ГОСТ Р 56082-2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воздушный транспорт
Система менеджмента безопасности авиационной деятельности (СМБ-АД)
СИСТЕМА МЕНЕДЖМЕНТА БЕЗОПАСНОСТИ АВИАЦИОННОГО КОМПЛЕКСА ПОСТАВЩИКОВ ОБСЛУЖИВАНИЯ - ОРГАНИЗАЦИЙ ПО ОрВД
Руководство по системе менеджмента безопасности организаций по организации воздушного движения (ОрВД)
Air transport. Safety management system of aviation activity. Safety management system safety of aviation service suppliers, ATO, organizations. Manual on safety management system of air traffic, ATO organizations
ОКС 03.220.50
Дата введения 2015-03-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 034 "Воздушный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 июля 2014 г. N 820-ст
4 ВВЕДЕН ВПЕРВЫЕ
5 ИЗДАНИЕ (февраль 2020 г.) с Поправкой* (ИУС 12-2015)
_________________________
* См. ярлык "Примечания".
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
В настоящем стандарте использованы рекомендации Европейской ассоциации разработчиков методов анализа риска FERMA пo применению стандартизованных терминов в области авиации "FERMA: стандарт ИСО по управлению рисками" (Федерация европейских ассоциаций ISO по управлению рисками (FERMA) Kevin W., Knight A.M. "Risk Management: the Rood to Resilience - ISO 31000:2009 - ISO/IEC 31000 & ISO Guide 73-2009 - New Standards"*.
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Целью системы менеджмента безопасности авиационного комплекса поставщиков обслуживания воздушного движения - системы организации воздушного движения (системы ОрВД) является разработка показателей оценки уровня безопасности полетов при управлении воздушным движением (БП при УВД) в интересах организации единой для эксплуатантов воздушного транспорта (авиакомпаний), поставщиков обслуживания воздушного движения (систем ОрВД), организаций по техническому обслуживанию и эксплуатантов аэродромов системы упреждающего управления безопасностью полетов (СУУБП). Указанная система является составной частью системы менеджмента безопасности авиационной деятельности (СМБ АД).
Предлагаемая система менеджмента безопасности авиационного комплекса поставщиков обслуживания воздушного движения (системы ОрВД) включает в себя:
а) обоснование требований к показателям соответствующих оценок, которые рекомендуется использовать в Единой системе упреждающего управления уровнем безопасности полетов, основными из которых являются следующие:
- показатели оценок должны быть едиными как для эксплуатантов воздушного транспорта (авиакомпаний), организаций по техническому обслуживанию, эксплуатантов аэродромов, так и поставщиков обслуживания воздушного движения (систем ОрВД),
- показатели должны позволять проводить оценку не только обеспечиваемого уровня безопасности полетов, но и степени достоверности получаемых результатов,
- показатели должны позволять не только получать указанные выше оценки в реальном масштабе времени, но и проводить экстраполяцию тенденций изменения уровня безопасности (тренд) на заданные времена прогноза;
б) разработка показателей оценок в реальном масштабе времени уровня безопасности полетов воздушных судов, авиакомпаний и авиатранспортной системы России ("Росавиация") в целом, учитывающих как воздействие всех тех факторов риска, которые могут независимо друг от друга привести к катастрофе воздушного судна, так и различного рода причин, обусловливающих проявление указанных выше факторов. При этом показатели оценок уровня БП при УВД являются частными по отношению к указанным выше показателям при факторе риска, обусловленном сближением воздушных судов друг с другом и с препятствиями.
Предлагаемая система менеджмента безопасности авиационного комплекса поставщиков обслуживания воздушного движения (систем ОрВД) является дальнейшим развитием приведенной в таблице 3 ГОСТ Р 55862-2013 матрицы факторов риска, в соответствии с которой предполагаемый риск представляет собой меру количества опасности, измеряемую в форме экспертного значения сочетания двух величин - нормированной частоты или меры возможности случайного появления опасных событий и возможного ущерба от них. Отличие состоит в том, что в качестве показателя возможного ущерба от возникновения определенного события принята вероятность катастрофы воздушного судна, оценку величины которой проводят не путем фиксации частоты возникновения определенных событий на заданном интервале наблюдения, а посредством измерения степени близости текущего состояния воздушного судна к его критическому значению, при котором вероятность катастрофы равна 0,5. Это позволяет не только производить оценку обеспечиваемого системой менеджмента безопасности авиационной деятельности (СМБ АД) уровня безопасности полетов и степени ее достоверности в реальном масштабе времени, но и экстраполировать тенденции изменения этого уровня (тренд) на заданные времена прогноза, что является хорошей основой для последующей реализации системы упреждающего управления уровнем безопасности полетов. При факторе риска, обусловленном сближением воздушных судов друг с другом и препятствиями (БП при УВД), в качестве состояния ВС принимается вектор его расстояния до других воздушных судов и препятствий, а величина критического состояния определяется величиной известного пространственно-временного "критерия тау".
1 Область применения
Система менеджмента безопасности организаций воздушного движения (ОрВД) является составной частью системы управления безопасностью полетов (СУБП), входящей, в свою очередь, в состав системы менеджмента безопасности авиационной деятельности (СМБ АД).
Целью данного стандарта является разработка показателей оценок в реальном масштабе времени уровня безопасности полетов и степени их достоверности в интересах организации единой для эксплуатантов воздушного транспорта (авиакомпаний), поставщиков обслуживания воздушного движения (систем ОрВД), организаций по техническому обслуживанию и эксплуатантов аэродромов системы упреждающего управления безопасностью полетов (СУУБП). Областью применения последней является обеспечение с приемлемой степенью достоверности заданного значения уровня безопасности полетов в условиях неопределенности.
Стандарт предназначен для применения органами государственного регулирования и организациями, ответственными за управление безопасностью авиационной деятельности.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 55846 Принципы и методы определения приемлемого риска
ГОСТ Р 55862-2013 Система менеджмента безопасности авиационной деятельности (СМБ-АД)
ГОСТ Р 55866 Структура процедур и методы сбора и обработки данных ССПИ и эксплуатационного мониторинга
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины, определения и сокращения
3.1 В настоящем стандарте в соответствии с ГОСТ 55846* применены следующие термины:
________________
* Вероятно, ошибка оригинала. Следует читать: ГОСТ Р 55846. - .
3.1.1 система: Совокупность различных взаимосвязанных и взаимодействующих элементов, посредством которых реализуются процессы деятельности, направленные на достижение заданных целей.
3.1.2 регулирование безопасности: Применение норм и правил воздействия на процесс функционирования авиационной транспортной системы в целях обеспечения приемлемого уровня безопасности АД.
3.1.3 безопасность: Состояние системы, при котором риск снижен до приемлемого уровня и поддерживается на этом либо более низком уровне посредством непрерывного процесса выявления угроз, контроля факторов риска и управления состоянием.
3.1.4 риск: Мера количества опасности, измеряемая в форме экспертного значения сочетания двух величин - нормированной частоты или меры возможности случайного появления опасных событий и возможного ущерба от них.
3.1.5 приемлемость риска: Степень готовности общества к принятию данного риска.
3.1.6 вероятность катастрофы объекта: Вероятность того, что величина текущего состояния данного объекта не превысит его критического значения.
3.1.7 критическое состояние объекта: Состояние, при котором вероятность катастрофы данного объекта будет равна 0,5.
3.1.8 минимально-допустимое для нормального функционирования состояние объекта: Состояние, при котором обеспечивается заданное значение уровня безопасности объекта.
3.1.9 оценка текущего состояния объекта: Величина его действительного значения, измеренная с определенной степенью достоверности.
3.1.10 степень достоверности оценки: Степень ее близости к действительному значению текущего состояния объекта.
3.2 В настоящем стандарте применены следующие сокращения:
БП - безопасность полетов;
ВС - воздушное судно;
СМБ-АД - система менеджмента безопасности авиационной деятельности;
СУБП - система управления безопасностью полетов;
СУУБП - система упреждающего управления безопасностью полетов;
ОрВД - организация воздушного движения;
БП при УВД - безопасность полетов при управлении воздушным движением;
БВД - безопасность воздушного движения;
ЕС ОрВД РФ - Единая система организации воздушного движения Российской Федерации;
АТС РФ - авиатранспортная система Российской Федерации ("Росавиация").
4 Требования ИКАО по внедрению систем управления безопасностью полетов (СУБП)
В настоящее время ИКАО требует от всех эксплуатантов воздушного транспорта, организаций по техническому обслуживанию, поставщиков обслуживания воздушного движения (систем ОрВД) и эксплуатантов аэродромов внедрения систем управления безопасностью полетов (СУБП), одобренных государством (пункт 1.4.5 Руководства по управлению безопасностью полетов [1]).
Указанные системы должны обеспечивать решение следующих задач:
- обнаруживать фактические и потенциальные угрозы безопасности;
- гарантировать принятие конкретных мер, необходимых для уменьшения влияния факторов риска;
- обеспечивать непрерывный мониторинг и регулярную оценку достигнутого уровня безопасности полетов (БП).
При разработке указанных СУБП необходимо иметь в виду, что обеспечение БП каждого из воздушных судов (ВС) от его взлета до посадки - это непрерывный динамический процесс, включающий в себя аэропорт, управление воздушным движением, кабинный экипаж, наземную службу эксплуатационного обеспечения, полетную диспетчерскую службу (центры сопровождения полетов) и т.п., в силу чего для обеспечения надежного управления безопасностью полетов необходимо учитывать все указанные выше компоненты авиатранспортной системы РФ ("Росавиация").
С учетом изложенного системы СУБП, разрабатываемые в интересах как эксплуатантов воздушного транспорта, так и поставщиков обслуживания воздушного движения, должны быть функционально связаны между собой, а показатели качества их функционирования (в первую очередь уровень безопасности полетов) - едиными в рамках указанных выше СУБП.
В подтверждение этого в аналитической записке "О состоянии ОрВД в воздушном пространстве РФ в 2004 году", направленной Российской ассоциацией эксплуатантов воздушного транспорта в адрес Министра транспорта РФ (N 10.14/2-17/27 от 11.02.2005 г.), подчеркивается, что в существующей системе ОрВД РФ "... не организован объективный мониторинг состояния безопасности воздушного движения на базе количественных критериев оценки. Поэтому проводимые в ЕС ОрВД самооценки достигнутого уровня не всегда соответствуют аналогичным оценкам авиаперевозчиков. Отсутствие объективных оценок не позволяет системе ОрВД осуществить сравнение состояния безопасности воздушного движения в различных районах и зонах обслуживания, объективно судить о приоритетах инвестиций и видах необходимых работ по совершенствованию. В результате воздушное пространство РФ не является однородным с точки зрения качества представляемого обслуживания, как это требует ИКАО".
В настоящее время для оценки уровня безопасности полетов ИКАО предлагает показатель, основанный на приведенной в документе [1] двумерной концепции риска, в соответствии с которой предполагаемый риск, ассоциируемый с опасным событием, должен зависеть как от "степени вероятности" возникновения данного события, так и "степени серьезности" его последствий.
Так как при оценке "степени вероятности" возникновения определенного события массив его реализаций является, как правило, недостаточным для того, чтобы с заданной точностью определить соответствующую функцию распределения, ИКАО рекомендует оценку предполагаемого риска проводить без использования вероятности событий, а, по возможности, использовать частоту их появления.
Что касается "степени серьезности" последствий появления указанного события, то ИКАО предлагает указанную оценку проводить с помощью приведенной в таблице 6.1 [1] матрицы анализа рисков.
Как правило, данная оценка проводится с помощью метода экспертных систем на основе методических положений теории нечетких (размытых) множеств. Примером нечеткого множества может служить множество всех возможных ситуаций (ОС) в полете, в частности усложненные условия полетов (УУП), сложная (СС), аварийная (АС) и катастрофическая (КС) ситуации.
Как подчеркивается в работе [2], основоположник теории нечетких множеств А.А.Заде рассматривает ее как аппарат для анализа систем, в функционировании которых активное участие принимает человек. Принадлежность некоторого элемента нечеткому множеству характеризуется значением функции принадлежности F(x), равным 1, непринадлежность - значением 0.
С учетом изложенного в работе [3] предлагается следующий критерий обнаружения и фиксации особых ситуаций (т.е. фактических угроз безопасности), влияющих на уровень безопасности полетов:
 (1)
(1)
где F(x) - логическая функция принадлежности, представляющая собой дискретную функцию распределения вероятности событий в точках, соответствующих указанным выше особым ситуациям УУП, СС, АС и КС;
х - аргумент указанной функции (текущее значение параметра, характеризующего состояние ВС);
а - константа, определяющая область недопустимых значений параметра х.
В общем случае истинное значение состояния х имеет вид:
![]() , (2)
, (2)
где ![]() - погрешности оценки состояния
- погрешности оценки состояния ;
- среднеквадратическое отклонение (СКО) ошибок указанной оценки;
![]() ;
;
- заданное значение доверительной вероятности.
Достоверность оценки , характеризуемая степенью близости к ее истинному значению х, определяется с помощью следующего выражения:
![]() . (3)
. (3)
Так как при использовании метода нечетких множеств значения погрешностей считаются неизвестными, то степень достоверности принятия решений о наличии или отсутствии соответствующих особых ситуаций является довольно низкой.
Некоторого повышения указанной степени достоверности можно добиться посредством совместного использования методов нечетких множеств и байесовских оценок. В этом случае фигурирующие в выражении (3) параметры и
определяются или методом статистической обработки соответствующего массива результатов измерений состояния X (ансамбля реализаций), или методом статистического моделирования случайных процессов (метод Монте-Карло).
При этом указанные особые ситуации принадлежат нечеткому (размытому) множеству возможных значений состояния X, в силу чего степень неопределенности данного состояния, обусловленная как погрешностями , так и неучетом возможных факторов риска, предпосылок к ним и функциональных связей между параметрами состояния, является довольно высокой.
5 Предложения по показателям оценок уровня безопасности полетов воздушных судов, авиакомпаний и авиатранспортной системы России ("Росавиация") в целом
Ниже предлагается единая для авиатранспортной системы России ("Росавиация") методология оценки уровня безопасности полетов каждого из ВС, авиакомпаний и АТС РФ в целом, применение которой позволит, на наш взгляд, обеспечить приемлемую для гарантированного принятия соответствующих решений степень достоверности оценок состояния воздушных судов.
В основу указанной методологии положено приведенное в [1] определение безопасности, как "... состояния, при котором риск причинения вреда лицам или нанесения ущерба имуществу снижен до приемлемого уровня и поддерживается на этом или более низком уровне посредством непрерывного процесса выявления источников опасности и контроля факторов риска".
Из приведенного определения видно, что для решения задачи оценки уровня безопасности полета m-го ВС необходимо в первую очередь провести в реальном масштабе времени оценку состояния данного ВС, которая учитывала бы наряду с первичными измеряемыми параметрами состояния также воздействие указанных выше факторов риска, источников опасности, формируемых команд управления уровнем безопасности и т.п.
Для этого в качестве исходных предпосылок принимают следующие.
Первая. Пусть известны Р независимых друг от друга фактора риска, воздействие каждого из которых может привести к катастрофе m-го ВС.
Вторая. Пусть возникновение каждого из указанных факторов обусловлено влиянием I(р) взаимосвязанных причин.
Третья. Пусть на i-ю причину р-го фактора риска воздействует совокупность различного рода предпосылок и второстепенных факторов, оказывающих положительное или отрицательное влияние на состояние т-го ВС.
Четвертая. Пусть указанное состояние в соответствии с приведенными в работах [2], [6] методами главных компонент и факторного анализа может быть представлено в виде специально разработанной матрицы состояния.
С учетом изложенного состояние m-го ВС при i-й причине р-го фактора риска может быть представлено в следующем виде:
![]() , (4)
, (4)
где - оценка состояния при i-й главной причине (диагональные члены матрицы состояния);
![]() - совокупность J предпосылок и второстепенных факторов, оказывающих положительное или отрицательное влияние на состояние m-го ВС при i-й причине (внедиагональные члены матрицы состояния);
- совокупность J предпосылок и второстепенных факторов, оказывающих положительное или отрицательное влияние на состояние m-го ВС при i-й причине (внедиагональные члены матрицы состояния);
- суммарные погрешности оценки указанного состояния, оказывающие влияние на приведенную в выражении (3) степень достоверности.
Так как в общем случае приведенное в выражении (4) состояние m-го ВС характеризуется различной степенью его значимости ("веса") в предполагаемой катастрофе и зависит от многих, в том числе и случайных, факторов, т.е. носит случайный характер, то в соответствии с теорией вероятностей указанное состояние представляет собой случайную величину, которая в результате опыта может принимать то или иное значение, причем неизвестно заранее, какое именно (см. [4]).
Очевидно, что степень значимости состояния m-го ВС характеризует на качественном уровне степень угрозы его катастрофы. Для получения количественной оценки степени данной угрозы качественное значение указанной степени значимости нужно представить в виде вероятности катастрофы.
Для решения данной задачи необходимо определить и затем использовать функциональную связь качественного значения степени значимости состояния m-го ВС в предполагаемой катастрофе с величиной его вероятности. В соответствии с теорией вероятностей [4], [5] указанная связь описывается законом распределения случайной величины X, который представляет собой интегральную функцию распределения F(x), устанавливающую связь между возможными значениями х случайной величины Х и соответствующими им вероятностями. В общем случае указанная функция представляет собой вероятность события, состоящего в том, что случайная величина X примет значение, меньшее некоторой величины х, и имеет следующий вид:
![]() . (5)
. (5)
Данная функция исчерпывающим образом описывает распределение вероятностей и дает возможность вычислить вероятности любых событий (включая катастрофы объектов), связанных с непрерывной, дискретной или смешанной случайной величиной.
В случае непрерывной случайной величины X закон ее распределения может быть также задан в виде следующей функции плотности распределения вероятности события, именуемой как дифференциальная функция распределения вероятности события в точке х:
![]() . (6)
. (6)
В соответствии с теорией вероятностей [4] функция распределения F(x) любой точке ставит в соответствие вероятность F(
)=P{X<
}. Точка
, для которой выполняется условие p=F(
), называется квантилью уровня р.
Если в качестве событий рассматривать катастрофы объектов, то указанные выше вероятности событий будут представлять собой соответствующие вероятности катастроф.
Для этого нужно выбрать такое значение квантили , для которой вероятность события считается заранее известной. В теории вероятностей в качестве такого значения принята медиана. Медианой называется квантиль, соответствующая значению
, при котором вероятность события равна 0,5:
 . (7)
. (7)
Применительно к теории катастроф значение , соответствующее вероятности события, равной 0,5, будем называть критическим состоянием объекта х
, при котором вероятность катастрофы данного объекта равна 0,5.
С учетом изложенного вероятность катастрофы m-го ВС представляет собой интегральную функцию распределения вероятностей следующего вида:
![]() . (8)
. (8)
В интересах последующего практического применения данной функции проведем ее преобразование к виду, удобному для использования. Для этого используют приведенное в работах [4, 5] нормированное значение аргумента функции распределения (5) следующего вида:
![]() . (9)
. (9)
Приняв в данном выражении ![]() и
и ![]() , получают следующее выражение для нормированного аргумента функции распределения (8):
, получают следующее выражение для нормированного аргумента функции распределения (8):
 , (10)
, (10)
где - СКО ошибок определения критического состояния
.
Видно, что указанный аргумент характеризует степень близости оценки текущего состояния объекта (m-го ВС) ее критическому значению х
, при котором вероятность катастрофы Р
(т) равна 0,5, т.е. является количественной мерой степени угрозы катастрофы.
С учетом изложенного ниже под аргументом понимают коэффициент угрозы катастрофы т-го ВС.
Необходимо отметить, что в настоящее время ни критическое состояние , ни тем более СКО ошибок его определения считаются неизвестными и в существующих показателях оценок вероятностей катастроф не используются.
Выходом из создавшегося положения является использование в выражении (10) также и такого значения состояния ВС, при котором будет обеспечен заданный уровень БП.
В качестве указанного значения на основании требований норм летной годности и других нормативно-правовых документов проводят обоснование такого значения состояния ВС, при котором обеспечивается его нормальное функционирование.
В этом случае, т.е. при ![]() , выражение (10) примет вид:
, выражение (10) примет вид:
 , (11)
, (11)
где - заданное значение коэффициента угрозы катастрофы, при котором вероятность катастрофы ВС равна ее заданному значению P
.
Определяя по выражению (11) значение величины СКО и подставляя его затем в выражение (10), получают окончательное выражение для коэффициента
следующего вида:
 , (12)
, (12)
Здесь параметры ,
и
задаются заранее, а оценка состояния
проводится либо дискретно в точках особых ситуаций КС, АС, СС и УУП методом экспертных систем, либо квазинепрерывно по данным измерений первичных параметров.
Методика расчета критического расстояния применительно к оценке безопасности полетов при управлении воздушным движением приведена в работе [7].
При этом вероятность катастрофы ВС, представляющая собой нормированную интегральную функцию F(), в случае линейной зависимости
![]() подчиняется экспоненциальному закону распределения и рассчитывается с помощью следующего выражения:
подчиняется экспоненциальному закону распределения и рассчитывается с помощью следующего выражения:
![]() , (13)
, (13)
где  - масштабирующий коэффициент, определяемый на основании заданных значений
- масштабирующий коэффициент, определяемый на основании заданных значений и
.
Заданное значение коэффициента выбирают из условия удобства пользования специально организуемой и единой для непрерывных и дискретных случайных величин, характеризующих состояние различного рода объектов, количественной шкалой оценки степени угроз их катастроф.
По аналогии с десятибалльной шкалой оценки силы стихийных воздействий за заданное значение коэффициента угроз катастроф принимают значение, равное десяти (=10).
Анализ выражений (12) и (13) показывает, что при ![]() =0 и
=0 и =0,5. С другой стороны, при
![]() и
и ![]() .
.
Так как выполнение в точках =0 и
![]() условий
условий =0,5 и
![]() не зависит от воздействия различного рода факторов, то выражение (12) в указанных точках обладает свойством инвариантности (неизменности), что позволит избежать грубых ошибок при расчете данного коэффициента в остальных точках диапазона изменения состояния Х.
не зависит от воздействия различного рода факторов, то выражение (12) в указанных точках обладает свойством инвариантности (неизменности), что позволит избежать грубых ошибок при расчете данного коэффициента в остальных точках диапазона изменения состояния Х.
Очевидно, что приведенный в выражении (12) показатель можно рекомендовать в качестве единого для всех видов транспортных средств (в первую очередь воздушных судов) показателя угрозы их катастрофы, который функционально связан как с параметром , характеризующим текущее состояние исследуемого объекта, так и с задаваемыми на основе требований нормативных документов, проведенных исследований, экспертных оценок и т.п. параметрами х
и х
.
При этом также решаются проблемы сопоставимости результатов измерения состояния объектов, полученных разными методами (приборами), и шкалирования этих результатов.
Если состояние X объекта в силу ряда причин не представляется возможным измерить непосредственно, то используется квалиметрический метод количественных оценок указанного состояния по степени его качественного изменения, проводимых в определенных дискретных точках. При этом каждому из дискретных качественных состояний объекта приводится во взаимно однозначное соответствие определенное количественное значение коэффициента f и затем - вероятность катастрофы данного объекта.
На рисунке 1 приведена логическая последовательность расчета вероятности катастрофы ВС в точках особых ситуаций КС, АС, СС и УУП при =5·10
.
|
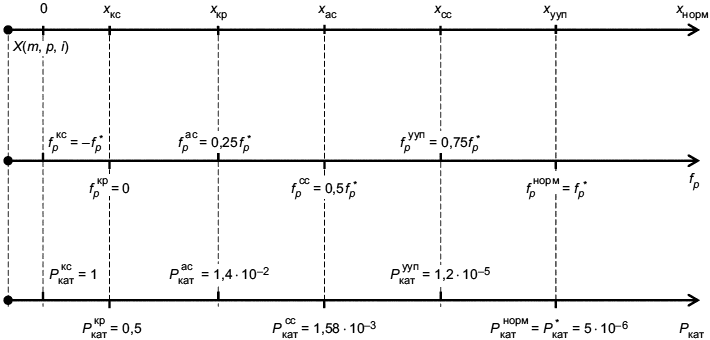
Рисунок 1
С учетом изложенного в приведенной в [1, пункт 13.2.1] двумерной концепции риска в качестве опасного события предлагается использовать событие, приводящее к указанному выше критическому состоянию т-го ВС, а в качестве показателя оценки "степени серьезности" его наступления - вероятность катастрофы данного ВС.
Так как в этом случае вероятность возникновения критического состояния заранее известна и представляет собой вероятность катастрофы, равную 0,5, указанная двумерная концепция риска существенно упрощается и представляет собой приведенную в выражении (13) вероятность катастрофы т-го ВС.
При этом оценку данной вероятности проводят не путем фиксации частоты наступления опасных событий, а посредством оценки степени близости текущего состояния т-го ВС к его критическому значению.
Что касается приведенных выше требований к СУБП в части обнаружения угроз безопасности и гарантированного принятия мер (решений), направленных на уменьшение влияния различного рода воздействий на уровень БП т-го ВС, предлагается следующий критерий обнаружения опасной (конфликтной) ситуации:
![]() . (14)
. (14)
При этом качество принимаемых решений о наличии или отсутствии ОС или КС зависит от вероятностей их правильного или ложного обнаружения. Можно показать, что указанные вероятности связаны с приведенной в выражении (3) степенью достоверности оценки состояния X т-го ВС, которая, в свою очередь, является характеристикой степени гарантированности принятия указанных выше решений [2].
При обнаружении ОС (КС), т.е. при ![]() , принимают решение о разрешении опасной (конфликтной) ситуации, для чего в СУБП формируются управляющие воздействия, которые посредством изменения приведенных в выражении (4) коэффициентов
, принимают решение о разрешении опасной (конфликтной) ситуации, для чего в СУБП формируются управляющие воздействия, которые посредством изменения приведенных в выражении (4) коэффициентов обеспечивают выполнение условия (14).
Для упреждающего управления уровнем БП т-го ВС проводят экстраполяцию состояния (4) и тенденций его изменения на заданные интервалы прогноза, в результате чего обнаруживаются потенциальные ОС (КС), что позволит их заблаговременно предотвратить.
Необходимо отметить, что принятие указанных выше решений по обеспечению нормального состояния т-го ВС производят с помощью не вероятностных критериев типа ![]() , а количественного критерия (14), что позволит исключить дополнительные ошибки, обусловленные некорректной аппроксимацией закона распределения вероятности
, а количественного критерия (14), что позволит исключить дополнительные ошибки, обусловленные некорректной аппроксимацией закона распределения вероятности ![]() .
.
Ниже предлагается указанную вероятность использовать только для мониторинга уровня БП, обеспечиваемого как каждым из ВС, так и каждой из авиакомпаний и авиатранспортной системой России ("Росавиация") в целом.
При расчете вероятности ![]() катастрофы т-го ВС в результате воздействия на него р-го фактора риска необходимо четко понимать, что I(р) причин возникновения данного фактора связаны между собой таким образом, что при определенных обстоятельствах только одна из них является главной, а остальные I(р-1) причин являются второстепенными, оказывая положительное или отрицательное влияние на главную причину. Решение о том, какая из I(р) причин является в данный момент главной, принимают на основе анализа специально разработанной матрицы состояния т-го ВС при воздействии на него р-го фактора риска.
катастрофы т-го ВС в результате воздействия на него р-го фактора риска необходимо четко понимать, что I(р) причин возникновения данного фактора связаны между собой таким образом, что при определенных обстоятельствах только одна из них является главной, а остальные I(р-1) причин являются второстепенными, оказывая положительное или отрицательное влияние на главную причину. Решение о том, какая из I(р) причин является в данный момент главной, принимают на основе анализа специально разработанной матрицы состояния т-го ВС при воздействии на него р-го фактора риска.
В данной матрице, кроме указанных выше I(р) причин, учитывают также влияние человеческого фактора (экипажа ВС и диспетчерских служб), различного рода возмущающих воздействий, формируемых СУБП команд управления и т.п.
С учетом изложенного, вероятность ![]() рассчитывают с помощью выражения (13), где
рассчитывают с помощью выражения (13), где ![]() - коэффициент угрозы катастрофы при состоянии х (т; р) т-го ВС, определяемого с помощью выражения (4).
- коэффициент угрозы катастрофы при состоянии х (т; р) т-го ВС, определяемого с помощью выражения (4).
Так как Р факторов риска независимы друг от друга и каждый из них независимо от другого может привести к катастрофе, то вероятность катастрофы т-го ВС при воздействии указанных факторов может быть представлена в следующем виде:
![]() . (15)
. (15)
При этом уровень БП, обеспечиваемый m-м ВС, в соответствии с принятой в ИКАО методологией имеет вид:
![]() , (16)
, (16)
где ![]() - продолжительность полета т-го ВС.
- продолжительность полета т-го ВС.
Уровень безопасности полетов, обеспечиваемый М(g) воздушными судами g-й авиакомпании, рассчитывают с помощью следующего показателя:
![]() , (17)
, (17)
где ![]() - весовой коэффициент, определяющий "вес" т-го ВС в уровне БП g-й авиакомпании;
- весовой коэффициент, определяющий "вес" т-го ВС в уровне БП g-й авиакомпании;
здесь ![]() - суммарный налет ВС g-й авиакомпании.
- суммарный налет ВС g-й авиакомпании.
Очевидно, что уровень безопасности полетов, обеспечиваемый авиатранспортной системой России ("Росавиация"), можно рассчитать с помощью показателя следующего вида:
![]() , (18)
, (18)
где ![]() - весовой коэффициент, определяющий "вес" g-й авиакомпании в уровне БП авиатранспортной системы России, состоящей из G авиакомпаний;
- весовой коэффициент, определяющий "вес" g-й авиакомпании в уровне БП авиатранспортной системы России, состоящей из G авиакомпаний;
![]() - суммарный налет ВС (объем авиационной деятельности) G авиакомпаний.
- суммарный налет ВС (объем авиационной деятельности) G авиакомпаний.
В заключение необходимо отметить, что приведенные выше методологические принципы и единую десятибалльную шкалу оценок можно также использовать и для оценки уровня транспортной безопасности транспортной системы России в целом, включающей в себя не только авиатранспортную систему, но и другие виды транспорта (железнодорожный, морской, автомобильный и др.).
6 Система менеджмента безопасности авиационного комплекса поставщиков обслуживания воздушного движения (систем ОрВД)
6.1 Требования, предъявляемые к системе ОрВД по гарантированному обеспечению ею приемлемого уровня безопасности воздушного движения
Оценку уровня безопасности полетов ВС при управлении воздушным движением (БП при УВД) проводят с помощью приведенных выше показателей при р-м факторе риска, обусловленном сближением ВС друг с другом и препятствиями. В этом случае состояние X воздушного судна представляет собой расстояние до другого ВС или препятствия.
Анализ проблем ОрВД показал, что система ОрВД должна обеспечивать требуемые для конкретного района УВД пропускную способность, безопасность, регулярность и экономичность воздушного движения с учетом реальных условий ее функционирования.
Учитывая особую значимость проблемы обеспечения системой ОрВД безопасности воздушного движения, данная система должна не повышать, как это прописано в настоящее время в ряде существующих нормативных документов, величину уровня указанной безопасности, а в силу своего предназначения, обеспечивать его заданное (требуемое) значение в указанных выше условиях.
Ниже под реальными условиями функционирования системы ОрВД понимают изменяемые во времени плотность, динамику воздушного движения (т.е. нерегулярные и нестационарные потоки ВС) и ошибки определения координат ВС, разрывность полей радиосвязи, наблюдения и навигации, частичные или полные отказы технических средств, комплексов и системы в целом, ошибки диспетчеров, а также заранее непредвиденные преднамеренные и непреднамеренные воздействия внешней среды (изменения метеоусловий, природные катаклизмы и т.п.).
Неучет указанных условий приводит к тому, что оценка обеспечиваемого системой ОрВД уровня БВД проводится, как правило, с настолько большими отклонениями от его истинного значения, что требование обеспечения данной системой заданного уровня безопасности теряет смысл [8].
Для решения указанной задачи прежде всего должны быть решены следующие проблемы:
а) оценку обеспечиваемого системой ОрВД уровня безопасности следует производить не посредством обработки данных об уже происшедших, т.е. зафиксированных ранее событиях (происшествиях и предпосылок к ним), а с учетом количественных оценок величины угроз столкновений, исходящих от конкретных пар ВС в текущий момент времени,
б) учитывая тот факт, что в указанной выше оценке уровня БВД полностью учесть реальные условия функционирования системы ОрВД невозможно, для каждой из систем ОрВД должны быть строго обоснованы допустимые (в терминологии ИКАО - приемлемые) пределы изменения заданного уровня БВД.
В этом случае можно говорить о гарантированном обеспечении заданного уровня БВД, под которым понимают его обеспечение в строго заданных для каждой из систем пределах.
С учетом изложенного целевой функцией системы ОрВД является достижение требуемой для конкретного района УВД пропускной способности при гарантированном обеспечении в реальных условиях функционирования данной системы заданного уровня безопасности и приемлемых (рекомендуемых) регулярности и экономичности воздушного движения.
При этом необходимо ответить на вопрос: система ОрВД должна гарантированно обеспечивать заданное значение уровня БВД в текущий момент времени или на определенном временном интервале, достаточном для восстановления ею указанного значения?
В первом случае для компенсации влияния изменяемых во времени условий функционирования системы ОрВД необходимо увеличить в определенное число раз заданное значение уровня БВД (например, в вертикальной плоскости воздушного пространства за заданное значение вместо 10 принято 1,25·10
![]() , т.е. увеличивают в восемь раз [9].) При этом на определенную величину должны быть также увеличены и соответствующие минимально допустимые интервалы эшелонирования, что влечет за собой снижение пропускной способности системы ОрВД и эффективности ее функционирования в целом.
, т.е. увеличивают в восемь раз [9].) При этом на определенную величину должны быть также увеличены и соответствующие минимально допустимые интервалы эшелонирования, что влечет за собой снижение пропускной способности системы ОрВД и эффективности ее функционирования в целом.
Во втором случае, чтобы не снижать пропускную способность системы ОрВД, допускается компенсация влияния указанных выше условий функционирования системы ОрВД не в текущий момент времени, а на определенном интервале восстановления ею заданного значения уровня безопасности за счет прогнозируемого дополнительного налета ВС на этом интервале. Если заданное значение указанного интервала достаточно велико, то система ОрВД может допустить также и кратковременные сближения конфликтующих ВС на расстояния, меньшие установленных интервалов эшелонирования.
Последнее косвенно отражено в проекте Федеральной целевой программы [10] следующим образом: средняя величина налета воздушных судов на один инцидент, происшедший по причинам аэронавигационного обслуживания, начиная с момента реализации программы (2009-2015 гг.) - не более 9,8·10 ч. Но, так как в [10] не указан "вес" инцидента, т.е. не определена допустимая степень сближения конфликтующих ВС друг с другом, возникает неопределенность в оценке возможностей системы ОрВД по обеспечению ею заданного уровня БВД.
6.2 Анализ существующих показателей оценки уровня безопасности воздушного движения
В настоящее время в качестве критерия оценки указанных выше возможностей принят следующий [11], [12]:
![]() , (19)
, (19)
где ![]() - заданное значение уровня БВД, в соответствии с которым допускается не более одного столкновения ВС по вине системы ОрВД на 10
- заданное значение уровня БВД, в соответствии с которым допускается не более одного столкновения ВС по вине системы ОрВД на 10 часов налета (т.е. строго определены и "цена" происшествия, и величина допустимого налета).
![]() , (20)
, (20)
где У - принятый в практике ИКАО количественный показатель оценки обеспечиваемого системой ОрВД фактического уровня БВД, определяемого как число n
столкновений ВС друг с другом и препятствиями, происшедших по вине системы ОрВД, отнесенное к суммарному налету ВС
в зоне ее ответственности за определенный период времени (как правило, один год).
Так как указанный показатель базируется на фиксации только фактов столкновений ВС, которые происходят крайне редко, то проверить с его помощью возможности системы ОрВД на предмет обеспечения ею заданного уровня БВД даже в течение времени ее эксплуатации весьма проблематично. Например, при среднесуточном налете в зоне УВД порядка 1000 ч. значение интервала восстановления системой ОрВД заданного уровня безопасности составляет порядка 270 лет. Кроме того, неэтично проводить оценку уровня БВД по числу столкновений, которые система ОрВД в силу своего предназначения не должна допускать.
В [1, пункт 17.2.5] подчеркивается, что, поскольку авиационные происшествия, т.е. столкновения, случаются редко, их частоту нельзя считать надежным показателем характеристик безопасности. Более полезным количественным показателем характеристик безопасности полетов при ОВД может быть частота инцидентов: донесений о случаях опасного сближения, нарушений норм эшелонирования, предупреждений и сигнализации TCAS [1, пункт 17.2.6]. В [1, пункт 17.2.9] подчеркивается, что в настоящее время для количественной оценки уровня БВД в воздушном пространстве сокращенного минимума вертикального эшелонирования (RVSM) используют математические модели риска столкновений, позволяющие рассчитывать ожидаемую частоту происшествий на основе данных о случаях отклонений ВС по высоте. Аналогичные модели используют и для оценки риска столкновений в результате боковых отклонений от линии пути в воздушном пространстве минимальных навигационных характеристик (MNPS) над Северной Атлантикой и в случаях океанического воздушного пространства, где применяются основанные на требуемых навигационных характеристиках (RNP) минимумы эшелонирования.
В работах [12], [13] под модельным риском понимается математическое ожидание частоты столкновений на 1 ч. полетного времени, рассчитываемое с помощью специальных математических моделей, при условии, что в качестве пространства модельных допущений приняты аксиомы Рейха, используемые в ИКАО в качестве приемлемой и консервативной основы при моделировании риска столкновений.
Данный риск характеризует априорный, в частности прогнозируемый на какой-либо интервал времени, уровень БВД, который может быть обеспечен системой ОрВД при указанных выше допущениях. Более того, так как адекватность используемых математических моделей реальным условиям функционирования системы ОрВД не доказана, степень достоверности оценок уровня БВД, а, следовательно, и границы их изменений неизвестны. При этом не может быть и речи об оценке с помощью математических моделей обеспечиваемого системой ОрВД фактического уровня безопасности в текущий момент времени и изменяемых во времени условиях ее функционирования.
6.3 Предложения по показателям оценок уровня безопасности воздушного движения каждого из ВС, систем ОрВД и ЕС ОрВД РФ в целом
Выход из создавшегося положения следует искать не на путях совершенствования существующих математических моделей риска столкновений, а с учётом приведенного в выражении (20) показателя оценки фактического уровня БВД, сделав его чувствительным не только к реальным условиям функционирования системы ОрВД, но и к их изменениям. Для этого в указанном показателе вместо числа n столкновений, когда вероятность Р
столкновений равна единице, нужно использовать сумму изменяющихся от нуля до единицы вероятностей столкновений всех М пар ВС. В этом случае показатель (20) принимает следующий вид:
![]() , (21)
, (21)
где ![]() - вероятность столкновения m-й пары ВС в текущий момент времени.
- вероятность столкновения m-й пары ВС в текущий момент времени.
Поскольку данная вероятность изменяется от нуля до единицы, она учитывает весь диапазон возможных значений угроз столкновения, включая и предельный случай, когда Р=1.
Очевидно, что существующий показатель (20), учитывающий только факты столкновений ВС, является частным по отношению к показателю (21).
При этом, если степень достоверности оценок с помощью показателя (20) равна единице (так как факт столкновения фиксируется документально), то степень достоверности оценок уровня БВД, получаемых с помощью показателя (21), зависит от степени учета в алгоритмах расчета вероятностей столкновений области неопределенности взаимного положения каждой из пар ВС, обусловленной влиянием реальных условий функционирования системы ОрВД.
В силу изложенного степень достоверности оценок вероятности Р в принципе может изменяться от нуля (когда величина области неопределенности неизвестна и в указанных алгоритмах не учитывается) до единицы (когда величина области неопределенности строго известна и полностью учитывается в соответствующих алгоритмах).
Что касается вероятности столкновения ![]() , то в соответствии с теорией вероятности [4] существуют два метода ее расчета: как частоты событий или с помощью функции распределения случайной величины. В последнем случае вместо фиксации числа выбросов случайного процесса в объем столкновений (метод Монте-Карло) проводят измерение следующих параметров взаимного положения конфликтующей пары ВС: текущей и критической дальностей между ВС и ошибок их измерения. При этом предполагается, что полет ВС m-й пары проводят в соответствии с правилами полетов по приборам (ППП) при гипотезе радиолокационного управления. С учетом изложенного указанная функция представляет собой вероятность того, что измеренное значение текущей дальности
, то в соответствии с теорией вероятности [4] существуют два метода ее расчета: как частоты событий или с помощью функции распределения случайной величины. В последнем случае вместо фиксации числа выбросов случайного процесса в объем столкновений (метод Монте-Карло) проводят измерение следующих параметров взаимного положения конфликтующей пары ВС: текущей и критической дальностей между ВС и ошибок их измерения. При этом предполагается, что полет ВС m-й пары проводят в соответствии с правилами полетов по приборам (ППП) при гипотезе радиолокационного управления. С учетом изложенного указанная функция представляет собой вероятность того, что измеренное значение текущей дальности будет меньше ее критического значения.
При этом вероятность столкновения ВС указанной пары в соответствии с работами [7], [14] имеет вид:
![]() , (22)
, (22)
где а1 - масштабирующий коэффициент.
Очевидно, что при
![]() , (23)
, (23)
где - заданное значение коэффициента
угрозы столкновения m-й пары ВС, при котором обеспечиваются требуемое значение вероятности (22) и, следовательно, заданный уровень БВД.
В соответствии со статистической теорией оценок результатов измерений действительное значение указанного коэффициента определяют по формуле:
![]() , (24)
, (24)
где и
- оценка и среднеквадратическое отклонение (СКО) соответственно ошибок этой оценки;
![]() ;
;
здесь Р - заданное значение доверительной вероятности;
![]() - величина доверительного интервала, в котором с заданной вероятностью Р
- величина доверительного интервала, в котором с заданной вероятностью Р должно находиться действительное значение
коэффициента угроз столкновения
;
- показатель степени достоверности оценки
, характеризующий степень ее близости к действительному значению
и определяемый по формуле:
 . (25)
. (25)
6.4 Предложения по оценке вероятности обеспечения системой ОрВД приемлемого уровня безопасности воздушного движения
Необходимо подчеркнуть, что приведенные выше оценки получены в предположении пассивного режима работы системы ОрВД, когда по данным подсистем планирования и наблюдения проводят анализ воздушной обстановки и обнаружение конфликтных ситуаций в соответствии со следующим критерием:
![]() . (26)
. (26)
Очевидно, что в случаях, когда условие (26) не выполняется, фиксируется факт обнаружения конфликтной ситуации (КС). При этом система ОрВД обязана предпринять соответствующие меры для обеспечения т-й парой ВС заданного значения коэффициента , активно воздействуя посредством формирования соответствующих команд управления полетом одного или обеих ВС на значение оценки
![]() (т.е. активный режим работы).
(т.е. активный режим работы).
При этом выполнение условия (26) будет обеспечено с определенной вероятностью, зависящей от характеристик обнаружения конфликтов, ошибок диспетчера в процессе формирования соответствующих команд управления, искажения этих команд в каналах воздушной радиосвязи, ошибочных действий экипажей ВС, маневренных особенностей ВС и т.п.
Очевидно, что указанная вероятность, являясь дальнейшим развитием вероятности радиолокационного управления, характеризует надежность совместного (системы ОрВД и соответствующих ВС) разрешения обнаруженной конфликтной ситуации и может быть представлена в следующем виде:
![]() , (27)
, (27)
где - вероятность правильного обнаружения конфликта;
- вероятность безошибочного формирования системой ОрВД команд управления по разрешению обнаруженных конфликтов;
- вероятность безошибочной передачи указанных команд на борт соответствующего ВС;
- вероятность безошибочного выполнения данным ВС принятой команды управления.
Приведенное в выражении (24) действительное значение коэффициента угрозы столкновения т-й пары ВС определялось на основании данных пассивного режима работы системы ОрВД, т.е. с учетом только ошибок измерений параметров взаимного положения конфликтующих ВС.
Однако в активном режиме работы данной системы, когда она формирует команды управления по обеспечению заданного значения коэффициента угроз столкновения, действительное значение
указанного коэффициента в соответствии с теорией оптимального управления примет вид
![]() . (28)
. (28)
Коэффициент характеризует степень достоверности оценок угроз столкновений, исходящих от т-й пары ВС, изменяется в зависимости от степени учета реальных условий функционирования и надежности разрешения конфликта от нуля до единицы и равен своему следующему значению:
 . (29)
. (29)
Приведенная в выражении (28) разница ![]() между заданным и обеспечиваемым системой ОрВД значениями коэффициента угроз столкновения характеризует величину его приращения, требуемую для выполнения условия
между заданным и обеспечиваемым системой ОрВД значениями коэффициента угроз столкновения характеризует величину его приращения, требуемую для выполнения условия ![]() .
.
Видно, что при пассивном режиме работы системы ОрВД, когда команды управления отсутствуют (т.е., когда K![]() =0),
=0), ![]() и действительное значение коэффициента угроз равно приведенному в выражении (24).
и действительное значение коэффициента угроз равно приведенному в выражении (24).
Для того чтобы система ОрВД гарантированно, т.е. в строго заданных пределах, обеспечивала заданное значение уровня БВД, необходимо, чтобы приведенный в выражении (29) коэффициент
был не хуже своего заданного значения
. Для этого, в свою очередь, необходимо, чтобы система ОрВД обеспечивала степень достоверности
и надежность разрешения конфликтов K
![]() не хуже их заданных для каждой из систем ОрВД значений.
не хуже их заданных для каждой из систем ОрВД значений.
При этом допускается компенсация влияния реальных условий ее функционирования не в текущий момент времени, а на определенном интервале за счет учета прогнозируемого дополнительного налета ВС.
Обеспечиваемый системой ОрВД в текущий момент времени указанный интервал, в сутках, имеет вид:
 , (30)
, (30)
где - величина заданного уровня БВД;
- оценка обеспечиваемого системой ОрВД в текущий момент времени уровня БВД;
- прогнозируемый среднесуточный налет ВС в зоне УВД.
7 Проблемы, которые необходимо решить в интересах обеспечения системами ОрВД приемлемого уровня безопасности воздушного движения
7.1 Система ОрВД должна не повышать уровень БВД, а в силу своего предназначения, обеспечивать его заданное значение в реальных условиях функционирования с требуемой степенью достоверности.
7.2 Если система ОрВД проводит оценку обеспечиваемого ею уровня БВД без учета изменяемых в реальном масштабе времени условий ее функционирования, то указанный уровень из-за различного рода неучтенных ошибок изменяется в настолько больших пределах, что утверждение об обеспечении данной системой его заданного значения теряет смысл.
7.3 В силу изложенного система ОрВД должна обеспечивать заданное значение уровня БВД не вообще, а гарантированно, т.е. в строго заданных для каждой из систем пределах (согласно терминологии ИКАО - обеспечивать не заданный, а приемлемый уровень).
7.4 Величина пределов изменения заданного уровня БВД зависит от степени достоверности количественных оценок угроз столкновений каждой из пар ВС и величины коэффициента надежности разрешения конфликтов.
7.5 Однако, вне зависимости от совершенства системы ОрВД, она никогда не будет в состоянии гарантированно (т.е. в строго заданных пределах) обеспечить заданное значение уровня БВД, если не будет надежно защищена от ошибочных действий диспетчеров УВД.
7.6 Указанная защита может быть обеспечена только при условии последовательной автоматизации следующих процессов УВД:
- обнаружение конфликтных и потенциально-конфликтных ситуаций;
- выработка рекомендаций диспетчеру по их разрешению;
- выработка команд управления и передачи их на борт ВС (реализация функции "Автодиспетчер").
7.7 Для того чтобы исключить также влияние ошибочных действий экипажей ВС на надежность разрешения конфликтов, в наземной системе предупреждения столкновений (НСПС) должна быть реализована функция автоматического управления ВС, аналогичная функции, используемой в настоящее время в бортовых системах предупреждения столкновений (БСПС).
7.8 Совместное решение системой ОрВД и соответствующими ВС задачи обеспечения приемлемого уровня БВД следует проводить в соответствии с принципом "разумной достаточности", когда допускается обеспечение требуемого значения указанного уровня не в текущий момент времени, а на заданном интервале его восстановления, т.е. с учетом прогнозируемого дополнительного налета ВС на этом интервале. При этом оценку обеспечиваемого системой ОрВД уровня БВД следует проводить в текущий момент времени, а обеспечение данной системой заданного значения указанного уровня - на установленном интервале его восстановления.
7.9 Время восстановления системой ОрВД своего приемлемого значения характеризует ее потенциальные возможности, является важным системным показателем эффективности ее функционирования и, на наш взгляд, должно быть включено в требуемые системные характеристики системы ОрВД (RTSP).
7.10 Невозможность системы ОрВД восстановить в установленные сроки заданное значение уровня БВД следует классифицировать как ее отказ.
Библиография
[1] Руководство по управлению безопасностью полетов. Doc.9859, AN/460; ИКАО, Монреаль, 2006
[2] Стариков А.И., Зачеса В.Я. и др. Безопасность полетов летательных аппаратов. М.: "Транспорт", 1988
[3] Попов Ю.В., Комов А.А., Колитиевский Ю.М. Оценка констант в алгоритмах экспресс-анализа полетной информации // Научный вестник МГТУ ГА N 179, 2012. - С.92.
[4] Вентцель Е.С. Теория вероятностей. М.: "Наука", 1968
[5] Вентцель Е.С., Овчаров А.А. Теория вероятностей и ее инженерные приложения. М.: "Наука", 1988
[6] Максимов Г.К., Синицын А.Н. Статистическое моделирование многомерных систем в медицине. Л.: Ленинградское отделение изд. "Медицина", 1983
[7] Колитиевский Ю.М. Методология оценки уровня безопасности воздушного движения, обеспечиваемого системой ОрВД на этапах текущего планирования и непосредственного управления//Сборник трудов ВИНИТИ, РАН "Проблемы безопасности полетов" N 11. М., 1999
[8] Руководство по испытаниям радионавигационных средств. Том 3. Doc. 8071. ИКАО, 1998
[9] Руководство по применению минимума вертикального эшелонирования 300 м между эшелонами полета 290 и 410 включительно. Doc. 9574-AN/937, ИКАО, 1999
[10] Федеральная целевая программа "Модернизация Единой системы организации воздушного движения Российской Федерации (2009-2015 годы)" (проект)
[11] Концепция Федеральной целевой программы "Модернизация Единой системы организации воздушного движения Российской Федерации (2009-2015 годы)". Утверждена распоряжением Правительства РФ от 29.12.2007 г. N 1974-р
[12] Отчет по НИР "Создание научно-методической базы для перехода от существующей ЕС ОрВД к Федеральной аэронавигационной системе"/ГосНИИ "Аэронавигация". М., 2000
[13] Исходные данные на Калининградский район УВД/ГосНИИ "Аэронавигация". - М., 2006
[14] Колитиевский Ю.М. Методы оценки обеспечиваемого системой ОрВД уровня безопасности воздушного движения при использовании нетрадиционных критериев обнаружения конфликтных и потенциально конфликтных ситуаций // Научный вестник МГТУ ГА. Серия "Эксплуатация воздушного транспорта и ремонт авиационной техники. Безопасность полетов". - N 74 (8). - М., 2004
УДК 629.735.083:006.354 | ОКС 03.220.50 | |
Ключевые слова: система управления безопасностью, риск, обеспечение безопасности | ||
Электронный текст документа
и сверен по:
, 2020
