ГОСТ Р ИСО 11783-2-2021
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Тракторы и машины для сельского и лесного хозяйства
ПОСЛЕДОВАТЕЛЬНАЯ СЕТЬ УПРАВЛЕНИЯ И ПЕРЕДАЧИ ДАННЫХ
Часть 2
Физический уровень
Tractors and machinery for agriculture and forestry. Serial control and communications data network. Part 2. Physical layer
ОКС 65.060.01
Дата введения 2022-01-01
Предисловие
1 ПОДГОТОВЛЕН Российской ассоциацией производителей специализированной техники и оборудования (Ассоциация "Росспецмаш") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 284 "Тракторы и машины сельскохозяйственные"
3 УТВЕРЖДЕН и ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 октября 2021 г. N 1205-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 11783-2:2019* "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 2. Физический уровень" (ISO 11783-2:2019 "Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 2: Physical layer", IDT).
Международный стандарт разработан Техническим комитетом ISO/ТС 23 "Тракторы и машины для сельского и лесного хозяйства", Подкомитетом SC 19 "Сельскохозяйственная электроника" Международной организации по стандартизации (ISO).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Части с 1 по 14 стандарта ИСО 11783 устанавливают систему коммуникаций сельскохозяйственного оборудования, основанную на протоколах ИСО 11898 [1]. Документы SAE J 1939, на части которых основан стандарт ИСО 11783, были разработаны для совместного использования на грузовых автомобилях и автобусах, а также для применения в строительстве и сельском хозяйстве. Были разработаны общие документы, позволяющие использовать после минимальных изменений в сельскохозяйственном и лесохозяйственном оборудовании электронные блоки, соответствующие техническим условиям SAE J 1939 для грузовых автомобилей и автобусов. Общая информация по всем частям ИСО 11783 приведена в ИСО 11783-1.
1 Область применения
Стандарты серии ИСО 11783 устанавливают технические требования к последовательным сетям передачи данных, относящимся к управлению и передаче сообщений в сельскохозяйственных и лесных тракторах, и в навесных, полунавесных, буксируемых или самодвижущихся орудиях. Цель настоящего стандарта заключается в стандартизации метода и формата передачи данных между датчиками, приводами, элементами управления, блоками для хранения или отображения информации, установленными на тракторе или орудиях, или являющихся их частью. Данный стандарт предназначен для обеспечения взаимодействия открытых систем (OSI) для электронных систем, используемых в сельскохозяйственном и лесном оборудовании.
Настоящий стандарт определяет и описывает физический уровень сети со скоростью передачи данных 250 Кбит/с из витого неэкранированного четырехжильного кабеля, а также альтернативные кабель и архитектуру, названную физическим уровнем на витой паре (TPPL), со скоростью передачи данных 250 Кбит/с из витого неэкранированного двухжильного кабеля, который полностью обратно совместим с машинами и устройствами на основе витого четырехжильного кабеля.
Примечание - Если не указано иное, требования распространяются и на четырехжильный кабель и на TPPL.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)].
ISO 1724, Road vehicles - Connectors for the electrical connection of towing and towed vehicles - 7-pole connector type 12 N (normal) for vehicles with 12 V nominal supply voltage [Дорожные транспортные средства-разъемы для электрического соединения буксирных и буксируемых транспортных средств. 7-полюсный разъем типа 12Н (нормальный) для транспортных средств с номинальным напряжением питания 12 В]
ISO 11783-1, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 1: General standard for mobile data communication (Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 1. Общий стандарт на мобильную передачу данных)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
ИСО и МЭК поддерживают терминологические базы данных для использования в стандартизации по следующим адресам:
- IEC Electropedia, которая доступна по адресу: http://www.electropedia.org/
- платформа ИСО для просмотра в режиме онлайн, которая доступна по адресу: https://www.iso.org/obp
3.1 ECU Типа I (ECU Type I): Электронный блок управления без встроенной оконечной схемы.
3.2 ECU Типа I МАЛОМОЩНЫЙ (ECU Type I WEAK): Электронный блок управления с маломощной оконечной схемой, центрально соединенной с ECU_GND через конденсатор и который может использоваться только для шлейфа.
Примечание 1 - См. 5.5.3.
3.3 ECU Типа II (ECU Туре II): Электронный блок управления с встроенной оконечной схемой, который может использоваться только на одном или каждом конце шины.
Примечание 1 - См. 5.4.3.2.
3.4 физический уровень из витой пары; TPPL (twisted pair physical layer): Физический уровень сети со скоростью передачи данных 250 Кбит/с из витого неэкранированного двухжильного кабеля, который полностью обратно совместим с машинами и устройствами на основе витого четырехжильного кабеля.
3.5 машина (machine): Сельскохозяйственные и лесные трактора и навесные, полунавесные, буксируемые или самодвижущиеся орудия.
3.6 физический уровень из четырехжильного кабеля; TQPL (twisted quad physical layer): Физический уровень сети со скоростью передачи данных 250 Кбит/с из витого неэкранированного четырехжильного кабеля.
4 Сокращения
IBBC - штепсельный разъем шины орудия;
IBBP - штепсельная вилка шины орудия.
5 Общие требования
5.1 Физический уровень сети
Физический уровень сети - это реализация электрического соединения нескольких электронных блоков управления (ECU) с сегментом шины сети. Общее количество подключенных ECU ограничено электрическими нагрузками на сегменте шины. В соответствии с электрическими параметрами, указанными в настоящем стандарте, допускается использование не более 30 ECU на каждом сегменте шины.
5.2 Физические проводники
Настоящий стандарт определяет два типа физических проводников.
a) TQPL: состоит из четырех проводников, два из которых, обозначенные CAN_H и CAN_L, проводят информационные сигналы. Названия выводов ECU, соответствующих этим проводникам, также обозначаются CAN_H и CAN_L. Третий и четвертый проводники, обозначенные TBC_PWR и TBC_RTN, обеспечивают питание оконечных схем (ТВС) на сегментах шины.
b) TPPL: физический проводник из витой пары, как описано в SAE J1939-15. Проводники, обозначенные CAN_H и CAN_L, проводят информационные сигналы. Названия выводов ECU, соответствующих этим проводникам, также обозначаются CAN_H и CAN_L.
5.3 Дифференциальное напряжение
5.4 Шина
5.4.1 Уровни
5.4.1.1 Общие положения
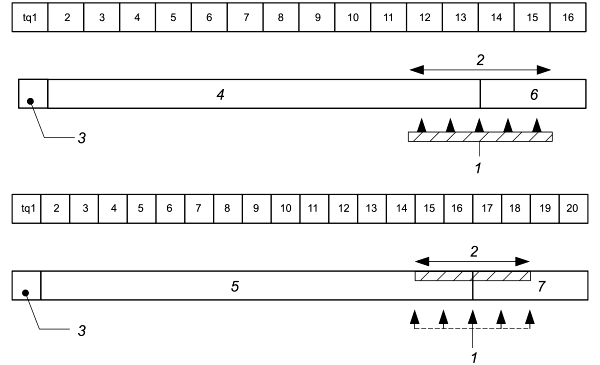
Сигнальные линии шины могут находиться на одном из двух уровней, а также в одном или другом из двух логических состояний, рецессивном или доминантном (см. рисунок 1). В рецессивном состоянии VCAN_H и VCAN_L фиксируются на уровне напряжения смещения. Vdiff примерно равен нулю на конце шины. Рецессивное состояние передается во время простоя шины, когда все драйверы узлов CAN выключены. Доминантное состояние передается, когда любой из драйверов узла CAN включен. Доминантное состояние представлено дифференциальным напряжением, превышающим минимальный порог, который обнаруживается узлами CAN приемных цепей. Доминантное состояние перезаписывает рецессивное состояние и передается, когда есть доминантный бит (см. также раздел 6).
 |
1 - рецессивное состояние; 2 - доминантное состояние
Рисунок 1 - Физическое битовое представление рецессивных и доминантных уровней или состояний
5.4.1.2 Арбитраж
Во время арбитража рецессивный и доминантный биты, направленные по сигнальным линиям шины в течение заданного битового времени двумя или более ECU, приводят к доминантному биту.
5.4.2 Диапазон напряжений
Диапазон напряжений шины определяется максимальным и минимальным допустимыми уровнями напряжения CAN_H и CAN_L, измеряемыми относительно ECU_GND каждого ECU, для которого гарантируется правильная работа, когда все ECU подключены к сигнальным линиям шины.
5.4.3 Оконечные схемы шины
5.4.3.1 Сегмент шины из четырехжильного кабеля
Сигнальные линии сегмента шины из четырехжильного кабеля на каждом конце оканчиваются оконечными схемами.
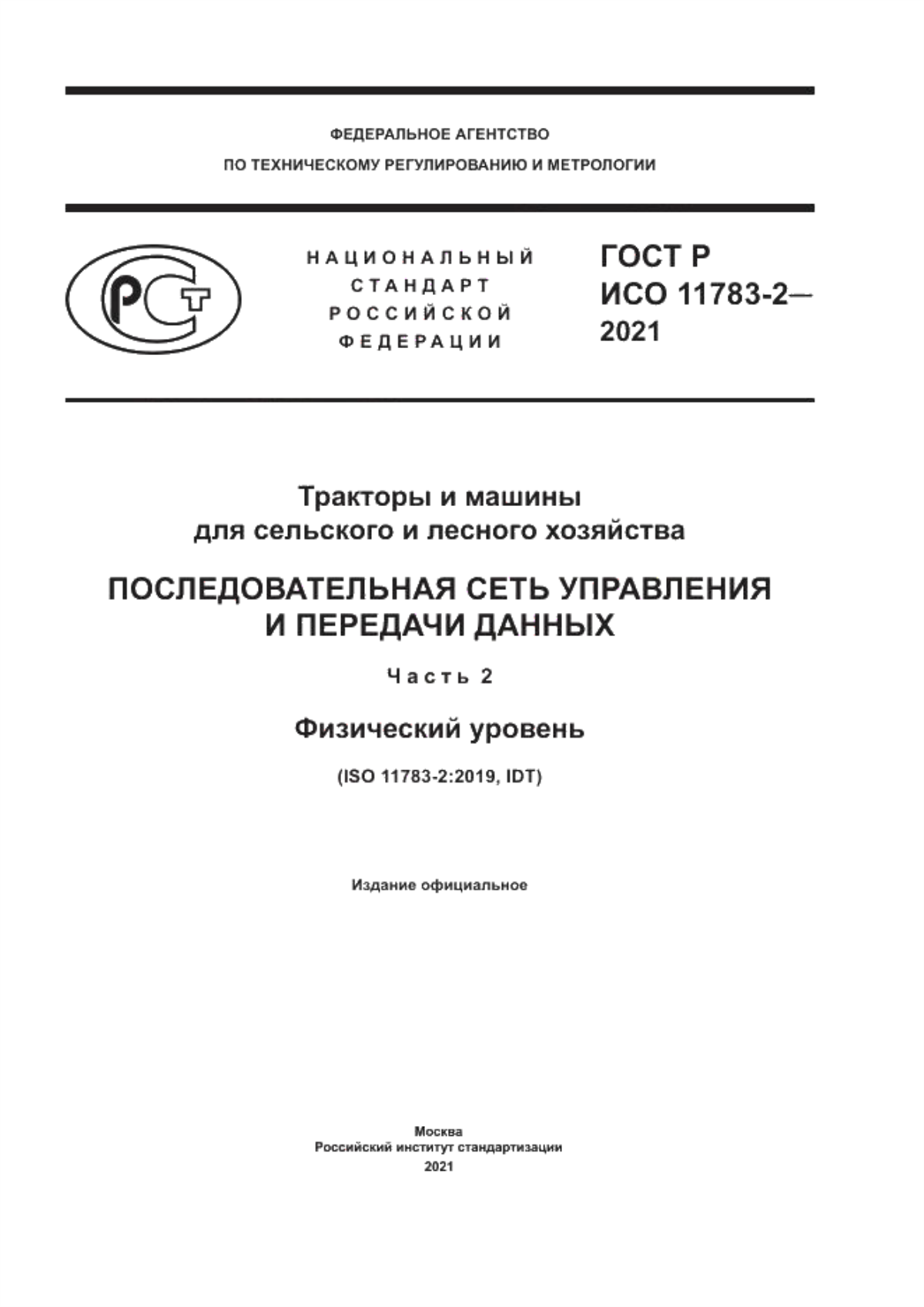
Когда драйвер узла CAN включен, индуцируется ток (I), который либо поглощается нагрузкой CAN_H, либо генерируется нагрузкой CAN_L. Оконечная схема (ТВС) должна располагаться снаружи ECU чтобы обеспечить нагрузку на шину и прекращение работы при отключении ECU (см. рисунок 2).
5.4.3.2 Сегмент физического уровня шины из витой пары
Если ECU Типа II используется для окончания сегмента шины, этот ECU должен содержать нагрузочный резистор (см. рисунок 5) и должен быть расположен только на одном или обоих концах шины по ISO 11783-2. ECU Типа II должны быть четко маркированы. ECU Типа II должны использоваться только на концах шины, даже если машина присоединена к другой машине через IBBC.
ECU Типа II должны получать питание только посредством ECU_PWR/ECU_GND.
См. рисунки 3 и 4.
 |
1 - в ECU N 1; 2 - ECU N n; 3 - витой четырехжилыный кабель; 4 - оконечная схема (ТВС); 5 - источник питания TBC_PWR и TBC_RTN
Рисунок 2 - Функциональная схема физического уровня
 |
1 - E
Рисунок 3 - Функциональная диаграмма TPPL
 |
1 - E
CU Типа I;
Рисунок 4 - Схема физического уровня (одна сторона) с ECU Типа II в качестве оконечной схемы
 |
1 - E
CU Типа II;
Рисунок 5 - Разделенная оконечная схема
5.5 Сопротивление и емкость
Внутреннее сопротивление и емкость ECU показаны на рисунке 6.
 |
Рисунок 6 - Внутреннее сопротивление и емкость ECU при рецессивном состоянии
Внутреннее сопротивление и емкость ECU показаны на рисунке 7.
 |
Рисунок 7 - Дифференциальное внутреннее сопротивление и емкость ECU при рецессивном состоянии
5.5.3 Маломощные оконечные схемы для шлейфов
Для повышения невосприимчивости и повышения стойкости к электромагнитным помехам, узлы TPPL, которые подключены к шине, могут быть дополнительно реализованы с помощью ECU Типа I МАЛОМОЩНЫЙ с разделенной оконечной схемой. При использовании ECU Типа I МАЛОМОЩНЫЙ, настоящий стандарт рекомендует использовать разделенную оконечную схему с сопротивлениями не менее 750 Ом + 750 Ом и с конденсатором 47 нФ, соединенным с ECU_GND. Общее число ECU Типа I МАЛОМОЩНЫЙ, используемых на одной машине, не должно превышать 3.
В соответствии с 7.6.3.7, если питание ECU подключено по PWR/GND, разделенная оконечная схема ECU Типа I МАЛОМОЩНЫЙ должна быть соединена с GND.
5.6 Время бита
Надежная сеть ИСО 11783 может быть построена с использованием ECU от разных поставщиков. ECU от разных поставщиков не могут должным образом принимать и интерпретировать действительные сообщения без временных ограничений, достигаемых конкретными требованиями к синхронизации для регистров битового времени в каждом контроллере протокола. Более того, существуют существенные различия между битовыми сегментами, используемыми производителями микросхем протоколов-контроллеров.
Объект подуровня физической сигнализации должен быть сконфигурирован для поддержки скорости передачи данных 250 кбит/с. Дополнительно необходимо настроить следующие параметры:
- метод единичной точки считывания по ИСО 11898-1;
- точку считывания на 80%±3% времени бита.
См. приложение А для получения дополнительной информации о синхронизации и именовании протокола, а также подробное описание времени бита.
5.7 Параметры переменного тока
В таблице 1 определены параметры переменного тока (АС) для ECU, отключенного от шины. Параметры синхронизации также применимы для ECU, подключенного к сегменту шины.
Таблица 1 - Параметры АС узла, отключенного от шины
Параметр | Обозначение | Мин. | Номинал. | Макс. | Разме- рность | Условия |
Время бита | 3,998 | 4,000 | 4,002 | мкс | 250 кбит/с | |
Время передачи | - | - | 500 | нс | Измеренное от 10% до 90% напряжения преобладающего состояния | |
Время внутренней задержки | 0,0 | - | 0,9 | мкс | ||
Внутренняя емкость | 0 | - | 200 | пФ | 250 кбит/с для CAN_H и CAN_L относительно заземления | |
Дифференциальная внутренняя емкость | 0 | - | 100 | пФ | ||
Отклонение общего режима | CMR | 40 | - | - | дБ | DC. До 50 кГц |
10 | - | - | дБ | 5 МГц, может линейно убывать между 50 кГц и 5 МГц | ||
Доступное время | 2,5 | - | - | мкс | При длине шины 40 м | |
Включая допуски запуска, температуры и старения. Согласование между управляющими напряжениями и импедансами (или токами) на линиях CAN_H и CAN_L одинаково важно при определении выбросов, поскольку представленные спектры определяются фактической формой волны. Значение гарантируется для дифференциального напряжения 1,0 B для перехода от рецессивного к доминантному, 0,5 B для перехода от доминантного к рецессивному. При битовой синхронизации, приведенной в этой таблице, номинально возможна задержка CAN-интерфейса в 500 нс (контроллер не входит в комплект) с запасом около 300 нс. Это позволяет более медленные наклоны передатчика и фильтрацию входного сигнала. Значения задержки указаны для шины орудия и на усмотрение производителя оригинального оборудования (OEM) для шины трактора. Минимальное время внутренней задержки может быть нулевым. Максимально допустимое значение определяется битовой синхронизацией и временем задержки шины. Общая временная задержка при арбитраже составляет (подъем1) + (подъемR) + (повторитель) + (подъемR) + (повторитель) + 2 (линия) + (узел2). Если для линии, повторителя и обратной петли в узле 2 задана задержка 0, а время перехода составляет> = 1/4 битового времени, времена перехода по-прежнему занимают все доступное битовое время. В дополнение к ограничениям внутренней емкости соединение шины также должно иметь как можно более низкую последовательную индуктивность. Минимальные значения и могут быть равны 0, в то время как максимально допустимые значения должны определяться битовой синхронизацией и параметрами топологии L и d (см. таблицу 15). Правильная работа гарантируется, если резонансные волны кабеля, если они возникают, не подавляют доминантный уровень дифференциального напряжения ниже 1 B и не увеличивают рецессивный уровень дифференциального напряжения выше 0,5 B на каждом отдельном ECU (см. таблицу 7 и таблицу 8). Доступное время определяется битовой синхронизацией IC протокола контроллера CAN. Например, как показано в приложении A, на этот раз в большинстве IC контроллеров CAN соответствует . Из-за плохой синхронизации можно потерять длину двух значений ширины скачка синхронизации (SJW), так что с одним случаем этой плохой синхронизации будет . Временной квант ( ) 250 нс с , , , дает 2,5 мкс. | ||||||
6 Спецификация сегмента шины
6.1 Сегмент шины из четырехжильного витого кабеля
Сегмент шины из четырехжильного витого кабеля должен на каждом конце заканчиваться ТВС (см. рисунок 2), который обеспечивает электрическое смещение и завершение синфазного режима, необходимые для подавления отражений.
Шина находится в рецессивном состоянии, если передатчики всех узлов на шине выключены, а среднее напряжение на шине генерируется ТВС на определенном сегменте шины (см. рисунок 2). Доминантный бит отправляется в сигнальные линии шины, если передатчик шины хотя бы одного из узлов включен. Это индуцирует ток через каждую сторону ТВС, в результате чего между линиями CAN_H и CAN_L создается дифференциальное напряжение.
Доминантный и рецессивный уровни шины передаются на вход компаратора в приемной схеме, чтобы быть обнаруженным как рецессивное и доминантное состояния.
6.2 Сегмент шины TPPL
Сегмент линейной шины TPPL должен заканчиваться на каждом конце оконечным сопротивлением (см. 5.4.3.2) для подавления отражений.
Шина находится в рецессивном состоянии, если передатчики шины всех узлов на шине выключены на определенном сегменте шины. Доминантный бит отправляется в сигнальные линии шины, если передатчик шины по крайней мере одного из узлов включен, так что между линиями CAN_H и CAN_L создается дифференциальное напряжение.
Доминантный и рецессивный уровни шины передаются на вход компаратора в приемной схеме, чтобы быть обнаруженным как рецессивное и доминантное состояния.
7 Электрические характеристики
7.1 Электрические данные
7.1.1 Общие положения
Параметры, указанные в таблице 1, таблице 2 и таблицах 7-10, должны соблюдаться во всем диапазоне рабочих температур каждого ECU. Эти параметры позволяют подключать максимум 30 ECU к сегменту шины длиной 40 м. ECU может быть отключен от шлейфа, но такой ECU по-прежнему учитывается относительно максимально допустимого количества ECU. Пределы, указанные в таблице 1, таблице 2 и таблицах 7-9, применяются к контактам CAN_H и CAN_L каждого ECU, при этом ECU отключен от сигнальных линий шины (см. раздел 8).
7.1.2 Абсолютные максимальные показатели
В таблице 2 указаны абсолютные максимальные значения постоянного напряжения, которые могут быть подключены к сигнальным линиям шины без повреждения цепей приемопередатчика. Хотя работа соединения в этих условиях не гарантируется, здесь нет ограничения по времени (работающие контроллеры CAN переходят в состояние пассивной ошибки по прошествии определенного периода времени).
Параметр | Обозначение | Мин. | Макс. | Размерность | |
Максимальное напряжение DC | -16,0 | 16,0 | В | ||
Условия | Номинальное напряжение 12 В | ||||
Примечание 1 - В этих условиях работа соединения не может быть гарантирована. Примечание 2 - Нет ограничения по времени (хотя работающие контроллеры CAN переходят в состояние пассивной ошибки после определенного периода). Отдельно (подключены только CAN_H или CAN_L) или общий режим. Не допускается повреждение схемы приемопередатчика. | |||||
Относительно вывода ECU_GND блока ECU (приемопередатчик должен работать с более широким диапазоном, если есть падение напряжения на внутренних линиях ECU).
7.1.3 Параметры DC
7.1.3.1 Диапазон напряжений питания
Таблица 3 - Пределы рабочих диапазонов напряжения питания
Параметр | Обозначение | Мин. | Макс. | Размерность | |
Рабочий диапазон | PWR | 10,0 | 16,0 | В | |
Номинальное напряжение 12 В | ECU_PWR | ||||
7.1.3.2 Минимальный ток источника питания
Минимальный ток, доступный на шине орудия ECU_PWR, должен составлять 15 А.
Минимальный допустимый ток шины орудия PWR должен составлять 50 А.
7.1.3.3 Требования к напряжению постоянного тока, подаваемому трактором через IBBC
Электроэнергия трактора подается от источника питания 12 В и генератора переменного тока на различные электрические нагрузки трактора и агрегата. В то время как напряжение в системе регулируется на клеммах генератора, электрические нагрузки, подключенные через длинные электрические провода, будут испытывать падение напряжения из-за сопротивлений подводящего и обратного проводов. Если это падение напряжения становится чрезмерным, электрическая нагрузка может работать неправильно. Чтобы трактор мог надлежащим образом подавать электроэнергию на орудие, к клеммам электропитания IBBC/TPPL-BC применяются следующие требования к напряжению.
Минимальный допустимый ток, доступный от цепи ECU_PWR/ECU_GND шины орудия трактора, должен составлять 15 А при условиях, указанных в таблице 4.
Таблица 4 -Пределы ECU_PWR через IBBC/TPPL-BC
Параметр | Мин. | Макс. | Размерность |
V(ECU_PWR) - V(ECU_GND) | 10,5 | 16,0 | В |
Условия измерения: - измерено на всех терминалах трактора IBBC/TPPL-BC; - электрическая нагрузка 15 А постоянного тока; - двигатель в нормальном рабочем диапазоне оборотов, мин (как определено производителем); - включены электрические нагрузки трактора (фары, вентиляторы и т.д.). | |||
Минимальный допустимый ток, доступный от цепи PWR/GND шины орудия на тракторе, должен составлять 50 А при условиях, указанных в таблице 5.
Таблица 5 -Пределы PWR через IBBC/TPPL-BC
Параметр | Мин. | Макс. | Размерность |
V(PWR) - V(GND) | 10,5 | 16,0 | В |
Условия измерения: - измерено на всех терминалах трактора IBBC/TPPL-BC; - электрическая нагрузка 50 А постоянного тока; - двигатель в нормальном рабочем диапазоне оборотов, мин (как определено производителем); - включены электрические нагрузки трактора (фары, вентиляторы и т.д.). | |||
Чтобы продлить срок службы компонентов и предотвратить повреждение, максимальный постоянный одновременный суммарный ток, подаваемый от одного IBBC через цепи ECU_PWR/ECU_GND и PWR/GND, должен составлять ток 55 А.
7.1.3.4 Требования к падению постоянного напряжения на орудиях
Электроэнергия на орудия подается от цепей PWR и ECU_PWR через IBBC.
Орудие может иметь заднюю розетку IBBC для последовательного подключения дополнительных устройств, которые действуют как электрические нагрузки.
В случае последовательного подключения, если напряжение падает из-за слишком высокого сопротивления подводящего и обратного проводов на орудии, следующее орудие может получать недостаточное рабочее напряжение для правильной работы. Чтобы избежать такой ситуации и гарантировать, что навесное орудие может адекватно подавать электроэнергию на следующее орудие, максимально допустимое падение напряжения на навесном орудии должно соответствовать таблице 6.
Максимальный ток потребления орудия должен быть указан в руководстве оператора.
Таблица 6 - Максимально допустимое падение напряжения на орудии
Параметр | Мин. | Макс. | Размерность |
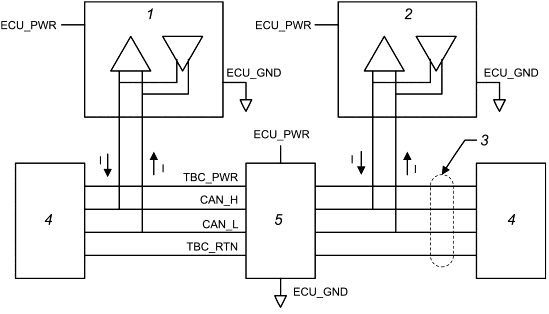
Падение напряжения в цепи орудия ECU_PWR/ECU_GND | - | 1,5 | В |
Падение напряжения в цепи орудия PWR/ GND | - | 1,5 | В |
Подается 15 А на заднее IBBC орудия. Подается 50 А на заднее IBBC орудия. Условия измерений (см. рисунок 8): - измерено между вилкой орудия и задней IBBC орудия; - любая нагрузка испытываемого орудия должна быть отключена; -1,5 В - общее падение напряжения в обеих цепях (питания и возврата). | |||
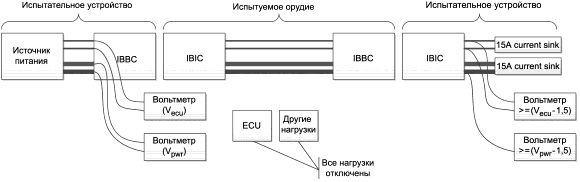 |
Рисунок 8 - Измерение падения напряжения
7.1.3.5 Отключенный от шины ECU
Таблица 7 и таблица 8 определяют, соответственно, параметры постоянного тока для рецессивного и доминантного состояний ECU, отключенного от шины.
Таблица 7 - Параметры DC рецессивного состояния отключенного от шины ECU
Параметр | Обозначение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Напряжение шины | , | 2,0 | 2,5 | 3,0 | В | |
Дифференциальное выходное напряжение | -1200 | - | 50 | мВ | ||
Дифференциальное внутреннее сопротивление | 2 | - | 100 | кОм | ||
Внутреннее сопротивление | 5 | - | 50 | кОм | ||
Соответствие внутреннего сопротивления | - | -5 | - | 5 | % | |
Входное дифференциальное напряжение, определяемое как рецессивное | -1,0 | - | 0,5 | В | ||
Питание ECU включено. Эквивалентное сопротивление Тевенина входной цепи появляется последовательно от клемм CAN_H и CAN_L до источника входного смещения. Это входное смещение требуется для обеспечения известного состояния сетевых сигналов ECU, отключенного от сегмента шины. Прием должен быть обеспечен в пределах диапазона напряжения, определенного в таблицах 9 и 10. На физическом уровне используются методы подавления полей. Согласование между управляющими напряжениями и импедансами (или токами) на линиях CAN_H и CAN_L одинаково важно при определении излучения, поскольку представленные спектры определяются фактической формой волны. Несмотря на то, что -1,0 V возможно только в условиях отказа, это состояние интерпретируется как рецессивное для соответствия требованиям отказов. Минимальное значение включенного и выключенного ECU по 5.5.1 и 5.5.2. Только для ECU Типа I. | ||||||
Таблица 8 - Параметры DC доминантного состояния отключенного от шины ECU
Параметр | Обозначение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Напряжение шины | 3,0 | 3,5 | 5,0 | В | ||
0,0 | 1,5 | 2,0 | ||||
Дифференциальное напряжение | 1,5 | 2,0 | 3,0 | |||
Дифференциальное напряжение, определяемое как доминантное | 1,0 | - | 5,0 | |||
Нагрузка 60 Ом подключена между CAN_H и CAN_L. Прием должен быть обеспечен в пределах диапазона напряжения, определенного в таблице 9 или таблице 10. ECU Типа I (нормальный или маломощный) имеет сопротивление 60 Ом между CAN_H, CAN_L находящимся вне блока ECU. ECU Типа II имеет сопротивление 120 Ом между CAN_H, CAN_L, находящимся вне блока ECU. | ||||||
7.1.3.6 Подключенный к шине ECU
Таблица 9 и таблица 10 определяют, соответственно, параметры постоянного тока для рецессивного и доминантного состояний ECU, подключенного к сегменту шины и другим ECU.
Таблица 9 - Параметры DC (напряжение шины) всех подключенных к шине ECU в рецессивном состоянии, без учета отказов
Параметр | Обозначение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Напряжение шины | , | 0,1 | 2,5 | 4,5 | В | Измеряют относительно заземления каждого ECU |
Дифференциальное выходное напряжение | -400 | 0 | 12 | мВ | Измеряют каждый ECU подключенный к сигнальным линиям шины | |
Максимальное рецессивное значение 3,0 В (см. таблицу 7) плюс максимальное смещение заземления 2,0 В. Дифференциальное напряжение на шине определяется поведением выходных сигналов всех ECU в рецессивном состоянии. Следовательно, приблизительно равен нулю (см. таблицу 7). Несмотря на то, что -1,0 V возможно только в условиях отказа, это состояние интерпретируется как рецессивное для соответствия требованиям отказов. | ||||||
Таблица 10 - Параметры DC (напряжение шины) всех подключенных к шине ECU в доминантном состоянии, без отказов
Параметр | Обозначе- ние | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Напряжение шины | - | 3,5 | 7,0 | В | Измеряют относительно | |
-2,0 | 1,5 | - | заземления каждого ECU | |||
Дифференциальное напряжение шины | 1,2 | 2,0 | 3,0 | В | Измеряют каждый ECU подключенный к сигнальным линиям шины | |
5,0 | Во время арбитража | |||||
Минимальное значение определяется как минимальное значение плюс минимальное значение . Максимальное значение определяется как максимальное значение минус значение . Нагрузка на сигнальные линии шины при добавлении ECU к данному сегменту шины любой сети обусловлена и каждого из ECU. Следовательно, может уменьшиться. Минимальное значение обычно ограничивает количество ECU, разрешенных на шине. Максимальное значение возникает во время арбитража, когда несколько ECU управляют сигнальными линиями шины. Это максимальное значение влияет на несимметричный режим работы и не должно превышать 3 В. | ||||||
7.1.4 Напряжения шины (рабочие)
Параметры напряжения на шине, указанные в таблице 10, применяются, когда все ECU (от 2 до 30) подключены к правильно оконечному сегменту шины (см. 5.4.3). Максимально допустимое смещение заземления между ECU или ECU и ТВС на шине составляет 2 В. Экстремальные значения напряжения, связанные с этим смещением, могут возникать как в доминантном, так и в рецессивном состоянии.
7.1.5 Электростатический разряд (ESD)
Сигналы CAN_H и CAN_L должны быть испытаны на электростатический разряд при отключении от шины CAN в соответствии с ИСО 10605 и с использованием максимального испытательного уровня 15 кВ как для упаковки компонентов, так и для методов тестирования (без питания) и устойчивости компонентов (с питанием).
Для проверки упаковки и обращения с компонентами необходимо подать не менее трех импульсов каждой полярности и напряжения на контакты CAN_H и CAN_L (отключенные от сигнальных линий шины CAN) обесточенного ECU с использованием разрядной сети 150 пФ/2 кОм в следующей последовательности: контакт ±4 кВ, контакт ±8 кВ и контакт ±15 кВ.
Для проверки невосприимчивости компонентов минимум три импульса каждой полярности и напряжения должны быть приложены к контактам CAN_H и CAN_L (отключенным от сигнальных линий шины CAN) ECU с питанием на контактах диагностического разъема. Длина кабеля между прибором и диагностическим разъемом должна составлять от 1,5 м до 2,5 м.
В качестве разрядной сети следует использовать 150 пФ/330 Ом в следующей последовательности: контакт ±4 кВ, контакт ±8 кВ и контакт ±15 кВ.
После испытания на электростатический разряд ECU должен быть протестирован, чтобы подтвердить, что он по-прежнему соответствует параметрам постоянного и переменного тока по таблицам 1, 7 и 8 для узла, отключенного от шины.
Примечание - Обычно разряды прикладываются к проводящим частям (например, контактам), воздушные разряды применяются к непроводящим частям (например, к изоляции кабеля). Воздушные разряды могут применяться к проводящим частям в соответствии с планом испытаний, но они менее воспроизводимы и их трудно связать с отдельными контактами, особенно если установлен корпус разъема.
7.2 Параметры проводников
7.2.1 Неэкранированный четырехжильный кабель
Параметры витого четырехжильного кабеля (см. рисунок 9) должны соответствовать указанным в таблице 11.
Таблица 11 - Физические параметры проводов четырехжильного витого кабеля
Параметр | Обозна- чение | Мин. | Номинал. | Макс. | Размерность | Условия |
Сопротивление | 70 | 75 | 80 | м | Измеряют при 1 МГц между любой сигнальной линией и заземлением при заземленных TBC_PWR и TBC_RTN | |
Удельное сопротивление | 0 | 25 | 50 | мОм/м | Измеряют при 20°С | |
Удельная задержка линии | - | 5,0 | - | нс/м | ||
Удельная емкость | 0 | 40 | 75 | пФ/м | Между CAN_H и CAN_L | |
0 | 70 | 110 | пФ/м | Между соответствующими проводниками | ||
Сечение провода | - | 0,5 | - | мм | Сечение должно быть сформировано из 16 или более жил размером 32AWG из луженой или чистой меди | |
Диаметр изоляции провода | 2,0 | 2,11 | 3,05 | мм | Выбор правильного уплотнения типа N, T или E для вилки штепсельного разъема шины (см. рисунок 10) | |
Закрутка проводов | - | 48 | 50 | 52 | мм/оборот | Левосторонняя закрутка TBC PWR, CAN_H, TBC_RTN, CAN_L |
Толщина оплетки кабеля | - | 0,5 | - | мм | - | |
Диаметр кабеля | 6,0 | 6,2 | 8,5 | мм | - | |
Температурный диапазон | T | -40 | - | +85 | °С | Продолжительная работа без деградации |
Дифференциальное напряжение на сегменте шины, воспринимаемое принимающим ECU, зависит от сопротивления линии между ним и передающим ECU. Следовательно, общее сопротивление сигнальных проводников ограничено параметрами уровня шины каждого ECU. Минимальное время задержки между двумя точками сегмента шины может быть равно нулю. Максимальное значение определяется битовым временем и временем задержки передающей и приемной схем. Более высокий температурный диапазон может потребоваться в областях, где температура окружающей среды превышает +85°С. | ||||||
В таблице 12 приведены рекомендуемые цвета изоляции проводов кабеля. Подробное описание цвета проводов должно быть включено в инструкцию производителя.
Таблица 12 - Рекомендуемые цвета изоляции проводников
Цвет изоляции проводников | Красный | TBC_PWR |
Желтый | CAN_H | |
Черный | TBC_RTN | |
Зеленый | CAN_L |
7.2.2 Неэкранированная витая пара
Параметры неэкранированной витой пары должны соответствовать указанным в таблице 13.
Таблица 13 - Физические параметры проводников витой пары
Параметр | Обозна- чение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Сопротивление | Z | 108 | 120 | 132 | м | Образец длиной три метра измеряют при 1 МГц между двумя сигнальными линиями |
Удельное сопротивление | - | 25 | 50 | мОм/м | Измеряют при 20°С | |
Удельная задержка линии | - | 5,0 | - | нс/м | ||
Удельная емкость | - | 40 | 75 | пФ/м | Между CAN_H и CAN_L | |
Сечение провода | - | 0,5 | - | мм | Сечение должно быть сформировано из 7 или более жил из луженой или чистой меди. Конструкция проводника зависит от варианта использования | |
Диаметр изоляции провода | 2,0 | 2,11 | 3,05 | мм | Зависит от условий окружающей среды, используемых разъемов и их контактного уплотнения. Инженеры-проектировщики должны обеспечить совместимость кабелей/ проводов, разъемов и контактов | |
Закрутка проводов | - | 24 | - | 52 | мм/оборот | |
Толщина оплетки кабеля | - | - | - | мм | ||
Температурный диапазон | T | -40 | - | +85 | °С | |
Дифференциальное напряжение на сегменте шины, воспринимаемое принимающим ECU, зависит от сопротивления линии между ним и передающим ECU. Следовательно, общее сопротивление сигнальных проводников ограничено параметрами уровня шины каждого ECU. Минимальное время задержки между двумя точками сегмента шины может быть равно нулю. Максимальное значение определяется битовым временем и временем задержки передающей и приемной схем. Более высокий температурный диапазон может потребоваться в областях, где температура окружающей среды превышает +85°С. Оплетка не требуется, если характеристики канала связи сохраняются в течение всего срока службы продукта. | ||||||
 |
Рисунок 9 - Поперечное сечение кабеля
Линия шины состоит из проводов CAN_H и CAN_L. Рекомендуется, чтобы оболочка провода CAN_H была желтой, а оболочка провода CAN_L была зеленой (см. рисунок 9 и таблицу 14).
Таблица 14 - Рекомендуемые цвета изоляции проводов
Цвет изоляции проводников | Желтый | CAN_H |
Зеленый | CAN_L |
7.3 Топология физического уровня из четырехжильного витого кабеля
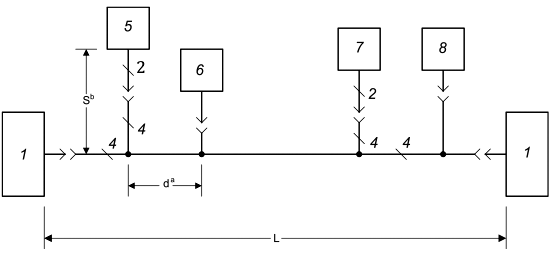
Чтобы избежать отражений внутри кабеля, топология разводки сегмента шины должна иметь, по возможности, линейную структуру. На практике необходимо подключать короткие отрезки к основному магистральному кабелю, как показано на рисунке 9. Чтобы минимизировать стоячие волны, узлы не должны располагаться на одинаковом расстоянии в сегменте шины, а длины отрезков не должны быть одинаковой длины. Размерные параметры этой топологии, показанные на рисунке 10, должны соответствовать таблице 17.
 |
_______________
Рисунок 10 - Топология проводов сегмента сети
Таблица 15 - Размеры топологии
Параметр | Обозначение | Мин. | Макс. | Размерность | Условия |
Длина шины | L | 0 | 40 | m | Без учета шлейфов |
Длина шлейфа | S | 0 | 1 | m | - |
Расстояние между узлами | d | 0,1 | 40 | m | - |
7.3.1 Соединение ECU с TBC_PWR и TBC_RTN
Чтобы определить состояние сети, каждый ECU на шине может предоставить контакт для TBC_PWR и TBC_RTN. Пределы нагрузки должны соответствовать приведенным в таблице 16.
Таблица 16 - Нагрузка от ECU на TBC_PWR и TBC_RTN
Параметр | Обозначение | Мин. | Макс. | Размерность | Условия |
DC сопротивление | RTBC_PWR | 30 | - | кОм | Измеряют между TBC_PWR и любым другим сигналом в ECU |
RTBC_RTN | 30 | - | кОм | Измеряют между TBC_RTN и любым другим сигналом в ECU | |
Емкость | CTBC_PWR | - | 200 | нФ | Измеряют при 1 МГц между TBC_PWR и любым другим сигналом в ECU |
CTBC_RTN | - | 200 | нФ | Измеряют при 1 МГц между TBC_RTN и любым другим сигналом в ECU |
7.3.2 Питание для TBC_PWR и TBC_RTN
TBC_PWR и TBC_RTN для данного сегмента шины должны предоставляться только в одной точке. Эта единственная точка подключения должна быть выбрана в соответствии с требованиями таблицы 17. Фильтрация и регулирование могут быть предусмотрены в модуле, обеспечивающем это соединение (см. приложение B).
7.4 Топология физического уровня из витой пары
7.4.1 Общие положения
Основная топология такая же, как у TQPL, за следующими исключениями, чтобы предоставить больше возможностей разработчикам. ECU подключаются к шине с помощью:
- простого шлейфа;
- составного шлейфа;
- множественного сращивания.
Минимальное расстояние между двумя шлейфами/сращиваниями должно быть 50 см.
7.4.2 Простой шлейф
Простой шлейф предназначен для подключения к шине одного ECU. Максимально допустимая длина 3,0 м.
Простой шлейф, расположенный рядом с оконечной схемой, должен иметь длину на 50 см меньше, чем расстояние от ответвления до оконечной схемы.
 |
Рисунок 11 - Простой шлейф
 |
T - оконечная схема; L1 - длина шлейфа; L2 - длина от шлейфа до оконечной схемы
Рисунок 12 - Простой шлейф возле оконечной схемы
7.4.3 Составной шлейф
Составной шлейф получается из обычного шлейфа, срощенного на конце. Максимальное количество стыков - три, и каждое должно иметь разную длину. Максимальная длина основного шлейфа 1,5 м. Минимальная длина срощенного шлейфа составляет 0,2 м, а максимальная - 0,5 м.
Составной шлейф, расположенный рядом с оконечной схемой, должен иметь самую длинную ветвь по крайней мере на 50 см меньше, чем расстояние от шлейфа до оконечной схемы.
На машине должен быть только один составной шлейф.
 |
Рисунок 13 - Составной шлейф
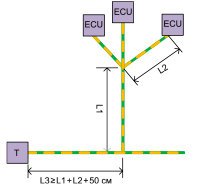 |
T - оконечная схема; L1 - длина основного шлейфа; L2 - длина самой длинной ветви шлейфа; L3 - длина от шлейфа до оконечной схемы
Рисунок 14 - Составной шлейф возле оконечной схемы
7.4.4 Множественное сращивание
Множественное сращивание - это соединение более чем одного шлейфа с одной точкой соединения на шине. Максимальное количество шлейфов от одного стыка - три. Шлейфы должны иметь разную длину от минимального значения 0,5 м до 1,5 м.
Сращивание, расположенное рядом с оконечной схемой, должно иметь самую большую длину шлейфа по крайней мере на 50 см меньше, чем расстояние от точки соединения до оконечной схемы
На машине может быть только одно множественное сращивание.
 |
Рисунок 15 - Множественное сращивание
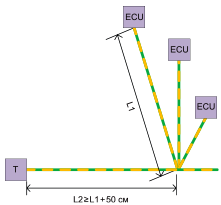 |
Т - оконечная схема; L1 - длина самого длинного шлейфа; L2 - длина от точки соединения до оконечной схемы
Рисунок 16 - Множественное сращивание возле оконечной схемы
7.5 Параметры ТВС
Оконечная схема для физического уровня из четырехжильного кабеля соединяет все четыре проводника, обеспечивая не только передачу сигналов CAN_H и CAN_L, но также резистивное подавление сигнала для соответствующих проводников. На рисунке 17 показана эквивалентная схема Тевенина, требуемая ТВС, которая должна быть по одной для каждого конца каждого сегмента шины в сети (см. приложение В). ТВС должен соответствовать параметрам, указанным в таблице 17.
Таблица 17 - Параметры оконечной схемы (ТВС)
Параметр | Обозначение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Напряжение смещения CAN_H | 2,25 | 2,5 | 2,75 | В | должен обеспечивать ток 5 мА и поглощение 90 мА к заземлению | |
Напряжение смещения CAN_L | 2,25 | 2,5 | 2,75 | В | должен обеспечивать ток 90 мА и поглощение 500 мкА | |
Отслеживание смещения CAN | -0,1 | - | 0,1 | В | - | |
CAN_H сопротивление оконечной схемы | 70 | 75 | 80 | Ом | Эквивалент Тевенина для ТВС | |
CAN_L сопротивление оконечной схемы | 70 | 75 | 80 | Ом | Эквивалент Тевенина для ТВС | |
Отслеживание сопротивления | 0,98 | - | 1,02 | - | - | |
Параллельная емкость | - | - | 15 | пФ | CAN_H и CAN_L к заземлению | |
Линейная индуктивность | - | - | 0,1 | мкГн | - | |
Диапазон напряжений питания для систем 12В | TBC_PWR | 8 | - | 16 | V | 25 мВ межпиковая пульсация в диапазоне от 20 кГц до 2 МГц |
Отказоустойчивость сигнальных линий шины | Замыкание на питание | - | - | - | - | Прохождение тока |
Отказоустойчивость сигнальных линий шины | Замыкание на заземление | - | - | - | - | Прохождение тока |
Отслеживание сопротивления определяется как . | ||||||
Таблица 18 - Параметры пассивной оконечной схемы TPPL
Параметр | Обозначение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Одиночный резистор | ||||||
сопротивление оконечной схемы | 114 | 120 | 126 | Ом | Номинальная мощность не менее 250 мВт | |
Разделенные резисторы | ||||||
CAN_H сопротивление оконечной схемы | 58,8 | 60 | 61,2 | Ом | Номинальная мощность не менее 125 мВт | |
CAN_L сопротивление оконечной схемы | 58,8 | 60 | 61,2 | Ом | Номинальная мощность не менее 125 мВт | |
Разделительный конденсатор | 10 | 47 | 200 | нФ | ||
Линейная индуктивность | - | - | 0,02 | мкГн | ||
Допускается только в ECU Типа II . | ||||||
 |
Рисунок 17 - Эквивалентная оконечная схема (ТВС)
7.6 Разъемы
7.6.1 Общие положения
Для сегмента шины орудия применяют три типа разъемов (см. рисунок 18):
- штепсельный разъем шины орудия (см. 7.6.3);
- внутрикабинный разъем (см. 7.6.4);
- диагностический разъем (см. 7.6.5).
Дополнительно может быть использован разъем удлинителя шины (см. 7.6.2).
Примечание - Для получения дополнительной информации о различных сегментах шины и их соединениях см. рисунок В.1.
7.6.1.1 Электрические характеристики
Разъемы и соответствующие клеммы, используемые для соединения линий шины в сегменте шины, должны соответствовать электрическим параметрам, указанным в таблице 19.
7.6.1.2 Механические характеристики
Разъемы должны иметь устройства фиксации, ориентации и удержания, отвечающие требованиям конкретного применения. Они также должны включать защиту окружающей среды, соответствующую применению.
 |
1 - трактор; 2 - орудие; 3 - штепсельный разъем шины; 4 - разъем удлинителя шины; 5 - диагностический разъем; 6 - оконечная схема; 7 - внутрикабинный разъем
Рисунок 18 - Пример архитектуры физического уровня, показывающий четыре типа разъемов
Таблица 19 - Электрические параметры разъемов шины
Параметр | Обозна- чение | Мин. | Номинал. | Макс. | Размер- ность | Условия |
Диэлектрическая утечка при выдерживаемом напряжении | - | - | - | 2 | мА | При 1500 В; между любыми контактами и между контактами и корпусом разъема |
Сопротивление контактов | - | - | 20 | мОм | Измеряют при 100 мА | |
Ток | I | 0 | 32 | 70 | мА | - |
Пиковый ток | 2,5 | - | - | А | Ограничение по времени: 2 с | |
Рабочее напряжение | V | - | 2,5 | 40 | В | - |
Импенданс | 60 | 120 | 175 | Ом | Максимальная длина разъема не должна быть более чем в два раза больше длины межфазного разъема. Измеряют между CAN_H и CAN_L разъема | |
Параллельная емкость | - | - | 35 | пФ | Между CAN_H или CAN_L и всеми остальными контактами и корпусом разъема | |
Угловая частота | f | 10 | - | - | МГц | 3 дБ с сигналом 1 В р-р |
7.6.2 Разъем удлинителя шины
7.6.2.1 Общие положения
Пара сопряженных соединителей может быть предусмотрена для удлинения сигнальных линий шины орудия в тракторе, если это необходимо в полевых условиях для дополнительных устройств, таких как виртуальные терминалы.
7.6.2.2 Размеры
Розетка удлинительного разъема шины должна иметь размеры, показанные на рисунке 19, а вилка удлинительного разъема шины должна совпадать с розеткой.
 |
1 - контакт с полным радиусом
_______________
Рисунок 19 - Требования к размерам разъема удлинителя шины
7.6.2.3 Назначение контактов
Четыре контакта разъема удлинителя шины должны иметь следующее назначение:
- контакт 1: TBC_PWR (зарезервировано для TPPL);
- контакт 2: CAN_H;
- контакт 3: TBC_RTN (зарезервировано для TPPL);
- контакт 4: CAN_L.
7.6.3 Штепсельный разъем шины орудия
7.6.3.1 Общие положения
Розетка должна быть размещена на задней части трактора рядом с существующим разъемом освещения буксируемого оборудования и ориентирована в том же направлении, что и существующий разъем освещения буксируемого оборудования, в соответствии с ИСО 1724. Розетка должна иметь пылезащитный колпачок, закрывающий разъем, когда буксируемое оборудование не подключено.
Дополнительную розетку можно установить на передней части трактора рядом с передними гидравлическими выходами, если установлено переднее навесное оборудование. Этот разъем должен соответствовать спецификациям в приложении В.
Вилку, которая подходит к вышеуказанной розетке, необходимо установить на сцепное устройство орудия. Эта вилка должна иметь достаточную длину кабеля для подключения к розетке. Если к агрегату может быть присоединено дополнительное оборудование, в точке крепления должна быть размещена розетка, указанная в 7.6.3.4. Этот разъем должен иметь пылезащитный колпачок, который закрывает его, когда буксируемое оборудование не подключено.
Питание на контакте 5 розетки отключает оконечную схему шины орудия. Контакт 5 вилки замкнут с контактом 4, ECU_PWR.
7.6.3.2 Оконечная схема для TQPL IBBC
ТВС должна располагаться на каждой штепсельной розетке шины орудия. Эта активная цепь должна быть на стороне розетки шины. Каждый раз, когда вилку штепсельного разъема шины орудия подключают к розетке, ТВС на стороне розетки должен быть отключен от CAN_H и CAN_L.
Нагрузка отключенного ТВС на TBC_PWR и TBC_RTN должна быть менее 20 мА.
7.6.3.3 Оконечная схема для IBBC физического уровня из витой пары
Оконечные сопротивления RL = 120 Ом должны быть расположены в каждой штепсельной розетке шины орудия TPPL. Каждый раз, когда вилку штепсельного разъема шины орудия подключают к розетке оконечное сопротивление должно быть отключено или от CAN_H или от CAN_L.
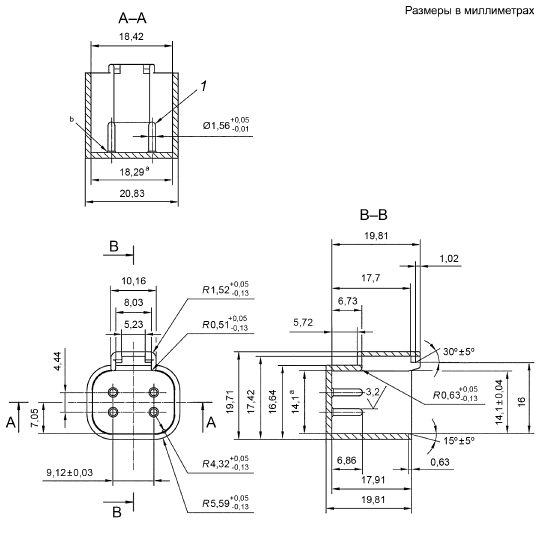
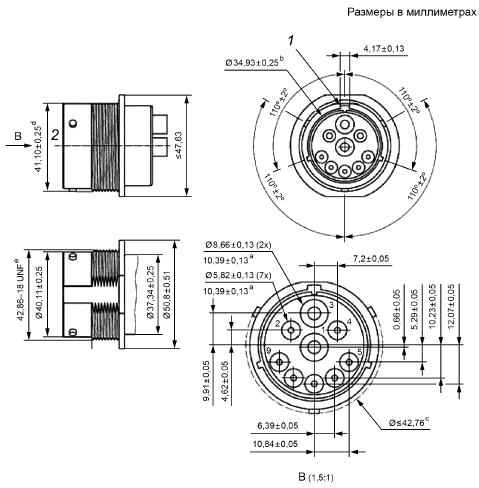
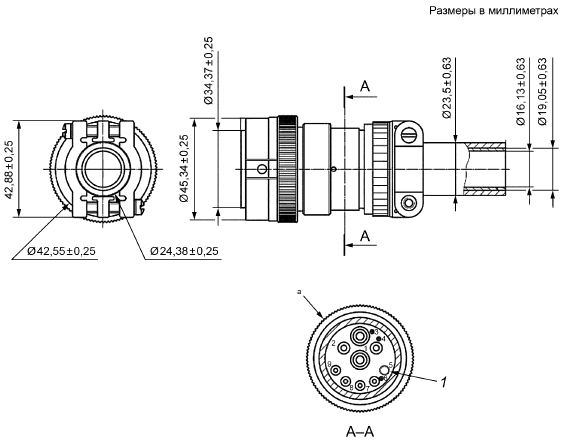
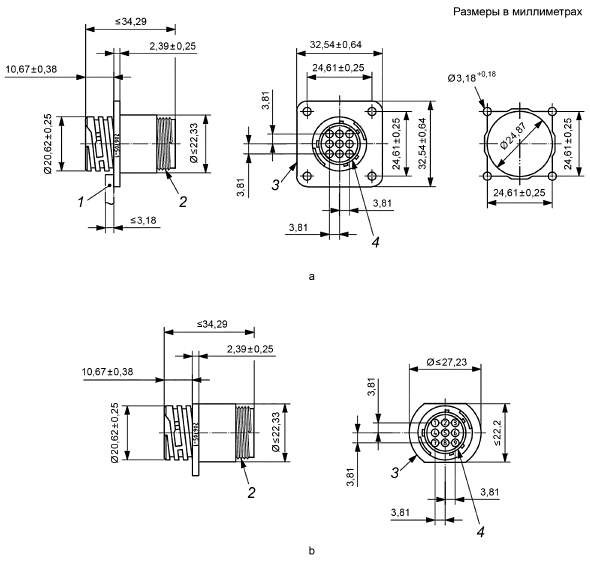
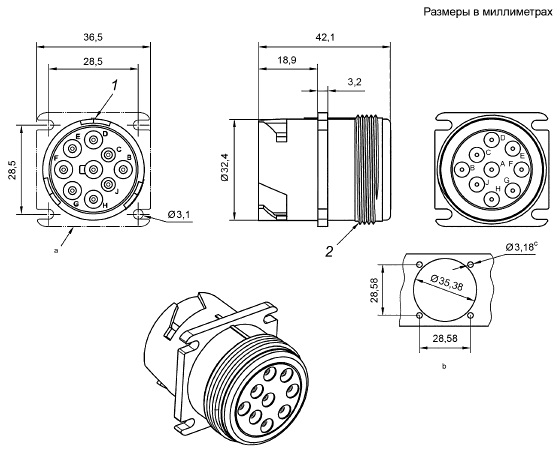
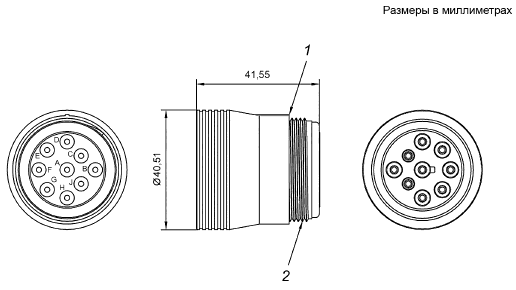
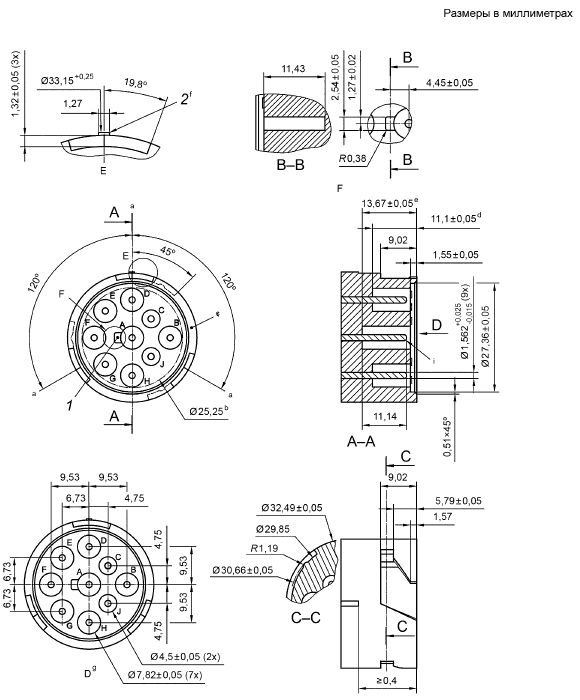
7.6.3.4 Размеры
Штепсельная розетка шины орудия должна соответствовать размерам, показанным на рисунке 20. Эта розетка трактора или орудия должна иметь штыревые контакты.
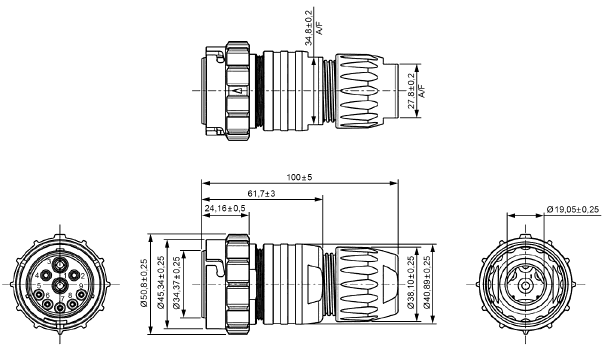
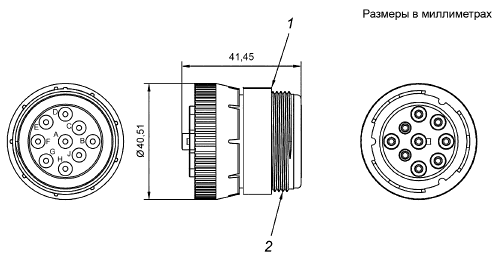
Ответная вилка должна иметь размеры, указанные на рисунке 21. Эта вилка, устанавливаемая на орудии, должна иметь гнездовые контакты для подключения к розетке.
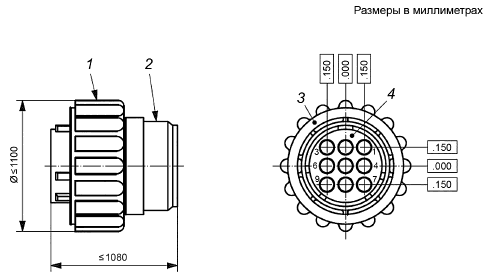
Штепсельный разъем шины орудия и автоматическое переключение ТВС должны соответствовать установочным размерам, указанным на рисунке 22.
7.6.3.5 Назначение контактов
Штепсельный разъем шины орудия должен иметь расположение контактов, показанное в таблице 20 (также приведены примеры цветов проводов). Однако штепсельная розетка шины орудия, которая включает в себя ТВС, может также иметь разъем с назначением контактов, указанным в таблице В.2. Разъем с назначением контактов, показанным в таблице В.1, может использоваться для подключения питания ECU к ТВС в розетке.
Примечание - Электропитание штепсельного разъема шины орудия или штепсельного разъема TPPL контролируется ECU трактора.
7.6.3.6 Изоляция заземления
Цепи заземления для GND и ECU_GND должны быть подключены только в одном месте, которое рекомендуется к отрицательной клемме источника питания трактора (питание 12 В). Во избежание образования контуров заземления запрещается выполнять какие-либо другие соединения между GND и ECU_GND на тракторе или любом подключенном оборудовании. Измерение сопротивления между контактом 1 (GND) и контактом 2 (ECU_GND) штепсельного разъема шины орудия должно быть больше или равно 1 кОм со всеми ECU, подключенными к орудию. Рекомендуется, чтобы функции ECU, включая связь CAN, получали питание от цепи ECU_PWR/ECU_GND. Однако ECU на орудии может использовать только цепь PWR/GND без связи со схемой ECU_PWR/ECU_GND.
Для модулей TQPL IBBC, ECU_PWR и ECU_GND должны подключаться только к ТВС, входящему в состав штепсельной розетки шины орудия. Никакие соединения между ECU_PWR и TBC_PWR или между ECU_GND и TBC_RTN не должны выполняться на других ТВС, подключенных к шине ИСО 11783 на тракторе или любом подключенном орудии. Никакие соединения между PWR и TBC_PWR или между GND и TBC_RTN не должны выполняться ни на каких ТВС, подключенных к сети. Измеренное сопротивление между контактами 4 и 6 или между контактами 2 и 7 штепсельного разъема шины орудия с подключенным ТВС и без подключенных ECU должно быть более 5 МОм.
Для TQPL измерение сопротивления между подключенным выводом TBC_RTN ТВС и соединением жгута ECU_GND должно быть больше 1 МОм.
 |
1 - основной ориентирующий паз; 2 - передняя плоскость
_______________
Рисунок 20 - Требования к размерам розетки штепсельного разъема шины орудия
 |
Размер контакта | Минимальный внешний диаметр | Максимальный внешний диаметр | Диапазон сечений, мм | Диапазон сечений |
A | 4,83 | 6,10 | 8 до 5 | 8 до 10 |
B | 3,40 | 4,32 | 3 до 2 | 12 до14 |
C | 2,00 2 | 3,40 | 1 до 0,5 | 16 до 20 |
Рисунок 20, лист 2
 |
1 - уплотнение; 2 - следует использовать уплотнение типа E для минимального внешнего диаметра
_______________
Рисунок 21 - Размеры штепсельной вилки разъема шины орудия
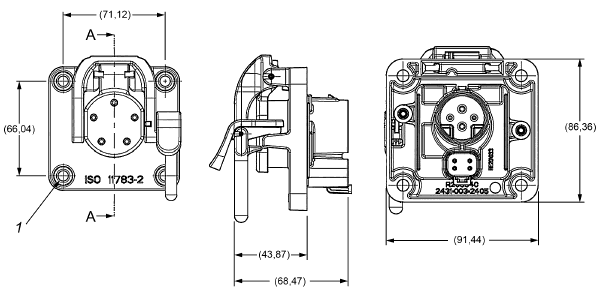 |
Рисунок 22 - Максимальные размеры штепсельного разъема шины орудия
Таблица 20 - Назначение контактов разъема шины орудия
N контакта | Наименование | Размер контакта | Цвет провода | Комментарии |
1 | GND | A | Черный | Подключается отдельно от ECU_GND к отрицательной клемме источника питания трактора (питание 12 В). Все основные силовые нагрузки (двигатели и т.д.) должны использовать этот обратный путь |
2 | ECU_GND | B | Черный | Цепь должна использоваться только для обеспечения электрического возврата для электронных блоков управления, установленных на тракторах или орудиях. Этот вывод должен быть дополнительно электрически изолирован от GND и должен быть подключен к отрицательной клемме источника питания трактора (питание 12 В) |
3 | PWR | A | Красный | Электроэнергия для всех двигателей и т.д., которые обычно требуют значительного количества энергии и имеют тенденцию генерировать переходные процессы в линии питания |
4 | ECU_PWR | B | Красный | Надежный источник стабильного положительного источника питания 12 В, который должен использоваться для питания ECU, установленных на орудиях |
5 | TBC_DIS | C | Не регламентирован | Имеется только в разъемах (т.е. не для внешних подключений) для управляющего реле для автоматического подключения/отключения оконечных схем. Подключается к контакту 4 штепсельного разъема орудия |
6 | TBC_PWR | C | См. таблицу 12 | Электропитание для ТВС, которое не должно использоваться для каких-либо других целей. Подключен к ECU_PWR для TPPL IBBC |
7 | TBC_RTN | C | См. таблицу 12 | Предоставляет обратный путь для ТВС и не должен использоваться для каких-либо других целей. Подключен к ECU_GND для TPPL IBBC |
8 | CAN_H | С | См. таблицу 12 | Линия передачи данных в которой проходит высокое напряжение в доминантном состоянии |
9 | CAN_L | С | См. таблицу 12 | Линия передачи данных в которой проходит низкое напряжение в доминантном состоянии |
Определено на рисунке 10. | ||||
7.6.3.7 Обратная совместимость
Для обеспечения обратной совместимости, тракторы с TPPL должны обеспечивать питание схемы ТВС орудия с физическим уровнем из витых четырехжильных проводов. Это достигается подключением вывода TBC_PWR к линии ECU_PWR, а вывода TBC_RTN к линии ECU_GND.
В соответствии с электрическими параметрами разъема шины предохранитель(и) для подключения TBC_PWR к ECU_PWR должен(ны) быть на 1 A.
На следующих изображениях показаны возможные соединения.
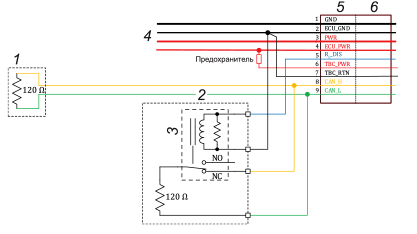 |
Рисунок 23 - Трактор с TPPL и задним штепсельным разъемом TPPL
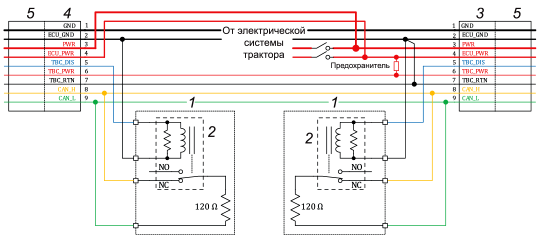 |
Рисунок 24 - Трактор с TPPL и передним и задним штепсельными разъемами TPPL (один предохранитель)
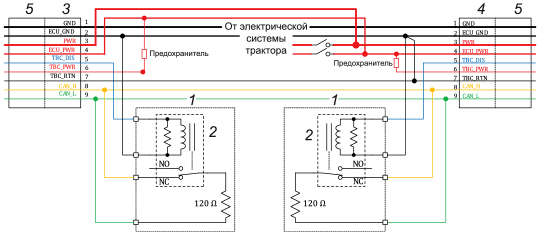 |
Рисунок 25 - Трактор с TPPL и передним и задним штепсельными разъемами TPPL (двойной предохранитель)
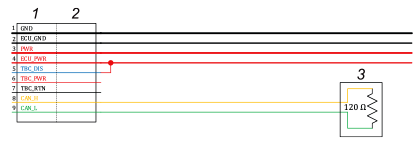 |
Рисунок 26 - Орудие с TPPL
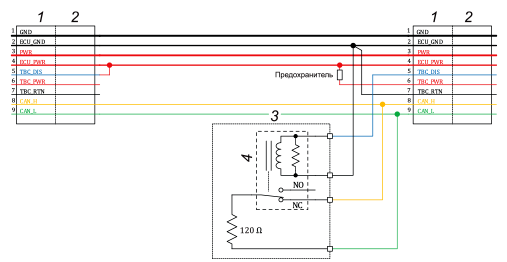 |
Рисунок 27 - Орудие с TPPL, последовательное соединение (один предохранитель)
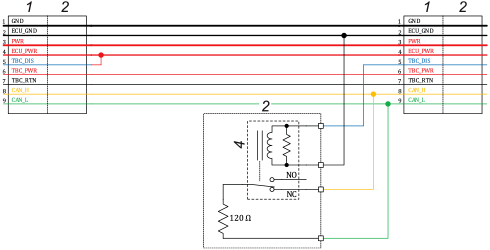 |
Рисунок 28 - Орудие с TPPL, последовательное соединение (без предохранителя)
7.6.4 Внутрикабинный разъем
7.6.4.1 Общие положения
В кабине должен быть разъем для подключения существующих компонентов, например виртуальных терминалов, дополнительных средств ввода или других ECU, установленных в кабине трактора, к шине ИСО 11783.
7.6.4.2 Размеры розетки внутрикабинного разъема
Розетка внутрикабинного разъема должна иметь размеры в соответствии с рисунком 29.
7.6.4.3 Назначение контактов внутрикабинного разъема
Девять контактов разъема должны иметь следующее назначение.
- контакт 1: Подключен к ECU_PWR;
- контакт 2: CAN_L вход;
- контакт 3: CAN_L выход;
- контакт 4: CAN_H вход;
- контакт 5: CAN_H выход;
- контакт 6: TBC_PWR (подключен к ECU_PWR для TPPL IBBC для обеспечения обратной совместимости);
- контакт 7: ECU_PWR;
- контакт 8: TBC_RTN (подключен к ECU_GND для TPPL IBBC для обеспечения обратной совместимости);
- контакт 9: ECU_GND.
Предел нагрузки на TBC_PWR и TBC_RTN должен соответствовать 7.3.2.
7.6.4.4 Размеры вилки внутрикабинного разъема
Вилка внутрикабинного разъема должна иметь размеры в соответствии с рисунком 30, чтобы соответствовать розетке внутрикабинного разъема.
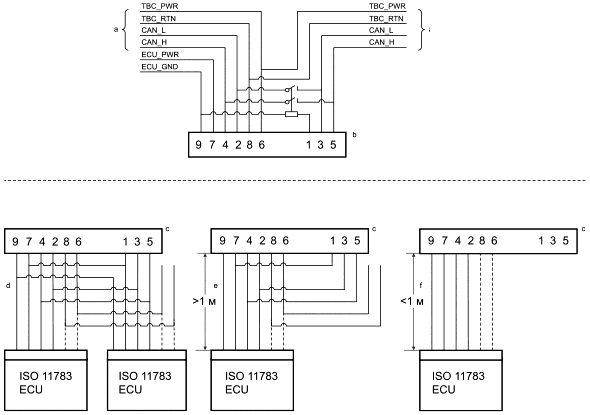
7.6.4.5 Соединения кабелей внутрикабинного разъема для TQPL
Подключение внутрикабинного разъема к контроллерам ИСО или терминалам дисплея показано на рисунке 31. Закорачивающая вилка не требуется для подключения входа CAN_L к выходу CAN_L и входа CAN_H к выходу CAN_H, когда к внутрикабинному разъему не подключены ни один контроллер или терминал. Когда питание отключено, используется нормально замкнутая релейная цепь для поддержания соединений CAN_H и CAN_L.
Возможны следующие три конфигурации подключения, как показано на рисунке 31.
а) Петля через разъем в кабине для удлинения шины. Реле получает питание от клеммы ECU_ PWR для прерывания шины на "стороне трактора". Разъемы шины предназначены для подключения нескольких ECU.
 |
1 - панель; 2 - 3/4-20 UNEF-2A; 3 - корпус разъема; 4 - уплотнение по периметру
Рисунок 29 - Размеры розетки внутрикабинного разъема
 |
Примечание - Опциональные размеры внутрикабинного разъема по AMP 206708 1.
1 - черный пластик; 2 - черный стеклонаполненный нейлон, 6/6; 3 - часть AMP; 4 - смежная поверхность
Рисунок 30 - Размеры вилки внутрикабинного разъема
b) Когда расстояние между ECU от разъема в кабине превышает 1 м, ECU подключается с помощью шлейфового соединения к шине, которое проходит через разъем в кабине. Соединения TBC_ PWR и TBC_RTN не возвращаются через разъем в кабине, а остаются разомкнутой цепью на разъеме. Реле получает питание от клеммы ECU_PWR для размыкания шины на "стороне трактора" разъема.
c) Когда расстояние между ECU и шиной составляет менее 1 м, ECU подключается непосредственно к шине как шлейф и не подключает CAN_H и CAN_L в последовательную цепь.
Если контроллер или дисплей обеспечивает сквозное соединение шины, он должен иметь внутреннюю схему, эквивалентную внешним соединениям, показанным для конфигурации, описанной в перечислении b) выше.
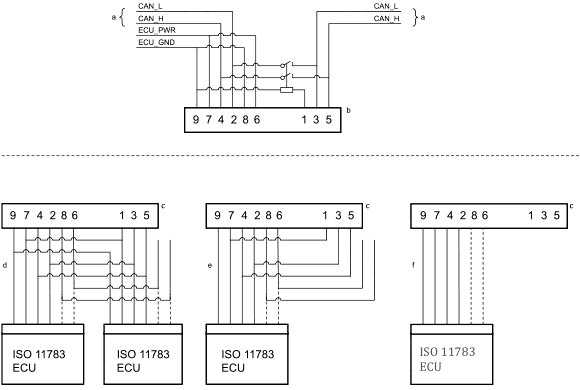
7.6.4.6 Соединения кабелей внутрикабинного разъема для TPPL
Подключение внутрикабинного разъема к контроллерам ИСО или терминалам дисплея показано на рисунке 32. Закорачивающая вилка не требуется для подключения входа CAN_L к выходу CAN_L и входа CAN_H к выходу CAN_H, когда к внутрикабинному разъему не подключены ни один контроллер или терминал. Когда питание отключено, используется нормально замкнутая релейная цепь для поддержания соединений CAN_H и CAN_L.
Возможны следующие три конфигурации подключения, как показано на рисунке 32.
a) Петля через разъем в кабине для удлинения шины. Реле получает питание от клеммы ECU_ PWR для прерывания шины на "стороне трактора". Разъемы шины предназначены для подключения нескольких ECU.
b) Если расстояние от ECU до разъема в кабине превышает 1 м, ECU подключается к шине с помощью шлейфового соединения, которое проходит через разъем в кабине. Реле получает питание от клеммы ECU_PWR для размыкания разъема шины на "стороне трактора".
c) Если расстояние между ECU и шиной составляет менее 1 м, ECU подключается непосредственно к шине в качестве шлейфа и не соединяет CAN_H и CAN_L гирляндой.
Если контроллер или дисплей обеспечивает сквозное соединение шины, он должен иметь внутреннюю схему, эквивалентную внешним соединениям, показанным для конфигурации, описанной в перечислении b) выше.
 |
_______________
Примечание - TBC_PWR и TBC_RTN маршрутизируются вместе с CAN_L и CAN_H в виде витого четырехжильного кабеля для целей ЭМС, но только один раз подключены к разъему "с".
Рисунок 31 - Кабель внутрикабинного разъема с витым четырехжильным кабелем
 |
_______________
Рисунок 32 - Кабель внутрикабинного разъема с TPPL
7.6.5 Диагностический разъем
7.6.5.1 Общие положения
Диагностический разъем облегчает поиск и устранение неисправностей сети ИСО 11783 и техническое обслуживание и должен находиться в кабине трактора в легкодоступном месте. Длина шлейфа между магистралью сети и диагностическим разъемом должна быть минимизирована, чтобы соответствовать длине кабеля от диагностического разъема до CAN-приемопередатчика сервисного инструмента. Разъем и связанные с ним выводы должны соответствовать электрическим характеристикам таблицы 19.
7.6.5.2 Размеры розетки
Розетка диагностического разъема должна иметь размеры, указанные на рисунке 33.
7.6.5.3 Размеры запираемой вилки
Разъемы запираемой вилки диагностического разъема приведены на рисунке 34.
7.6.5.4 Размеры незапираемой вилки
Разъемы незапираемой вилки диагностического разъема приведены на рисунке 35.
7.6.5.5 Назначение контактов
Назначение контактов диагностического разъема указано в таблице 21.
Примечание - Диагностический разъем также используется в промышленности в аккумуляторных системах на 24 В.
 |
1 - главное центрирующее ребро; 2 - резьба 1,375-18 UNEF-2A
_______________
Рисунок 33 - Размеры розетки диагностического разъема
 |
1 - главное центрирующее ребро; 2 - резьба 1,375-18 UNEF-2A
Рисунок 34 - Размеры запираемой вилки диагностического разъема
 |
1 - главное центрирующее ребро; 2 - резьба 1,375-18 UNEF-2A
Рисунок 35 - Размеры незапираемой вилки диагностического разъема
Таблица 21 - Назначение контактов диагностического разъема
Номер контакта | Назначение |
A | ECU_GND |
B | Неотключаемое питание |
C | CAN_H шины трактора |
D | CAN_L шины трактора |
E | Не указано |
F | Не указано |
G | Не указано |
H | CAN_H шины орудия |
J | CAN_L шины орудия |
Прямое подключение питания 12 В или 24 В через предохранитель 10А. Используется для защиты в сети SAE J1939 в диагностическом разъеме SAE. Используется в сети SAE J1708 [5] в диагностическом разъеме SAE. | |
7.6.5.6 Размеры диагностического разъема
Диагностический разъем должен иметь размеры интерфейса, указанные на рисунке 36.
 |
Примечание - Расположение всех полостей должно быть ±0,05 от осевых линий.
1 - шпоночный паз; 2 - центрирующее ребро
Рисунок 36 - Требования к размерам интерфейса диагностического разъема
 |
_______________
Рисунок 36, лист 2
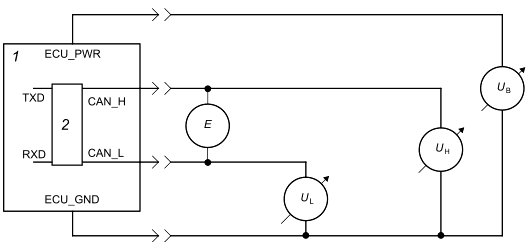
8 Испытания
8.1 Общие положения
Все следующие испытания должны быть выполнены и пройдены тестируемым компонентом. Испытания ТВС не должны проводиться на устройствах, предназначенных для TPPL.
8.1.1 Рисунки 37-42 и формулы (2)-(4) показывают, как в принципе параметры, указанные в разделе 7, могут быть проверены производителями ECU, тогда как 8.1.2-8.1.6 являются общими требованиями для этих испытаний на соответствие.
8.1.2 Измерения должны быть проведены через ECU_GND или GND для ECU без отдельной клеммы ECU_GND. TBC_RTN не должен использоваться.
8.1.3 Испытания должны проводиться во всем рабочем диапазоне напряжений ECU, которое должно составлять не менее 10-16 В; в то время как производитель несет ответственность за проверку любых приложений, требующих более широкого диапазона напряжений.
8.1.4 Чтобы гарантировать работу шины при определенных неисправностях, многие параметры должны проверяться без заземления или питания, подключенного к ECU, или без подключения.
8.1.5 Все источники питания для испытания должны иметь внутренний импеданс, величина которого должна быть менее 0,1 Ом для всех частот ниже 5 МГц. Все измерительные устройства должны иметь входное сопротивление более 10 МОм, шунтированное менее чем на 10 пФ от постоянного тока до 5 МГц.
8.1.6 Должны быть доступны независимые средства, чтобы заставить тестируемый ECU попытаться инициировать передачу сообщения по шине CAN.
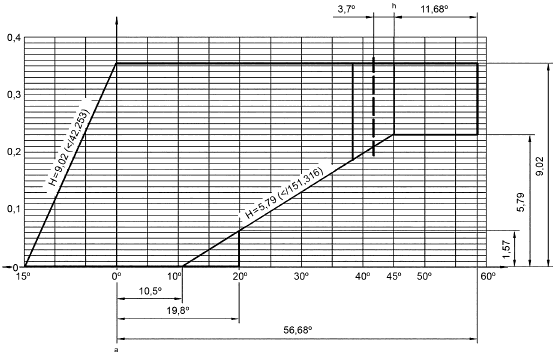
8.2 Внутреннее сопротивление
8.2.2 Выполняют это испытание в диапазоне U (диапазон напряжения: от -2 В до 8 В), который представляет смещения заземления между узлами на сегменте шины, для следующих сценариев подключения питания:
a) ECU подключен только к заземлению;
b) ECU подключен к линии 12 В и заземлению;
c) ECU не подключен ни к линии 12 В ни к заземлению;
d) ECU подключен только к линии 12 В.
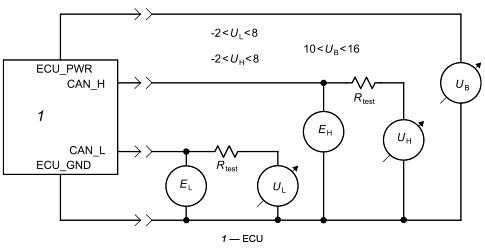 |
8.2.3 Подают напряжение смещения на CAN_H и CAN_L одновременно.
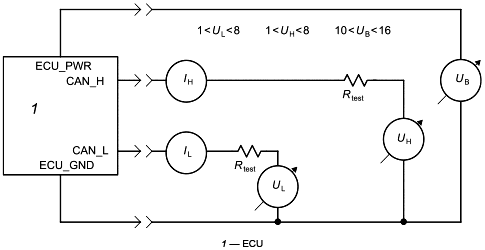
8.3 Дифференциальное внутреннее сопротивление
8.3.2 Выполняют это испытание в таком же диапазоне U и по тем же сценариям подключения питания, как указано в 5.5.2
 |
8.4 Порог рецессивного состояния ECU
8.4.1 Проверяют, что пороговое значение рецессивного входного дифференциального напряжения соответствует требованиям таблиц 7 и 9 по диапазону синфазного входного напряжения CAN и диапазону напряжения питания ECU.
8.4.3 При условиях по 8.4.2 сигнал RXD должен быть рецессивным (логическое ВЫСОКИЙ).
Данное испытание требует доступа к внутреннему приемопередатчику CAN сигналов RXD и TXD.
Приемопередатчик CAN должен оставаться в рецессивном состоянии во время проведения данного испытания.
 |
1 - ECU; 2 - приемопередатчик CAN: TXD привязан к ВЫСОКОМУ логическому уровню, чтобы удерживать приемопередатчик в рецессивном состоянии
Рисунок 39 - Проверка входного порога для обнаружения доминантных или рецессивных битов
8.5 Порог доминантного состояния ECU
8.5.1 Проверяют, что пороговое значение доминантного входного дифференциального напряжения соответствует требованиям таблиц 8 и 10 по диапазону синфазного входного напряжения CAN и диапазону напряжения питания ECU.
8.5.3 При условиях по 8.5.2 сигнал RXD должен быть доминантным (логическое НИЗКИЙ).
Данное испытание требует доступа к внутреннему приемопередатчику CAN сигналов RXD и TXD.
Приемопередатчик CAN должен оставаться в доминантном состоянии во время проведения данного испытания.
8.6 Доминантое состояние ECU
8.6.1 Измеряют доминантный выходной сигнал ECU, как показано на рисунке 40. Поскольку дифференциальное напряжение определяют по формуле (1), оно может быть измерено независимо, между сигнальными линиями шины CAN_H и CAN_L. В качестве альтернативы его можно найти как разницу между напряжением между CAN_H и заземлением и между CAN_L и заземлением. Величины выходных токов можно узнать непосредственно из данного испытания; коэффициент усиления тока должен быть рассчитан.
Примечание - Поскольку данный коэффициент, также, как и отклонения токов, определяется изготовителем, в таблице 16 не указаны допустимые значения.
Данное напряжение измеряют при помощи осциллографа. ECU при этом должен быть в состоянии передачи.
 |
1 - ECU
8.7 Внутренняя задержка ECU
8.7.3 Уровни рецессивного и доминантного напряжений устанавливаются испытательным устройством на соответствующие пороговые напряжения для приема. Это означает, что рецессивный уровень перезаписи составляет 0,5 В, а доминантный - 1,0 В и обеспечивает однозначно определенное соотношение между уровнями напряжения и временем внутренней задержки.
 |
_______________
9 Неисправности шины и нахождение неисправностей
9.1 Общие положения
Во время нормальной работы может произойти множество различных отказов шины, которые могут повлиять на работу. Для обеспечения безопасности при любых условиях эти сбои и связанное с ними поведение сети описаны в следующих разделах.
9.2 Потеря соединения с сетью
Если узел отключается от сегмента шины, оставшиеся узлы должны продолжать связь. Исключением из этого требования являются мосты, шлюзы и маршрутизаторы, поскольку связь между сегментами шины на разных портах такого устройства была бы невозможна в данных обстоятельствах.
9.3 Потеря питания или заземления узлом
a) Если узел теряет питание или находится в состоянии низкого напряжения, сегмент шины, к которому он подключен, не должен быть электрически нагружен, а оставшиеся узлы должны продолжать связь.
b) Если узел теряет заземление, напряжения в сегменте шины, к которому он подключен, не должны повышаться, а оставшиеся узлы должны продолжать связь.
9.4 Реакция на нестабильное напряжение питания
ECU в сети должны быть выдерживать переходные процессы и прерывания напряжения питания 12 В постоянного тока, реагируя в соответствии со следующими требованиями:
1) если ECU_PWR восстановлено в пределах 2 мс и если между прерываниями проходит не менее чем 98 мс (результирующий период 100 мс) должно выполняться следующее:
- не теряется нормальная связь по сети или пересылаемые сообщения,
- не перезагружается процессор,
- не происходит потери данных в оперативной памяти, таких как информация о конфигурации сети или пересылаемые по сети сообщения;
2) если ECU_PWR отключается на период более 2 мс, но менее 1 с, ECU может или продолжать нормально работать или перезагружаться;
3) если ECU_PWR отключается на период 1 с или более, ECU должен выполнить загрузку при включении питания.
В целях тестирования источник питания, используемый для выполнения теста, должен обеспечивать в три раза больший ток, чем потребляет ECU при напряжении питания 12 В постоянного тока.
9.5 Сбои в работе сети при соединении, отсоединении или включении питания
Соединение, отсоединение или включение питания ECU не должно нарушать работу сети.
9.6 Обрывы и замыкания
В общем случае сбои шины обнаруживаются при значительном уровне уничтожения сообщений, что может быть интерпретировано ECU или контроллерами CAN. Случаи внешних событий, которые могут вызвать сбои при требуемом отклике сети, перечислены и описаны ниже (см. рисунок 42). ECU должен вернуться в отказоустойчивое состояние работы, если состояние отказа не обеспечивает целостность связи с другими ECU в сети, которая требуется для его нормальной работы. ECU должны сохранять диагностические коды неисправностей в случаях, когда обнаруживаемые обрыв или замыкания являются кратковременными.
Случай 1: обрыв CAN_H между "первым" или "последним" ECU и ТВС.
Обмен данными должен продолжаться между всеми узлами. Может произойти уменьшение отношения сигнал/шум или увеличение электромагнитного излучения, или и то, и другое. (Размах CAN_H по существу вдвое больше, чем CAN_L, что позволяет продолжать работу.)
Случай 2: замыкание между CAN_H и ECU_PWR.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 3: замыкание между CAN_L и GND.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 4: замыкание между CAN_H и GND.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 5: обрыв CAN_H.
Обмен данными должен иметь возможность продолжаться между узлами на каждой стороне прерывания, даже если может быть невозможно поддерживать связь между узлами во время прерывания. ECU должен вернуться в безопасное состояние работы, если он полагается на связь с ECU на другой стороне прерывания. Может наблюдаться уменьшение отношения сигнал/шум между узлами на противоположных сторонах прерывания.
Случай 6: обрыв CAN_L.
Обмен данными должен иметь возможность продолжаться между узлами на каждой стороне прерывания, даже если может быть невозможно поддерживать связь между узлами во время прерывания. ECU должен вернуться в безопасное состояние работы, если он полагается на связь с ECU на другой стороне прерывания. Может наблюдаться уменьшение отношения сигнал/шум между узлами на противоположных сторонах прерывания.
Случай 7: замыкание между CAN_L и ECU_PWR.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 8: замыкание между TBC_PWR и GND.
Обмен данными должен продолжаться между всеми узлами, если TBC_PWR изолирован от ECU_PWR цепью ограничения тока или предохранителем. Отношение сигнал/шум может снизиться, поскольку система работает только с одним ТВС и неправильными уровнями сигнала.
Случай 9: замыкание между CAN_H и CAN_L.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 10: обрыв TBC_PWR в шлейфе.
Обмен данными должен продолжаться между всеми узлами. Отношение сигнал/шум может снизиться, поскольку сигнальные линии нагружены на землю ТВС, которые не имеют питания.
Случай 11: обрыв обеих сигнальных линий шины в одной точке.
Обмен данными между узлами на противоположных сторонах от обрыва невозможен. Обмен данными между узлами на той же стороне обрыва должен иметь возможность продолжаться, но это может происходить с уменьшенным отношением сигнал/шум. ECU должен вернуться в безопасное состояние работы, если он полагается на связь с ECU на другой стороне прерывания.
Случай 12: обрыв TBC_RTN в шлейфе.
Обмен данными между узлами невозможен. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 13: обрыв CAN_L между "первым" или "последним" ECU и ТВС.
Обмен данными между узлами должен продолжаться. Может произойти уменьшение отношения сигнал/шум или увеличение электромагнитного излучения, или и то, и другое. (Размах CAN_H по существу вдвое больше, чем CAN_L, что позволяет продолжать работу.)
Случай 14: обрыв питания до ТВС.
Обмен данными между узлами невозможен. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 15: обрыв заземления до ТВС.
Обмен данными между узлами невозможен. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 16: CAN_H и CAN_L одновременно открыты к ECU [т.е. потеря связи с сегментом шины (см. 8.2)].
Если узел отключается от своего сегмента шины, остальные узлы должны иметь возможность продолжать связь, за исключением одного ECU. Одиночный ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 17: обрыв питания узла.
Если узел теряет питание или находится в состоянии низкого напряжения, оставшиеся узлы должны иметь возможность продолжать связь.
Случай 18: обрыв заземления узла.
Если узел теряет заземление, оставшиеся узлы должны иметь возможность продолжать связь.
Случай 19: обрыв одной ТВС.
Обмен данными должен продолжаться между всеми узлами. Обнаружение неисправности каким-либо ECU скорее всего невозможно. Может произойти снижение отношения сигнал/шум и увеличение электромагнитного излучения, потому что носитель больше не терминируется должным образом. Если оба ТВС отключены, связь может прерваться.
Случай 20: замыкание между CAN_H и TBC_PWR.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 21: замыкание между CAN_L и TBC_PWR.
Передача данных невозможна. ECU должен быть в состоянии обнаружить это состояние неисправности и вернуться в отказоустойчивое состояние работы.
Случай 22: отклонения параметров топологии (т.е. длина шины или жгута, узла, размещение узлов, сопротивление проводников).
Обмен данными через шину возможен, но с уменьшением отношения сигнал/шум и возможной потерей арбитража.
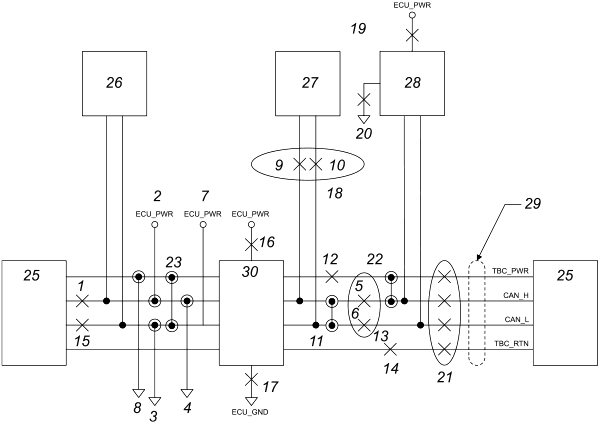 |
Примечание - См. 9.4.
Рисунок 42 - Возможные отказы из-за внешних причин
Приложение A
(справочное)
Синхронизация и наименование контроллера протокола
А.1 Разделение бита на сегменты
Различные поставщики интегральных схем контроллера протокола CAN используются для обозначения битовых сегментов (см. рисунок A.1). Однако считается, что эта общая группировка дает представление о работе и настройке этих схем. Поскольку эти определения не являются постоянными, возможно, что 2-битовые сегменты в одной реализации могут быть определены как один бит в другой реализации. Поэтому возможно, что отдельные IC контроллера протокола не могут быть настроены для разделения битов на сегменты как описано далее.
 |
1 - точка считывания (момент времени, в который состояние шины считывается и интерпретируется как значение бита)
_______________
Рисунок A.1 - Разделение бита на сегменты
А.2 Время внутренней задержки
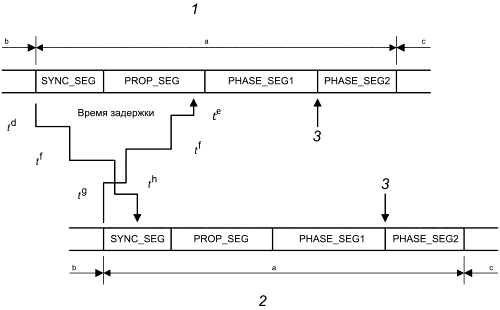 |
1 - время бита ECU A; 2 - время бита ECU B; 3 - точка считывания
_______________
Примечание 1 - Сумма выходных и входных задержек ECU; при отключенном от шины ECU, по отношению к времени синхронизации битов является критическим параметром. Важным параметром характеристики ECU является t_ECU=t_Output+t_lnput [where_=ECU (A, B ...)].
Примечание 2 - Для правильного арбитража должны быть выполнены следующие условия:
Примечание 3 - SYNC_SEG не учитывается, так как возможно, что этот сегмент будет потерян при фазовом сдвиге между модулями.
Примечание 5 - Приемлемые допуски протоколов IC и возможность потери синхронизации определены PHASE_SEG1 и 2.
Рисунок A.2 - Взаимодействие времени битов между ECU A и B при арбитраже
A.3 Синхронизация
Два вида синхронизации, жесткая синхронизация и ресинхронизация, подчиняются следующим правилам.
a) Допускается только одна синхронизация за одно время бита.
b) Граница используется для синхронизации только если значение в предыдущей точке считывания (ранее считанное состояние шины) отличается от состояния шины непосредственно после границы.
c) Жесткая синхронизация проводится на границе, независимо от рецессивного или доминантного состояния границы.
d) Все остальные границы рецессивный-доминантный, удовлетворяющие a) и b), используются для ресинхронизации, за исключением того, что передатчик не выполняет ресинхронизацию в результате границы рецессивный-доминантный с положительной фазовой ошибкой, если для ресинхронизации используются только границы рецессивный-доминантный.
A.4 Ширина скачка синхронизации (SJW)
A.5 Требования CAN к времени бита
Ограничения времени бита необходимы для того, чтобы ECU разных производителей могли правильно получать и интерпретировать действительные сообщения. Без этих ограничений при определенных условиях ECU может иметь несвоевременный доступ к сети, и диагностика сетевой системы намного сложнее.
Все IC контроллера протокола CAN делят битовое время на более мелкие части, определяемые как квант времени (tq). Поставщики IC рекомендуют, чтобы все ECU в сети были запрограммированы на одинаковые значения времени бита.
Для регистров времени бита в каждом контроллере протокола CAN требуются определенные значения. Эти значения определены для обеспечения надежной сети для всех ECU и основаны на наилучшем компромиссе между задержкой распространения и допуском тактовой частоты (существуют различия в определениях битовых сегментов, используемых разными производителями микросхем контроллера протокола CAN).
Для сегмента шины ИСО 11783 длиной 40 м, работающего на скорости 250 кбит/с, в таблице A.1 перечислены рекомендуемые фактические значения tq для типичных IC контроллера протокола для достижения одной точки выборки 80±3% (см. 4.6 и таблицу A.1). Рисунок A.3 иллюстрирует результирующее время бита для типичных IC контроллера протокола.
Таблица А.1 - Значения времени бита контроллера протокола CAN
Общее значение tq | 16 | 20 |
tq | 250 нс | 200 нс |
tSync-Seg (tq) | 1 | 1 |
tTSEG1 ( t q) | 12 | 15 |
tTSEG2 ( t q) | 3 | 4 |
SJW (tq) | 2 | 2 |
Общее время бита | 4 мкс | 4 мкс |
tTSEG1 = PROP_SEG + PHASE_SEG1. tTSEG2 = PHASE_SEG2. | ||
Примечание - Значения tq, перечисленные в таблице А.1, являются фактическими битовыми tq и не обязательно должны быть введены в регистры синхронизации битов контроллера протокола CAN.
 |
1 - точка считывания; 2 - SJW = 2 tq; 3 - tSync-Seg = 1 tq; 4 - tTSEG1 = 12 tq; 5 - tTSEG1 = 15 tq; 6 - tTSEG2 = 3 tq; 7 - tTSEG2 = 4 tq
Рисунок A.3 - Значения промежутков времени контроллера CAN
Приложение B
(справочное)
Примеры схем физического уровня
B.1 Общие положения
В этом приложении представлено несколько примеров схем физического уровня. Однако для полного узла ECU может потребоваться схема из более чем одного из этих примеров, чтобы соответствовать спецификациям этого документа. Более того, может потребоваться инвертировать логику или сдвинуть по величине логические уровни в примерную схему и обратно для достижения интерфейса с протоколом-контроллером или конструкциями программного обеспечения. В случае некоторых приложений также может быть приемлемо удалить выходы индикации состояния или возможность работы в несимметричном режиме.
В B.2-B.6 представлены, соответственно, примеры межсетевых соединений, иллюстрирующие использование разъемов и соединений узлов с различными ECU, оконечных схем, автоматических ТВС для использования с штепсельным разъемом шины, разъема для использования в ТВС и дополнительный разъем шлейфа, используемый ECU для подключения к сети.
B.2 Межсетевые соединения
На рисунке B.1 показано межсетевое соединение с использованием дополнительных и проприетарных разъемов ИСО 11783. Также показаны несколько возможных соединений TBC.
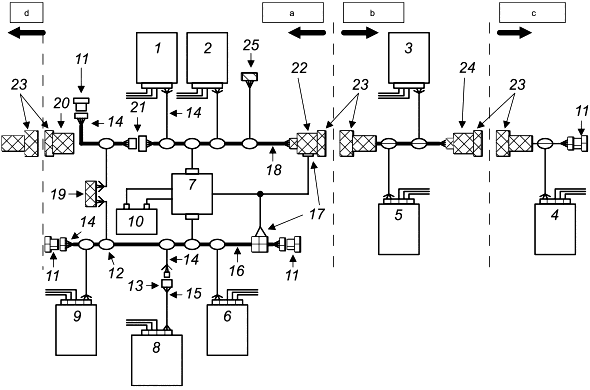 |
_______________
Рисунок B.1 - Межсетевые соединения
B.3 Оконечная схема
На рисунке В.2 представлена схема ТВС, в которой используются дискретные компоненты и регуляторы напряжения для обеспечения как напряжения смещения, так и оконечной нагрузки. Также предусмотрена защита от сбоев для ограничения рассеивания. На рисунке B.3 представлена схема фильтра ECU_PWR/ECU_GND.
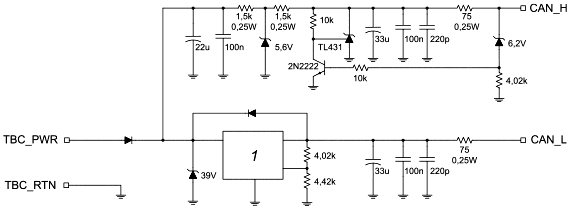 |
Примечание - Некоторые версии LM2931 (позиция 1) не подходят для этой схемы, поскольку они не рассчитаны на выходное напряжение до 2,5 В.
1 - S
T LM2931 D или аналог
Рисунок В.2 - Оконечная схема
 |
Рисунок B.3 - Схема фильтра ECU_PWR/ECU_GND
B.4 Автоматическая ТВС в штепсельном разъеме шины
В этом примере представлена печатная плата, обеспечивающая автоматическое включение и отключение ТВС в штепсельном разъеме шины. Он не детализирует фактические компоненты схемы, используемые для обеспечения как напряжения смещения, так и оконечной нагрузки, но описывает, как может быть получено автоматическое переключение при подключении второй половины штепсельного разъема шины. Также подробно описаны разъемы, необходимые для соединения с этим примерным модулем.
На рисунке B.4 показана версия, используемая на штепсельном разъеме орудия с подключением к источнику питания ECU, а на рисунке B.5 показана версия, используемая штепсельном разъеме орудия, которую можно использовать для подключения дополнительных орудий.
Примечание - Разъем орудия по рисунку 4 может быть использован для подключаемого спереди орудия.
В таблице B.1 показано назначение контактов для подключения питания ECU к автоматической ТВС, а в таблице B.2 - для соединений шины орудия с оконечной схемой.
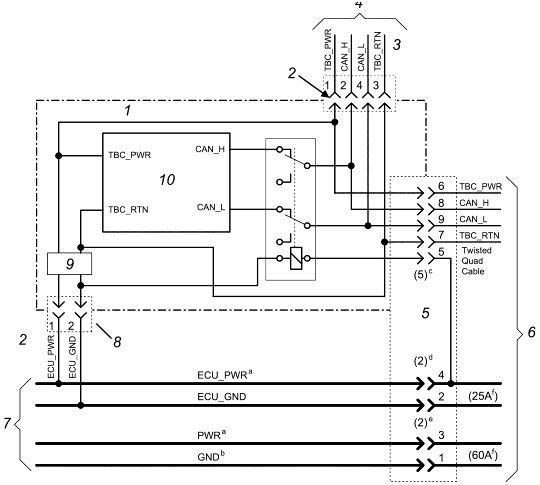 |
1 - модуль печатной платы; 2 - четырехконтактный разъем, контакты 16 размера; 3 - витой четырехжильный кабель; 4 - шина орудия на тракторе; 5 - штепсельный разъем шины орудия; 6 - к орудию; 7 - цепь питания трактора; 8 - двухконтактный разъем, контакты 16 размера; 9 - сетевой фильтр RF; 10 - оконечная схема
_______________
Рисунок B.4 - Автоматическая ТВС с разъемом питания сети в основном штепсельном разъеме шины
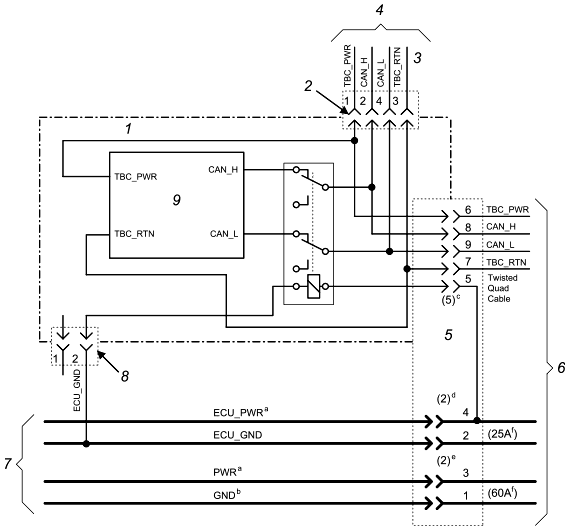 |
1 - модуль печатной платы; 2 - четырехконтактный разъем, контакты 16 размера; 3 - витой четырехжильный кабель; 4 - шина орудия; 5 - штепсельный разъем шины орудия; 6 - к следующему орудию; 7 - цепь питания трактора; 8 - двухконтактный разъем, контакты 16 размера; 9 - оконечная схема
_______________
Рисунок B.5 - Автоматическая ТВС в дополнительном штепсельном разъеме шины
Таблица B.1 - Назначение контактов питания ТВС в штепсельном разъеме шины орудия
N контакта | Наименование | Размер контакта | Комментарии |
1 | ECU_PWR | B | Используется для подачи положительного питания 12 В для установленных на орудиях ECU |
2 | ECU_GND | B | Используется только для возврата тока установленных на орудиях ECU. Точка присоединения к трактору должна быть возле отрицательного полюса питания 12 В. Этот контакт должен быть электрически изолирован от корпуса орудия |
Определено на рисунке 10. | |||
Таблица B.2 - Назначение контактов штепсельного разъема шины орудия с автоматической ТВС
N контакта | Наименование | Размер контакта | Комментарии |
1 | TBC_PWR | C | Предназначен только для питания ТВС |
2 | CAN_H | C | Линия передачи данных, на которой присутствует высокое напряжение в доминантном состоянии |
3 | TBC_RTN | C | Возвратная линия для ТВС, предназначена только для ТВС |
4 | CAN_L | C | Линия передачи данных, на которой присутствует низкое напряжение в доминантном состоянии |
Определено на рисунке 10. | |||
B.5 Опциональный блок ТВС
Опциональный блок ТВС доступен для использования с сетью ИСО 11783, когда автоматический ТВС не используется. Доступны две конфигурации. Одна обеспечивает питание сегмента шины путем подключения фильтрованного питания от клемм ECU_PWR и ECU_GND к линиям TBC_PWR и TBC_RTN. Другая обеспечивает только функцию оконечной схемы и использует TBC_PWR и TBC_RTN, запитанные где-то в другом месте данного сегмента шины. Эти две конфигурации отличаются друг от друга цветом корпуса.
B.6 Схемы контроля питания
На рисунке B.5 показан пример управления подключением питания штепсельного разъема шины орудия на тракторе. ИСО 11783-9 содержит подробную информацию о сообщениях, необходимых для управления питанием орудия и огней. ECU_GND должен быть помехозащищенным на источнике питания (см. 7.6.3.5 и таблицу 20).
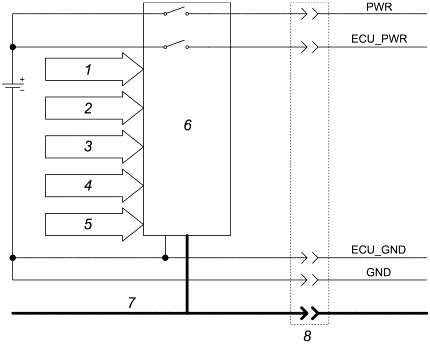 |
1 - ключ зажигания; 2 - выключатель освещения; 3 - рабочий выключатель; 4 - выключатель предупреждающих огней; 5 - главный выключатель; 6 - ECU трактора; 7 - шина орудия; 8 - разъем шины орудия
Рисунок B.6 - Примеры схем контроля питания
Приложение C
(справочное)
Опциональный разъем шлейфа ECU
C.1 Общие положения
Разъем шлейфа ECU является опциональным соединителем, используемым для присоединения ECU к его шлейфу на сегменте шины ИСО 11783. Через этот соединитель следует передавать только сигналы CAN_H и CAN_L.
Размеры разъема шлейфа ECU приведены на рисунке C.1.
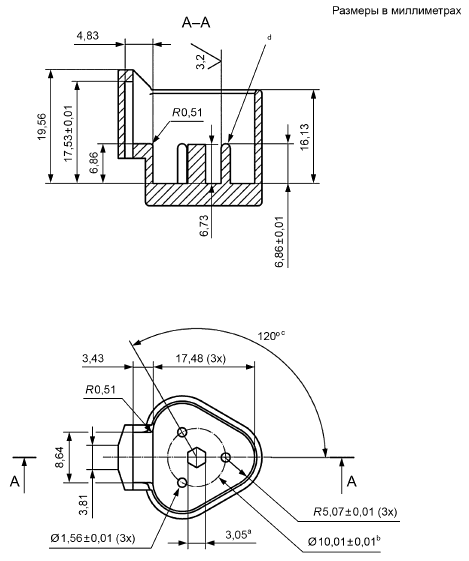 |
_______________
Рисунок C.1 - Размеры опционального разъема шлейфа ECU
Три контакта разъема должны иметь следующие назначения:
- контакт A: CAN_H;
- контакт B: CAN_L;
- контакт C: не используется или используется как защитный для сети по SAE J1939.
Размеры заглушки разъема шлейфа ECU должны соответствовать размерам разъема, указанным на рисунке C.1.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 11783-1 | IDT | ГОСТ Р ИСО 11783-1-2021 "Тракторы и машины для сельского и лесного хозяйства. Последовательная сеть управления и передачи данных. Часть 1. Общий стандарт на мобильную передачу данных" |
ISO 1724 | MOD | ГОСТ 9200-76 "Соединения семиконтактные разъемные для автомобилей и тракторов" |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичный стандарт; - MOD - модифицированный стандарт. | ||
Библиография
[1] | ISO 11783-9, Tractors and machinery for agriculture and forestry - Serial control and communications data network - Part 9: Tractor ECU |
[2] | ISO 11898-1, Road vehicles - Controller area network (CAN) - Part 1: Data link layer and physical signaling |
[3] | ISO 11898-2, Road vehicles - Controller area network (CAN) - Part 2: High-speed medium access unit |
[4] | ISO 11898-5 , Road vehicles - Controller area network (CAN) - Part 5: High-speed medium access unit with low-power mode |
_______________ Отменен. | |
[5] | ISO 14982, Agricultural and forestry machines - Electromagnetic compatibility - Test methods and acceptance criteria |
[6] | SAE J 1939-81 Recommended Practice for Serial Control and Communications Data Network - Part 81: Network Management |
_______________ Американское общество автомобильных инженеров. | |
[7] | SAE J 1708, Recommended Practice for Serial Data Communications between Microcomputer Systems in Heavy-Duty Vehicle Applications |
[8] | SAE J 1939-12, Recommended Practice for Serial Control and Communications Data Network - Part 12: Physical Layer - 250kbits/s - Twisted Quad Pair |
[9] | SAE J 1939-11, Recommended Practice for Serial Control and Communications Data Network - Part 11: Physical Layer - 250kbits/s - Twisted Shielded Pair |
[10] | SAE J 1939-15, Physical Layer, 250K bits/sec, Un-shielded twisted pair |
УДК 631.3:006.354 | ОКС 65.060.01 | IDT |
Ключевые слова: тракторы и машины сельскохозяйственные; последовательная сеть управления и передачи данных; физический уровень | ||
