ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТР
71734—
2024
РЕЗОНАТОРЫ ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
Методы измерения динамических параметров
Издание официальное
Москва Российский институт стандартизации 2024
ГОСТ Р 71734—2024
Предисловие
1 РАЗРАБОТАН Акционерным обществом «Российский научно-исследовательский институт «Электронстандарт» (АО «РНИИ «Электронстандарт»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 303 «Электронная компонентная база, материалы и оборудование»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 октября 2024 г. № 1510-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
©Оформление. ФГБУ «Институт стандартизации», 2024
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 71734—2024
Содержание
1 Область применения..................................................................1
2 Нормативные ссылки..................................................................1
3 Термины и определения................................................................2
4 Общие положения....................................................................2
5 Методы измерения динамических параметров.............................................4
Приложение А (справочное) Перечень аппаратуры, рекомендуемой для измерения динамических параметров пьезоэлектрических резонаторов.....................14
Приложение Б (справочное) Примеры расчета.............................................17
Библиография........................................................................20
III
ГОСТ Р 71734—2024
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЕЗОНАТОРЫ ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
Методы измерения динамических параметров
Piezoelectric resonators. Methods for measuring dynamic parameters
Дата введения — 2025—03—01
1 Область применения
Настоящий стандарт распространяется на пьезоэлектрические резонаторы, изготовленные из природного или синтетического кварца и других пьезокристаллических материалов, работающие в диапазоне частот 4 кГц — 300 МГц (далее — резонаторы), и устанавливает четыре метода измерения динамических параметров эквивалентной схемы резонатора:
а) динамической индуктивности Ц;
б) динамической емкости Ср
в) динамического сопротивления ^;
г) добротности Q.
Метод 1 — метод затухания свободных колебаний, применяемый для низкочастотных резонаторов с ненормируемой мощностью рассеяния.
Метод 2 — генераторный метод (активного возбуждения), применяемый для всего диапазона частот с нерегулируемой и ограниченной сверху мощностью рассеяния.
Метод 3 — фазовый сдвиг в П-образном четырехполюснике (пассивного возбуждения), применяемый для резонаторов не более 200 МГц (с любым условием по величине мощности рассеяния, в том числе и при пониженном уровне).
Метод 4 — метод коэффициента передачи с полупассивным возбуждением, применяемый в диапазоне частот не более 300 МГц с нерегулируемой и ограниченной мощностью рассеяния.
Применение этих методов к конкретному типу резонаторов и конкретные требования или дополнения к ним должны быть указаны в технических условиях (ТУ) на конкретные типы резонаторов.
Настоящий стандарт содержит общие требования для методов измерения динамических параметров резонаторов.
Настоящий стандарт предназначен для применения предприятиями, организациями и другими субъектами научной и хозяйственной деятельности независимо от форм собственности и подчинения, а также федеральными органами исполнительной власти Российской Федерации, участвующими в разработке, производстве, эксплуатации пьезоэлектрических резонаторов, в соответствии с действующим законодательством.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 20.57.406 Комплексная система контроля качества. Изделия электронной техники, квантовой электроники и электротехнические. Методы испытаний
ГОСТ 27463 Система обработки информации. 7-битные кодированные наборы символов
ГОСТ Р 57438 Приборы пьезоэлектрические. Термины и определения
Издание официальное
1
ГОСТ Р 71734—2024
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 57438.
4 Общие положения
4.1 Условия и режим измерения
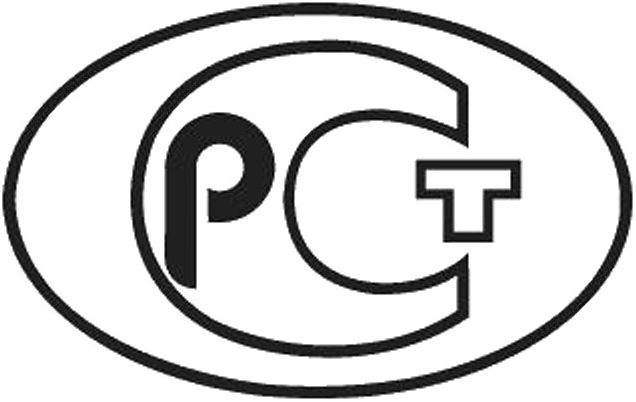
4.1.1 Измерение динамических параметров резонаторов, эквивалентная схема которых приведена на рисунке 1, проводят в нормальных климатических условиях по ГОСТ 20.57.406 или в условиях, установленных в стандартах и ТУ на резонаторы конкретных типов.
L^ —динамическая индуктивность; С1 —динамическая емкость; R1 —динамическое сопротивление; Со — статическая емкость
Рисунок 1
4.1.2 Измерения следует проводить при заданных уровнях возбуждения или мощности рассеяния на резонаторах.
4.1.3 Корпус резонатора в процессе измерения должен быть под потенциалом земли (трехвыводное включение). Для резонаторов в стеклянных корпусах применяют металлический экранирующий кожух с внутренними размерами 40 х 40 мм, высота — не менее 30 мм. Резонаторы устанавливают в центре экранирующего кожуха.
При измерениях с компенсацией статической емкости Со корпус не заземляют (двухвыводное включение) и экранирующий кожух не применяют, так как внутренние емкости на корпус включаются в параллельную емкость Со.
Примечание — Способ включения резонатора при измерениях указывают в ТУ.
4.1.4 Для учета влияния индуктивности выводов резонатора необходимо установить расположение базовой плоскости подключения при измерениях, которая определена расстоянием от плоскости выхода штырьков из резонатора до места подключения и может быть обеспечена конструкцией устройства подключения.
4.1.5 Резонаторы перед измерением динамических параметров должны быть выдержаны в нормальных климатических условиях или условиях, установленных в стандартах или ТУ на резонаторы конкретных типов, в течение не менее 2 ч.
2
ГОСТ Р 71734—2024
4.1.6 Измерение динамических параметров термостатированных резонаторов проводят после их выдержки в термостате при заданной в ТУ температуре настройки в течение не менее 15 мин.
Допускается предварительный нагрев резонатора в термостате.
4.1.7 Во время измерения резонаторы не должны подвергаться воздействию потоков воздуха, прямых солнечных лучей и других воздействий, которые могут привести к изменению параметров.
4.2 Аппаратура
4.2.1 Измерение динамических параметров резонаторов проводят на установках, состоящих из средств измерений, прошедших государственные или ведомственные приемочные испытания в соответствии с государственными или отраслевыми нормативно-техническими документами, позволяющих проводить калибровку и обеспечивающих измерение в требуемых диапазонах рабочих частот.
4.2.2 Генератор синусоидального сигнала (синтезатор) должен обеспечивать:
- ослабление спектральных составляющих с частотами, кратными частоте питающей сети в спектре выходного сигнала, — не менее 60 дБ;
- уровень шума паразитных колебаний и гармоник — не менее 40 дБ;
- стабильность частоты — в пределах ±1 • 10-6;
- погрешность установки выходного напряжения — в пределах ±5 %;
- максимально возможный уровень выходной мощности — не менее номинального уровня возбуждения резонатора +24 дБ, который должен регулироваться в пределах 0—70 дБ.
4.2.3 Устройство выносное, блок параметров (П-образный четырехполюсник, Г- и Т-образные четырехполюсники, мостовые схемы):
а) должны иметь выводы (гнезда для подключения резонаторов), паразитные емкости, между которыми должны быть не менее чем в 10 раз меньше статической емкости испытуемых резонаторов:
- индуктивность — в пределах (1,0—60) • 10-9 Гн,
- активное сопротивление — в пределах (0,01—1) Ом;
б) фазовая характеристика устройства на высшей частоте диапазона в зависимости от сопротивления, изменяющегося в диапазоне сопротивлений измеряемых резонаторов, должна быть в пределах ±5° от фазы, измеренной с сопротивлением 20 Ом, и в зависимости от уровня возбуждения, от 5 мкВт до 5 мВт с сопротивлением 25 Ом, не должна отклоняться более чем ±5° от фазы измеренной при 0,5 мВт;
в) допускается иметь в комплекте:
- эталонные резисторы с допуском ±0,5 %,
- закорачивающую пластину,
- комплект нагрузочных измерительных емкостей с допуском не более ±1 %;
г) в диапазоне частот свыше 100 МГц должны обеспечивать компенсацию статической емкости Со в пределах не менее 10 пФ.
4.2.4 Частотомер электронно-счетный должен обеспечивать измерение частоты с погрешностью в пределах 0,1 от допустимого по ТУ на резонаторы отклонения.
4.2.5 Фазометр — измеритель разности фаз (векторный вольтметр) должен удовлетворять следующим требованиям:
а) погрешность индикации нуля фазового сдвига при условии изменения отношения напряжения в каналах до 1:5 — не более 0,2°;
б) чувствительность в измерительном канале по уровню напряжения — не более 0,02 дБ.
4.3 Показатели точности измерений
4.3.1 Показатели точности измерения динамических параметров резонаторов должны соответствовать установленным в стандартах или ТУ на резонаторы конкретных типов.
4.3.2 Если в аппаратуре специального отраслевого назначения нормируется воспроизводимость измерения, определяемая при их метрологической аттестации, то при наличии образцовых мер измеряемой величины (калибровки), позволяющих исключить в процессе измерения систематическую погрешность, погрешность средств измерения определяется ее воспроизводимостью или среднеквадратическим отклонением случайной погрешности.
4.4 Требования безопасности
Организация и порядок проведения измерения электрических параметров резонаторов должны быть осуществлены в соответствии с [1] (раздел К).
3
ГОСТ Р 71734—2024
5 Методы измерения динамических параметров
5.1 Метод затухания свободных колебаний
5.1.1 Принцип и условия измерений
5.1.1.1 Метод измерения динамических параметров эквивалентной схемы резонатора основан на использовании существующей зависимости добротности и времени затухания свободных колебаний возбужденного электрического контура и сводиться к измерению периода времени, за который свободно затухающие колебания резонатора уменьшаются по уровню в заданных пределах.
5.1.1.2 Метод распространяется на резонаторы в диапазоне нижних частот.
5.1.1.3 Общие положения при измерениях в соответствии с разделом 4.
5.1.2 Аппаратура
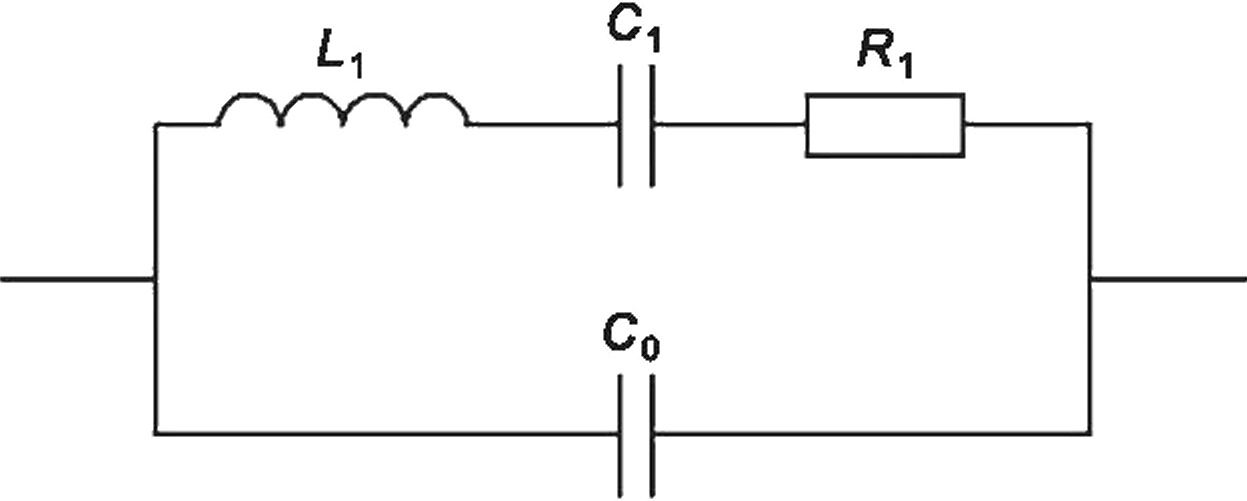
5.1.2.1 Измерения следует проводить на установке, структурная схема которой приведена на рисунке 2.
А — измеритель параметров резонаторов; Е — выносное устройство — П-образный четырехполюсник; G — генератор; В — блок электронного переключателя; PF — электронно-счетный частотомер; XS1, XS2 — гнезда для подключения резонаторов; XS3, XS4 — гнезда для подключения калибровочных элементов
Рисунок 2
5.1.2.2 Измеритель динамических параметров должен обеспечивать измерение эквивалентных динамических параметров резонаторов с добротностями: не менее 10 000 в диапазоне частот 1 кГц— 1 МГц; не менее 20 000 в диапазоне 1—5 МГц и не менее 50 000 в диапазоне 5—10 МГц с прямым отсчетом добротности резонатора, работающего в режиме предельного узкополосного фильтра, дискретно регулируемого нагрузочным сопротивлением.
5.1.2.3 Частотомер электронно-счетный должен удовлетворять соответствующему частотному диапазону, наличию режима работы измерения отношения частоты и периода.
Относительная погрешность частоты опорного генератора должна находиться в пределах ±5 • 10—7.
5.1.3 Подготовка и проведение измерений
5.1.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
5.1.3.2 Устанавливают резонатор в гнезда XS1, XS2 выносного устройства и перемычку в гнезда XS3, XS4.
5.1.3.3 Настраивают генератор на резонансную частоту испытуемого резонатора, добиваясь регулировкой уровня возбуждения положения стрелки на определенной отметке.
5.1.3.4 Устанавливают переключатель «Род работы» в положение измерения частоты F и проводят отсчет резонансной частоты fr.
5.1.3.5 Устанавливают переключатель «Род работы» в положение измерения добротности Q и нажатием кнопки «Пуск» проводят срыв автоколебаний — резонатор работает в режиме затухающих свободных колебаний, а электронно-счетный частотомер (ЭСЧ) проводит отсчет числа периодов затухающих колебаний резонатора, по показанию ЭСЧ, умноженному на 10, рассчитывают добротность Q в относительных единицах не менее трех раз.
4
ГОСТ Р 71734—2024
За результат измерений принимают среднее арифметическое значение
^1 + ^2 + ^3 3
(1)
где Q^ Q2, Q3 — отсчеты значений единичных значений добротности.
5.1.3.6 Вводят переключателем эталонных сопротивлений (на выносном устройстве) сопротивление в цепь затухания свободных колебаний резонатора, при этом уровень возбуждения восстанавливают до значения, соответствующего его значению в 5.1.3.5, и проводят измерение добротности в соответствии с 5.1.3.5, выбирая значение вводимого эталонного сопротивления R^, Ом, чтобы новое значение добротности резонатора, нагруженного эталонным сопротивлением Q', было примерно в два раза меньше значения добротности Q, Ом.
5.1.3.7 Динамическое сопротивление ^, Ом, определяют по формуле
где R3J — эталонное сопротивление, введенное в цепь затухания свободных колебаний при измерениях добротности О', Ом.
5.1.3.8 Динамическую индуктивность Lv Гн, определяют по формуле
где fr— резонансная частота, Гц.
5.1.3.9 Динамическую емкость С^ Ф, определяют по формуле
_ 0J59 1
2nfrQR^ fr QR^
(4)
5.1.4 Показатели точности измерений
5.1.4.1 Границы интервала 8Q (8/^), в котором с установленной вероятностью 0,95 находится погрешность измерения добротности 8Q и динамического сопротивления 8/^, определяют по формуле
80(8^) = ±1,96,
£си
(5)
где 8СИ — погрешность применяемого средства измерений (указывается в паспорте на средства измерения), %;
АО — интервал (допуск) на температуру при измерениях в нормальных условиях измерения;
а — коэффициент влияния температуры на параметр, вычисляемый по формуле
где ДЛ/ — изменение измеряемого параметра, соответствующее изменению температуры в допускаемом интервале ДО;
Л/ — номинальное значение параметра при температуре 0 = 25 °C или среднее значение между крайними значениями ДЛ/.
5.1.4.2 Границы интервала 8±1 (SC^, в котором с установленной вероятностью 0,95 находятся погрешности измерения динамической индуктивности 8L1 и емкости 80^ определяют по формуле
8^(8^) = ±1,96.
где 8f— погрешность измерения резонансной частоты, %.
5
ГОСТ Р 71734—2024
5.2 Генераторный метод (активного возбуждения)
5.2.1 Принцип и условия измерения
5.2.1.1 Измерение динамических параметров резонатора основано на измерении его активного сопротивления, когда четырехполюсник или мост с исследуемым резонатором включают в цепь основной обратной связи усилителя, и при максимальном коэффициенте передачи соблюдается баланс фаз и амплитуд, т. е. измерительная схема работает как автогенератор с частотой, близкой к частоте последовательного резонанса исследуемого резонатора.
5.2.1.2 Метод позволяет измерять частоту и параметры резонатора с нагрузочной емкостью, включенной в измерительную схему и подключенной путем нажатия кнопки или путем подключения в оснастке с одной или двумя емкостями, специально изготовленной и аттестованной.
5.2.1.3 Общие положения при измерениях в соответствии с разделом 4.
5.2.2 Аппаратура
5.2.2.1 Измерения следует проводить на установке, структурная схема которой приведена на рисунке 3.
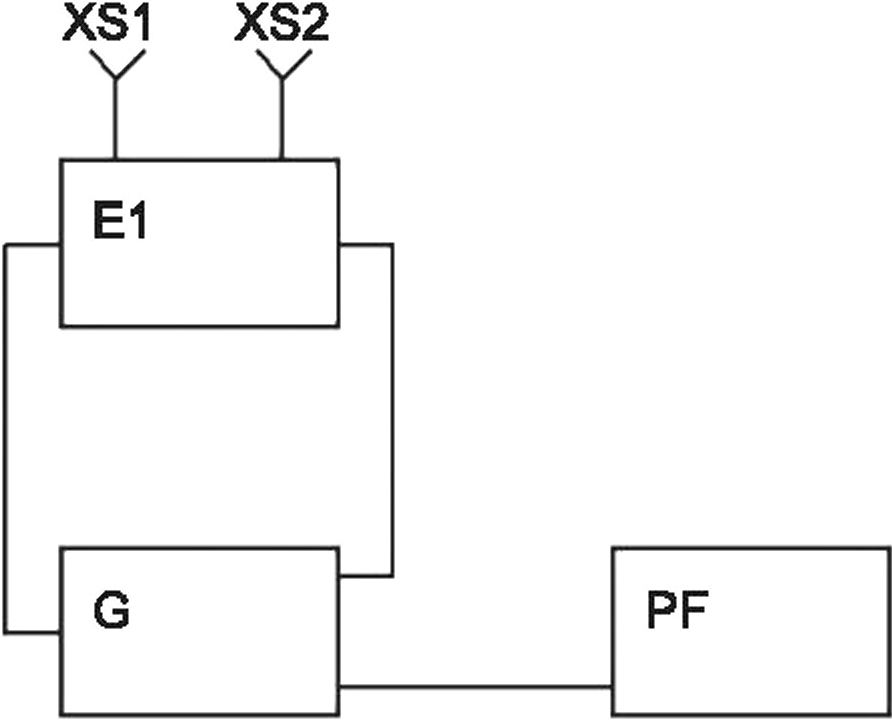
G — генератор с измерительным четырехполюсником в цепи положительной обратной связи Е1 с встроенным измерителем динамического сопротивления; PF — электронно-счетный частотомер; XS1, XS2 — гнезда для подключения резонатора
Рисунок 3
5.2.2.2 Генератор для возбуждения резонаторов должен обеспечивать:
- нестабильность частоты за время измерения в пределах ±2 ■ 10—6;
- уровень мощности возбуждения в пределах 1,0 мкВт до 0,5 мВт для каждого типа прибора;
- воспроизводимость частоты возбуждения с нагрузочной емкостью в пределах ±3 ■ 10-6;
- воспроизводимость динамического сопротивления резонаторов в пределах ±30 %.
5.2.2.3 Частотомер должен удовлетворять требованиям 4.2.4.
5.2.3 Подготовка и проведение измерений
5.2.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
5.2.3.2 Устанавливают резонатор в гнезда для подключения резонаторов. Выбирают и определяют согласованную нагрузку. Проводят настройку по частоте и калибровку по уровню возбуждения, затем осуществляют окончательную настройку при оптимальной чувствительности и снимают значение резонансной частоты fr по частотомеру.
5.2.3.3 После настройки резонатора перед измерением динамического сопротивления проводят калибровку шкалы измерения по сопротивлению и измеряют по шкале значение динамического сопротивления Rr
Примечание — При калибровке методом замещения резонатора эталонным резистором время между измерениями частоты не должно превышать 3 мин.
5.2.3.4 При применении прибора с возможностями подключения нагрузочной емкости подключают CL, измеряют частоту fCL и определяют динамическую емкость С1 пФ, динамическую индуктивность Ц, Гн, и добротность Q по формулам (8), (9), (10) соответственно
С1=2—4--(С0+СМ+4)’ (8)
6
ГОСТ Р 71734—2024
" 4л2
Q =------7--------\-----------------
4^1 (fcL _ fr)(со +см +cl)
(С0 + ^М + ^t)(fCL ~fr)
1
(9)
(Ю)
где Со — статическая емкость резонатора, пФ (дана в ТУ или предварительно измеряется);
См — конструктивная и монтажная емкость в пределах 2—5 пФ;
С[_ — нагрузочная емкость заданной величины, пФ;
fc — резонансная частота с нагрузочной емкостью CL, Гн;
fr— резонансная частота, близкая к частоте последовательного резонанса, Гц;
/?1 — динамическое сопротивление, Ом.
Примечание — Для конкретных типов средств измерений эти формулы могут быть приведены к удобному виду расчета и использованы в соответствии с их эксплуатационной документацией на них, например для ТГК-10 — технологический генератор кварцевый
c^i.g-io-Vq-y. (11)
5.2.4 Показатели точности измерения
5.2.4.1 Границы интервала 8^, в котором с установленной вероятностью 0,96 находится погрешность измерения динамического сопротивления, определяют по формуле
(13)
5.2.4.2 Границы интервала 8Q, в котором с установленной вероятностью 0,95 находится погрешность измерения добротности, определяют по формуле

(14)
5.2.4.3 Границы интервала в 8±1 (ЗС^, котором с установленной вероятностью 0,95 находится погрешность измерения динамических параметров — индуктивности и емкости, определяют по формуле
8^(5^) = ±1,96

(15)
где 3CL, 8С0, ЬСМ—допуск (погрешности измерения) соответствующих емкостей при измерениях.
Примечание — Если в расчете L1, С1 используют формулы, приведенные в эксплуатационной документации (примечание к 5.2.3.4), то при расчете погрешности вместо SCL, 8С0, ЪСМ используют погрешность измерения параметра, установленную в эксплуатационной документации на измеритель.
5.3 Фазовый метод в П-образном четырехполюснике (пассивного возбуждения)
5.3.1 Принцип и условия измерения
5.3.1.1 Измерение динамических параметров резонатора основано на зависимости его комплексного сопротивления от частоты.
5.3.1.2 В схеме измерения используют фазовый метод, в котором измеряют частоты и уровни напряжений при равенстве нулю фазы на входе и выходе четырехполюсника и принятому значению Дер при отстройке от нуля фазы, и по их зависимости от комплексного сопротивления резонатора рассчитывают динамические параметры резонатора. Метод имеет алгоритм проведения измерения в автоматическом режиме с обработкой на ЭВМ.
7
ГОСТ Р 71734—2024
5.3.1.3 Метод распространяется на резонаторы в диапазоне частот 1—200 МГц. На частотах свыше 100 МГц рекомендуется применять способ компенсации статической емкости Со. Метод может быть применен при измерении параметров в интервале температур.
5.3.1.4 При измерениях устанавливают расположение базовой плоскости подключения в соответствии с 4.1.4 на расстоянии 2 мм.
5.3.1.5 Калибровку нуля фазы осуществляют при помощи эталонного резистора (или комплекта делителей напряжения с закорачивающей перемычкой, конструктивно выполненных в П-образном четырехполюснике).
5.3.2 Аппаратура
5.3.2.1 Измерения следует проводить на установке, структурная схема которой приведена на рисунке 4.
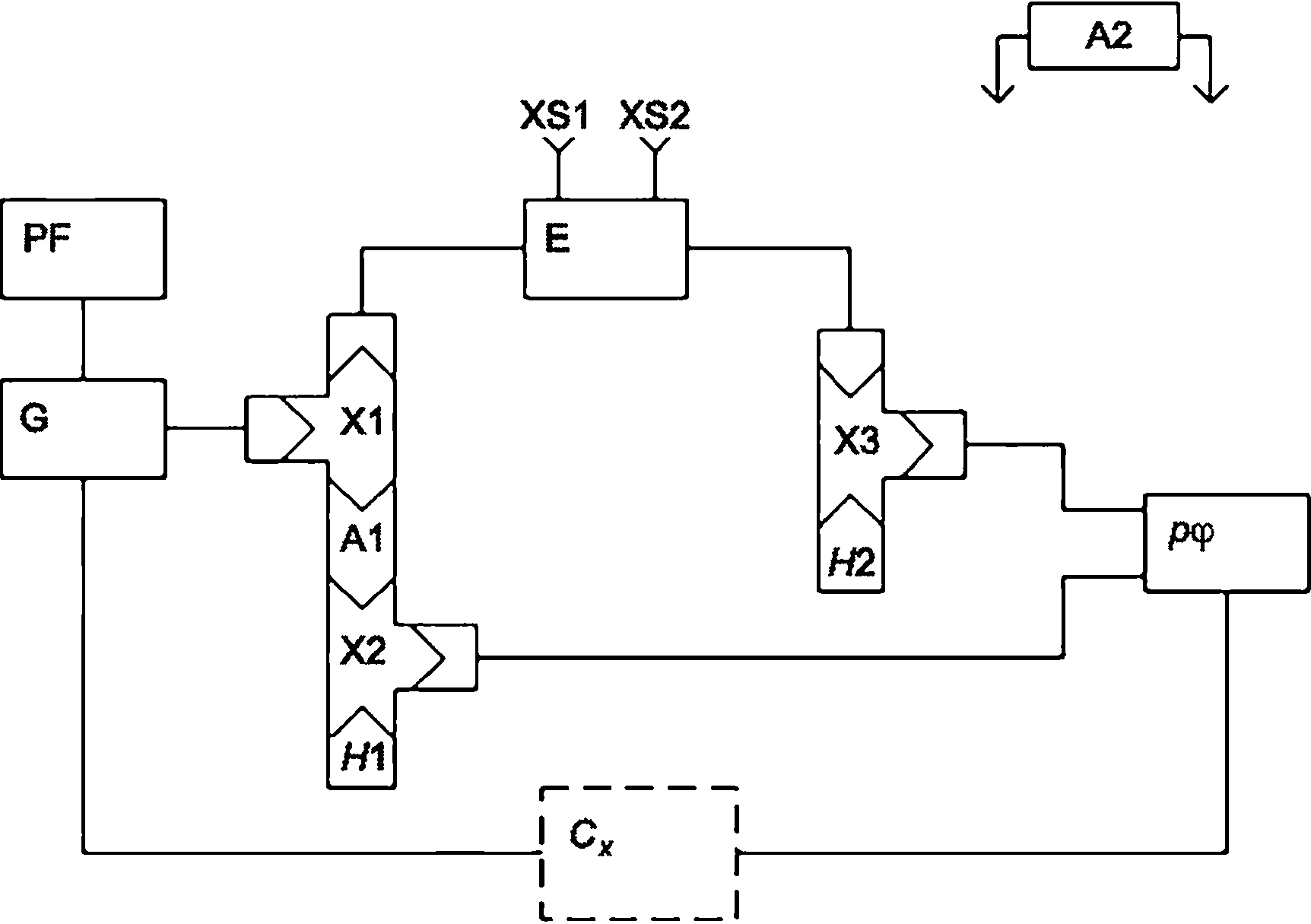
PF — частотомер; G — генератор (синтезатор); Е — П-образный четырехполюсник (делитель напряжения 5.172.205-01 ... 05); дер — измеритель разности фаз ФК2-29; А1 — резисторный фиксированный аттенюатор 30 дБ 2.260.029-05; А2 — короткозамы-кающая перемычка 4.846.013; Н1, /-/2 — комбинированная нагрузка с коэффициентом стоячей волны < 1,06, с R = 50 Ом 2.260.147 в комплекте pep; Х1, X2, ХЗ — тройник в комплекте pep; Сх — схема поиска и захвата, которая может применяться при измерениях в автоматическом режиме. В комплекте технологическая система 1022 ЕЭ.402.031
Рисунок 4
5.3.2.2 П-образный четырехполюсник (делитель напряжения) должен удовлетворять требованиям 4.2.3. Для обеспечения измерения в широком диапазоне сопротивлений четырехполюсник может быть выполнен конструктивно несколькими приборами (комплект системы технологической 1022).
5.3.2.3 Генератор (синтезатор частоты) должен удовлетворять требованиям 4.2.2. Длительность переходных процессов при установке нового значения выходного сигнала в режиме управления через канал общего пользования (КОП) не более 10 мкс. Фазовый шум на резонансной частоте с высокодобротным кварцевым резонатором в П-образном четырехполюснике — в пределах ±2°.
5.3.2.4 Измеритель разности фаз должен удовлетворять требованиям 4.2.5.
5.3.2.5 Схема поиска и захвата может быть выполнена в виде самостоятельных блоков, приборов управления, согласования, регистрации и обеспечивать:
- управление частотой генераторов, измерительными и регистрирующими устройствами;
- прием и выдачу с преобразованием данных по программе в двоичном коде по ГОСТ 27463 в виде комбинаций импульсов положительной полярности с управлением от ЭВМ и выходом на КОП;
- согласование параметров входных и выходных информационных сигналов;
-длительность переходных процессов не более 100 мс;
- регистрацию результатов измерения.
8
ГОСТ Р 71734—2024
5.3.3 Подготовка и проведение измерений
5.3.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
5.3.3.2 При измерениях в интервале рабочих температур в установку входит термокамера. Устанавливают в термокамеру резонаторы и подключают П-образный четырехполюсник.
5.3.3.3 Подключают короткозамыкающую перемычку к гнездам П-образного четырехполюсника, устанавливают номинальное значение частоты резонаторов, подлежащих измерению fH (fH = ±0,1 %). Проводят калибровку установки путем установления значения фазы с помощью компенсатора измерителя разности фаз. Устанавливают напряжение в измерительном канале 3 мВ.
5.3.3.4 Устанавливают измеряемый резонатор вместо перемычки. Уменьшают частоту на величину не менее чем на 2 • 10-4 от fH. Затем, увеличивая частоту и используя интерполяцию, добиваются нулевого значения показания фазометра. Записывают значение резонансной частоты fr и напряжение в измерительном канале ии и опорном канале Uo.
Устанавливают требуемую мощность рассеяния Р, мВт, на измеряемом резонаторе, для чего предварительно рассчитывают динамическое сопротивление R1, Ом, и определяют требуемый уровень напряжения в измерительном канале Uu по формулам (16), (17) соответственно:
( Un \
r’=2R77-1 <16>
ии=^^- (17)
где R — нагрузочное сопротивление делителя напряжения в четырехполюснике со сторон контактов резонатора, при включенных нагрузках (на входе и выходе), 50 Ом;
Р — мощность рассеяния на резонаторе, заданная в ТУ или другом нормативно-техническом документе на резонатор;
Ry — динамическое сопротивление, рассчитываемое по формуле (16).
5.3.3.5 Устанавливают рассчитанное напряжение в измерительном канале Uu- Фиксируют значение напряжений, при которых разность фаз между опорным каналом напряжения Uo и измерительным каналом напряжения ии равна (0 ± 2)°.
5.3.3.6 Уменьшают частоту выходного сигнала, одновременно следя за изменением фазы, и при достижении разности фаз (0 ± 2)°, в зависимости от крутизны фазочастотной характеристики, фиксируют частоту ftp, соответствующую разности фаз, например ср = 10°.
5.3.3.7 При проведении измерений в автоматическом режиме настраивают программу в соответствии с исходными данными измеряемых типов резонаторов.
Алгоритм измерения составляют в соответствии с 5.3.3.1—5.3.3.7 с учетом ожидаемых величин параметров и эксплуатационной документацией на приборы, входящие в установку.
5.3.4 Обработка результатов измерений
5.3.4.1 Резонансную частоту ^считывают в момент ср = 0. Динамические параметры: динамическое сопротивление, индуктивность, емкость, а также добротность и мощность возбуждения рассчитывают по нижеприведенным формулам.
5.3.4.1.1 Динамическое сопротивление резонатора Ry, Ом, рассчитывают по формуле
Ri = 2K -£--1. (18)
{Uy /
5.3.4.1.2 Динамическую индуктивность резонатора Ly, Гн, рассчитывают по формуле
(2R + R1)tglp(10)
й =-------,----V. (19)
^Иф))
где Ry — динамическое сопротивление, рассчитанное по формуле (18);
<Р(10) — фазовый угол при отстройке на принятый угол;
fr— резонансная частота при ср = 0, Гц;
/^ — частота, измеренная при отстройке на принятый угол, Гц.
9
ГОСТ Р 71734—2024
5.3.4.1.3 Динамическую емкость резонатора С^ пФ, рассчитывают по формуле
А =
1012
(^■frf-L,
(20)
где L1 —динамическая индуктивность, рассчитанная по формуле (19).
5.3.4.1.4 Добротность резонатора Q рассчитывают по формуле
2п ■ fr ■ ф «1
(21)
5.3.5 Показатели точности измерения
5.3.5.1 Показания точности измерения динамических параметров должны соответствовать установленным в стандартах или ТУ на изделия конкретных типов.
5.3.5.2 Границы интервала З/ф в котором с установленной вероятностью 0,95 находится относительная погрешность измерения динамического сопротивления, определяют по формуле
8^
=±1,96М+ 10(л
ЧШ [(Uo-Uu)2] М
(22)
где ЗЯ — погрешность (допуск) нагрузочного сопротивления;
с^ — оценка сРеДнекваДРатического отклонения случайной составляющей погрешности измерения напряжения. При отсутствии данных определяют практическим путем методом многократных измерений одной и той же величины и рассчитывают по формуле
^]=
(23)
где Xj — результат /-го (/= 1,2, 3, ..., 20) измерения;
х — среднее арифметическое значение результатов измерения;
л — количество измерений (не менее 20).
5.3.5.3 Границы интервала 8L1, в котором с установленной вероятностью 0,95 находится относительная погрешность измерения динамической индуктивности, определяют по формуле
8Й=±1.96 M:(^)>f
« (ZR + Rj2-^) ^'
(24)
где З/ф — погрешность измерения динамического сопротивления;
8(р — погрешность измерения фазового угла;
ЗГ— погрешность измерения резонансной частоты.
5.3.5.4 Границы интервала Зф, в котором с установленной вероятностью 0,95 находится относительная погрешность измерения динамической емкости, определяют по формуле
(25)
где 8L1 — погрешность измерения динамической индукции по 5.3.5.3.
5.3.5.5 Границы интервала 8Q, в котором с установленной вероятностью 0,95 находится относительная погрешность измерения добротности, определяют по формуле
8Q = ±1,96,
5^
496
2
Зф
496
2
(26)
10
ГОСТ Р 71734—2024
5.4 Метод коэффициента передачи с полупассивным возбуждением
5.4.1 Принцип и условия измерения
5.4.1.1 Принцип измерения основан на зависимости коэффициента передачи от частоты. При этом динамические параметры резонатора определяют косвенным путем из измеренных параметров коэффициента передачи четырехполюсника, мостовой схемы (напряжения, тока и фазы) и резонансных частот резонатора.
5.4.1.2 Сигнал с выхода генератора подают на измерительную схему четырехполюсника или моста, в цепь которого включают испытуемый резонатор. Коэффициент передачи такой измерительной схемы зависит от частоты, поэтому сигнал с его выхода, несущий информацию о фазовых и амплитудных искажениях тока и напряжения, возникающих за счет включения в него резонатора и нагрузочных элементов, преобразуется и сравнивается с входным сигналом. Индикацию резонансной частоты осуществляют по принципу подстройки частоты генератора на нулевое значение фазовой характеристики испытуемого резонатора или на максимум АЧХ.
5.4.1.3 Общие положения и условия измерения — в соответствии с разделом 4.
5.4.2 Аппаратура
5.4.2.1 Измерения следует проводить на установке, структурная схема которой приведена на рисунке 5.
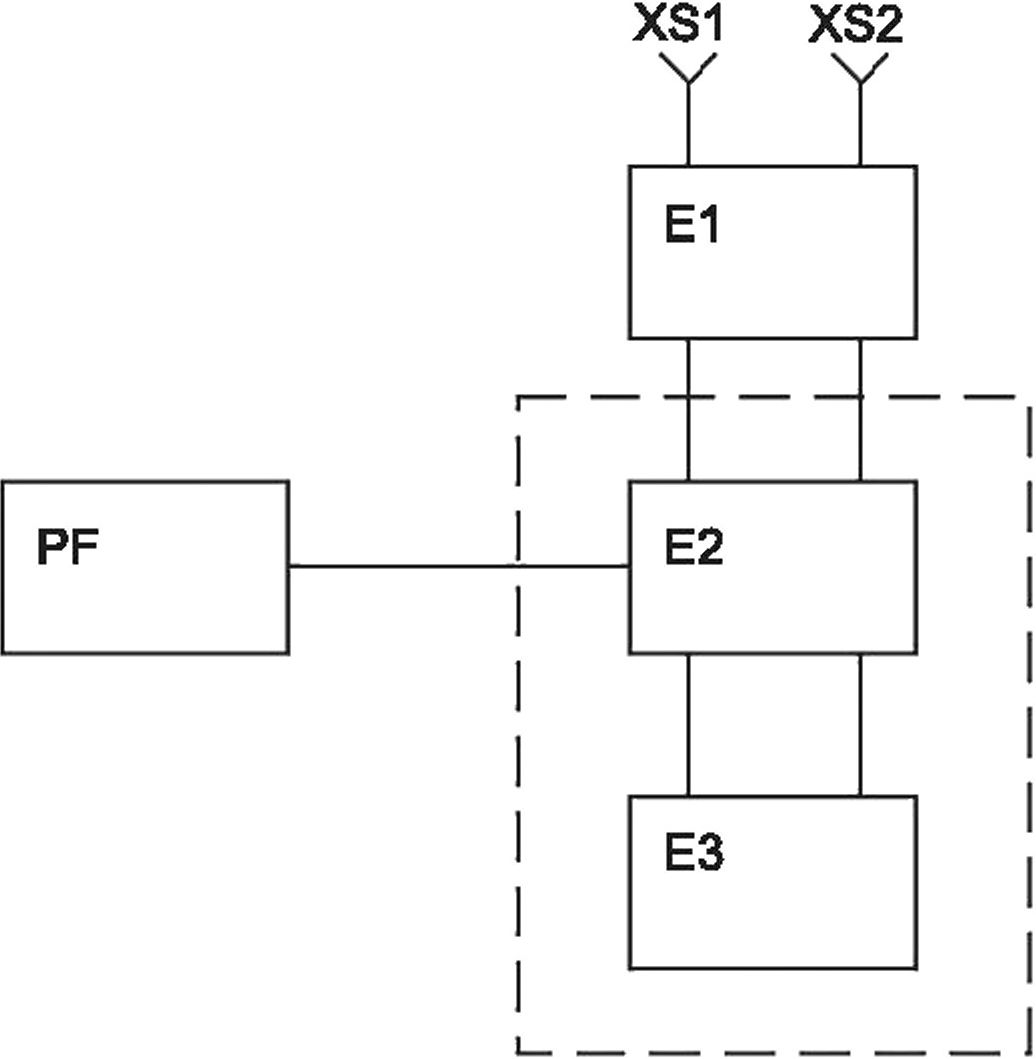
PF — электронно-счетный частотомер; Е1 — выносное устройство — блок параметров — четырехполюсник; Е2 — измерительный блок; ЕЗ — блок управления (вычислительный); XS1, XS2 — гнезда для подключения резонатора
Рисунок 5
5.4.2.2 Измеритель параметров резонаторов должен соответствовать требованиям к генератору в соответствии с 4.2.2. По диапазону частот он может обеспечиваться несколькими приборами, по конструкции может быть выполнен в одном или нескольких блоках и иметь в составе фазосличающее устройство, индикацию по фазе и измеритель сопротивления с автоматическим процессом измерения и вычисления.
5.4.2.3 Выносное устройство (блок параметров) должно (должен) соответствовать требованиям 4.2.3 и по диапазону частот может обеспечиваться несколькими приборами. В комплекте должно (должен) иметь калибровочные сопротивления.
5.4.2.4 Частотомер электронно-счетный должен соответствовать требованиям 4.2.4.
5.4.2.5 Перечень аппаратуры приведен в приложении А.
5.4.3 Подготовка и проведение измерений
5.4.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
5.4.3.2 Устанавливают диапазоны по частоте и сопротивлению в соответствии с требованиями на резонаторы, подлежащие измерению.
11
ГОСТ Р 71734—2024
5.4.3.3 При работе на аппаратуре с вычислительным блоком или оснащенной ЭВМ настраивают программу на измеренный тип резонатора по его ожидаемым техническим характеристикам.
5.4.3.4 Устанавливают испытуемый резонатор в гнезда для подключения резонаторов.
5.4.3.5 Устанавливают частоту на 1 % 3 % ниже номинальной частоты испытуемых резонаторов, проводят балансировку измерительной схемы выносного устройства, при необходимости компенсацию статической емкости Со и калибровку в соответствии с эксплуатационной документацией на применяемый прибор.
5.4.3.6 Увеличивая частоту генератора, настраивают на резонансную частоту fr и считывают ее значение по электронно-счетному частотомеру. По шкале измерителя сопротивлений считывают значение динамического сопротивления резонатора R^.
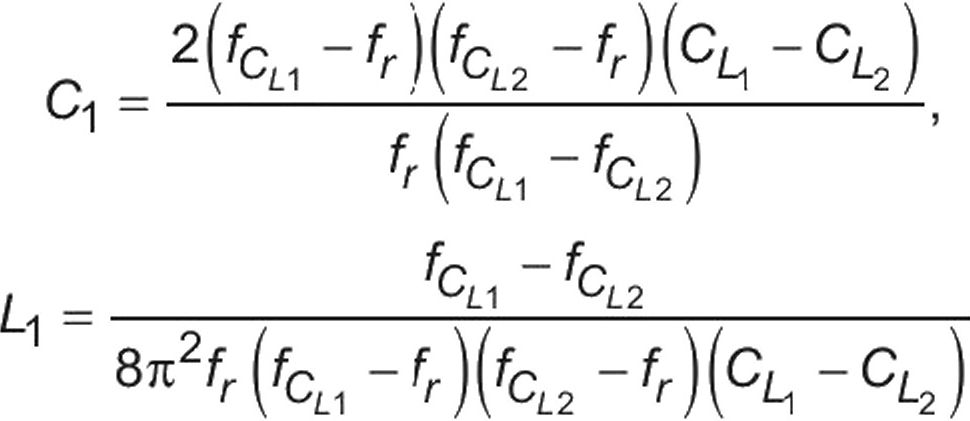
5.4.3.7 При измерении динамических индуктивности и емкости в установке реализуется метод двух или трех частот. Для этого устанавливают в соответствующее положение переключатель рода работ или в соответствии с инструкцией по эксплуатации вводят последовательно или параллельно резонатору дополнительно нагрузочные элементы: калибровочные емкости CL (или Сц и С^2), фиксируют значение частот fc (или fCL и fCL ).
5.4.4 Обработка результатов измерений
5.4.4.1 Рассчитывают значение динамической индуктивности Lv Гн, и динамической емкости Ср Ф, методом двух частот по формулам (27), (28) соответственно:
^(Со+сц^ - ф'
C,=2(Co+CL)-^--,
'г
где Со — статическая емкость резонатора, пФ;
CL — нагрузочная емкость при измерениях, пФ;
fr— резонансная частота, измеренная без нагрузочной емкости, Гц;
fc — частота, измеренная с нагрузочной емкостью CL, Гц, и методом трех частот по формулам (29), (30) соответственно:
(27)
(28)
(29)
(30)
где fc fCL2— частоты, измеренные с нагрузочной емкостью Сц и CL2, Гц.
Примечание —Для конкретных типов измерителя параметров резонаторов отсчет измеряемых параметров проводят в цифровом виде на индикаторе или по шкале стрелочного индикатора, для других типов измерителей эти формулы могут быть приведены к удобному виду расчета и даны в эксплуатационной документации на них, например для ИПР-45 в диапазоне частот 10—55 МГц по формулам (31), (32) соответственно:
=125^1—^Ю“12,
, _ 2108
в диапазоне частот 55—150 МГц по формулам (33), (34) соответственно:
~fr ю а =31,25-^—-ио-12,
, _ 8-108
(31)
(32)
(33)
(34)
12
ГОСТ Р 71734—2024
5.4.4.2 Значение эквивалентной добротности Q определяют по формуле @ _ 2nfrL\
(35)
5.4.5 Показатели точности измерения
5.4.5.1 Показатели точности измерения динамических параметров резонатора Rv Lv С1 должны соответствовать установленным в стандартах или ТУ на изделия конкретных типов.
5.4.5.2 Границы интервала 8Q(8R1,8L1,8C1), в котором с установленной вероятностью 0,95 находятся относительные погрешности измерения динамических параметров и добротности, определяют по формуле
80(5^, 8Ц, 8С1) = ±1,96.
5^ f и0
'3
А0 a—f=
V3
2
I ЮО2.
(36)
13
ГОСТ Р 71734—2024
Приложение А (справочное)
Перечень аппаратуры, рекомендуемой для измерения динамических параметров пьезоэлектрических резонаторов
Таблица А.1
Наименование аппаратуры | Тип прибора и реализация метода | Основные технические характеристики |
1 Измерители динамических параметров кварцевых резонаторов | ИПРД-1 Метод 1 | Диапазон частот — 1—10 кГц. Диапазон измеряемых добротностей —10 тыс. и выше. Погрешность измерения добротности 8Q = ±3 %. Погрешность измерения динамического сопротивления 8R1 = ±5 %, динамической емкости 5С1 = ±6 % |
ИПРД-2 Метод 1 | Диапазон частот — 10 кГц — 1 МГц. Диапазон измеряемых добротностей 10 тыс. и выше. Погрешность измерения добротности 5Q = ±3 %. Погрешность измерения динамического сопротивления 8R1 = ±5 %, динамической емкости и индуктивности 8С1 (З^) = ±6 % | |
ИПРД-3 Метод 1 | Диапазон частот — 1—10 кГц. Диапазон измеряемых добротностей 20 тыс. и выше в диапазоне частот 1—5 МГц и 50 тыс. и выше в диапазоне частот 5—10 МГц. Погрешность измерения добротности 8Q = ±5 % при R1 > 50 Ом в диапазоне 1—5 МГц и при любом R1 в остальном диапазоне. Погрешность измерения динамического сопротивления 8R1 = ±7 %, динамической емкости и индуктивности 5С1 (SL^ = ±10 % | |
ИПР-35 Метод 4 | Диапазон частот — 1—150 МГц. ( 1 -6 Воспроизводимость измерения частоты 8f = ±l у^ + 0,5-10 I. Погрешность измерения добротности 5Q = ±5 % и динамического сопротивления AR1 = ±(0,06/?1 + 1) Ом до 100 МГц и свыше 100 МГц 5Q = ±10 %, Д^ = ±(0,1^ + 2) Ом. Мощность рассеяния на резонаторе, регулируемая в пределах от 0,1 до 4 мВт | |
2 Измеритель параметров резонаторов | ИПР-45 Метод 4 | Диапазон частот —10—150 МГц. f 1 -6^ Воспроизводимость изменения частоты 8f = ±l у^ + 0,5 -10 I. Воспроизводимость результатов измерения динамических параметров в диапазоне частот 10—100 МГц, AR1 = ±(0,06R1 + 1) Ом, ЗС1 (8L1) = ±5 %, в остальном диапазоне частот д^ = ±(0,2^ + 2) Ом и 8^ (5^) = ±10 %. Мощность рассеяния на резонаторе — не более 0,4 мВт |
3 Полуавтоматическая установка для настройки и выходного контроля кварцевых резонаторов | Установка Метод 4 | Диапазон частот — 0,1—10 МГц. Воспроизводимость результатов измерения частоты 8f = ±^ + ±2°l + 2.1o4 [ 30Q ^ ) Воспроизводимость измерения динамических параметров AR^ = ±(0,1 Rq + 1) Ом SL^ ЗСр 8Q в пределах ±10 %. Мощность, рассеиваемая на резонаторе — не более 0,2 мВт |
14
ГОСТ Р 71734—2024
Продолжение таблицы А. 1
Наименование аппаратуры | Тип прибора и реализация метода | Основные технические характеристики |
4 Полуавтоматическая установка отбракования кварцевых резонаторов по параметрам | Установка Метод 4 | Диапазон частот—10—105 МГц. 2 5'10 ^ Г 1 А Погрешность измерения частоты 87 = ±—-^----+ ^^^ + 2-10“7| Диапазон измерения динамических сопротивлений — 1—1000 Ом с погрешностью Д7?1 = ±(0,1^ + 0,5) Ом. Диапазон измерений добротности — (10—500) • 103 с погрешностью 8Q = ±10 %. Диапазон измерений динамической индуктивности — 0,5—100 МГц с погрешностью ±5 % |
5 Базовый измерительный комплекс кварцевых резонаторов | Установка Метод 4 | Диапазон частот— 1—105 МГц. Погрешность измерения частоты при температуре (25 ± 0,1) °C 57 = ± 5-10’7+^-1. 1 ) Диапазон измерения динамического сопротивления — 1—500 Ом с погрешностью Д/^ = ±(0,05^ + 1) Ом. Погрешность измерения динамических параметров 8Q, 8L1 = ±10 %. Мощность рассеивания на резонаторе в пределах от 25 до 500 мкВт |
6 Технологический кварцевый генератор | ТГК-10 Метод 2 | Диапазон частот — 31—33 кГц. Воспроизводимость измерения частоты 87 = ±1 ^^ + 0,5-10 I с -6 нагрузочной емкостью 87 = ±1 ^^ + 1,5-10 I. Воспроизводимость добротности 8Q = ±15 %. Воспроизводимость динамических параметров Д^ = ±(0,12^ + 0,3) Ом; 8С1 = ±5 % |
7 Кварцевый генератор для измерения частоты и динамического сопротивления высокоомных часовых микрокамертон-ных резонаторов | ГК-0.031-002 Метод 2 | Диапазон частот — 30—33 кГц для резонаторов с динамическим сопротивлением от 10 до1400 кОм. Воспроизводимость измерения частоты: 87 = ±1,5 • 10-6 для Ry < 80 кОм; 87 = ±3 • 10-6 для R1 < 250 кОм для номинальной частоты 32 768 Гц 87= ±(1 ■ 10-8 + 1,5 • 10-6). Воспроизводимость измерения: Д^ = ±(0,06/?1 + 1) кОм для ^ < 100 кОм; Д^ = ±10 % для R1 < 350 кОм; AR1 = ±25 % для Я| < 1400 кОм. Мощность рассеивания на резонаторе — не более 1 мкВт |
8 Измерительная установка полуавтоматическая для приемо-сдаточных испытаний микрока-мертонных резонаторов | УВК-ПЭА Метод 2 | Диапазон частот — 32 750—32 775 Гц. Динамическое сопротивление — не более 150 кОм. Погрешность сортировки по точности настройки — ±2 • 10-6. Погрешность по динамическому сопротивлению — ±6 %. Погрешность установки температуры — ±0,5 °C. Погрешность измерения максимального относительного изменения частоты — в интервале температур ±0,7 • 10~6 |
9 Кварцевый технологический генератор | ТГК-1 Метод 3 | Диапазон частот — 0,5—70 кГц. Воспроизводимость измерения частоты: 87= ±1 • 10“6 при Q>5 • 104. 87 = при Q < 5 ■ 104. 20Q н Воспроизводимость измерения динамического сопротивления 8R1 = ±15 %. Мощность рассеивания на резонаторе: не более 10 мкВт — (0,5—5,0) кГц; 10 мкВт — (5,0—35) кГц; 100 мкВт — (35—70) кГц |
15
ГОСТ Р 71734—2024
Окончание таблицы А. 1
Наименование аппа- Тип прибора и ратуры реализация метода | Основные технические характеристики |
9 Кварцевый техно- ТГК-2 логический генера- Метод 2 тор | Диапазон частот — 50—10ОО кГц. Воспроизводимость измерения частоты §f= ±2 ■ 10~6 при Q < 5 • 104. Погрешность измерения динамического сопротивления 5R1 = ±20 % |
ТГК-3 Метод 2 | Диапазон частот — 1—30 МГц. Воспроизводимость измерения частоты 8f= ±2 ■ 10~6 при Q > 5 • 104. Погрешность измерения динамического сопротивления AR^ = ±(0,02R^ + 1) Ом. Мощность рассеивания на резонаторе — не более 330 мкВт |
10 Генератор квар- ГК-300-001 цевый Метод 4 | Диапазон частот— 100—300 МГц. Воспроизводимость значения измеряемой частоты 3f = ±3 • 10-6. Воспроизводимость измерения динамического сопротивления AR^ = ±(0,1R^ + 4) Ом. Мощность рассеивания на резонаторе — не более 0,4 мВт |
11 Прибор для из- 14 КПП-200-004 мерения частоты и Метод 4 динамических параметров кварцевых резонаторов | Диапазон частот — 10—105 МГц. Воспроизводимость результатов измерения частоты 87 = ± f—— + 210 9 + 2 • 10~7 Y [100Q ^ ) Диапазон измеряемых динамических сопротивлений — 1—1000 Ом. Воспроизводимость результатов измерения R1 AR = ±(0,08R^ + 0,2) Ом. Мощность рассеивания на резонаторе — не более 0,1 мВт |
14 КПП-200-003 Метод 4 | Диапазон частот — 1—10 кГц. Воспроизводимость результатов измерения частоты 5Г = ±f—-^-L 2 • 10~71 [ЮОО ) Диапазон измеряемых динамических сопротивлений — 1—1000 Ом. Воспроизводимость результатов измерений R1 Д^ = ±(0,08R1 + 0,2) Ом. Мощность, рассеиваемая на резонаторе — не более 0,1 мВт |
12 Система техно- 1022 логическая для из- Метод 3 мерения частоты и параметров кварцевых резонаторов | Диапазон частот — 1—105 МГц. Относительная погрешность установки частоты ±1,5 ■ 10-7. Погрешность измерения разности фаз при равных сигналах (100 ± 50) мВ — не более 10 %. Погрешность измерения динамических параметров резонаторов Rv Ср L1 в пределах — 5 %—10 % |
13 Прибор для из- ПВКРКП-1/40-021 мерения частоты и Метод 4 динамических параметров | Диапазон частот — 1—40 МГц. ( 1 Г10^ | Основная погрешность 87 = ± — + —-— + 2Ю-71. Диапазон измеряемых сопротивлений — 1—1000 Ом. Погрешность измерения сопротивления и динамических параметров: Д^ = ±5 %, ДГр ДО = ±10 %. Мощность рассеивания на резонаторе — не более 0,04 мВт |
ПВК РКП-1/40-022 Метод 4 | Диапазон частот — 40—105 МГц. Основная погрешность: „ ( 1 1Ю“9 n 5Г = ±----+------+ 2-10 7 ; [50Q /^ J ДЯ, = ±5 %, ДГр ДО = ±10 % |
Примечание — Допускается замена на аналогичные средства измерения и вспомогательные устройства с техническими характеристиками, соответствующими требованиям точности.
16
ГОСТ Р 71734—2024
Приложение Б (справочное)
Примеры расчета
Б.1 Метод 1
Измерения проводились на ИПРД-3. Кварцевые резонаторы №№ 079, 133 на частоте Г = 50 Гц при температуре 23 °C и 35 °C.
Б.1.1 Измеряемые значения добротностей и частоты приведены в таблице Б.1, а также расчетные параметры, необходимые для вычислений погрешностей измерения.
Таблица Б.1
Номер кварцевого резонатора | Температура, при которой определяют температурный коэффициент | Частота | Добротность Q, Q', Кэт | Я = (Ом) 1 Q/Q'-1 ' ' | ^,0^5905, (рн) | - 0,159Ю12 , _ с’ = w (пф) |
079 | 35 °C | 5,000,078 | Q = 448 • 103 Q' = 251 • 103 R3T = 5 Ом | 6,41 | 0,0913 | 0,011 |
23 °C | 5,000,087 | Q = 330 • 103 Q' = 228 • 103 R3T = 5 Ом | 11,1 | 0,119 | 0,0085 | |
ДА/ 1 а =--- л/ де | а = 1 • 10-7 | а = 0,029 | а = 0,064 | а = 0,025 | а = 0,024 | |
133 | 35 °C | 5,000,091 | 0 = 421 • 103 Q'= 188 • 103 R3T = 5 Ом | 4,06 | 0,049 | 0,0186 |
23 °C | 5,000,093 | Q = 330 • 103 Q'= 168 ■ 103 /?эт = 5 Ом | 5,20 | 0,055 | 0,0184 | |
ДА/ 1 а =--- а/ де | — | 0,020 | 0,020 | 0,009 | 0,001 |
Б.1.2 По данным паспорта на ИПРД-3 — 6Q = 5 %, 5^ = 7 %, 8Ц, 8С1 = 10 %.
Б. 1.3 Для расчета погрешностей определяют коэффициенты влияния температуры aR, aQ, aL, ас по формуле (6) для резонатора № 133:
AW 1 а =---;
л/ де
5,2-4,06 1 1,14 1 1,14 1
R 5,20 + 4,06 35-23 4,63 12 55,56 °C
2
421-Ю3-ЗЗОЮ3 1 91-Ю3 1 91 1
aQ — о— г■——“~ —-----г “ — “~~ — 0,020--;
421-Ю3+ЗЗО-1О3 35-23 375-Ю3 12 4500 °C
2
_ 0,055-0,049 1 _ 0,0061 1 _ 0,0061 _ Q Q()g 1 .
aL ~ 0,055 + 0,049 ’ 35-23 ~ 0,052 12 ~ 0,623 ~ ’ У°С’
2
0,0186-0,0184 1 0,00024 1 0,00024 Q 0Q1 1
“ 0,0186 + 0,0184 35-23 ~ 0,01848 12 ~ 0,22176 ~ ’ °C’
2
17
ГОСТ Р 71734—2024
Б.1.4 Погрешность измерения динамического сопротивления 8R1 и добротности 8Q определяют по формуле (5)
8Я =±1,96J Ю02=±1,96. — + 0,020— -ЮО2 = ±1,9бЛю37 + 33 = 13,7 %;
Vva/з; I V3j V^1’73/ v 1,73 J
8Q = ±1,96.--- + 0,020--- •1002 =±1,96JW5 + 334 = 12,6%.
1,73 J ( 1,73 J v
Б.1.5 Погрешность измерения динамической индуктивности 8L1 и емкости 8С1 резонатора определяют по формуле (7)
8^ =±1,96,
80^1,96,
10
2
^V3
1-10"8
1,73
2
■ЮО2
/ 5
+ о,009—
I 1,73
\2
■ ■ ЮО2 = ±1,96^33,4 + 0 + 6,7 = 12,4 %;
10
1,73
2
1Ю“8
1,73
2
I •1002+|0,001
х2
• • ЮО2 = ±1,9бТзЗД + 0 + Д083 = 11,32 %.
Б.2 Метод 2 (генераторный метод активного возбуждения)
При измерениях на приборах типа ТГК - 8R1 = 20 %.
При измерении динамических параметров частот методом 2 применяют нагрузочную емкость с погрешностью bCL = ±5 %. Со измерена с погрешностью ± 5 %; монтажную емкость принимают равной (3 ± 0,3) пФ.
Б.2.1 Погрешность измерения динамического сопротивления определяют по формуле (13) при допуске по температуре ±5 °C и коэффициенте влияния температуры а = 0,020:
U 20 Г
ЗЯ = ±1,96. +
yl 7з J
5 0,020
2
•ЮО2 = ±1,967^6 + 83 = 25,2 %.
Б.2.2 Погрешность измерения добротности определяют по формуле (14). Для расчета принимают 8R1 = 25 %; 87= 1 • Ю-7; Л = 5000093; fr = 5000150:
8Q = ±1,96
7 25 | ,2 + | (5-Ю6)2 | + (5-Ю6)2 | 110 о 7 5 А2 •^----^-Ю02+ 0,02 — -ЮО2 |
Ь,73 | (5000150 | -5000093)2 | (1,73)2 1 V3J |
I dл ^о-1^
= ±1,96ч 208,8 + ----+ 33 = 30,5 %.
V 3249-1,732
Б.З Фазовый метод в П-образном четырехполюснике (пассивного возбуждения)
При измерениях на установке на рисунке 4 для расчета погрешностей: Ry = 5,2 Ом; Тф = 1 В; Д9 = ± 2 °C; R = 6,25 Ом; ии = 0,4 В; 8К = 0,5 %; о[5 ] = 0,01; f2 = 5000091; 7(10) = 5000000; Sep = 3 %; а = 0,009.
Б.3.1 Погрешность измерения динамического сопротивления определяют по формуле (22)
8/?1 =±1,96
7 0,5 ' 1173, | 2 + | 12+0,42 (1-0.4)2 | Ок г1002 |
= ±1,96,
10,083 + | ~1,16~ .0,36. | -0,012-1002 |
= ±1,9б7Д083 + 3^22Й = 3,5 %.
Б.3.2 Погрешность измерения динамической индуктивности 8L определяют по формуле (24)
8L, =±1,96,
(2-6,25-0,5)2+(5,2-3,5)2 (2-6,25 + 5,2)2-1,732
(5-Ю6)2 +(б • Ю6)2
-юо2+[о,оо9—] юо2 =
1,73 J I 1,73j
= ±1,96J39,06 + 331,24 + 50-10 2 0,ЗЗ Ю + 6 7 = ±1 96^0,39 + 3,0 + 0,0019 + 6,7 = 6,22 % = 6,2 %.
у 939,87 8281 v
Б.3.3 Погрешность измерения динамической емкости 8С1 определяют по формуле (25)
I 7о 1 ю—$ 0 об? А2 г----------------------
8С<=±1,96Л 2 ± - + — -100 = ±1,9672-0,0033-Ю-12+0,001-100 = 6,2 %.
1 ¥ I 1,73 I I 1,96 )
18
ГОСТ Р 71734—2024
Б.3.4 Погрешность измерения добротности 3Q определяют по формуле (26)
3Q = ±1,96j — + — + ’ =±1,96^3,19 + 10 + 0 =7,12 %.
^1,96j 11,96 J [ 1,73 J N
Б.4 Метод коэффициентов передачи с полупассивным возбуждением
Измерения проводят на установке ИПРД-45 с метрологическими характеристиками: А^ = ±(0,06^ + 1) Ом; ЗЯ, = 19 %; ЗСр ЗЦ = ±5 %.
Измеряют резонатор №2^=10МГц:
^ = 7,62 Ом при 0 = 25,7 °C; ^ = 7,41 Ом при 0 = 26,6 °C; ±1 = 0,0069 Гн, С1 = 0,0367 пФ, Q = 56881.
Б.4.1 Погрешность измерения динамического сопротивления 3R1 определяют по формуле (36)
\2 Z
ЗЯ = ±1,96. --- + 0,026--- ЮО2 = ±1,9б7120ф + 56Л = 26 %,
1 ^t73? I 1.73J v
где а — коэффициент влияния температуры на параметр, определяемый по формуле (6)
Б.4.2 Погрешность измерения динамической индуктивности 3L1 определяют по формуле (36) при 0 = 25,7 °C; ^ = 0,00714 Гн и 0 = 26,6 °C; Ц = 0,00690 Гн
3^ =±1,96j-^J +l 0,034-^ I ЮО2 =±1,9678,3 + 56=15,7%, где а — коэффициент влияния температуры на параметр, определяемый по формуле (6) 0,00714-0,00690 1 0,000242 1
а =---=---= 0,034.
0,00690 1,03 0,00690 1,03
19
ГОСТ Р 71734—2024
Библиография
[1] Правила техники безопасности и производственной санитарии в электронной промышленности (утверждены Министерством электронной промышленности СССР 26 апреля 1972 г. Постановлением Президиума ЦК профсоюза рабочих радио- и электронной промышленности от 19 апреля 1972 г., протокол № 3)
УДК 621.372.54:006.354
ОКС 31.140
Ключевые слова: резонатор пьезоэлектрический, динамические параметры, методы измерений
Технический редактор В.Н. Прусакова Корректор И.А. Королева Компьютерная верстка Е.О. Асташина
Сдано в набор 29.10.2024. Подписано в печать 21.11.2024. Формат 60x847s. Гарнитура Ариал.
Усл. печ. л. 2,79. Уч.-изд. л. 2,24.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
