ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
71419-
2024
РЕЗОНАТОРЫ ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
Методы измерения динамического сопротивления в интервале температур среды при эксплуатации
Издание официальное
Москва Российский институт стандартизации 2024
ГОСТ Р 71419—2024
Предисловие
1 РАЗРАБОТАН Акционерным обществом «Российский научно-исследовательский институт «Электронстандарт» (АО «РНИИ «Электронстандарт»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 303 «Электронная компонентная база, материалы и оборудование»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 6 июня 2024 г. № 718-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2024
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 71419—2024
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЕЗОНАТОРЫ ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
Методы измерения динамического сопротивления в интервале температур среды при эксплуатации
Piezoelectric resonators. Methods of measuring dynamic resistance in the range of ambient temperatures during operation
Дата введения — 2025—03—01
1 Область применения
Настоящий стандарт распространяется на вновь разрабатываемые и модернизируемые пьезоэлектрические резонаторы (далее — резонаторы), предназначенные для работы в диапазоне частот до 150 МГц, и устанавливает два метода измерения: динамического сопротивления и относительного изменения динамического сопротивления в интервале температур среды при эксплуатации от минус 60 °C до плюс 125 °C.
Метод 1 — применяют при дискретных значениях температуры.
Метод 2 — применяют при непрерывном изменении температуры. Метод следует применять при наличии требований к монотонности температурно-частотной характеристики резонатора.
Общие требования при измерении и требования безопасности резонаторов — в соответствии с ГОСТ Р 71286.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 57438 Приборы пьезоэлектрические. Термины и определения
ГОСТ Р 71286 Приборы пьезоэлектрические и фильтры электромеханические. Общие требования при измерении параметров
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 57438.
Издание официальное
1
ГОСТ Р 71419—2024
4 Метод измерения динамического сопротивления
при дискретных значениях температуры
4.1 Принцип, условия и режим измерений
4.1.1 Измерение динамического сопротивления заключается в измерении активного сопротивления резонатора, включенного в измерительный четырехполюсник или мост, при максимальном коэффициенте передачи.
Резонатор может быть возбужден активным или пассивным способом.
4.1.2 Измерения проводят при фиксированных значениях температуры среды в интервалах температур среды при эксплуатации, установленных в стандартах или технических условиях (ТУ) на резонаторы конкретных типов; интервалы между фиксированными значениями температуры не должны превышать 10 °C.
4.1.3 Мощность, рассеиваемая на резонаторе при измерении динамического сопротивления, должна соответствовать установленной в стандартах или ТУ на резонаторы конкретных типов.
4.2 Требования к средствам измерения и вспомогательному оборудованию
4.2.1 Требования к средствам измерения и вспомогательному оборудованию — в соответствии с ГОСТ Р 71286, а также с учетом уточнений и дополнений, приведенных в данном разделе.
4.2.2 Измерения следует проводить на установке с активным способом возбуждения, структурная схема которой приведена на рисунке 1, в диапазоне частот от 500 Гц до 150 МГц или на установке с пассивным способом возбуждения, структурная схема которой приведена на рисунке 2, в диапазоне частот от 1 до 100 МГц.

Е1 —термостатирующая камера; G1 — генератор с измерительным четырехполюсником в цепи положительной обратной связи (Е2); XS1, XS2 — гнезда для подключения резонаторов; XT1, XT2 — разъемные соединения
Рисунок 1
4.2.3 Термостатирующая камера должна обеспечивать установление и подержание температуры в любой точке интервала температур среды при эксплуатации от минус 60 °C до плюс 125 °C с погрешностью в пределах ±2 °C.
Время установления верхнего (плюс 125 °C) или нижнего (минус 60 °C) значения температуры не должно превышать 60 мин.
4.2.4 Генератор с измерительным четырехполюсником в цепи положительной обратной связи (G1) должен обеспечивать измерение динамического сопротивления в диапазоне частот 500 Гц—150 МГц с погрешностью в пределах ±(2—20) % и удовлетворять следующим требованиям:
- диапазон измеряемых сопротивлений 1 Ом — 300 кОм;
- уровень напряжения на входе четырехполюсника должен соответствовать мощности рассеивания, установленной в ТУ на резонаторы конкретных типов;
- погрешность частоты в пределах ±2 • 10-6.
2
ГОСТ Р 71419—2024
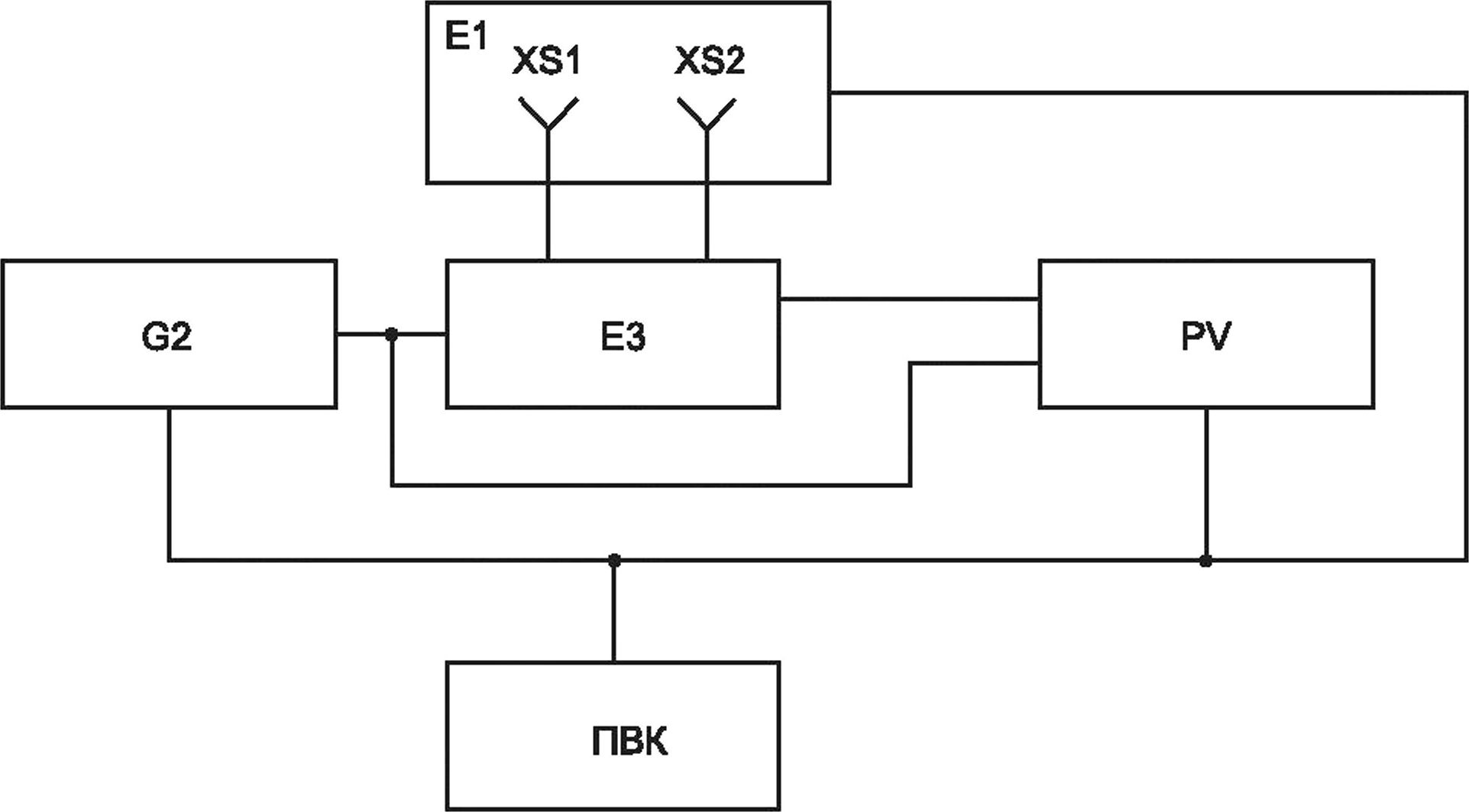
G2 — генератор; Е1 — термостатирующая камера; ЕЗ — измерительный четырехполюсник или измерительная мостовая схема; PV — векторный вольтметр; ПВК — программновычислительный комплекс; XS1, XS2 — гнезда для подключения резонаторов
Рисунок 2
4.2.5 Генератор (G2) должен обеспечивать возбуждение резонаторов в диапазоне 1—100 МГц при мощности рассеивания, установленной в ТУ на резонаторы конкретных типов и удовлетворять следующим требованиям:
- уровень шума и ослабления гармонических составляющих не менее 40 дБ;
- нестабильность частоты за время измерения в пределах ±2 • 10-6;
- погрешность установления и поддержания напряжения выходного сигнала в пределах ±0,1 дБ.
4.2.6 Измерительный четырехполюсник должен обеспечивать измерение динамического сопротивления в диапазоне частот 1—100 МГц при согласованной нагрузке на входе и выходе 50 Ом и удовлетворять следующим требованиям:
- емкость между контактами для подключения резонаторов не более 1 пФ.
4.2.7 Измерительная мостовая схема должна удовлетворять следующим требованиям:
- пределы компенсируемой емкости до 12 пФ;
- остаточная индуктивность в пределах (1,5—60,0) • 10-9 Гн;
- остаточное сопротивление в пределах 0,01—1,00 Ом.
4.2.8 Векторный вольтметр должен удовлетворять следующим требованиям:
- разрешающая способность измерения не более 0,2°;
- погрешность измерения напряжения в пределах ±(0,5—6) %.
4.2.9 Программно-вычислительный комплекс (ПВК) должен обеспечивать объем памяти и быстродействие, достаточное для обработки и регистрации результатов измерения с погрешностью в пределах ±0,1 % в реальном масштабе времени и в соответствии с производительностью термостатирующей камеры.
4.3 Подготовка и проведение измерений
4.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
4.3.2 Устанавливают резонаторы в гнезда термостатирующей камеры.
4.3.3 Настраивают генератор на резонансную частоту по нулю фазы или минимуму напряжения на резонаторе.
4.3.4 Доводят температуру в термостатирующей камере до нижнего значения интервала температур среды при эксплуатации и выдерживают в течение 15 мин.
4.3.5 Измеряют динамическое сопротивление резонаторов при нижнем значении интервала температур среды при эксплуатации.
4.3.6 Повышают температуру в термостатирующей камере до верхнего значения интервала температур среды при эксплуатации, делая остановки в температурных точках, указанных в 4.1.2, а также при температуре настройки. Выдерживают резонаторы в каждой точке в течение времени, установлен-
3
ГОСТ Р 71419—2024
ного в стандартах или ТУ на резонаторы конкретных типов, но не менее 2 мин, и измеряют динамическое сопротивление.
4.4 Обработка результатов измерений
Относительное изменение динамического сопротивления — в интервале температур среды при эксплуатации рассчитывают по формуле 1
^^ _ ^шах ^1 или _ ^1 ^min Ry Ry Ry Ry
где Ятах, Rmin — максимальное и минимальное значения динамического сопротивления соответственно, Ом;
Ry — значение динамического сопротивления при температуре настройки, Ом.
За относительное изменение динамического сопротивления в интервале температур среды при эксплуатации принимают наибольшее из значений, полученных по формуле (1).
4.5 Показатели точности измерений
4.5.1 Показатели точности измерений динамического сопротивления должны соответствовать установленным в стандартах или ТУ на резонаторы конкретных типов.
Границы интервала, в котором с установленной вероятностью 0,95 находится погрешность измерения динамического сопротивления 3R, %, определяют по формуле
с \2 / д
Зо =±1,96. - + а-Д-100
(2)
где 8 — погрешность измерительной установки, %;
Д0 — погрешность установления и поддержания температуры, °C;
а — коэффициент влияния температуры, вычисляемый по формуле
ЛК 1
Ry Д0
(3)
где ДО — интервал температур среды при эксплуатации, в котором определено наибольшее изменение динамического сопротивления Д/?, °C.
4.5.2 Границы интервала, в котором с установленной вероятностью 0,95 находится погрешность определения относительного изменения динамического сопротивления в интервале температур среды при эксплуатации 3^Ry %, определяют по формуле
-юс, t 3 J L К л/з J
(4)
где Д-р Д2 — случайная составляющая погрешности измерительной установки при измерении динамического сопротивления /?1 и Rmax (Rmin), Ом.
Примечание — При отсутствии данных за случайную составляющую погрешности измерительной установки принимают 1/3 ее предельной погрешности.
5 Метод измерения динамического сопротивления в интервале температур среды при эксплуатации при непрерывном изменении температуры
5.1 Принцип, условия и режим измерений
5.1.1 Принцип измерения динамического сопротивления в интервале температур среды при эксплуатации — в соответствии с 4.1.1.
4
ГОСТ Р 71419—2024
5.1.2 Измерения проводят при непрерывном изменении температуры среды в пределах интервалов температур среды при эксплуатации, установленных в стандартах или ТУ на резонаторы конкретных типов.
5.2 Требования к средствам измерения и вспомогательному оборудованию
5.2.1 Требования к средствам измерения и вспомогательному оборудованию — в соответствии с ГОСТ Р 71286, а также с учетом уточнений и дополнений, приведенных в данном разделе.
5.2.2 Измерения динамического сопротивления следует проводить на установке, структурная схема которой приведена на рисунке 3.
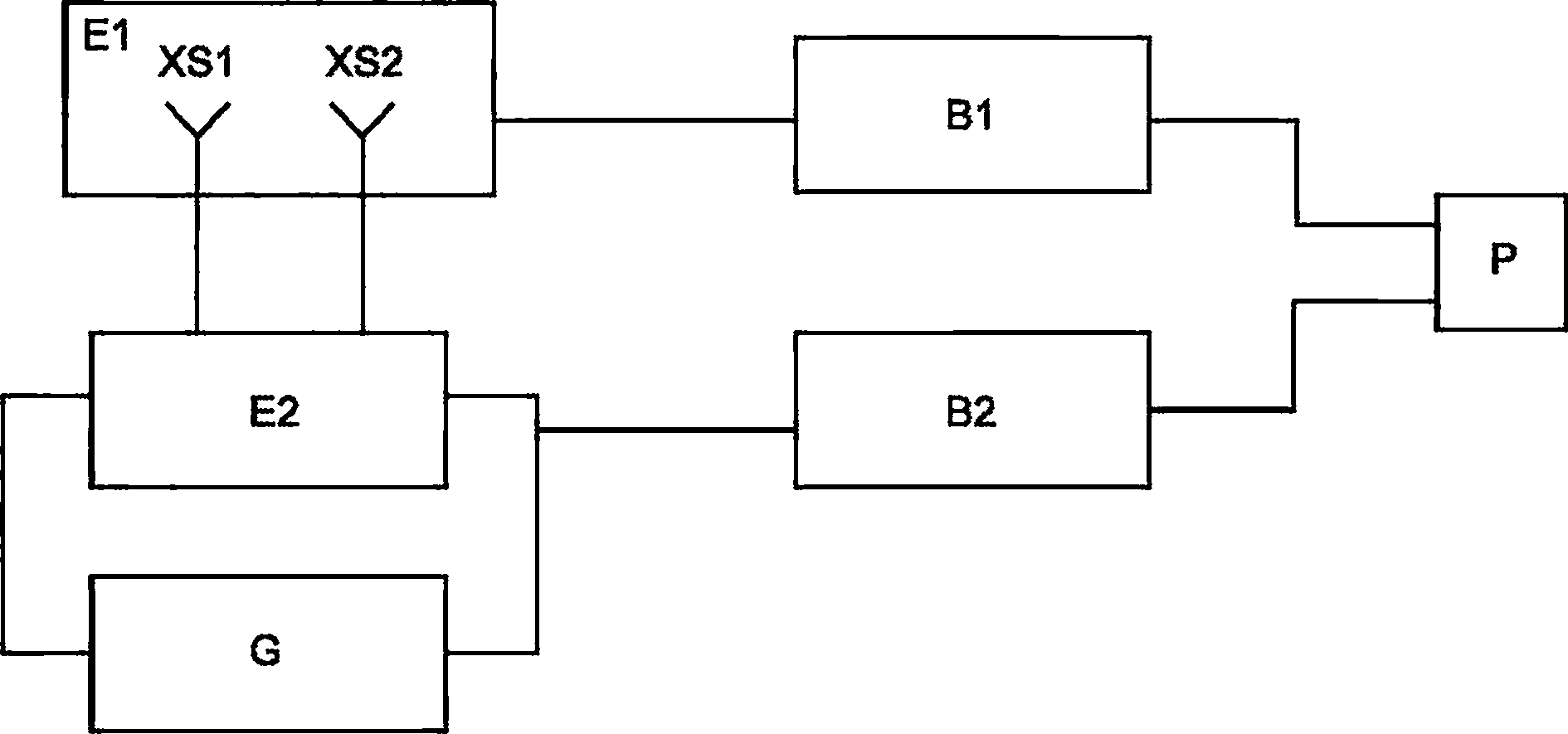
Е1 — термостатирующая камера; G — генератор с измерительным четырехполюсником в цепи положительной обратной связи (Е2); В1 — преобразователь температуры в напряжение; В2 — преобразователь динамического сопротивления в напряжение; Р — графопостроитель
Рисунок 3
5.2.3 Термостатирующая камера должна обеспечивать плавное изменение температуры в любом интервале температур среды при эксплуатации в диапазоне от минус 60 °C до плюс 125 °C и удовлетворять следующим требованиям:
- скорость изменения температуры — не более 10 °С/мин;
- погрешность установления и поддержания начального и конечного значений температур среды при эксплуатации интервала — в пределах ±1 °C.
5.2.4 Генератор с измерительным четырехполюсником в цепи положительной обратной связи должен удовлетворять требованиям 4.2.4.
5.2.5 Преобразователь температуры в напряжение должен обеспечивать аналоговый и цифровой выход информации и удовлетворять следующим требованиям:
- разрешающая способность — 0,01 °C;
- масштаб выходного напряжения — не менее 50 мВ/°С;
- полярность ввода напряжения должна соответствовать знаку температуры.
5.2.6 Преобразователь динамического сопротивления должен обеспечивать аналоговый и цифровой выход и масштаб записи динамического сопротивления не менее 30 мВ/Ом.
5.2.7 Графопостроитель должен обеспечивать регистрацию сигналов с погрешностью в пределах + 1,5 %.
5.3 Подготовка и проведение измерений
5.3.1 Подготавливают аппаратуру к работе в соответствии с эксплуатационной документацией.
5.3.2 Устанавливают резонаторы в гнезда переходных колодок термостатирующей камеры.
5.3.3 Доводят температуру в термостатирующей камере до нижнего значения интервала температур среды при эксплуатации и выдерживают при этой температуре в течение 15 мин.
5.3.4 Плавно повышают температуру в термостатирующей камере до верхнего значения интервала температур среды при эксплуатации, одновременно проводят измерение и запись на графике изменения температуры и динамического сопротивления.
5
ГОСТ Р 71419—2024
5.4 Обработка результатов измерений
5.4.1 Динамическое сопротивление резонаторов R, Ом, вычисляют по формуле
R=Y-Mr, (5)
где Y — ордината, соответствующая искомому значению динамического сопротивления, мм;
MR — масштаб записи динамического сопротивления, Ом/мм.
5.4.2 Относительное изменение динамического сопротивления в интервале температур среды AR
при эксплуатации — рассчитывают по формуле
Ri
AR Ymax~Yi AR
---= _rnax---L или = _J min. ,~, ^ Yy Ry Yy
где Утах, Ymin — ордината, соответствующая максимальному и минимальному значениям динамического сопротивления соответственно, мм;
У1 — ордината, соответствующая значению динамического сопротивления при температуре настройки, мм.
За относительное изменение динамического сопротивления в интервале температур среды при эксплуатации принимают наибольшее из значений, полученных по формуле (6).
5.5 Показатели точности измерений
5.5.1 Границы интервала, в котором с вероятностью 0,95 находится погрешность измерения динамического сопротивления 5R, %, определяют по формуле
(7)
где 8ЗП — погрешность записи динамического сопротивления на графике, %, вычисляемая по формуле
g3n _ Sr • AR Ri
(8)
здесь 8Г — погрешность графопостроителя, %;
AR — максимальное поле записи динамического сопротивления, Ом;
5СЧ — погрешность считывания динамического сопротивления, %, вычисляемая по формуле
§сч = ДЛ.1ОО «1
(9)
здесь Д^ — погрешность считывания динамического сопротивления с графика, мм.
5.5.2 Границы интервала, в котором с установленной вероятностью 0,95 находится погрешность определения относительного изменения динамического сопротивления в интервале температур среды при эксплуатации 5riRy определяют по формуле

(10)
где Азп — погрешность записи динамического сопротивления на графике, Ом, вычисляемая по формуле
АЗП = 8Г-ДК, (11)
Асч — погрешность считывания динамического сопротивления с графика, Ом, вычисляемая по формуле
Асч = А, • (12)
5.5.3 Пример расчета показателей точности приведен в приложении А.
6
ГОСТ Р 71419—2024
Приложение А (справочное)
Примеры расчета показателей точности
А.1 Метод 1
А.1.1 Исходные данные
Резонатор с частотой 10 МГц, изменение динамического сопротивления в интервале температур среды при эксплуатации от минус 10 °C до плюс 60 °C не более чем в два раза от значения при температуре настройки плюс 25 °C.
А.1.2 Используемая аппаратура
А.1.2.1 Генератор 14КПП-200-004, погрешность измерения динамического сопротивления в пределах ±(0,08Кизм + 0,2) Ом;
в одном приборе — ±(0,03Кизм + 0,2) Ом.
А.1.2.2 Термостат ТНР-2, погрешность установления и поддержания температуры в пределах ±2 °C.
Измерения проводят через 10 °C. Результаты измерений представлены в таблице А.1.
Таблица А.1
0, °C | -10 | 0 | 10 | 20 | 25 | 30 | 40 | 50 | 60 |
R, Ом | 20 | 27 | 29 | 30 | 32 | 40 | 46 | 28 | 30 |
Определяют относительное изменение динамического сопротивления по формуле (1)
^R 46-32 п лп ЛК 32-20 ---=-------= 0,43; ---=-------=0,37.
Ri 32 Ri 32
За относительное изменение принимают значение 0,43.
Определяют коэффициент влияния по формуле (3).
46-32
а -------
32
— = 0,0281/°C. 15
По формуле (2) определяют границы интервала, в котором с установленной вероятностью 0,95 находится погрешность измерения динамического сопротивления.
5R=±1,96-. - + 0,028 -^-100 =±8,24%.
По формуле (4) определяют границы интервала, в котором с установленной вероятностью 0,95 находится погрешность относительного изменения динамического сопротивления.
А.2 Метод 2
А.2.1 Исходные данные
Резонатор с частотой 10 МГц, изменение динамического сопротивления в интервале температур среды при эксплуатации от минус 10 °C до плюс 60 °C не более чем в два раза от значения при температуре настройки плюс 25 °C.
А.2.2 Используемая аппаратура
А.2.2.1 Регистратор 14ПУ-120-051, погрешность измерения в пределах ±0,1 ^изм. Масштаб записи динамического сопротивления 1 Ом/мм.
Относительная погрешность графопостроителя в пределах ±1,5 %.
Поле записи динамического сопротивления 100 Ом.
Погрешность считывания в пределах ±0,5 мм.
Коэффициент включения температуры 0,028 1/°С.
7
ГОСТ Р 71419—2024
А.2.2.2 Измеряют линейкой с ценой деления 1 мм ординаты точек, соответствующие ^, Rmjn, Rmax, и определяют относительное изменение по формуле (6)
AR 46 - 32
32
= 0,43;
^R 32-20
За относительное изменение принимают значение 0,43. Для дальнейшего расчета необходимо вычислить:
32
= 0,37.
По формуле (10) определяют границы интервала, в котором с установленной вероятностью 0,95 находится погрешность относительного изменения динамического сопротивления.
_ + t96
0,96 3
0,42 3
+ 2
1,5
0,5
15 А
• 100 = ±9,6 %
8
ГОСТ Р 71419—2024
УДК 621.372.412:006.354
ОКС 31.140
Ключевые слова: резонаторы пьезоэлектрические, методы измерения динамического сопротивления
9
Редактор Н.В. Таланова
Технический редактор И.Е. Черепкова
Корректор М.И. Першина
Компьютерная верстка Л.А. Круговой
Сдано в набор 07.06.2024. Подписано в печать 13.06.2024. Формат 60x847s. Гарнитура Ариал.
Усл. печ. л. 1,40. Уч.-изд. л. 1,18.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
