные колебания, он должен быть снабжен фильтром, который ослабляет сигналы резонансных частот. Однако негативным эффектом такого фильтра является то, что он нередко серьезно ухудшает динамику регулирования скорости.
В заключение, наиболее часто экономически и технически нецелесообразно создавать силовые ЭП с прямой обратной связью от датчика скорости таким образом, чтобы резонансные частоты были достаточно высокими для случая а). Динамические свойства случая с) часто хуже, чем случая b), так что случай b) является правильным выбором. Таким образом, чтобы получить требуемые качества регулирования скорости вращения, минимальная приводимого в движение оборудования должна быть достаточно высокой, а характеристики системы регулирования - способными демпфировать резонансные частоты.
Пример - Выбрано время переходного процесса регулирования скорости вращения 80 мс. Таким образом, требуемая должна быть равна по крайней мере 1/80 мс = 12,5 Гц. Если приводимое в движение оборудование имеет момент инерции
3000 кгм
, требуемая крутильная жесткость вала будет
![]() МНм/радиан
МНм/радиан
для системы с двумя моментами инерции. Если момент инерции двигателя равен 7000 кгм,
будет
 Гц.
Гц.
Чтобы быть способной демпфировать эту, канал управления моментом
должен иметь полосу пропускания по крайней мере в два раза больше
, то есть 2·14,9 Гц
30 Гц. Результирующее максимальное время переходного процесса при регулировании момента будет
![]() мс.
мс.
Примечание - Пример относится только к двухмассовой системе ЭП. На практике механическая система сложнее, она включает инерционные массы муфт и редукторов. Более того, иногда требуется учесть структуру фундаментов под двигателем и приводимым оборудованием. Поэтому проектирование механической части системы лучше оставить специалистам.
В.4 Влияние люфтов
Люфт зубчатой передачи вносит нелинейность в систему электропривода, когда есть возможность изменения знака момента (например, при подаче скачкообразной команды на реверсирование, требующей торможения привода, питаемого от четырехквадрантного преобразователя).
При изменении знака момента появляется люфт, на очень короткое время отсоединяющий двигатель от приводимого в движение оборудования и уменьшающий инерцию системы, связанной с валом двигателя. Регулятор скорости вращения очень быстро чувствует эти изменения. В этой точке в системе могут возникнуть крутильные вибрации, которые демпфируются через несколько периодов (в зависимости от коэффициента демпфирования системы).
Эти временные вибрации можно уменьшить, но не всегда уничтожить, заложив специальную функцию компенсации люфта. Если требуются хорошие динамические характеристики привода, необходимо минимизировать люфты.
В.5 Критерии выбора способа регулирования скорости вращения
В.5.1 Разомкнутая система регулирования скорости
Есть два главных преимущества у разомкнутой системы регулирования скорости. Первое - она не требует датчика скорости и второе - ей не требуется точная информация о значениях параметров двигателя. Поэтому этот способ регулирования особенно предпочтителен для двигателей, работающих параллельно, и для двигателей, находящихся далеко от ВДМ/СДМ - шинопроводов и кабельных каналов питания.
Естественные и обычные колебания скорости в установившихся режимах лежат в пределах от ±1 до ±2% (типичное значение) у систем регулирования скорости с асинхронными двигателями (не принято использовать синхронные двигатели в разомкнутых системах регулирования скорости силовых ЭП). Однако, если силовой ЭП является частью замкнутой системы регулирования (скажем, давления, уровня воды и т.п.), девиации скорости вращения корректируются внешней обратной связью, и это не является проблемой.
Динамическая устойчивость и динамические характеристики разомкнутой системы регулирования скорости плохие, что исключает ее применение, когда требуется высокое быстродействие. Бывают моменты, когда ограниченные динамические свойства могут создать проблемы, потому что нельзя демпфировать крутильные колебания. Это в особенности важно, когда требуется продолжительная работа при низкой скорости вращения, так как шестая гармоника момента обычно совпадает с низшей резонансной частотой крутильных колебаний в диапазоне выходных частот инвертора от 5/6 до 50/6 Гц, то есть примерно от 0,8 до 8 Гц.
В.5.2 Регулирование скорости вращения в системе с непрямыми обратными связями
Главными достоинствами регулирования скорости с непрямой обратной связью являются:
- не требуется датчик скорости;
- установившиеся девиации скорости меньше, чем при регулировании в разомкнутой системе.
Недостатком является то, что точность определения скорости вращения асинхронного двигателя зависит от точности параметров, используемых в модели двигателя. Поэтому ошибка в оценке параметров может зависеть, например, от температуры нагрева двигателя. Более того, при скоростях ниже 10% или 15% базовой скорости ошибка измерений напряжения двигателя начинает доминировать, увеличивая, таким образом, общую ошибку в оценке скорости.
У синхронных двигателей статические характеристики значительно лучше вследствие синхронных свойств двигателя. Однако у них тоже могут быть ограничения при работе на низких скоростях вращения силового ЭП из-за вышеупомянутых измерений напряжения.
Динамические характеристики сильно зависят от способа оценки. Как правило, динамика лучше при высоких скоростях двигателя. Однако демпфирование крутильного резонанса может оказаться невозможным, даже если двигатель вращается с базовой скоростью или выше.
Способ регулирования с непрямыми обратными связями подходит для применения там, где требуются хорошие характеристики в установившихся режимах при медленных изменениях момента нагрузки.
В.5.3 Замкнутая система регулирования скорости вращения
Замкнутая система регулирования скорости имеет наилучшие характеристики управления. Естественно, свойства датчика скорости и всей системы регулирования скорости важны, когда требуются малые диапазон колебаний и задержка в измерениях.
В замкнутой системе точная работа силового ЭП возможна вплоть до нулевой скорости вращения вне зависимости от момента нагрузки. Заметим, однако, что приводы, например, с инвертором, коммутируемы нагрузкой, все-таки имеют ограниченные возможности работать при низких скоростях с большим моментом нагрузки, что связано с их принципом действия.
Регулирование скорости вращения в замкнутой системе рекомендуется применять при повышенных требованиях к динамике, например, в приводах прокатных станов, а также там, где требуется продолжительная работа с малой скоростью и большим моментом. Более того, высококачественное регулирование в замкнутой системе может быть необходимым для некоторых применений для того, чтобы повысить демпфирование крутильных резонансов, если они возникают в механической системе.
В.6 Спецификация методов регулирования скорости вращения
Непросто сформулировать требования к качеству регулирования скорости, потому что часто трудно узнать, что действительно нужно приводимому оборудованию для удовлетворительной работы. Вследствие этого часто значения требуемых величин назначаются такими, чтобы создать уверенность надежной работы.
Однако такая перестраховка может привести к завышению стоимости оборудования, так как потребуется высококачественный датчик скорости, а в некоторых случаях более жесткий вал между двигателем и приводимым механизмом, чтобы получить более высокую .
Более того, если поставить требование повышенного быстродействия, это будет означать соответствующую настройку регулятора скорости. Пока она новая, система работает хорошо с такой настройкой. Со временем будут увеличиваться люфты из-за износа механических частей. Увеличенные люфты еще более уменьшают область стабильного регулирования скорости, следствием чего является рост крутильных колебаний и дальнейшего механического износа. Таким образом укорачивается ресурс механических частей - шпинделей, муфт, зубчатых передач и т.п.
Можно сделать вывод, что постановка самых высоких требований может оказаться не идеальной, надо внимательно определять оптимальные значения показателей для каждого привода.
Приложение С
(справочное)
Потери в силовых полупроводниковых приборах
С.1 Тиристор
С.1.1 Потери в открытом состоянии (потери, связанные с прямым падением напряжения)
В открытом состоянии тиристора прямой ток и прямое падение напряжения вызывают потери в открытом тиристоре в установившемся режиме.
Потери в открытом тиристоре можно выразить как
![]() ,
,
где - потери от прямого падения напряжения или потери открытого тиристора, Вт;
- напряжение на открытом тиристоре (прямое пороговое падение напряжения), В;
- сопротивление открытого тиристора, Ом;
- среднее значение анодного тока тиристора, А;
- действующее значение анодного тока тиристора, А.
С.1.2 Потери от прямого тока утечки
Когда к зажимам анода и катода тиристора приложено прямое напряжение и тиристор поддерживается в закрытом состоянии, ток утечки от анода к катоду вызывает потери от прямого тока утечки. Обычно потери от прямого тока утечки пренебрежимо малы, потому что прямой ток утечки у тиристора очень мал.
С.1.3 Потери от обратного тока утечки
В течение обратного периода, когда тиристор заперт, ток утечки от катода к аноду вызывает потери от обратного тока утечки. Обычно потери от обратного тока утечки пренебрежимо малы, потому что этот ток очень мал. Однако коммутационные потери возрастают у высоковольтных тиристоров или у работающих при высоких частотах.
С.1.4 Коммутационные потери (потери при включении и потери при выключении)
Коммутационные потери пренебрежимо малы; исключения составляют инверторы с высокой выходной частотой, инверторы с высокой частотой ШИМ (которые недавно стали применяться в устройствах с естественной коммутацией) и высоковольтные преобразователи.
С.1.5 Потери энергии в затворах
Потери в затворах тиристоров зависят от тока затвора и напряжения между затвором и катодом. В мощных полупроводниках эти потери обычно пренебрежимо малы.
С.2 GTO/GCT тиристоры (запираемые по затвору, коммутируемые по управляющему электроду)
С.2.1 Потери в открытом состоянии (потери, связанные с прямым падением напряжения)
Когда GTO открыт, прямой ток и прямое падение напряжения вызывают потери в установившемся режиме
![]() ,
,
где - потери от прямого падения напряжения или потери в открытом состоянии, Вт;
- напряжение на открытом тиристоре (прямое пороговое падение напряжения), В;
- сопротивление открытого тиристора, Ом;
- среднее значение анодного тока тиристора, А;
- действующее значение анодного тока тиристора, А.
С.2.2 Потери от прямого тока утечки
Когда прямое напряжение приложено между зажимами анодов и катодов GTO/GCT и они в закрытом состоянии, ток утечки от анода к катоду вызывает потери от прямого тока утечки. Обычно потери от прямого тока утечки пренебрежимо малы, потому что прямой ток утечки у тиристора очень мал.
С.2.3 Обратный диод (потери, связанные с прямым падением напряжения)
Потери в открытом диоде
![]() ,
,
где - потери от прямого падения напряжения или в открытом состоянии диода, Вт;
- падение напряжения в открытом состоянии диода (прямое пороговое падение напряжения), В;
- сопротивление диода в открытом состоянии, Ом;
- среднее значение анодного тока диода, А;
- действующее значение анодного тока диода, А.
С.2.4 Коммутационные потери в обратном диоде
Потери в закрытом диоде
![]() ,
,
где ![]() - потери в закрытом состоянии диода, Вт;
- потери в закрытом состоянии диода, Вт;
- обратное напряжение диода, В;
- максимальное значение обратного тока диода, А;
- время восстановления диода, с;
- частота включения диода, которая отличается от частоты коммутации инвертора, с
.
Примечание - Частота включения диода равна или ниже частоты коммутации инвертора; это зависит от топологии схемы, способа управления и режима работы.
С.2.5 Потери в затворе
Мощность в цепи затвора GTO/GCT зависит от тока затвора и напряжения между затвором и катодом. Обычно GTO/GCT требуют больших токов в затворе, вследствие чего потери в затворе становятся больше, чем в обычном тиристоре. Средние потери в затворе могут быть измерены с помощью измерения среднего напряжения ![]() между затвором и катодом и среднего тока затвора
между затвором и катодом и среднего тока затвора ![]() .
.
С.2.6 Коммутационные потери
![]() (суммарные за цикл),
(суммарные за цикл),
где ![]() - коммутационные потери, Вт;
- коммутационные потери, Вт;
- энергия включения за цикл, Дж;
- энергия выключения за цикл, Дж;
![]() - частота переключения, с
- частота переключения, с.
Потери в открытом состоянии:
потери, возникающие за время задержки включения и время нарастания тока
:
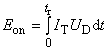 (для одной коммутации),
(для одной коммутации),
где - энергия включения за цикл, Дж;
- анодный ток, А;
- напряжение анод-катод, В;
- время нарастания тока, с.
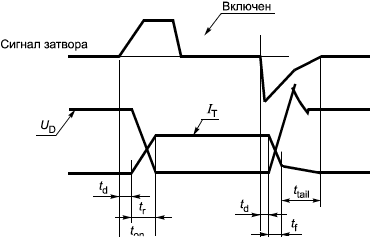
Рисунок С.1 - Формы кривых при коммутации GTO/GCT
Потери в выключенном состоянии:
потери, возникающие за время задержки выключения и время спадания тока
:
![]() (для одной коммутации),
(для одной коммутации),
где - энергия выключения за цикл, Дж;
- энергия выключения при затухании тока, Дж;
- анодный ток, А;
- напряжение анод-катод, В;
- напряжение на открытом запираемом тиристоре, В;
- время затухания тока, с;
- время выключения, с.
Для некоторых применений GTO требуется снаббер, формирующий траекторию переключения, из-за больших запасов зарядов в таких устройствах (см. С.4.3). Обычно при использовании GCT регенерирующая цепочка снаббера не является необходимой.
С.3 Биполярный транзистор с изолированным затвором (IGBT)
С.3.1 Потери в открытом состоянии (потери, связанные с прямым падением напряжения)
Когда IGBT включен (открыт), прямой ток и напряжение насыщения ![]() между коллектором и эмиттером вызывают потери в установившемся режиме, равные
между коллектором и эмиттером вызывают потери в установившемся режиме, равные
![]() ,
,
где - потери от прямого падения напряжения в открытом транзисторе, Вт;
- напряжение на открытом транзисторе (пороговое напряжение в насыщенном состоянии), В;
- сопротивление транзистора в открытом состоянии, Ом;
- среднее значение тока коллектора транзистора, А;
- действующее значение тока коллектора транзистора, А.
С.3.2 Потери от прямого тока утечки
Когда между зажимами коллектора и эмиттера IGBT приложено прямое напряжение и прибор находится в закрытом состоянии, ток утечки от коллектора к эмиттеру вызывает потери от прямого тока утечки. Кроме того, потери также возникают от обратного тока утечки через обратный диод.
С.3.3 Потери, связанные с прямым падением напряжения (потери в обратном диоде в открытом состоянии)
Обратный диод наиболее часто встраивается в модули IGBT. Обычно потери в обратном диоде нельзя измерить и отделить от потерь в IGBT.
![]() ,
,
где - потери от прямого падения напряжения или в открытом состоянии диода, Вт;
- падение напряжения в открытом состоянии диода (прямое пороговое падение напряжения), В;
- сопротивление диода в открытом состоянии, Ом;
- среднее значение анодного тока диода, А;
- действующее значение анодного тока диода, А.
С.3.4 Коммутационные потери в обратном диоде (потери в обратном диоде в закрытом состоянии)
Наиболее часто обратный диод встраивается в модули IGBT. Обычно потери в обратном диоде нельзя измерить и отделить от потерь в IGBT.
С.3.5 Потери в затворе
У IGBT потери в затворе пренебрежимо малы, потому что он имеет полевое управление (MOS control) с высоким полным сопротивлением цепи затвора.
С.3.6 Коммутационные потери
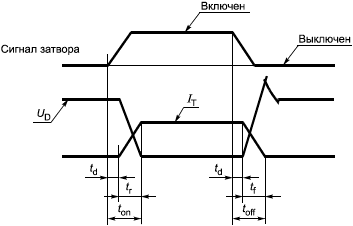
Рисунок С.2 - Формы кривых при коммутации IGBT
Графики изменения переменных при коммутации примерно такие же, как в GTO.
![]() (суммарные за цикл),
(суммарные за цикл),
где ![]() - коммутационные потери, Вт;
- коммутационные потери, Вт;
- энергия включения за цикл, Дж;
- энергия выключения за цикл, Дж;
![]() - частота переключения IGBT, с
- частота переключения IGBT, с.
Потери в открытом состоянии:
потери, возникающие за время задержки включения и время нарастания тока
:
![]() (для одной коммутации),
(для одной коммутации),
где - энергия включения за цикл, Дж;
- ток коллектора, А;
- напряжение коллектор-эмиттер, В;
- время нарастания тока, с.
Потери в выключенном состоянии:
потери, возникающие за время задержки выключения и время спадания тока
:
![]() ,
,
где - энергия выключения за цикл, Дж;
- ток коллектора, А;
- напряжение коллектор-эмиттер, В;
![]() - напряжение насыщения коллектор-эмиттер, В;
- напряжение насыщения коллектор-эмиттер, В;
- время затухания тока, с;
- время выключения, с.
С.4 Потери в цепи снаббера
С.4.1 Шунтирующий снаббер тиристора
Потери в шунтирующем снаббере можно выбирать в виде
![]() ,
,
![]() ,
,
![]() ,
,
где - полные потери в снаббере, Вт;
- потери в снаббере при частоте сети, Вт;
- коммутационные потери в снаббере, Вт;
- сопротивление снаббера, Ом;
- емкость снаббера, Ф;
- линейное напряжение, В;
- частота преобразователя (тиристорный преобразователь - со стороны сети: частота сети, тиристорный инвертор - со стороны двигателя: частота на выходе инвертора), с
;
- угол задержки триггера, град;
- угол перекрывания, град;
- число тиристоров в стойке.
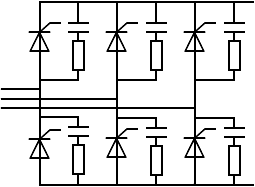
Рисунок С.3 - Трехфазная мостовая схема включения тиристоров
С.4.2 Инверторы напряжения со снаббером в звене постоянного тока
Рисунок С.4 - Снаббер в звене постоянного тока
Потери в сопротивлении снаббера можно выразить как:
![]() ,
,
где - потери в сопротивлении снаббера, Вт;
- индуктивность основной цепи в период переключения, Гн;
- ток выключения, А;
- частота переключения, с
.
Потери в диоде снаббера:
в этом случае потери в диоде пренебрежимо малы по сравнению с потерями в резисторе.
С.4.3 Потери в рекуперирующем снаббере
В схемах некоторых преобразователей могут быть использованы рекуперирующие снабберы.
В этом случае учитывают потери в каждом элементе такой схемы.
С.4.4 Потери в цепи коммутации
Существенным элементом тиристорного инвертора является коммутационная цепь.
Потери в коммутационной цепи включают в себя потери в коммутирующем конденсаторе, потери в коммутирующем реакторе и потери в других силовых элементах.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации (и действующим в этом качестве межгосударственным стандартам)
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
МЭК 60034-1:2004 | MOD | ГОСТ Р 52776-2007 (МЭК 60034-1:2004) "Машины электрические вращающиеся. Номинальные данные и характеристики" |
МЭК 60034-2-1:2007 | IDT | ГОСТ Р МЭК 60034-2-1-2009 "Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава)" |
МЭК 60034-5:2006 | IDT | ГОСТ Р МЭК 60034-5-2007 "Машины электрические вращающиеся. Часть 5. Классификация степеней защиты, обеспечиваемых оболочками вращающихся электрических машин (Код IP)" |
МЭК 60034-6:1991 | MOD | ГОСТ 20459-87 "Машины электрические вращающиеся. Методы охлаждения. Обозначения" |
МЭК 60034-7:2001 | - | * |
МЭК 60034-9:1997 (2003) | MOD | ГОСТ Р 53148-2008 "Машины электрические вращающиеся. Предельные уровни шума" |
МЭК 60034-14:1996 (2007) | IDT | ГОСТ Р МЭК 60034-14-2008 "Машины электрические вращающиеся. Часть 14. Механическая вибрация некоторых видов машин с высотой оси вращения 56 мм и более. Измерения, оценка и пределы вибрации" |
МЭК 60034-17:1998 (2006) | IDT | ГОСТ Р МЭК/ТС 60034-17-2009 "Машины электрические вращающиеся. Часть 17. Руководство по применению асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей" |
МЭК 60034-18-31:1992 | - | * |
МЭК 60038:1983 (2009) | - | * |
МЭК 60050-111:1996 | - | * |
МЭК 60050-151:2001 | - | * |
МЭК 60050-351:1998 | - | * |
МЭК 60050-441:1984 | - | * |
МЭК 60050-551:1998 | - | * |
МЭК 60050-601:1985 | - | * |
МЭК 60076-1:2000 (2011) | IDT | ГОСТ 30830-2002 (МЭК 60076-1-93) "Трансформаторы силовые. Часть 1. Общие положения" |
МЭК 60076-2:1993 (2011) | - | * |
МЭК 60076-3:2000 | - | * |
МЭК 60076-5:2000 | - | * |
МЭК 60076-8:1997 | - | * |
МЭК 60146-1-1:1991 (2009) | - | * |
МЭК 60146-1-2:1991 | - | * |
МЭК 60146-1-3:1991 | - | * |
МЭК 60146-2:1999 | - | * |
МЭК 60146-6:1992 | - | * |
МЭК 60204-11:2000 | - | * |
МЭК 60417 (все части) | - | * |
МЭК 60529:1989 | IDT | ГОСТ 14254-96 (МЭК 529-89) "Степени защиты, обеспечиваемые оболочками (код IP)" |
МЭК 60664-1:2000 | - | * |
МЭК 60721-3-1:1997 | - | * |
МЭК 60721-3-2:1997 | - | * |
МЭК 60721-3-3:1994 | - | * |
МЭК 60076-11(2004) | - | * |
МЭК 61000-2-4:1994 (2002) | MOD | ГОСТ Р 51317.2.4-2000 (МЭК 61000-2-4-94) "Совместимость технических средств электромагнитная. Электромагнитная обстановка. Уровни электромагнитной совместимости для низкочастотных кондуктивных помех в системах электроснабжения промышленных предприятий" |
МЭК 61000-4-7:1991 (2009) | MOD | ГОСТ Р 51317.4.7-2008 (МЭК 61000-4-7:2002) "Совместимость технических средств электромагнитная. Общее руководство по средствам измерений и измерениям гармоник и интергармоник для систем электроснабжения и подключаемых к ним технических средств" |
МЭК/TR 61800-6 (2003) | - | * |
МЭК 61378-1:1997 (2011) | - | * |
МЭК 61800-2:1998 | - | * |
МЭК 61800-3:1996 (2012) | - | * |
ИСО 1680:1999 | - | * |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. | ||
__________________________________________________________________________
УДК 621.313.3 МКС 29.160.30; 29.200 Е60
Ключевые слова: машины электрические вращающиеся, силовые приводы переменного тока
__________________________________________________________________________
Электронный текст документа
и сверен по:
, 2014
