ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТ Р 70609-2022
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Единая энергетическая система и изолированно работающие энергосистемы
РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Автоматические регуляторы возбуждения сильного действия синхронных генераторов. Испытания и проверка параметров настройки
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 РАЗРАБОТАН Акционерным обществом «Системный оператор Единой энергетической системы» (АО «СО ЕЭС»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 016 «Электроэнергетика»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 декабря 2022 г. № 1681-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины, определения и сокращения
4 Проверка параметров настройки автоматических регуляторов возбуждения сильного действия . . .3
5 Проведение испытаний автоматических регуляторов возбуждения сильного действия и алгоритмов их функционирования
Приложение А (обязательное) Методика проверки параметров настройки АРВ сильного действия на физической модели энергосистемы
Приложение Б (обязательное) Методика проверки параметров настройки АРВ сильного действия на цифровой модели энергосистемы
Приложение В (обязательное) Методика проверки параметров настройки АРВ сильного действия на математической модели энергосистемы
Приложение Г (обязательное) Методика проведения испытаний АРВ сильного действия и алгоритмов их функционирования на физической модели энергосистемы
Приложение Д (обязательное) Методика проведения испытаний АРВ сильного действия и алгоритмов их функционирования на математической модели энергосистемы с использованием ПАК РВ
Библиография
Введение
Настоящий стандарт разработан с учетом положений правил [1], требований [2] и ГОСТ 21558.
Стандарт разработан в развитие указанных нормативных правовых актов и ГОСТ 21558 и направлен на обеспечение выполнения положений указанных нормативных документов.
Настоящий стандарт разработан для обеспечения выполнения требований [2] (пункты 18—24) и является документом, регламентирущим основные требования по проверке параметров настройки автоматических регуляторов возбуждения сильного действия синхронных генераторов и по проведению испытаний автоматических регуляторов возбуждения сильного действия и алгоритмов их функционирования.
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Единая энергетическая система и изолированно работающие энергосистемы
РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Автоматические регуляторы возбуждения сильного действия синхронных генераторов. Испытания и проверка параметров настройки
United power system and isolated power systems. Relay protection and automation. Automatic voltage regulators of strong action of synchronous generators. Testing and checking the settings
Дата введения — 2023—02—01
1 Область применения
1.1 Настоящий стандарт устанавливает:
- требования к проведению проверки и корректировки выбранных параметров настройки автоматических регуляторов возбуждения сильного действия синхронных генераторов (далее — АРВ сильного действия) на моделях энергосистемы, включая методики проверки параметров настройки АРВ сильного действия на физической и цифровой моделях энергосистемы, а также на математической модели энергосистемы с использованием цифрового программно-аппаратного комплекса моделирования энергосистем в режиме реального времени (далее — ПАК РВ);
- требования к проведению испытаний АРВ сильного действия и их алгоритмов функционирования, реализующих законы управления указанных АРВ (далее — алгоритмы функционирования АРВ сильного действия), включая методику проведения таких испытаний на физической и математической моделях энергосистем с использованием ПАК РВ.
1.2 Настоящий стандарт распространяется на АРВ сильного действия.
1.3 Настоящий стандарт предназначен:
- для системного оператора электроэнергетических систем России (далее — системный оператор), а в период до 31 декабря 2023 г. включительно также для субъектов оперативно-диспетчерского управления в электроэнергетике в технологически изолированных территориальных электроэнергетических системах;
- собственников и иных законных владельцев объектов по производству электрической энергии или входящего в их состав генерирующего оборудования, функционирующих в составе Единой энергетической системы России или технологически изолированных территориальных электроэнергетических систем [далее — собственник или иной законный владелец электростанции (генерирующего оборудования)];
- организаций, привлекаемых собственниками или иными законными владельцами электростанций (генерирующего оборудования) для проверки параметров настройки АРВ сильного действия;
- заводов — изготовителей АРВ сильного действия и иных организаций, осуществляющих разработку алгоритмов функционирования АРВ сильного действия (далее — изготовители);
- организаций, привлекаемых собственниками или иными законными владельцами электростанций (генерирующего оборудования) или изготовителями для проведения испытаний АРВ сильного действия.
1.4 Положения настоящего стандарта необходимо учитывать при проведении испытаний АРВ сильного действия и их алгоритмов функционирования, выборе, проверке и корректировке параметров настройки АРВ сильного действия и их реализации на электростанциях.
Издание официальное
Соблюдение требований настоящего стандарта является обязательным в отношении АРВ сильного действия и генерирующего оборудования с учетом особенностей, установленных требованиями [2] (пункты 3, 4).
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ГОСТ 21558 Системы возбуждения турбогенераторов, гидрогенераторов и синхронных компенсаторов. Общие технические условия
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины, определения и сокращения
3.1 В настоящем стандарте применены термины по ГОСТ 21558, а также следующие термины с соответствующими определениями:
3.1.1 номер версии алгоритма функционирования АРВ сильного действия: Индивидуальный цифровой, буквенный или буквенно-цифровой набор (номер), в том числе входящий в состав номера версии программного обеспечения АРВ сильного действия, отличающий указанную версию алгоритма функционирования АРВ сильного действия от других версий и подлежащий изменению при внесении изменений в закон управления АРВ сильного действия (включая изменения, вносимые при модификации, иной переработке или адаптации закона управления АРВ сильного действия).
3.1.2 верифицированная цифровая модель АРВ сильного действия: Цифровая модель АРВ сильного действия, полученная по результатам проведенных в соответствии с требованиями [2] (пункт 18) испытаний АРВ сильного действия и алгоритмов его функционирования.
3.2 В настоящем стандарте использованы следующие сокращения:
АРВ — автоматический регулятор возбуждения;
БСВ — бесщеточная система возбуждения;
е.в.н. — единица возбуждения номинальная;
е.н.с. — единица напряжения статора;
КЗ — короткое замыкание;
ЛЭП — линия электропередачи;
ОАПВ — однофазное автоматическое повторное включение;
ОМВ — ограничитель минимального возбуждения;
о.е. — относительные единицы;
ПА — противоаварийная автоматика;
ПК — программный комплекс;
РУ — распределительное устройство;
СВ — система возбуждения;
СТН — статическая тиристорная независимая система возбуждения;
ТАПВ — трехфазное автоматическое повторное включение;
УРОВ — устройство резервирования отказа выключателя;
ШНН — шины неизменного напряжения;
ЭДС — электродвижущая сила;
ЭС — электрическая станция;
RTDS — цифровой программно-аппаратный комплекс моделирования энергосистем в режиме реального времени (Real Time Digital Simulator).
4 Проверка параметров настройки автоматических регуляторов возбуждения сильного действия
4.1 Проверка и корректировка (при необходимости, выявленной в процессе проверки) параметров настройки АРВ сильного действия (далее — проверка параметров настройки АРВ сильного действия) должна обеспечиваться собственником или иным законным владельцем электростанции (генерирующего оборудования) в соответствии с требованиями [2] (пункты 19—23).
4.2 Проверка параметров настройки АРВ сильного действия может выполняться:
- на физической модели энергосистемы;
- цифровой модели энергосистемы;
- математической модели энергосистемы с использованием ПАК РВ.
Тип модели энергосистемы, на которой должна выполняться проверка параметров настройки АРВ сильного действия, должен определяться согласно требованиям [2] (приложение 2).
4.3 Проверку параметров настройки АРВ сильного действия на физической модели энергосистемы следует выполнять в соответствии с методикой, предусмотренной приложением А.
4.4 Проверку параметров настройки АРВ сильного действия на цифровой модели энергосистемы следует выполнять в соответствии с методикой, предусмотренной приложением Б.
4.5 Проверку параметров настройки АРВ сильного действия на математической модели энергосистемы с использованием ПАК РВ следует выполнять в соответствии с методикой, предусмотренной приложением В.
4.6 Организация (испытательная лаборатория, испытательный центр), привлекаемая собственником или иным законным владельцем электростанции (генерирующего оборудования) для проведения проверки параметров настройки АРВ сильного действия:
- должна иметь в своем штате не менее трех экспертов, имеющих опыт выполнения на физической или математической, или цифровой модели энергосистемы работ по проверке параметров настройки АРВ сильного действия [включая опыт по настройке каналов регулирования и стабилизации и (или) системных стабилизаторов АРВ сильного действия] не менее одного года при наличии высшего профессионального образования по направлению «Электроэнергетика и электротехника»;
- должна быть оснащена соответствующей производственно-технической базой (техническими средствами), необходимой для проверки параметров настройки АРВ сильного действия, включая физическую модель энергосистемы или математическую модель энергосистемы, созданную с применением ПАК РВ.
Примечание — Требование не применяют для случая проведения проверки параметров настройки на цифровой модели энергосистемы;
- должна обладать ПК, необходимым для проведения расчетов переходных режимов и динамической устойчивости.
4.7 В отношении вновь вводимого (реконструируемого, модернизируемого) генерирующего оборудования, новых (модернизированных) АРВ сильного действия проверка и корректировка выбранных параметров настройки АРВ должны быть выполнены до начала комплексного опробования генерирующего оборудования на электростанции.
4.8 Проверку параметров настройки АРВ сильного действия на физической и математической моделях энергосистемы следует проводить по программе проверки, разработанной собственником или иным законным владельцем электростанции (генерирующего оборудования) или привлеченной им для проведения проверки организацией.
Программа проверки параметров настройки АРВ сильного действия должна быть согласована собственником или иным законным владельцем электростанции (генерирующего оборудования) с системным оператором (в случае проверки параметров настройки АРВ сильного действия, установленного на электростанции, входящей в состав технологически изолированной территориальной электроэнергетической системы, в период до 31 декабря 2023 г. — с соответствующим субъектом оперативно-диспетчерского управления в электроэнергетике) в порядке, установленном требованиями [2] (пункт 22).
При согласовании программы проверки параметров настройки АРВ сильного действия состав характерных режимов может быть расширен дополнительными режимами, отражающими наиболее тяжелые схемно-режимные условия.
4.9 Информация о результатах проверки параметров настройки АРВ сильного действия с указанием наименования АРВ сильного действия, его типа (марки), изготовителя, номера версии алгоритма функционирования, наименования электростанции, станционного номера генерирующего оборудования, в составе которого установлен проверяемый АРВ сильного действия, и приложением копии отчета проведенной проверки, а также реализованного в регуляторе возбуждения полного перечня параметров настройки АРВ сильного действия должна быть направлена собственником или иным законным владельцем электростанции (генерирующего оборудования) системному оператору (в случае проверки параметров настройки АРВ сильного действия, установленного на электростанции, входящей в состав технологически изолированной территориальной электроэнергетической системы, в период до 31 декабря 2023 г. — также соответствующему субъекту оперативно-диспетчерского управления в электроэнергетике) в сроки, указанные в требованиях [2] (пункт 24).
В отношении вновь вводимого (реконструируемого, модернизируемого) генерирующего оборудования, новых (модернизированных) АРВ сильного действия синхронных генераторов, относящихся к объектам диспетчеризации, указанные информация и документы должны быть представлены субъекту оперативно-диспетчерского управления до подачи диспетчерской заявки на включение генерирующего оборудования в работу для проведения его комплексного опробования.
5 Проведение испытаний автоматических регуляторов возбуждения сильного действия и алгоритмов их функционирования
5.1 Испытания АРВ сильного действия и алгоритмов их функционирования (далее — испытания) следует проводить в соответствии с требованиями [2] (пункт 18) с целью подтверждения соответствия АРВ сильного действия требованиям [2].
5.2 Проведение испытаний может выполняться:
- на физической модели энергосистемы;
- математической модели энергосистемы с использованием ПАК РВ.
Тип модели энергосистемы (физическая или математическая), на которой проводят испытания, определяют по решению производителя АРВ сильного действия, собственника или иного законного владельца объекта электроэнергетики, на котором планируется к установке (установлен) АРВ сильного действия, или иного лица, заинтересованного в проведении испытаний (далее совместно именуются «владелец АРВ сильного действия»).
5.3 Проведение испытаний на физической модели энергосистемы следует выполнять в соответствии с методикой, предусмотренной приложением Г.
5.4 Проведение испытаний на математической модели энергосистемы с использованием ПАК РВ следует выполнять в соответствии с методикой, предусмотренной приложением Д.
5.5 Объектом испытаний является АРВ сильного действия с заложенным в нем алгоритмом функционирования.
5.6 Действие результатов испытаний распространяется на тип (марку) и алгоритм функционирования (версию алгоритма функционирования) АРВ сильного действия.
В случае идентичности типа (марки) АРВ сильного действия действие результатов испытаний не распространяется на АРВ сильного действия, номер версии алгоритма функционирования которых отличен от номера версии, соответствующего испытанному алгоритму функционирования АРВ сильного действия.
5.7 Испытания необходимо проводить по программе испытаний, минимальный объем которой представлен:
- для проведения испытаний на физической модели — в таблице Г.2 приложения Г;
- для проведения испытаний на математической модели энергосистемы с использованием ПАК РВ — в таблице Д.1 приложения Д.
5.8 Организация (испытательная лаборатория, испытательный центр), привлекаемая владельцем АРВ сильного действия для проведения испытаний (далее — организация, проводящая испытания):
- должна иметь в своем штате не менее трех экспертов, имеющих опыт выполнения на физической или математической модели энергосистемы работ по проведению испытаний АРВ сильного дей-4
ствия не менее одного года при наличии высшего профессионального образования по направлению «Электроэнергетика и электротехника»;
- должна быть оснащена соответствующей производственно-технической базой (техническими средствами), необходимой для проведения испытаний, включая физическую модель энергосистемы или математическую модель энергосистемы, созданную с применением ПАК РВ, с характеристиками, обеспечивающими проведение испытаний, и соответствующую требованиям приложения Г или Д.
5.9 Для проведения испытаний владелец АРВ сильного действия должен представить организации, проводящей испытания, следующие сведения и документы:
- общее техническое описание АРВ сильного действия, включающее тип, номинальные параметры, область применения (для каких типов СВ предполагается применение), структурную схему алгоритма функционирования АРВ сильного действия и ее описание;
- протоколы и методику заводских испытаний АРВ сильного действия с информацией о характеристиках испытательного стенда, на котором проводились указанные испытания;
- номер версии алгоритма функционирования АРВ сильного действия, применяемого на испытуемом АРВ сильного действия, подтвержденный письмом или иным официальным документом изготовителя;
- параметры настройки АРВ сильного действия для физической модели энергосистемы (математической модели энергосистемы).
5.10 Для проведения испытаний владелец АРВ сильного действия должен передать организации, проводящей испытания, два образца АРВ сильного действия в комплектации, обеспечивающей их подключение к физической модели энергосистемы (к интерфейсным блокам ПАК РВ).
5.11 АРВ сильного действия и алгоритм его функционирования считаются успешно прошедшими испытания в случае получения положительных результатов испытаний (подтверждения соответствия требованиям [2]) во всех экспериментах, предусмотренных методикой проведения испытаний. Минимальный состав экспериментов, который необходим для подтверждения соответствия АРВ сильного действия требованиям [2], представлен:
- для проведения испытаний на физической модели — в таблице Г.2 приложения Г;
- для проведения испытаний на математической модели энергосистемы с использованием ПАК РВ — в таблице Д.1 приложения Д.
5.12 Результаты испытаний оформляют протоколом. Протокол испытаний должен быть подписан всеми участниками испытаний и содержать в обязательном порядке следующую информацию:
- наименование и адрес владельца АРВ сильного действия;
- наименование и адрес организации, проводившей испытания;
- номер и дату протокола испытаний, нумерацию каждой страницы протокола, а также общее количество страниц;
- дату (период) проведения испытаний;
- место проведения испытаний;
- перечень лиц, принявших участие в испытаниях;
- ссылку на требования, на соответствие которым проведены испытания;
- программу испытаний;
- описание испытуемого АРВ сильного действия [наименование, тип (марка), наименование изготовителя, номинальные параметры, область применения, номер версии алгоритма функционирования, структурную схему алгоритма функционирования и ее описание с учетом внесенных при испытаниях изменений];
- описание физической модели энергосистемы (математической модели энергосистемы), на которой проводились испытания;
- результаты проведенных испытаний, содержащие материалы, характеризующие работу АРВ сильного действия в каждом из проведенных экспериментов;
- анализ результатов испытаний и оценку испытуемого АРВ сильного действия в каждом из проведенных экспериментов.
5.13 Информация о результатах испытаний с указанием наименования АРВ сильного действия, его типа (марки), изготовителя, номера версии алгоритма функционирования, в отношении которой проводились испытания, и приложением копии протокола испытаний должна быть направлена владельцем АРВ сильного действия (уполномоченным им лицом) системному оператору (в случае, если соответствующий объект по производству электрической энергии, на котором установлен (планируется к установке) АРВ, находится (будет находиться) в технологически изолированной территориальной электроэнергетической системе — также такому субъекту оперативно-диспетчерского управления в период до 31 декабря 2023 г.) в сроки, указанные в требованиях [2] (пункт 18).
Приложение А (обязательное)
Методика проверки параметров настройки АРВ сильного действия на физической модели энергосистемы
А.1 Этапы проверки параметров настройки АРВ сильного действия на физической модели энергосистемы
Проверка параметров настройки АРВ сильного действия на физической модели энергосистемы должна предусматривать:
- создание физической модели энергосистемы;
- разработку программы проверки параметров настройки АРВ сильного действия;
- выполнение работ по проверке параметров настройки АРВ сильного действия.
А.2 Создание физической модели энергосистемы
А.2.1 Создание физической модели энергосистемы должно предусматривать:
- разработку цифровой эталонной модели энергосистемы и выполнение в ней расчетов электрических режимов и устойчивости;
- создание цифровой эквивалентной модели энергосистемы;
- разработку, настройку и сборку электрической схемы физической модели энергосистемы;
- тестирование физической модели энергосистемы.
А.2.2 Разработка цифровой эталонной модели энергосистемы и выполнение в ней расчетов электрических режимов и устойчивости
Цифровая эталонная модель энергосистемы должна создаваться на основании информации о параметрах схемы, ее структуре, характерных текущих и перспективных режимах. На цифровой эталонной модели энергосистемы должны быть выполнены расчеты установившихся режимов, статической апериодической и колебательной устойчивости и электромеханических переходных процессов, с целью выявления схемно-режимных особенностей работы исследуемого генератора в энергосистеме для их учета при создании эквивалентной модели.
А.2.3 Создание цифровой эквивалентной модели энергосистемы
А.2.3.1 Эквивалентирование электрической схемы цифровой эталонной модели энергосистемы необходимо выполнять с использованием программ эквивалентирования. Используемая программа эквивалентирования должна обеспечить тождественное совпадение режимных параметров в полной схеме и сохраняемой части эквивалентной схемы, а также сохранение динамических свойств цифровой эталонной модели энергосистемы.
А.2.3.2 Степень детализации цифровой эквивалентной модели энергосистемы должна быть определена посредством оценки погрешностей эквивалентирования, полученных при выполнении сравнительных расчетов предельных электрических режимов в цифровых эталонной и эквивалентной моделях энергосистемы.
А.2.3.3 Сравнительные расчеты предельных режимов должны выполняться в цифровых эталонной и эквивалентной моделях энергосистемы с использованием одинаковых траекторий утяжеления.
А.2.3.4 Погрешность эквивалентирования |ДЭ|, %, вычисляют по формуле
|аэ| = ^эт-^эк ,100| (а.1)
где Р^эт — предельный переток активной мощности в контролируемом сечении в цифровой эталонной модели энергосистемы;
Р^эк — предельный переток активной мощности в контролируемом сечении в цифровой эквивалентной модели энергосистемы.
А.2.3.5 Степень детализации цифровой эквивалентной модели энергосистемы считают допустимой, если погрешность эквивалентирования, определенная по формуле (А.1), не превышает 5 %.
А.2.4 Создание физической модели энергосистемы
Физическая модель энергосистемы должна быть разработана на базе цифровой эквивалентной модели энергосистемы. Настройку физической модели энергосистемы выполняют посредством моделирования характерных электрических режимов и расчетных возмущений.
А.2.5 Тестирование физической модели энергосистемы
А.2.5.1 Тестирование физической модели энергосистемы необходимо выполнять посредством:
- проверки соответствия параметров электрических режимов в физической модели и цифровой эквивалентной модели энергосистемы;
- проверки соответствия параметров электрических режимов при технологических нарушениях (по данным регистраторов аварийных событий, регистраторов системы мониторинга переходных режимов) параметрам, полученным при воспроизведении этих технологических нарушений на физической модели энергосистемы.
А.2.5.2 Погрешность физического моделирования |ДМ|, %, вычисляют по формуле
Iam|=Pz“~Pim Ю0, (А.2)
'iSK
где Р^эк — предельный переток активной мощности в контролируемом сечении в цифровой эквивалентной модели энергосистемы;
Р^м — предельный переток активной мощности в контролируемом сечении в физической модели энергосистемы.
А.2.5.3 Физическую модель энергосистемы считают корректной, если погрешность моделирования, определенная по формуле (А.2), не превышает 5 %.
А.З Разработка программы проверки параметров настройки АРВ сильного действия
Программа проверки параметров настройки АРВ сильного действия должна предусматривать:
а) проверку предварительно выбранных и представленных собственником или иным законным владельцем электростанции параметров настройки АРВ сильного действия для характерных режимов в нормальной, ремонтных и послеаварийных схемах;
б) проверку параметров настройки АРВ сильного действия с учетом поэтапного ввода синхронных генераторов и сетевых объектов (при новом строительстве) или поэтапной реконструкции СВ и АРВ сильного действия (при замене СВ на действующих электростанциях);
в) корректировку (при необходимости) параметров настройки АРВ сильного действия с последующим проведением повторной проверки.
А.4 Выполнение работ по проверке параметров настройки АРВ сильного действия
А.4.1 Работы по проверке параметров настройки АРВ сильного действия на физической модели энергосистемы проводят в соответствии с программой, разработанной и согласованной в соответствии с А.З и 4.8.
А.4.2 Проверку параметров настройки АРВ сильного действия допускается проводить в присутствии представителей собственника или иного законного владельца электростанции (генерирующего оборудования), а также представителей изготовителя и системного оператора (в случае проверки параметров настройки АРВ сильного действия, установленного на электростанции, входящей в состав технологически изолированной территориальной электроэнергетической системы, — соответствующего субъекта оперативно-диспетчерского управления в электроэнергетике).
А.4.3 При необходимости собственник или иной законный владелец электростанции (генерирующего оборудования) совместно с представителями изготовителя выполняет корректировку параметров настройки АРВ сильного действия. В указанном случае должна быть выполнена повторная проверка в полном объеме соответствующей программы проверки параметров настройки АРВ сильного действия.
А .4.4 Параметры настройки АРВ сильного действия признаются успешно прошедшими проверку, если во всех экспериментах при выбранных параметрах настройки АРВ сильного действия выполняются все нижеприведенные критерии:
- отсутствие незатухающих синхронных колебаний при достижении предела передаваемой мощности;
- демпфирование колебаний в послеаварийных режимах;
- обеспечение внутригрупповой устойчивости (для многоагрегатных электростанций);
- обеспечение устойчивости работы синхронных генераторов с учетом действия устройств и комплексов ПА;
- обеспечение соответствия параметров настройки релейной форсировки возбуждения требованиям [2];
- обеспечение устойчивости работы синхронных генераторов в режиме ограничения минимального возбуждения.
Приложение Б (обязательное)
Методика проверки параметров настройки АРВ сильного действия на цифровой модели энергосистемы
Б.1 Этапы проверки параметров настройки АРВ сильного действия на цифровой модели энергосистемы
Проверка параметров настройки АРВ на цифровой модели энергосистемы должна предусматривать:
- подготовку цифровой модели энергосистемы;
- выбор расчетных условий;
- выполнение проверочных расчетов;
- оценку параметров настройки АРВ сильного действия.
Б .2 Подготовка цифровой модели энергосистемы
Б .2.1 Для проверки параметров настройки АРВ сильного действия должна использоваться цифровая модель энергосистемы, созданная в ПК расчета переходных режимов и динамической устойчивости на базе динамической модели объединенной энергосистемы и включающая электростанцию, для синхронного генератора которой выполняется проверка параметров настройки АРВ сильного действия.
Цифровая модель энергосистемы должна быть актуализирована на момент проведения проверки.
Б .2.2 При проведении проверки параметров настройки АРВ сильного действия в составе цифровой модели энергосистемы должна использоваться верифицированная цифровая модель АРВ сильного действия.
Б .2.3 Параметры настройки АРВ сильного действия должны быть заданы в верифицированной цифровой модели АРВ сильного действия в соответствии с полным перечнем настроек, представленным собственником или иным законным владельцем электростанции (генерирующего оборудования).
Б.З Выбор расчетных условий
Для каждого из режимов (зимнего и летнего максимума и минимума потребления энергосистемы) в ПК расчета установившихся режимов должны быть подготовлены характерные режимы, соответствующие:
- номинальной загрузке синхронного генератора по активной и реактивной мощности при номинальном напряжении статора в нормальной схеме (при включенном состоянии всех отходящих от электростанции ЛЭП, автотрансформаторов);
- номинальной загрузке синхронного генератора по активной мощности и потреблению максимально допустимой реактивной мощности в соответствии с диаграммой мощности синхронного генератора («Р—Q диаграмма») с учетом параметров настройки ОМВ (вблизи границы ОМВ) при номинальном напряжении статора. Для формирования режима допускается моделирование подключения к шинам электростанции конденсаторной батареи требуемой мощности;
- номинальной загрузке синхронного генератора по активной мощности при номинальном напряжении статора в единичных ремонтных схемах (при выводе в ремонт поочередно каждой из отходящих от РУ 110—750 кВ электростанции ЛЭП или автотрансформаторов связи);
- номинальной загрузке синхронного генератора по активной мощности при номинальном напряжении статора в двойных ремонтных схемах (при отключении поочередно каждой из отходящих от РУ 110—750 кВ электростанции ЛЭП или автотрансформаторов связи в каждой из ремонтных схем).
Б.4 Выполнение проверочных расчетов
Б .4.1 Проверочные расчеты следует выполнять в ПК расчета переходных режимов и динамической устойчивости.
Б .4.2 Проверочные расчеты электромеханических переходных процессов необходимо выполнять в каждом характерном режиме для трехфазных КЗ длительностью 0,02 с на шинах РУ 110—750 кВ, к которым через трансформатор подключен синхронный генератор с проверяемым АРВ сильного действия.
5 .4.3 Для АРВ сильного действия в каждом из характерных режимов необходимо выполнить два расчета электромеханического переходного процесса с параметрами настройки АРВ сильного действия, представленными собственником или иным законным владельцем электростанции (генерирующего оборудования), при указанном в Б.4.2 возмущении:
- с введенными в работу каналами стабилизации (с включенным системным стабилизатором);
- с выведенными из работы каналами стабилизации (с отключенным системным стабилизатором).
Б.4.4 По результатам расчета необходимо регистрировать следующие параметры электромеханического переходного процесса:
- активную мощность синхронного генератора;
- перетоки активной мощности по ЛЭП, отходящим от РУ электростанции.
Б.5 Оценка параметров настройки АРВ сильного действия
Б.5.1 Оценку параметров настройки АРВ сильного действия необходимо выполнять посредством анализа изменения параметров электромеханического переходного процесса, зарегистрированных в соответствии с Б.4.4.
Б.5.2 Критериями эффективности параметров настройки АРВ сильного действия являются:
- уменьшение времени затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) во всех характерных режимах по сравнению с временем затухания при выведенных каналах стабилизации (отключенном системном стабилизаторе);
- демпфирование электромеханических переходных процессов во всех характерных режимах на частоте колебаний ротора синхронного генератора за время не более 15 с.
Б.5.3 Если критерии эффективности параметров настройки АРВ сильного действия не выполняются хотя бы в одном из характерных режимов, параметры настройки АРВ сильного действия должны быть скорректированы.
Б.5.4 После корректировки параметров настройки АРВ сильного действия должны быть выполнены повторные проверочные расчеты в соответствии с Б.4. По результатам указанных расчетов должна быть выполнена оценка корректности новых параметров настройки АРВ сильного действия.
Приложение В (обязательное)
Методика проверки параметров настройки АРВ сильного действия на математической модели энергосистемы
В.1 Этапы проверки параметров настройки АРВ сильного действия на математической модели энергосистемы
Проверка параметров настройки АРВ сильного действия на математической модели энергосистемы с использованием ПАК РВ должна предусматривать:
- создание математической модели энергосистемы;
- разработку программы проверки параметров настройки АРВ сильного действия;
- выполнение работ по проверке параметров настройки АРВ сильного действия.
В.2 Создание математической модели энергосистемы
В.2.1 Для проверки параметров настройки АРВ сильного действия на математической модели энергосистемы следует использовать ПАК РВ типа RTDS или иной ПАК РВ с аналогичными характеристиками (далее по тексту настоящего раздела указанные ПАК РВ совместно именуются RTDS).
В.2.2 Создание математической модели энергосистемы должно предусматривать:
- разработку цифровой эталонной модели энергосистемы в ПК расчета установившихся режимов, переходных режимов и динамической устойчивости, и выполнение расчетов электрических режимов и устойчивости с использованием этих ПК;
- создание цифровой эквивалентной модели энергосистемы в ПК расчета установившихся режимов, переходных режимов и динамической устойчивости;
- создание математической модели энергосистемы с использованием RTDS (далее — математическая модель RTDS);
- тестирование математической модели RTDS.
В.2.3 Разработка цифровой эталонной модели энергосистемы и выполнение в ней расчетов электрических режимов и устойчивости с использованием ПК расчета установившихся режимов, переходных режимов и динамической устойчивости
Цифровую эталонную модель энергосистемы необходимо создавать на основании информации о параметрах схемы, ее структуре, характерных текущих и перспективных режимах в ПК расчета установившихся режимов, переходных режимов и динамической устойчивости. На цифровой эталонной модели энергосистемы в ПК расчета установившихся режимов, переходных режимов и динамической устойчивости должны быть выполнены расчеты установившихся режимов, статической апериодической и колебательной устойчивости и электромеханических переходных процессов, с целью выявления схемно-режимных особенностей работы исследуемого генератора в энергосистеме для их учета при создании эквивалентной схемы.
В.2.4 Создание цифровой эквивалентной модели энергосистемы
В.2.4.1 Эквивалентирование электрической схемы цифровой эталонной модели энергосистемы необходимо выполнять с использованием программ эквивалентирования. Используемая программа эквивалентирования должна обеспечить тождественное совпадение режимных параметров в полной схеме и сохраняемой части эквивалентной схемы, а также сохранение динамических свойств цифровой эталонной модели энергосистемы.
В.2.4.2 Степень детализации цифровой эквивалентной модели энергосистемы должна быть определена посредством оценки погрешностей эквивалентирования, полученных при выполнении сравнительных расчетов предельных электрических режимов в цифровых эталонной и эквивалентной моделях энергосистемы с использованием ПК расчета установившихся режимов.
В.2.4.3 Сравнительные расчеты предельных режимов необходимо выполнять в цифровых эталонной и эквивалентной моделях энергосистемы с использованием одинаковых траекторий утяжеления.
В.2.4.4 Погрешность эквивалентирования |ДЭ|, %, вычисляют по формуле
|дэ|= ^э-^эк ,100) (В.1)
Р£э
где Р^э — предельный переток активной мощности в контролируемом сечении в цифровой эталонной модели энергосистемы;
Р1эк — предельный переток активной мощности в контролируемом сечении в цифровой эквивалентной модели энергосистемы.
В.2.4.5 Степень детализации цифровой эквивалентной модели энергосистемы считают достаточной, если погрешность эквивалентирования, определенная по формуле (В.1), не превышает 5 %.
В.2.5 Создание математической модели RTDS
Математическая модель RTDS должна быть разработана на базе цифровой эквивалентной модели энергосистемы. Математическая модель RTDS должна включать:
- электрическую схему, содержащую модели генераторов, трансформаторов, ЛЭП, нагрузки и других элементов, входящих в эквивалентную цифровую модель энергосистемы;
- математические модели АРВ, регуляторов скорости, турбин и других элементов эквивалентной цифровой модели энергосистемы;
- подробные математические модели статических и бесщеточных СВ синхронных генераторов, для которых выполняется проверка параметров настройки АРВ сильного действия, позволяющие выполнить подключение АРВ сильного действия к математической модели RTDS в соответствии с документацией изготовителя. Подключение АРВ сильного действия к математической модели RTDS должно обеспечивать корректное функционирование АРВ сильного действия при выполнении всех экспериментов программы проверки параметров настройки АРВ сильного действия;
- элементы, обеспечивающие непосредственное управление состоянием математической модели RTDS и позволяющие моделировать характерные электрические режимы;
- элементы, обеспечивающие моделирование возмущений, предусмотренных программой проверки параметров настройки АРВ сильного действия, а также действие ПА при этих возмущениях.
В.2.6 Тестирование математической модели RTDS
В.2.6.1 Тестирование математической модели RTDS необходимо выполнять посредством:
- проверки соответствия параметров электрических режимов в математической модели RTDS и цифровой эталонной модели энергосистемы;
- проверки соответствия параметров электрических режимов при технологических нарушениях (по данным регистраторов системы мониторинга переходных режимов, либо по результатам расчетов с использованием цифровой эталонной модели энергосистемы) параметрам, полученным при воспроизведении этих технологических нарушений на математической модели RTDS.
В.2.6.2 Погрешность |ДЭ|, %, моделирования электрических режимов (из-за использования разных моделей оборудования и разных методов расчета на RTDS и в ПК расчета установившихся режимов) определяют по формуле
(В.2)
где Р^э — предельный переток активной мощности в контролируемом сечении в цифровой эталонной модели энергосистемы;
Р^м — предельный переток активной мощности в контролируемом сечении в математической модели RTDS.
В.2.6.3 Математическая модель RTDS считается прошедшей процедуру тестирования и может использоваться для проверки параметров настройки АРВ сильного действия, если:
а) погрешность моделирования, определенная по формуле (В.2), не превышает 5 %;
б) частоты колебаний параметров электрических режимов при технологических нарушениях, зафиксированные регистраторами системы мониторинга переходных режимов или рассчитанные с использованием цифровой эталонной модели энергосистемы, отличаются от частот колебаний параметров электрических режимов, полученных при воспроизведении этих технологических нарушений на математической модели RTDS не более чем:
- на 5 % в диапазоне частот колебаний 0,6 Гц и более;
- 0,1 Гц в диапазоне частот колебаний от 0,3 до 0,6 Гц;
- 0,05 Гц в диапазоне частот колебаний от 0,1 до 0,3 Гц.
В.З Разработка программы проверки параметров настройки АРВ сильного действия
Программа проверки параметров настройки АРВ сильного действия должна предусматривать:
а) проверку предварительно выбранных и представленных собственником или иным законным владельцем электростанции параметров настройки АРВ сильного действия для характерных режимов в нормальной, ремонтных и послеаварийных схемах;
б) проверку параметров настройки АРВ сильного действия с учетом поэтапного ввода синхронных генераторов и сетевых объектов (при новом строительстве) или поэтапной реконструкции СВ и АРВ сильного действия (при замене СВ на действующих электростанциях);
в) корректировку (при необходимости) параметров настройки АРВ сильного действия с последующим проведением повторной проверки.
В.4 Выполнение работ по проверке параметров настройки АРВ сильного действия
В.4.1 Работы по проверке параметров настройки АРВ сильного действия на математической модели RTDS проводят в соответствии с программой, разработанной и согласованной в соответствии с В.З и 4.8.
В.4.2 Проверку параметров настройки АРВ сильного действия допускается проводить в присутствии представителей собственника или иного законного владельца электростанции (генерирующего оборудования), а также представителей изготовителя и системного оператора (в случае проверки параметров настройки АРВ сильного действия, установленного на электростанции, входящей в состав технологически изолированной территориальной электроэнергетической системы, — соответствующего субъекта оперативно-диспетчерского управления в электроэнергетике).
В.4.3 При необходимости собственник или иной законный владелец электростанции (генерирующего оборудования) совместно с представителями изготовителя выполняет корректировку параметров настройки АРВ сильного действия. В указанном случае должна быть выполнена повторная проверка в полном объеме соответствующей программы проверки параметров настройки АРВ сильного действия.
В.4.4 Параметры настройки АРВ сильного действия признают успешно прошедшими проверку, если во всех экспериментах при выбранных параметрах настройки АРВ сильного действия выполняются все нижеприведенные критерии:
- отсутствие синхронных колебаний при достижении предела передаваемой мощности;
- демпфирование колебаний в послеаварийных режимах;
- обеспечение внутригрупповой устойчивости (для многоагрегатных электростанций);
- обеспечение устойчивости работы синхронных генераторов с учетом действия устройств и комплексов ПА;
- обеспечение соответствия параметров настройки релейной форсировки возбуждения требованиям [2];
- обеспечение устойчивости работы синхронных генераторов в режиме ограничения минимального возбуждения.
Приложение Г (обязательное)
Методика проведения испытаний АРВ сильного действия и алгоритмов их функционирования на физической модели энергосистемы
Г.1 Этапы подготовки и проведения испытаний
Испытания АРВ сильного действия и алгоритмов их функционирования на физической модели энергосистемы (далее — тестовая модель энергосистемы) должны предусматривать:
- сборку тестовой модели энергосистемы;
- проведение испытаний;
- анализ результатов испытаний.
Г.2 Сборка тестовой модели энергосистемы
Г.2.1 Общие положения
Г.2.1.1 Тестовая модель энергосистемы должна относиться к электроустановкам напряжением до 1000 В. Тестовая модель энергосистемы должна быть собрана в соответствии со схемой, приведенной на рисунке Г.1.
Г.2.1.2 Тестовая модель энергосистемы должна быть оснащена:
- АРВ и автоматическими регуляторами скорости турбин;
- устройствами, моделирующими КЗ различного вида;
- устройствами моделирования действия релейной защиты и автоматики;
- системой контроля и регистрации параметров электроэнергетического режима.
Г.2.2 Схема тестовой модели энергосистемы
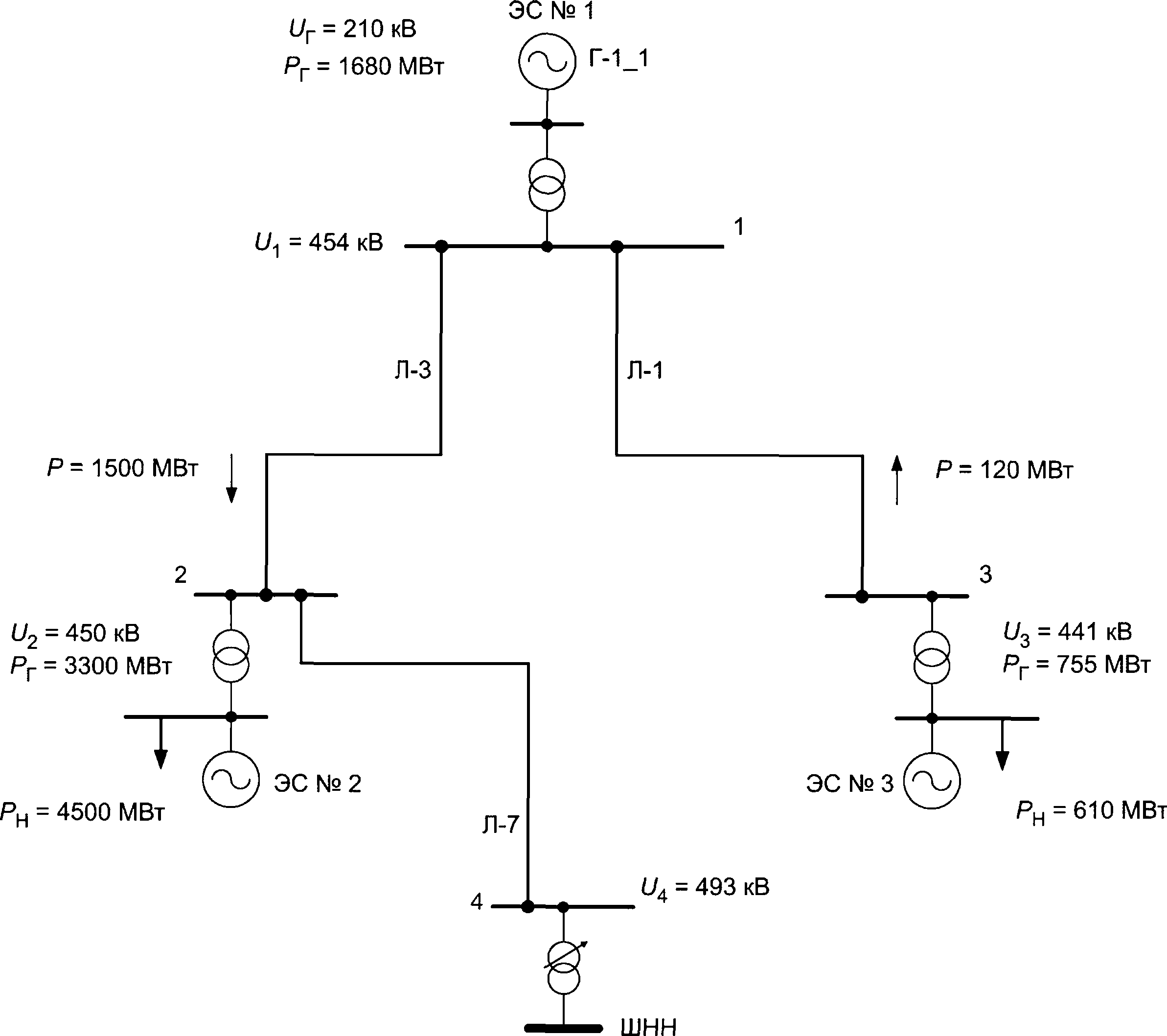
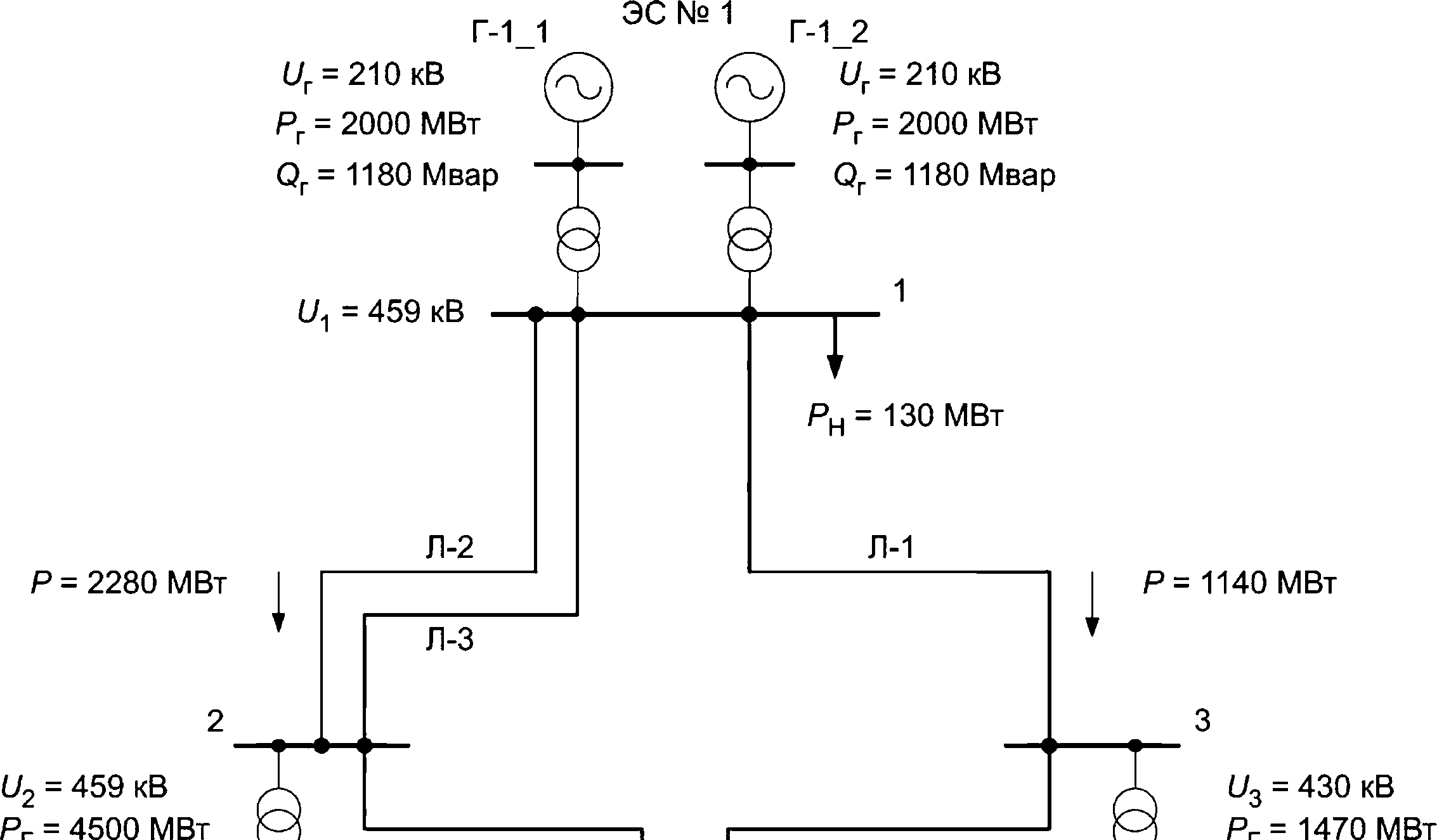
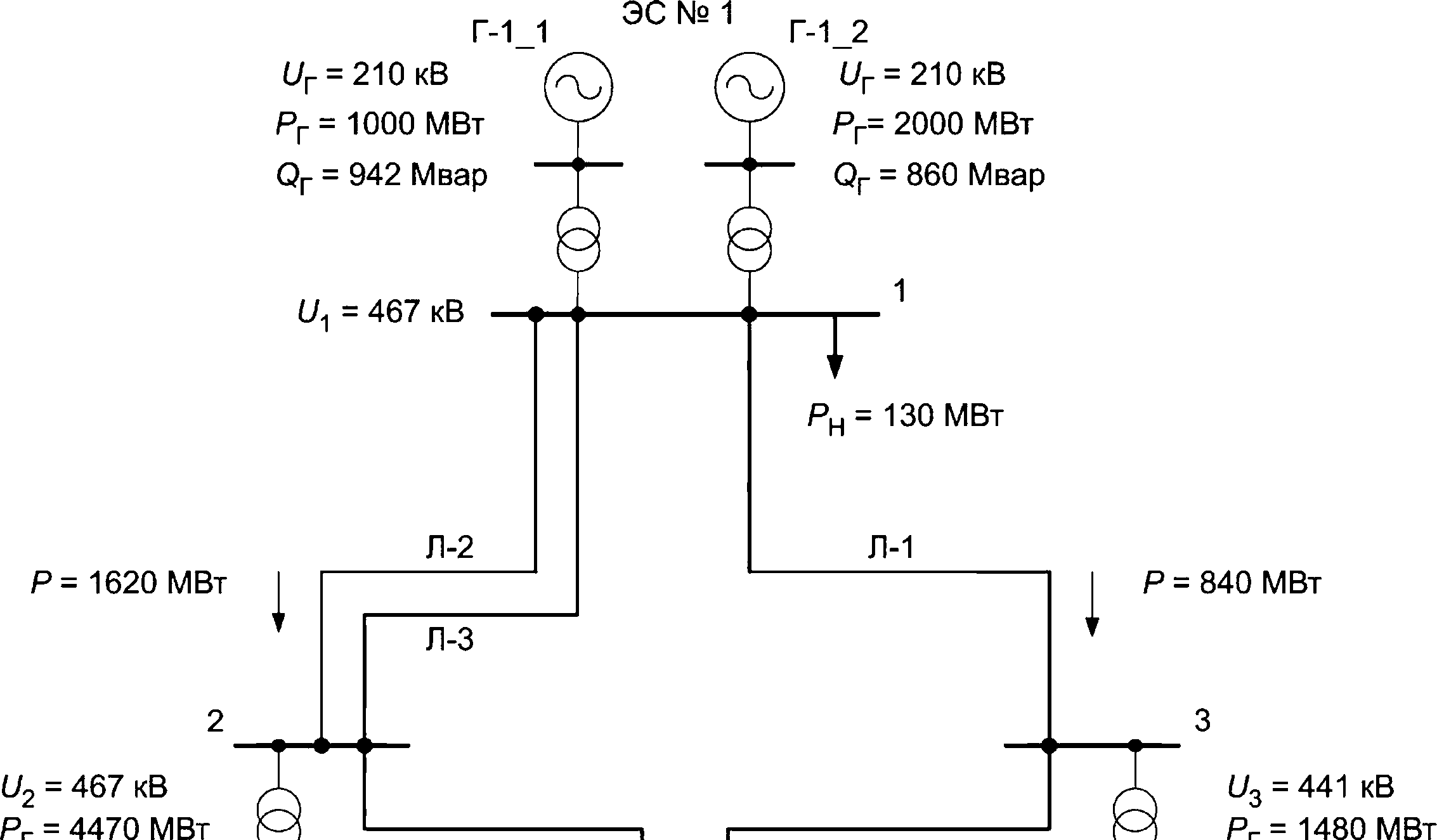
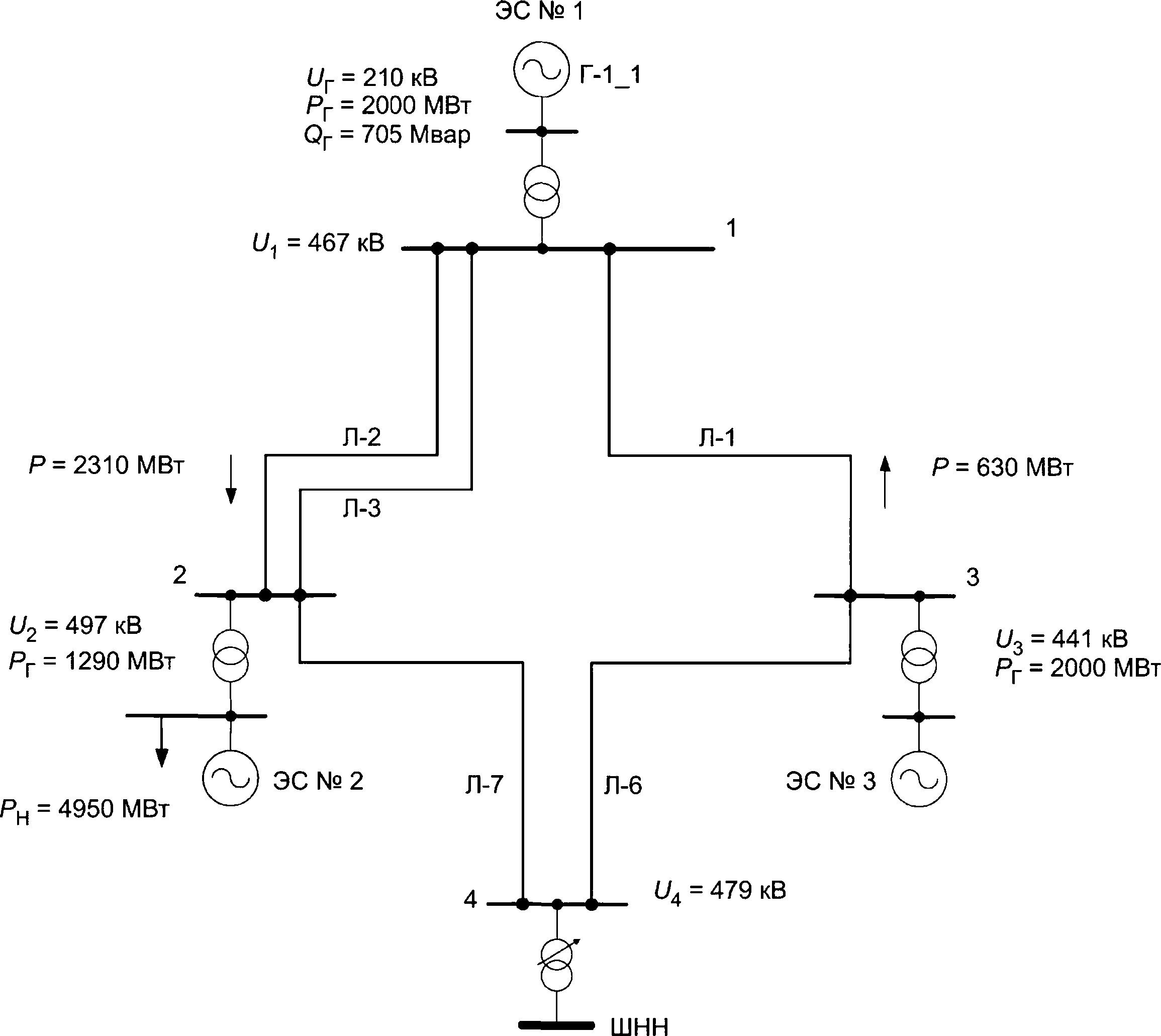
Г.2.2.1 Схема тестовой модели энергосистемы должна включать шесть синхронных генераторов с блочными трансформаторами, пять узлов нагрузки и семь ЛЭП.
Синхронные генераторы Г-1_1, Г-1_2, Г-1_3 моделируют электрическую станцию № 1, оснащенную тремя одинаковыми синхронными генераторами, работающими на шины 500 кВ, на один или два из которых устанавливают испытуемые АРВ сильного действия.
При моделировании Г-1_1, Г-1_2, Г-1_3 ЭС-1 в тестовой модели энергосистемы допустимо использовать модельные генераторы номинальной активной мощностью от 5 до 20 кВт. Номинальную активную мощность модельных генераторов Г-2, Г-3 и Г-4 выбирают в зависимости от выбранной номинальной мощности генераторов ЭС-1 в допустимом диапазоне масштабирования. Допустимый диапазон масштабирования тестовой модели энергосистемы для испытаний АРВ сильного действия (в зависимости от номинальной мощности модельных генераторов Г-1_1, Г-1_2, Г-1_3 ЭС-1) приведен в таблице Г.1.
Таблица Г.1 — Допустимый диапазон масштабирования тестовой модели энергосистемы для испытаний АРВ сильного действия
Масштаб | тр, МВтор/1 кВтмод | ти> ^мод | mz, Омор/1 Оммод |
Диапазон | 100—400 | 1000 | 2,5—10 |
Примечание — В таблице применены следующие обозначения: тр — масштаб по мощности; ти — масштаб по напряжению; mz— масштаб по сопротивлению; ор — оригинал; мод — модель. | |||
Схема тестовой модели энергосистемы должна соответствовать схеме, приведенной на рисунке Г.1.
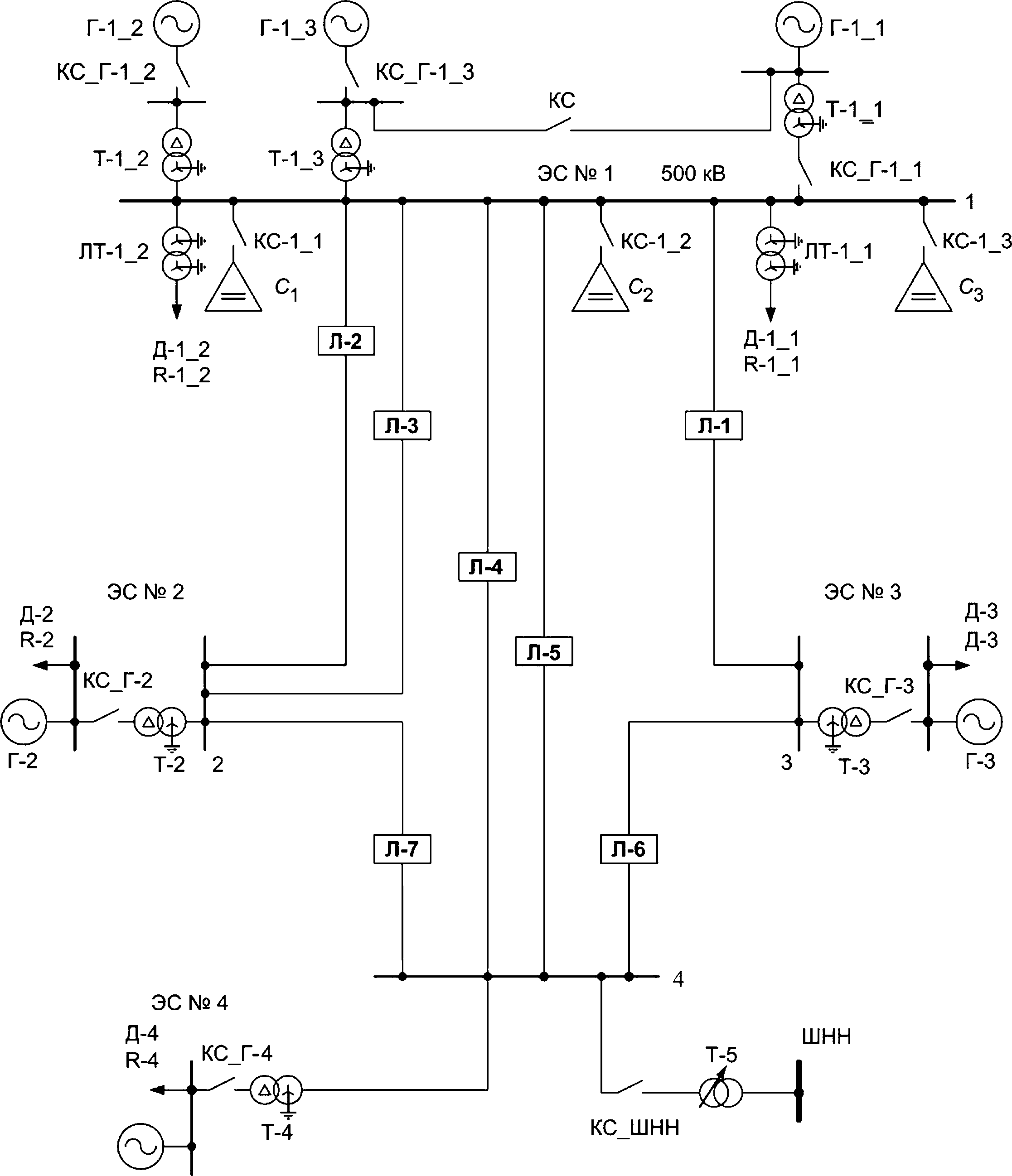
ЭС — электрическая станция; Г — генератор; Т — трансформатор; Д — асинхронный двигатель нагрузки; R — активный шунт нагрузки; Л — линия электропередачи; С — емкость; КС — контактор; ЛТ — линейный трансформатор нагрузки
Рисунок Г.1 — Схема тестовой модели энергосистемы для испытаний АРВ сильного действия
Г.2.2.2 Тестовая модель энергосистемы должна иметь возможность выполнения переключений, необходимых для проведения экспериментов, указанных в таблице Г.2.
Таблица Г.2 — Минимально необходимый объем испытаний АРВ сильного действия и алгоритма его функционирования
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
1 | Схема 1 | Режим 1 (^Г-1_1 = /ЭГном; $Г-1_1 = $Гном) | Тестовое возмущение 1 | Проверка эффективности настройки каналов стабили-зации (системного стабилизатора) | Введен |
2 | Выведен | ||||
3 | Тестовое возмущение 2 | Введен | |||
4 | Выведен | ||||
5 | Тестовое возмущение 3 | Введен | |||
6 | Выведен | ||||
7 | Режим 2 = °’5/ЭГном: $Г-1_1 = $Гном) | Тестовое возмущение 1 | Введен | ||
8 | Выведен | ||||
9 | Тестовое возмущение 2 | Введен | |||
10 | Выведен | ||||
11 | Тестовое возмущение 3 | Введен | |||
12 | Выведен | ||||
13 | Режим 3 (^Г-1_1 “ 0-5РГном-$Г-1_1 = - °>1 $Гном) | Тестовое возмущение 1 | Введен | ||
14 | Выведен | ||||
15 | Тестовое возмущение 2 | Введен | |||
16 | Выведен | ||||
17 | Тестовое возмущение 3 | Введен | |||
18 | Выведен | ||||
19 | Схема 2.1 | Режим 4 | Увеличение перетока по линии Л-1 за счет увеличения мощности Г-1_1 до нарушения устойчивости | Проверка апериодического характера нарушения статической устойчивости | Введен |
20 | Выведен | ||||
21 | Схема 2.2 | Увеличение перетока по линии Л-3 за счет увеличения мощности Г-1_1 до нарушения устойчивости | Введен | ||
22 | Выведен |
ГОСТ Р 70609—2022
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
23 | Схема 3 | Режим 5 (РГ-1_1 “ РГ-1_2 “ ^Гном) | Тестовое возмущение 1 | Проверка качества стабилизации режима и проверка отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 — испытуемый АРВ, а на Г-1 _2 — регулятор типа АРВ-СД) | На АРВ Г-1_1 и АРВ Г-1_2 введен |
24 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | ||||
25 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
26 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
27 | Тестовое возмущение 2 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | |||
28 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
29 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
30 | На АРВ Г-1_1 и АРВ Г-1_2 введен | ||||
31 | Режим 6 (РГ-1_1 = ^Гном’ ^Г-1_2 - 0>5Р[-НОМ) | Тестовое возмущение 1 | На АРВ Г-1_1 и АРВ Г-1_2 введен | ||
32 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | ||||
33 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
34 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
35 | Режим 7 (^Г-1_1 = °’5/ЭГном: ^Г-1_2 = ^Гном) | Тестовое возмущение 2 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | ||
36 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
37 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
38 | На АРВ Г-1_1 и АРВ Г-1_2 введен |
ГОСТ Р 70609—2022
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
39 | Схема 3 | Режим 8 | Отключение линии Л-2 | Проверка качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ | Введен |
40 | Выведен | ||||
41 | Однофазное КЗ вблизи шин ЭС № 1 с успешным ОАПВ линии Л-21) | Введен | |||
42 | Выведен | ||||
43 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с успешным ТАПВ линии Л-2 | Введен | |||
44 | Выведен | ||||
45 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Введен | |||
46 | Выведен | ||||
47 | Однофазное КЗ вблизи шин ЭС № 1 с неуспешным ОАПВ линии Л-2 | Введен | |||
48 | Выведен | ||||
49 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с неуспешным ТАПВ линии Л-2 | Введен | |||
50 | Выведен | ||||
51 | Отключение линии Л-2 действием УРОВ при двухфазном КЗ на землю вблизи шин ЭС № 1 с отказом фазы выключателя | Введен | |||
52 | Выведен | ||||
53 | Схема 4 | Режим 9 | Аварийное отключение нагрузки в приемной энергосистеме — отключение нагрузки на ЭС № 2 (частота в послеаварийном режиме 50,5 Гц) | Проверка корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока | Введен2) |
54 | Введен3) | ||||
55 | Выведен | ||||
56 | Режим 10 | Аварийное отключение генератора в приемной энергосистеме — отключение генератора на ЭС № 3 (частота в послеаварийном режиме 49,5 Гц) | Введен2) | ||
57 | Введен3) | ||||
58 | Выведен |
ГОСТ Р 70609—2022
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
59 | Схема 5 | Режим 11 | Аварийное отключение генератора в приемной энергосистеме — отключение генератора на ЭС № 2 (частота в послеаварийном режиме 49,5 Гц) | Введен2) | |
60 | Введен3) | ||||
61 | Выведен | ||||
62 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Введен2) | |
63 | Введен3) | ||||
64 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Проверка корректности рабо-ты функции релейной форсировки возбуждения в режи-мах, близких к предельным | Введен |
65 | Выведен | ||||
66 | Режим 12 снижение мощности ЭС № 2 до неустойчивого перехода4) | Введен | |||
67 | Выведен | ||||
68 | Схема 3 | Режим 13 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 и отключением от ПА Г-1_2 | Проверка обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА | Введен |
69 | Выведен | ||||
70 | Схема 3 | Режим 14 | Медленное увеличение напряжения Ur ЭС. Вход в зону ОМВ | Проверка корректности рабо-ты ОМВ | Введен |
71 | Медленное снижение напряжения Ur ЭС. Выход из зоны ОМВ | Введен | |||
72 | Медленное увеличение активной мощности генератора ЭС № 1 до входа в зону ОМВ | Введен | |||
73 | Скачкообразное увеличение напряжения на шинах 500 кВ ЭС № 1 (подключение емкостной нагрузки). Вход в зону ОМВ | Введен | |||
74 | Скачкообразное снижение напряжения на шинах 500 кВ ЭС № 1 (отключение емкостной нагрузки). Выход из зоны ОМВ | Введен |
ГОСТ Р 70609—2022
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
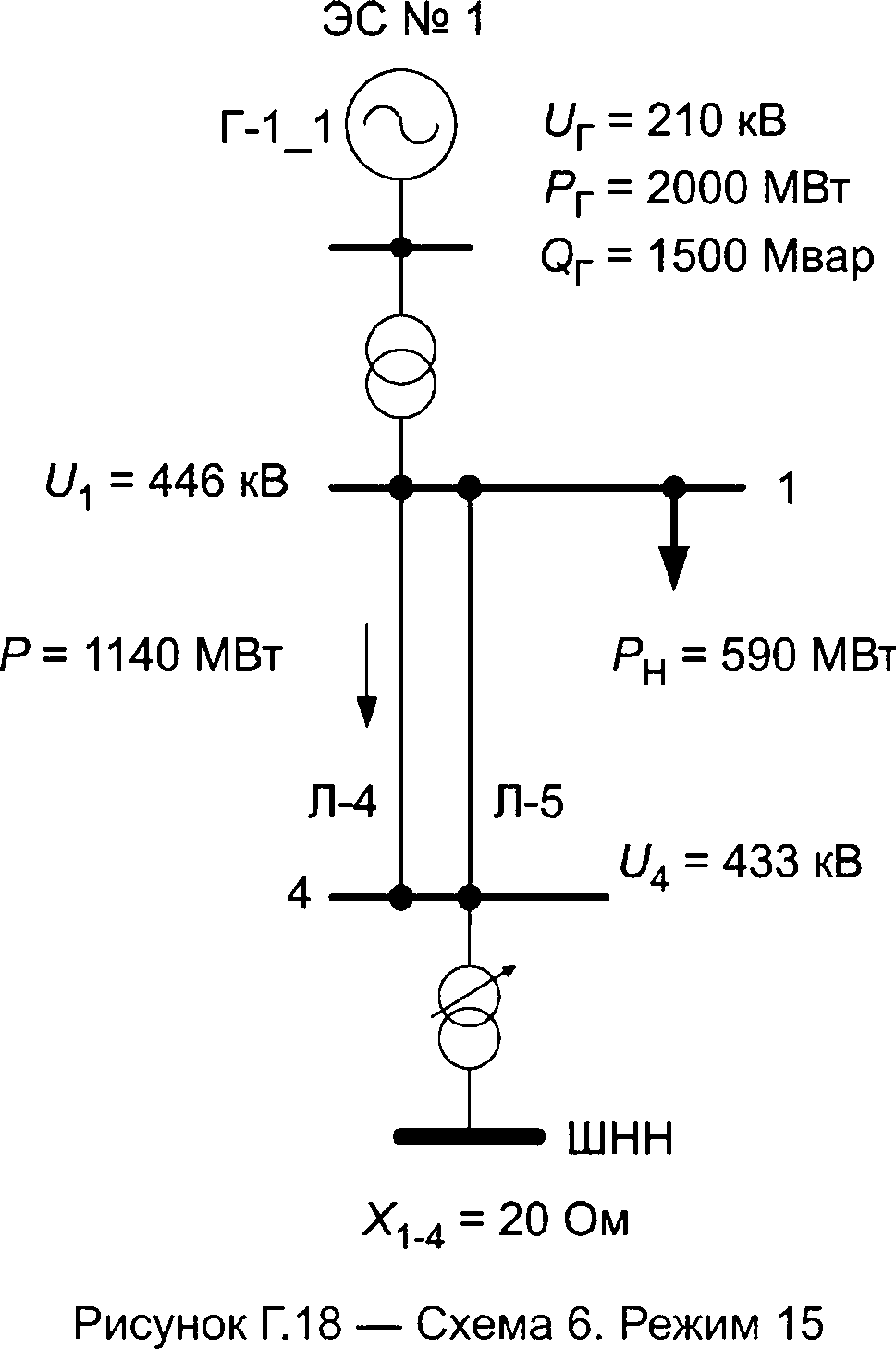
75 | Схема 6 | Режим 15 | Ступенчатое увеличение уставки АРВ сильного действия Г-1_1 по напряжению генератора5) | Проверка корректности работы ограничителя двукратного тока ротора | Введен |
76 | Двухфазное затянувшееся КЗ (длительностью 0,4 с) на землю вблизи шин ЭС № 1 | Введен | |||
77 | Серия из двух последовательных двухфазных КЗ на землю вблизи шин ЭС № 16> | Введен | |||
78 | Схема 7 | Режим 16 = РГ-1_3 = ^ном) | Тестовое возмущение 1 (на АРВ Г-1_1) | Проверка обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока | На АРВ Г-1_1 и АРВ Г-1_3 введен |
79 | Тестовое возмущение 2 | На АРВ Г-1_1 иАРВГ-1_3 введен | |||
80 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
81 | Тестовое возмущение 3 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
82 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
83 | Отключение Г-1_3 | На АРВ Г-1_1 введен | |||
84 | Режим 17 (^Г-1_1 = ^Гном; ^Г-1_3 = °’5/ЭГном) | Тестовое возмущение 1 (на АРВ Г-1_1) | На АРВ Г-1_1 и АРВ Г-1_3 введен | ||
85 | Тестовое возмущение 2 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
86 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
87 | Тестовое возмущение 3 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
88 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен |
ГОСТ Р 70609—2022
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
89 | Схема 6 | Режим 15 | Трехфазное затянувшееся КЗ (длительностью 0,35 с) на землю вблизи шин ЭС № 1 | Проверка корректности работы ограничителя напряжения ротора бесщеточного возбудителя | Введен |
90 | Трехфазное затянувшееся КЗ (длительностью 0,35 с) на землю вблизи шин ЭС № 1 | Проверка корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя | Введен | ||
91 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Проверка корректности расчета тока ротора по диаграмме Потье7) | Введен |
| |||||
ГОСТ Р 70609—2022
Г.2.2.3 Диапазон изменения нагрузки потребления, подключенной к шинам электрических станций № 1—3 и эквивалентной энергосистемы (генератор Г-4), должен обеспечивать возможность создания перетоков активной мощности по ветвям физической модели не менее указанных на рисунках Г.З—Г.20.
Г.2.2.4 Параметры ЛЭП, синхронных генераторов, трансформаторов, нагрузок и емкостей тестовой модели энергосистемы приведены в таблицах Г.З—Г.7.
Таблица Г.З — Параметры ЛЭП, приведенные к напряжению 500 кВ
Номера узлов примыкания | Обозначение линии | Хр Ом | Хо, Ом | Rv Ом | RQ, Ом |
1—3 | Л-1 | 100 | 370 | 3,6 | 52,6 |
1—2 | Л-2 Л-3 | 50 100 | 185 370 | 2,6 6,8 | 26,6 55,8 |
1^ | Л-4 Л-5 | 25 100 | 91 370 | 1,2 5,2 | 13,7 54,2 |
3—4 | Л-6 | 50 | 185 | 2,5 | 26,5 |
2—4 | Л-7 | 50 | 185 | 4,5 | 28,5 |
Таблица Г.4 — Параметры синхронных генераторов
Номер генератора | Shom- МВА | ЧнОМ’ кВ | COS ф | РеактивностиЛ | Tdo’ с | Ту,с | |||
Xd, о.е. | Xq, о.е. | х;, о.е. | Xd", о.е. | ||||||
1_1 | 2500 | 210 | 0,8 | 1,88 | 1,65 | 0,184 | 0,098 | 7 | 7 |
1_2 | 2500 | 210 | 0,8 | 1,63 | 1,01 | 0,186 | 0,084 | 7 | 7 |
1_3 | 2500 | 210 | 0,8 | 1,85 | 1,78 | 0,204 | 0,093 | 7 | 7 |
2 | 9000 | 230 | 0,8 | 1,05 | 0,9 | 0,287 | 0,09 | 7 | 10 |
3 | 2500 | 230 | 0,8 | 1,33 | 1,18 | 0,143 | 0,079 | 7 | 9 |
4 | 125 000 | 230 | 0,8 | 10,37 | 6,68 | 2,838 | 0,89 | 7 | 82) |
5 | ШНН | ||||||||
| |||||||||
Таблица Г.5 — Параметры трансформаторов
Наименование | $Т_ном- МВА | кВ | Чг кВ | Рх.х- МВт | Ркз, МВт | "к- % | 'х.х- % |
Т-1_1 | 2500 | 500 | 212,5 | 52,5 | 22,5 | 15,9 | 2,896 |
Т-1_2 | 2500 | 500 | 211,5 | 70,5 | 26,8 | 15,163 | 3,376 |
Т-1_3 | 2500 | 500 | 213,3 | 30,97 | 18,33 | 16,063 | 1,56 |
Т-2 | 9000 | 500 | 220,0 | 108,5 | 6,8 | 18,405 | 1,6356 |
Т-3 | 2500 | 500 | 233,5 | 84,0 | 57,0 | 12,925 | 4,552 |
Т-4 | 125000 | 500 | 233,0 | 110,7 | 2941 | 166,9 | 0,114 |
ЛТ-1_1 | 1600 | 500 | 234 | 75,0 | 19,8 | 2,13 | 9,48 |
ЛТ-1_2 | 1600 | 500 | 230 | 75,0 | 17,8 | 1,87 | 9,84 |
Примечаниек таблицам Г.З—Г.5 — В данных таблицах применены следующие обозначения:
— индуктивное сопротивление прямой последовательности;
Хо — индуктивное сопротивление нулевой последовательности;
/?1 — активное сопротивление прямой последовательности;
Ro — активное сопротивление нулевой последовательности;
SH0M — номинальная полная мощность генератора;
L/H0M — номинальное напряжение генератора;
Xd— продольное синхронное индуктивное сопротивление;
Xq — поперечное синхронное индуктивное сопротивление;
Xd — продольное переходное индуктивное сопротивление;
Xd" — продольное сверхпереходное индуктивное сопротивление;
TdQ — постоянная времени обмотки возбуждения при разомкнутой статорной обмотке;
Tj— механическая инерционная постоянная агрегата (генератора и турбины);
cos (р — коэффициент мощности;
UB — номинальное напряжение на стороне высокого напряжения трансформатора;
UH — номинальное напряжение на стороне низкого напряжения трансформатора;
ST ном — номинальная полная мощность трансформатора;
Рх х — потери холостого хода трансформатора;
Ркз — потери КЗ трансформатора;
ик — напряжение КЗ трансформатора, % от
/х х — ток холостого хода трансформатора, % от /ном.
Таблица Г.6 — Параметры нагрузок
Номер узла схемы | Номер нагрузки | Промышленная нагрузка (асинхронный двигатель) | Бытовая нагрузка (активный шунт) |
Р , МВт ном* | Р О, МВт | ||
1 | Д-1_1, R-1_1 | 1120 | 420 |
Д-1_2, R-1_2 | 680 | 220 | |
2 | Д-2, R-2 | 2800 | 2650 |
3 | Д-З, R-3 | 1800 | 770 |
4 | Д-4, R-4 | 5600 | 3030 |
1) Величина активной мощности шунта при напряжении 230 кВ. | |||
Таблица Г.7 — Параметры емкостей
Обозначение | Чном’ К$ | Ош, Мвар |
Ci | 500 | 188 |
с2 | 500 | 966 |
сз | 500 | 984 |
Г.2.3 СВ, АРВ и автоматические регуляторы скорости турбин
Г.2.3.1 Синхронные генераторы Г-1_1, Г-1_2, Г-1_3 должны быть оснащены быстродействующими тиристорными или бесщеточными (Е-1_1 для Г-1_1 и Е-1_3 для Г-1_3) СВ и АРВ сильного действия.
В зависимости от проводимых в рамках испытаний экспериментов АРВ одного или двух из генераторов Г-1_1, Г-1_3 должны заменяться АРВ сильного действия, в отношении которых проводят испытания. Остальные синхронные генераторы должны быть оснащены тиристорными СВ с регуляторами пропорционального действия.
Г.2.3.2 Настройка всех АРВ, которыми оснащены синхронные генераторы тестовой модели (кроме АРВ, в отношении которых проводятся испытания), должна быть выполнена в соответствии с параметрами, приведенными в таблице Г.8.
Для формирования закона управления АРВ сильного действия (кроме АРВ, в отношении которых проводятся испытания) должны использоваться постоянные времени, приведенные в таблице Г.9.
Таблица Г.8 — Параметры настройки АРВ синхронных генераторов тестовой модели
Номер генератора | Тип СВ | Тип АРВ | Коэффициенты | ^СВ’ с | ||||
е.в.н./ е.н.с. | /<1 у, е.в.н./ е.н.с./с | KMf’ е.в.н./ е.т.р. 1>/с | к, е.в.н./Гц | Ки, е.в.н./ Гц/с | ||||
1_2 | Тиристорная | АРВ-СД | 50 | 4,7 | 0,7 | 2,0 | 3,1 | 0,04 |
2 | Тиристорная | АРВ-П | 1 | — | — | — | — | 0,04 |
3 | Тиристорная | АРВ-П | 25 | — | — | — | — | 0,04 |
4 | Тиристорная | АРВ-П | 5 | — | — | — | — | 0,04 |
Примечание — В настоящей таблице применены следующие обозначения:
| ||||||||
Таблица Г.9 — Параметры АРВ синхронных генераторов тестовой модели
Тип АРВ | ти> мкс | Ли’ мс | Tf.3, с3 | Tf-2’ °2 | ТЛ1, с | Лг-з- с3 | T1f-2’ °2 | T1f-V мс | 7”j ip м с |
АРВ-СД/ АРВ-П | 159,7 | 42,11 | 775,0 • 10~6 | 46,42 • 10-3 | 0,8351 | 22,40 • 10~6 | 2,371 • 10-3 | 87,89 | 29,72 |
Примечание — В настоящей таблице применены следующие обозначения:
| |||||||||
Г.2.3.3 Величина входного переменного напряжения независимого источника трехфазного напряжения тиристорных преобразователей статических СВ должна обеспечивать напряжение возбуждения генератора, равное 2,0Uf ном при мгновенном изменении угла управления тиристорами до 0°—5° в номинальном режиме работы генератора, где Uf ном — номинальное напряжение возбуждения генератора.
Г.2.3.4 Параметры бесщеточных возбудителей генераторов Г-1_1 и Г-1_3 (Е-1_1 для Г-1_1 и Е-1_3 для Г-1_3) приведены в таблице Г. 10.
Таблица Г. 10 — Параметры бесщеточных возбудителей
Номер генератора (возбудителя) | Shom- МВТ | Чюм- кВ | Реактивности1^ | Td0’C | ||||
Xd, о.е. | Xq, о.е. | Xd', о.е. | Xd", о.е. | Xq, о.е. | ||||
1_1 (Е-1_1) | 257,7 | 74,3 | 0,45 | 0,4 | 0,143 | 0,084 | 0,106 | 0,94 |
1_3 (Е-1_3) | 267,5 | 72,5 | 0,46 | 0,44 | 0,154 | 0,09 | 0,103 | 0,95 |
1) Относительные величины реактивностей приведены к номинальной полной мощности и номинальному напряжению. | ||||||||
Г.2.3.5 В качестве источника питания тиристорного преобразователя моделей БСВ синхронных генераторов Г-1_1, Г-1_3 следует использовать трехфазный источник напряжения. Выход тиристорного преобразователя должен быть подключен к обмотке возбуждения возбудителя. В качестве источника питания модели диодного моста необходимо использовать напряжение статора возбудителя. Выход диодного моста должен быть подключен к обмотке возбуждения синхронного генератора. Принципиальная схема моделей БСВ приведена на рисунке Г.2.
Г.2.3.6 Величина входного переменного напряжения моделей тиристорных преобразователей БСВ должна обеспечивать напряжение возбуждения возбудителя, равное 7,4L/ff ном при мгновенном изменении угла управления тиристорами до 0°—5° в номинальном режиме работы генераторов (Г-1_1 либо Г-1_3 соответственно), где Uff ном — напряжение возбуждения возбудителя, соответствующее номинальному режиму работы основного генератора (Г-1_1 и Г-1_3 соответственно).
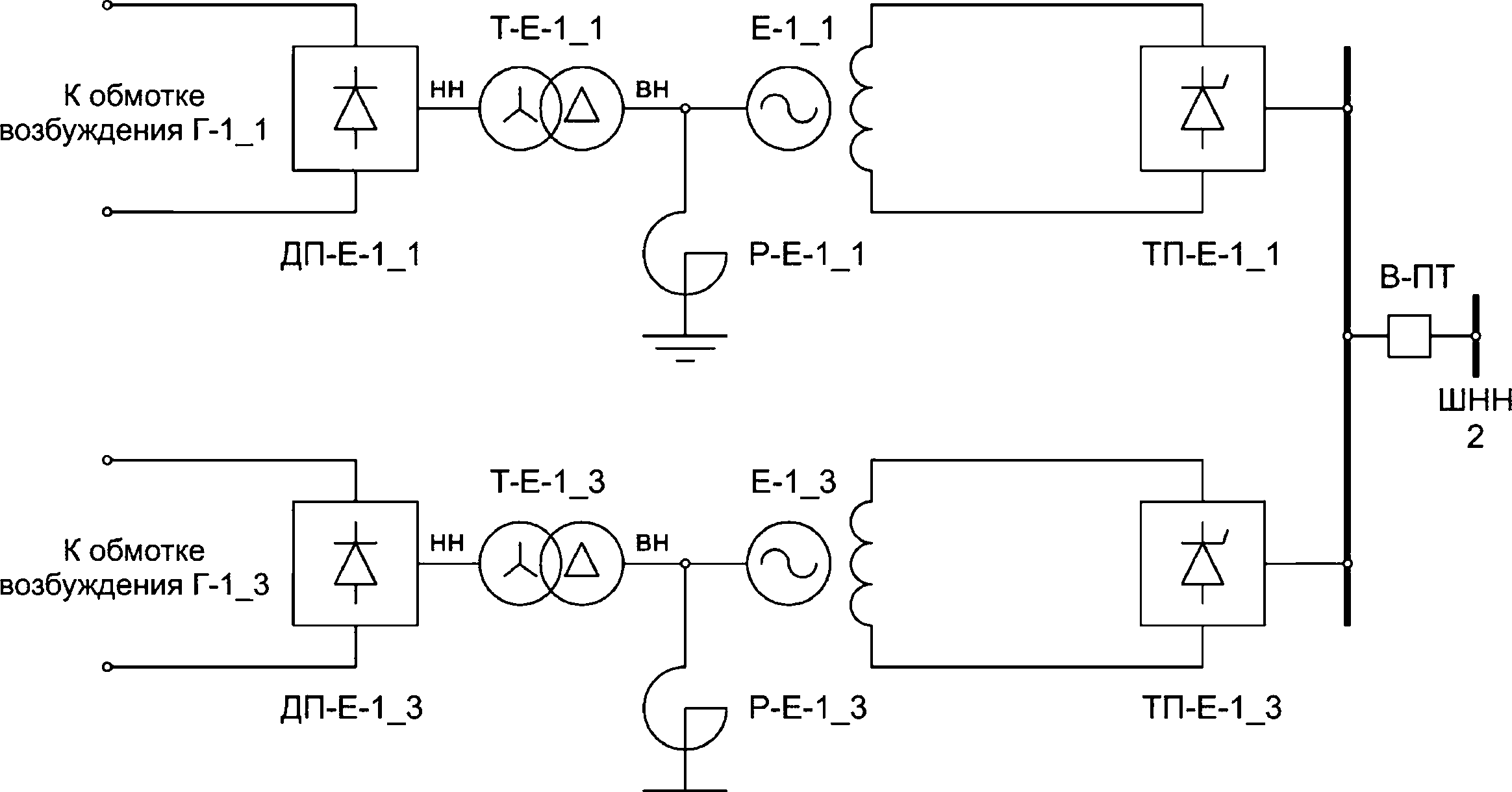
ТП-Е-1_1 и ТП-Е-1_3 — тиристорные преобразователи; ДП-Е-1_1 и ДП-Е-1_3 — диодные преобразователи;
Р-Е-1_1 и Р-Е-1_3 — реакторы; Т-Е-1_1 и Т-Е-1_3 — согласующие трансформаторы
Рисунок Г.2 — Схема моделей БСВ
Примечания
1 Параметры Р-Е-1_1:
- индуктивность реактора 0,06358 Гн;
- активное сопротивление 1 Ом.
2 Параметры Р-Е-1_3:
- индуктивность реактора 0,06224 Гн;
- активное сопротивление 0,8175 Ом.
3 Параметры Т-Е-1_1 и Т-Е-1_3:
- напряжение высшей стороны 220 кВ;
- напряжение низшей стороны 28,23 кВ;
- номинальная полная мощность 228 МВА;
- индуктивное сопротивление прямой последовательности трансформатора 0,01 о.е.;
- потери холостого хода трансформатора 0,001 о.е.;
- реактивные токи холостого хода 0,1 %.
Г .2.3.7 Все электростанции тестовой модели энергосистемы должны быть оснащены устройствами, моделирующими автоматические регуляторы скорости турбины со статизмом регулирования 5 %.
Г .2.4 Система контроля и регистрации параметров электроэнергетического режима
Г .2.4.1 Тестовая модель энергосистемы должна быть оснащена системой контроля и регистрации параметров электроэнергетического режима.
Г .2.4.2 Система контроля параметров электроэнергетического режима должна обеспечивать измерение и визуализацию напряжений во всех узлах и перетоков активной мощности во всех ветвях тестовой модели энергосистемы.
Г .2.4.3 Система регистрации параметров электроэнергетического режима должна обеспечивать одновременную синхронизированную по времени регистрацию следующих параметров электроэнергетического режима:
- перетоки активной мощности по ЛЭП Л-1 [R^], Л-2 и Л-3 [P-^L Л-4 и Л-5
- активная и реактивная мощности генераторов Г-1_1 [Рр^ 1], Г-1_2 [Рр^ 2, Q|--1 2! и Г-1_3 [Рр^ 3, $г-1_з1;
- напряжения статора генераторов Г-1_1 [С/г_1 1], Г-1_2 [Ц-^ 2], Г-1_3 [С/р^ 3];
- напряжения возбуждения генераторов Г-1_1 [Ltfp.-i -ф Г-1_2 2], Г-1_3 [(Jfr_1 3];
- токи ротора генераторов Г-1_1 [If^ 1], Г-1_2 [If^ 2], Г-1_3 [/fp^ 3J;
- напряжения возбуждения возбудителей Е-1_1 J и Е-1_3 3];
- токи возбуждения возбудителей Е-1_1 [lfB^ J и Е-1_3 [lfB^ 3];
- напряжения фаз А [Ца], В [U1b] и С [U1c] на шинах 500 кВ узла 1;
- частота электрического тока в узле 1 [df[,
- относительный угол между ЭДС генератора Г-1_1 (Г-1_3) и напряжением узла 4 [61_4];
- относительный угол между ЭДС генератора Г-3 и ЭДС генератора Г-1_1 (Г-1_3) [53_1];
- относительный угол между ЭДС генератора Г-2 и ЭДС генератора Г-1_1 (Г-1_3) [62_1];
- ток ротора генератора Г-1_1, рассчитанный с использованием диаграммы Потье (сигнал подается от испытуемого АРВ сильного действия) [/^Потье]-
Г.2.4.4 Система регистрации параметров электроэнергетического режима должна обеспечивать:
- измерение фиксируемых параметров электроэнергетического режима с дискретностью не более 1 мс;
- запись фиксируемых параметров электроэнергетического режима с дискретностью не более 20 мс;
- запись фиксируемых параметров электроэнергетического режима в течение не менее 180 с.
Г.2.5 Подключение АРВ сильного действия к физической модели
Подключение АРВ сильного действия, в отношении которого проводят испытания, к физической модели следует выполнять в соответствии с документацией изготовителя.
Подключение должно обеспечить адекватное функционирование АРВ сильного действия при выполнении всех экспериментов программы испытаний.
Г.З Проведение испытаний
Г.3.1 Схемно-режимные условия проведения испытаний
Г.3.1.1 Испытания необходимо проводить для схемно-режимных условий, указанных на рисунках Г.З—Г.20.
Г.3.1.2 Испытания АРВ сильного действия выполняют посредством моделирования следующих возмущений: а) тестовые возмущения:
- ступенчатое изменение уставки по напряжению испытуемого АРВ сильного действия на плюс 5 % номинального значения (тестовое возмущение 1);
- однофазное КЗ (длительностью 0,04 с) на шинах электрической станции № 1 (тестовое возмущение 2);
- ступенчатое изменение напряжения на шинах электрической станции № 1 посредством подключения емкости С2 (С1 в экспериментах 17 и 18) к шинам электрической станции № 1 (тестовое возмущение 3);
б) нормативные возмущения в соответствии с требованиями [3] со следующими параметрами:
- длительность КЗ — 0,12 с;
- длительность бестоковой паузы ОАПВ — 1 с;
- длительность бестоковой паузы ТАПВ — 2 с;
- время отключения фазы действием УРОВ — 0,35 с;
- запаздывание на ввод управляющего воздействия от ПА — 0,4 с с момента возникновения КЗ.
* В квадратных скобках приведены обозначения параметров электроэнергетических режимов, применяемых на рисунках Г.20—Г.41.
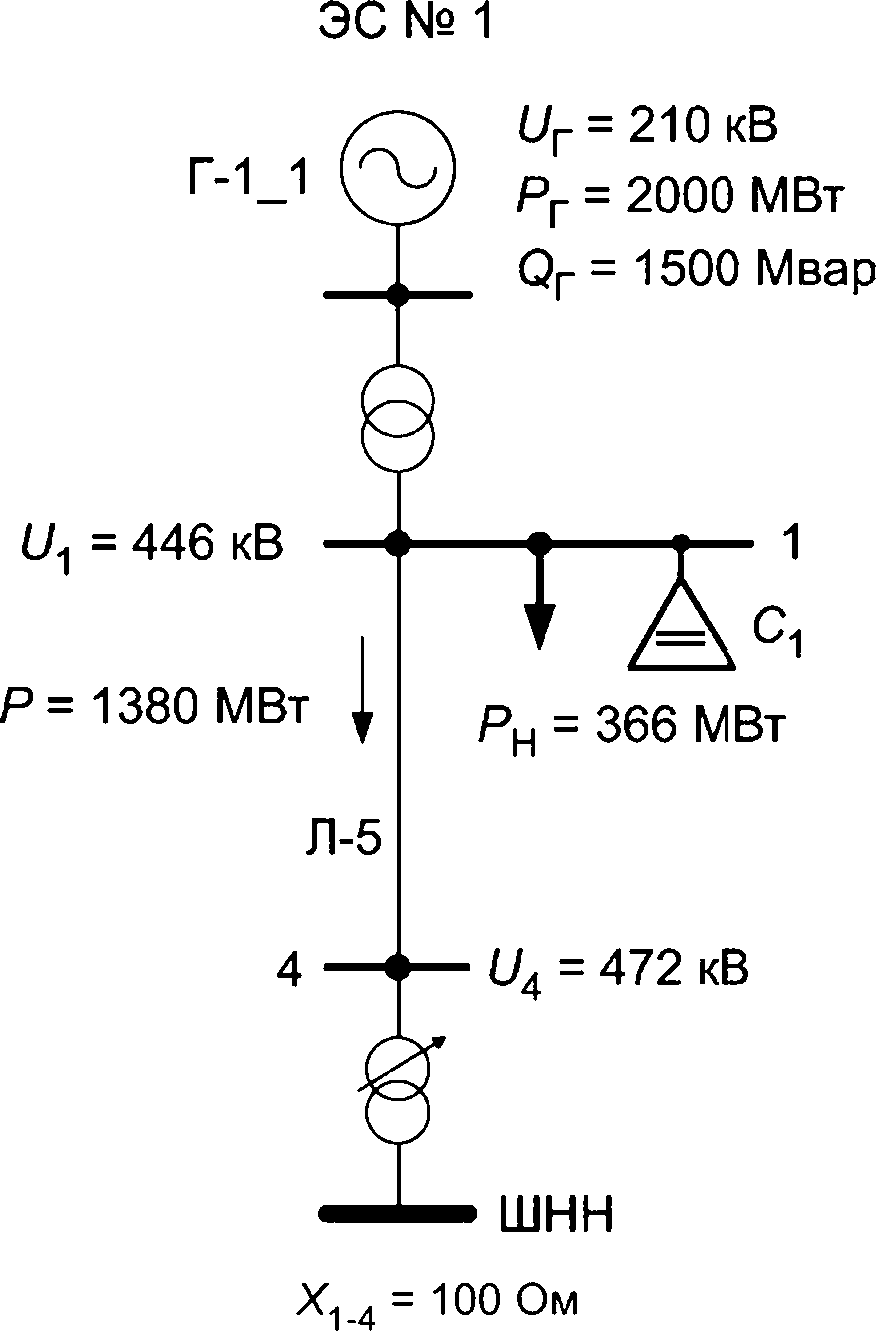
Рисунок Г.З — Схема 1. Режим 1
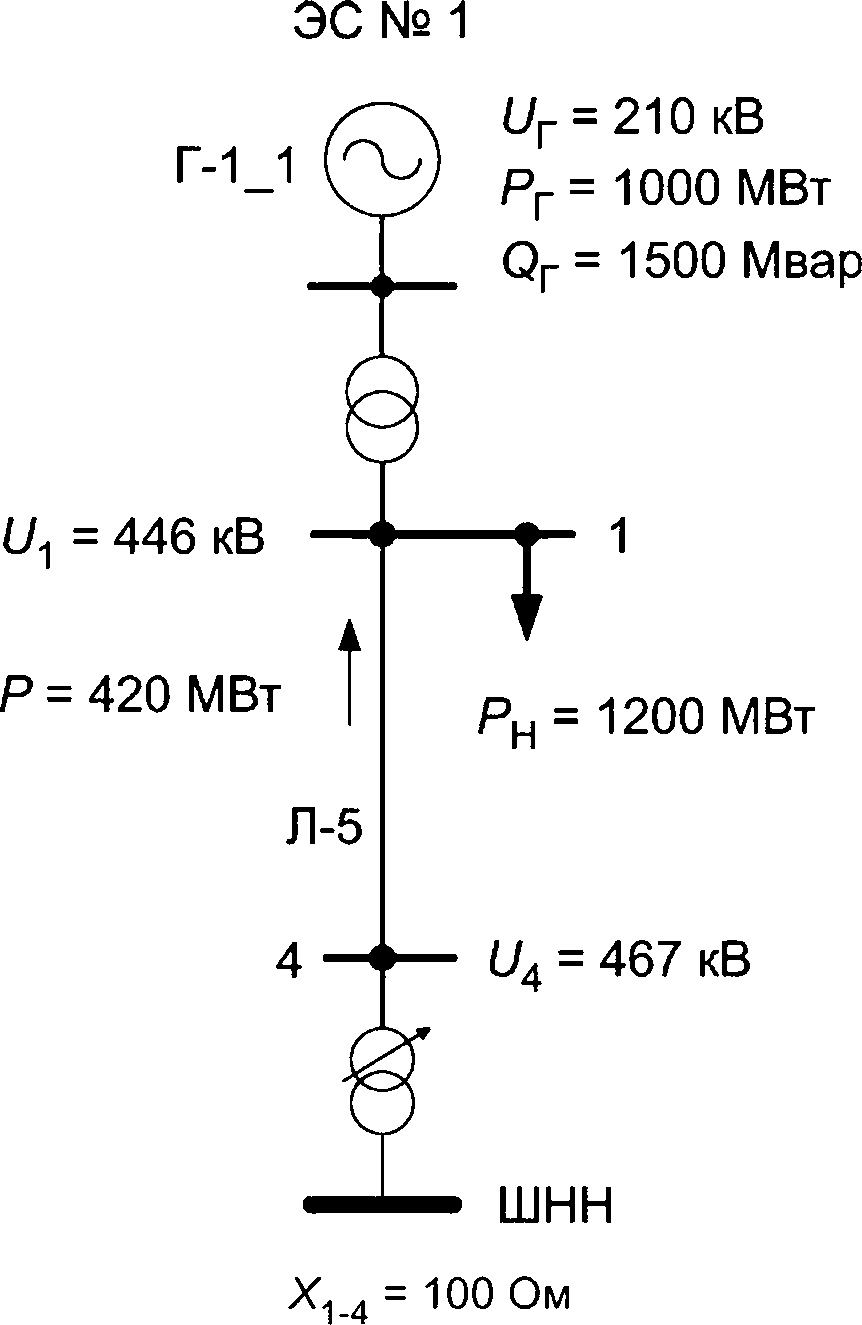
Рисунок Г.4 — Схема 1. Режим 2
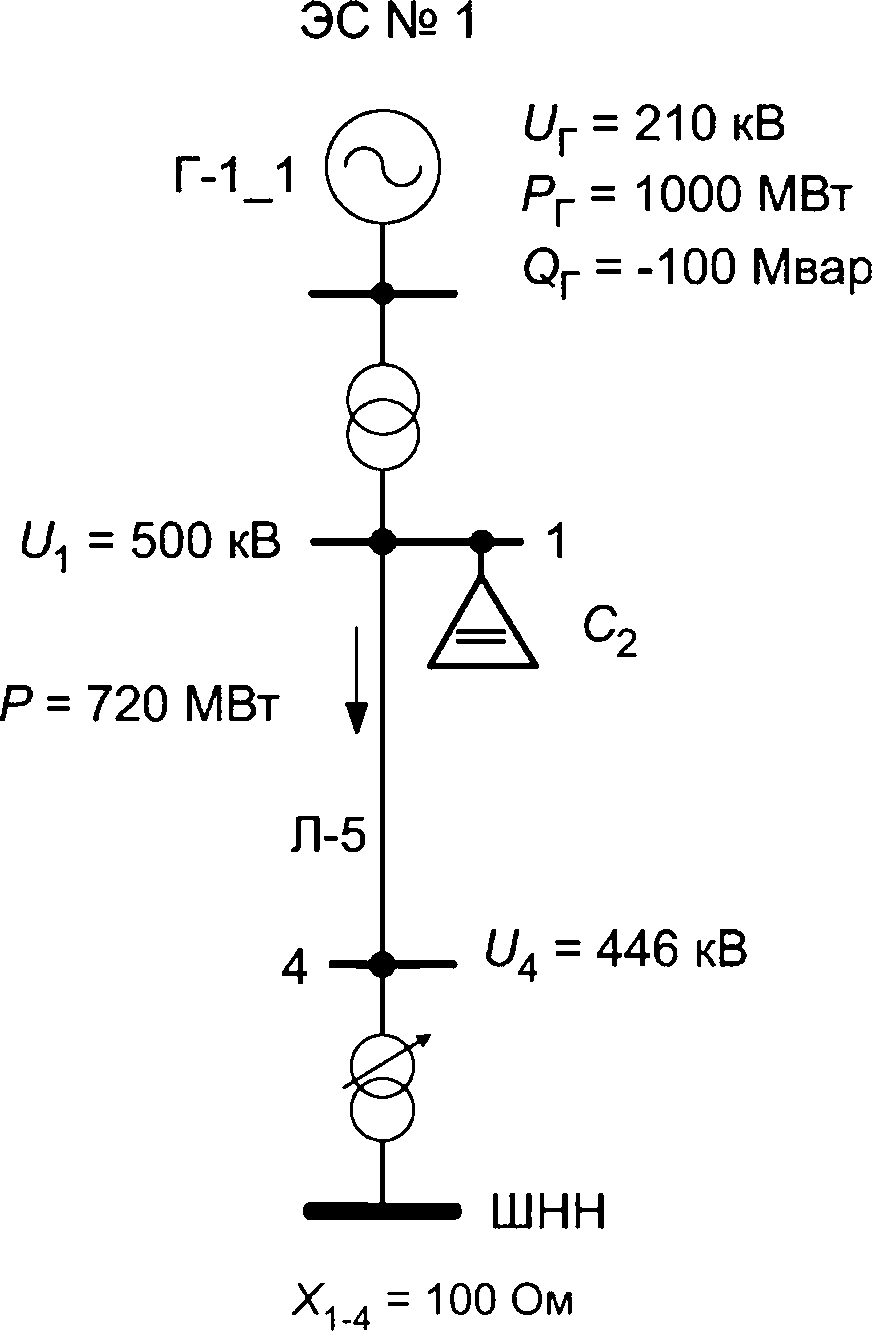
Рисунок Г.5 — Схема 1. Режим 3
ЭС № 1
XV2 = 100 Ом
Xi-3 =100 Ом
Х3_д = 50 Ом
Рисунок Г.6 — Схема 2.1. Режим 4
Х^2 = 100 Ом
XV3 =100 Ом
Х2^4 = 50 Ом
Рисунок Г.7 — Схема 2.2. Режим 4
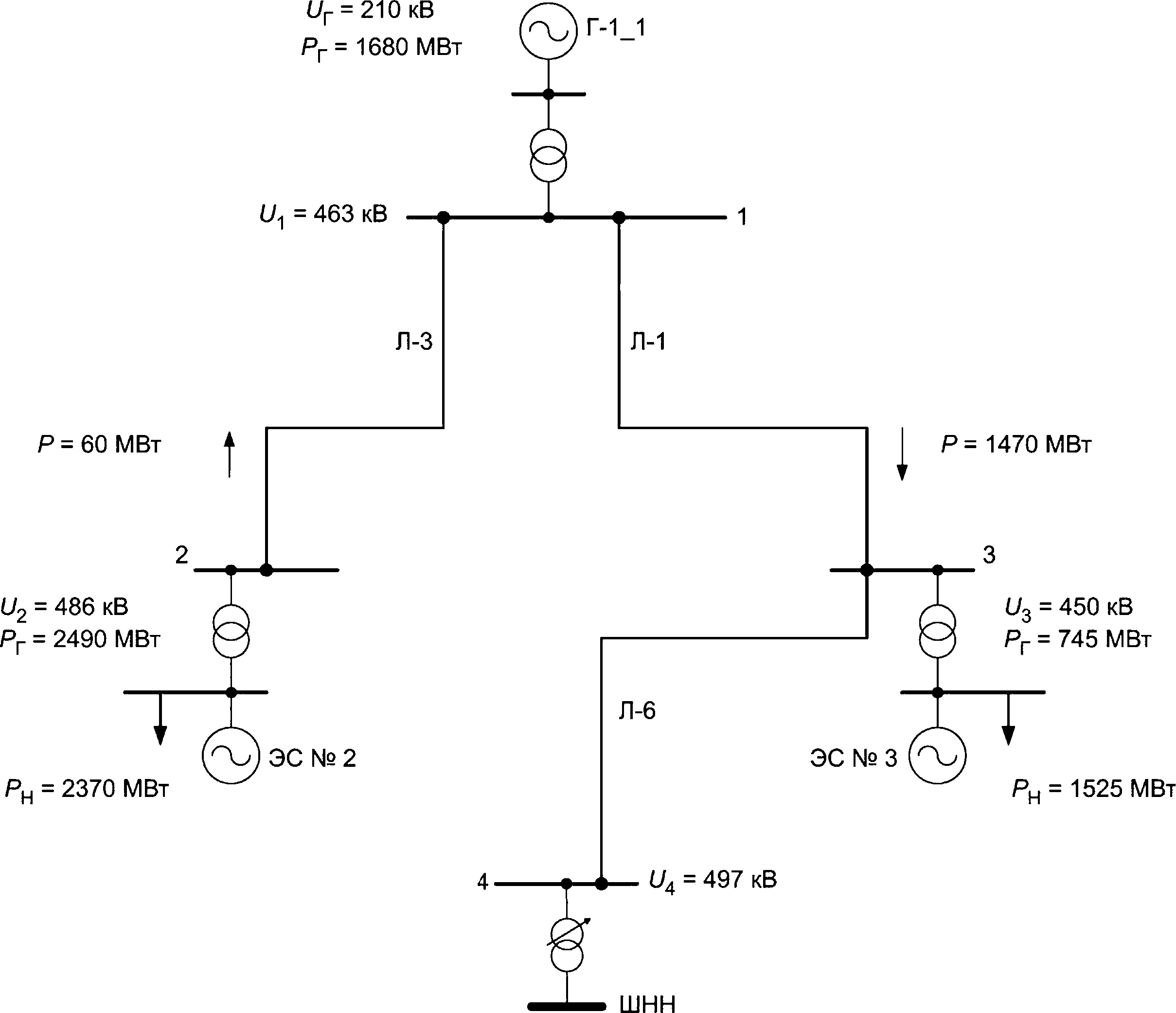
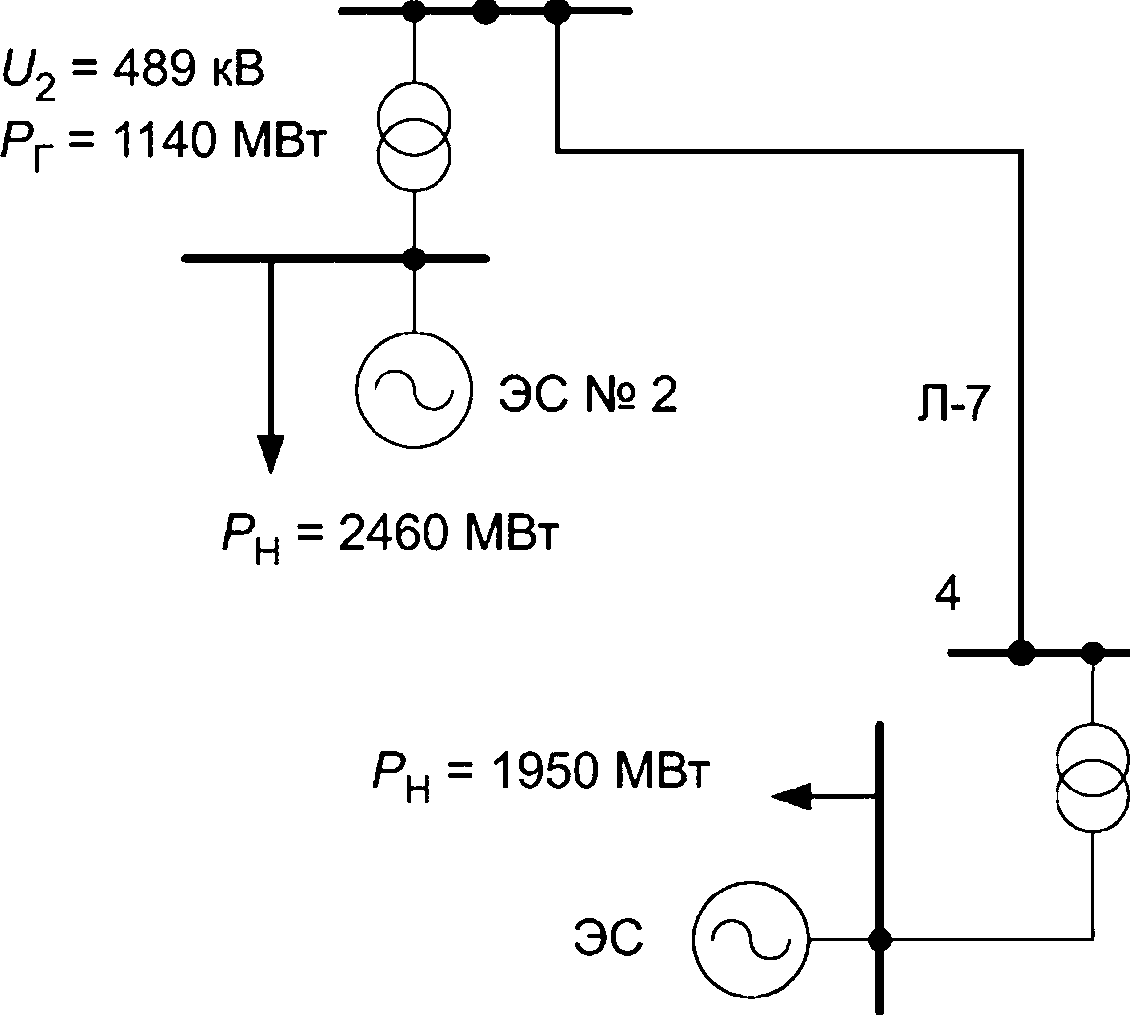
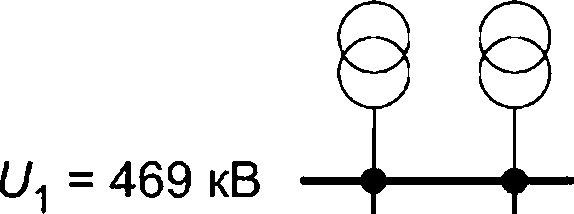
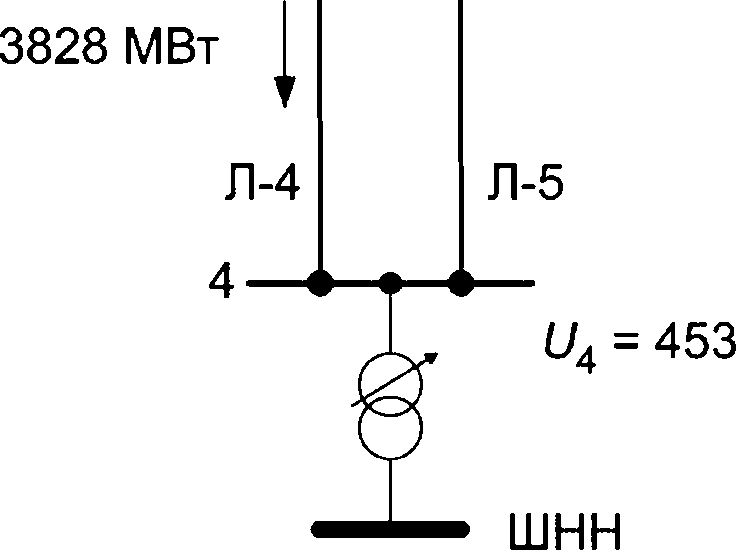
. 1 --------- * л ЭС № 2 Рн = 4500 МВт | чу ■ । ... ------ Л Л-7 Л-6 ЭС№3 Ы Рн = 1470 МВт 4 1 » 1 U4 = 459 кВ 1 шнн Х12 = 33 Ом XV3 = 100 Ом ^2-4 ~ ^3-4 = 50 Ом Рисунок Г.8 — Схема 3. Режим 5 |
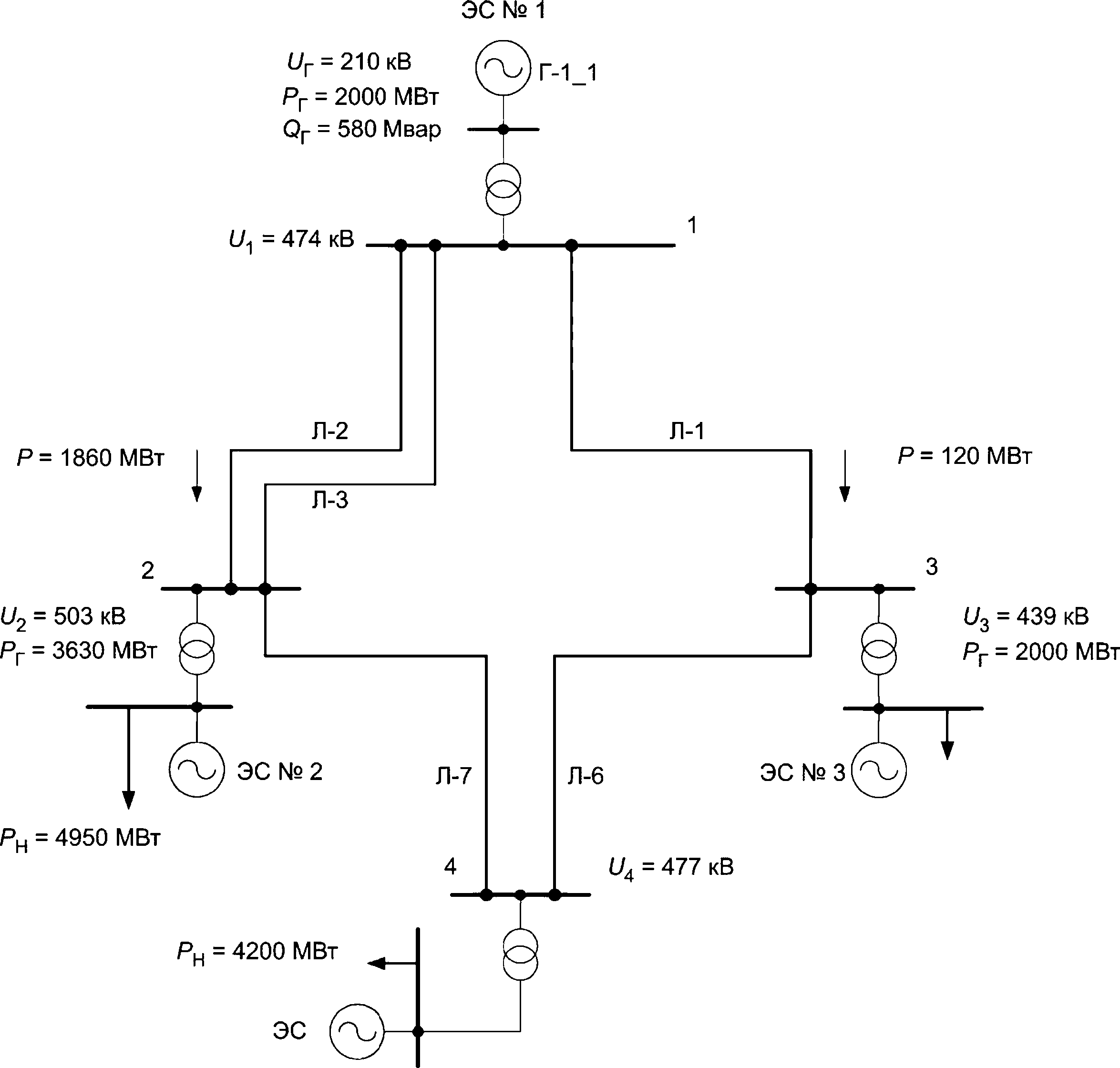
Г-1 1 ЭС № 1 Г1 2
Ц- = 210кВ
Рг = 2000 МВт
Qr = 890 Мвар
U1 = 467 кВ
Ц- = 210 кВ Рг= 1000 МВт Qr = 950 Мвар
Рн = 130 МВт
Л-2
Р= 1620 МВт
Л-3
U2 = 467 кВ
Рг = 4470 МВт
Рн = 4470 МВт
ЭС №2
Л-7
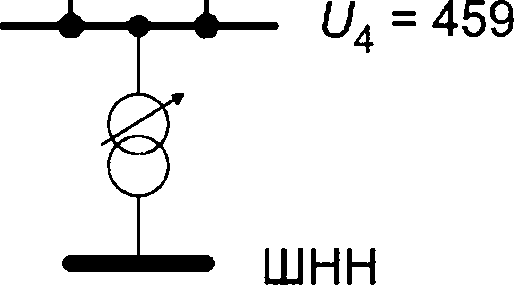
XV2 = 33 Ом
Х^з = 100 Ом
Х2_4 = Х3.4 = 50 Ом
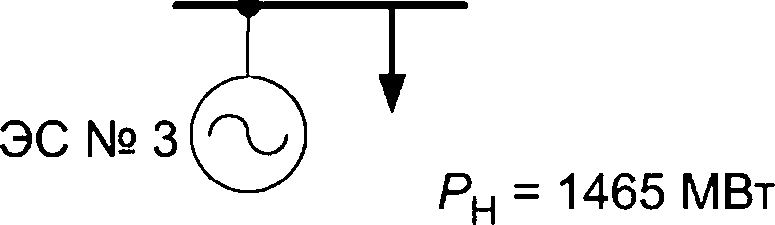
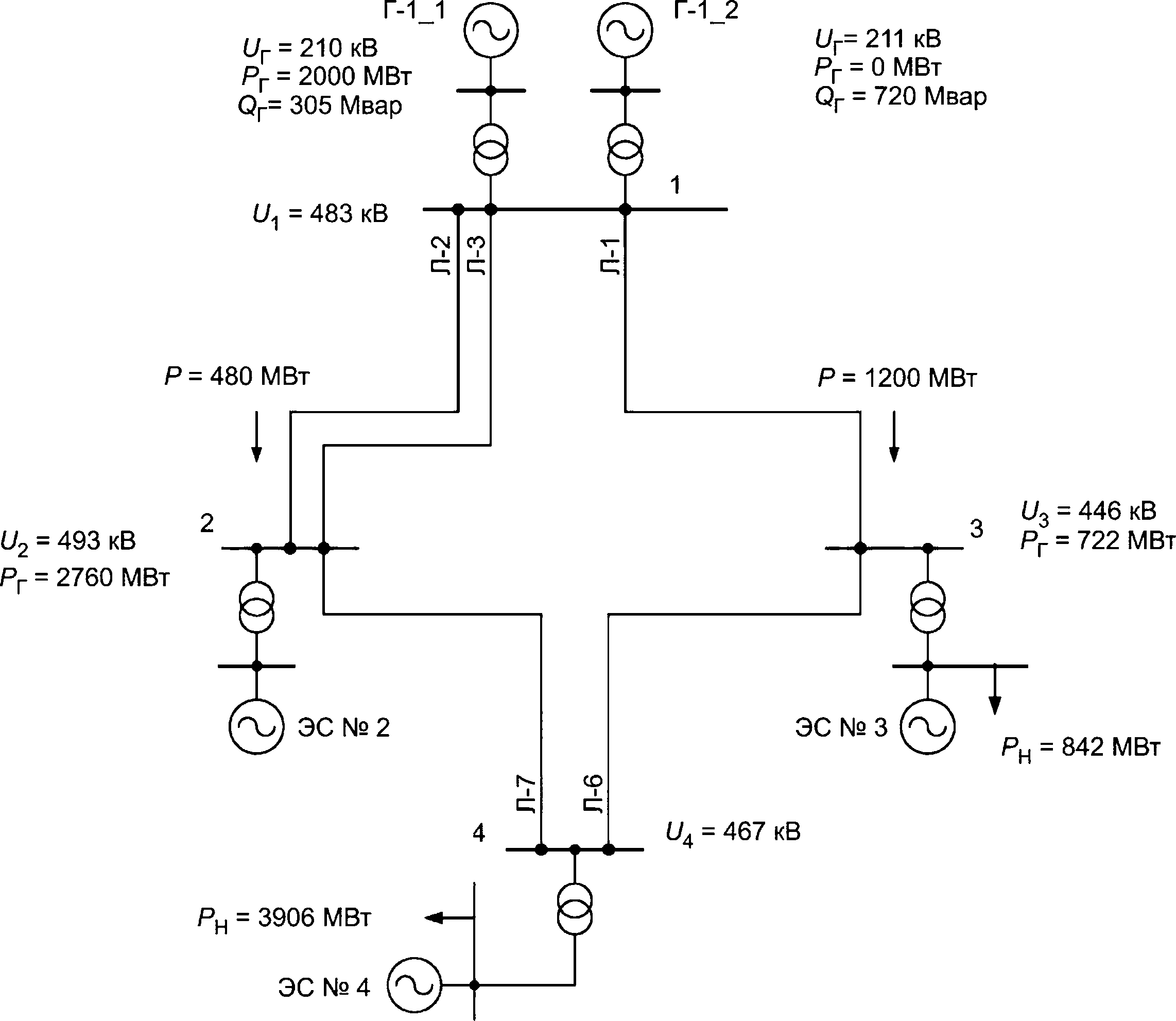
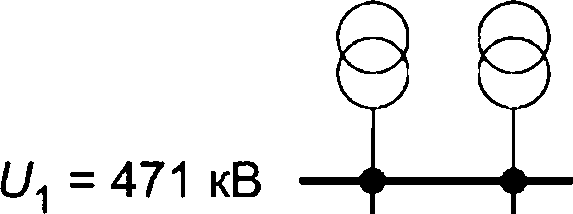
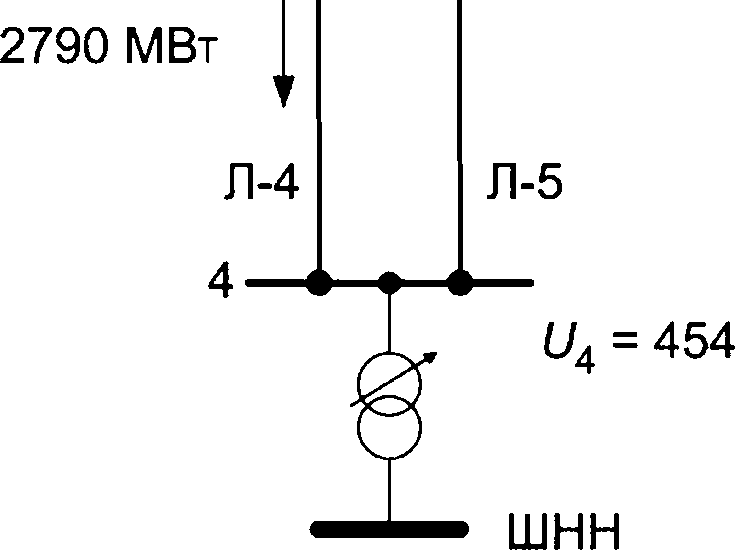
Рисунок Г.9 — Схема 3. Режим 6
■ I ■ ■■ ------- ; л ЭС № 2 Рн = 4470 МВт | чу ■ । ■ —----- Л Л-7 Л-6 ЭС№3 Ы Рн = 1480 МВт 4 1 » 1 U4 = 459 кВ 1 шнн Х12 = 33 Ом XV3 = 100 Ом ^2-4 ~ ^3-4 = 50 Ом Рисунок Г. 10 — Схема 3. Режим 7 |
XV2 = 33 Ом
Х^з = 100 Ом Х2_4 = Х3.4 = 50 Ом
Рисунок Г. 11 — Схема 3. Режим 8
Р= 1230 МВт
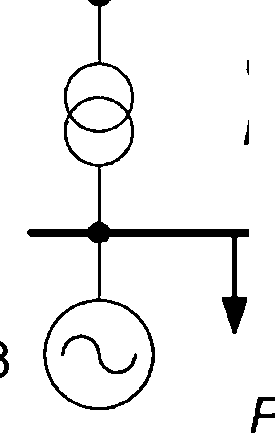
ЭС №1
Щ = 471 кВ
Ц- = 210 кВ
Рг = 2000 МВт
Ог = 582 Мвар
Р = 480 МВт
U4 = 441 кВ
U3 = 445 кВ
Рг = 790 МВт
Х^_2 — 33 Ом
Х^з = 100 Ом
^2-4 = ^3-4 = 50 Ом
Рисунок Г. 12 — Схема 4. Режим 9
Х^_2 ~ 33 Ом
X.j.3 =100 Ом
^2-4 = ^3-4 = 50 Ом
Рисунок Г. 13 — Схема 4. Режим 10
ЭС № 1
Х1-2 = 33 Ом
Х^з = 100 Ом
Хз.д = Хз-д = 50 Ом
Рисунок Г. 14 — Схема 5. Режим 11
X-j-2 — 33 Ом
Х^з =100 Ом ^2-4 = ^3-4 = 50 Ом
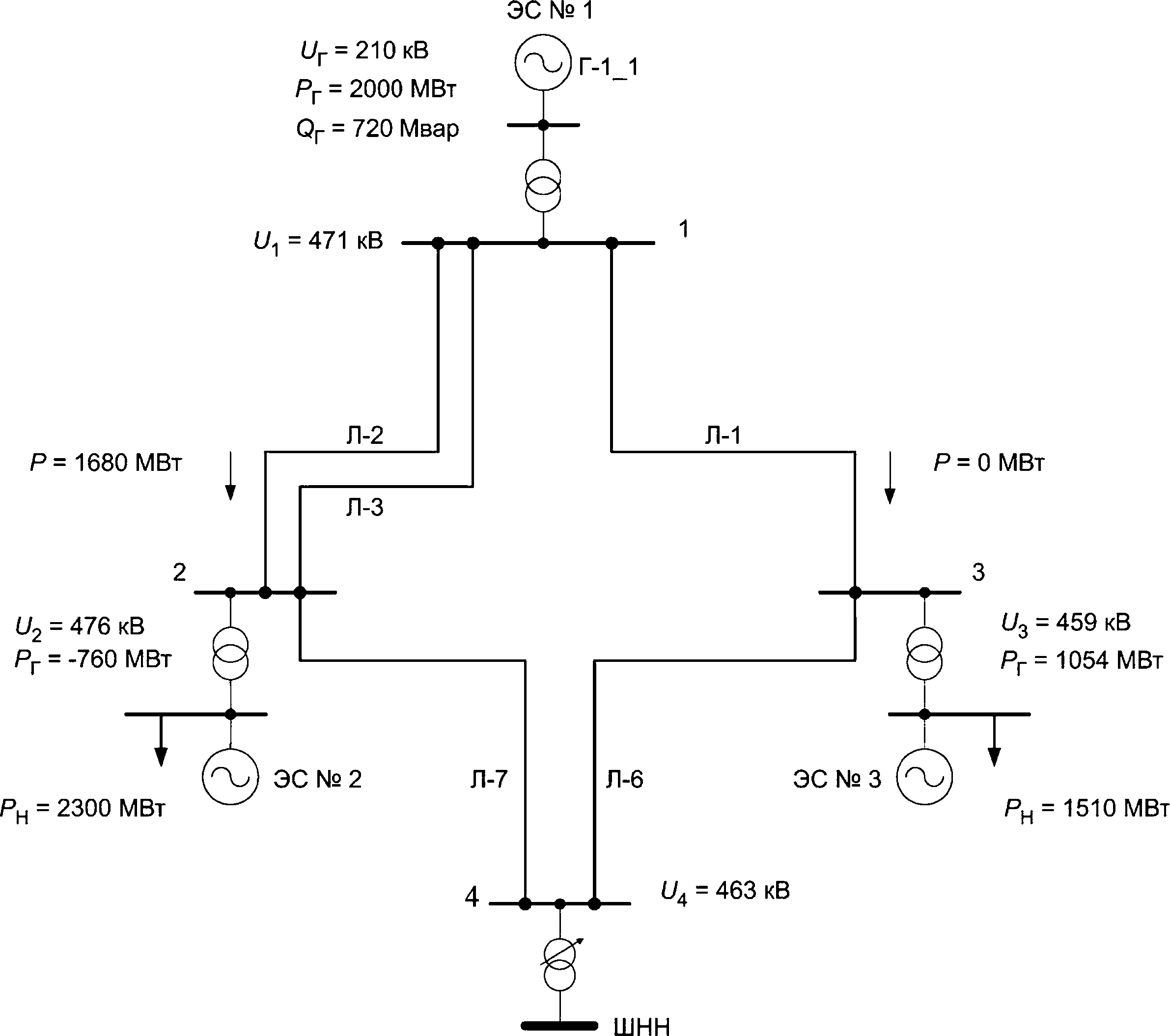
Рисунок Г. 15 — Схема 3. Режим 12
ЭС № 1
Г-1 1
L/r = 210 кВ
Рг = 2000 МВт
Qr = 700 Мвар
Г-1_2 ПА Г-1_2
L/r = 210 кВ
Рг = 2000 МВт
Qr = 700 Мвар
Р = 2340 МВт
U2 = 472 кВ
Рг = 3060 МВт
Ц = 470 кВ
Л-2
Л-3
Л-1
Р= 1200 МВт
U3 = 480 кВ
Рг = 2160 МВт
Рн = 3060 МВт
ЭС №2
Л-7
Л-6
ЭС №3
Рн = 2160 МВт
U4 = 539 кВ
ШНН
Х^_2 = 33 Ом
Х^з = 100 Ом
Х2.4 = Х3_4 = 50 Ом
Рисунок Г. 16 — Схема 3. Режим 13
Р = 480 МВт
ЭС № 1
1/|- = 210 кВ Рг= 1000 МВг Ог = 70 Мвар
U, = 497 кВ
Р = 240 МВт
U2 = 467 кВ
Рг = 2130 МВт
L/3 = 415kB
Рг = 565 МВт
Г
Рн = 540 МВт
Х^-2 - 33 Ом
Xv3 = 100 Ом ^2-4 = "^3-4 = 50 Ом
Рисунок Г. 17 — Схема 3. Режим 14
Г-1_1
Ur = 210 кВ
Рг = 2000 МВт
ЭС №1
Г-1_3
Ц- = 210кВ
Рг = 2000 МВт
Х^_4 = 20 Ом
Рисунок Г. 19 — Схема 7. Режим 16
Г-1_1
Ur = 210 кВ
Рг = 2000 МВт
ЭС №1
Г-1_3
Ur = 210 кВ
Рг= 1000 МВт
Х^_4 = 20 Ом
Рисунок Г.20 — Схема 7. Режим 17
Г.3.2 Минимально необходимый объем испытаний АРВ сильного действия
Г.3.2.1 Испытания выполняют в соответствии с программой испытаний, разработанной организацией, проводящей испытания.
Программа испытаний должна содержать эксперименты, проведение которых обеспечивает проверку:
- эффективности настройки каналов стабилизации (системного стабилизатора);
- апериодического характера нарушения статической устойчивости;
- качества стабилизации режима и проверку отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 — испытуемый АРВ, а на Г-1_2 — регулятор типа АРВ-СД);
- качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ;
- корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока;
- корректности работы функции релейной форсировки возбуждения в режимах, близких к предельным;
- обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА;
- корректности работы ОМВ;
- корректности работы ограничителя двукратного тока ротора1;
- обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока;
- корректности работы ограничителя напряжения ротора бесщеточного возбудителя2;
- корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя2;
- корректности расчета тока ротора по диаграмме Потье3.
При проведении испытаний АРВ сильного действия, применяющихся в составе БСВ, минимальный объем экспериментов должен включать все эксперименты, приведенные в таблице Г.2 (за исключением экспериментов 75, 76 и 77, если в АРВ сильного действия не реализован ограничитель двукратного тока ротора).
При проведении испытаний АРВ сильного действия, применяющихся в составе тиристорных СВ, минимальный объем экспериментов должен включать эксперименты, приведенные в таблице Г.2, за исключением экспериментов 89—91.
Г.3.2.2 Настройка испытуемых АРВ сильного действия должна быть выполнена владельцем АРВ сильного действия в соответствии с параметрами, определенными для тестовой модели энергосистемы.
Г.3.2.3 Все эксперименты, предусмотренные в программе испытаний, необходимо выполнять при неизменных параметрах настройки испытуемых АРВ сильного действия.
Г.3.2.4 Если в процессе испытаний выявлена необходимость корректировки выбранных параметров настройки (в любом из экспериментов, предусмотренных программой испытаний, не обеспечивается корректная работа АРВ сильного действия), владелец АРВ сильного действия или уполномоченное им лицо выполняет корректировку параметров настройки испытуемых АРВ сильного действия, после чего все эксперименты, предусмотренные программой испытаний, должны быть выполнены повторно с новыми параметрами настройки АРВ сильного действия.
Г.3.2.5 Если при проведении испытаний АРВ сильного действия невозможно осуществить выбор параметров настройки, при которых обеспечивается корректная работа АРВ сильного действия во всех экспериментах, предусмотренных программой испытаний, испытуемый АРВ сильного действия и алгоритм его функционирования признаются не соответствующими требованиям [2].
Г.3.2.6 Регистрацию параметров электроэнергетического режима следует выполнять для каждого эксперимента.
Г.4 Анализ с проверкой выполнения критериев оценки результатов испытаний
Результаты испытаний считают положительными, а АРВ сильного действия и алгоритм его функционирования успешно прошедшими испытания, если обеспечивается корректная работа АРВ сильного действия во всех экспериментах, предусмотренных программой испытаний, с выполнением как общих, так и индивидуальных критериев оценки результатов испытаний, приведенных в Г.4.1 и Г.4.2 соответственно.
Общие критерии оценки результатов испытаний должны выполняться для всех экспериментов, предусмотренных программой испытаний, индивидуальные критерии должны выполняться только для экспериментов, для которых они установлены.
Г.4.1 Общие критерии оценки результатов испытаний
Г.4.1.1 При введенных каналах стабилизации (включенном системном стабилизаторе) демпфирование электромеханических переходных процессов на собственной частоте колебаний генератора следует обеспечивать за время не более 15 с.
Г.4.1.2 При моделировании всех возмущений, связанных с КЗ, сопровождающихся снижением напряжения статора генератора, должна работать функция релейной форсировки в соответствии с критериями, установленными в Г.4.2.6.
Г.4.1.3 При моделировании возмущений (кроме экспериментов по проверке корректности действия ОМВ, двукратного тока ротора, напряжения ротора, двукратного тока возбуждения возбудителя) действующее значение напряжения С/Г1 1(Ц-_1 3) прямой последовательности статора генератора Г-1_1 (Г-1_3) в результате действия релейной форсировки возбуждения не должно превышать 1,1 о.е. от исходного (предаварийного) действующего значения напряжения иГ1 3).
Г.4.2 Индивидуальные критерии оценки результатов испытаний
Г.4.2.1 В экспериментах 1—18 выполняется проверка эффективности настройки каналов стабилизации (системного стабилизатора). Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2).
Критерием эффективности работы каналов стабилизации (системного стабилизатора) АРВ сильного действия является: время затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) снижается по сравнению с временем затухания при выведенных каналах стабилизации (отключенном системном стабилизаторе).
График, характеризующий эффективную работу каналов стабилизации (системного стабилизатора), приведен на рисунке Г.21.
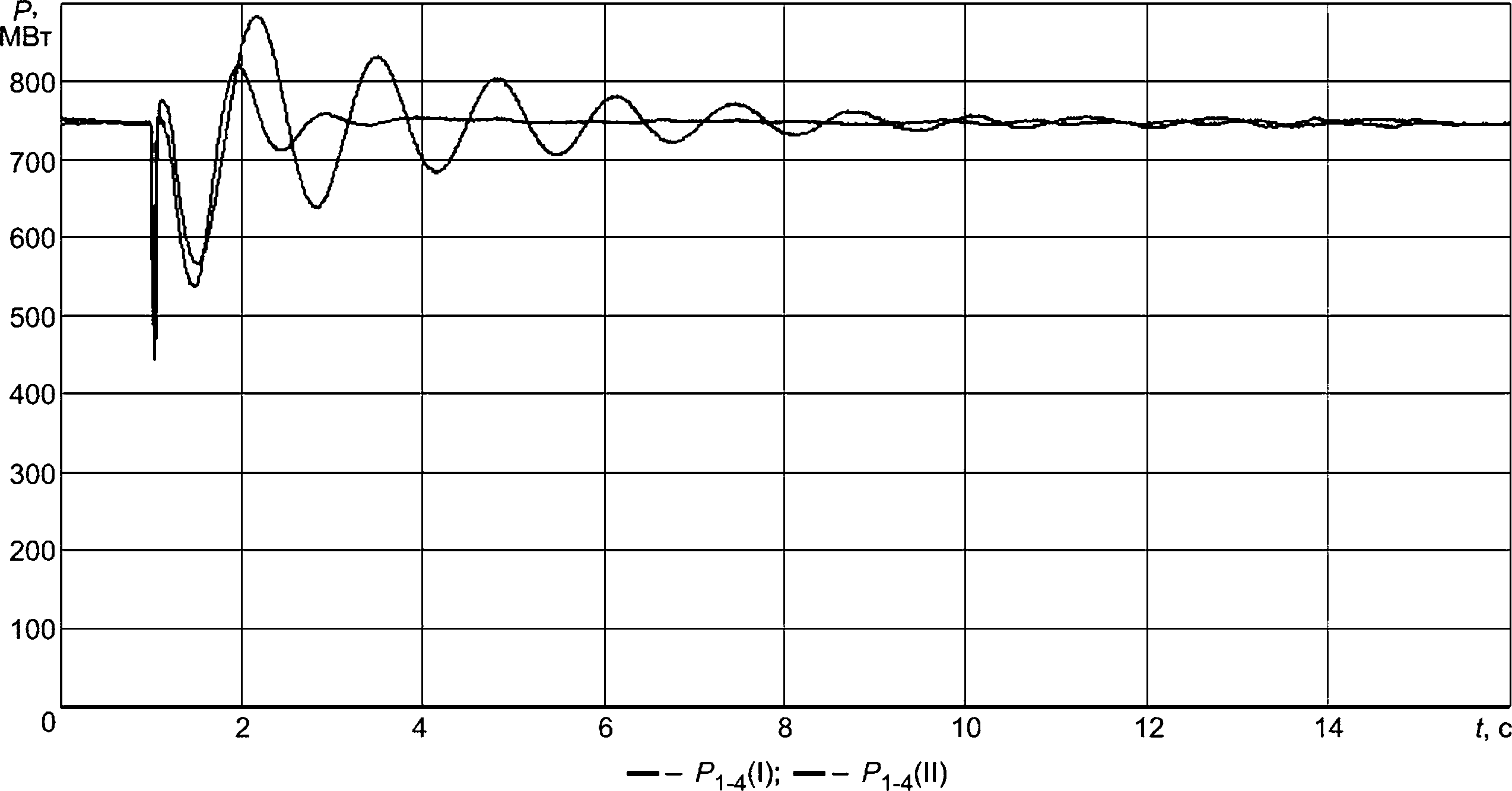
I — каналы стабилизации введены (системный стабилизатор включен);
II — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Г.21 — Эффективная работа каналов стабилизации (системного стабилизатора)
Г.4.2.2 В экспериментах 19—22 выполняется проверка апериодического характера нарушения статической устойчивости.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что она выполняется в режимах, близких к предельным по статической устойчивости.
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 19—22 является: при утяжелении электроэнергетического режима до достижения предела по статической устойчивости должен обеспечиваться апериодический характер нарушения устойчивости (отсутствие синхронных колебаний).
Графики, характеризующие эффективную и неэффективную работу каналов стабилизации (системного стабилизатора) в электроэнергетических режимах, близких к предельному по статической устойчивости, приведены на рисунках Г.22а) и Г.226) соответственно.
Г.4.2.3 В экспериментах 23—38 выполняют проверку качества стабилизации режима и проверку отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 устанавливают испытуемый АРВ; на Г-1_2 — регулятор типа АРВ-СД). Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2).
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 23—38 является обеспечение:
- демпфирования электромеханических переходных процессов;
- отсутствия взаимного раскачивания синхронных генераторов.
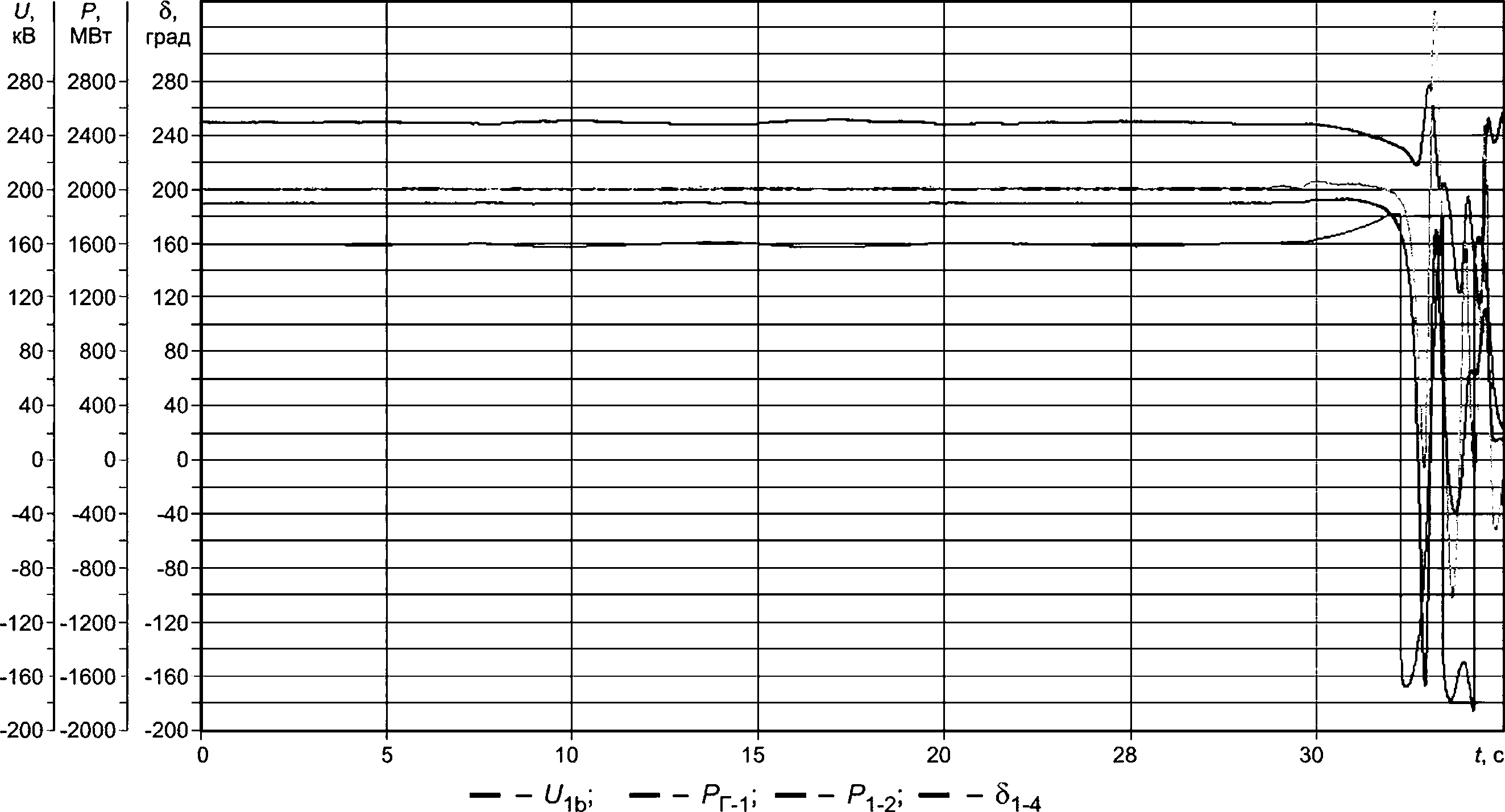
а) Эффективная работа каналов стабилизации
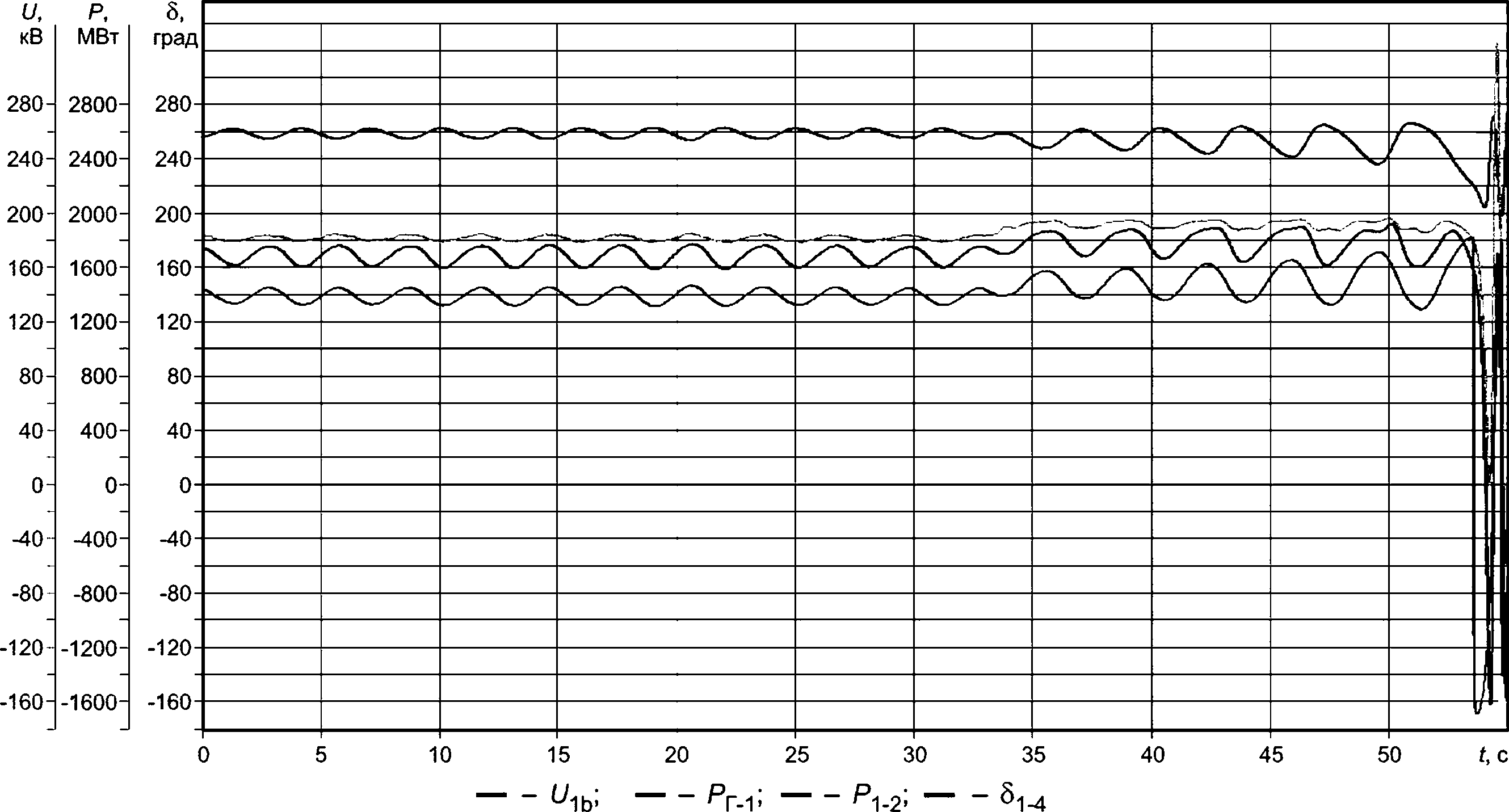
б) Неэффективная работа каналов стабилизации
Рисунок Г.22 — Эффективная и неэффективная работа каналов стабилизации (системного стабилизатора)
График переходного процесса при тестовом возмущении, характеризующим корректную работу АРВ сильного действия с обеспечением демпфирования электромеханических переходных процессов и отсутствием взаимного раскачивания синхронных генераторов, приведен на рисунке Г.23.
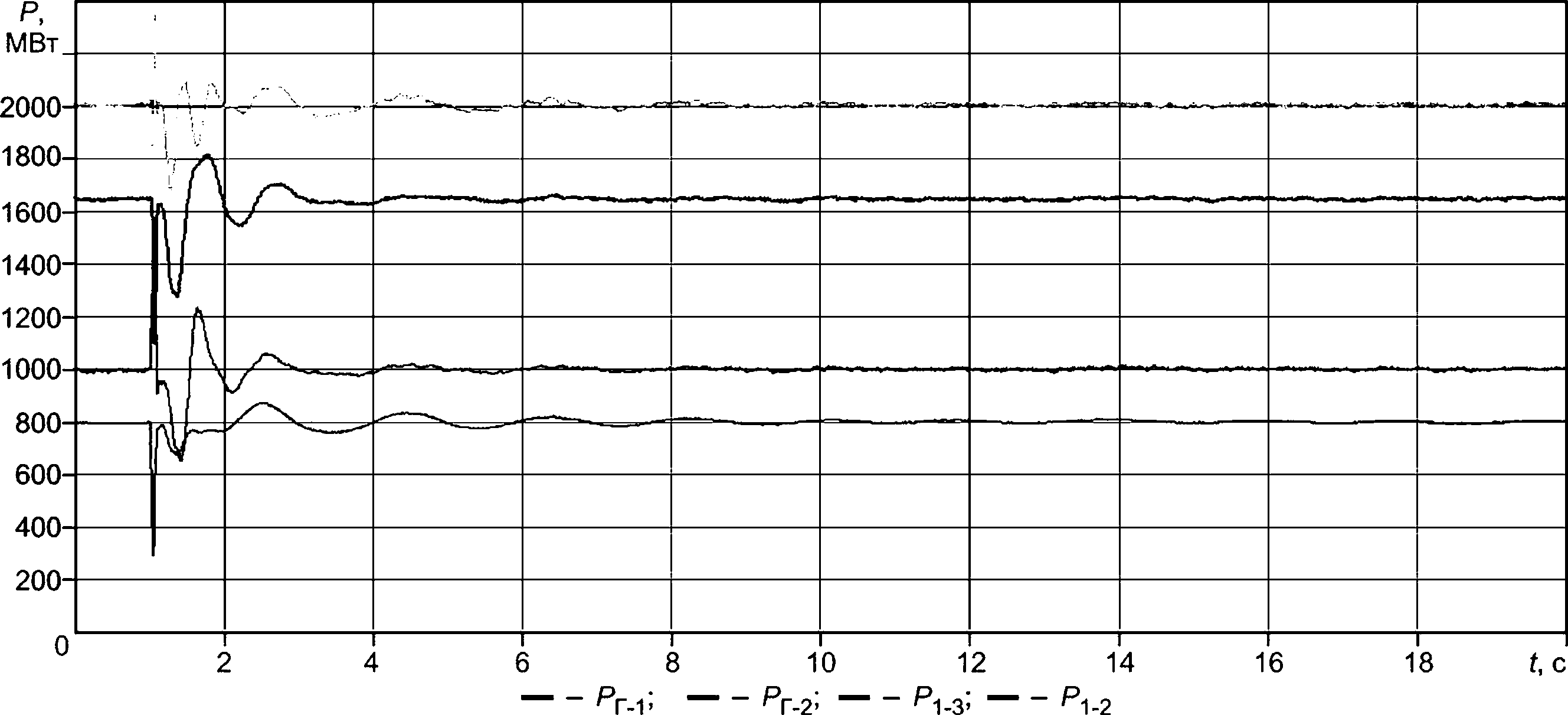
Рисунок Г.23 — Корректная работа АРВ сильного действия при совместной работе с регуляторами других типов на одной электростанции
Г.4.2.4 В экспериментах 39—52 выполняют проверку качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ. Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2).
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 39—52 является уменьшение времени затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) по сравнению с временем затухания электромеханических переходных при выведенных каналах стабилизации (отключенном системном стабилизаторе) при моделировании нормативных возмущений групп I, II и III согласно требованиям [3] в соответствии с перечнем, указанным в таблице Г2.
График, характеризующий эффективную работу каналов стабилизации (системного стабилизатора) при двухфазном КЗ на землю вблизи шин электрической станции № 1 с неуспешным ТАПВ одной цепи линии Л-2, приведен на рисунке Г.24.
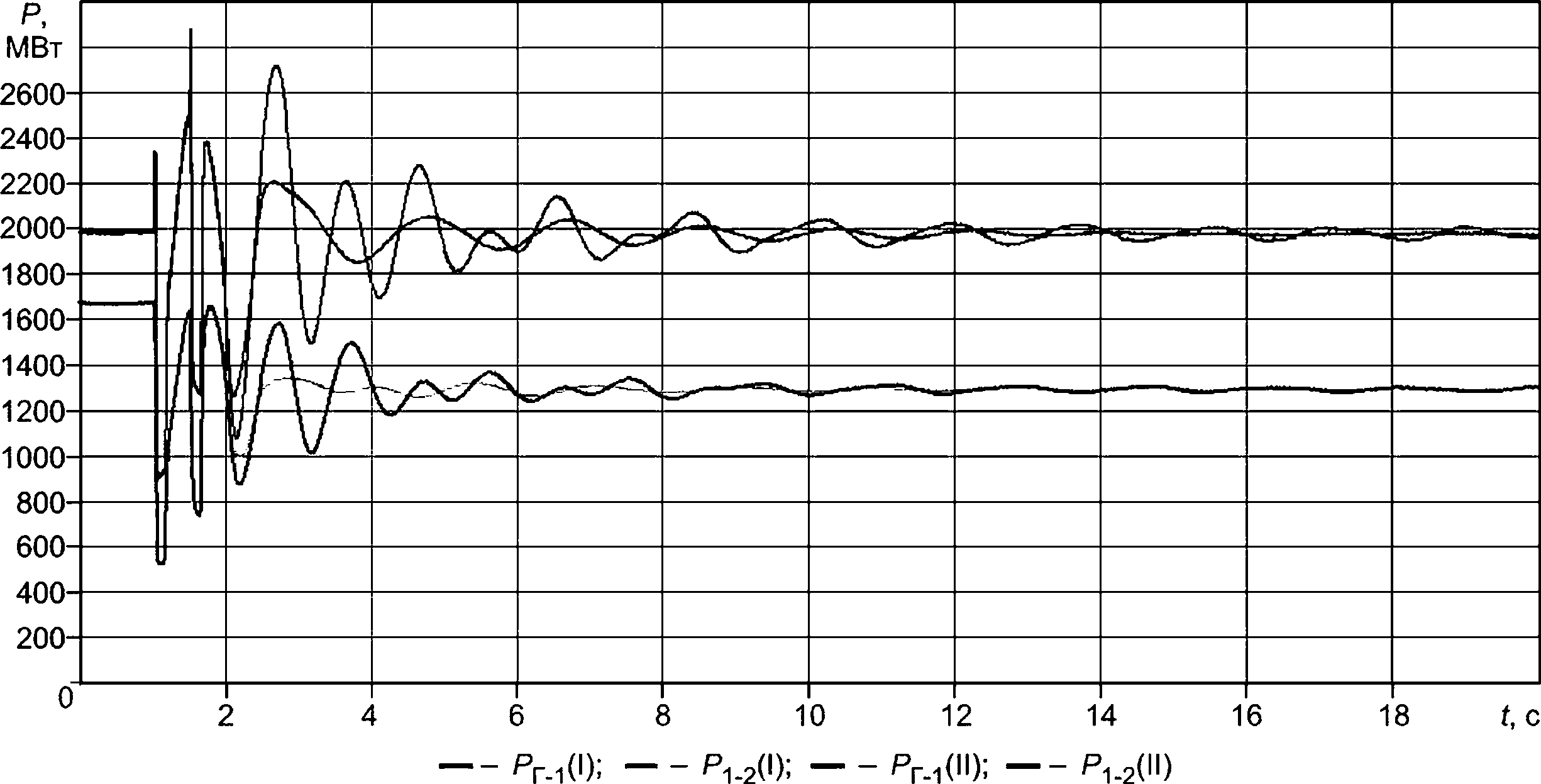
I — каналы стабилизации введены (системный стабилизатор включен); II — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Г.24 — Эффективная работа каналов стабилизации (системного стабилизатора) при двухфазном КЗ на землю вблизи шин электрической станции № 1 с неуспешным ТАПВ одной цепи линии Л-2
Г.4.2.5 В экспериментах 53—63 выполняют проверку корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что изменения частоты электрического тока моделируются посредством создания небалансов активной мощности, приводящих к увеличению/уменьшению частоты в энергосистеме со скоростью 0,05 Гц/с и более. Особенностью проведения экспериментов 53—61 является то, что каждое аварийное отключение моделируется трижды:
- при введенной функции блокировки каналов стабилизации (системного стабилизатора);
- при выведенной функции блокировки каналов стабилизации (системного стабилизатора);
- при выведенных каналах стабилизации (отключенном системном стабилизаторе).
При этом корректность работы функции блокировки каналов стабилизации (системного стабилизатора) при возникновении небалансов мощности в энергосистеме должна оцениваться посредством сравнения характера изменения напряжения Г-1_1 при каждом из трех вышеуказанных состояний.
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 53—61 является: в режиме введенной в работу функции блокировки каналов стабилизации обеспечивается автоматический ввод функции блокировки каналов стабилизации (системного стабилизатора) за время не более 1,5 с после аварийного отключения нагрузки (генерации).
Графики, характеризующие корректную работу функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении генератора, приведены на рисунках Г.25, Г.26 и Г.27.
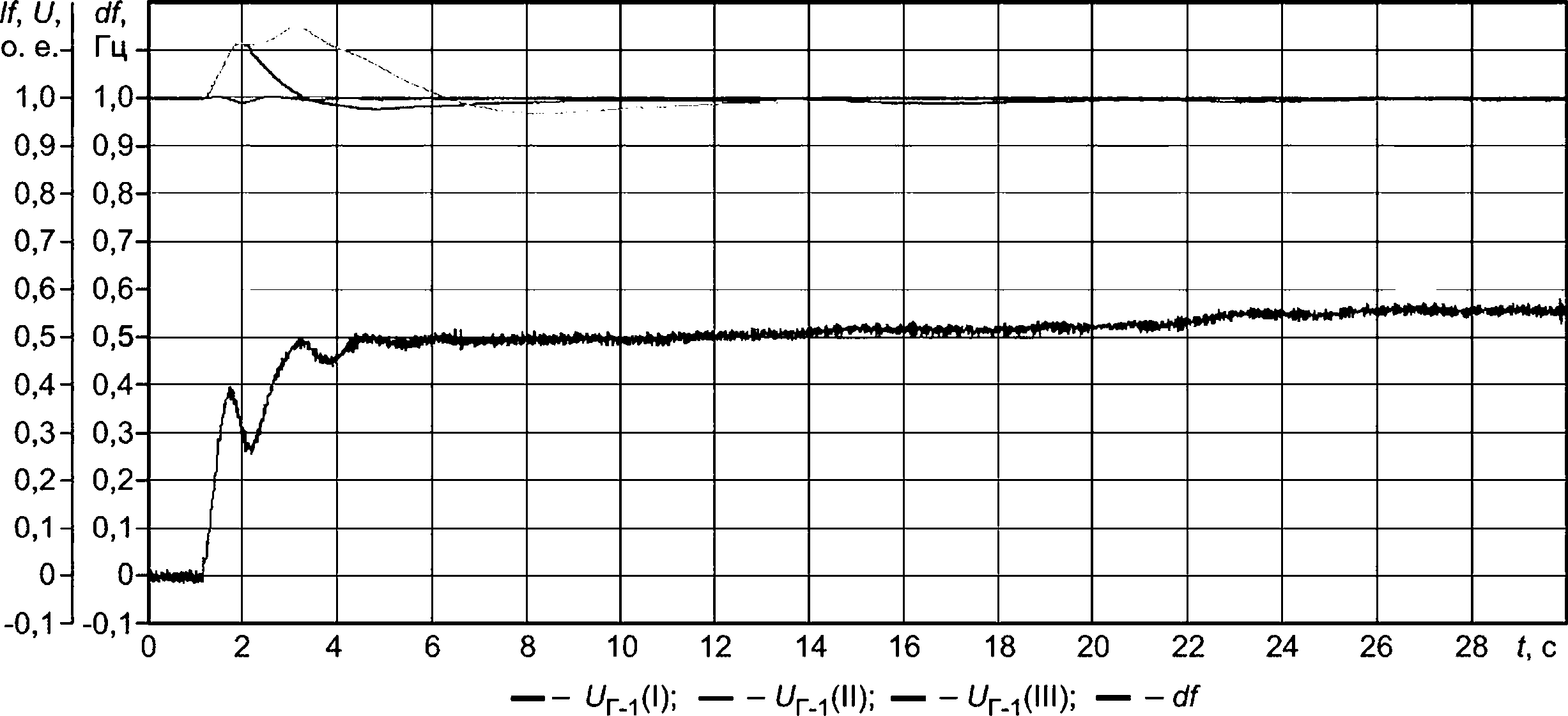
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Г.25 — Корректная работа функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении нагрузки на электрической станции № 2
if, и,
о. е.
0,9-
0,8-
0,7-
0,6-
0,5-
0,4-
0,3-
0,2-
0,1-
0-
df, Гц 0,45-0,40 0,35-0,30 0,25-0,20-0,15-О,Io-О.05-
О
-0,1- -0,05-
-0,2- -0,10-
-0,3- -0,15-
-0,4
-0,20-
-0,5- -0,25-
-0,6- -0,30-
-0,7- -0,35-
-0,8
-0,40
-0,9 J -0,45-О
—\ | ||||||||||
Л | ||||||||||
\ | ||||||||||
л. | ||||||||||
Ь'-ЙЫ Ь л | • a k >44* | |||||||||
l***w4w | нНИГИ*** | |||||||||
2
6
10
12
14
16
18
4
t, с
8
-df
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Г.26 — Корректная работа функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении генератора на электрической станции № 3
If, и, df, | ||||||||||
о. е. Гц | ||||||||||
ПЯ П4Л- | ||||||||||
Л 7 Л ОК- | ||||||||||
и, ( и,оо 0,6- 0,30- Л С Л ОС | — | - | ||||||||
U,0 U,2O ПИ Л ОЛ- | ||||||||||
и,-п U,ZU Л О Л 4К- | ||||||||||
и,О U, 10 л О Л 4Л- | ||||||||||
u,z и, 1 и Л 1- Л ЛК- | ||||||||||
и, I U,UO Л А | ||||||||||
U U А 4 Л АД- | ||||||||||
-V, I “U,UO А О Л 4Л | 1 | |||||||||
"V,Z -U, IU Л О- Л 4К- | ||||||||||
“V,u “U, IO л А л пл | ||||||||||
-U ,4 -U,2U ЛК л ОК - | ||||||||||
-U,О -U,ZO Л Л Л ол _ | ||||||||||
“V,D -U, OU Л 7- Л ОК- | 1 / | |||||||||
“U,/ -U,oO ЛЯ Л ИЛ- | V | |||||||||
-и,о -и,чи Л Q- Л ИК- | ||||||||||
-U,У -U,40 4 Л Л КА- | ||||||||||
- I ,и -и,ои | V | |||||||||
4 4 - Л КК | 1W | |||||||||
- I, I -U,ОО 4 0 Л КА | ||||||||||
-1,Z "U,DV^ | 2 4 | 3 1 | 0 1 | 2 1 | 4 1 | 6 1 | 8 Г, с | |||
--Ц-.^!); — -6^(11); — -им(1П); — -df
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Г.27 — Корректная работа функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении генератора на электрической станции № 2
В экспериментах 62 и 63 выполняют проверку селективности действия функции блокировки каналов стабилизации (системного стабилизатора).
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 62 и 63 является обеспечение идентичности электромеханических переходных процессов в указанных экспериментах.
График, характеризующий некорректную работу АРВ сильного действия [неселективности функции блокировки каналов стабилизации (системного стабилизатора)], приведен на рисунке Г.28.
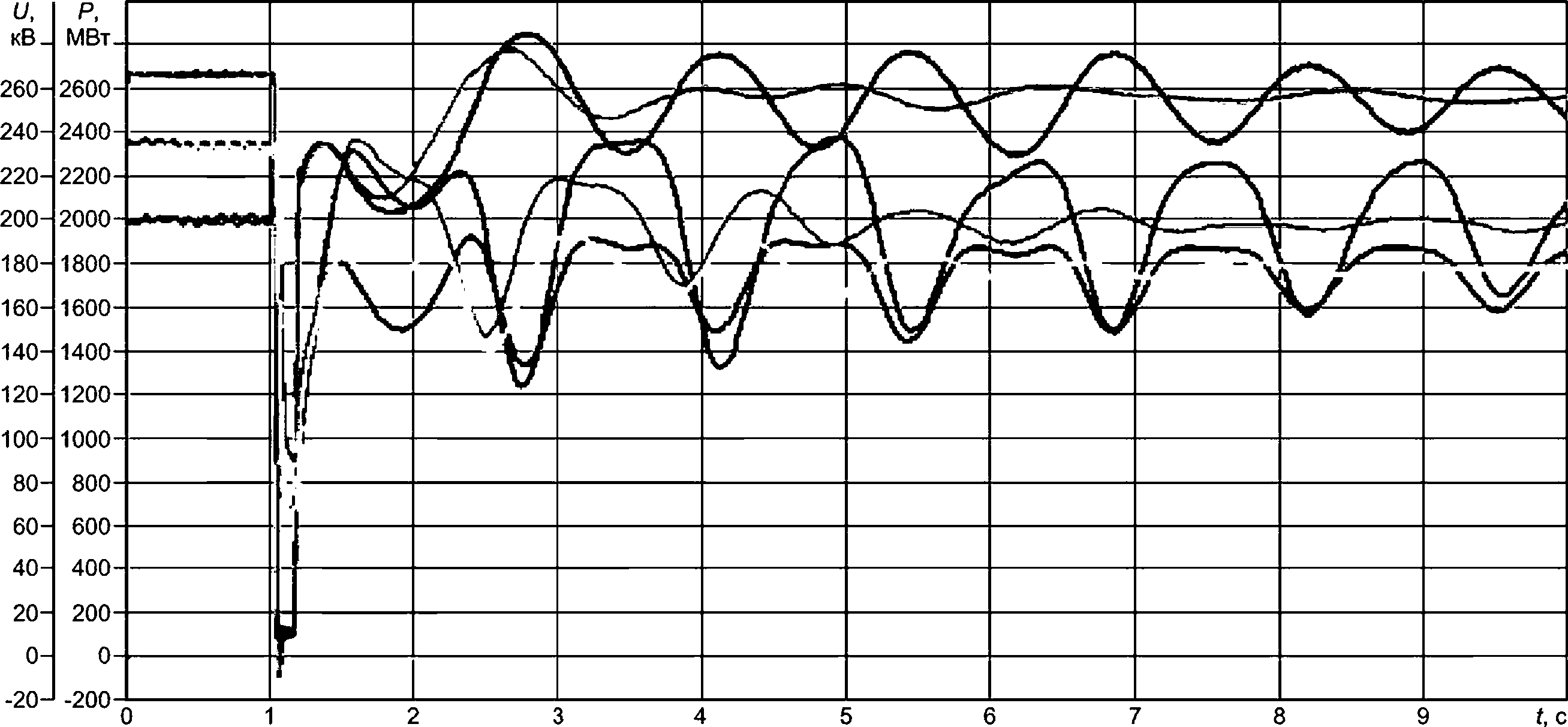
— - C/1b(l); — - Рм(I);--^.2(1); — - U1b(ll); — - P^fll); - P^ll)
I — функция блокировки введена;
II — функция блокировки выведена (блокировка вводится при синхронных колебаниях)
Рисунок Г.28 — Некорректная работа функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия
Г.4.2.6 В экспериментах 64—67 выполняют проверку корректности работы функции релейной форсировки возбуждения в режимах, близких к предельным.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения экспериментов 64—67 является то, что при проверке должна рассматриваться работа АРВ сильного действия в предельном по устойчивости режиме и нарушении динамической устойчивости.
Критериями корректности работы функции релейной форсировки АРВ сильного действия являются:
- ввод релейной форсировки возбуждения без временной задержки при снижении напряжения на статоре генератора ниже 85 % исходного значения;
- обеспечение поддержания потолочного значения напряжения возбуждения генератора вплоть до восстановления напряжения на статоре генератора до исходного значения4 или до нарушения динамической устойчивости.
Графики, характеризующие корректную работу АРВ сильного действия при нарушении динамической устойчивости и в предельном по устойчивости режиме, приведены на рисунках Г.29 и ГЗО соответственно.
Г.4.2.7 В экспериментах 68, 69 выполняют проверку обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения экспериментов 68, 69 является то, что устойчивость в послеаварийной схеме может быть обеспечена только за счет снижения перетока активной мощности от электрической станции № 1, для сохранения устойчивости через 0,4 с с момента возникновения КЗ должна срабатывать ПА, действующая на отключение Г-1_2 электрической станции № 1.
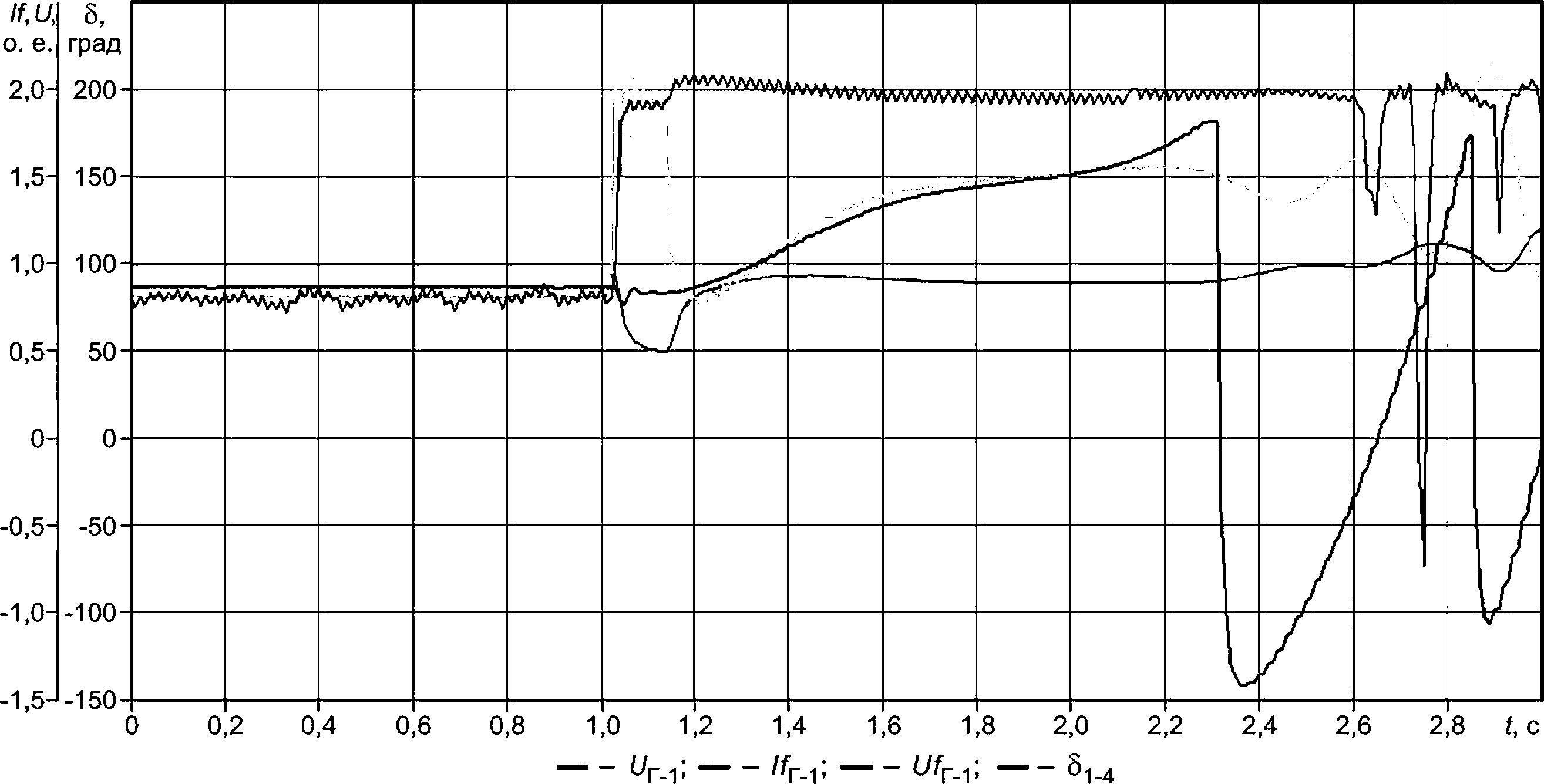
Рисунок Г.29 — Корректная работа АРВ сильного действия при нарушении динамической устойчивости
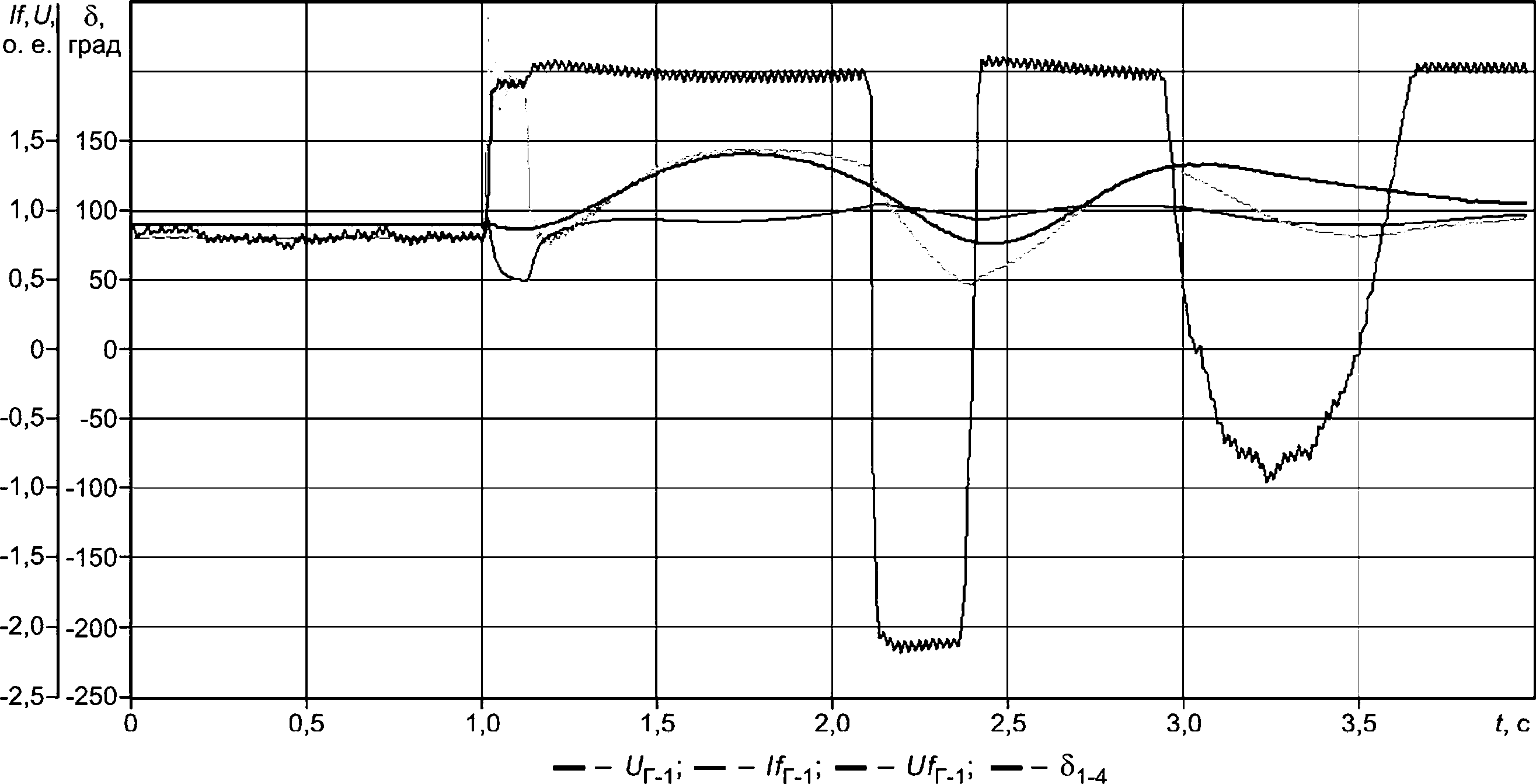
Рисунок Г.30 — Корректная работа АРВ сильного действия в предельном по устойчивости режиме
Критериями эффективной работы АРВ сильного действия с учетом действия устройств ПА являются:
- снижение времени затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) по сравнению с временем затухания при выведенных каналах стабилизации (отключенном системном стабилизаторе);
- корректная работа функции релейной форсировки в соответствии с критериями, указанными в Г.4.2.6.
График, характеризующий корректную работу АРВ сильного действия с учетом работы устройств ПА, приведен на рисунке Г.31.
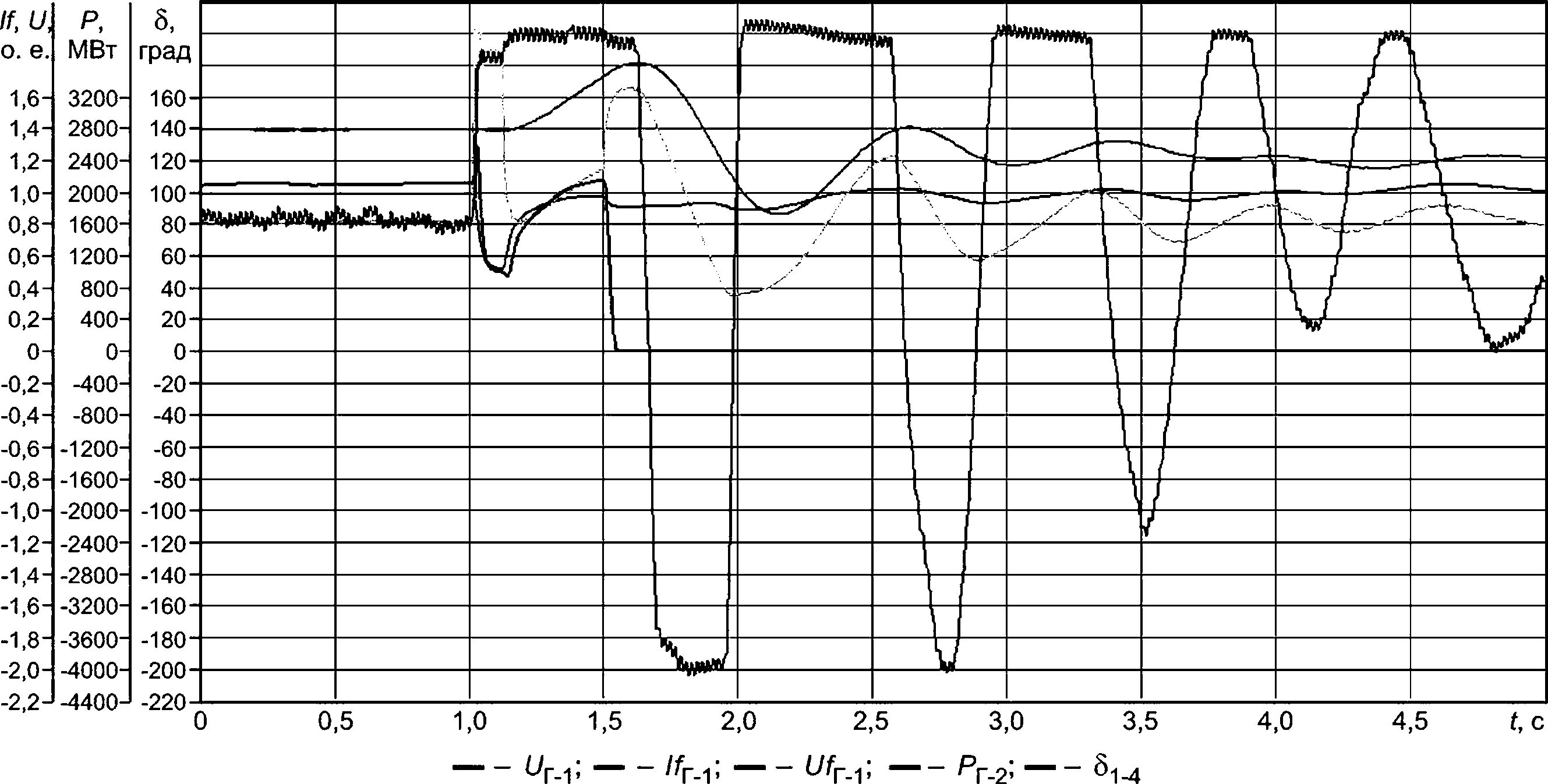
Рисунок Г.31 — Корректная работа АРВ сильного действия с учетом работы устройств ПА
Г.4.2.8 В экспериментах 70—74 выполняют проверку корректности работы ОМВ.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что ее выполняют в статическом и динамическом режимах. При проведении экспериментов 70—74 должна быть задана характеристика ОМВ в соответствии с таблицей Г.11.
Таблица Г.11—Характеристики ОМВ
Точка характеристики | Р МВт | Q, Мвар |
1 | 0 | -600 |
2 | 1000 | -500 |
3 | 1500 | -390 |
4 | 2000 | -300 |
Критерием корректной работы АРВ сильного действия при функционировании ОМВ в статическом режиме (при медленном изменении напряжения в энергосистеме или при медленном увеличении активной мощности генератора без моделирования возмущения) является: вход в зону ОМВ, а также выход из зоны ОМВ имеет апериодический (неколебательный) характер.
Графики, характеризующие корректную работу АРВ сильного действия в статическом режиме при медленном изменении напряжения в энергосистеме и при медленном увеличении активной мощности генератора, приведены на рисунках Г.32 и Г.ЗЗ соответственно.
Критерием корректной работы АРВ сильного действия при функционировании ОМВ в динамическом режиме (при изменении баланса реактивной мощности за счет включения и последующего (через 6—10 с) отключения емкости на шинах электрической станции № 1) является: вход в зону ОМВ в начальной фазе переходного процесса не должен приводить к превышению потребляемой синхронным генератором реактивной мощности более чем на 30 % по отношению к заданной уставке ОМВ.
График, характеризующий корректную работу АРВ сильного действия при входе в зону ОМВ и выходе из зоны ОМВ в динамическом режиме, приведен на рисунке Г.34.
Работа в зоне ОМВ не должна сопровождаться колебаниями тока возбуждения и реактивной мощности. Если в эксперименте с введенными каналами стабилизации (включенным системным стабилизатором) будут наблюдаться колебания тока возбуждения и реактивной мощности, в алгоритм функционирования АРВ сильного действия следует ввести блокировку каналов стабилизации (системного стабилизатора) при переходе в зону ОМВ. 48
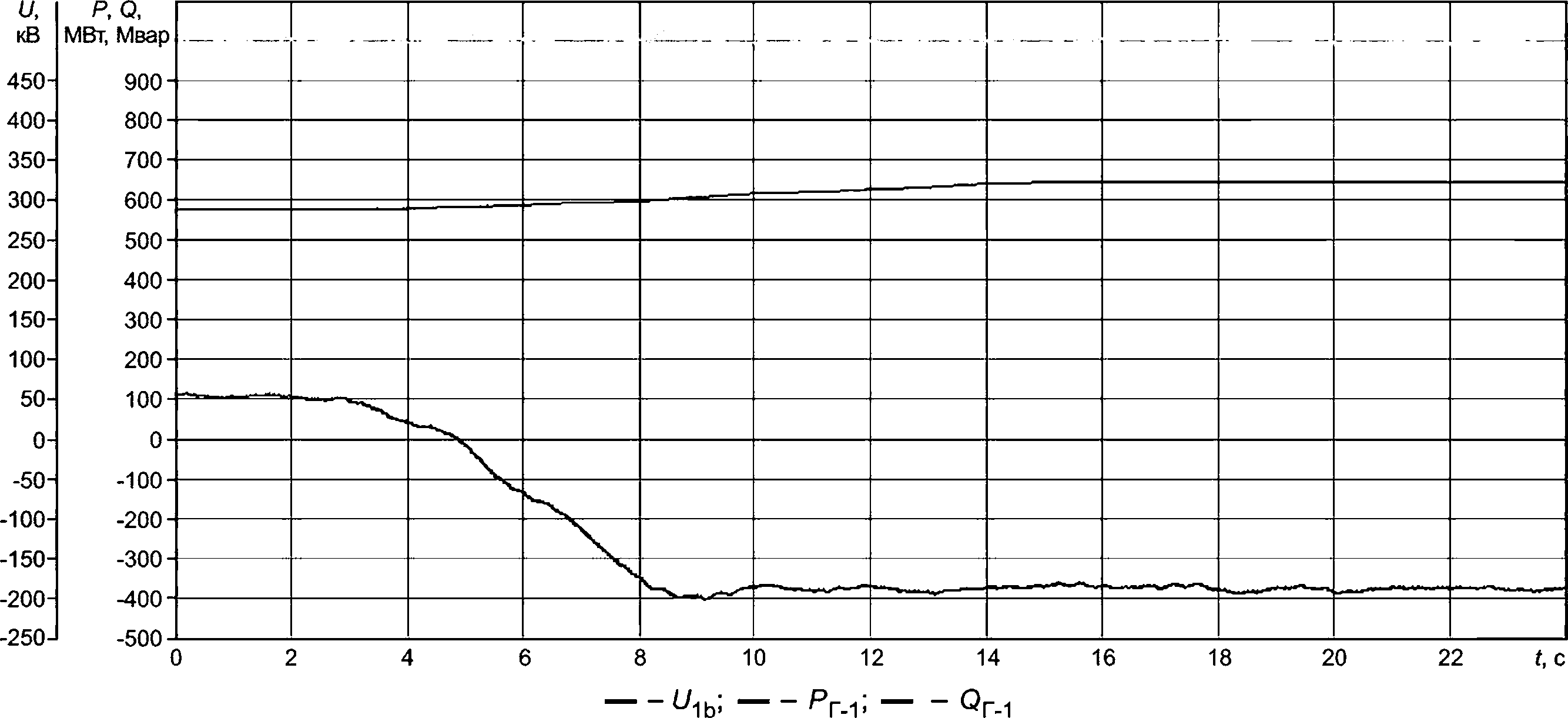
Рисунок Г.32 — Корректная работа АРВ сильного действия (плавного входа в зону ОМВ) в статическом режиме при медленном изменении напряжения в энергосистеме
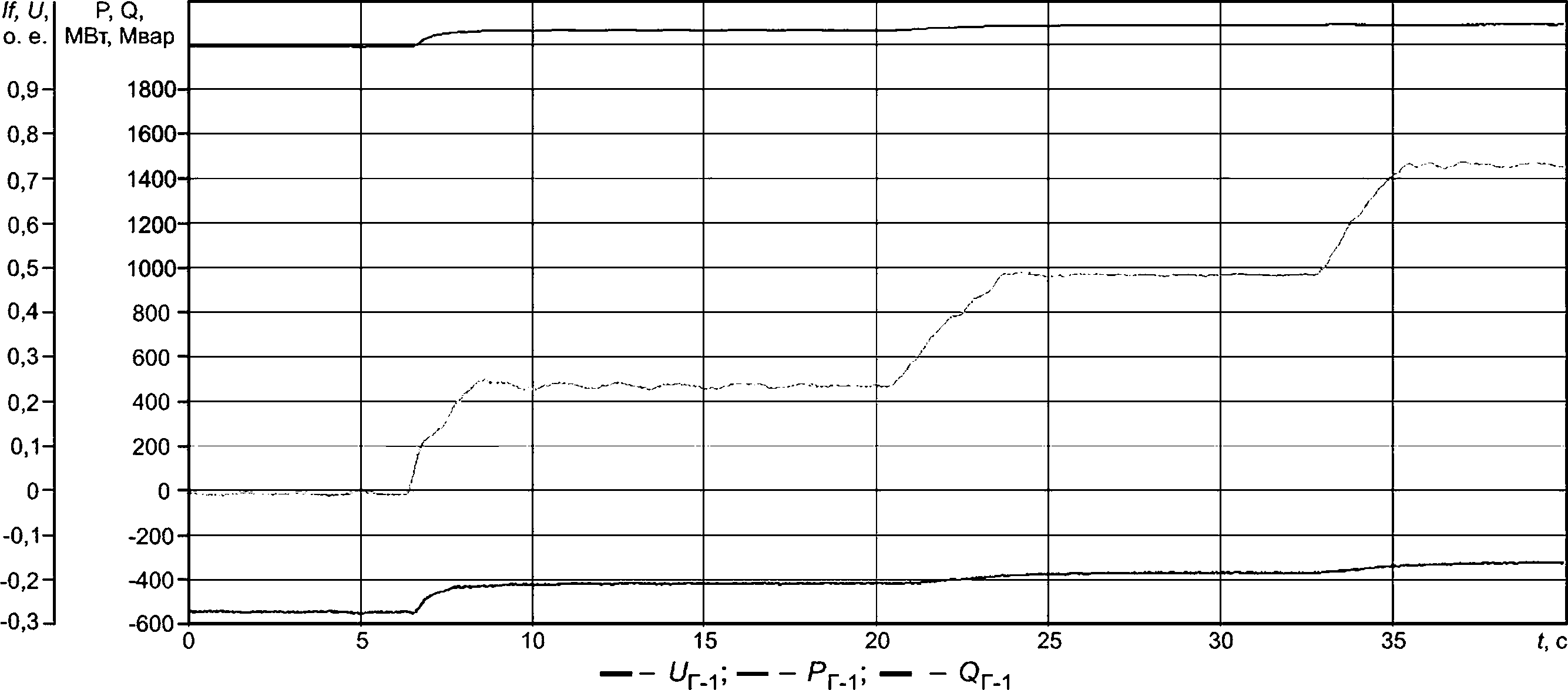
Рисунок Г.ЗЗ — Корректная работа АРВ сильного действия (плавного входа в зону ОМВ) в статическом режиме при медленном увеличении активной мощности генератора
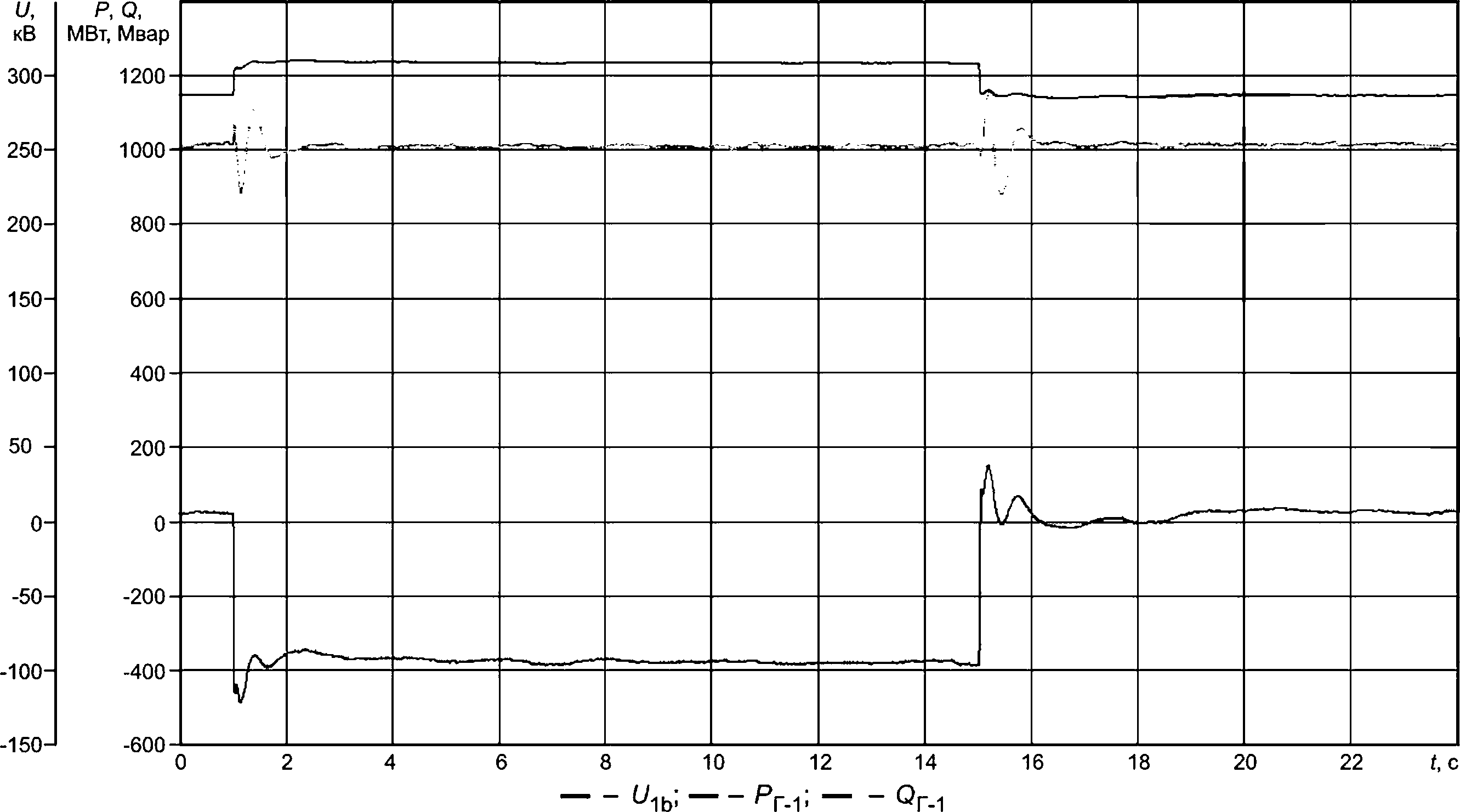
Рисунок Г.34 — Корректная работа АРВ сильного действия при входе в зону ОМВ и выходе из зоны ОМВ в динамическом режиме
Г.4.2.9 В экспериментах 75—77 выполняют проверку корректности работы ограничителя двукратного тока ротора.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения эксперимента 75 является то, что для АРВ сильного действия, у которых реализован ограничитель двойного тока ротора для БСВ, следует дополнительно регистрировать расчетный ток ротора, определяемый по диаграмме Потье.
Критериями корректности работы двукратного тока ротора при проведении эксперимента 75 являются:
- ограничитель двойного тока ротора должен вступать в работу без выдержки времени и перерегулирования (см. рисунок Г.35);
- обеспечивается совпадение установившегося, измеренного и расчетного значений тока ротора (см. рисунок Г.36).
Особенностью проведения экспериментов 76 и 77 является то, что при проверке необходимо обеспечить выполнение следующих условий:
- ввод ограничения двукратного тока ротора следует выполнять с выдержкой времени, достаточной для затухания периодических токов, вызванных близкими КЗ, не препятствуя вводу релейной форсировки возбуждения;
- задержка времени на ввод ограничителя двукратного тока ротора должна иметь возможность регулирования в диапазоне от 100 до 600 мс.
Критериями корректности работы двукратного тока ротора экспериментов 76 и 77 являются:
- ограничитель должен вступать в работу с заданной (от 100 до 600 мс) выдержкой времени;
- ограничение тока ротора должно осуществляться без перерегулирования (ограничитель должен ограничивать ток ротора на заданном уровне уставки).
Графики, характеризующие корректную работу ограничителя двукратного тока ротора при моделировании затянувшегося двухфазного КЗ на землю вблизи шин ЭС № 1 и при моделировании серии из двух последовательных двухфазных КЗ на землю вблизи шин ЭС № 1 приведены на рисунках Г.37 и Г.38 соответственно.
if, U,
о. е.
1,8
1,7
1,6
1,5
1,4
1,3
1,2
0,9 0,8 0,7 0,6 0,5 0,4
0,3 0,2 0,1
0 -0,1 -0,2 -0,3 -0,4
--г | tkkfek WW-- | |||||||||
-Г ) V J'S | ||||||||||
»>. _ kLiX^khk. | ||||||||||
— | — | _____ Ог-- | _ | — | ||||||
0
0,5
1,0
1,5
2,0
4,0
4,5
5,0
5,5 t, с
2,5 3,0 3,5
--/Гг
Примечание — Уставка ограничителя задана на уровне 1,1 lfH0M.
Рисунок Г.35 — Корректная работа ограничителя двукратного тока ротора при подаче тестового сигнала на увеличение уставки по напряжению генератора на 30 %
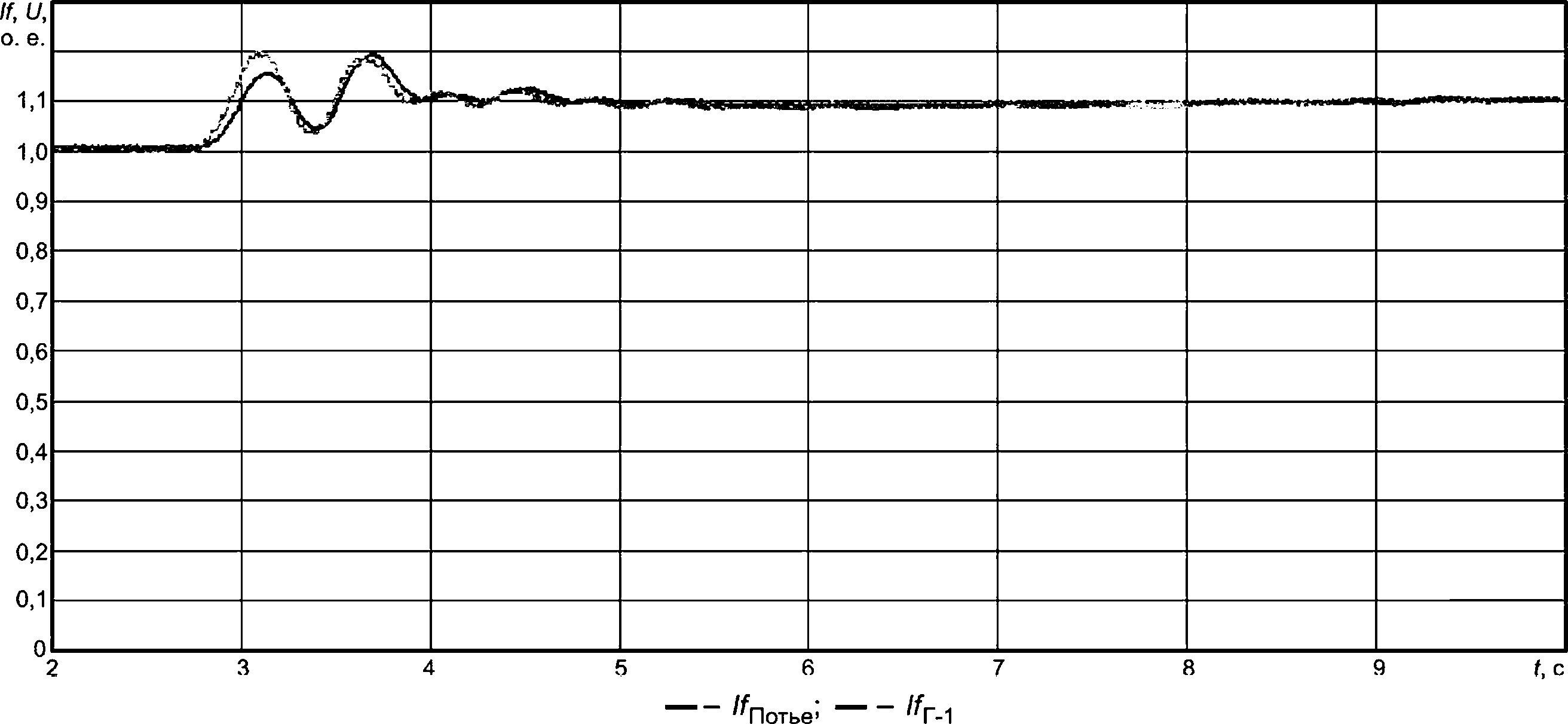
Примечание — Уставка ограничителя задана на уровне 1,1 /fH0M.
Рисунок Г.36 — Корректная работа ограничителя двукратного тока ротора при подаче тестового сигнала на увеличение уставки по напряжению генератора на 30 %
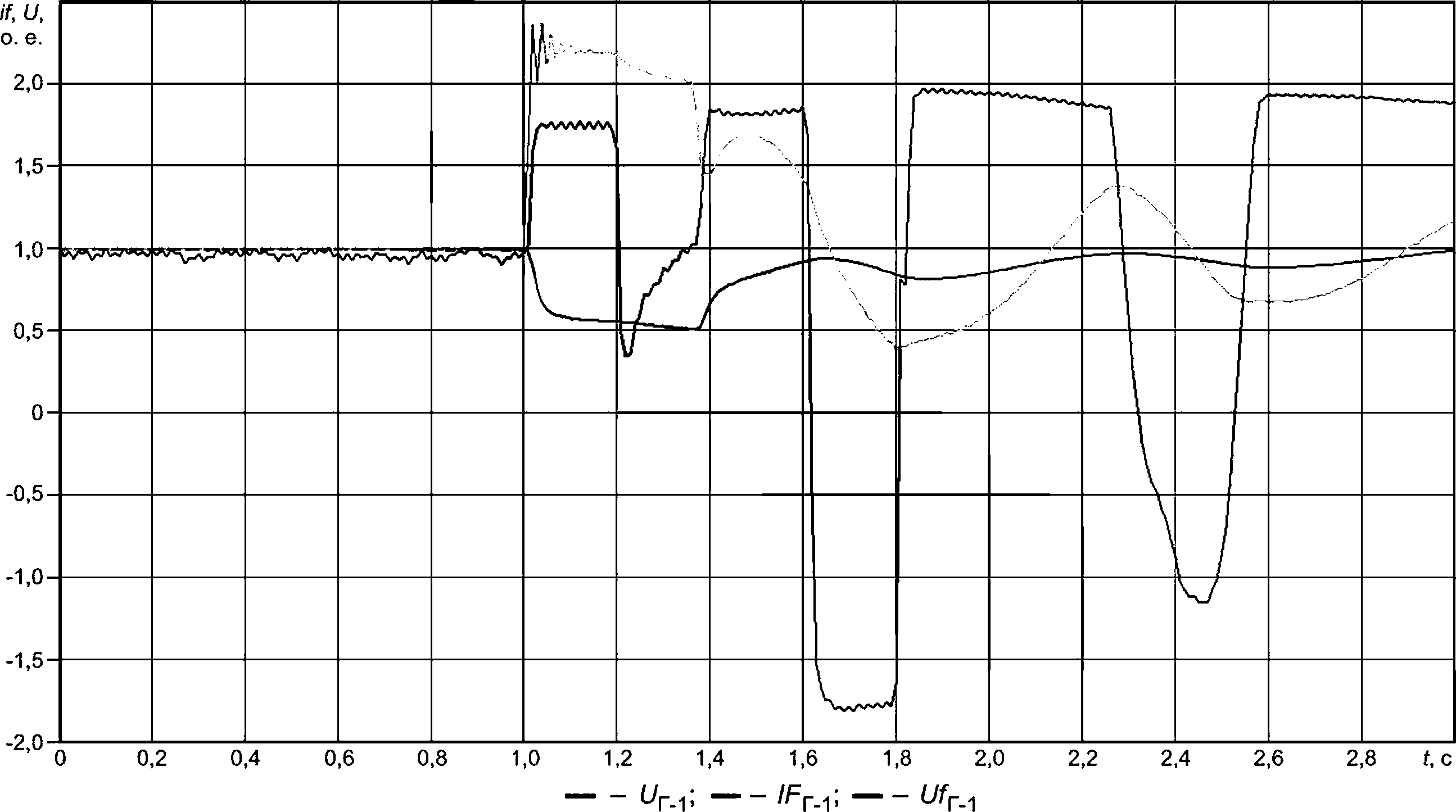
Примечание — Уставка ограничителя задана на уровне 2Мном.
Рисунок Г.37 — Корректная работа ограничителя двукратного тока ротора при моделировании затянувшегося двухфазного КЗ на землю
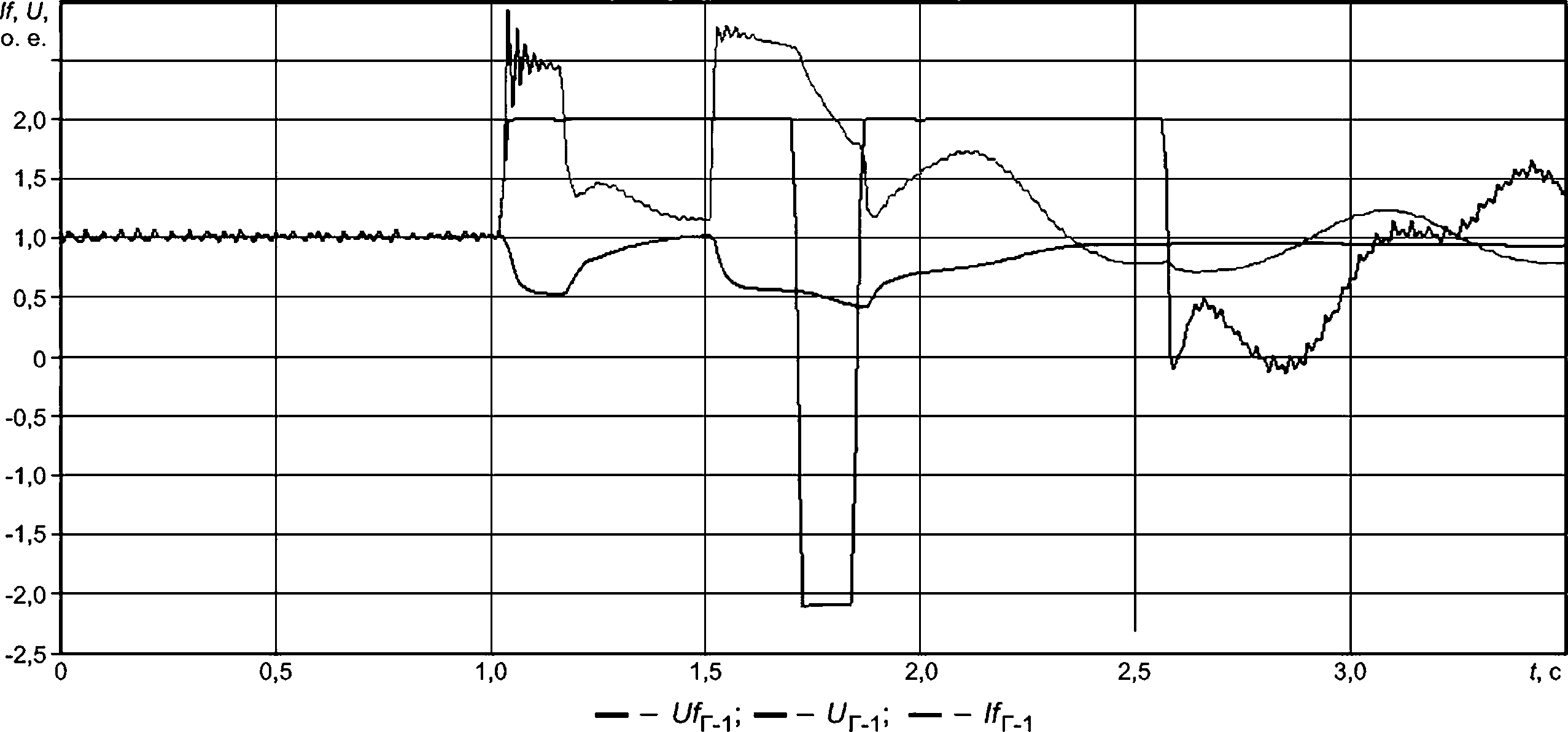
Примечание — Уставка ограничителя задана на уровне
Рисунок Г.38 — Корректная работа ограничителя двукратного тока ротора при моделировании серии из двух двухфазных КЗ на землю
Г.4.2.10 В экспериментах 78—88 выполняют проверку обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что она выполняется посредством подачи тестовых возмущений при:
- введенных и выведенных на обоих тестируемых АРВ сильного действия каналах стабилизации (включенном и выключенном системном стабилизаторе);
- введенных каналах стабилизации (включенном системном стабилизаторе) только на одном из АРВ сильного действия.
Критериями корректности работы АРВ сильного действия во всех экспериментах являются:
- устойчивость регулирования реактивной мощности и стабилизации режима при совместной работе двух регуляторов в составе укрупненного блока синхронных генераторов;
- корректность распределения реактивной мощности между синхронными генераторами, объединенными в одной точке на генераторном напряжении;
- отсутствие внутригрупповой неустойчивости;
- восстановление исходной загрузки синхронных генераторов по реактивной мощности после снятия тестовых возмущений;
- отсутствие возникновения и развития взаимных колебаний между синхронными генераторами при тестовых возмущениях.
График, характеризующий корректную работу АРВ сильного действия, приведен на рисунке Г.39.
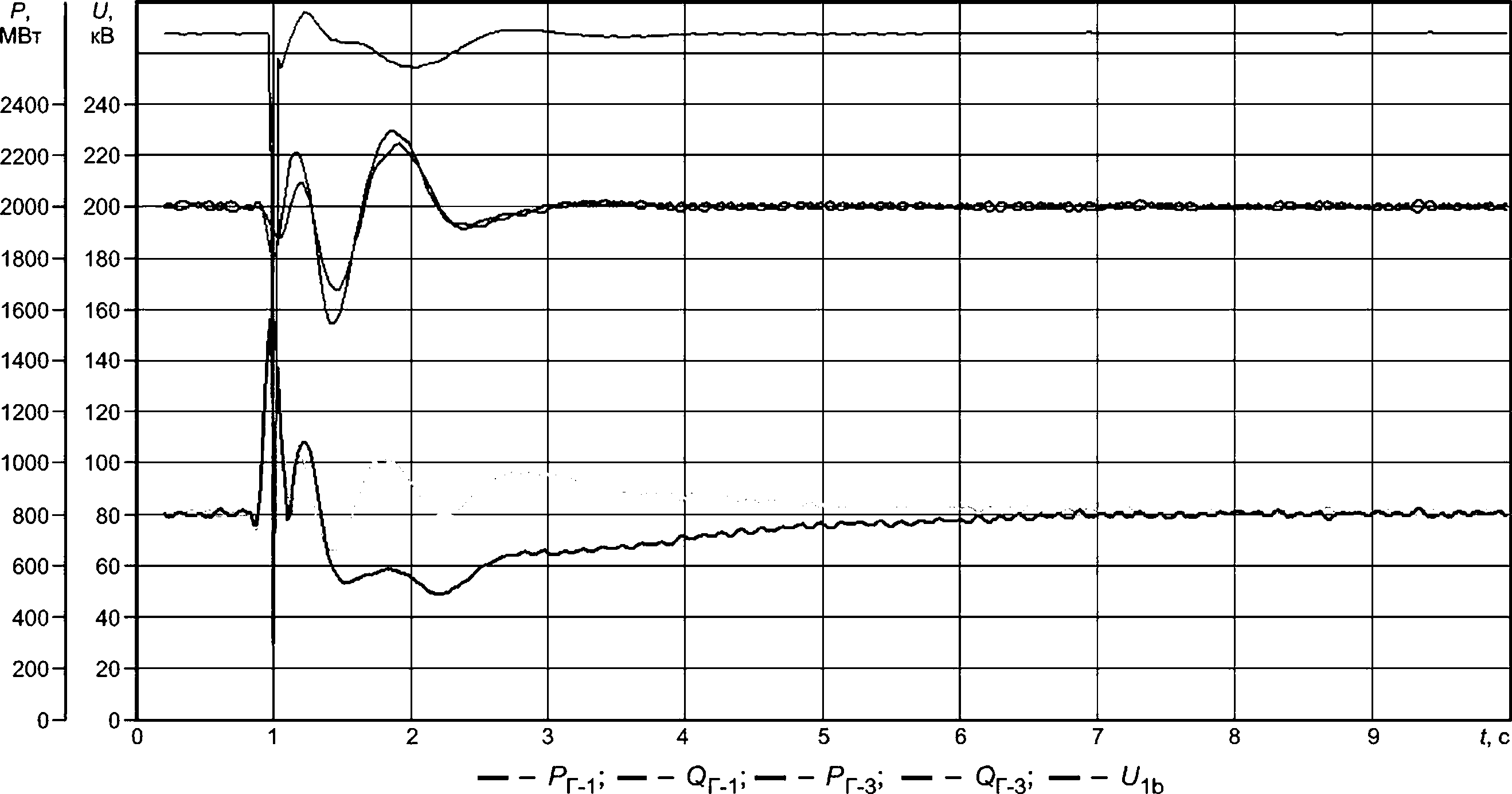
Рисунок Г.39 — Корректная работа АРВ сильного действия при однофазном КЗ на шинах электрической станции № 1 при совместной работе двух регуляторов в составе укрупненного блока синхронных генераторов
Г.4.2.11 В эксперименте 89 выполняют проверку корректности работы ограничителя напряжения ротора бесщеточного возбудителя.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что для исключения срабатывания ограничителя двукратного тока возбуждения бесщеточного возбудителя уставка этого ограничителя при проведении эксперимента 89 должна быть задана большей (в относительных единицах), чем уставка ограничителя напряжения ротора. Для АРВ сильного действия, в которых имеется ограничитель двукратного тока ротора, для предотвращения его срабатывания следует ввести максимальную задержку по времени на ввод этого ограничителя.
Критерий корректности работы ограничителя напряжения ротора: ограничение напряжения ротора должно осуществляться без перерегулирования.
График, характеризующий корректную работу ограничителя напряжения ротора при моделировании затянувшегося трехфазного КЗ на землю, приведен на рисунке Г.40.
Г.4.2.12 В эксперименте 90 выполняют проверку корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2). Особенностью проведения проверки является то, что для исключения срабатывания ограничителя напряжения ротора уставка этого ограничителя при проведении эксперимента 90 должна быть задана большей (в относительных единицах), чем уставка ограничителя тока возбуждения бесщеточного возбудителя. Для АРВ сильного действия, в которых имеется ограничитель двукратного тока ротора, для предотвращения его срабатывания следует ввести максимальную задержку по времени на ввод этого ограничителя.
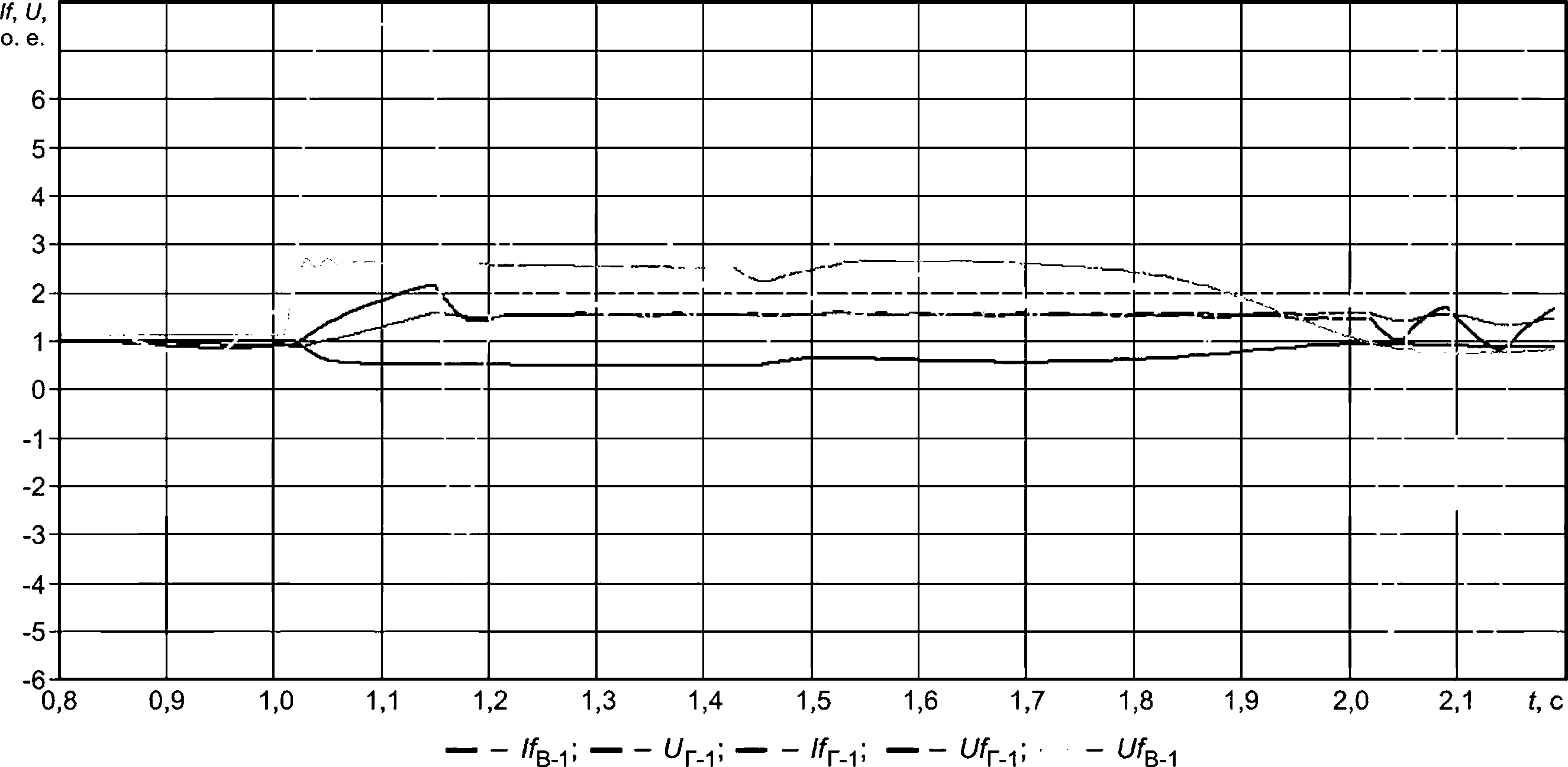
Примечание — Уставка ограничителя напряжения ротора задана на уровне 1,5t/fH0M (уставка ограничителя максимального тока возбуждения бесщеточного возбудителя задана на уровне 3/fH0M).
Рисунке Г.40 — Корректная работа ограничителя напряжения ротора при моделировании трехфазного затянувшегося КЗ вблизи шин электрической станции № 1
Критерий корректности работы двукратного тока возбуждения бесщеточного возбудителя: ограничение двукратного тока возбуждения бесщеточного возбудителя должно осуществляться без перерегулирования.
График, характеризующий корректную работу ограничителя двукратного тока возбуждения бесщеточного возбудителя при моделировании затянувшегося трехфазного КЗ на землю, приведен на рисунке Г.41.
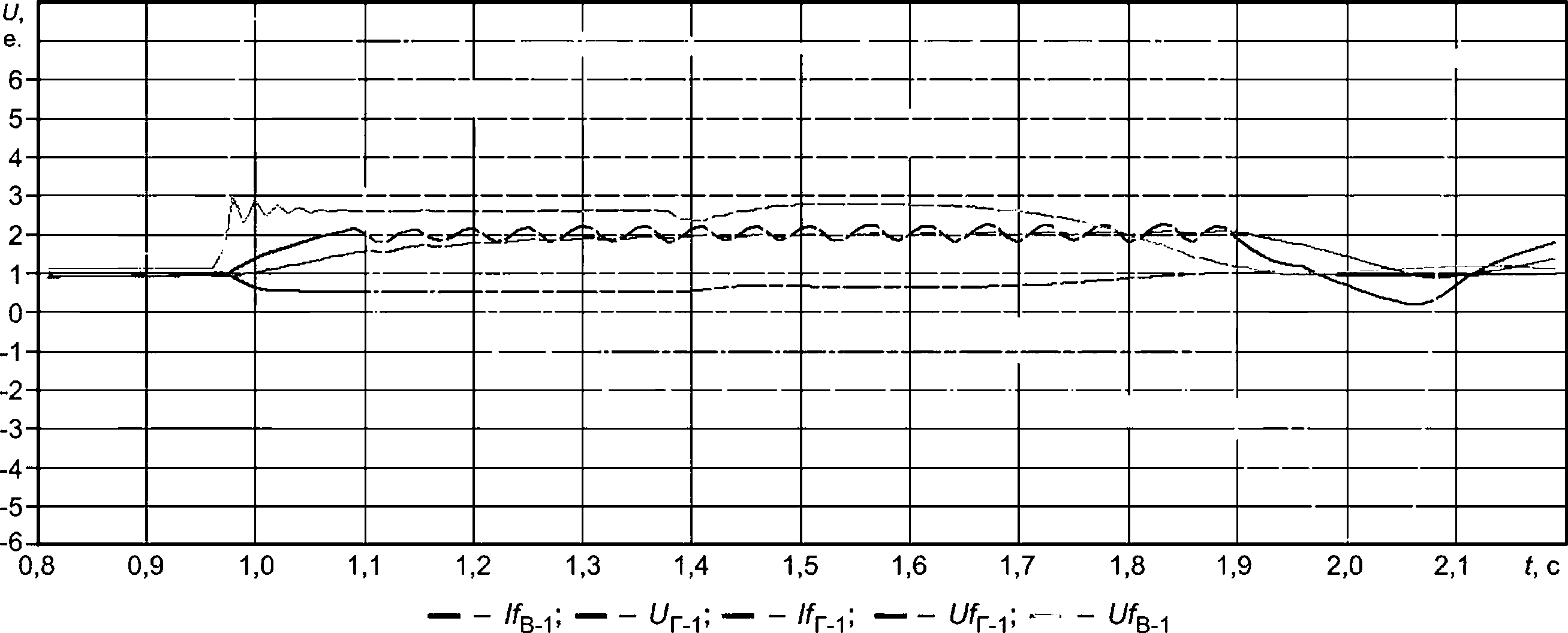
Примечание — Уставка ограничителя двукратного тока возбуждения бесщеточного возбудителя задана на уровне 2/fH0M (уставка ограничителя напряжения ротора задана на уровне 3L/fH0M).
Рисунок Г.41 — Корректная работа ограничителя двукратного тока возбуждения бесщеточного возбудителя при моделировании трехфазного затянувшегося КЗ вблизи шин электрической станции № 1
Г.4.2.13 В эксперименте 91 выполняют проверку корректности расчета тока ротора по диаграмме Потье.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Г.2).
Критерием корректности реализации алгоритма расчета тока ротора является: расчетное по диаграмме Потье значение тока ротора не должно отличаться от измеренного:
- по фазе — не более чем на 30°;
- по амплитуде — не более чем на 20 %.
График, характеризующий корректную работу АРВ сильного действия, на котором измеренное и расчетное по диаграмме Потье значения тока ротора фактически совпадают, приведен на рисунке Г.42.
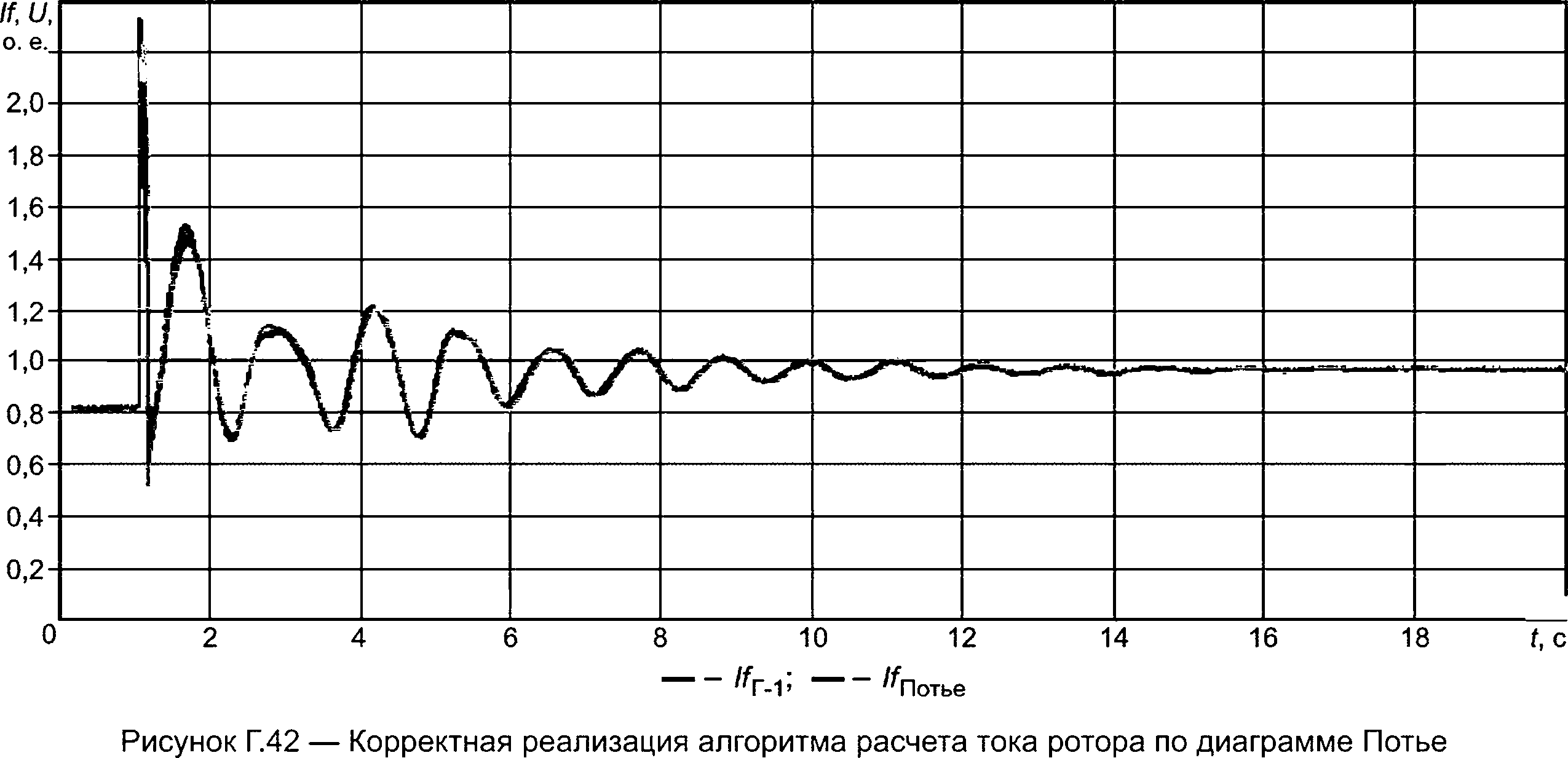
Приложение Д (обязательное)
Методика проведения испытаний АРВ сильного действия и алгоритмов их функционирования на математической модели энергосистемы с использованием ПАК РВ
Д.1 Этапы подготовки и проведения испытаний
Испытания АРВ сильного действия и алгоритмов их функционирования (далее — испытания) на математической модели энергосистемы должны предусматривать:
- разработку, настройку и подготовку математической модели энергосистемы (формирование математической модели);
- проведение испытаний;
- анализ результатов испытаний.
Д.2 Разработка, настройка и подготовка математической модели энергосистемы
Д.2.1 Общие положения
Д.2.1.1 Для проведения испытаний АРВ сильного действия должна быть создана математическая модель энергосистемы с использованием ПАК РВ (типа RTDS или иного типа). Использование ПАК РВ, отличного от RTDS типа, допустимо при реализации на нем переходных процессов и результатов испытаний, идентичных переходным процессам и результатам испытаний, полученным при использовании верифицированной системным оператором математической модели, созданной в ПАК РВ типа RTDS, или физической модели энергосистемы (далее по тексту настоящего раздела указанные ПАК РВ совместно именуются RTDS).
При использовании для создания математической модели энергосистемы ПАК РВ, отличного от RTDS типа, определение идентичности переходных процессов и результатов испытаний (далее — верификация математической модели) выполняется системным оператором.
Для верификации математической модели организация, проводящая испытания, должна:
а) предоставить системному оператору основные данные о математической модели энергосистемы, созданной с применением ПАК РВ, содержащие:
1) сведения об аппаратной части ПАК РВ, включающие:
- количество и тип вычислительных процессорных плат, выполняющих функции расчета в режиме реального времени;
- количество и тип устройств аналогового вывода, ввода, дискретного вывода, ввода с указанием количества каналов этих устройств и основных характеристик их входных или выходных сигналов;
- количество и тип устройств, выполняющих преобразование (усиление) аналоговых сигналов с указанием количества каналов этих устройств и основных характеристик их входных или выходных сигналов;
2) сведения о предлагаемых схемах подключения АРВ сильного действия к аппаратной части ПАК РВ с указанием взаимосвязей физических входных и выходных сигналов и их предназначения в математической модели энергосистемы, реализованной в ПАК РВ;
3) сведения о математической модели энергосистемы, включающие описание:
- схемы (набора схем с указанием их количества) математической модели энергосистемы;
- возможностей выполнения переключений и моделирования схемно-режимных условий;
- элементов, посредством которых выполняется моделирование действия устройств релейной защиты и автоматики;
- элементов, выполняющих измерения параметров электроэнергетического режима для устройств регулирования и для регистрации;
- системы регистрации параметров электроэнергетического режима;
б) провести с использованием созданной математической модели энергосистемы эксперименты (из числа экспериментов, указанных в таблице Д.1) в отношении АРВ сильного действия, ранее с положительным результатом прошедшего испытания на другой верифицированной математической модели энергосистемы, созданной с использованием RTDS, и представить результаты таких экспериментов системному оператору для верификации математической модели.
Д.2.1.2 Применяемый ПАК РВ должен обеспечивать точное моделирование работы указанного в описании математической модели электрооборудования при исследованиях электромеханических переходных процессов, при этом комплекс должен обеспечивать:
- возможность расчета математической модели с количеством однофазных узлов не менее 30;
- наличие устройств выдачи аналоговых сигналов при работе с усилителями, осуществляющими выдачу напряжений (диапазон не менее ±130 В, 12 шт.; не менее ±50 В, 1 шт.) и токов (динамический диапазон не менее ±40 А, 6 шт., ±5 А, 1 шт.), наличие усилителей тока и напряжения работающих на основе входного сигнала или устройства выдачи токов и напряжения работающих на основе цифровых интерфейсов;
- наличие устройств выдачи дискретных команд типа «сухой контакт» для приема не менее 12 сигналов (импульсы управления моделями тиристоров СВ);
- шаг расчета не более 100 мкс с возможностью моделирования системы возбуждения СГ с шагом не более 5 мкс5;
- моделирование систем управления (АРВ);
- сбор информации (система измерений) и осциллографирование;
- моделирование электромеханических и электромагнитных процессов в электроэнергетических системах.
Д.2.1.3 Математическая модель энергосистемы должна быть разработана в программном обеспечении RTDS и содержать:
- модели синхронных генераторов, трансформаторов, ЛЭП, комплексных нагрузок6, конденсаторных батарей, реакторов, ШНН, АРВ, СВ, регуляторов скорости, турбин;
- элементы, обеспечивающие ручное управление мощностью и возбуждением генераторов;
- элементы, обеспечивающие моделирование действия устройств и комплексов релейной защиты и автоматики;
- элементы, обеспечивающие контроль и регистрацию параметров электроэнергетического режима.
Математическая модель энергосистемы должна позволять:
- воспроизводить схемно-режимные условия, указанные на рисунках Д.1—Д.18. При использовании одной математической модели она должна иметь возможность выполнения необходимых для воспроизведения указанных схемно-режимных условий переключений. При использовании набора математических моделей состав элементов, входящих в модели, следует определять исходя из расположения коммутационных аппаратов (см. рисунок Д.19). При необходимости уменьшения вычислительного оборудования, требуемого для создания схемы, замещение трансформаторов, работающих в режиме холостого хода, необходимо выполнять статическими шунтами, параметры которых определяются на основании параметров трансформаторов. Эквивалентность преобразований должна быть подтверждена посредством проверки соответствия параметров электроэнергетического режима математической модели до и после замещения элементов статическими шунтами;
- при испытаниях АРВ сильного действия, работающих в составе БСВ, воспроизводить все эксперименты программы испытаний, указанные в таблице Д.1;
- при испытаниях АРВ сильного действия, работающих в составе статических СВ, воспроизводить все эксперименты программы испытаний, указанные в таблице Д.1, за исключением экспериментов 89—91;
- подключать испытуемый АРВ сильного действия в соответствии с документацией изготовителя к элементам RTDS, реализующим полную имитацию подключения АРВ сильного действия непосредственно к натурному генератору и его СВ.
Таблица Д.1 — Минимально необходимый объем испытаний АРВ сильного действия и алгоритма его функционирования
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
1 | Схема 1 | Режим 1 (^Г-1_1 = РГном; $Г-1_1 = $Гном) | Тестовое возмущение 1 | Проверка эффективности настройки каналов стабилизации (системного стабилизатора) | Введен |
2 | Выведен | ||||
3 | Тестовое возмущение 2 | Введен | |||
4 | Выведен | ||||
5 | Тестовое возмущение 3 | Введен | |||
6 | Выведен | ||||
7 | Режим 2 (^Г-1_1 = °’5^Гном; $Г-1_1 = $Гном) | Тестовое возмущение 1 | Введен | ||
8 | Выведен | ||||
9 | Тестовое возмущение 2 | Введен | |||
10 | Выведен | ||||
11 | Тестовое возмущение 3 | Введен | |||
12 | Выведен |
Продолжение таблицы Д. 1
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
13 | Режим 3 (^Г-1_1 = °>5/:гном: $Г-1_1 = “°’1$Гном) | Тестовое возмущение 1 | Введен | ||
14 | Выведен | ||||
15 | Тестовое возмущение 2 | Введен | |||
16 | Выведен | ||||
17 | Тестовое возмущение 3 | Введен | |||
18 | Выведен | ||||
19 | Схема 2.1 | Режим 4 | Увеличение перетока по линии Л-1 за счет увеличения мощности Г-1_1 до нарушения устойчивости | Проверка апериодического характера нарушения статической устойчивости | Введен |
20 | Выведен | ||||
21 | Схема 2.2 | Увеличение перетока по линии Л-3 за счет увеличения мощности Г-1_1 до нарушения устойчивости | Введен | ||
22 | Выведен | ||||
23 | Схема 3 | Режим 5 (РГ-1_1 ~ ^Г-1_2 “ ~ ^Гном) | Тестовое возмущение 1 | Проверка качества стабилизации режима и проверку отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 — испытуемый АРВ, а на Г-1_2 — регулятор типа АРВ-СД) | На АРВ Г-1_1 и АРВ Г-1_2 введен |
24 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | ||||
25 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
26 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
27 | Тестовое возмущение 2 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | |||
28 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
29 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
30 | На АРВ Г-1_1 и АРВ Г-1_2 введен | ||||
31 | Режим 6 (^Г-1_1 = ^Гном; ^Г-1_2 ~ °’5РГном) | Тестовое возмущение 1 | На АРВ Г-1_1 и АРВ Г-1_2 введен | ||
32 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен |
Продолжение таблицы Д. 1
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
33 | Схема 3 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | |||
34 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
35 | Режим 7 (^Г-1_1 = °’5^Гном: ^Г-1_2 = ^Гном) | Тестовое возмущение 2 | На АРВ Г-1_1 введен; на АРВ Г-1_2 выведен | ||
36 | На АРВ Г-1_1 выведен; на АРВ Г-1_2 введен | ||||
37 | На АРВ Г-1_1 и АРВ Г-1_2 выведен | ||||
38 | На АРВ Г-1_1 и АРВ Г-1_2 введен | ||||
39 | Режим 8 | Отключение линии Л-2 | Проверка качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ | Введен | |
40 | Выведен | ||||
41 | Однофазное КЗ вблизи шин ЭС № 1 с успешным ОАПВ линии Л-21) | Введен | |||
42 | Выведен | ||||
43 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с успешным ТАПВ линии Л-2 | Введен | |||
44 | Выведен | ||||
45 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Введен | |||
46 | Выведен | ||||
47 | Однофазное КЗ вблизи шин ЭС № 1 с неуспешным ОАПВ линии Л-2 | Введен | |||
48 | Выведен | ||||
49 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с неуспешным ТАПВ линии Л-2 | Введен | |||
50 | Выведен | ||||
51 | Отключение линии Л-2 действием УРОВ при двухфазном КЗ на землю вблизи шин ЭС № 1 с отказом фазы выключателя | Введен | |||
52 | Выведен |
Продолжение таблицы Д. 1
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
53 | Схема 4 | Режим 9 | Аварийное отключение нагрузки в приемной энергосистеме — отключение нагрузки на ЭС № 2 (частота в послеаварийном режиме 50,5 Гц) | Проверка корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока | Введен2) |
54 | Введен3) | ||||
55 | Выведен | ||||
56 | Режим 10 | Аварийное отключение генератора в приемной энергосистеме — отключение генератора на ЭС № 3 (частота в послеаварийном режиме 49,5 Гц) | Введен2) | ||
57 | Введен3) | ||||
58 | Выведен | ||||
59 | Схема 5 | Режим 11 | Аварийное отключение генератора в приемной энергосистеме — отключение генератора на ЭС № 2 (частота в послеаварийном режиме 49,5 Гц) | Введен2) | |
60 | Введен3) | ||||
61 | Выведен | ||||
62 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Введен2) | |
63 | Введен3) | ||||
64 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Проверка корректности работы функции релейной форсировки возбуждения в режимах, близких к предельным | Введен |
65 | Выведен | ||||
66 | Режим 12 снижение мощности ЭС № 2 до неустойчивого перехода4^ | Введен | |||
67 | Выведен | ||||
68 | Схема 3 | Режим 13 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 и отключением от ПА Г-1_2 | Проверка обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА | Введен |
69 | Выведен | ||||
70 | Схема 3 | Режим 14 | Медленное увеличение напряжения Ur ЭС. Вход в зону ОМВ | Проверка корректности работы ОМВ | Введен |
71 | Медленное снижение напряжения Ur ЭС. Выход из зоны ОМВ | Введен |
Продолжение таблицы Д. 1
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
72 | Медленное увеличение активной мощности генератора ЭС № 1 до входа в зону ОМ В | Введен | |||
73 | Скачкообразное увеличение напряжения на шинах 500 кВ ЭС № 1 (подключение емкостной нагрузки). Вход в зону ОМ В | Введен | |||
74 | Скачкообразное снижение напряжения на шинах 500 кВ ЭС № 1 (отключение емкостной нагрузки). Выход из зоны ОМ В | Введен | |||
75 | Схема 6 | Режим 15 | Ступенчатое увеличение уставки АРВ сильного действия Г-1_1 по напряжению генератора5) | Проверка корректности работы ограничителя двукратного тока ротора | Введен |
76 | Двухфазное затянувшееся КЗ (длительностью 0,4 с) на землю вблизи шин ЭС № 1 | Введен | |||
77 | Серия из двух двухфазных последовательных КЗ на землю вблизи шин ЭС № 16) | Введен | |||
78 | Схема 7 | Режим 16 (РГ-1_1 = ^Г-1_3 = = Р ) ' НОМ/ | Тестовое возмущение 1 (на АРВ Г-1_1) | Проверка обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока | На АРВ Г-1_1 и АРВ Г-1_3 введен |
79 | Тестовое возмущение 2 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
80 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
81 | Тестовое возмущение 3 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
82 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
83 | Отключение Г-1_3 | На АРВ Г-1_1 введен |
Окончание таблицы Д. 1
№ эксперимента | Вид схемы | Режим | Вид возмущения или утяжеления электроэнергетического режима | Цель проверки | Состояние каналов стабилизации (системного стабилизатора) |
84 | Режим 17 (РГ-1_1 = ^Гном: ^Г-1_3 - °’5РГном) | Тестовое возмущение 1 (на АРВ Г-1_1) | На АРВ Г-1_1 и АРВ Г-1_3 введен | ||
85 | Тестовое возмущение 2 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
86 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
87 | Тестовое возмущение 3 | На АРВ Г-1_1 и АРВ Г-1_3 введен | |||
88 | На АРВ Г-1_1 выведен; на АРВ Г-1_3 введен | ||||
89 | Схема 6 | Режим 15 | Трехфазное затянувшееся КЗ (длительностью 0,35 с) на землю вблизи шин ЭС № 1 | Проверка корректности работы ограничителя напряжения ротора бесщеточного возбудителя | Введен |
90 | Трехфазное затянувшееся КЗ (длительностью 0,35 с) на землю вблизи шин ЭС № 1 | Проверка корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя | Введен | ||
91 | Схема 3 | Режим 12 | Двухфазное КЗ на землю вблизи шин ЭС № 1 с отключением линии Л-2 | Проверка корректности расчета тока ротора по диаграмме Потье7) | Введен |
1) Здесь и далее под понятием «КЗ вблизи шин ЭС № 1» понимают КЗ в точке присоединения линии Л-2 (Л-5) к шинам электрической станции № 1.
2) Блокировка каналов стабилизации (системного стабилизатора) при изменении частоты введена.
3) Блокировка каналов стабилизации (системного стабилизатора) при изменении частоты выведена.
4) Снижение мощности электрической станции № 2 составляет порядка 350 МВт.
5) Значение ступенчатого изменения уставки задано максимальным в пределах реализованного диапазона изменения уставки АРВ сильного действия, но не более 30 % номинального напряжения статора. Задаваемая уставка ограничителя тока ротора согласована со значением ступенчатого изменения уставки, но не может быть ниже, чем 1,05//^
6) Время между КЗ 0,3 с, длительность повторного КЗ составляет 0,35 с.
7) Для АРВ сильного действия, в которых ток ротора, рассчитанный по диаграмме Потье, используют для формирования параметра стабилизации.
ЭС № 1
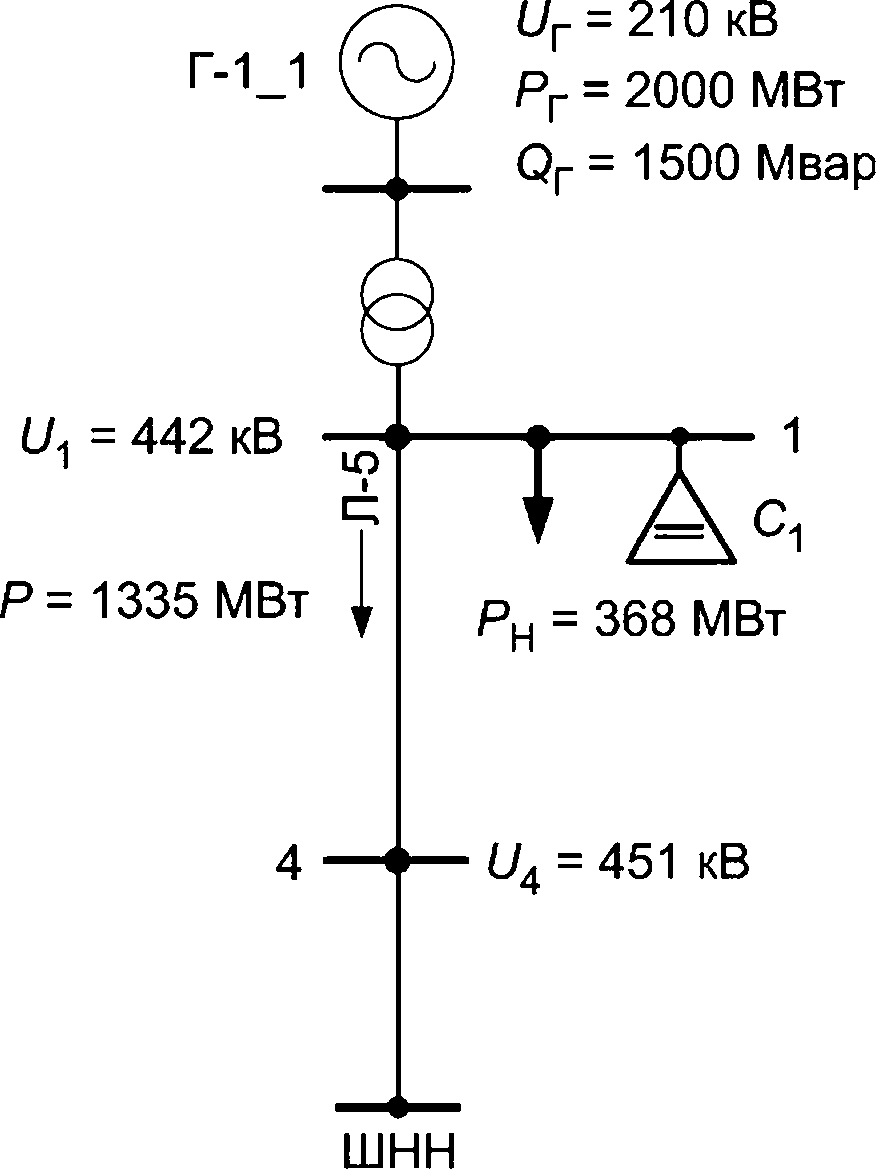
Рисунок Д.1 —Схема 1. Режим 1

Рисунок Д.2 — Схема 1. Режим 2
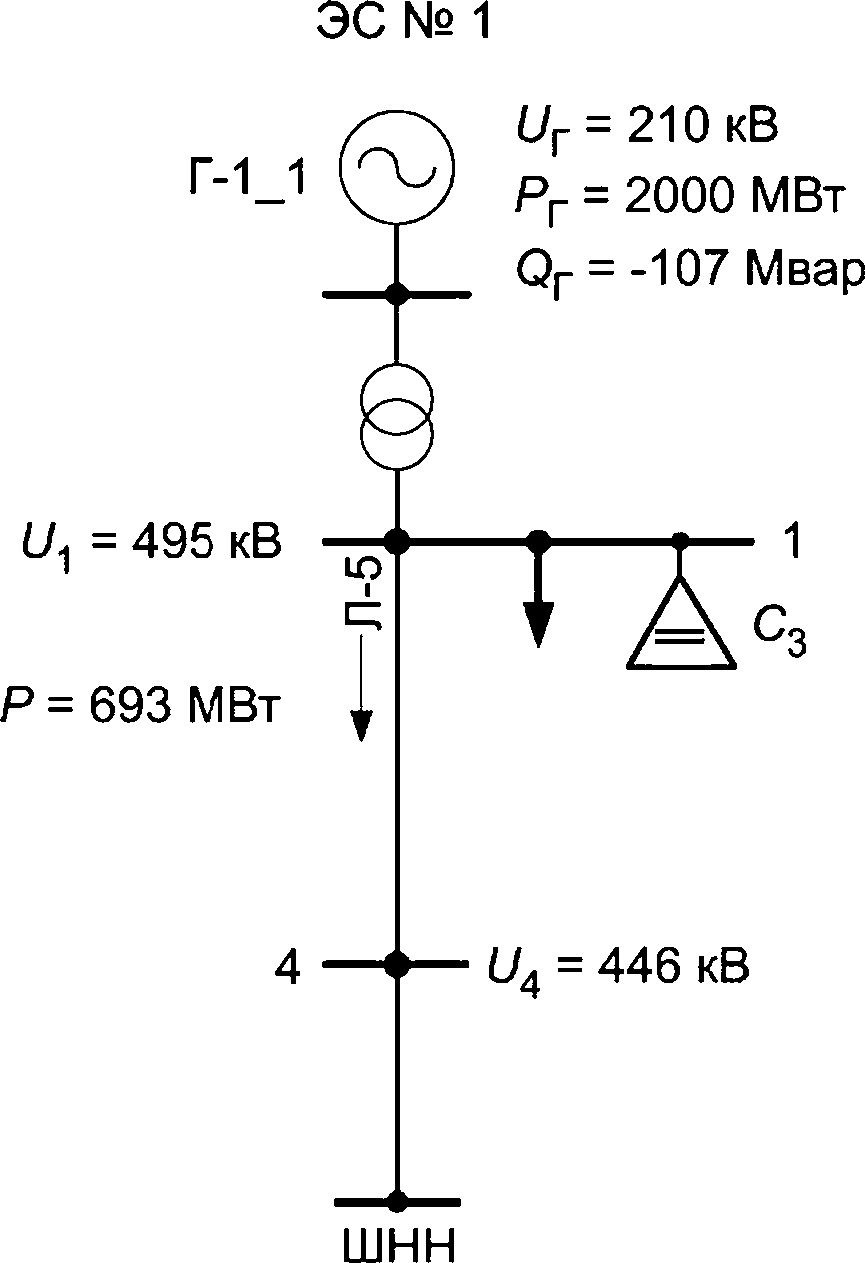
Рисунок Д.З — Схема 1. Режим 3
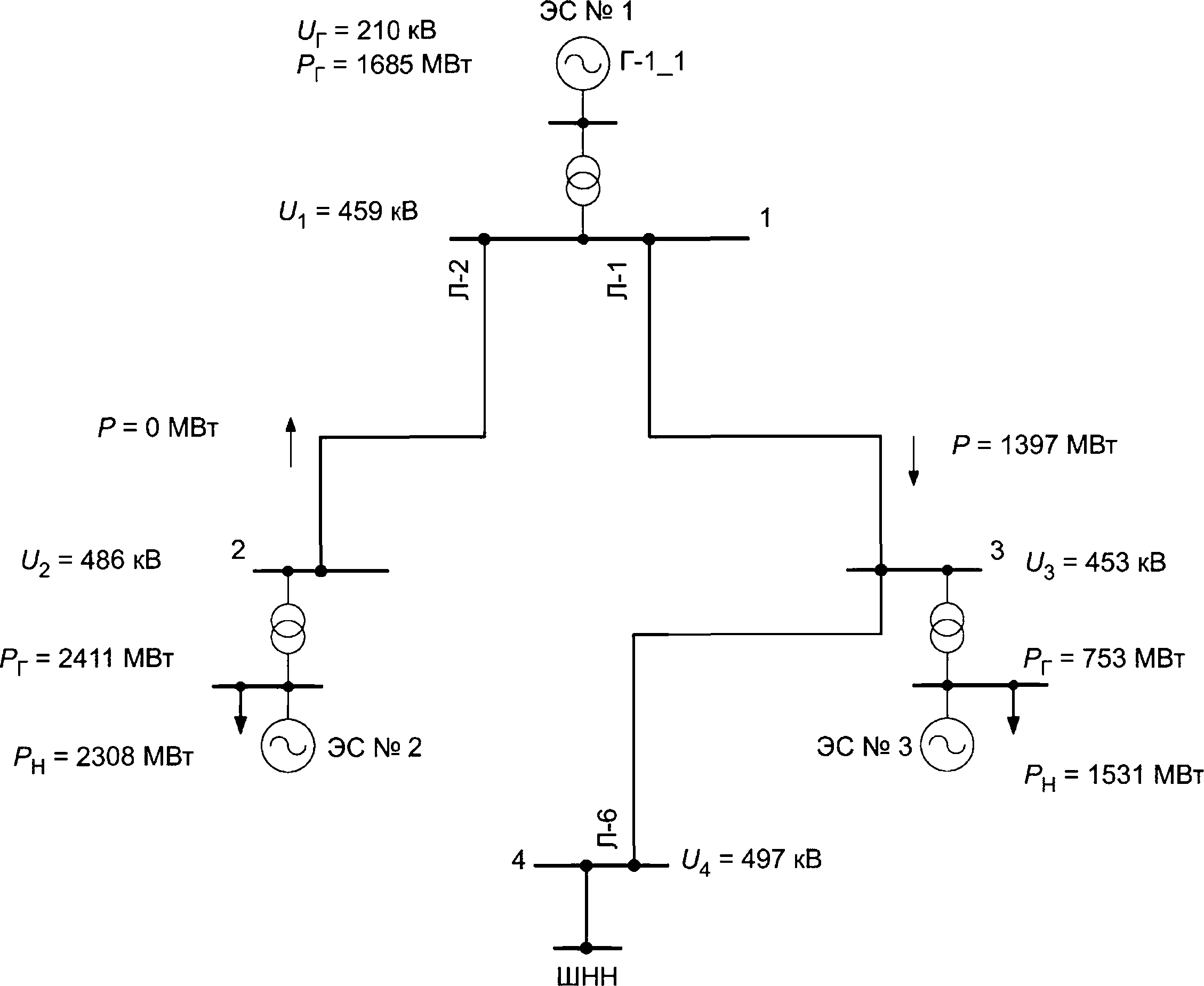
Рисунок Д.4 — Схема 2.1. Режим 4
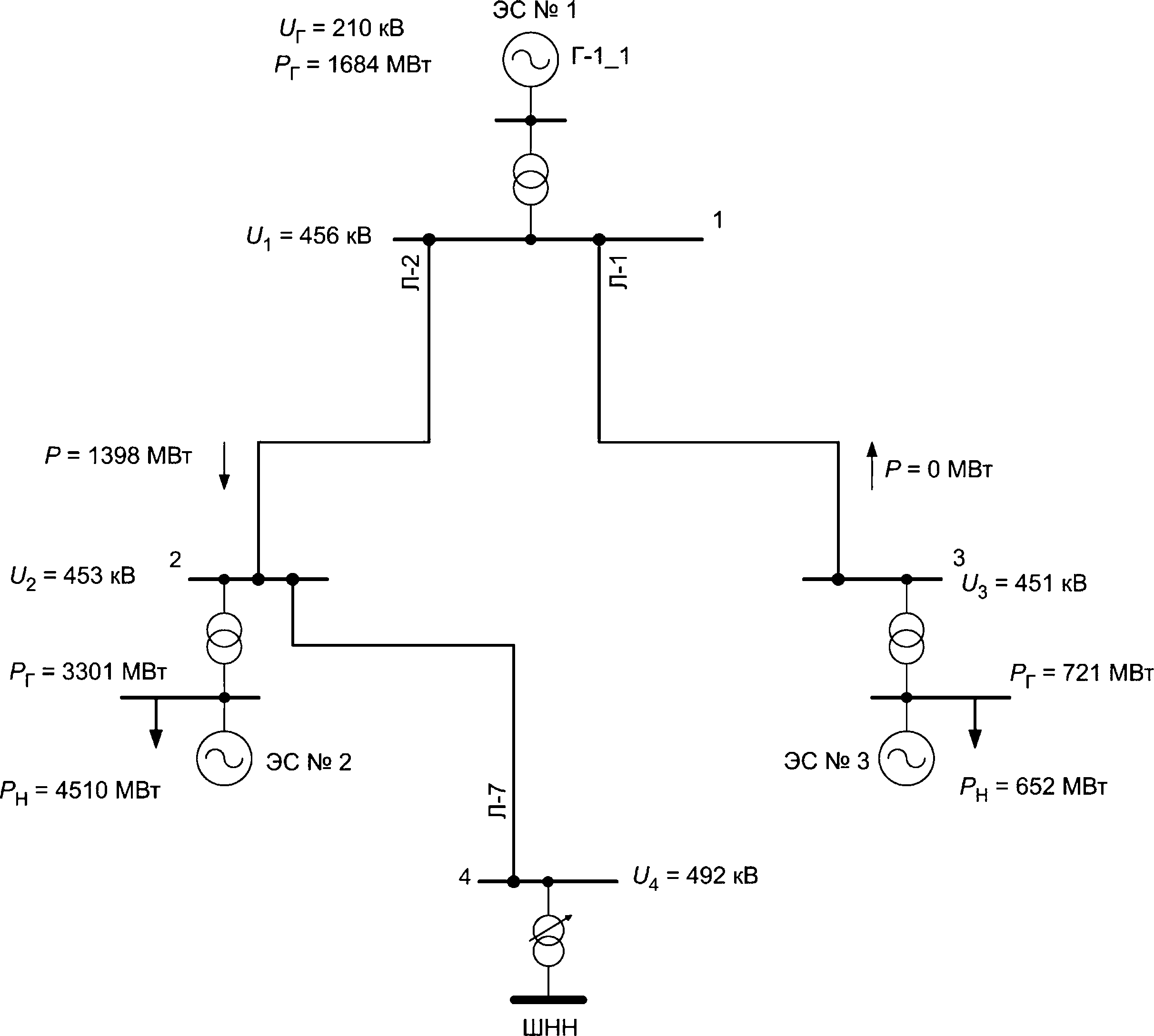
Рисунок Д.5 — Схема 2.2. Режим 4
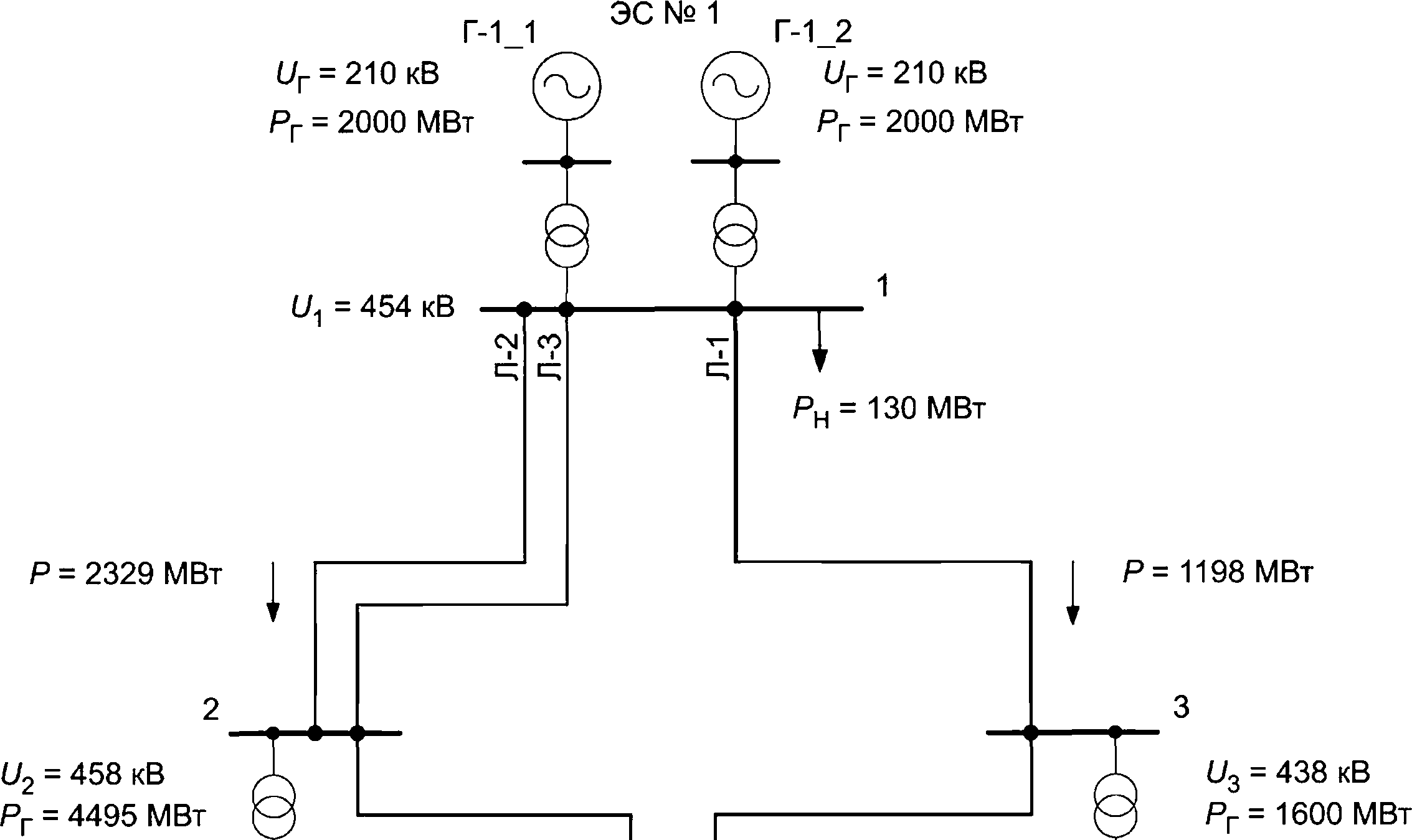
i л ЭС № 2 Рн = 4493 МВт | Л * ЭС № 3 Ы V V Рн = 1600 МВт со CZ с; 4 1 1 U4 = 459 кВ ШНН Рисунок Д.6 — Схема 3. Режим 5 |
С/г = 210кВ Ц- = 2ЮкВ
Рг = 2000 МВт рг = Ю00 МВт
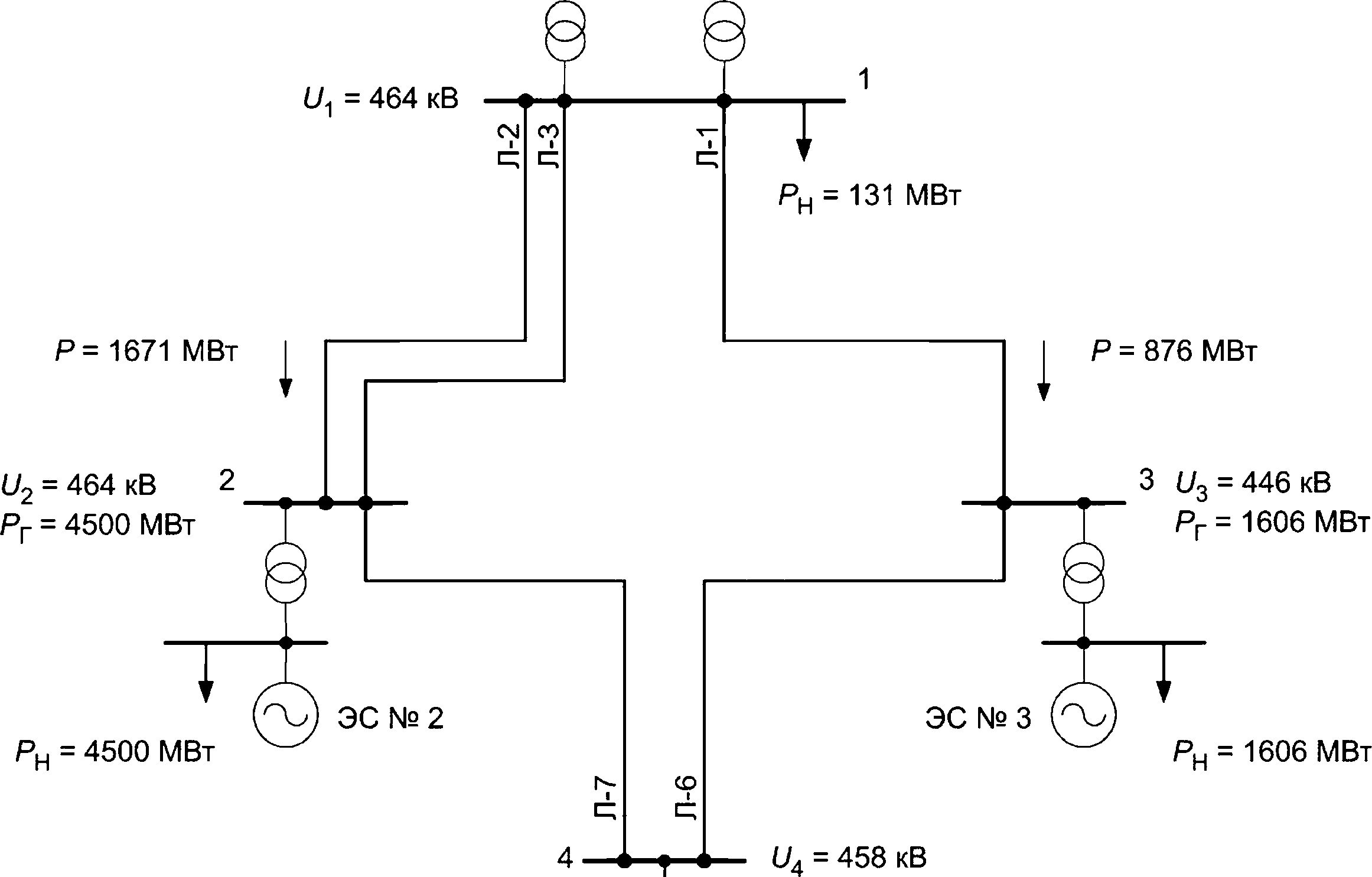
ШНН
Рисунок Д.7 — Схема 3. Режим 6
Г-1 1 1/г = 210 кВ Рг= 1000 МВт
ЭС № 1 м 2
Ur = 210 кВ Рг= 2000 МВт
U1 = 463 кВ
Рн = 131 МВт
Р= 1669 МВт
Р = 875 МВт
U2 = 464 кВ 2
Рг = 4500 МВт
3 U3 = 446 кВ Рг= 1606 МВт
Рн = 4500 МВт
ЭС №2
ЭС №3
Рн = 1606 МВт
U4 = 458 кВ
ШНН
Рисунок Д.8 — Схема 3. Режим 7
ЭС № 1
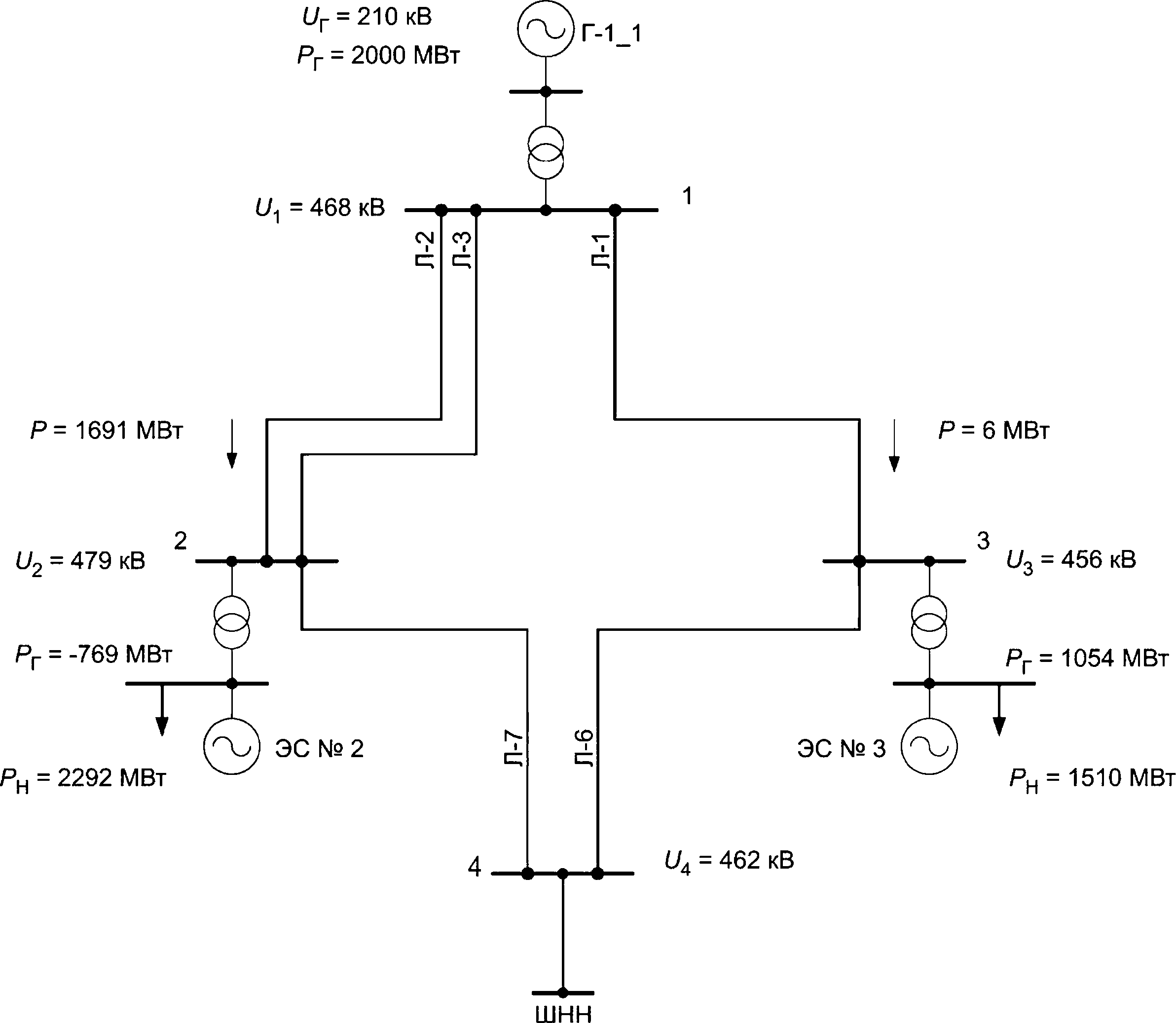
Рисунок Д.9 — Схема 3. Режим 8
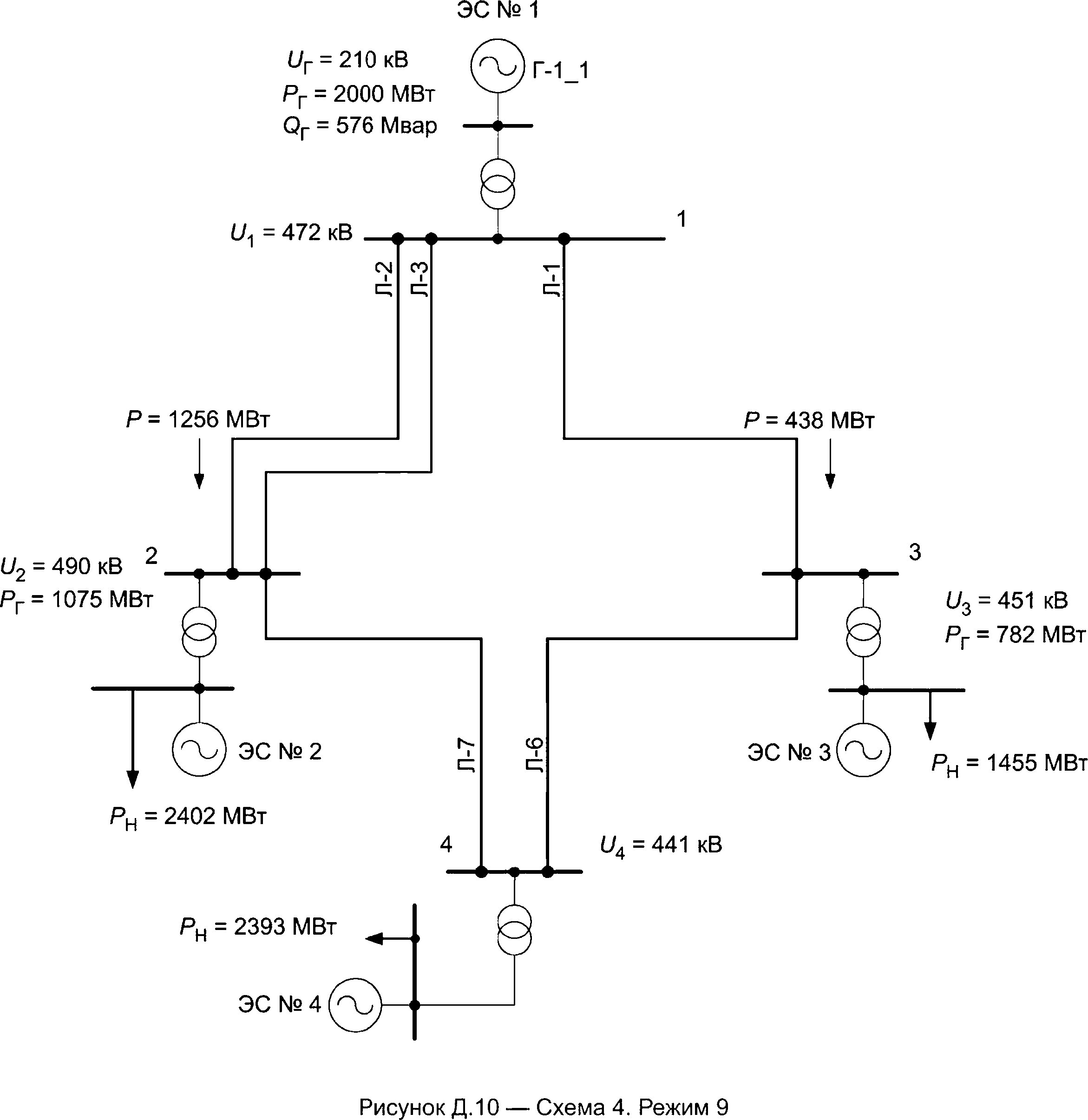
Щ = 473 кВ
ЭС № 1
Ц- = 210кВ
Рг = 2000 МВт
Qr = 547 Мвар
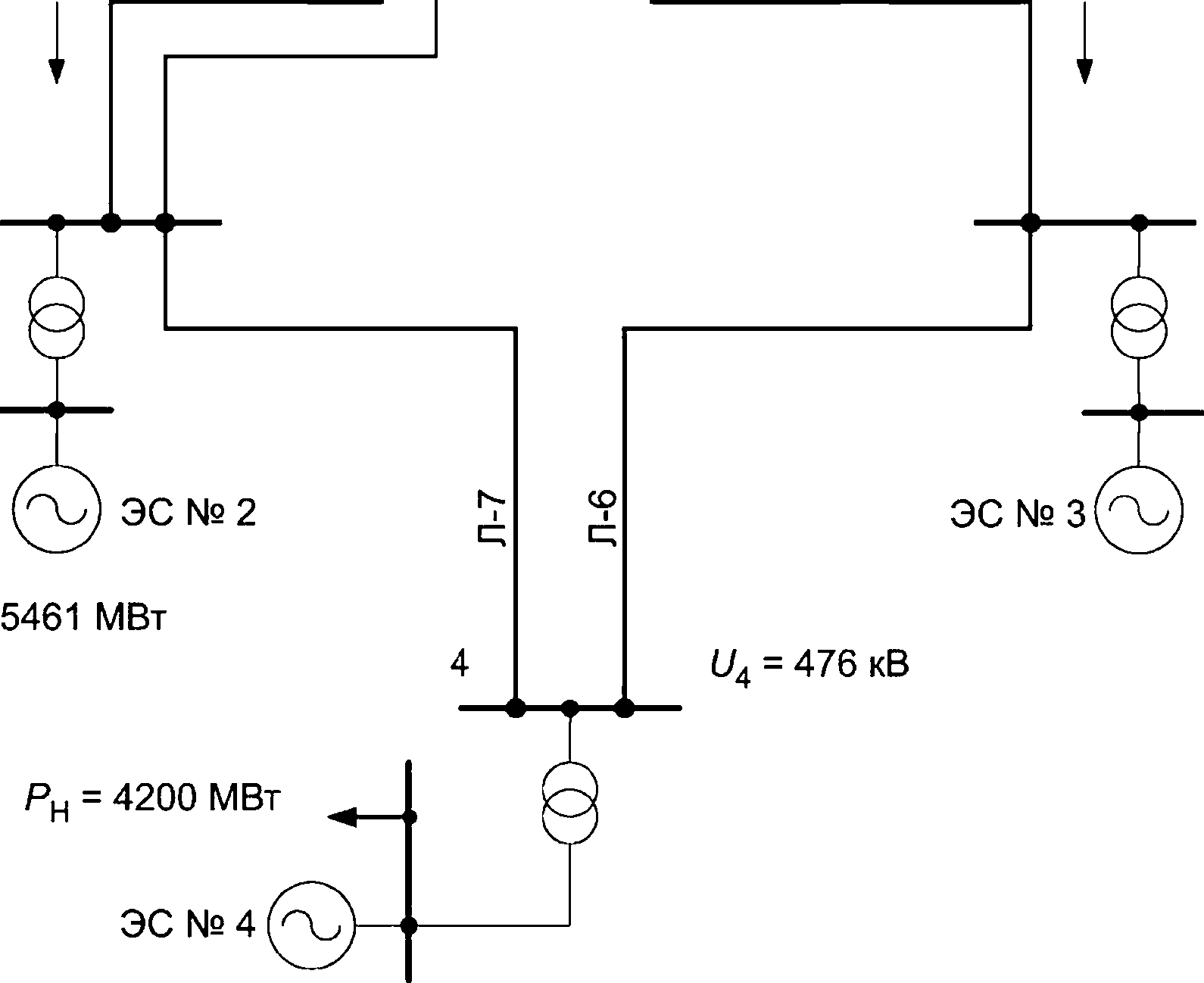
U3 = 441 кВ
Рг = 2000 МВт
Рисунок Д. 11 —Схема 4. Режим 10
ЭС № 1
Г-1_1
Ur = 210 кВ
Рг = 2000 МВт
Qr = 311 Мвар
Г-12
Ur = 211 кВ
Рг = 0 МВт
Qr = 652 Мвар
Щ = 480 кВ
Р = 506 МВт
с;
Р = 1174 МВт
U2 = 493 кВ
Рг = 2768 МВт
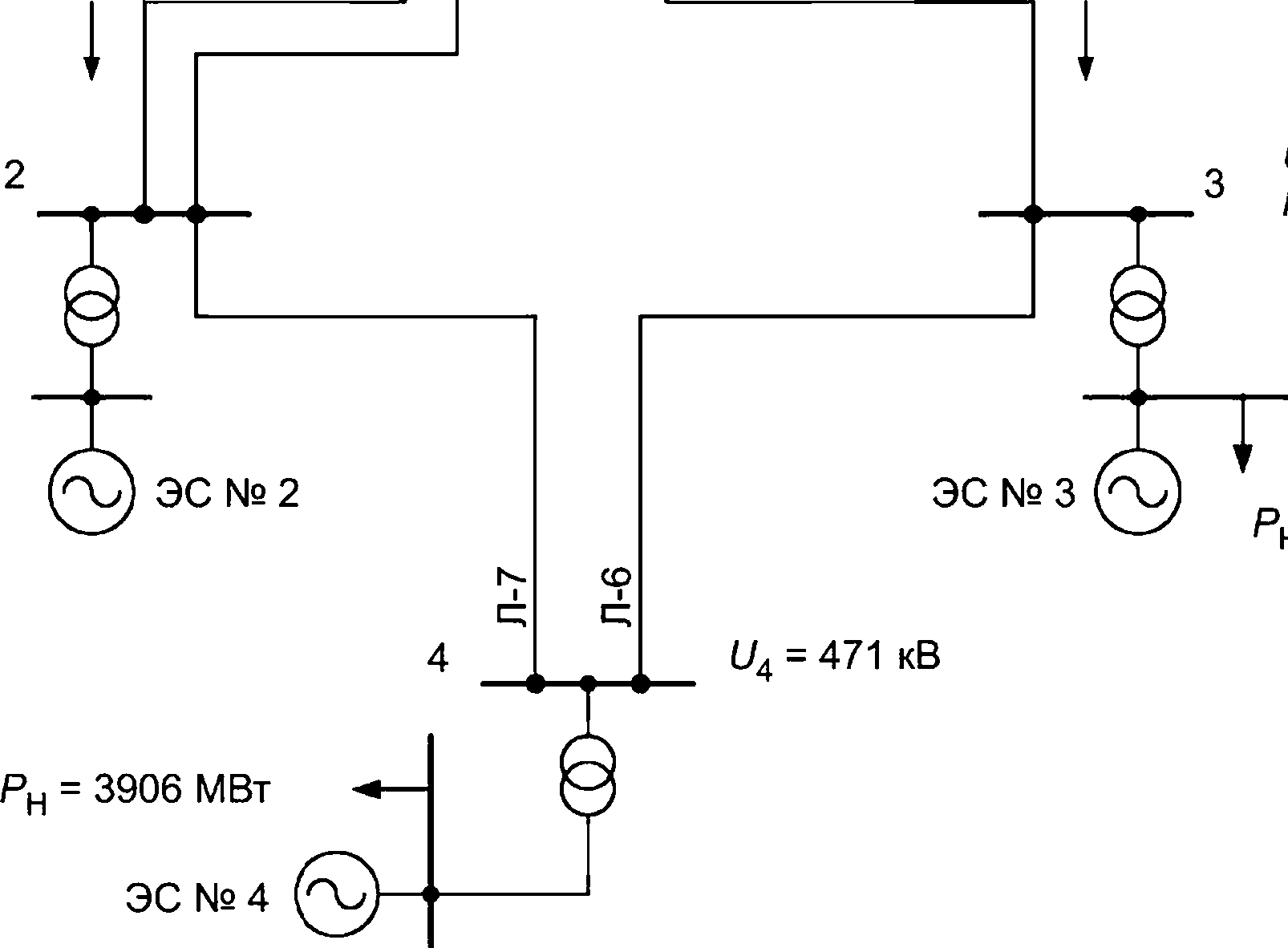
/3 = 449 кВ
>г = 721 МВт
= 842 МВт
Рисунок Д. 12 — Схема 5. Режим 11
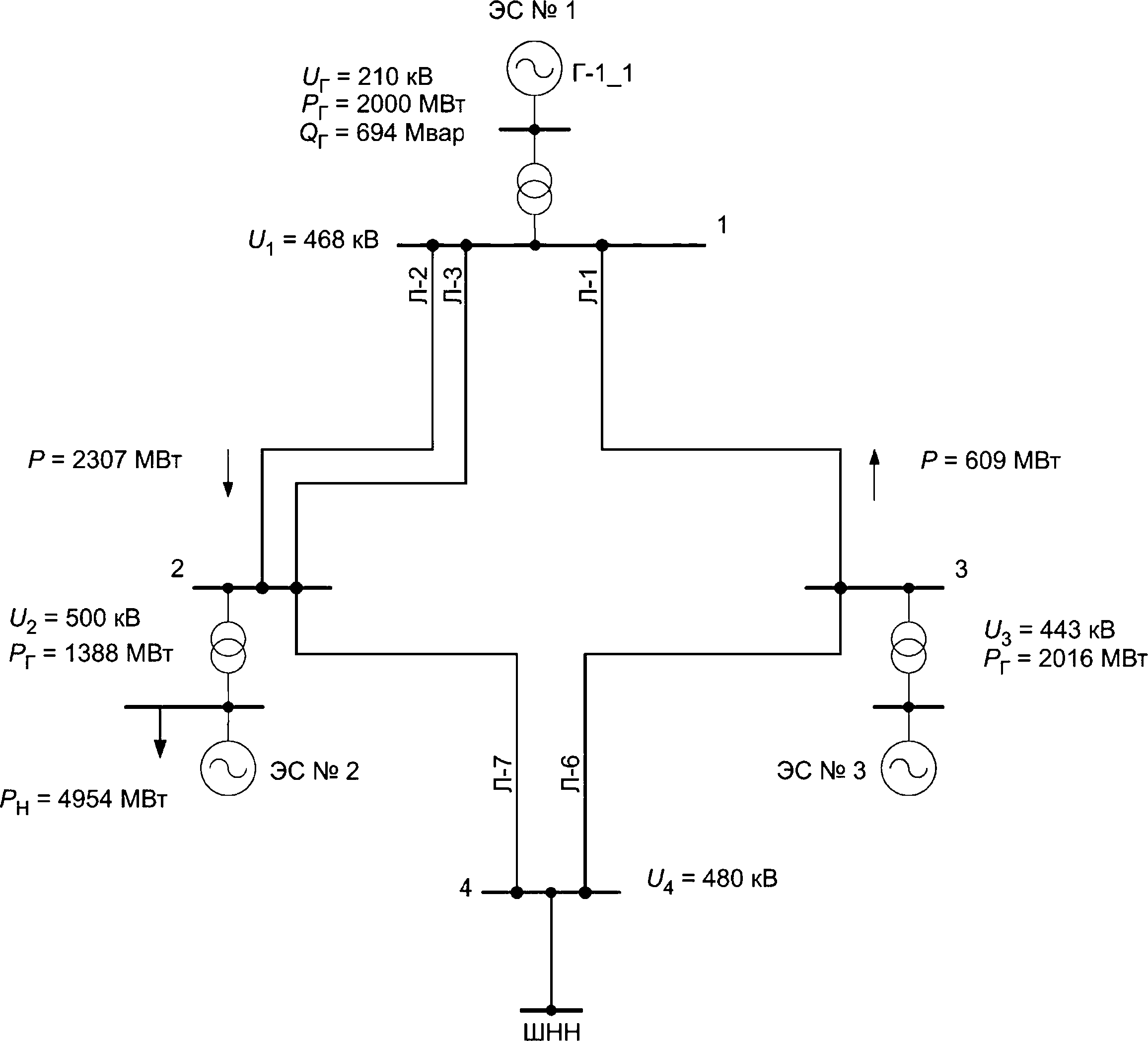
Рисунок Д. 13 — Схема 3. Режим 12
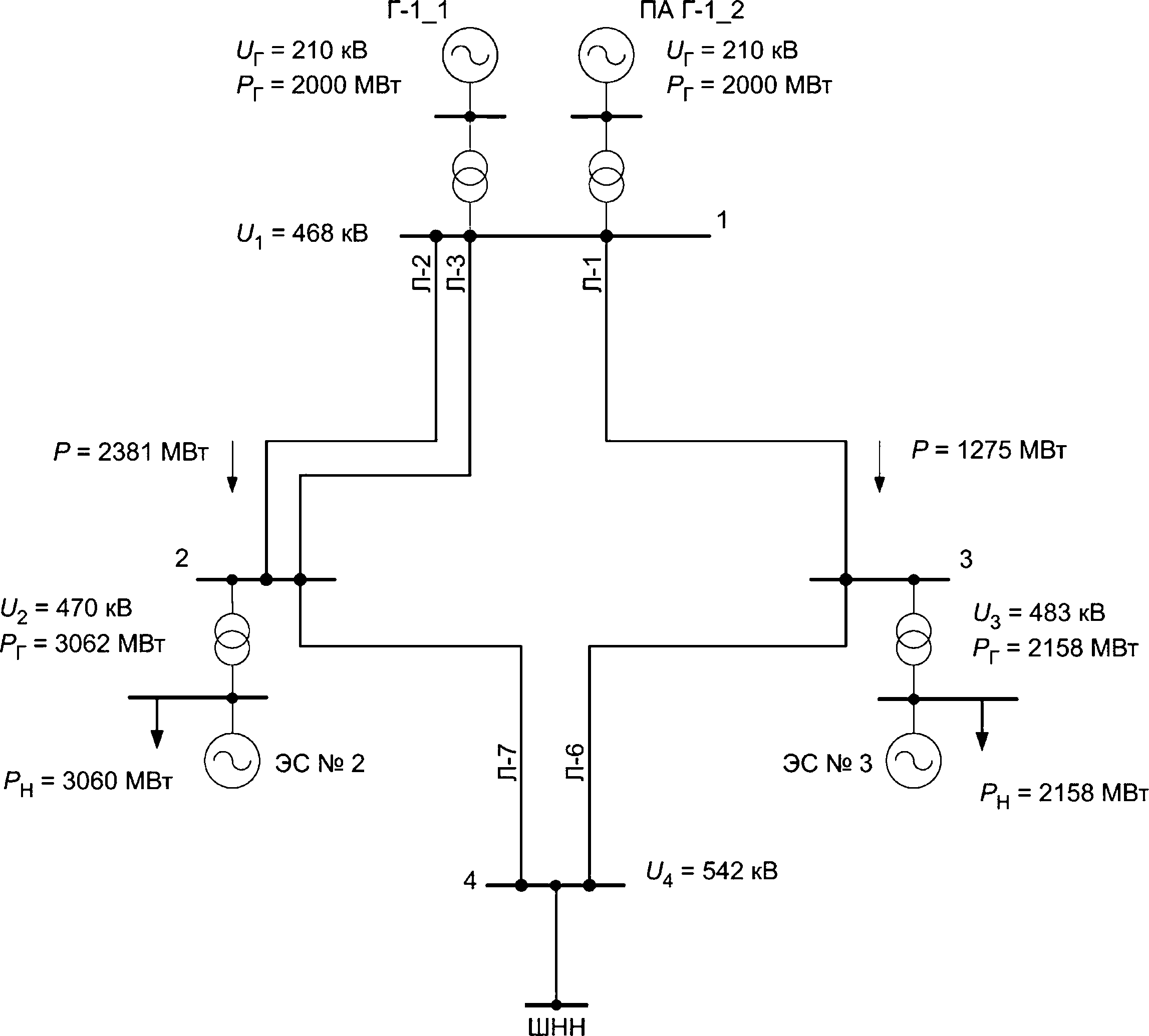
Рисунок Д. 14 — Схема 3. Режим 13
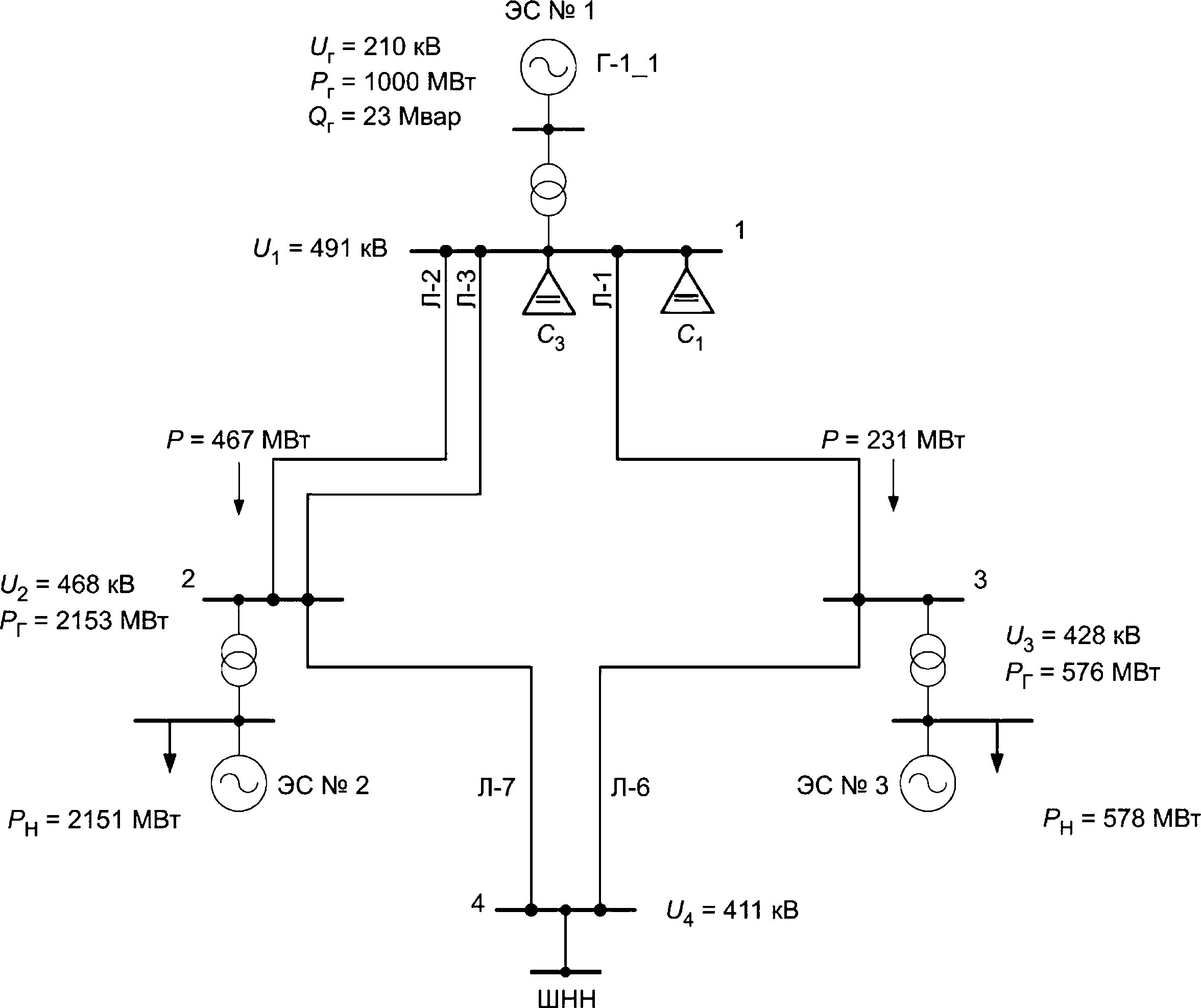
Рисунок Д. 15 — Схема 3. Режим 14
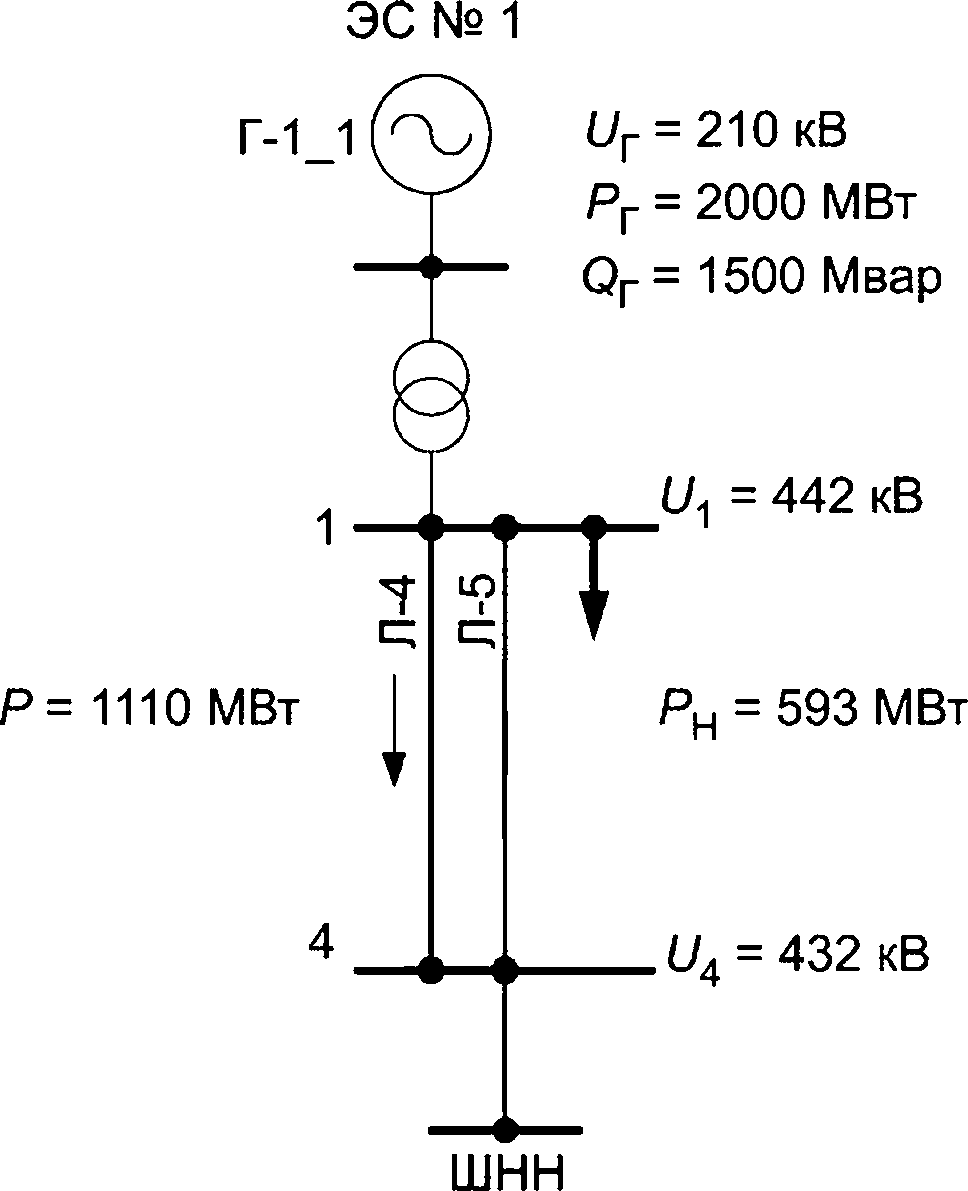
Рисунок Д. 16 — Схема 6. Режим 15
ЭС № 1
Г-1 1
Г-1 3
Р = 3675 МВт
Ur = 210 кВ
Рг = 2000 МВт
Ur = 210 кВ
Рг = 2000 МВт
U4 = 452 кВ
Ц = 463 кВ
ШНН
Рисунок Д. 17 — Схема 7. Режим 16
ЭС № 1
Ur = 210 кВ
Рг = 2000 МВт
Рг= 1000 МВт
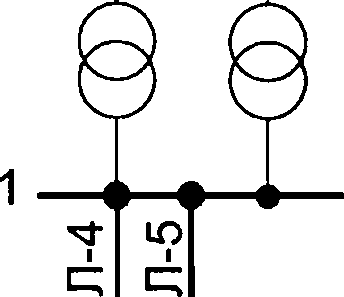
Ц = 469 кВ
Р = 2686 МВт
U4 = 454 кВ
ШНН
Рисунок Д. 18 — Схема 7. Режим 17
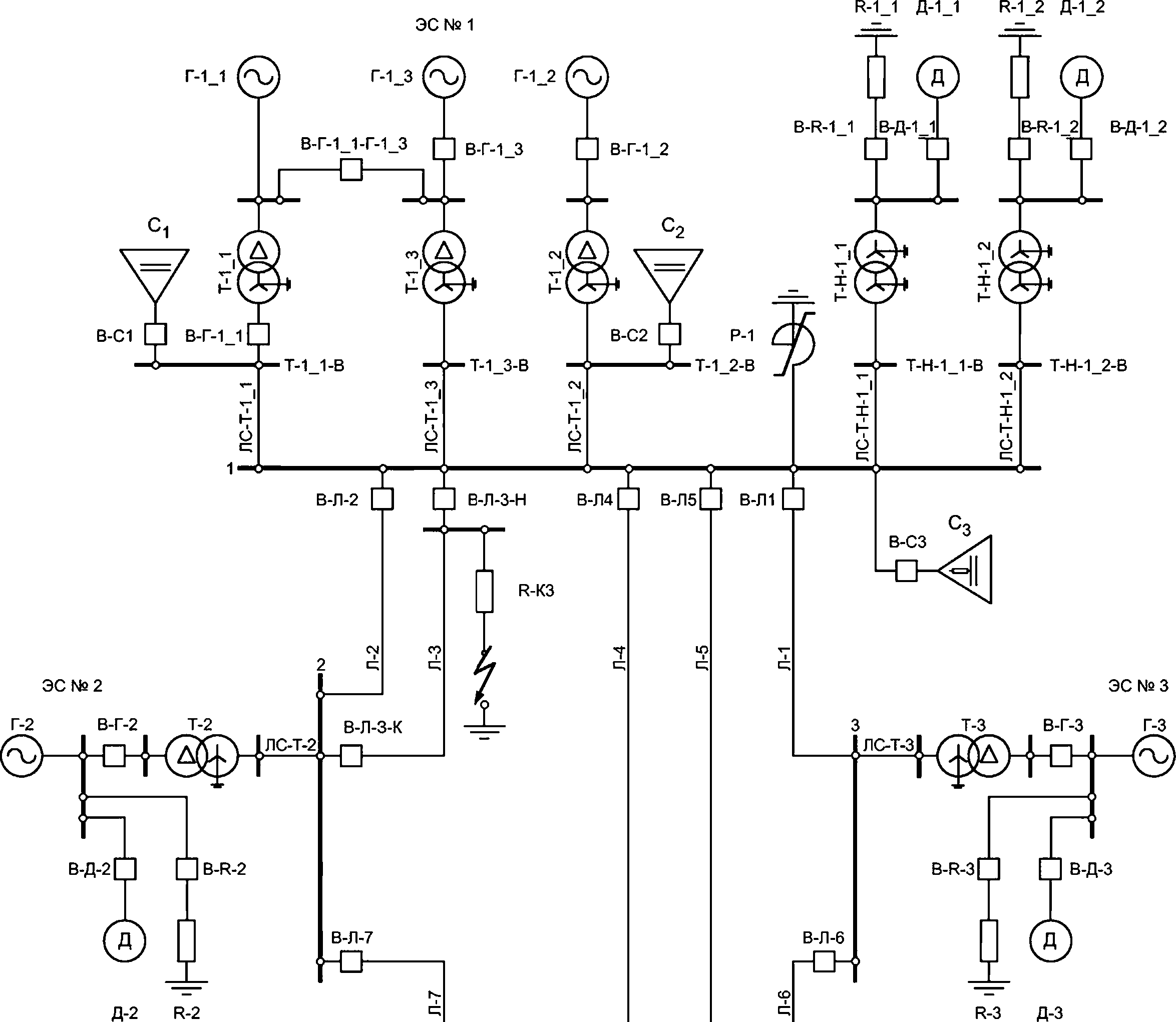
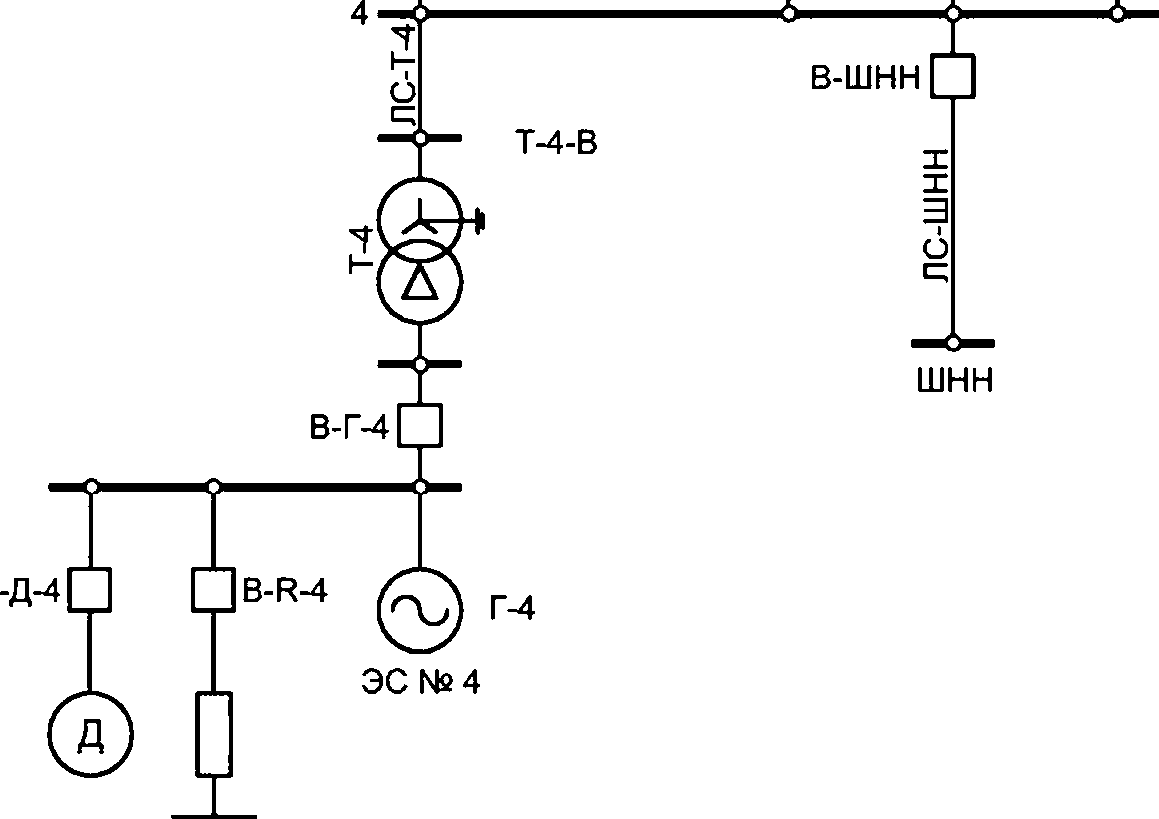
Д-4 R-4
ЭС — электрическая станция; Г — генератор; Т — трансформатор; Д — асинхронный двигатель нагрузки; R — активный шунт нагрузки; Л — линия электропередачи; С — емкость; В — выключатель; Т-Н — трансформатор нагрузки; ЛС — соединительные элементы
Рисунок Д. 19 — Общая схема математической модели энергосистемы
Д.2.1.4 Математическая модель энергосистемы должна обеспечивать реализацию в выходных сигналах по напряжениям фаз А, В, С статоров генераторов Г-1_1 и Г-1_3, поступающих к измерительным органам испытуемого АРВ сильного действия, выраженной третьей гармоники в мгновенных значениях на уровне 1,5 %, колебания частот 16,67 и 25 Гц в действующих значениях на уровне 0,08 %, составляющие обратной и нулевой последовательности на уровне 0,5 % текущего действующего значения напряжений статоров генераторов Г-1_1 и Г-1_3.
Д.2.1.5 Математическая модель энергосистемы при испытаниях должна функционировать в режиме реального времени. Частота дискретизации расчета должна быть задана не менее 10 кГц.
Д.2.2 Требования к моделям элементов математической модели энергосистемы
Д.2.2.1 Общая схема математической модели энергосистемы приведена на рисунке Д.19.
Д.2.2.2 Параметры моделей генераторов и типы их СВ, АРВ, турбин и регуляторов скорости приведены в таблицах Д.2, Д.З.
Таблица Д.2 — Параметры моделей синхронных генераторов
Параметр | Единица измерения | Значение | |||||||
Обозначение | — | Г-1_1 | Г-1_2 | Г-1_3 | Г-2 | Г-3 | Г-4 | Е-1_1 | Е-1_3 |
Модель СВ1) | — | СТН/БСВ | — | СТН/БСВ | — | — | — | — | — |
Модель АРВ | — | — | АРВ-СД | — | АРВ-П | АРВ-П | АРВ-П | — | — |
Модель турбины и PC | — | 1 | 1 | 1 | 1 | 1 | 2 | 3 | 3 |
Q ном | МВА | 2500 | 2500 | 2500 | 9000 | 2500 | 125000 | 257,678 | 267,46 |
Ц-1ОМ | кВ | 210 | 210 | 210 | 230 | 230 | 230 | 74,32 | 72,46 |
COS(p | — | 0,8 | 0,8 | 0,8 | 0,8 | 0,8 | 0,8 | — | — |
Ха | о.е. | 0,065 | 0,056 | 0,062 | 0,06 | 0,053 | 0,593 | 0,056 | 0,060 |
Xd | о.е. | 1,885 | 1,629 | 1,846 | 1,049 | 1,334 | 10,373 | 0,453 | 0,460 |
Xd' | о.е. | 0,184 | 0,186 | 0,204 | 0,287 | 0,143 | 2,838 | 0,143 | 0,154 |
Xd" | о.е. | 0,098 | 0,084 | 0,093 | 0,09 | 0,079 | 0,89 | 0,084 | 0,090 |
Xq | о.е. | 1,650 | 1,010 | 1,777 | 0,900 | 1,181 | 6,685 | 0,400 | 0,443 |
Y " | о.е. | 0,112 | 0,097 | 0,106 | 0,110 | 0,09 | 1,088 | 0,106 | 0,103 |
о.е. | 0,02 | 0,04 | 0,029 | 0,012 | 0,027 | 0,366 | 0,043 | 0,029 | |
Tdo' | о.е. | 8,125 | 5,924 | 8,55 | 7,198 | 5,574 | 1,817 | 0,943 | 0,955 |
T " dO | о.е. | 0,042 | 0,043 | 0,053 | 0,092 | 0,039 | 0,092 | 0,045 | 0,062 |
Tq0" | о.е. | 0,06 | 0,062 | 0,076 | 0,110 | 0,056 | 0,131 | 0,060 | 0,083 |
Xo | о.е. | 0,130 | 0,010 | 0,130 | 0,130 | 0,130 | 0,130 | 0,130 | 0,130 |
Tj | с | 6,700 | 5,600 | 6,000 | 6,900 | 8,400 | 0,960 | — | — |
D | о.е. | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | — | — |
Примечания
SH0M — номинальная полная мощность генератора; t/H0M — номинальное напряжение статора генератора; coscp — номинальный коэффициент мощности генератора; Ха — сопротивление рассеивания статора; Xd— ненасыщенное продольное синхронное индуктивное сопротивление обмотки статора; Xd'— ненасыщенное продольное переходное индуктивное сопротивление обмотки статора; Xd"— ненасыщенное продольное сверхпереходное индуктивное сопротивление обмотки статора; | |||||||||
Окончание таблицы Д. 2
Xq — ненасыщенное поперечное синхронное индуктивное сопротивление обмотки статора;
Xq"— ненасыщенное поперечное сверхпереходное индуктивное сопротивление обмотки статора;
Ra — активное сопротивление обмотки статора;
Td0'— постоянная времени затухания переходных составляющих токов ротора в продольной оси при разомкнутой обмотке статора (ненасыщенное значение);
Луо"— постоянная времени затухания сверхпереходных составляющих токов ротора в продольной оси при разомкнутой обмотке статора (ненасыщенное значение);
Tq0"— постоянная времени затухания сверхпереходных составляющих токов ротора в поперечной оси при разомкнутой обмотке статора (ненасыщенное значение);
Хо — индуктивное сопротивление нулевой последовательности генератора;
Tj— механическая инерционная постоянная агрегата (генератора и турбины);
D — собственный коэффициент демпфирования агрегата (генератора и турбины);
БСВ — бесщеточная система возбуждения;
АРВ-СД — АРВ сильного действия;
АРВ-П — АРВ пропорционального действия;
СТН — статическая тиристорная независимая система возбуждения.
2 Тип модели турбины и регуляторов скорости — см. Д.2.3.
Таблица Д.З — Характеристики насыщения моделей синхронных генераторов
Наименование генератора | Параметр | Значения в точках | |||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
Г-1_1 | If, е.в.х.х.1) Uv, е.н.с. | 0,000 0,000 | 0,376 0,439 | 0,518 0,588 | 0,609 0,678 | 1,000 1,000 | 1,088 1,069 | 1,192 1,133 | 1,373 1,227 | 1,762 1,340 | — |
Г-1_2 | Коэффициенты насыщения SE10 = 0,0875; SE12 = 0,1875 | ||||||||||
Г-1_3 | /7 е.в.х.х. Ur, е.н.с. | 0,000 0,000 | 0,303 0,351 | 0,606 0,660 | 1,000 1,000 | 1,212 1,154 | 1,394 1,270 | — | — | — | — |
Г-2 | Коэффициенты насыщения SE10 = 0,2420; SE12 = 0,5620 | ||||||||||
Г-3 | Коэффициенты насыщения SE10 = 0,1375; SE12 = 0,2875 | ||||||||||
Е-1_1 | If, е.в.х.х. Ur, е.н.с. | 0,000 0,000 | 0,100 0,112 | 0,400 0,437 | 1,000 1,032 | 1,500 1,474 | 2,000 1,870 | 3,000 2,540 | 4,000 3,064 | 5,700 3,686 | 13,35 5,191 |
Е-1_3 | If, е.в.х.х. Ur, е.н.с. | 0,000 0,000 | 0,33 0,343 | 1,000 1,000 | 1,099 1,088 | 2,198 2,012 | 3,297 2,770 | 4,396 3,355 | 5,495 3,765 | 6,593 3,995 | — |
Г-4 | Коэффициенты насыщения SE10 = 0,0620; SE12 = 0,2260 | ||||||||||
1) е.в.х.х. — единица возбуждения холостого хода. Примечание — В настоящей таблице применены следующие обозначения: SE10 — разница токов возбуждения, необходимых для поддержания напряжения генератора, равного 1,0 о.е., на холостом ходу при характеристике без насыщения и характеристике с насыщением; SE12 — разница токов возбуждения, необходимых для поддержания напряжения генератора, равного 1,2 о.е., на холостом ходу при характеристике без насыщения и характеристике с насыщением. | |||||||||||
Д.2.2.3 В качестве моделей генераторов Г-1_1, Г-1_3, Е-1_1 и Е-1_3 должны использоваться модели генераторов Phase-Domain Synchronous Machine (PDSM) for internal faults (_rtds_PDSM_FLT_v2.def).
Д.2.2.4 В качестве моделей генераторов Г-2, Г-3, Г-4 должны использоваться модели генераторов Phase-Domain Synchronous Machine (PDSM) for internal faults (_rtds_PDSM_FLT_v2.def) либо Synchronous Machine Model with transformer and loads (lf_rtds_sharc_sld_MACV3'\) без опциональных блочных трансформаторов. Выбор модели выполняет организация, проводящая испытания, при разработке, настройке и подготовке математической модели энергосистемы.
Д.2.2.5 В качестве модели генератора Г-1_2 должна использоваться Phase-Domain Synchronous Machine (PDSM) for internal faults (_rtds_PDSM_FL.T_v2.def) либо Synchronous Machine Model with transformer and loads (lf_ rtds_sharc_sld_MACV3'\) без опционального блочного трансформатора или с опциональным блочным трансформатором. Выбор модели выполняет организация, проводящая испытания, при разработке, настройке и подготовке математической модели энергосистемы.
Д.2.2.6 Параметры моделей трансформаторов приведены в таблице Д.4. Допускается использование любых моделей трехфазных блочных трансформаторов библиотеки моделей RTDS, воспроизводящих указанные в таблице Д.4 режимные характеристики.
Д.2.2.7 Параметры моделей шунтов (lf_rtds_sharc_sld_SHUNTRLC или аналогичные) приведены в таблице Д.5.
Таблица Д.4 — Параметры моделей трансформаторов
Обозначение | S , МВА ном’ | UB, кВ | Чг кВ | РХ.Х’ МВт | Рк.з’ МВт | "к- % | /х.х, % |
Т-1_1 | 2500 | 500 | 212,5 | 52,5 | 22,5 | 15,9 | 2,896 |
Т-1 _2 | 2500 | 500 | 211,5 | 70,5 | 26,8 | 15,163 | 3,376 |
Т-1_3 | 2500 | 500 | 213,3 | 30,97 | 18,33 | 16,063 | 1,56 |
Т-2 | 9000 | 500 | 220,0 | 108,5 | 6,8 | 18,405 | 1,6356 |
Т-3 | 2500 | 500 | 233,5 | 84,0 | 57,0 | 12,925 | 4,552 |
Т-4 | 125000 | 500 | 233,0 | 110,7 | 2941 | 166,9 | 0,114 |
Т-Н-1_1 | 1600 | 500 | 234 | 75,0 | 19,8 | 2,13 | 9,48 |
Т-Н-1_2 | 1600 | 500 | 230 | 75,0 | 17,8 | 1,87 | 9,84 |
Примечание — В настоящей таблице применены следующие обозначения: SH0M — номинальная полная мощность трансформатора; UB — номинальное напряжение высокой стороны трансформатора; UH — номинальное напряжение низкой стороны трансформатора; /х х — ток холостого хода трансформатора; Рх х — потери холостого хода трансформатора; ик — напряжение КЗ трансформатора; Ркз — потери КЗ трансформатора. | |||||||
Таблица Д.5 — Параметры моделей шунтов
Обозначение | ЧоМ’ кВ | Рш, МВт | Ош, Мвар |
/?-1_1 | 230 | 416 | — |
/?-1_2 | 230 | 222 | — |
R-2 | 230 | 2645 | 163 |
R-3 | 230 | 771 | 115 |
R-4 | 230 | 3027 | 225 |
Примечание — В настоящей таблице применены следующие обозначения: t/H0M — номинальное напряжение шунта; РП| — номинальная активная мощность, потребляемая шунтом; Ош — номинальная реактивная мощность, потребляемая шунтом. | |||
Д.2.2.8 Сопротивление каждой фазы шунта КЗ должно составлять 0,453 Ом (на напряжении 500 кВ).
Д.2.2.9 В качестве моделей асинхронных двигателей следует использовать модель lf_rtds_risc_sld_INDM, параметры которой приведены в таблице Д.6.
Таблица Д.6 — Параметры моделей асинхронных двигателей
Обозначение | Чном’ кВ | р НОМ’ МВт | ПНОМ’ об/мин | КПД, % | COS(Phom | 1Z г'/пуск’ о.е. | ^пуск’ о.е. | ^тах’ о.е. | Ъ’С | D, о.е. |
Д-1_1 | 220 | 1120 | 1420 | 83,5 | 0,84 | 6,0 | 1,9 | 2,2 | 1,08 | 0,0 |
Д-1_2 | 220 | 680 | 1420 | 81,5 | 0,82 | 5,5 | 1,7 | 2,0 | 0,36 | 0,0 |
Окончание таблицы Д. 6
Обозначение | Чюм’ кВ | р ' НОМ’ МВт | ПНОМ’ об/мин | кпд, % | cos<Phom | А/ г'/пуск’ о.е. | ^пуск’ о.е. | ^тах’ о.е. | Ъ-с | D, о.е. |
Д-2 | 220 | 2800 | 1440 | 86,0 | 0,84 | 6,5 | 1,5 | 2,0 | 0,48 | 0,0 |
д-з | 220 | 1800 | 1440 | 88,5 | 0,85 | 6,0 | 1,4 | 2,0 | 0,536 | 0,0 |
Д-4 | 220 | 5600 | 1450 | 88,5 | 0,88 | 5,0 | 1,3 | 2,0 | 0,84 | 0,0 |
Примечание — В настоящей таблице применены следующие обозначения: С/ном — номинальное напряжение асинхронного двигателя; Рном — номинальная активная мощность асинхронного двигателя; пном — номинальная скорость вращения асинхронного двигателя; КПД — коэффициент полезного действия асинхронного двигателя; cosq>HOM — номинальный коэффициент мощности асинхронного двигателя; К/пуск — кратность пускового тока асинхронного двигателя; A4nyCK — кратность пускового момента асинхронного двигателя; Л4тах — кратность максимального момента асинхронного двигателя; Tj— механическая инерционная постоянная агрегата (двигателя и нагрузки на его валу); D — собственный коэффициент демпфирования агрегата (двигателя и нагрузки на его валу). | ||||||||||
Д.2.2.10 Параметры моделей ЛЭП и соединительных элементов, требования и рекомендации по выбору их типа приведены в таблице Д.7.
Таблица Д.7 — Параметры моделей линий электропередачи и электрических связей
Номера узлов примыкания | Обозначение линии/связи | Хр Ом | Rv Ом |
1—3 | Л-1 | 101 | 3,6 |
1—2 | Л-2 | 49,3 | 2,6 |
Л-3 | 99,9 | 6,8 | |
1—4 | Л-4 | 24,7 | 1,2 |
Л-5 | 100,6 | 5,2 | |
3—4 | Л-6 | 50,9 | 2,5 |
2—4 | Л-7 | 51,3 | 4,5 |
Т-1_1-В — 1 | ЛС-Т-1_1 | — | 0,52 |
Т-1_2-В — 1 | ЛС-Т-1_2 | — | 0,57 |
Т-1_3-В — 1 | ЛС-Т-1_3 | — | 0,42 |
Т-Н-1_1-В — 1 | ЛС-Т-Н-1_1 | — | 0,59 |
Т-Н-1_2-В — 1 | ЛС-Т-Н-1_2 | — | 0,62 |
Т-2-В — 2 | ЛС-Т-2 | — | 0,46 |
Т-З-В — 3 | ЛС-Т-3 | — | 0,56 |
Т-4-В — 4 | ЛС-Т-4 | — | 0,42 |
ШНН—4 | ЛС-ШНН | 7,54 | 0,42 |
Примечания
Хд — индуктивное сопротивление прямой последовательности линии/связи; ЛС — соединительные элементы.
| |||
Д.2.2.11 В качестве моделей конденсаторных батарей следует использовать модель lf_rtds_sharc_sld_ BRKRL.C (или аналогичную), параметры которой приведены в таблице Д.8.
Таблица Д.8 — Параметры моделей конденсаторных батарей
Обозначение | Чюм- кВ | Ош, Мвар |
Ci | 500 | 188 |
с2 | 500 | 966 |
сз | 500 | 984 |
Примечания
t/H0M — номинальное напряжение конденсаторной батареи; Ош — номинальная реактивная мощность, выдаваемая конденсаторной батареей.
| ||
Д.2.2.12 В качестве модели ШНН следует использовать модель ШНН Source Model из библиотеки RTDS (Jf_rtds_sharc_sld_ SRC).
Д.2.2.13 Параметры модели насыщающегося реактора и требования по выбору ее типа приведены в таблице Д.9.
Таблица Д.9 — Параметры реактора Р-1
Параметр | Единица измерения | Значение |
Модель | — | rtds_udc_SAT4 |
Тип соединения | — | Звезда с заземленной нейтралью |
L | Гн | 100 |
Ом | 0,0 | |
Цном_Л-Н | кВ | 288,675 |
L~air | Гн | 0,3 |
KneeNL | о.е. | 1,074 |
Т/ | с | 5 |
LoopNL | % | 0,0 |
EdlNL | % | 0,0001 |
LfNL | Гн | 106 |
sharpNL | — | 0 |
ndnl | — | 0,1 |
Примечание — В настоящей таблице применены следующие обозначения: L — индуктивность реактора при токе реактора, не вызывающем насыщение; Rs — активное сопротивление реактора; t/H0M л-н — номинальное фазное напряжение реактора; Lajr— индуктивность реактора при токе реактора, вызывающем насыщение; KneeNL — напряжение насыщения реактора; Г,— постоянная времени, характеризующая изменение напряжения в переходных процессах, вызывающих насыщение реактора; LoopNL — ширина петли гистерезиса; EdlNL — величина потерь, вызванных вихревыми токами; LfNL — постоянная часть индуктивности реактора; sharpNL — расчетный параметр, характеризующий расчетную характеристику намагничивания; NDnl — расчетный параметр. | ||
Д.2.2.14 При выполнении испытаний АРВ сильного действия, работающих в составе статических СВ, к выводам обмоток возбуждения моделей генераторов Г-1_1 и Г-1_3 должны быть подключены математические модели статических СВ. При выполнении испытаний АРВ сильного действия, работающих в составе БСВ, к выводам обмоток возбуждения моделей генераторов Г-1_1 и Г-1_3 должны быть подключены математические модели БСВ.
Д.2.2.15 В качестве математических моделей статических СВ синхронных генераторов Г-1_1 и Г-1_3 следует использовать стандартные математические модели тиристорных трехфазных мостов (тиристорных преобразователей) библиотеки RTDS, моделирование которых выполняется с использованием уравнений электрических цепей (Power System Components): rtds_vsc_HVDC6P или lf_rtds_sld_VGRPQ.
В качестве математической модели источника напряжения для математических моделей тиристорных преобразователей следует использовать модель независимого источника трехфазного переменного напряжения (lf_rtds_sharc_sld_SRC).
Д.2.2.16 Величина входного переменного напряжения математической модели независимого источника трехфазного напряжения тиристорных преобразователей статических СВ должна обеспечивать напряжение возбуждения генератора, равное 2,QUf ном при мгновенном изменении угла управления тиристорами до 0°—5° в номинальном режиме работы генератора, где Uf ном — номинальное напряжение возбуждения генератора.
Д.2.2.17 Каждая из математических моделей БСВ синхронных генераторов Г-1_1, Г-1_3 должна включать следующие элементы:
- трехфазный источник напряжения (lf_rtds_sharc_sld_SRC)',
- тиристорный преобразователь (lf_rtds_sharc_sld_VGRP6 или rtds_vsc_HVDC6P)',
- генератор-возбудитель* (_rtds_PDSM_FL.T_v2.def).,
- диодный мост (lf_rtds_sharc_sld_VGRP6 или rtds_vsc_HVDC6P).
В качестве источника питания тиристорного преобразователя следует использовать трехфазный источник напряжения. Выход тиристорного преобразователя должен быть подключен к обмотке возбуждения генератора-возбудителя. В качестве источника питания модели диодного моста необходимо использовать напряжение статора генератора-возбудителя. Выход диодного моста должен быть подключен к обмотке возбуждения синхронного генератора. Принципиальная схема моделей БСВ приведена на рисунке Д.206).
Д.2.2.18 Величина входного переменного напряжения моделей тиристорных преобразователей БСВ должна обеспечивать напряжение возбуждения генератора-возбудителя, равное 7,4Uff ном при мгновенном изменении угла управления тиристорами до 0°—5° в номинальном режиме работы генераторов (Г-1_1 либо Г-1_3 соответственно), где Uff ном — напряжение возбуждения генератора-возбудителя, соответствующее номинальному режиму работы основного генератора (Г-1_1 и Г-1_3 соответственно).
Генераторы-возбудители — генераторы Е-1_1 и Е-1_3 для генераторов Г-1_1 и Г-1_3 соответственно.
8,7
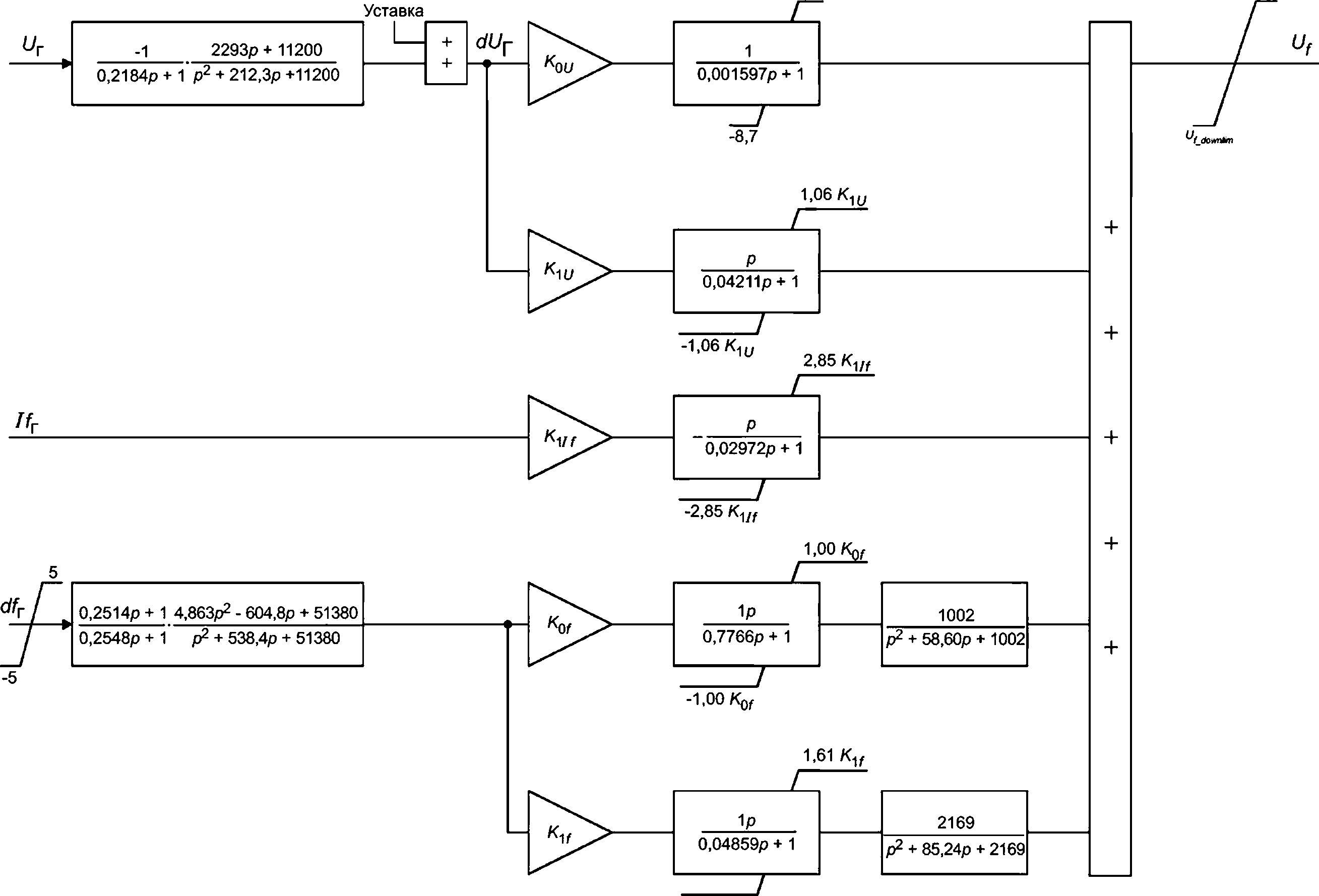
а)
-1,61 Ki
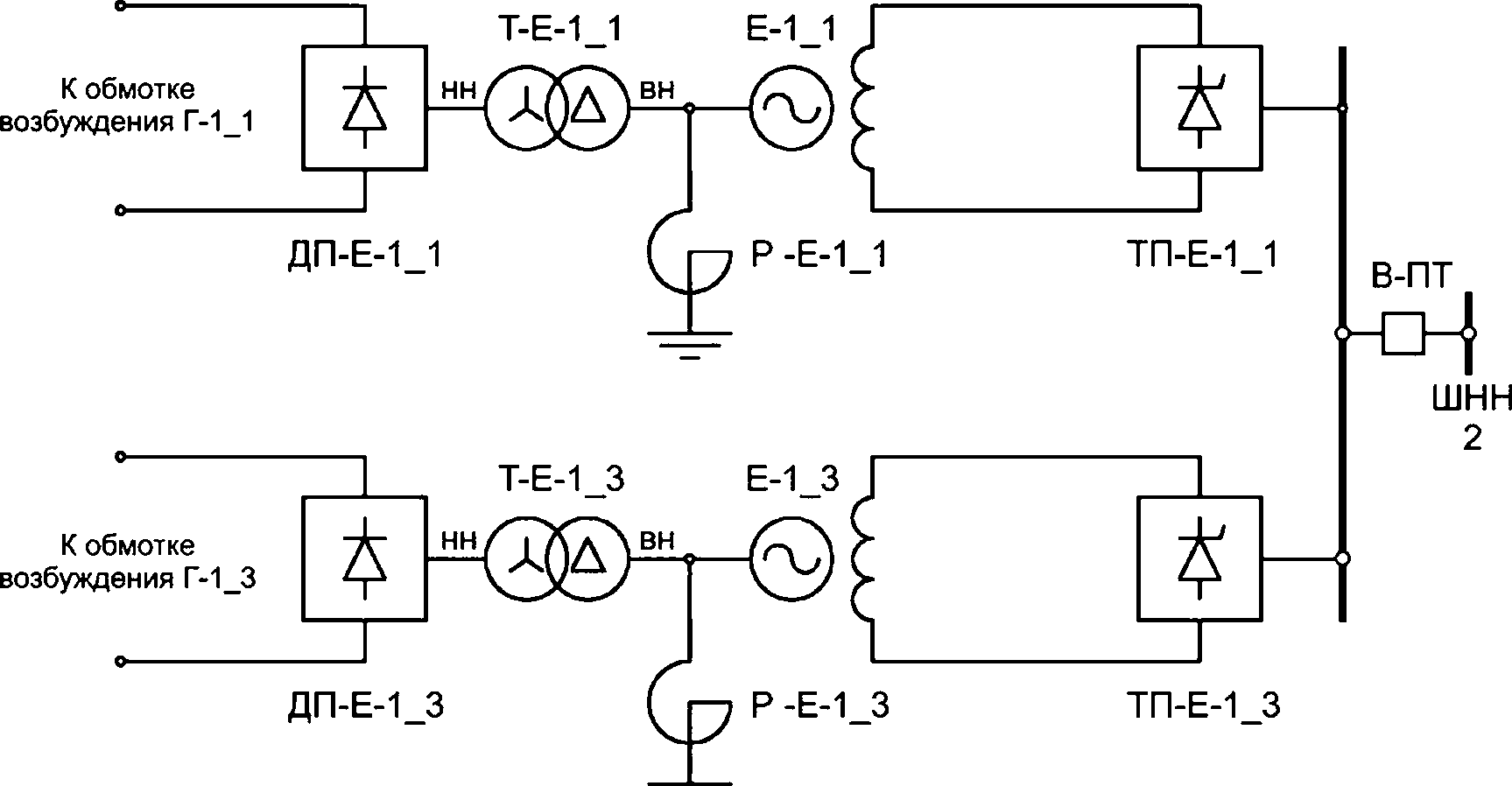
б)
Ur — напряжение статора генератора, полученное с помощью безынерционных измерителей, е.н.с.; Ifr — ток возбуждения генератора, е.в.н.; dfr — отклонение частоты напряжения статора генератора, Гц; Uf— напряжение возбуждения генератора, е.в.н.; р — оператор Лапласа; ТП-Е-1_1 и ТП-Е-1_3 — тиристорные преобразователи; ДП-Е-1_1 и ДП-Е-1_3 — диодные преобразователи; Р-Е-1_1 и Р-Е-1_3 — реакторы; Т-Е-1_1 и Т-Е-1_3 — согласующие трансформаторы
Рисунок Д.20 — Математическая модель АРВ-СД и принципиальная схема моделей БСВ для проведения испытаний7
Примечания
1 Параметры Р-Е-1_1:
- индуктивность реактора 0,06358 Гн;
- активное сопротивление 1 Ом.
2 Параметры Р-Е-1_3:
- индуктивность реактора 0,06224 Гн;
- активное сопротивление 0,8175 Ом.
3 Параметры Т-Е-1_1 и Т-Е-1_3:
- напряжение высшей стороны 220 кВ;
- напряжение низшей стороны 28,23 кВ;
- номинальная полная мощность 228 МВА;
- индуктивное сопротивление прямой последовательности трансформатора 0,01 о.е.;
- потери холостого хода трансформатора 0,001 о.е.;
- реактивные токи холостого хода 0,1 %.
Д.2.3 Модели турбин, АРВ, автоматических регуляторов скорости турбин, момента сопротивления на валу асинхронного двигателя
Д.2.3.1 Модели АРВ и СВ синхронных генераторов должны состоять из пропорционально-дифференциального регулятора напряжения, каналов стабилизации в соответствии со схемой, приведенной на рисунке Д.20а) и в таблице Д.10, а также обеспечивать релейную форсировку возбуждения со следующими параметрами:
- уставка ввода — 85 % исходного значения;
- уставка снятия — 90 % исходного значения;
- задержка на снятие — отсутствует.
Таблица Д.10 — Параметры моделей АРВ (коэффициенты усиления и потолочные значения)
Наименование АРВ | кои< е.в.н./е.н.с. | KW’ е.в.н./е.н.с./с | ^0f’ е.в.н./Гц | Kw е.в.н./Гц/с | K.lf, е.в.н./ е.т.р.1 >/с | Ufdownlim’ е.в.н. | Uf_uplim’ е.в.н. |
АРВ-СД Г-1_2 | 50 | 4,7 | 2,0 | 3,1 | 0,7 | -1,7 | 1,72 |
АРВ-П Г-2 | 1,0 | — | — | — | — | -0,15 | 2,10 |
АРВ-П Г-3 | 25,0 | — | — | — | — | 0,06 | 2,50 |
АРВ-П Г-4 | 5,0 | — | — | — | — | 0,0 | 0,2 |
1> е.т.р. — единица тока ротора. Примечание — В настоящей таблице применены следующие обозначения: Кои— коэффициент усиления пропорционального канала регулятора напряжения (по отклонению напряжения); Kw— коэффициент усиления дифференциального канала регулятора напряжения (по производной напряжения); Kof— коэффициент усиления канала стабилизации по частоте напряжения; Ки— коэффициент усиления канала стабилизации по производной частоты напряжения; K-\lf— коэффициент усиления канала стабилизации по производной тока ротора; Uf ирцт — верхнее потолочное значение напряжения возбуждения; U^downiim — нижнее потолочное значение напряжения возбуждения; АРВ-СД — АРВ сильного действия; АРВ-П — АРВ пропорционального действия. | |||||||
Д.2.3.2 В качестве модели регулятора скорости Г-1_1, Г-1_2, Г-1_3, Г-2 и Г-3 следует использовать модель, работа которой описывается выражением (тип 1)
MA={-dW)Kdw+M^, (Д.1)
где dW — отклонение скорости вращения генератора от номинальной, о.е.;
KdW = 1.0 — коэффициент усиления для Г-1_1, Г-1_2, Г-1_3, Г-3;
KdW= 0,1 — коэффициент усиления для Г-2;
KdW= 0,07 — коэффициент усиления для Г-4 при ручном управлении мощностью;
Муст — уставка регулятора скорости, о.е.
В качестве модели регулятора скорости Г-4 следует использовать модель, работа которой описывается выражением (тип 2)
My=(-dW)KdW, (Д.2)
где dW — отклонение скорости вращения генератора от номинальной, о.е.;
KdW= 2,0 — коэффициент усиления.
В качестве модели регулятора скорости генераторов-возбудителей Е-1_1 и Е-1_3 следует использовать модель, обеспечивающую равенство их скорости скоростям генераторов Г-1_1 и Г-1_3 соответственно (тип 3).
Д .2.3.3 Момент сопротивления Мс на валу асинхронных двигателей должен описываться следующим выражением
Мс = const, (Д.З)
где const— константа, определяемая требуемым электроэнергетическим режимом работы двигателя.
Д .2.4 Система контроля и регистрации параметров электроэнергетического режима
Д .2.4.1 Математическая модель энергосистемы должна быть оснащена системой контроля и регистрации параметров электроэнергетического режима.
Д .2.4.2 Система контроля параметров электроэнергетического режима должна обеспечивать измерение и визуализацию напряжений во всех узлах и перетоков активной и реактивной мощности во всех ветвях схемы.
Д .2.4.3 Система регистрации параметров электроэнергетического режима должна обеспечивать одновременную синхронизированную по времени регистрацию следующих параметров электроэнергетического режима:
- перетоки активной мощности по ЛЭП Л-1 Л-2 и Л-3 [Р^], Л-4 и Л-5 [Р-^];
- активная и реактивная мощности генераторов Г-1_1 [Рм v Qp^ 1], Г-1_2 [Рр^ 2, Qp-1 2] и Г-1_3 [Рр-1 з> $г-1_з1;
- напряжения статора генераторов Г-1_1 [С7Г_1 -|], Г-1_2 [l/р^ 2], Г-1_3 [С/г_1 3];
- напряжения возбуждения генераторов Г-1_1 [Ufr_^ 1], Г-1_2 [Ufp^ 2], Г-1_3 [0/Ам 3];
- токи ротора генераторов Г-1_1 [lf^ 1], Г-1_2 [/^г_1 2], Г-1_3 [lfr_^ 3J;
- напряжения фаз A [t/1a], В [D1b] и С [D1c] на шинах 500 кВ узла 1;
- частота электрического тока в узле 1 [df];
- относительный угол между напряжением статора генератора Г-1_1 (Г-1_3) и напряжением узла 4 [81_4];
- относительный угол между напряжением статора Г-3 и напряжением статора Г-1_1;
- относительный угол между напряжением статора Г-2 и напряжением статора генератора Г-1_1.
При испытании АРВ сильного действия, работающих в составе БСВ, дополнительно следует выполнять регистрацию следующих параметров:
- напряжения статора генераторов Е-1_1 1], Е-1_3 [UE_^ 3];
- напряжения возбуждения генераторов Е-1_1 [t/fE_1 1 или Uff^ 1], Е-1_3 3 или Uffv_^ 3];
- токи возбуждения генераторов Е-1_1 [lfE^ 1 или 1], Е-1_3 [lfE_^ 3 или 3];
- ток ротора генератора Г-1_1, рассчитанный с использованием диаграммы Потье (сигнал подается от испытуемого АРВ сильного действия) [#потье1-
Д .2.4.4 Система регистрации параметров электроэнергетического режима должна обеспечивать:
- измерение фиксируемых параметров электроэнергетического режима с дискретностью не более 1 мс;
- запись фиксируемых параметров электроэнергетического режима с дискретностью не более 20 мс;
- запись фиксируемых параметров электроэнергетического режима в течение не менее 180 с.
Д .2.5 Подключение испытуемого АРВ сильного действия к математической модели синхронного генератора
Д .2.5.1 Подключение испытуемого АРВ сильного действия к математической модели синхронного генератора следует выполнять в соответствии с документацией изготовителя АРВ сильного действия. Подключение должно обеспечивать корректное функционирование АРВ сильного действия при выполнении всех экспериментов программы испытаний.
Д .2.5.2 Для обеспечения возможности подключения промышленных образцов АРВ сильного действия к математической модели энергосистемы RTDS должна иметь:
- не менее 12 сигналов по напряжению (порядка 100 В линейного напряжения в номинальном режиме работы модели генератора);
- не менее 12 сигналов по току (порядка 5 А в фазе в номинальном режиме работы генератора);
- соответствующие математической модели энергосистемы значения токов при выполнении экспериментов;
- возможность выдачи с помощью плат аналогового вывода не менее 24 аналоговых сигналов по напряжению (±10 В или более);
- возможность выдачи с помощью устройств дискретного вывода не менее 10 дискретных сигналов (по напряжению и/или сухих контактов).
Д.2.5.3 Управление моделями тиристорных преобразователей статических и бесщеточных СВ генераторов Г-1_1 и Г-1_3 требует наличия у RTDS возможности приема не менее 12 дискретных сигналов с помощью плат дискретного ввода.
Д.З Проведение испытаний
Д.3.1 Схемно-режимные условия проведения испытаний
Д.З. 1.1 Испытания следует проводить для схемно-режимных условий, приведенных на рисунках Д.1—Д.18.
Д.З.1.2 Испытания АРВ сильного действия выполняют посредством моделирования следующих возмущений: а) тестовые возмущения:
- ступенчатое изменение уставки по напряжению испытуемого АРВ сильного действия на плюс 5 % номинального значения (тестовое возмущение 1);
- однофазное КЗ (длительностью 0,04 с) на шинах электрической станции № 1 (тестовое возмущение 2);
- ступенчатое изменение напряжения на шинах электрической станции № 1 посредством подключения емкости С2 (С1 в экспериментах 17 и 18) к шинам электрической станции № 1 (тестовое возмущение 3);
б) нормативные возмущения в соответствии с требованиями [3] со следующими параметрами:
- длительность КЗ — 0,12 с;
- длительность бестоковой паузы ОАПВ — 1с;
- длительность бестоковой паузы ТАПВ — 2 с;
- время отключения фазы действием УРОВ — 0,35 с;
- запаздывание на ввод управляющего воздействия от ПА — 0,4 с с момента возникновения КЗ.
Д.3.2 Минимально необходимый объем испытаний АРВ сильного действия
Д .3.2.1 Испытания выполняют в соответствии с программой испытаний, разработанной организацией, проводящей испытания.
Программа испытаний должна содержать эксперименты, проведение которых обеспечивает проверку:
- эффективности настройки каналов стабилизации (системного стабилизатора);
- апериодического характера нарушения статической устойчивости;
- качества стабилизации режима и проверку отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 — испытуемый АРВ, а на Г-1_2 — регулятор типа АРВ-СД);
- качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ;
- корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока;
- корректности работы функции релейной форсировки возбуждения в режимах, близких к предельным;
- обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА;
- корректности работы ОМ В;
- корректности работы ограничителя двукратного тока ротора8;
- обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока;
- корректности работы ограничителя напряжения ротора бесщеточного возбудителя9;
- корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя9;
- корректности расчета тока ротора по диаграмме Потье10.
При проведении испытаний АРВ сильного действия, применяющихся в составе БСВ, минимальный объем экспериментов должен включать все эксперименты, приведенные в таблице Д.1 (за исключением экспериментов 75, 76 и 77, если в АРВ сильного действия не реализован ограничитель двукратного тока ротора).
При проведении испытаний АРВ сильного действия, применяющихся в составе тиристорных СВ, минимальный объем экспериментов должен включать эксперименты, приведенные в таблице Д.1, за исключением экспериментов 89—91.
Д.3.2.2 Настройка испытуемых АРВ сильного действия должна быть выполнена владельцем АРВ сильного действия в соответствии с параметрами, определенными для используемой математической модели энергосистемы.
Д.3.2.3 Все эксперименты, предусмотренные в программе испытаний, необходимо выполнять при неизменных параметрах настройки испытуемых АРВ сильного действия.
Д.3.2.4 Если в процессе испытаний выявлена необходимость корректировки выбранных параметров настройки (в любом из экспериментов, предусмотренных программой испытаний, не обеспечивается корректная работа АРВ сильного действия), владелец АРВ сильного действия или уполномоченное им лицо выполняет корректировку параметров настройки испытуемых АРВ сильного действия, после чего все эксперименты, предусмотренные программой испытаний, должны быть выполнены повторно с новыми параметрами настройки АРВ сильного действия.
Д.3.2.5 Если при проведении испытаний АРВ сильного действия невозможно осуществить выбор параметров настройки, при которых обеспечивается корректная работа АРВ сильного действия во всех экспериментах, предусмотренных программой испытаний, испытуемый АРВ сильного действия и алгоритм его функционирования признаются не соответствующими требованиям [2].
Д.3.2.6 Регистрацию параметров электроэнергетического режима следует выполнять для каждого эксперимента.
Д.4 Анализ с проверкой выполнения критериев оценки результатов испытаний
Результаты испытаний считают положительными, а АРВ сильного действия и алгоритм его функционирования считают успешно прошедшими испытания, если обеспечивается корректная работа АРВ сильного действия во всех экспериментах, предусмотренных программой испытаний, с выполнением как общих, так и индивидуальных критериев оценки результатов испытаний, приведенных в Д.4.1 и Д.4.2 соответственно.
Общие критерии оценки результатов испытаний должны выполняться для всех экспериментов, предусмотренных программой испытаний, индивидуальные критерии должны выполняться только для экспериментов, для которых они установлены.
Д.4.1 Общие критерии оценки результатов испытаний
Д.4.1.1 Введение каналов стабилизации (включение системного стабилизатора) не должно приводить к возникновению колебаний активной мощности генератора Г-1_1 (Г-1_3) частот от 2,5 до 15 Гц, уровень которых оказывается выше 0,5 % от Рном вызванных высокочастотными пульсациями на выходе возбудителя.
Д.4.1.2 При моделировании всех возмущений, связанных с КЗ, сопровождающихся снижением напряжения статора генератора, должна работать функция релейной форсировки в соответствии с критериями, установленными в Д.4.2.6.
Д.4.1.3 При моделировании возмущений (кроме экспериментов по проверке корректности действия ОМВ, двукратного тока ротора, напряжения ротора, двукратного тока возбуждения возбудителя) действующее значение напряжения СГ1 3) прямой последовательности статора генератора Г-1_1 (Г-1_3) в результате действия релейной форсировки возбуждения не должно превышать 1,1 о.е. от исходного (предаварийного) действующего значения напряжения Up^ 1((Jr_1 3).
Д.4.2 Индивидуальные критерии оценки результатов испытаний
Д.4.2.1 В экспериментах 1—18 выполняют проверку эффективности настройки каналов стабилизации (системного стабилизатора).
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Для выполения анализа эффективности работы каналов стабилизации (системного стабилизатора) АРВ сильного действия необходимо определить постоянную времени затухания переходного процесса Т. Т следует определять по осциллограмме эксперимента, содержащей активную мощность генератора Г-1_1 при введенных каналах стабилизации (включенном системном стабилизаторе). Для определения Тдолжны быть построены вспомогательная огибающая колебательного процесса (см. рисунок Д.21) и вспомогательная линия, соответствующая установившемуся значению активной мощности генератора Г-1_1 (на рисунке обозначены синим и розовым цветом соответственно).
Для расчета Т должны быть определены значения следующих параметров переходного процесса:
Ртах — максимальное значение активной мощности генератора Г-1_1 при первом свободном колебании (должно определяться по кривой переходного процесса Рр^
Руст — установившееся значение активной мощности генератора Г-1_1 (должно определяться по кривой переходного процесса Р^
fmax — момент времени (абсцисса), соответствующий Ртах;
ДР — амплитуда колебания активной мощности генератора Г-1_1 (должна определяться по формуле ДР = Р -Р У ' max уст/’
РЕ = ДР/е — величина затухания активной мощности в е = 2,718 раз;
Р1 = Руст + РЕ — величина активной мощности с учетом затухания в е раз;
— момент времени, соответствующий величине активной мощности с учетом затухания в е раз (должен определяться как абсцисса точки пересечения вспомогательной огибающей колебательного процесса Рр^ 1 и прямой, описываемой выражением P(f) = P-j).
Т должно рассчитываться как разница между значениями и fmax.
Критериями эффективности работы каналов стабилизации (системного стабилизатора) АРВ сильного действия являются:
- время затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) должно снижаться по сравнению со временем при выведенных каналах стабилизации (отключенном системном стабилизаторе);
- значение постоянной времени затухания переходного процесса Т должно быть менее 3 с.
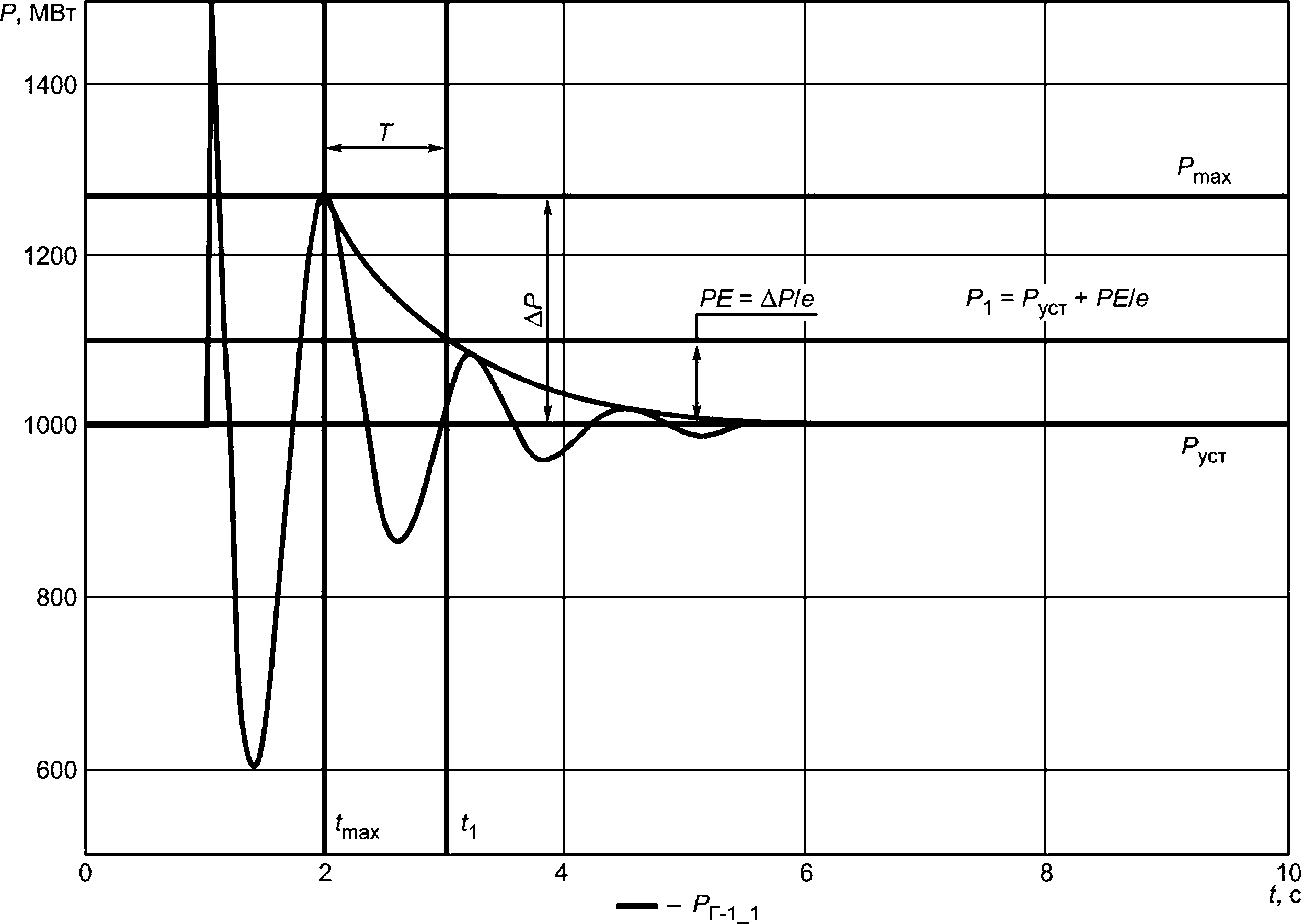
Рисунок Д.21 —Способ определения постоянной времени затухания колебательного процесса
График, характеризующий эффективную работу каналов стабилизации (системного стабилизатора), приведен на рисунке Д.22.
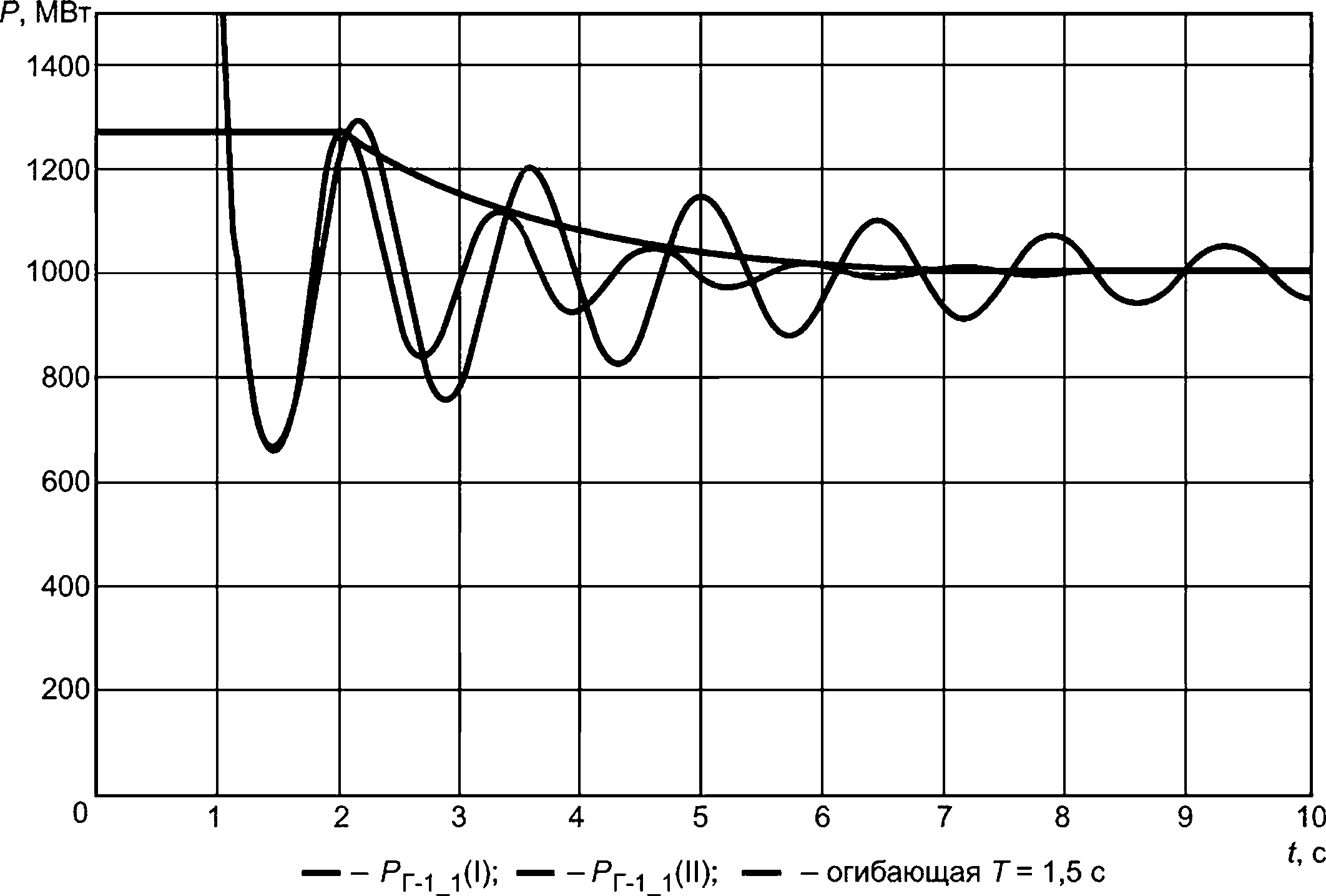
I — каналы стабилизации введены (системный стабилизатор включен);
II — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Д.22 — Эффективная работа каналов стабилизации (системного стабилизатора)
Д.4.2.2 В экспериментах 19—22 выполняют проверку апериодического характера нарушения статической устойчивости.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что она выполняется в режимах, близких к предельным по статической устойчивости. Особенности выполнения экспериментов 19—22:
- должно выполняться последовательное увеличение активной мощности генератором Г-1_1 на одинаковую величину;
- время между каждым изменением активной мощности генератором Г-1_1 должно быть достаточным для выявления возникновения и развития незатухающих автоколебаний;
- увеличение перетока активной мощности по линии Л-1 (в экспериментах 19 и 20) или по линии Л-3 (в экспериментах 21 и 22) при каждом изменении активной мощности генератором Г-1_1 должно составлять от 2,5 % до 3 % от предельных по апериодической статической устойчивости перетоков активной мощности по линии Л-1 или Л-3 соответственно.
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 19—22 является отсутствие возникновения незатухающих автоколебаний при увеличении перетоков активной мощности по линиям Л-1 и Л-3 до 97 % от предельных по апериодической статической устойчивости перетоков активной мощности при введенных каналах стабилизации (включенном системном стабилизаторе), для следующих параметров электроэнергетического режима:
- фазное напряжение шин 500 кВ электрической станции № 1;
- активная мощность генератора Г-1_1;
- перетоки активной мощности по линиям Л-1 и Л-3.
График, характеризующий корректность проведения эксперимента 19, приведен на рисунке Д.23.
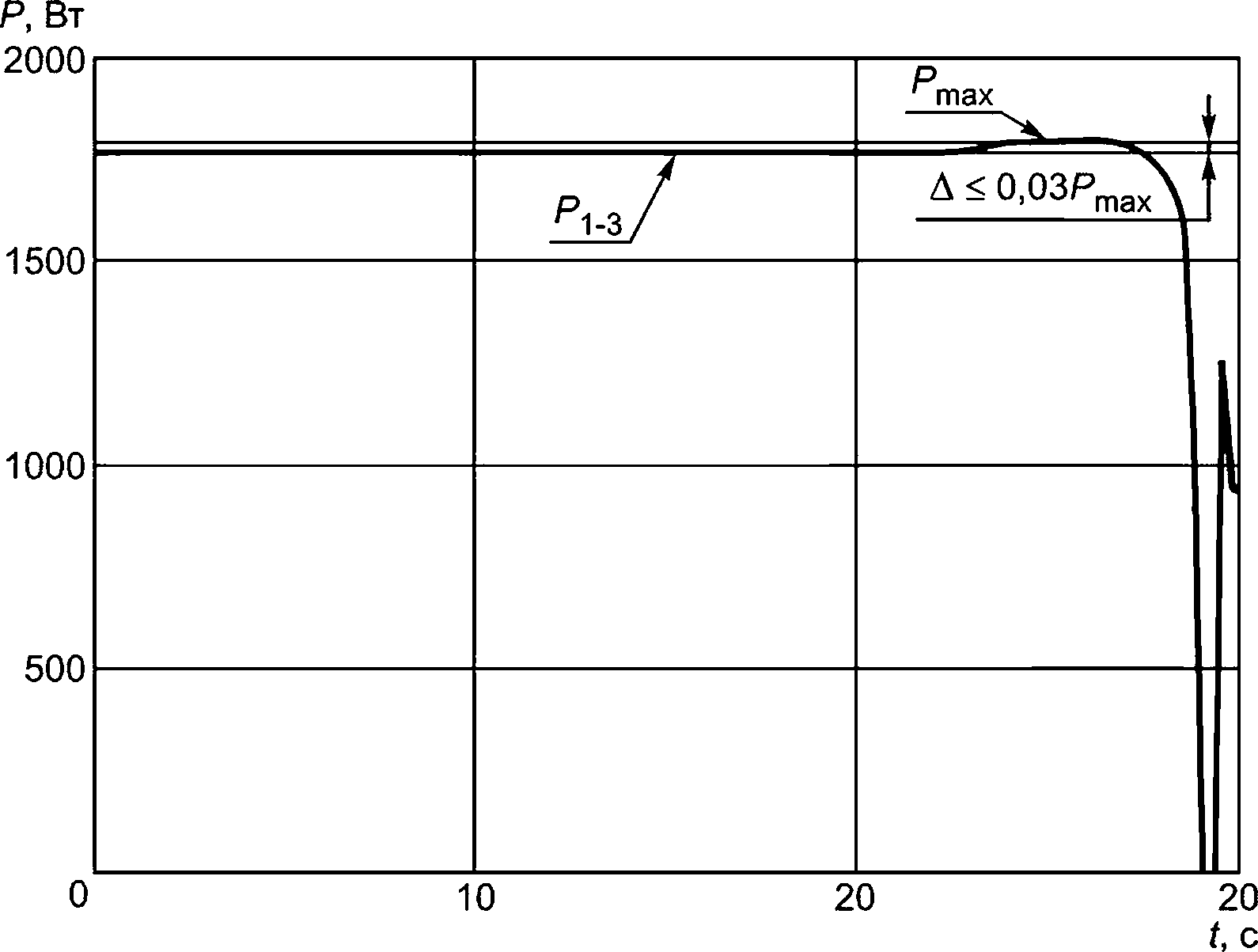
Рисунок Д.23 — Корректное проведение эксперимента по проверке апериодического характера нарушения статической устойчивости
Графики, характеризующие эффективную и неэффективную работу каналов стабилизации (системного стабилизатора) в электроэнергетических режимах, близких к предельному статической устойчивости, приведены на рисунках Д.24а) и Д.246) соответственно.
Д.4.2.3 В экспериментах 23—38 выполняется проверка качества стабилизации режима и проверка отсутствия внутригрупповой неустойчивости при совместной работе синхронных генераторов с АРВ различной структуры (на Г-1_1 устанавливают испытуемый АРВ; на Г-1_2 — регулятор типа АРВ-СД). Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1).
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 23—38 является обеспечение
- демпфирования электромеханических переходных процессов;
- отсутствия взаимного раскачивания синхронных генераторов.
U, Р,
кВ ГВт
ОПЛ Q Л
OUU О,U
осл 9 R
^□М
V
200 2,0
4 КЛ 4 К
Л
Юм 1,0
4 ПЛ 4 Л
1UU i,U
КП л к
I
Ом U,О
л л
и и
кл л к
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30 Г, с
-Ом -и,0
4 ПЛ 4 Л
- IUm - 1 ,м
4 КЛ 4 К
- 1 Ом - 1,0
ОПП О Л
<
-ZUU -Z,u
осп о к
-Z0U -Z,O
ОПП о п
-oUU -о,U
— -
Рг-1= — - Щ
Ь’ —
-^1-3
а) Эффективная работа каналов стабилизации
U, р,
кВ ГВт
360 п 340-320-300-280-260-240-220-200-180-160-140-120- 100- 80-60- 40-20- о--20- -40--60- -80--100--120--140--160--180-1 | 3,6 3,4 3,2 3,0 2,8 2,6 2,4 2,2 2,0 1,8 1,6 1,4 1,2 1,0 0,8 0,6 0,4 0,2 0 -0,2 -0,4 -0,6 -0,8 -1,0 -1,2 -1,4 -1,6 -1,8 | |||||||||||||||||
— | ||||||||||||||||||
— | — | — | — | — | — - | — | ||||||||||||
1 | ||||||||||||||||||
0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 | 26 | 28 | 301, с | |||
--рг-л--^1Ы--Р1-3
б) Неэффективная работа каналов стабилизации
Рисунок Д.24 — Эффективная и неэффективная работа каналов стабилизации (системного стабилизатора)
График, характеризующий корректную работу АРВ сильного действия с обеспечением демпфирования электромеханических переходных процессов и отсутствия взаимного раскачивания синхронных генераторов, приведен на рисунке Д.25.
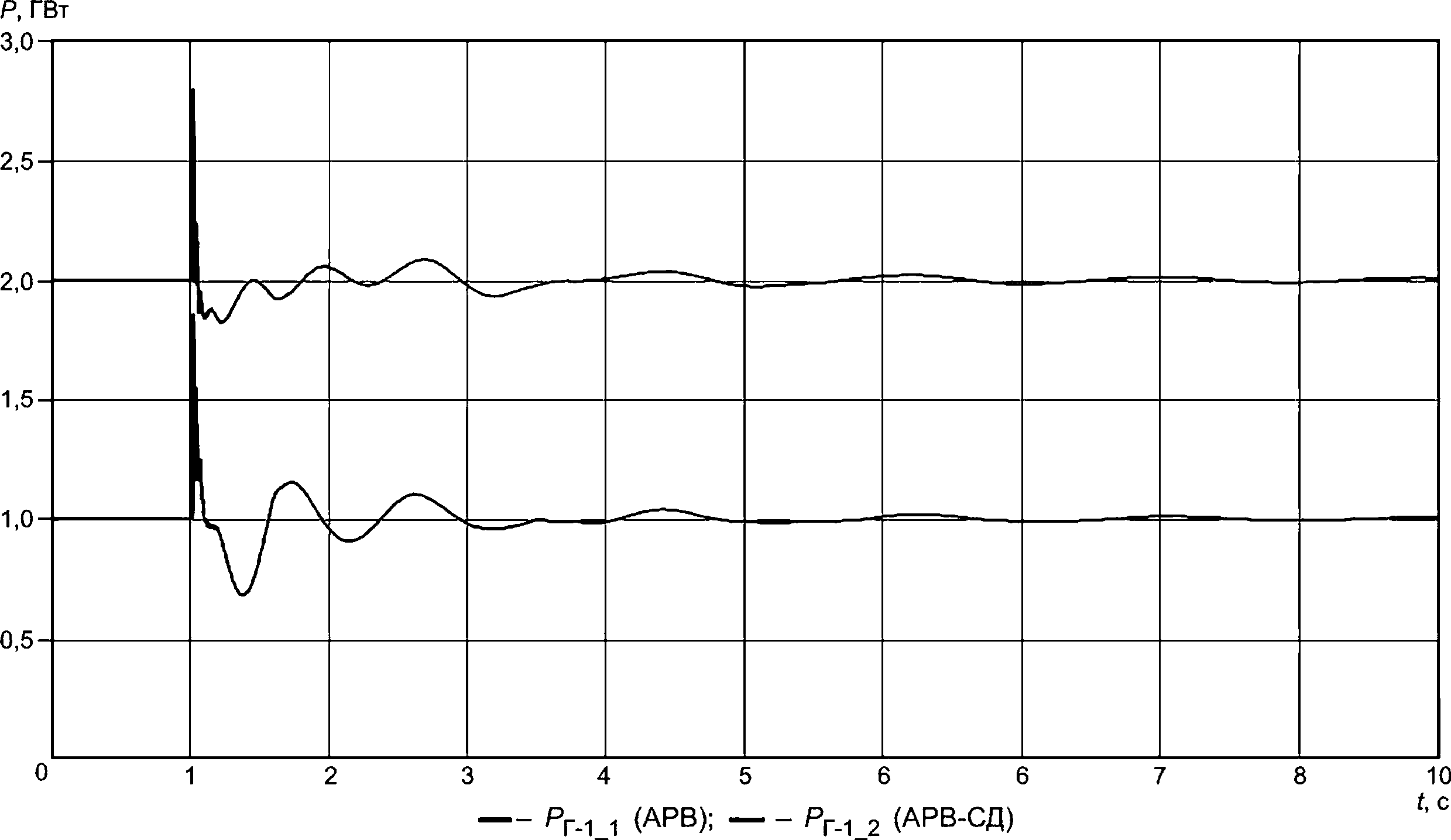
Рисунок Д.25 — Корректная работа АРВ сильного действия при совместной работе с регуляторами других типов на одной электростанции
Д.4.2.4 В экспериментах 39—52 выполняют проверку качества демпфирования аварийных колебаний при моделировании отключения линий и различных видов КЗ. Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1).
Критериями корректности работы АРВ сильного действия при выполнении экспериментов 39—52 являются: - уменьшение времени затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) по сравнению с временем затухания электромеханических переходных при выведенных каналах стабилизации (отключенном системном стабилизаторе) при моделировании нормативных возмущений групп I, II и III согласно требованиям [3] в соответствии с перечнем, указанным в таблице Д.1;
- колебания частот от 0,1 до 2,5 Гц должны демпфироваться при введенных каналах стабилизации (включенном системном стабилизаторе) за время, не превышающее 20 с;
- начиная с момента времени, отстающего на 15 с после моделирования последнего из нормативных возмущений11, размах колебаний активной мощности генератора Г-1_1 при введенных каналах стабилизации (включенном системном стабилизаторе) не должен превышать 6 % от величины мощности генератора, предшествующей возмущающему воздействию.
График, характеризующий эффективную работу каналов стабилизации (системного стабилизатора) при отключении линии Л-2, приведен на рисунке Д.26.
Д.4.2.5 В экспериментах 53—63 выполняют проверку корректности работы функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия при изменении частоты электрического тока.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что изменения частоты электрического тока моделируются посредством создания небалансов активной мощности, приводящих к увеличению/уменьшению частоты в энергосистеме со скоростью 0,05 Гц/с и более. Особенностью проведения экспериментов 53—61 является то, что каждое аварийное отключение моделируется трижды:
- при введенной функции блокировки каналов стабилизации (системного стабилизатора);
- при выведенной функции блокировки каналов стабилизации (системного стабилизатора);
- при выведенных каналах стабилизации (отключенном системном стабилизаторе).
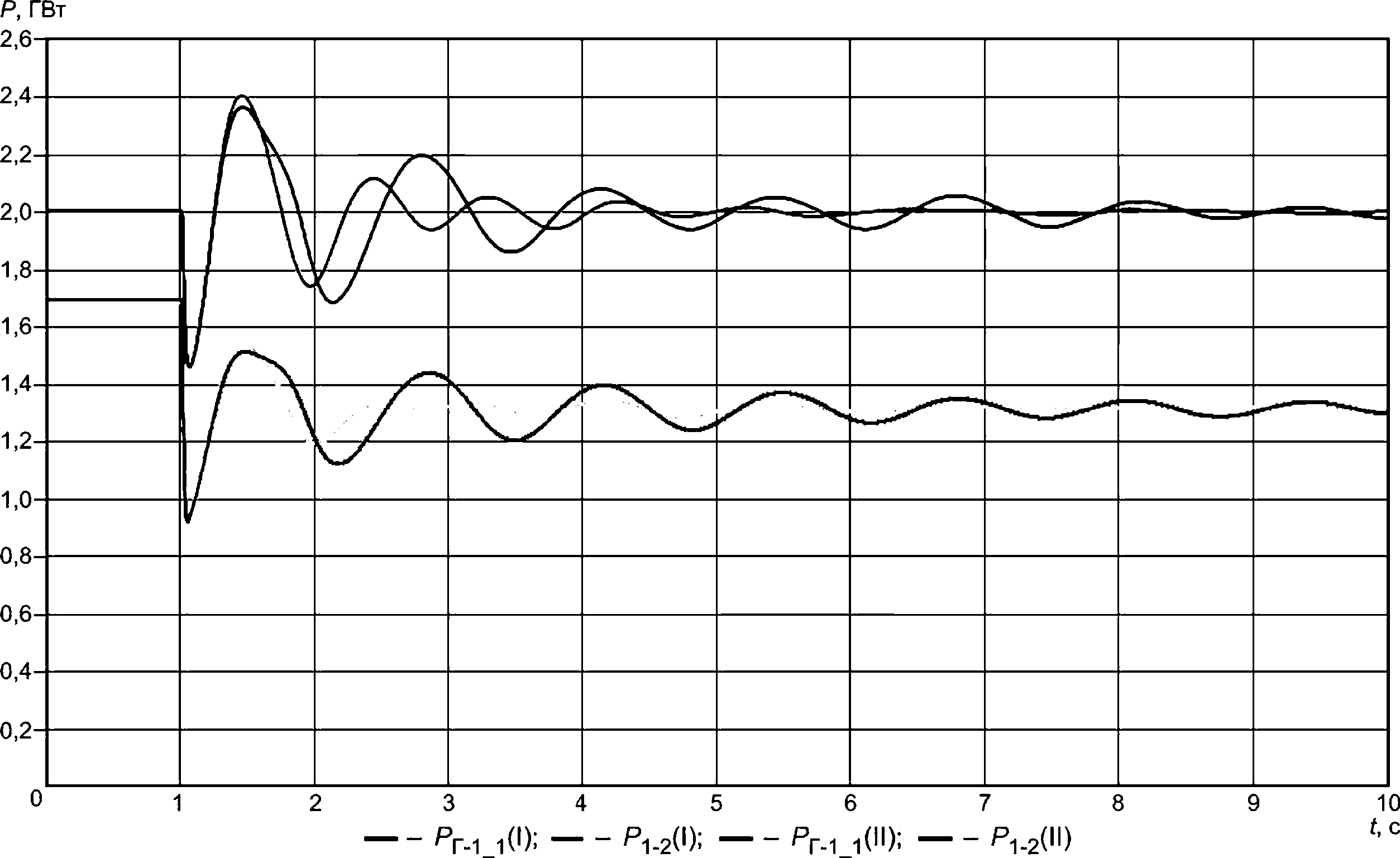
I — каналы стабилизации введены (системный стабилизатор включен);
II — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Д.26 — Эффективная работа каналов стабилизации (системного стабилизатора) при отключении линии Л-2
При этом корректность работы функции блокировки каналов стабилизации (системного стабилизатора) при возникновении небалансов мощности в энергосистеме должна оцениваться посредством сравнения характера изменения напряжения Г-1_1 при каждом из трех вышеуказанных состояний.
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 53—61 является: в режиме введенной в работу функции блокировки каналов стабилизации обеспечивается автоматический ввод функции блокировки каналов стабилизации (системного стабилизатора) за время не более 1,5 с после аварийного отключения нагрузки (генерации).
Графики, характеризующие корректную работу функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении генератора, приведены на рисунках Д.27, Д.28 и Д.29.
При выполнении экспериментов 62 и 63 выполняют проверку селективности действия функции блокировки каналов стабилизации (системного стабилизатора).
Критерием корректности работы АРВ сильного действия при выполнении экспериментов 62 и 63 является обеспечение идентичности электромеханических переходных процессов в указанных экспериментах.
График, характеризующий некорректную работу АРВ сильного действия (неселективность функции блокировки каналов стабилизации (системного стабилизатора)), приведен на рисунке Д.30.
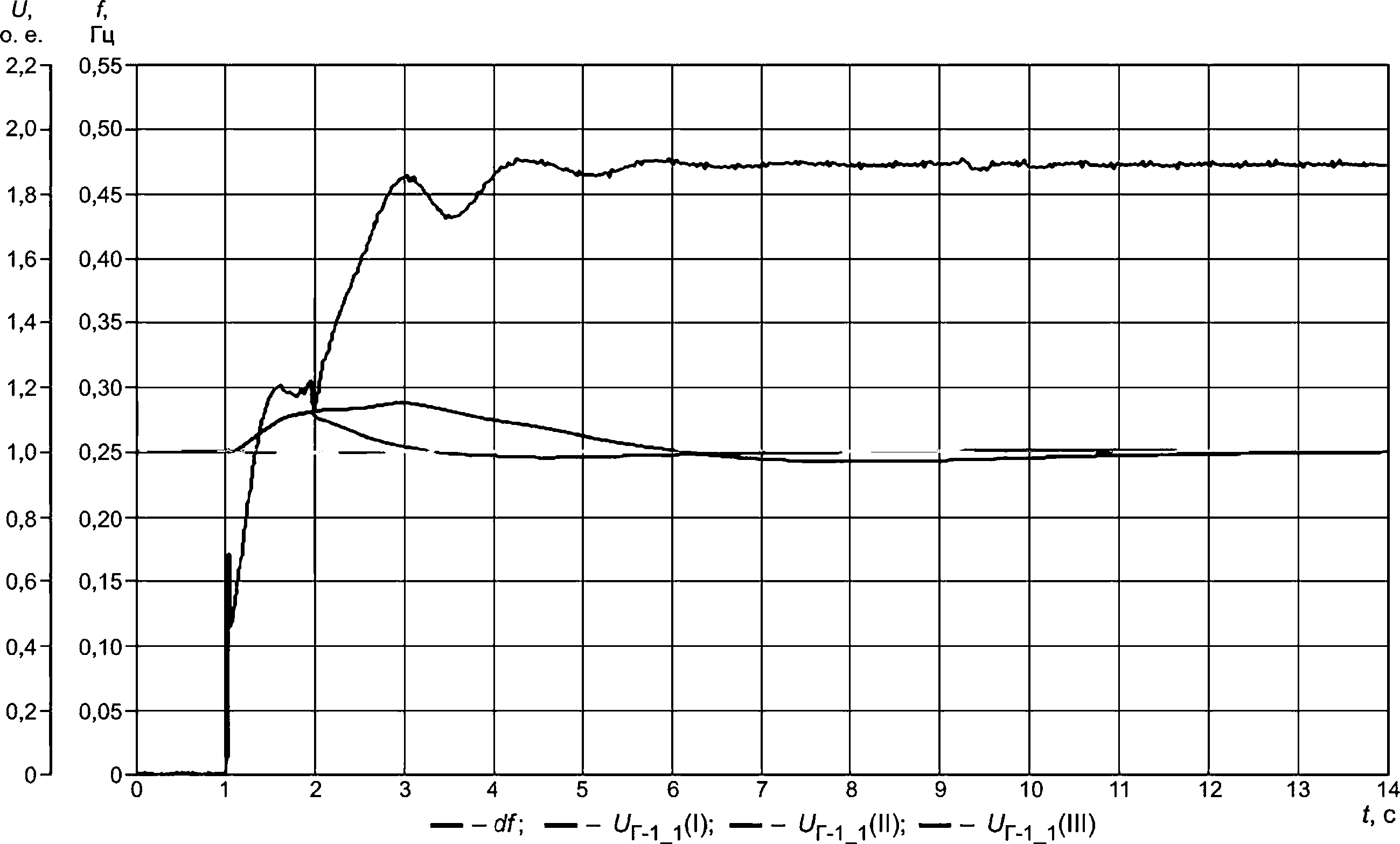
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Д.27 — Корректная работа функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении нагрузки на электрической станции № 2
U, f,
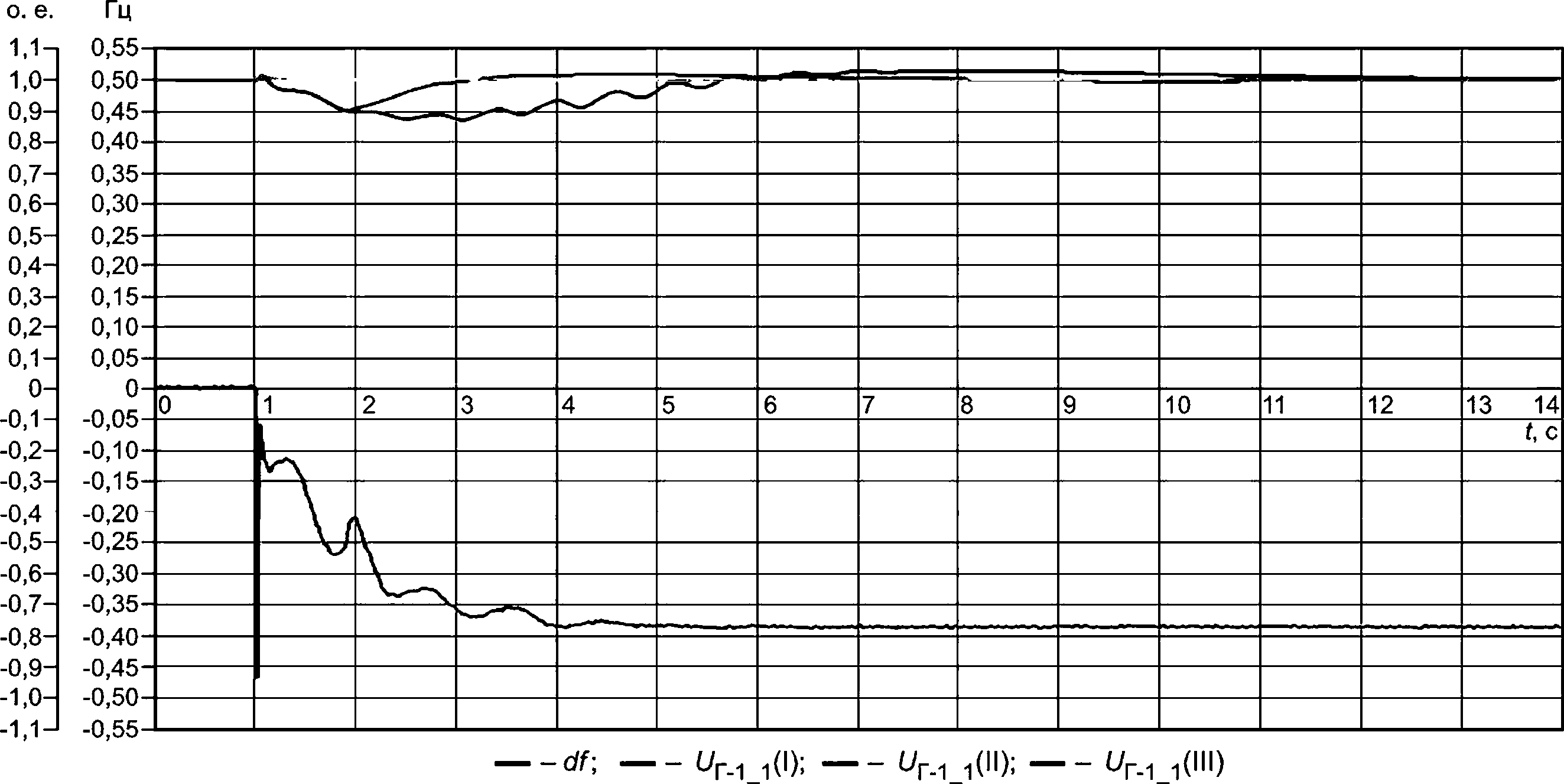
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Д.28 — Корректная работа функции блокировки каналов стабилизации или системного стабилизатора при аварийном отключении генератора на электрической станции № 3
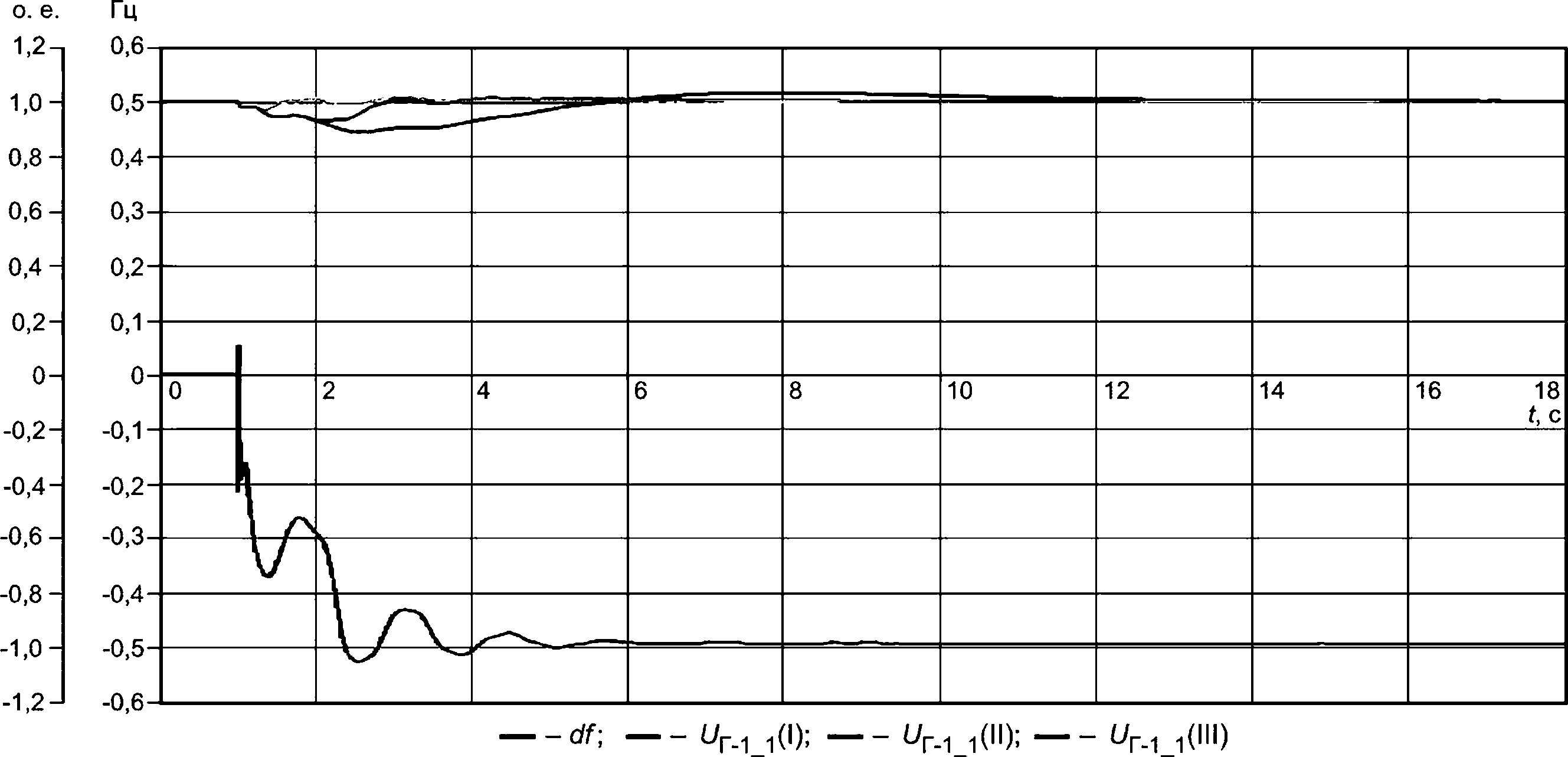
I — функция блокировки каналов стабилизации (системного стабилизатора) введена;
II — функция блокировки каналов стабилизации (системного стабилизатора) выведена;
III — каналы стабилизации выведены (системный стабилизатор отключен)
Рисунок Д.29 — Корректная работа функции блокировки каналов стабилизации (системного стабилизатора) при аварийном отключении генератора на электрической станции № 2
U, кВ 320-1
300-
280-
260-
240-
220-
200-
180 -
160-
140-
120-
100-
80-
60-
40-
20-
0-
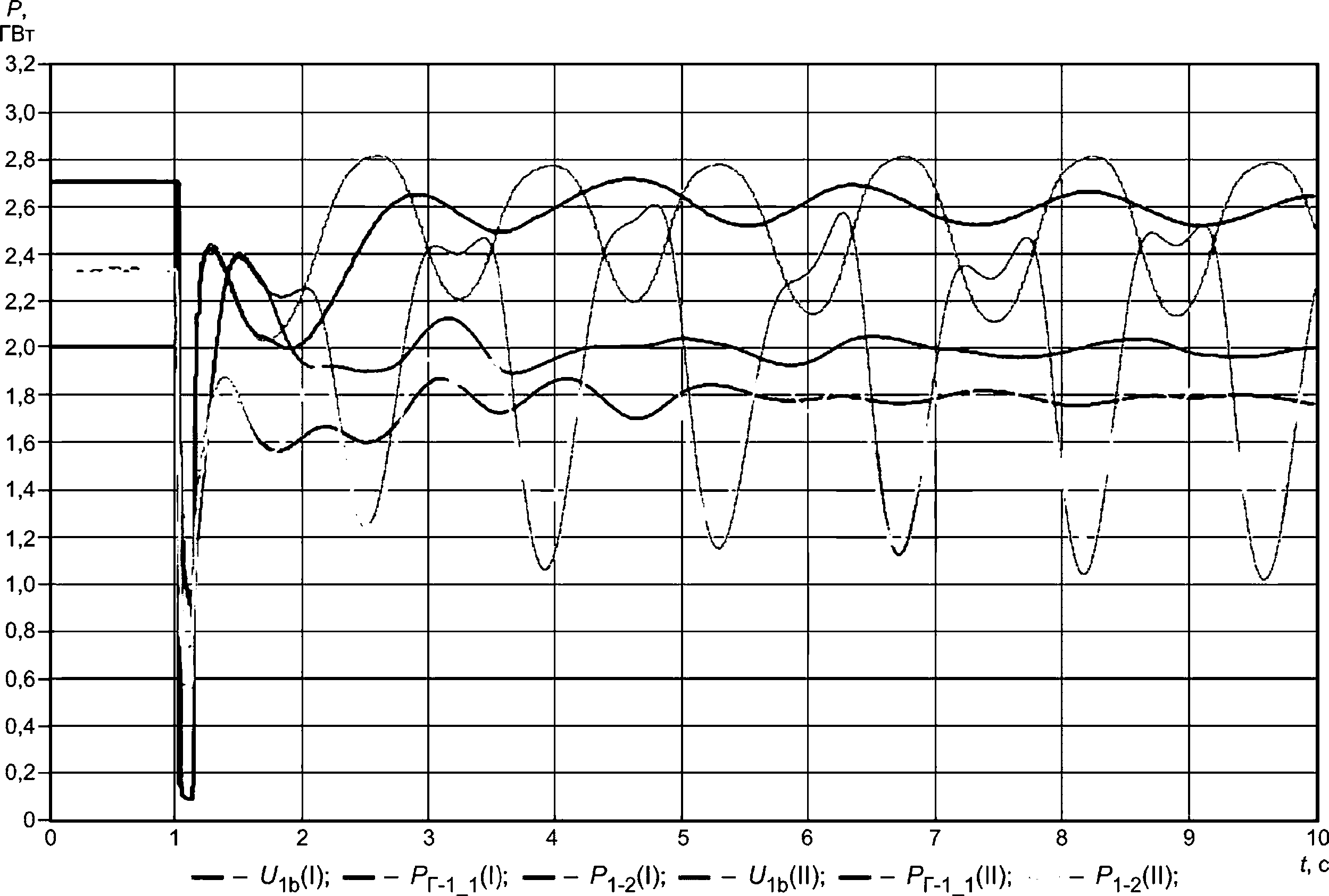
I — функция блокировки выведена;
II — функция блокировки введена (блокировка вводится при синхронных колебаниях)
Рисунок Д.30 — Некорректная работа функции блокировки каналов стабилизации (системного стабилизатора) АРВ сильного действия
Д.4.2.6 В экспериментах 64—67 выполняют проверку корректности работы функции релейной форсировки возбуждения в режимах, близких к предельным.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения экспериментов 64—67 является то, что при проверке должна рассматриваться работа АРВ сильного действия в предельном по устойчивости режиме и нарушении динамической устойчивости.
Критериями корректности работы функции релейной форсировки АРВ сильного действия являются:
- ввод релейной форсировки возбуждения без временной задержки при снижении напряжения на статоре генератора ниже 85 % от исходного значения;
- обеспечение поддержания потолочного значения напряжения возбуждения генератора вплоть до восстановления напряжения на статоре генератора до исходного значения12 или до нарушения динамической устойчивости.
Графики, характеризующие корректную работу АРВ сильного действия при нарушении динамической устойчивости и в предельном по устойчивости режиме, приведены на рисунках Д.31 и Д.32 соответственно.
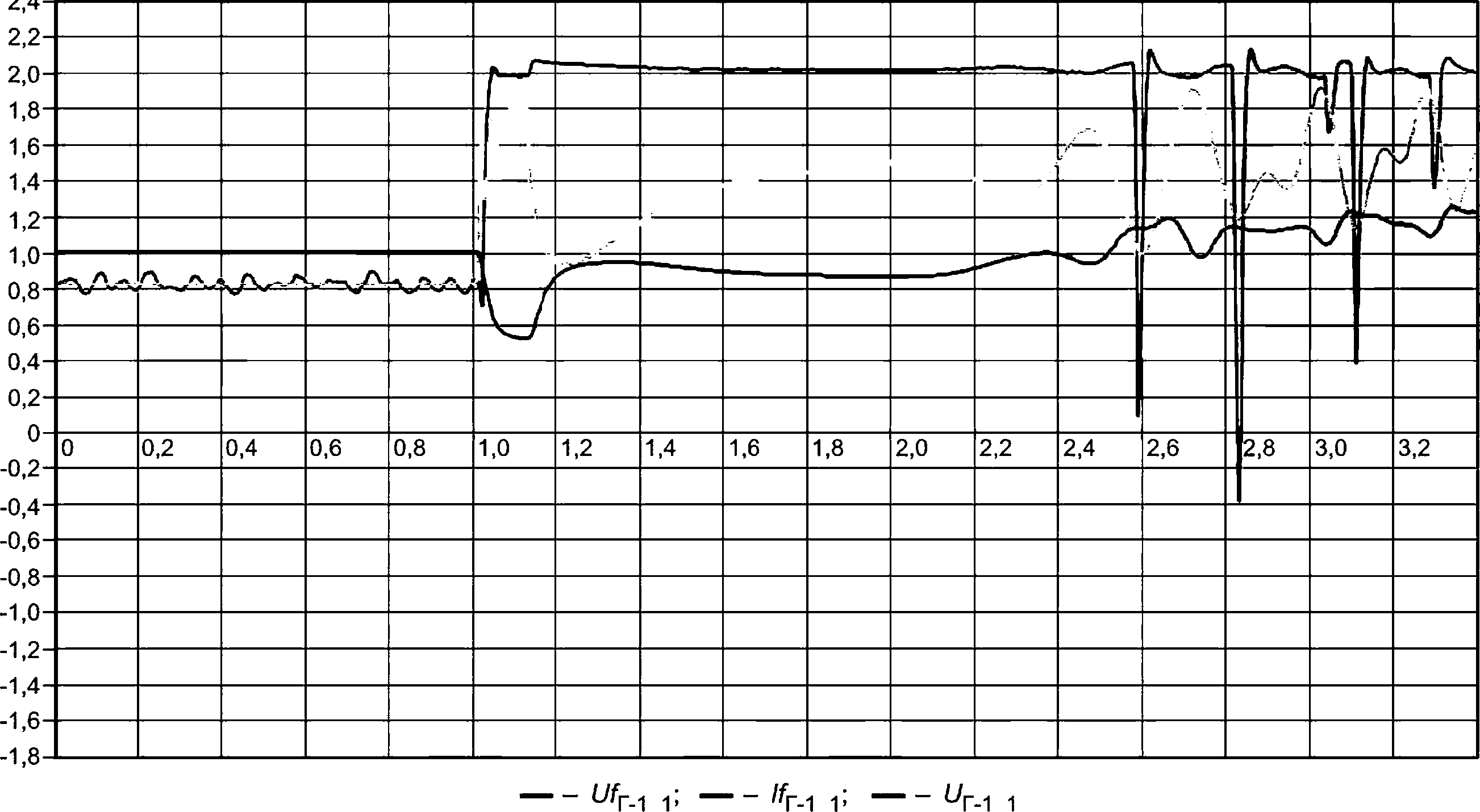
Рисунок Д.31 — Корректная работа АРВ сильного действия при нарушении динамической устойчивости
Д.4.2.7 В экспериментах 68, 69 выполняют проверку обеспечения эффективности работы АРВ сильного действия с учетом действия устройств и комплексов ПА.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения экспериментов 68, 69 является то, что устойчивость в послеаварийной схеме может быть обеспечена только за счет снижения перетока активной мощности от электрической станции № 1, для сохранения устойчивости через 0,4 с с момента возникновения КЗ должна срабатывать ПА, действующая на отключение Г-1_2 электрической станции № 1.
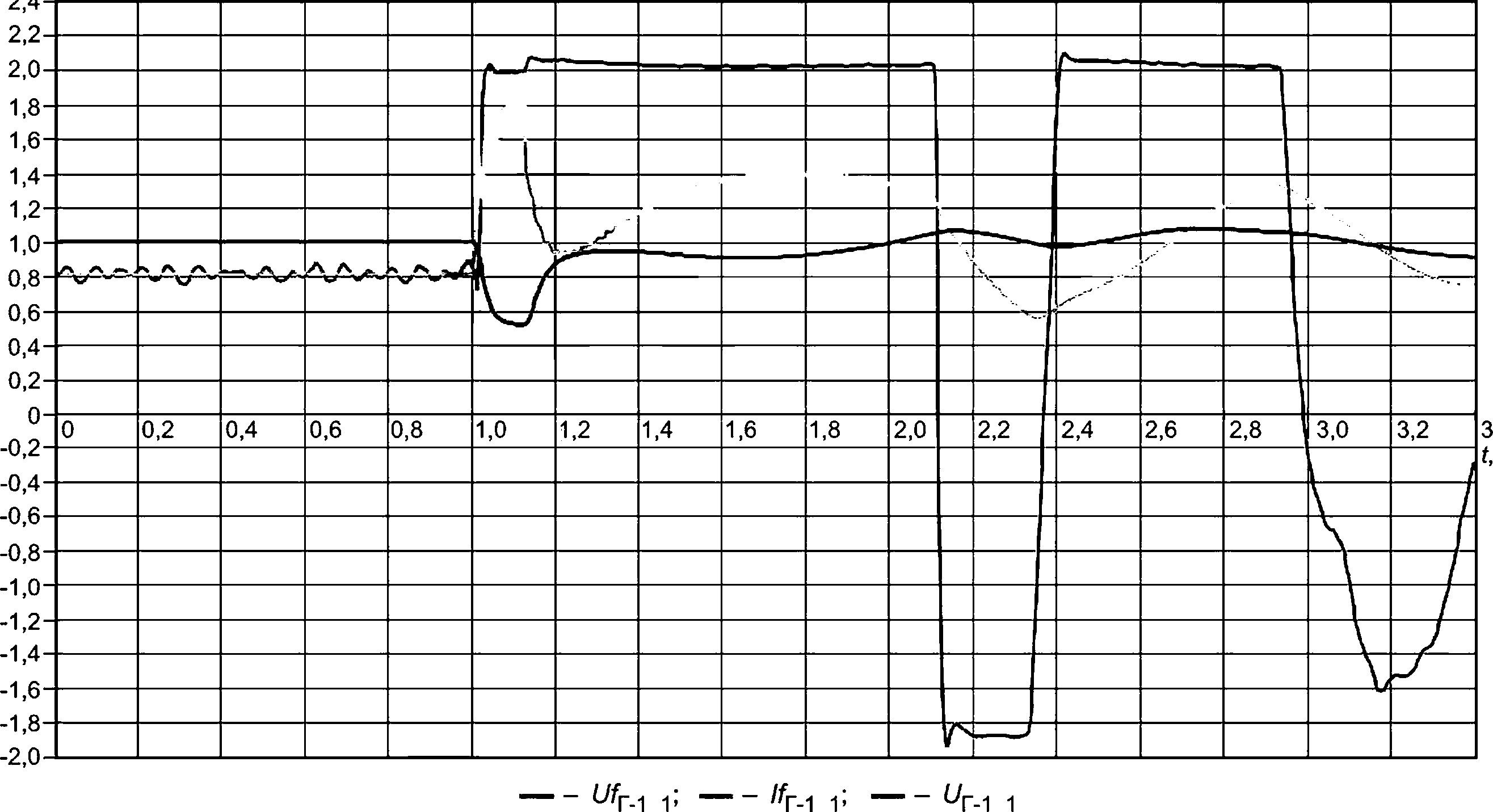
Рисунок Д.32 — Корректная работа АРВ сильного действия в предельном по устойчивости режиме
Критериями эффективной работы АРВ сильного действия с учетом действия устройств ПА являются:
- снижение времени затухания электромеханических переходных процессов при введенных каналах стабилизации (включенном системном стабилизаторе) по сравнению с временем затухания при выведенных каналах стабилизации (отключенном системном стабилизаторе);
- корректная работа функции релейной форсировки в соответствии с критериями, указанными в Д.4.2.6.
График, характеризующий корректную работу АРВ сильного действия с учетом работы устройств ПА, приведен на рисунке Д.ЗЗ.
и, /, о. е.
2,5-1
2,0-
1,5-
1,0-
0,5-
0-
-0,5-
-1,0-
-1,5-
-2,0-
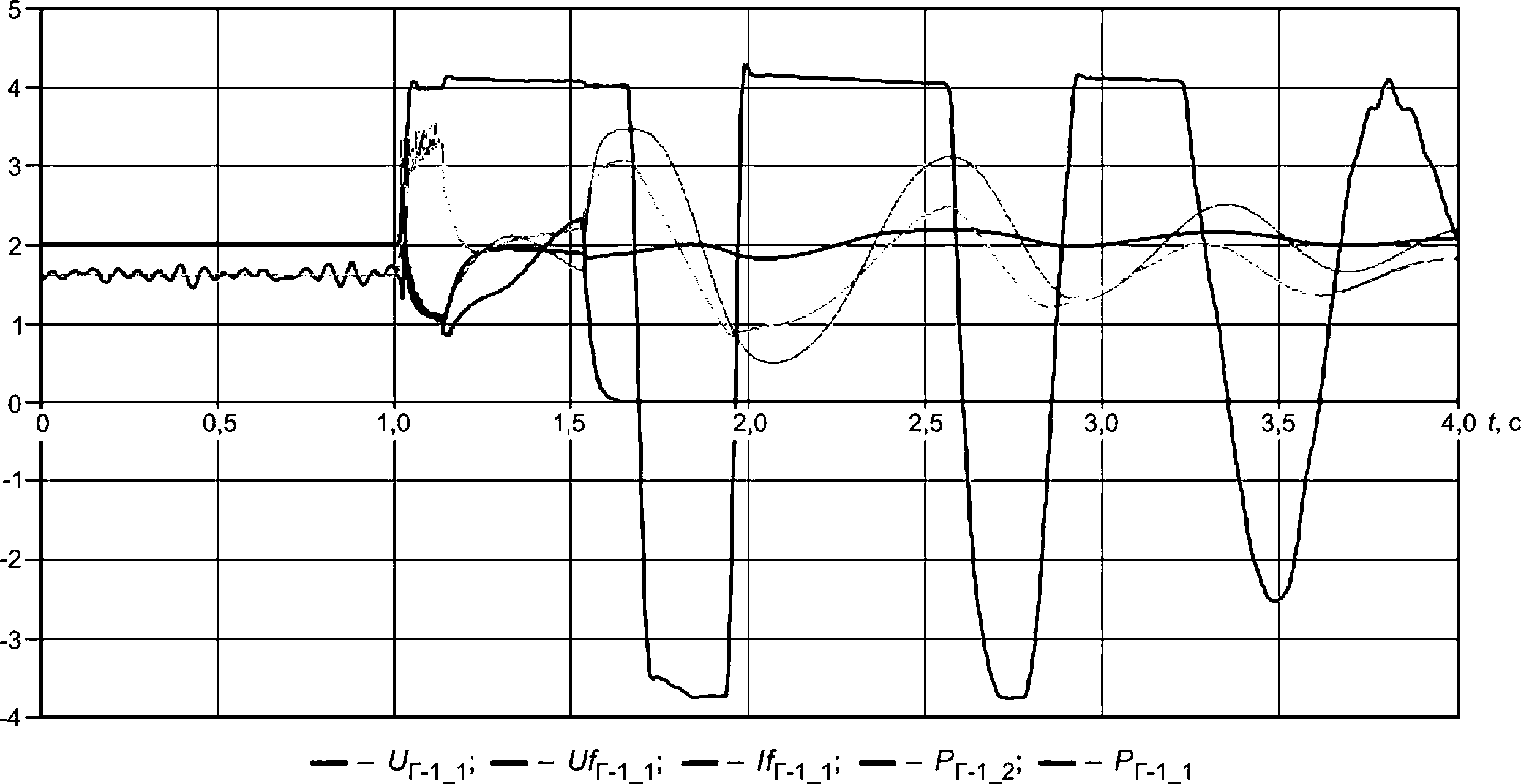
Рисунок Д.ЗЗ — Корректная работа АРВ сильного действия с учетом работы устройств ПА
Д.4.2.8 В экспериментах 70—74 выполняют проверку корректности работы ОМВ.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что ее выполняют в статическом и динамическом режимах. При проведении экспериментов 70—74 должна быть задана характеристика ОМВ в соответствии с таблицей Д.11.
Таблица Д.11—Характеристики ОМВ
Точка характеристики | Р, МВт | Q, Мвар |
1 | 0 | -600 |
2 | 1000 | -500 |
3 | 1500 | -390 |
4 | 2000 | -300 |
Критерием корректной работы АРВ сильного действия при функционировании ОМВ в статическом режиме (при медленном изменении напряжения в энергосистеме или при медленном увеличении активной мощности генератора без моделирования возмущения) является: вход в зону ОМВ, а также выход из зоны ОМВ имеет апериодический (неколебательный) характер.
Графики, характеризующие корректную работу АРВ сильного действия в статическом режиме при медленном изменении напряжения в энергосистеме и при медленном увеличении активной мощности генератора, приведены на рисунках Д.34 и Д.35 соответственно.
U, Q, Р,
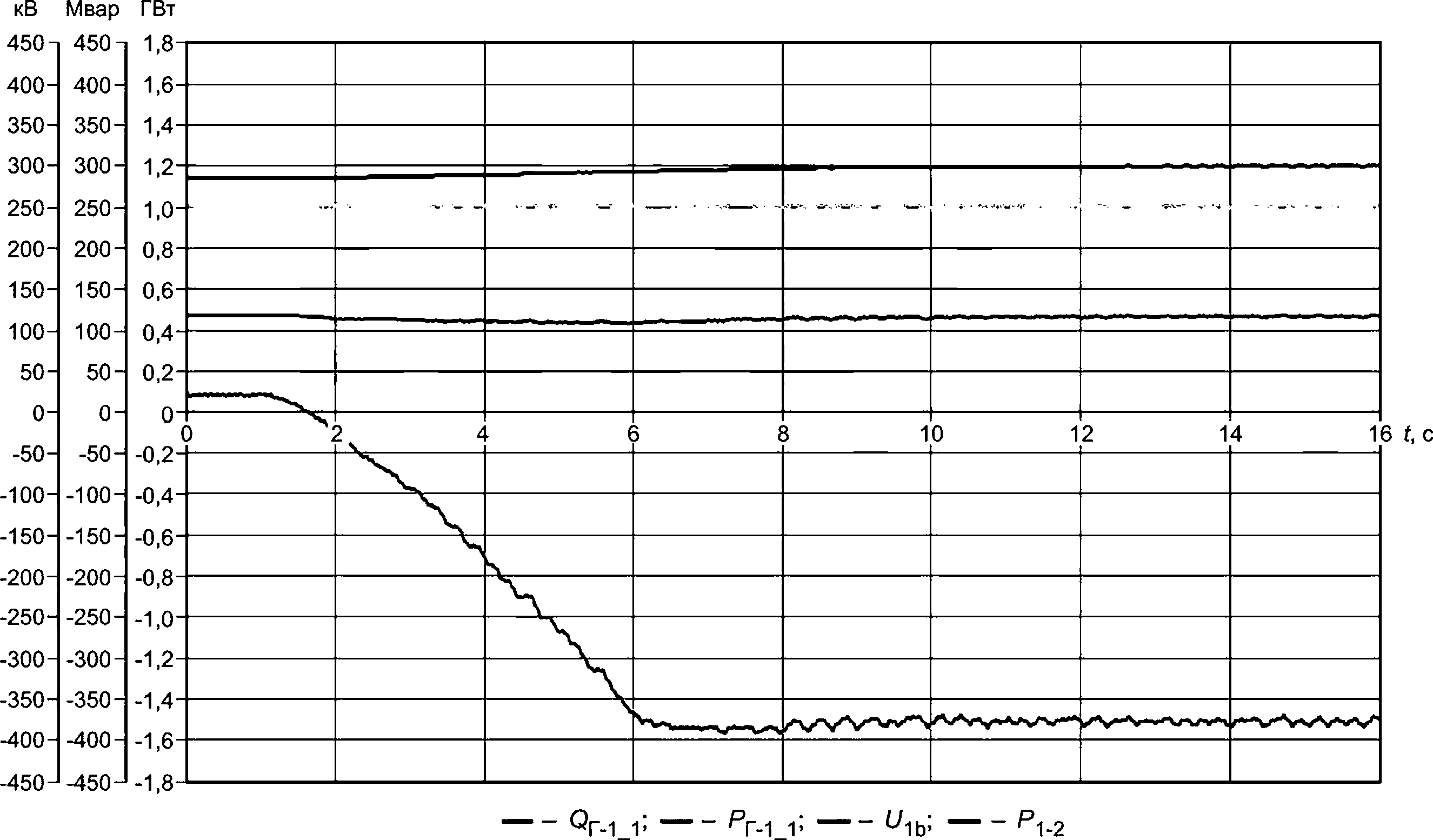
Рисунок Д.34 — Корректная работа АРВ сильного действия (плавного входа в зону ОМВ) в статическом режиме при медленном изменении напряжения в энергосистеме
Критерием корректной работы АРВ сильного действия при функционировании ОМВ в динамическом режиме (при изменении баланса реактивной мощности за счет включения и последующего (через 6—10 с) отключения емкости на шинах электрической станции № 1) является: вход в зону ОМВ в начальной фазе переходного процесса не должен приводить к превышению потребляемой синхронным генератором реактивной мощности более чем на 30 % по отношению к заданной уставке ОМВ.
и, Q, Р, о. е. Мвар ГВт | ||||||||||
IUUU | ||||||||||
2,U“ oUU" 2,U“ | ||||||||||
1,5- oOO" 1,5- 1,0- 400- 1,0- | ||||||||||
X" | '— | |||||||||
0,5- 200- 0,5- | X | |||||||||
0 U" 0" | J | 5 1 | 0 1 | 5 2 | 0 2 | 5 3 | 0 3 | 5 4 | 0 4 | 5 5 |
-U,5“ -2UU“ -U,O_ | _x | |||||||||
-1,0- -400- -1,0- | --- | 1 | ||||||||
-1,5“ -OUU- -1,5“ | ||||||||||
-Z,U“ -oUU- -2,0" -2,5-1-1000-*-2,5- | ||||||||||
--^Г-1_1’----°Г-1_1
Рисунок Д.35 — Корректная работа АРВ сильного действия (плавного входа в зону ОМВ) в статическом режиме при медленном увеличении активной мощности генератора
График, характеризующий корректную работу АРВ сильного действия при входе в зону ОМВ и выходе из зоны ОМВ в динамическом режиме, приведен на рисунке Д.36.
U, I, Q, Р,
о. e. Мвар ГВт d O_ ССЛ — d O-. | |||||||||||||||
1,0 OOU 1,0 •1 О- ЛЛЛ d O- | |||||||||||||||
1 ,Z OUU 1 ,Z 1 1- 550- 1 1- | — | ||||||||||||||
1,0- 500- 1,0- A A A CfX A A | fr | Lz | |||||||||||||
V | |||||||||||||||
U,y 45U U,y-A О ЛАЛ A О | |||||||||||||||
U,o 4UU U,O" A 7- OCA A 7_ | |||||||||||||||
U,/ OOU U,/ А С ОАЛ Л C | |||||||||||||||
U,O OUU U,O A C- OCA A C- | |||||||||||||||
U,O ZOU u,o | |||||||||||||||
0,4 200- 0,4- Л O_ A CA AO- | |||||||||||||||
U,0 1OU u,o- | |||||||||||||||
0,2“ 1UU 0,2“ Ad- CA л d - | |||||||||||||||
U, I OU U, I A- A- O- | |||||||||||||||
-0,1- -50- -0,1- AO d AA A О | J | 4 | 6 8 10 12 14 | V 16^-—18—20" 22 24 2 | |||||||||||
-U,2 - IUU - -U,2 A О- d CA- AO- | |||||||||||||||
-U,0 -J OU -U,0 Л А A A. | |||||||||||||||
-U,4“ -ZUU -U,4 A C_ OCA- A C- | |||||||||||||||
-U,5 -ZOU -U,0 л С ОАЛ A a | |||||||||||||||
-U,0 -OUU -u,o A 7- OCA - A 7- | |||||||||||||||
-u,/ -OOU -U,7 | |||||||||||||||
-0,8 -400 -0,8 Л А Л СГ\ A A | |||||||||||||||
-U,y -4OU -U,y d А СЛЛ d A | |||||||||||||||
-1,U“ -OUU -1,U“ d d CCA - d d | |||||||||||||||
-1,1 “ -OOU “ -1,1 | |||||||||||||||
- 1 ,Z“ -OOU “ - 1 -1,3-1 -650 J-1,3- | _ | ||||||||||||||
- Рг.-|_-|;--Qr-i_i:----^г-1_1
Рисунок Д.36 — Корректная работа АРВ сильного действия при входе в зону ОМВ и выходе из зоны ОМВ в динамическом режиме
Работа в зоне ОМВ не должна сопровождаться колебаниями тока возбуждения и реактивной мощности. Если в эксперименте с введенными каналами стабилизации (включенным системным стабилизатором) будут наблюдаться колебания тока возбуждения и реактивной мощности, то в алгоритм функционирования АРВ сильного действия следует ввести блокировку каналов стабилизации (системного стабилизатора) при переходе в зону ОМВ.
Д.4.2.9 В экспериментах 75—77 выполняют проверку корректности работы ограничителя двукратного тока ротора.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения эксперимента 75 является то, что для АРВ сильного действия, у которых реализован ограничитель двойного тока ротора для БСВ, следует дополнительно регистрировать расчетный ток ротора, определяемый по диаграмме Потье.
Критериями корректности работы двукратного тока ротора при проведении эксперимента 75 являются:
- ограничитель двойного тока ротора должен вступать в работу без выдержки времени и перерегулирования (см. рисунок Д.37);
- обеспечивается совпадение установившегося, измеренного и расчетного значений тока ротора (см. рисунок Д.38).
Особенностью проведения экспериментов 76 и 77 является то, что при проверке необходимо обеспечить выполнение следующих условий:
- ввод ограничения двукратного тока ротора должен выполняться с выдержкой времени, достаточной для затухания периодических токов, вызванных близкими КЗ, не препятствуя вводу релейной форсировки возбуждения;
- задержка времени на ввод ограничителя двукратного тока ротора должна иметь возможность регулирования в диапазоне от 100 до 600 мс.
Критериями корректности работы двукратного тока ротора экспериментов 76 и 77 являются:
- ограничитель должен вступать в работу с заданной (от 100 до 600 мс) выдержкой времени;
- ограничение тока ротора должно осуществляться без перерегулирования (ограничитель должен ограничивать ток ротора на заданном уровне уставки).
Графики, характеризующие корректную работу ограничителя двукратного тока ротора при моделировании затянувшегося двухфазного КЗ на землю вблизи шин ЭС № 1 и при моделировании серии из двух двухфазных последовательных КЗ на землю вблизи шин ЭС № 1, приведены на рисунках Д.39 и Д.40 соответственно.
и, I, о. е.
м Ла | |||||||||
V V • | |||||||||
0 1 23456789 10
--Ц--1 •--^Г-1 ’--^Г-1 С
а)
к | |||||||||
/1 Л л | . л _ 1 | * (Г | |||||||
iV \УЛд | r\lVy | 1/ - | V | ----V-^— | |||||
1 |
0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
--^Г-1^--^Г-1>--^Г-1 с
U, I, о. е.
б)
Примечание — Уставка ограничителя задана на уровне 1,1 lfH0M.
Рисунок Д.37 — Корректная работа ограничителя двукратного тока ротора при подаче тестового сигнала на увеличение уставки по напряжению генератора на 30 %
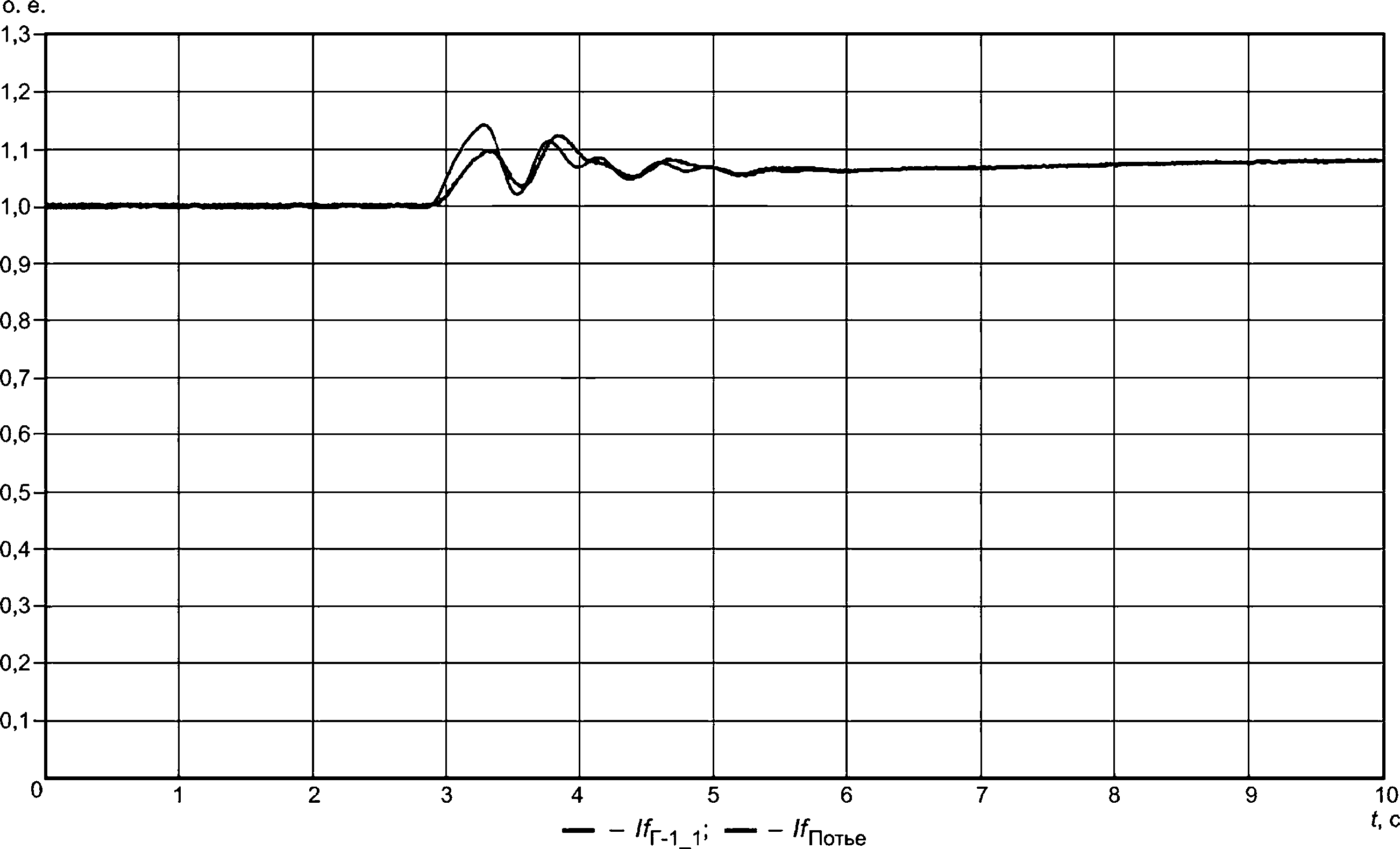
Примечание — Уставка ограничителя задана на уровне 1.1 /^ном-
Рисунок Д.38 — Корректная работа ограничителя двукратного тока ротора при подаче тестового сигнала на увеличение уставки по напряжению генератора на 30 %
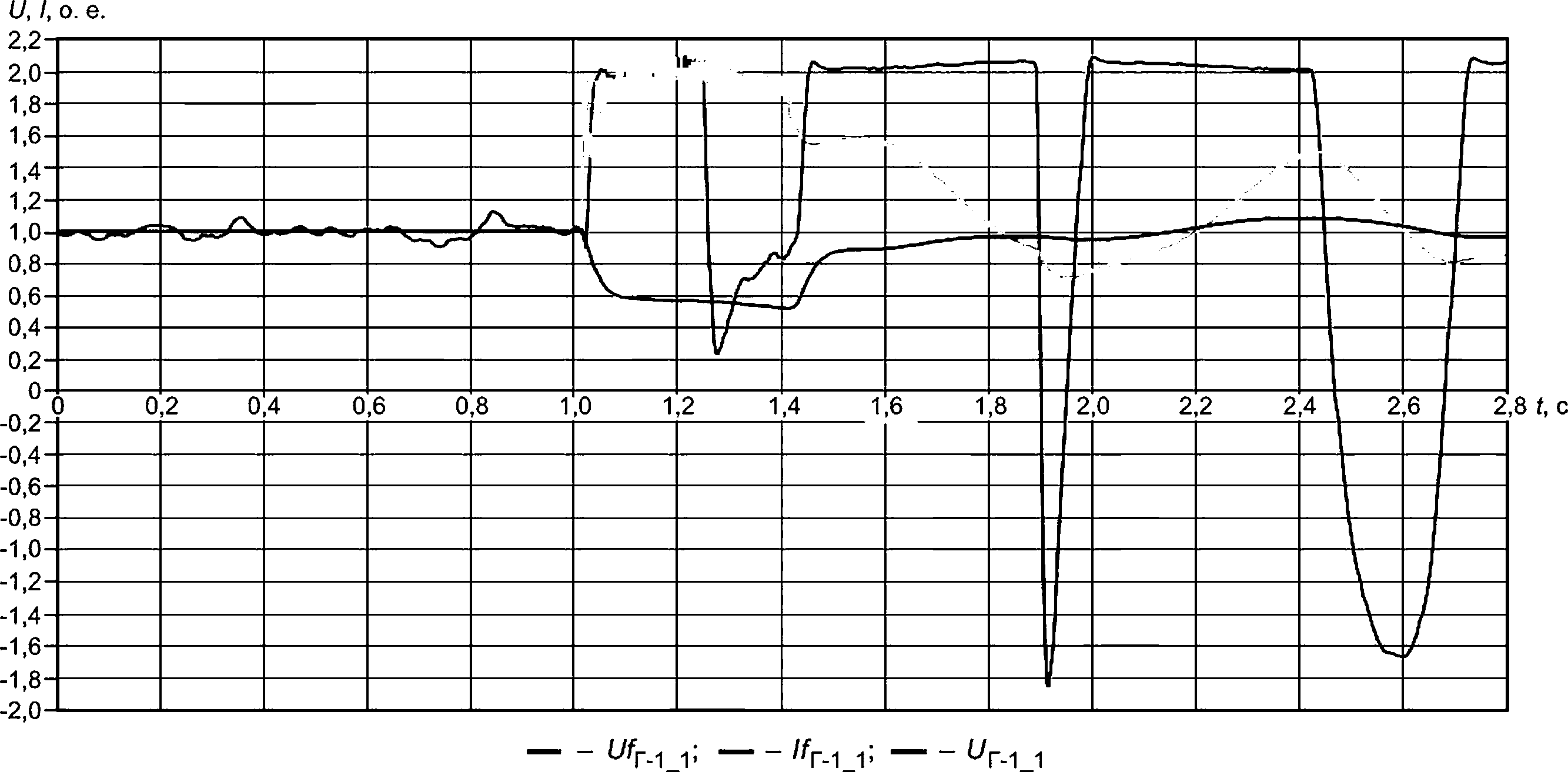
Примечание — Уставка ограничителя задана на уровне 2/fH0M.
Рисунок Д.39 — Корректная работа ограничителя двукратного тока ротора при моделировании затянувшегося двухфазного КЗ на землю
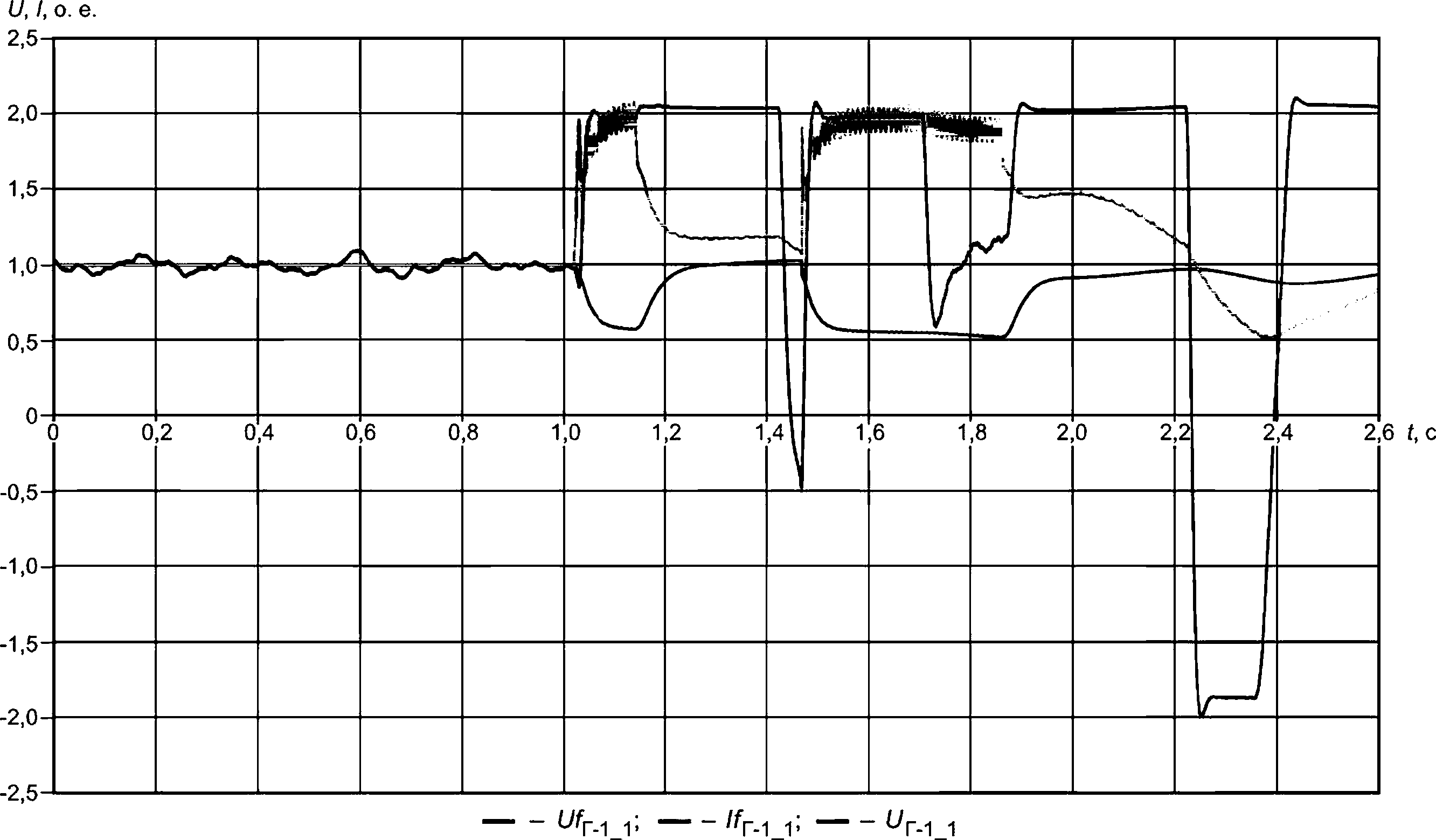
Примечание — Уставка ограничителя задана на уровне 2/fH0M.
Рисунок Д.40 — Корректная работа ограничителя двукратного тока ротора при моделировании серии из двух двухфазных КЗ на землю
Д.4.2.10 В экспериментах 78—88 выполняют проверку обеспечения эффективности работы АРВ сильного действия в схеме укрупненного блока.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что она выполняется посредством подачи тестовых возмущений при:
- введенных и выведенных на обоих тестируемых АРВ сильного действия каналах стабилизации (включенном и выключенном системном стабилизаторе);
- введенных каналах стабилизации (включенном системном стабилизаторе) только на одном из АРВ сильного действия.
Критериями корректности работы АРВ сильного действия во всех экспериментах является:
- устойчивость регулирования реактивной мощности и стабилизации режима при совместной работе двух регуляторов в составе укрупненного блока синхронных генераторов;
- корректность распределения реактивной мощности между синхронными генераторами, объединенными в одной точке на генераторном напряжении;
- отсутствие внутригрупповой неустойчивости;
- восстановление исходной загрузки синхронных генераторов по реактивной мощности после снятия тестовых возмущений;
- отсутствие возникновения и развития взаимных колебаний между синхронными генераторами при тестовых возмущениях.
График, характеризующий корректную работу АРВ сильного действия, приведен на рисунке Д.41.
Д.4.2.11 В эксперименте 89 выполняют проверку корректности работы ограничителя напряжения ротора бесщеточного возбудителя.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что для исключения срабатывания ограничителя двукратного тока возбуждения бесщеточного возбудителя уставка этого ограничителя при проведении эксперимента 89 должна быть задана большей (в относительных единицах), чем уставка ограничителя напряжения ротора. Для АРВ сильного действия, в которых имеется ограничитель двукратного тока ротора, для предотвращения его срабатывания следует ввести максимальную задержку по времени на ввод этого ограничителя.
Критерий корректности работы ограничителя напряжения ротора: ограничение напряжения ротора должно осуществляться без перерегулирования.
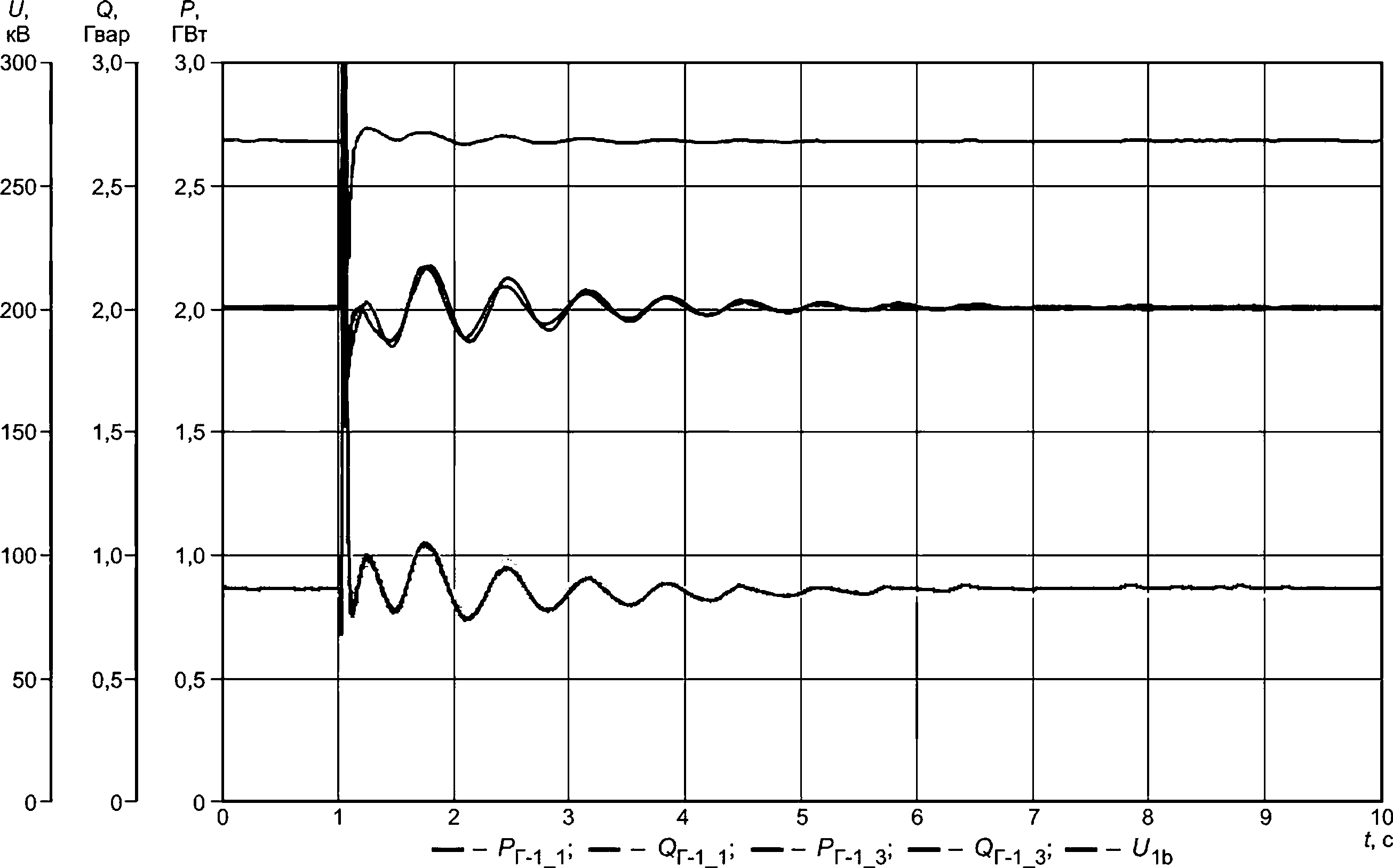
Рисунок Д.41 — Корректная работа АРВ сильного действия при однофазном КЗ на шинах электрической станции № 1 при совместной работе двух регуляторов в составе укрупненного блока синхронных генераторов
График, характеризующий корректную работу ограничителя напряжения ротора при моделировании затянувшегося трехфазного КЗ на землю, приведен на рисунке Д.42.
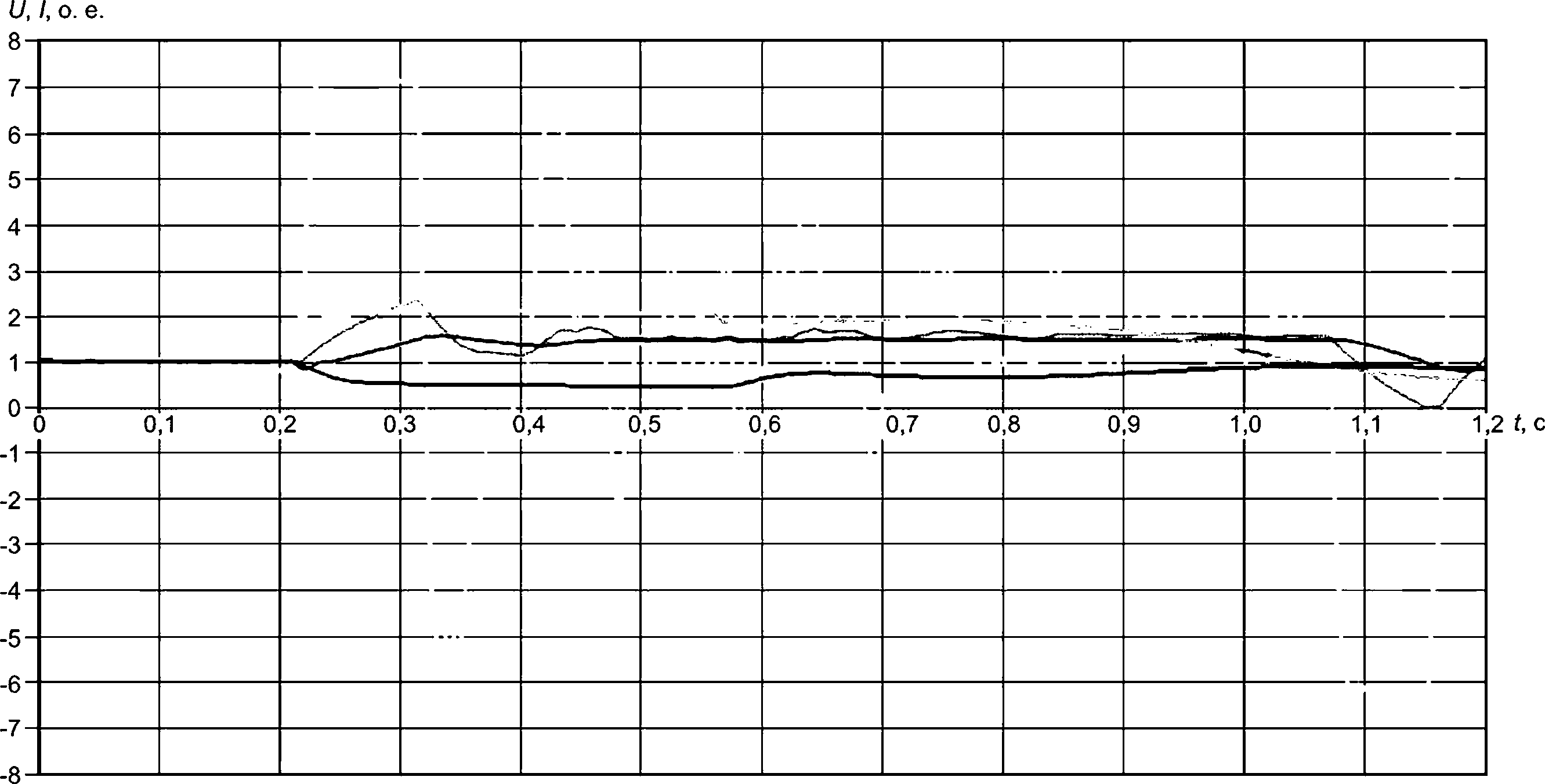
- ----^г-1_1:----^г-1_1
Примечание — Уставка ограничителя напряжения ротора задана на уровне 1,5L/fH0M (уставка ограничителя максимального тока возбуждения бесщеточного возбудителя задана на уровне 3/fH0M).
Рисунок Д.42 — Корректная работа ограничителя напряжения ротора при моделировании трехфазного затянувшегося КЗ вблизи шин электрической станции № 1
Д.4.2.12 В эксперименте 90 выполняют проверку корректности работы ограничителя двукратного тока возбуждения бесщеточного возбудителя.
Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1). Особенностью проведения проверки является то, что для исключения срабатывания ограничителя напряжения ротора уставка этого ограничителя при проведении эксперимента 90 должна быть задана большей (в относительных единицах), чем уставка ограничителя тока возбуждения бесщеточного возбудителя. Для АРВ сильного действия, в которых имеется ограничитель двукратного тока ротора, для предотвращения его срабатывания следует ввести максимальную задержку по времени на ввод этого ограничителя.
Критерий корректности работы двукратного тока возбуждения бесщеточного возбудителя: ограничение двукратного тока возбуждения бесщеточного возбудителя должно осуществляться без перерегулирования.
График, характеризующий корректную работу ограничителя двукратного тока возбуждения бесщеточного возбудителя при моделировании затянувшегося трехфазного КЗ на землю, приведен на рисунке Д.43.
и, 1, о. е. | |||||||||||||||
о,и 7 С | |||||||||||||||
(,0 | |||||||||||||||
7,0 а с— | |||||||||||||||
0,0 Д А— | |||||||||||||||
о,и | |||||||||||||||
5,5" С Л — | |||||||||||||||
о,и л | |||||||||||||||
4,0 Л Л- | |||||||||||||||
4.U" о К | |||||||||||||||
0,0 | |||||||||||||||
3,0 о е | |||||||||||||||
Z,0 2,0- | — . ■ .— | ||||||||||||||
1,5- 1,0- | — | ____ | ___ | ___ | - | - | |||||||||
0,5-А | |||||||||||||||
-0,5-и А | л | А 1 | А 9 | 0,3-- | 0,4--- | 0,5-- | л Я | А 7 | А Я | А О | i А | 1,1-- | 1,2--1 | 3 Г, с | |
и | U, I | и,о | U, f | и,О | I ,и | ||||||||||
- I -1 R | |||||||||||||||
0 А | |||||||||||||||
-Z,U О с | |||||||||||||||
-Z,O" | |||||||||||||||
-3,0" о Я | |||||||||||||||
-0,0 Л (\ | |||||||||||||||
-4,U .Л R- | |||||||||||||||
-4,0 СЛ_ | |||||||||||||||
-о,и С. Я | |||||||||||||||
-0,0 Л А | |||||||||||||||
-о,и a cz | |||||||||||||||
-0,0" 7 Л | |||||||||||||||
•( ,и 7 Я | |||||||||||||||
-г ,0 Q А | |||||||||||||||
-о,и -8,5J | I—— | ||||||||||||||
- ^Е-1_Ц--^Е-1_1’--^Г-1_<--^Г-1_1:--^Г-1_1
Примечание — Уставка ограничителя двукратного тока возбуждения бесщеточного возбудителя задана на уровне 2/fH0M (уставка ограничителя напряжения ротора задана на уровне 3l/fH0M).
Рисунок Д.43 — Корректная работа ограничителя двукратного тока возбуждения бесщеточного возбудителя при моделировании трехфазного затянувшегося КЗ вблизи шин электрической станции № 1
Д.4.2.13 В эксперименте 91 выполняют проверку корректности расчета тока ротора по диаграмме Потье. Условия проведения указанной проверки приведены в описании соответствующих экспериментов (см. таблицу Д.1).
Критерием корректности реализации алгоритма расчета тока ротора является: расчетное по диаграмме Потье значение тока ротора не должно отличаться от измеренного:
- по фазе — не более чем на 30°;
- по амплитуде — не более чем на 20 %.
График, характеризующий корректную работу АРВ сильного действия, на котором измеренное и расчетное по диаграмме Потье значения тока ротора фактически совпадают, приведен на рисунке Д.44.
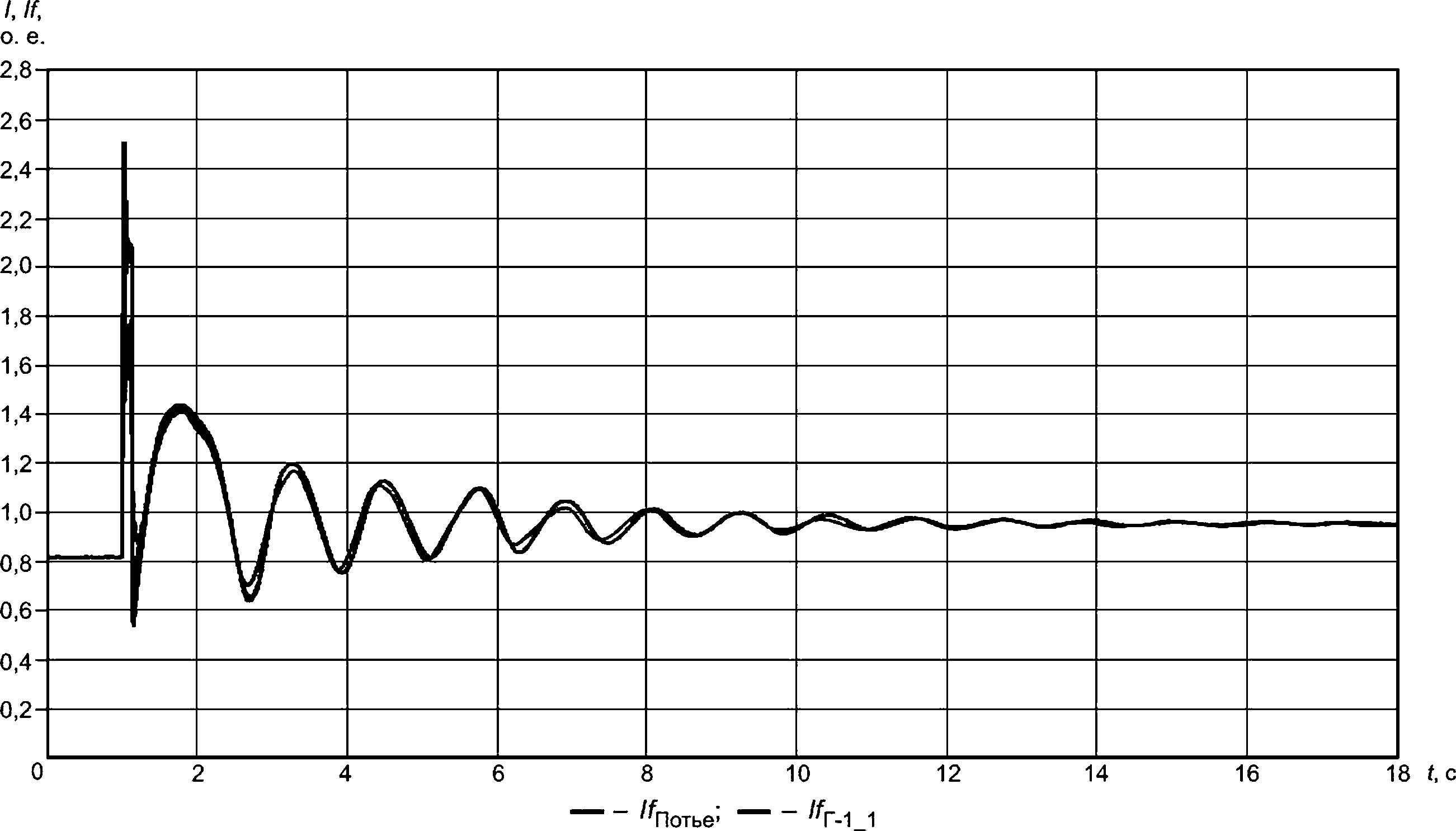
Рисунок Д.44 — Корректная реализация алгоритма расчета тока ротора по диаграмме Потье
Библиография
[1] Правила технологического функционирования электроэнергетических систем (утверждены постановлением Правительства Российской Федерации от 13 августа 2018 г. № 937)
[2] Требования к системам возбуждения и автоматическим регуляторам возбуждения сильного действия синхронных генераторов (утверждены приказом Минэнерго России от 13 февраля 2019 г. № 98)
[3] Требования к обеспечению надежности электроэнергетических систем, надежности и безопасности объектов электроэнергетики и энергопринимающих установок «Методические указания по устойчивости энергосистем» (утверждены приказом Минэнерго России от 3 августа 2018 г. № 630)
УДК 621.311:006.354
ОКС 27.010
29.160.20
Ключевые слова: автоматический регулятор возбуждения сильного действия синхронного генератора, модель энергосистемы, испытания, параметры настройки
Редактор Н.В. Таланова
Технический редактор И.Е. Черепкова
Корректор О.В. Лазарева
Компьютерная верстка Л.А. Круговой
Сдано в набор 09.01.2023. Подписано в печать 25.01.2023. Формат 60x84%. Гарнитура Ариал.
Усл. печ. л. 13,02. Уч.-изд. л. 11,07.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
1
Для тиристорных СВ; для БСВ, АРВ сильного действия которых имеют этот ограничитель.
2
Для БСВ.
3
Для АРВ сильного действия, в которых ток ротора, рассчитанный по диаграмме Потье, используется для формирования параметра стабилизации.
4
Выполнение данного требования обеспечивается посредством выбора уставки снятия релейной форсировки возбуждения и временной задержки на снятие релейной форсировки возбуждения.
5
Для возможности работы с образцами АРВ, в которых выходной сигнал представлен широтно-импульсной модуляцией.
6
Комплексная нагрузка — нагрузка, включающая шунтовую и асинхронную нагрузку.
7
Математическая модель АРВ-П получается из математической модели АРВ-СД подстановкой соответствующих коэффициентов, приведенных в таблице Д.10.
8
Для тиристорных СВ; для БСВ, АРВ сильного действия которых имеют этот ограничитель.
9
Для БСВ.
10
Для АРВ сильного действия, в которых ток ротора, рассчитанный по диаграмме Потье, используется для формирования параметра стабилизации.
11
С момента времени, соответствующего:
- в экспериментах 39, 40, 45—48, 51, 52 — отключению линии Л-2;
- в экспериментах 41,42 — включению поврежденной фазы линии Л-2;
- в экспериментах 43, 44 — включению линии Л-2;
- в экспериментах 49, 50 — повторному отключению линии Л-2.
12
Указанное требование обеспечивается посредством выбора уставки снятия релейной форсировки возбуждения и временной задержки на снятие релейной форсировки возбуждения.
