ГОСТ Р МЭК/ТС 60034-17-2009
Группа Е60
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ
Часть 17
Руководство по применению асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей
Rotating electrical machines. Part 17. Application guide for cage induction motors when fed from converters
ОКС 29.160
Дата введения 2011-01-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 ПОДГОТОВЛЕН Государственным образовательным учреждением высшего профессионального образования "Московский энергетический институт (технический университет)" (ГОУВПО "МЭИ (ТУ)")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 333 "Вращающиеся электрические машины"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 декабря 2009 г. N 640-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 60034-17:2006* "Машины электрические вращающиеся. Часть 17. Асинхронные двигатели с короткозамкнутым ротором при питании от преобразователей. Руководство по применению" (IEC/TS 60034-17:2006 "Rotating electrical machines - Part 17: Cage induction motors when fed from converters - Application guide") и представлен впервые
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации и межгосударственные стандарты, сведения о которых приведены в справочном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт определяет критерии выбора компонентов частотно-регулируемого электропривода и их влияние на работу двигателя в составе этого электропривода.
Настоящий стандарт распространяется на асинхронные трехфазные короткозамкнутые двигатели, выполненные в соответствии с МЭК 60034-12, при их питании от преобразователей частоты с промежуточным звеном постоянного тока, содержащих инверторы тока или напряжения без ограничений на количество, ширину и частоту импульсов, а также вид ключей инвертора, будь они тиристорные или транзисторные любого типа.
Стандарт не распространяется на машины, специально предназначенные для питания от преобразователей частоты. На эти машины распространяется МЭК 60034-25.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты*:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
МЭК 60034-1:2004 Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики (IEC 60034-1:2004, Rotating electrical machines - Part 1: Rating and performance)
МЭК 60034-12:2007 Машины электрические вращающиеся. Часть 12. Пусковые характеристики односкоростных трехфазных двигателей с короткозамкнутым ротором (IEC 60034-12:2007, Rotating electrical machines - Part 12: Starting performance of single-speed three-phase cage induction motors)
МЭК 60034-25:2007 Машины электрические вращающиеся. Часть 25. Руководство по конструкции и эксплуатационным характеристикам двигателей переменного тока, специально предназначенным для электропитания через преобразователь (IEC/TS 60034-25:2007, Rotating electrical machines - Part 25: Guidance for the design and performance of a.с. motors specifically designed for converter supply)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Характеристики двигателя
В период коммутации ток инвертора проходит по статорным обмоткам двигателя, поэтому для правильного выбора цепи коммутации необходимо знать эквивалентную схему асинхронного двигателя.
В случае инвертора напряжения эквивалентная схема не столь важна, однако сопротивления двигателя высокочастотным составляющим сильно влияют на потери от гармонических составляющих.
Указанные обстоятельства требуют правильного функционирования преобразователя. Если предъявляются повышенные требования к величине потерь или дополнительного (высокочастотного) момента при работе инвертора, необходима информация об эквивалентной схеме замещения двигателя для всего спектра гармоник при питании статорных обмоток.
Ввиду разнообразия конструкции проводников ротора (медные с углубленным пазом, алюминиевые с двойной клеткой), а также широкого спектра частот гармоник не удается представить универсальную схему замещения двигателя. Как правило, для расчета гармонических моментов и потерь недопустимо использовать параметры схемы замещения в установившемся режиме работы двигателя при номинальной частоте. Производитель двигателя может предоставить необходимые параметры схемы замещения, только если ему известен спектральный состав напряжения и/или тока инвертора.
4 Частотный спектр напряжения и тока
Для учета снижения момента и его высокочастотных составляющих необходимо знать частотный спектр напряжения в случае инвертора напряжения или тока в случае инвертора тока.
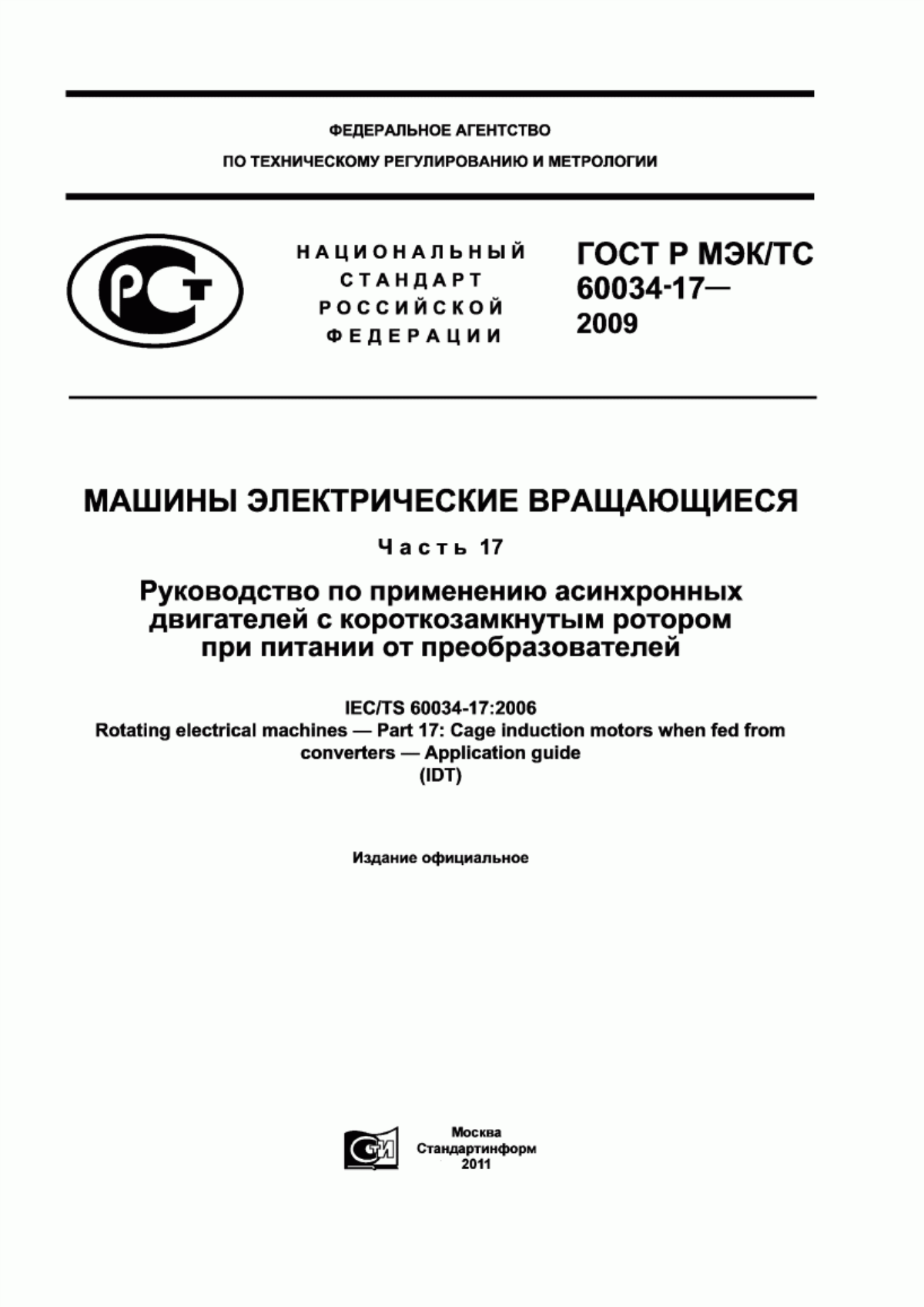
На рисунке 1 показана типичная форма тока фазы двигателя, питающегося от преобразователя с инвертором тока. Присутствуют гармоники с номерами 5, 7, 11, 13, ... . Относительный гармонический состав зависит от времени коммутации у разных преобразователей может отличаться.
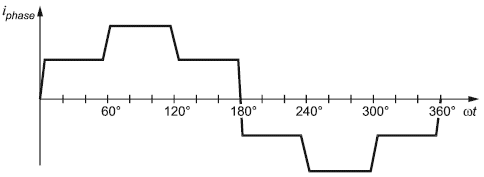
Рисунок 1 - Форма (идеализированная) фазного тока при питании соединенных в треугольник обмоток двигателя от инвертора тока
На рисунке 2 показана характерная форма линейного напряжения при работе инвертора напряжения с широтно-импульсной модуляцией (ШИМ-инвертора).
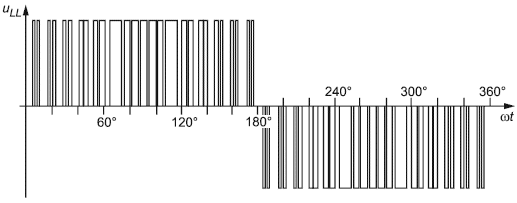
Рисунок 2 - Форма линейного напряжения при питании от инвертора напряжения с частотой коммутации
![]()
В инверторах напряжения используются различные способы модуляции, поэтому невозможно сформулировать общую для всех способов оценку влияния гармоник. Чтобы оценить это влияние в частном случае, необходимо проанализировать воздействие на двигатель выходного напряжения инвертора, зная его конкретный гармонический состав.
Спектр выходного напряжения часто используемых инверторов с синхронной или асинхронной последовательностью широтно-модулированных импульсов содержит частоты
![]() ,
,
где 1, 2, 3, ... и
1, 2, 4, 5, 7, ... - кратности несущей
и рабочей частоты
соответственно. Данная формула действительна также и для инверторов с широтно-фазовой (векторной) модуляцией.
В случаях, когда применяют преобразователи с переменной частотой коммутации, спектр частоты их выходного напряжения представляет собой широкополосный случайный шум без пиков на характерных частотах.
В преобразователях с широтно-импульсной модуляцией низкочастотные гармонические составляющие малы, а высокочастотные гармоники, определяемые частотой коммутации, демпфируются индуктивностями двигателя.
В МЭК 60034-1, пункт 7.2.1, гармонический состав питающего напряжения для асинхронных короткозамкнутых двигателей определен единственной числовой величиной, называемой коэффициентом искажения синусоидальности напряжения (HVF - Harmonic Voltage Factor), однако этот коэффициент неприменим для двигателей, питаемых от преобразователей частоты.
5 Потери, вызываемые гармониками
Высшие гармоники напряжения и тока в асинхронном короткозамкнутом двигателе, питаемом от инвертора, вызывают дополнительные потери в стали и обмотках статора и ротора.
Для двигателей, питающихся от инверторов напряжения, дополнительными потерями в стали нельзя пренебрегать. Они зависят от амплитуды гармонических составляющих фазных напряжений и почти не зависят от частоты.
Токи гармоник, определяющие потери в обмотках двигателя, ограничиваются индуктивностями рассеяния этих обмоток. Хотя токи этих гармоник и невелики, потерями от них в обмотках также нельзя пренебрегать из-за вытеснения тока (поверхностный эффект, скин-эффект) на высоких частотах. Это обстоятельство применимо как к катушечным, так и всыпным обмоткам. Роторы с явно выраженным эффектом вытеснения особенно чувствительны к этим потерям.
Многочисленными испытаниями установлено, что общее количество дополнительных потерь, вызываемых гармониками, не зависит от нагрузки. Оно падает с увеличением частоты коммутации, как показано на рисунке 3, что обусловлено уменьшением потерь в обмотках на высоких частотах коммутации.
1 - общие потери, вызываемые гармониками; 2 - потери в обмотках; 3 - потери в стали
Рисунок 3 - Пример зависимости потерь , вызываемых гармониками относительно потерь
на рабочей частоте
, от частоты коммутации
в случае питания от инвертора напряжения
В случае питания двигателей от инвертора тока дополнительные потери в стали невелики, исключение составляют так называемые коммутационные потери. Быстрое изменение потоков рассеяния на интервале коммутации вызывает вихревые токи в зубцах статора и ротора. В случае инвертора напряжения данные потери отсутствуют, поскольку коммутационные токи не протекают по обмоткам двигателя.
Дополнительные потери в роторных обмотках особо важно учитывать из-за большой амплитуды токов гармоник на низких частотах.
Для расчета дополнительных потерь нет простых методов, а также отсутствуют общие рекомендации по оценке их величины. Их зависимость от различных физических параметров весьма сложна. Они в большой степени зависят от типа преобразователя (с инвертором тока или напряжения, с различной частотой коммутации и формой импульсов) и двигателя (типа обмотки, геометрии паза и потерь в стали). Качество изготовления сердечника - также важный фактор.
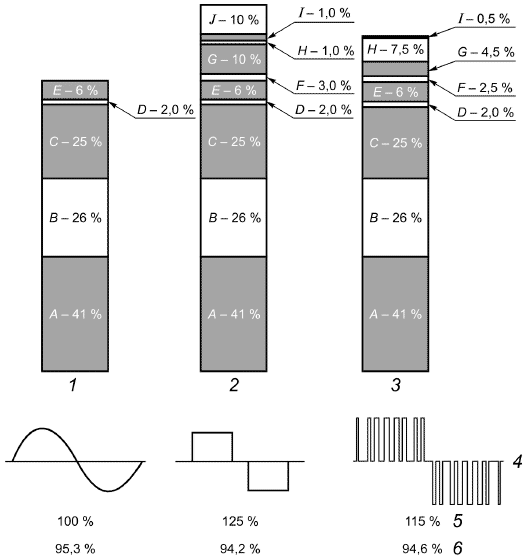
Для примера на рисунке 4 в виде столбцовых диаграмм показаны результаты расчета составляющих потерь в двигателе (габарит 315 мм, конструкция ), питаемом от инверторов двух типов с различной формой и соответственно гармоническим составом питающего напряжения, а также от сети с синусоидальным напряжением. Данный пример иллюстрирует существенное различие составляющих потерь при использовании самых распространенных в настоящее время инверторов. Приведенные диаграммы не могут быть распространены на другие типы двигателей и инверторов. Для облегчения сравнения напряжения и токи при работе инверторов взяты такими же, как при работе в номинальном режиме.
Потери, вызываемые рабочей частотой | Потери, вызываемые гармониками |
|
|
|
|
|
|
|
|
|
|
1 - синусоидальное напряжение; 2 - инвертор тока; 3 - инвертор напряжения с ШИМ; 4 - диаграммы напряжения; 5 - потери; 6 - КПД
Рисунок 4 - Влияние инвертора на потери в асинхронном короткозамкнутом двигателе (315 мм типа ) при номинальном токе и скорости
В соответствии с рисунком 4 потери, вызываемые гармониками, при использовании инверторов тока больше, чем при питании от инвертора напряжения. Разница уменьшается при частичной нагрузке, поскольку данные потери постоянны при питании от инверторов напряжения, однако увеличиваются с ростом нагрузки при использовании инверторов тока.
6 Снижение момента при работе от преобразователя
При работе от преобразователя двигатель при номинальной скорости имеет меньший допустимый момент, чем при работе от сети, из-за повышенного нагрева от потерь, вызываемых гармониками. Вторая причина уменьшения момента - падение напряжения преобразователя. Эксплуатация двигателя при номинальной нагрузке в таком случае снижает долговечность изоляции.
Сплошная линия на рисунке 5 представляет связь напряжения с частотой, обеспечивающую примерное постоянство потока при синусоидальном питании. Производитель двигателя может определить превышение температуры при известном спектральном составе напряжения инвертора. Это превышение зависит от особенностей конструкции двигателя и системы охлаждения. Для определения кратности снижения момента важен запас двигателя по нагреву. С учетом названных обстоятельств кратность допустимого момента лежит в пределах от 0,8 до 1,0.
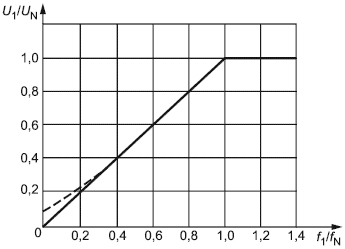
Рисунок 5 - Зависимость напряжения от частоты
На практике часто номинальные данные преобразователя не учитывают то обстоятельство, что основной поток двигателя при питании от него отличается от потока при питании от синусоидального напряжения. В результате момент отклоняется на величину, определяемую конкретными параметрами двигателя и преобразователя.
В диапазоне регулирования вниз от скорости, соответствующей номинальной частоте, выполнение закона ![]() позволяет поддерживать момент лишь в случае пренебрежимо малой величины сопротивления статора по сравнению с остальными сопротивлениями в схеме замещения. Для компенсации влияния сопротивления статора на момент, которое особенно заметно на низких частотах, управление преобразователем строится по характеристике, показанной пунктиром на рисунке 5.
позволяет поддерживать момент лишь в случае пренебрежимо малой величины сопротивления статора по сравнению с остальными сопротивлениями в схеме замещения. Для компенсации влияния сопротивления статора на момент, которое особенно заметно на низких частотах, управление преобразователем строится по характеристике, показанной пунктиром на рисунке 5.
При увеличении частоты выше номинальной (![]() 1,0) напряжение обычно поддерживается на уровне номинального (управление с ослаблением поля). В этом случае перегрузочная способность двигателя по моменту (кратность допустимого момента
1,0) напряжение обычно поддерживается на уровне номинального (управление с ослаблением поля). В этом случае перегрузочная способность двигателя по моменту (кратность допустимого момента ![]() ) при увеличении частоты уменьшается, как показано на рисунке 6.
) при увеличении частоты уменьшается, как показано на рисунке 6.
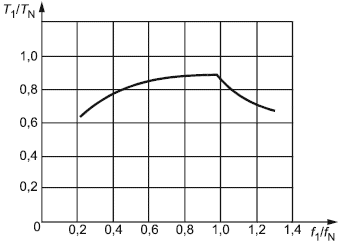
Рисунок 6 - Кратность допустимого момента короткозамкнутого асинхронного двигателя типа (с самовентиляцией) в зависимости от частоты при питании от инвертора тока
На рисунке 6 представлена типичная характеристика зависимости допустимого момента от частоты при питании от инвертора тока. При использовании инвертора напряжения аналогичная характеристика имеет похожий вид. Данные кривые могут быть представлены производителем двигателя, если ему известны частотный спектр и зависимость напряжение - частота преобразователя. Поскольку типы и параметры систем вентиляции у двигателей значительно отличаются (самовентиляция или независимое охлаждение), не существует универсальной кривой, характеризующей зависимость допустимого момента от частоты. В общем случае двигатели, питаемые от преобразователей с ШИМ-регулированием напряжения (частота коммутации в диапазоне нескольких килогерц), требуют меньшего снижения допустимого момента, чем питаемые от преобразователей с амплитудным регулированием напряжения. Увеличение частоты коммутации приводит к увеличению допустимого момента.
7 Пульсации момента
Постоянные вращающие асинхронные моменты, вызываемые гармониками, оказывают незначительное влияние на работу электропривода. Однако это не относится к пульсирующим составляющим момента, вызывающим вибрацию механических частей привода.
В электроприводах с трехфазными асинхронными двигателями, питаемыми от инверторов тока, выполненных по шестипульсной схеме, практически значимыми являются пульсации момента с частотой 6- и 12-кратной по отношению к рабочей . Амплитуда пульсаций на частоте 6
может достигать 15% номинального момента, а на частоте 12
- 5%. Кроме того, эти колебания момента обусловлены гармониками пульсаций постоянного тока в промежуточном звене преобразователя. Эти составляющие момента имеют частоты, равные 6
![]() и 12
и 12![]() , где
, где - частота сети. Для приводов с малым демпфированием трансмиссии рекомендуется проводить точный расчет резонансных частот колебаний механической части. Для некоторых применений необходимо исключать из рабочего диапазона преобразователя определенную полосу недопустимых частот колебаний.
В электроприводах с ШИМ-инверторами частота основных пульсаций момента определяется частотой коммутации, а амплитуда - шириной импульсов. Амплитуда этих пульсаций может достигать 15% номинального момента в приводах с современными инверторами, у которых частота коммутации более чем в 10 раз превышает рабочую частоту. При больших частотах коммутации (порядка 21) и соответствующем способе модуляции импульсов (например, модуляция по синусоидальному заданию или векторная модуляция) пульсации момента с частотами 6
и 12
не имеют практического значения. Кроме вышеупомянутых возникают пульсации момента с двойной частотой коммутации, которые, однако, не оказывают заметного отрицательного влияния на привод, если только эта частота не совпадет с резонансной частотой колебаний механической части.
8 Электромагнитные источники шума
Электромагнитный шум в асинхронных двигателях вызывается радиальными периодическими усилиями, возникающими в статоре. Эти так называемые максвелловы силы обязаны взаимодействию магнитных полей в зазоре. Усилия характеризуются амплитудой, частотой и формой. Поскольку их амплитуда мала, основное влияние выражается в возникновении шума при совпадении частоты усилий с собственной частотой сердечника статора.
При синусоидальном питании электромагнитный шум обусловлен пространственными гармониками полей в зазоре. При проектировании двигателя стараются избежать появления резонанса во всех режимах работы машины. Однако ввиду широкого спектра полевых гармоник при большом диапазоне регулирования скорости двигателя не удается избежать заметного шума на некоторых скоростях даже при синусоидальном питании. Поэтому часто практикуется указание достаточно узкого частотного диапазона, в котором запрещается работать во избежание недопустимо большого уровня звука.
Все вышеназванные обстоятельства справедливы и в случае питания двигателя от инвертора. В этом случае дополнительно гармоники полей от несинусоидального напряжения инвертора суммируются с основными пространственными гармониками поля, которые определяются числом пар полюсов . Поэтому условно частотный характер радиальных усилий можно связать с фактором
, который принимает значение 0 либо 2
. Собственные частоты электромагнитных шумов двигателей зависят от их габаритов и полюсности. Для двух- и четырехполюсных машин резонансные частоты примерно могут быть оценены следующим образом:
высота оси <200 мм |
|
|
|
высота оси >280 мм |
|
|
|
При питании асинхронного двигателя от инвертора тока шум обусловлен гармониками тока, амплитуда которых, как правило, связана с их порядком, но частоты возбуждаемых ими сил отличны от собственных частот активных частей статора. Таким образом, уровень шума в этом случае аналогичен тому, который имеет место при работе двигателя с постоянным потоком и токами, и лишь незначительно зависит от управления преобразователем и конструкции двигателя. Как показывает практика, уровень звука повышается на 1-6 дБ по шкале А при регулировании скорости до номинальной по сравнению с уровнем при синусоидальном питании номинальным напряжением и частотой. Верхний предел соответствует двигателям с исходно низким уровнем шума.
При питании асинхронного двигателя от инвертора напряжения частоты гармоник поля близки к несущей частоте или кратны ей. В зависимости от частоты коммутации и принципа управления инвертором желательно, чтобы собственные частоты магнитопровода статора при 0 и
![]() были близки к таковым при питании от инвертора тока. Изменение частоты коммутации и тип модуляции напряжения значительно влияют на амплитуду гармоник поля и соответственно на радиальные усилия и уровень шума. Как правило, инверторы с постоянной несущей частотой вызывают больший электромагнитный шум, чем инверторы с управляемым или случайным заданием частоты коммутации. Таким образом, в электроприводах с инверторами напряжения уровень шума при регулировании скорости растет в более широком диапазоне, чем при питании двигателя от инвертора тока. Как показывает практика, уровень звука по сравнению с синусоидальным питанием номинальным напряжением и частотой возрастает в пределах от 1 до 15 дБ по шкале А.
были близки к таковым при питании от инвертора тока. Изменение частоты коммутации и тип модуляции напряжения значительно влияют на амплитуду гармоник поля и соответственно на радиальные усилия и уровень шума. Как правило, инверторы с постоянной несущей частотой вызывают больший электромагнитный шум, чем инверторы с управляемым или случайным заданием частоты коммутации. Таким образом, в электроприводах с инверторами напряжения уровень шума при регулировании скорости растет в более широком диапазоне, чем при питании двигателя от инвертора тока. Как показывает практика, уровень звука по сравнению с синусоидальным питанием номинальным напряжением и частотой возрастает в пределах от 1 до 15 дБ по шкале А.
9 Срок службы изоляции
Система изоляции электрической машины при ее питании от преобразователя испытывает гораздо большее число неблагоприятных факторов, чем при питании от синусоидальной сети.
При питании двигателей от инверторов тока с "медленной" коммутацией, как это имеет место в тиристорных инверторах, на интервалах коммутации возникают импульсы перенапряжения, оказывающие воздействие на основную и межвитковую изоляцию. Однако коммутационные пики обычно не приводят к разрушению изоляции, поскольку время их нарастания довольно велико, а частота следования достаточно мала.
При питании двигателя от инверторов напряжения, укомплектованных, как правило, IGBT-транзисторами, имеющими высокую частоту коммутации, значительный темп нарастания напряжения оказывает существенное влияние на межвитковую изоляцию, особенно в зоне крайних витков. Неблагоприятное воздействие на изоляцию обмотки зависит от величины импульсов, темпа их нарастания, частоты следования, параметров и длины кабеля, соединяющего инвертор с двигателем, геометрии обмотки и других факторов.
Двигатели со всыпными обмотками, с эмалированными круглыми проводниками обычно выдерживают импульсное напряжение, допустимая амплитуда которого представлена на рисунке 7, без заметного снижения срока службы изоляции.
Взаимодействие инвертора с высокой частотой коммутации и соединительного кабеля вызывает импульсы перенапряжения, определяемые влиянием соединительной линии. Двигатели номинальным напряжением до 500 В удовлетворительно переносят импульсы, допустимая величина которых представлена на рисунке 7, без сокращения срока службы. Особое внимание следует уделить приводам с быстрым изменением скорости, так как в этом случае на выходе преобразователя может быть сформировано напряжение до двукратного по отношению к номинальному.
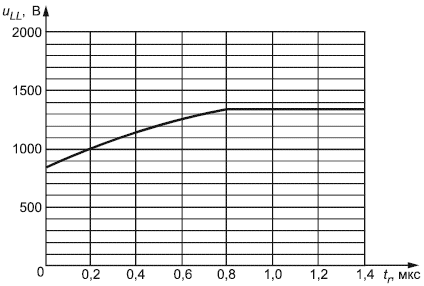
Рисунок 7 - Зависимость допустимой амплитуды импульса напряжения на зажимах двигателя от времени нарастания импульса
Для асинхронных двигателей на напряжение выше 500 В, питаемых от инверторов с высокой частотой коммутации, требуется специальная изоляция и/или применение дополнительных фильтров на выходе инвертора.
Рисунок 8 иллюстрирует термины, которые применяются при анализе процесса питания обмоток импульсным напряжением.
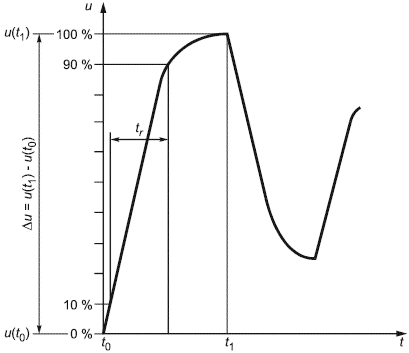
Рисунок 8 - Определение времени нарастания импульса
Перепад напряжения - разница между мгновенными значениями напряжения непосредственно до и после возникновения импульса. Импульс заканчивается в момент, когда напряжение достигает своего первого максимума. Время нарастания импульса
определяется как интервал между моментами, когда напряжение составляет 10% и 90% перепада напряжения
.
С позиций комплекса взаимодействий рекомендуется тщательная конструктивная проработка всего комплекта привода.
10 Токи через подшипники
При работе двигателя от сети с синусоидальным напряжением кольцевой поток ярма статора наводит осевую электродвижущую силу (ЭДС) в контуре, образуемом валом, подшипниками, фланцем и корпусом, как показано на рисунке 9. Кольцевой поток вызван неоднородностями ярма (ласточкин хвост для крепления ярма, вентиляционные каналы, магнитная анизотропия пластин). Обычно осевая ЭДС определяется частотой питания и троекратной ей частотой, вызванной нелинейностью цепи намагничивания. Опыт показывает, что если осевая ЭДС не превышает 500 мВ, то не возникает необходимости в дополнительных защитных устройствах. В противном случае через подшипники проходят токи, которые в течение короткого времени могут их разрушить. Изоляция подшипника, особенно на заднем конце вала, обычно достаточна для того, чтобы избежать прохождения токов через оба подшипника и механические части привода, соединяющие его с нагрузкой. Данная изоляция не является необходимой для двигателей, выпущенных в соответствии с современными требованиями и питающихся от синусоидального напряжения.
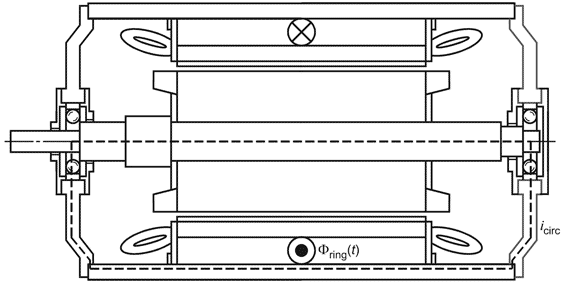
Рисунок 9 - Кольцевой ![]() , определяющий осевую ЭДС и паразитный ток
, определяющий осевую ЭДС и паразитный ток
При питании от преобразователя с инвертором тока осевая ЭДС слабо зависит от гармонического состава питающего тока. Поэтому рекомендуется тот же, как и для синусоидального питающего напряжения, верхний предел максимального напряжения 500 мВ для определения необходимости применения специальных мер.
Совершенно иная природа токов через подшипники характерна при питании двигателя от преобразователя с инвертором напряжения. Так называемые помехи (высокочастотные составляющие тока и напряжения) питания двигателя обусловлены топологией и алгоритмом управления инвертора и состоят из частотных компонент, зависящих от гармонического состава выходного напряжения инвертора. Их максимальная величина находится в пределах 50% постоянного напряжения в звене постоянного тока преобразователя частоты или в пределах 72% линейного напряжения на входе инвертора в случае применения 6-фазного неуправляемого выпрямителя. Поскольку помехи во всех обмотках синфазны, их можно рассматривать как нулевую последовательность в составе напряжения. Эквивалентная цепь для помех показана на рисунке 10. При питании от преобразователя в отличие от синусоидального питания от сети большую роль на высоких частотах играют емкостные составляющие сопротивлений. Амплитуда помех зависит от сопротивления (в основном реактивной составляющей) цепи, по которой они протекают. Данная цепь замыкается в нулевой точке инвертора. В общем случае паразитные токи проходят через подшипники двигателя по трем контурам, детальное описание которых приводится ниже.
Паразитный ток, проходящий по описанной выше цепи, вызванный индуцированной кольцевым потоком высокочастотной ЭДС, обусловлен только емкостями между витками и сердечником и не связан с неоднородностями ярма статора. Данный ток утечки приводит к появлению разности токов на обеих сторонах витков катушки и в конечном счете - к кольцевому потоку в соответствии с законом Ампера.
Максимальное значение осевой ЭДС в зависимости от частоты коммутации, формы импульсов и скорости двигателя может превышать 10 В и пробивать смазочную пленку подшипников, вызывая их разрушение. Как показывают испытания, ток может иметь место на основной частоте питания и третьих гармониках даже при амплитуде осевой ЭДС менее 500 мВ. Поэтому при питании от преобразователя более предпочтительны двигатели с низким значением осевой ЭДС.
При необходимости измерения осевой ЭДС при питании от преобразователя следует использовать специальное измерительное оборудование и экранированные кабели, чтобы высокочастотные помехи не исказили результаты измерений.
Импульсные емкостные токи через подшипники, главным образом на приводном конце вала, растут, если осевая ЭДС становится соизмеримой с разностью потенциалов нулевых точек инвертора и двигателя. Эта конфигурация предпочтительна в случае, когда двигатель и приводимый им механизм соединены проводящей трансмиссией, а двигатель неправильно заземлен. Амплитуды токов более 10 А в двигателях с высотой вала выше 315 мм выводили из строя подшипники в течение нескольких сотен часов.
Емкостное напряжение, иногда называемое подшипниковым, может быть измерено в радиальном зазоре подшипника, если сердечник и корпус двигателя правильно заземлены (рисунок 10). Подшипниковое напряжение является зеркальным отображением напряжения помехи, а его отношение к напряжению помехи зависит от емкостных сопротивлений между обмоткой статора и ротором, ротором и корпусом, а также емкости самого подшипника. Измерения этого напряжения показывают, что его максимум обычно достигает 10-30 В. В случае, когда оно достигает напряжения пробоя, возникают кратковременные разрядные токи. Частота повторения этих токов растет с ростом подшипникового напряжения и частоты коммутации. Измерения показывают, что максимальное значение токов пробоя составляет несколько ампер при 50-100 импульсах за 20 мс. Разрядные токи не могут быть исключены только изоляцией подшипников. Они приводят к образованию раковин на дорожках подшипников, что может быть идентифицировано по усилению шума подшипников.
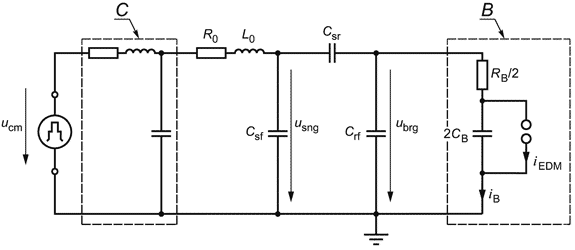
- подшипник;
- кабель;
- емкость статор-ротор;
- емкость подшипника;
- емкость статор-корпус;
- емкость ротор-корпус;
- ток через подшипник;
- ток пробоя;
- индуктивность рассеяния;
- сопротивление подшипника;
- сопротивление обмотки;
- напряжение нейтрали статора-земля;
- напряжение подшипника;
- напряжение помехи
Рисунок 10 - Схема цепи паразитного тока и подшипниковое напряжение
Практика эксплуатации правильно заземленных электроприводов с преобразователями частоты свидетельствует о следующем.
В двигателях, на которые распространяется действие настоящего стандарта, с высотой вала до 280 мм, как показывает опыт, подшипники редко выходят из строя по вине преобразователя. Тем не менее можно утверждать, что диэлектрический износ в значительной степени зависит от способа управления и частоты коммутации инвертора. Применение инверторов с частотой коммутации выше 10 кГц и напряжением более 499 В требует внимания к изоляции подшипника.
Для двигателей, на которые распространяется действие настоящего стандарта, эффект может быть достигнут заменой подшипника на изолированный с аналогичными размерами. Для двигателей с высотой вала 315 мм и выше сопротивление изоляции должно составлять 100 Ом на 1 МГц.
Необходимость изоляции обоих подшипников возникает редко. Если все же она возникла, настоятельно рекомендуется провести экспертизу всей системы электропривода, включая изоляцию механических соединений вала приводного двигателя и системы заземления (возможно использование заземляющей щетки).
Для двигателей, на которые распространяется действие настоящего стандарта, с высотой вала 315 мм и выше, для которых невозможно применение изолированных подшипников, рекомендуется следующее:
- уменьшение выходного напряжения инвертора;
- использование инвертора с фильтром, рассчитанным на сглаживание напряжения помехи.
11 Электрические и механические соединения, заземление
Для устранения отрицательного влияния напряжения помехи на подшипники необходимо всеми возможными способами исключить протекание паразитных токов внутри машины. Например, можно паразитные токи замкнуть на инвертор через защитный экран кабеля или заземление двигателя.
Для выполнения этого требования (и одновременно требований по электромагнитной совместимости) необходимо использовать экранированные многожильные кабели. Экран должен быть выполнен из меди или алюминия, чтобы уменьшить сопротивление, в частности, и на высоких частотах, и оба его конца должны присоединяться к -проводнику. Рекомендуются кабели, в которых заземленные проводники расположены симметрично фазным. Если экран используется как защитный проводник, его проводимость должна иметь соответствующее значение.
При монтаже кабеля должна быть обеспечена связь по высокой частоте оболочек двигателя и преобразователя. Поэтому необходимо, чтобы клеммная коробка двигателя была выполнена из проводящего материала и была потенциально связана с его корпусом. Сопротивление между корпусом двигателя и экраном кабеля или заземленными проводниками должно составлять менее 1 Ом на частоте 1 МГц.
Все открытые металлические части установки должны быть заземлены в соответствии с требованиями электробезопасности. В случае питания двигателя от преобразователя все соединения также должны иметь малое сопротивление на высоких частотах. Для этих целей рекомендуются широкие медные плетеные проводники.
Такие же проводники должны соединять корпус двигателя с клеммной коробкой для выравнивания их потенциалов.
В зависимости от условий заземления приводимой двигателем машины в ряде случаев при высоте вала более 315 мм необходима потенциальная связь между двигателем и механизмом. Типичным примером могут служить заземляемые насосы, соединенные с двигателем металлической муфтой.
Дополнительные устройства, например тахометры, должны быть изолированы от двигателя во избежание паразитных токов. Экран соединительного провода должен быть заземлен на преобразователе, но изолирован от корпуса датчика. Для энкодера предпочтительно двойное экранирование. Кабели дополнительных устройств должны быть проложены отдельно от силовых кабелей.
12 Допустимая частота вращения
Если двигатель должен работать при скоростях выше номинальной, максимальная допустимая скорость определяется МЭК 60034-1, пункт 9.6. В зависимости от конструкции двигателя работа на повышенных скоростях допустима по согласованию с производителем.
При скоростях выше номинальной увеличиваются шум и вибрация. Поэтому может потребоваться уточнение допустимых параметров режимов работы для скоростей выше номинальной.
Работа на скоростях, близких к максимальной, в течение продолжительного периода времени может привести к заметному уменьшению ресурса подшипников. Более того, могут сократиться ресурс уплотнительных соединений вала, а также период обслуживания системы смазки.
13 Коэффициент мощности
Повышение коэффициента мощности на входе преобразователя частоты не следует предпринимать без гармонического анализа.
Не рекомендуется присоединение силовых конденсаторов к двигателю для коррекции коэффициента мощности, поскольку они могут явиться причиной выхода инвертора из строя, а с другой стороны, обычно компенсирующие конденсаторы не рассчитаны на такие высокие частоты, которые в данном случае имеют место.
Повышение коэффициента мощности на входе преобразователя частоты с инвертором напряжения возможно путем использования инвертора с активным задним фронтом.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации (и действующим в этом качестве межгосударственным стандартам)
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
МЭК 60034-1:2004 | MOD | ГОСТ Р 52776-2007 (МЭК 60034-1:2004) "Машины электрические вращающиеся. Номинальные данные и характеристики" |
МЭК 60034-12:2007 | * | |
МЭК 60034-25:2007 | * | |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - MOD - модифицированные стандарты. | ||
Электронный текст документа
и сверен по:
, 2011
