ГОСТ Р 52053-2003
Группа Г51
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
МАШИНЫ ТРЕЛЕВОЧНЫЕ ГУСЕНИЧНЫЕ
Параметры конструктивные.
Обозначения
Crawler skidders.
Definitions and specifications
ОКС 65.060.80
ОКП 47 2600
48 5100
Дата введения 2005-01-01
Предисловие
1 РАЗРАБОТАН И ВНЕСЕН Техническим комитетом по стандартизации ТК 361 "Лесные машины"
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 21 мая 2003 г. N 151-ст
3 ВВЕДЕН ВПЕРВЫЕ
1 Область применения
1 Область применения
Настоящий стандарт устанавливает единые обозначения конструктивных параметров, размеров и масс (далее - машины) на гусеничной базе в чокерном или бесчокерном исполнениях.
2 Конструктивные параметры и их обозначения
На рисунках 1-11 приведены обозначения основных параметров.
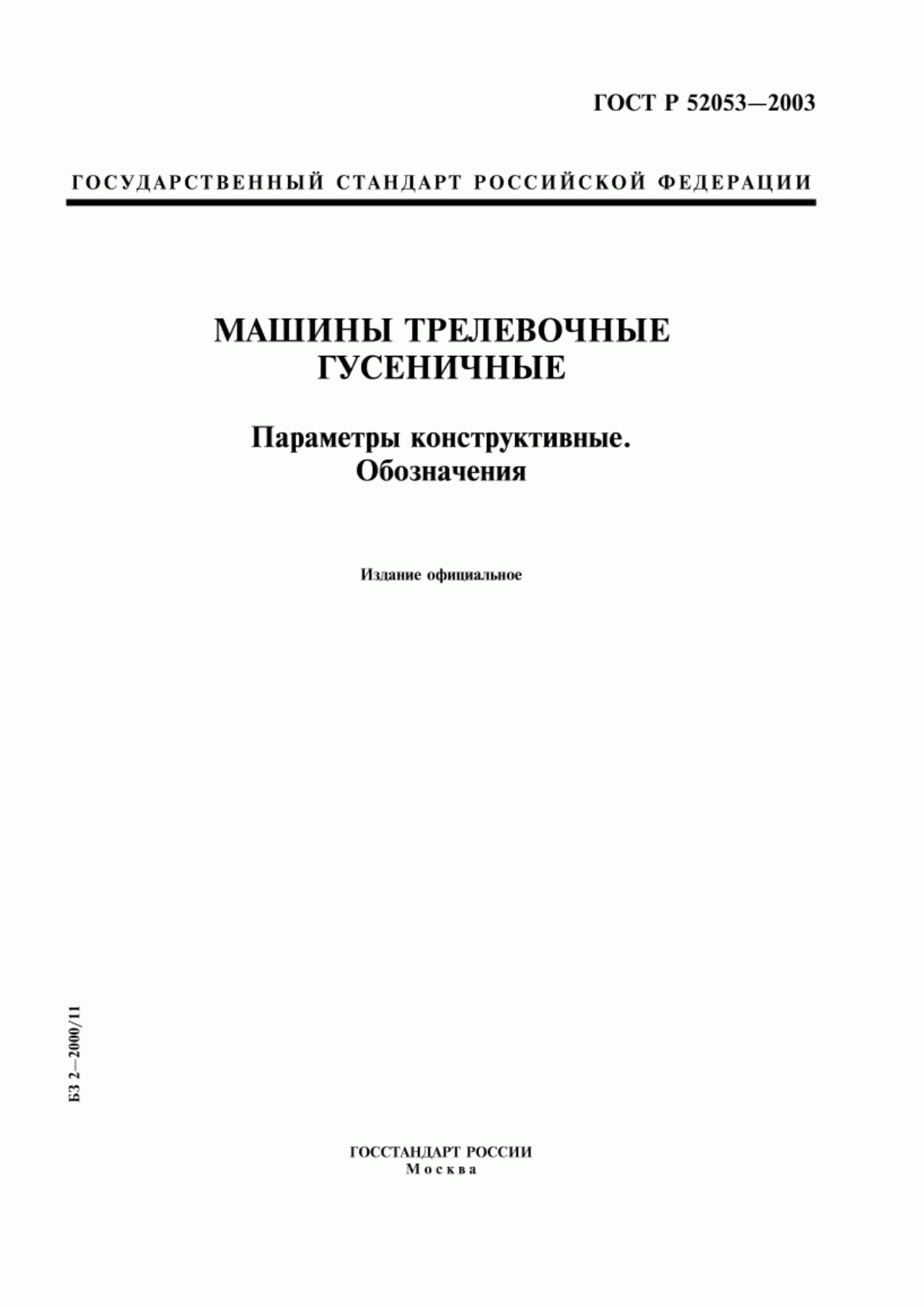
Рисунок 1. - Чокерная трелевочная машина с погрузочным щитом и основным канатом. Основные размеры
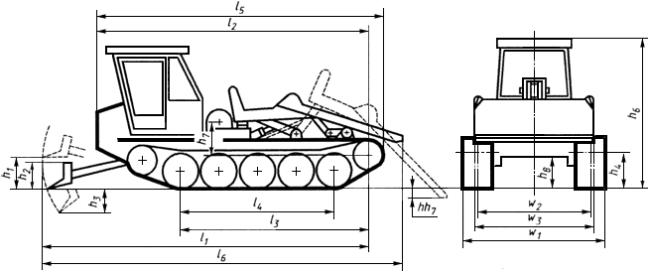
Рисунок 1 - Чокерная трелевочная машина с погрузочным щитом и основным канатом. Основные размеры
Рисунок 2. - Чокерная трелевочная машина с основным канатом на базе промышленного шасси. Основные размеры
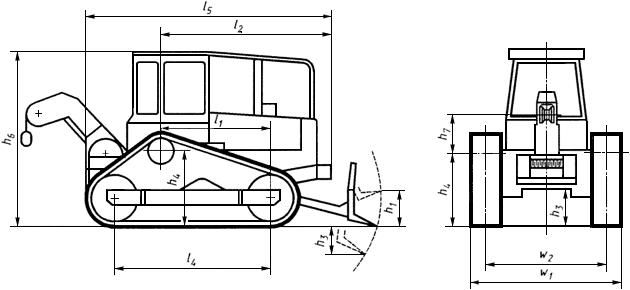
Рисунок 2 - Чокерная трелевочная машина с основным канатом на базе промышленного шасси. Основные размеры
Рисунок 3. - Трелевочная машина с пачковым захватом (челюстями нижнего раствора) на базе конструкции параллелограмного механизма. Размеры захвата в вертикальной плоскости
Рисунок 3 - Трелевочная машина с пачковым захватом (челюстями нижнего раствора) на базе конструкции параллелограмного механизма. Размеры захвата в вертикальной плоскости
Рисунок 4. - Трелевочная машина с челюстями нижнего раствора. Вид сверху по рисунку 3 (захват не показан)
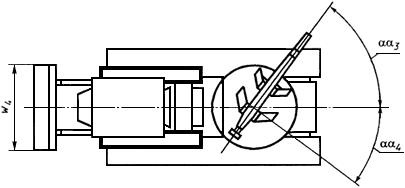
Рисунок 4 - Трелевочная машина с челюстями нижнего раствора. Вид сверху по рисунку 3 (захват не показан)
Рисунок 5. - Трелевочная машина с пачковым захватом (челюстями нижнего раствора) на базе конструкции арочного механизма. Размеры захвата и машины
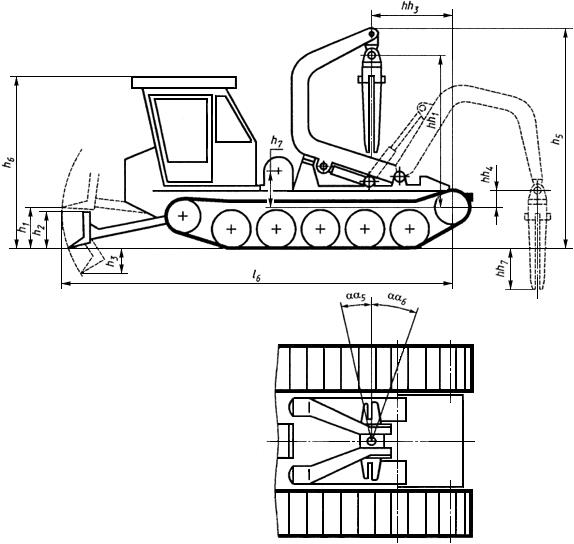
Рисунок 5 - Трелевочная машина с пачковым захватом (челюстями нижнего раствора) на базе конструкции арочного механизма. Размеры захвата и машины
Рисунок 6. - Трелевочная машина с пачковым захватом на базе промышленного шасси. Основные размеры в продольной вертикальной плоскости
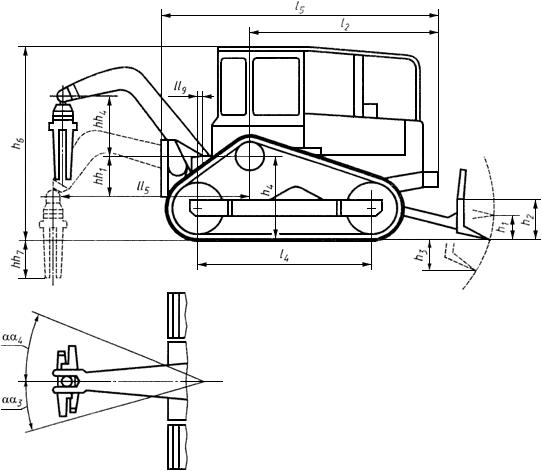
Рисунок 6 - Трелевочная машина с пачковым захватом на базе промышленного шасси. Основные размеры в продольной вертикальной плоскости
Рисунок 7. - Трелевочная машина с манипулятором. Размеры манипулятора
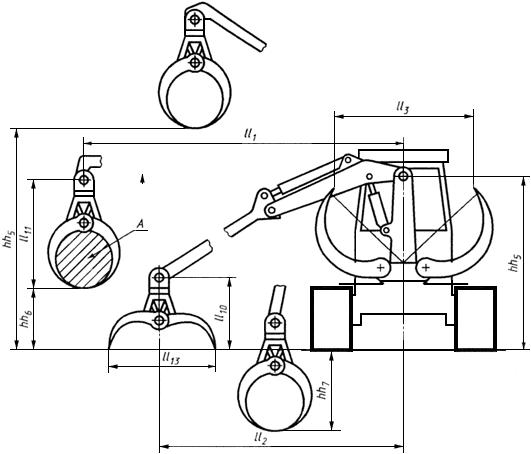
Рисунок 7 - Трелевочная машина с манипулятором. Размеры манипулятора
Рисунок 8. - Трелевочная машина с манипулятором и коником (челюстями верхнего раствора). Размеры в продольной вертикальной плоскости
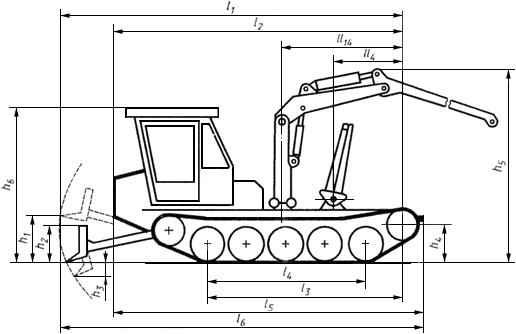
Рисунок 8 - Трелевочная машина с манипулятором и коником (челюстями верхнего раствора). Размеры в продольной вертикальной плоскости
Рисунок 9. - Трелевочная машина с манипулятором (манипулятор не показан). Вид спереди и вид сзади. Размеры коника и общие размеры
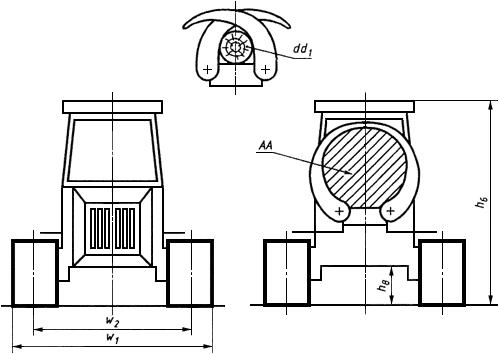
Рисунок 9 - Трелевочная машина с манипулятором (манипулятор не показан). Вид спереди и вид сзади. Размеры коника и общие размеры
Рисунок 10. - Трелевочная машина с манипулятором (коник не показан). Вид сверху
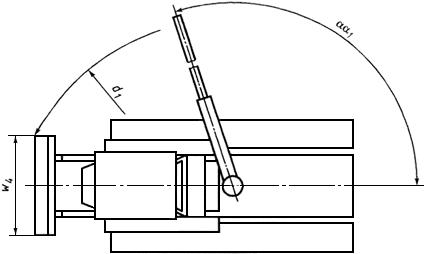
Рисунок 10 - Трелевочная машина с манипулятором (коник не показан). Вид сверху
Рисунок 11. - Размеры пачкового захвата в вертикальной поперечной плоскости машины
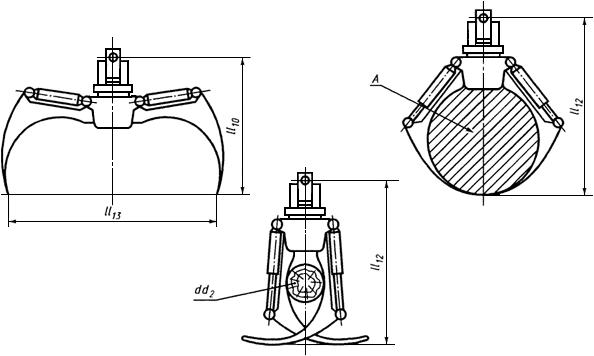
Рисунок 11 - Размеры пачкового захвата в вертикальной поперечной плоскости машины
При необходимости обозначения могут быть дополнены изготовителем.
2.1 Правая сторона, левая сторона машины - соответственно сторона машины справа и слева от оператора, находящегося в кабине лицом по направлению движения машины передним ходом.
2.2 Передняя, задняя части машины - соответственно часть машины спереди и сзади от оператора, находящегося в кабине лицом по направлению движения машины передним ходом.
2.3 Опорная плоскость отсчета ![]() - плоскость с ровной и твердой (бетонное основание и покрытие, не уступающее ему по твердости) поверхностью.
- плоскость с ровной и твердой (бетонное основание и покрытие, не уступающее ему по твердости) поверхностью.
2.4 Эксплуатационная масса машины - масса машины, полностью оснащенной (включая инструмент, принадлежности и запасные части), полностью заправленной топливом, маслами, смазками и специальными жидкостями, а также масса оператора 75 кг.
2.5 Наибольшая эксплуатационная масса - эксплуатационная масса машины по 2.4 с наибольшим дополнительным оборудованием в комплектации, указанной изготовителем.
2.6 Расстояние от оси ведущей звездочки до дуги траектории отвала толкателя ![]() - расстояние по горизонтали от оси ведущей звездочки (ведущего колеса) до вертикальной плоскости, касательной к дуге траектории, описываемой нижней кромкой отвала толкателя при его перемещении из крайнего верхнего положения
- расстояние по горизонтали от оси ведущей звездочки (ведущего колеса) до вертикальной плоскости, касательной к дуге траектории, описываемой нижней кромкой отвала толкателя при его перемещении из крайнего верхнего положения ![]() в крайнее нижнее положение
в крайнее нижнее положение ![]() (рисунки 1, 8).
(рисунки 1, 8).
2.7 Расстояние от оси ведущей звездочки до передней части машины ![]() - расстояние по горизонтали от оси ведущей звездочки (ведущего колеса) до вертикальной плоскости, проходящей через наиболее удаленную переднюю точку машины, отвал толкателя не учитывается (рисунки 1, 2, 6, 8).
- расстояние по горизонтали от оси ведущей звездочки (ведущего колеса) до вертикальной плоскости, проходящей через наиболее удаленную переднюю точку машины, отвал толкателя не учитывается (рисунки 1, 2, 6, 8).
2.8 Расстояние от оси ведущей звездочки до переднего опорного катка ![]() - расстояние по горизонтали от оси переднего катка до оси ведущей звездочки (рисунки 1, 3, 8).
- расстояние по горизонтали от оси переднего катка до оси ведущей звездочки (рисунки 1, 3, 8).
2.9 Гусеничная база ![]() - расстояние по горизонтали от оси переднего катка до оси заднего катка, когда обе оси расположены перпендикулярно к продольной вертикальной плоскости машины (рисунки 1, 2, 6, 8).
- расстояние по горизонтали от оси переднего катка до оси заднего катка, когда обе оси расположены перпендикулярно к продольной вертикальной плоскости машины (рисунки 1, 2, 6, 8).
2.10 Длина шасси ![]() - расстояние по горизонтали между вертикальными плоскостями, перпендикулярными к продольной вертикальной плоскости машины и проходящими через крайние точки передней и задней частей машины. Отвал толкателя, погрузочный щит и захват не учитываются. Предусматривается, что машина может содержать предохранительные щитки (бампер) и тяговые (прицепные) брусья (рисунки 1, 2, 4-8).
- расстояние по горизонтали между вертикальными плоскостями, перпендикулярными к продольной вертикальной плоскости машины и проходящими через крайние точки передней и задней частей машины. Отвал толкателя, погрузочный щит и захват не учитываются. Предусматривается, что машина может содержать предохранительные щитки (бампер) и тяговые (прицепные) брусья (рисунки 1, 2, 4-8).
2.11 Общая длина машины ![]() - расстояние по горизонтали между вертикальными плоскостями машины и проходящими через крайние переднюю и заднюю точки машины (при наличии отвала толкателя и его перемещении из верхнего положения в нижнее). При этом обе крайние вертикальные плоскости перпендикулярны к продольной плоскости машины, а манипулятор (в том числе с пачковым захватом) находится в транспортном положении (рисунки 1, 5, 8).
- расстояние по горизонтали между вертикальными плоскостями машины и проходящими через крайние переднюю и заднюю точки машины (при наличии отвала толкателя и его перемещении из верхнего положения в нижнее). При этом обе крайние вертикальные плоскости перпендикулярны к продольной плоскости машины, а манипулятор (в том числе с пачковым захватом) находится в транспортном положении (рисунки 1, 5, 8).
2.12 Высота подъема отвала толкателя ![]() - наибольшее расстояние по вертикали, на которое может быть поднята нижняя кромка отвала толкателя от
- наибольшее расстояние по вертикали, на которое может быть поднята нижняя кромка отвала толкателя от ![]() (рисунки 1, 2, 5, 6, 8).
(рисунки 1, 2, 5, 6, 8).
2.13 Высота отвала толкателя ![]() - расстояние по вертикали от нижней кромки отвала толкателя, установленного на
- расстояние по вертикали от нижней кромки отвала толкателя, установленного на ![]() , до верхней кромки отвала, исключая проушины и иные выступающие вверх части (рисунки 1, 5, 6, 8).
, до верхней кромки отвала, исключая проушины и иные выступающие вверх части (рисунки 1, 5, 6, 8).
2.14 Заглубление отвала толкателя ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() до нижней кромки отвала толкателя в самом нижнем его положении (рисунки 1, 2, 5, 6, 8).
до нижней кромки отвала толкателя в самом нижнем его положении (рисунки 1, 2, 5, 6, 8).
2.15 Наибольший вылет манипулятора ![]() - наибольшее расстояние по горизонтали от оси вращения манипулятора (в том числе с пачковым захватом) до вертикальной оси подвеса захвата (ротатора) (рисунок 7).
- наибольшее расстояние по горизонтали от оси вращения манипулятора (в том числе с пачковым захватом) до вертикальной оси подвеса захвата (ротатора) (рисунок 7).
2.16 Высота расположения оси ведущей звездочки (ведущего колеса) ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() до горизонтальной оси ведущей звездочки (ведущего колеса) (рисунки 1-3, 8).
до горизонтальной оси ведущей звездочки (ведущего колеса) (рисунки 1-3, 8).
2.17 Общая высота машины без груза ![]() - расстояние по вертикали между
- расстояние по вертикали между ![]() и горизонтальной плоскостью, проходящей через самую высокую точку машины при транспортном положении манипулятора (в том числе с пачковым захватом) (рисунки 5, 8).
и горизонтальной плоскостью, проходящей через самую высокую точку машины при транспортном положении манипулятора (в том числе с пачковым захватом) (рисунки 5, 8).
2.18 Высота машины по кабине оператора ![]() - расстояние по вертикали между
- расстояние по вертикали между ![]() и горизонтальной плоскостью, проходящей через самую высокую точку кабины оператора (рисунки 1, 2, 5, 6, 8, 9).
и горизонтальной плоскостью, проходящей через самую высокую точку кабины оператора (рисунки 1, 2, 5, 6, 8, 9).
2.19 Высота расположения лебедки ![]() - расстояние по вертикали между горизонтальной осью барабана лебедки и горизонтальной плоскостью, проходящей через оси ведущих звездочек (рисунки 1, 2, 5).
- расстояние по вертикали между горизонтальной осью барабана лебедки и горизонтальной плоскостью, проходящей через оси ведущих звездочек (рисунки 1, 2, 5).
2.20 Наибольший вылет манипулятора на опорной поверхности ![]() - наибольшее расстояние по горизонтали от оси вращения манипулятора (в том числе с пачковым захватом) до оси подвеса захвата (ротатора) при полностью раскрытых челюстях на
- наибольшее расстояние по горизонтали от оси вращения манипулятора (в том числе с пачковым захватом) до оси подвеса захвата (ротатора) при полностью раскрытых челюстях на ![]() (рисунок 7).
(рисунок 7).
2.21 Наибольшая площадь условного сечения коника ![]() - наибольшая площадь, ограниченная внутренним контуром захвата в положении с сомкнутыми концами челюстей (рисунок 9).
- наибольшая площадь, ограниченная внутренним контуром захвата в положении с сомкнутыми концами челюстей (рисунок 9).
2.22 Наибольшее раскрытие челюстей коника ![]() - расстояние по горизонтали между концами челюстей коника при их полном раскрытии (рисунок 7).
- расстояние по горизонтали между концами челюстей коника при их полном раскрытии (рисунок 7).
2.23 Ширина машины ![]() - расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости машины и проходящими через наиболее удаленные точки по обеим сторонам машины (рисунки 1, 2, 9).
- расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости машины и проходящими через наиболее удаленные точки по обеим сторонам машины (рисунки 1, 2, 9).
2.24 Колея ![]() - расстояние по горизонтали между двумя параллельными вертикальными плоскостями, проходящими через центральные плоскости гусеничных лент левого и правого бортов машины. Если колея сочлененных модулей машины различна, то определяется колея всех модулей.
- расстояние по горизонтали между двумя параллельными вертикальными плоскостями, проходящими через центральные плоскости гусеничных лент левого и правого бортов машины. Если колея сочлененных модулей машины различна, то определяется колея всех модулей.
2.25 Дорожный просвет ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() до наиболее низкой точки центральной части машины.
до наиболее низкой точки центральной части машины.
Ширина центральной части под днищем ограничивается расстоянием между внутренними выступающими частями машины (например, краями гусеничных лент, бортовых редукторов машины или рычагов балансиров), если это расстояние меньше половины размера колеи ![]() ; в ином случае ширина центральной части машины определяется как 25% размера колеи
; в ином случае ширина центральной части машины определяется как 25% размера колеи ![]() по обеим сторонам от центральной продольной вертикальной плоскости машины.
по обеим сторонам от центральной продольной вертикальной плоскости машины.
2.26 Наименьший диаметр удерживаемого в конике дерева (хлыста) ![]() - наименьший диаметр дерева (хлыста), которое может удерживаться в конике при полностью закрытых челюстях и движении машины на низшей скорости по волоку (рисунок 9).
- наименьший диаметр дерева (хлыста), которое может удерживаться в конике при полностью закрытых челюстях и движении машины на низшей скорости по волоку (рисунок 9).
2.27 Ширина погрузочного щита ![]() - расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости погрузочного щита и проходящими через наиболее удаленные боковые точки по обеим сторонам щита (рисунок 1).
- расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости погрузочного щита и проходящими через наиболее удаленные боковые точки по обеим сторонам щита (рисунок 1).
2.28 Угол поворота погрузочного манипулятора ![]() ,
, ![]() - наибольший угол поворота стрелы манипулятора в горизонтальной плоскости в каждую сторону от продольной вертикальной плоскости машины, измеряемый в градусах. Неограниченный угол поворота указывается особо. При неравных левом и правом повороте указывают оба значения (рисунок 10).
- наибольший угол поворота стрелы манипулятора в горизонтальной плоскости в каждую сторону от продольной вертикальной плоскости машины, измеряемый в градусах. Неограниченный угол поворота указывается особо. При неравных левом и правом повороте указывают оба значения (рисунок 10).
2.29 Габаритный диаметр поворота ![]() - диаметр наименьшего круга, который описывается наиболее удаленной от центра поворота точкой машины при ее повороте на
- диаметр наименьшего круга, который описывается наиболее удаленной от центра поворота точкой машины при ее повороте на ![]() (тормоза не задействованы, отвал толкателя находится в транспортном положении).
(тормоза не задействованы, отвал толкателя находится в транспортном положении).
2.30 Расстояние от оси ведущей звездочки до оси основания коника ![]() - расстояние по горизонтали от горизонтальной оси качания (установки шарнира) коника до оси ведущей звездочки (рисунок 8).
- расстояние по горизонтали от горизонтальной оси качания (установки шарнира) коника до оси ведущей звездочки (рисунок 8).
2.31 Ширина отвала толкателя ![]() - расстояние по горизонтали между двумя вертикальными плоскостями, параллельными вертикальной плоскости машины и проходящими через наружные боковые кромки отвала толкателя (рисунки 4, 10).
- расстояние по горизонтали между двумя вертикальными плоскостями, параллельными вертикальной плоскости машины и проходящими через наружные боковые кромки отвала толкателя (рисунки 4, 10).
2.32 Вылет оси подвеса пачкового захвата ![]() ,
, ![]() ,
, ![]() ,
, ![]() - расстояние по горизонтали от оси ведущей звездочки до оси подвеса захвата (ротатора) при следующих положениях захвата:
- расстояние по горизонтали от оси ведущей звездочки до оси подвеса захвата (ротатора) при следующих положениях захвата:![]() - в самом высоком и полностью выдвинутом;
- в самом высоком и полностью выдвинутом;![]() - в самом низком и полностью выдвинутом;
- в самом низком и полностью выдвинутом;![]() - в самом высоком и полностью втянутом;
- в самом высоком и полностью втянутом;![]() - в самом низком и полностью втянутом (рисунки 3, 5).
- в самом низком и полностью втянутом (рисунки 3, 5).
2.33 Высота расположения оси подвеса захвата ![]() ,
, ![]() ,
, ![]() ,
, ![]() - расстояние по вертикали от оси ведущей звездочки до горизонтальной оси стержня подвеса захвата (ротатора) при следующих положениях захвата:
- расстояние по вертикали от оси ведущей звездочки до горизонтальной оси стержня подвеса захвата (ротатора) при следующих положениях захвата:![]() - в самом высоком и полностью втянутом;
- в самом высоком и полностью втянутом;![]() - в самом высоком и полностью выдвинутом;
- в самом высоком и полностью выдвинутом;![]() - в самом низком и полностью втянутом;
- в самом низком и полностью втянутом;![]() - в самом низком и полностью выдвинутом положении (рисунки 3, 5, 6).
- в самом низком и полностью выдвинутом положении (рисунки 3, 5, 6).
2.34 Высота оси поворота стрелы погрузочного манипулятора ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() до горизонтальной оси поворота стрелы манипулятора в вертикальной плоскости (рисунок 7).
до горизонтальной оси поворота стрелы манипулятора в вертикальной плоскости (рисунок 7).
2.35 Углы поворота стрелы пачкового захвата ![]() и
и ![]() - наибольшие углы поворота стрелы или платформы пачкового захвата со стрелой в горизонтальной плоскости от продольной вертикальной плоскости машины, измеряемые в градусах. Указываются углы левого и правого поворота (рисунки 4, 6).
- наибольшие углы поворота стрелы или платформы пачкового захвата со стрелой в горизонтальной плоскости от продольной вертикальной плоскости машины, измеряемые в градусах. Указываются углы левого и правого поворота (рисунки 4, 6).
2.36 Расстояние от оси задних катков до оси качания стрелы с пачковым захватом ![]() - расстояние по горизонтали от вертикальной плоскости, проходящей через ось задних опорных катков до оси качания стрелы в вертикальной плоскости (рисунки 5, 6).
- расстояние по горизонтали от вертикальной плоскости, проходящей через ось задних опорных катков до оси качания стрелы в вертикальной плоскости (рисунки 5, 6).
2.37 Высота открытого захвата нижнего раствора ![]() - расстояние по вертикали от горизонтальной оси стержня подвеса захвата (ротатора) нижнего раствора челюстей (пачкового и манипулятора) до линии нижних точек челюстей на
- расстояние по вертикали от горизонтальной оси стержня подвеса захвата (ротатора) нижнего раствора челюстей (пачкового и манипулятора) до линии нижних точек челюстей на ![]() полностью раскрытом захвате (рисунки 7, 11).
полностью раскрытом захвате (рисунки 7, 11).
2.38 Высота закрытого захвата нижнего раствора ![]() - расстояние по вертикали от горизонтальной оси подвеса захвата (ротатора) нижнего раствора челюстей (манипулятора и пачкового захвата) до линии нижних точек захвата при сомкнутых челюстях.
- расстояние по вертикали от горизонтальной оси подвеса захвата (ротатора) нижнего раствора челюстей (манипулятора и пачкового захвата) до линии нижних точек захвата при сомкнутых челюстях.
2.39 Высота полностью закрытого захвата нижнего раствора ![]() - расстояние по вертикали от горизонтальной оси стержня подвеса захвата (ротатора) нижнего раствора челюстей до линии касания челюстями
- расстояние по вертикали от горизонтальной оси стержня подвеса захвата (ротатора) нижнего раствора челюстей до линии касания челюстями ![]() при полностью закрытом захвате (рисунок 11).
при полностью закрытом захвате (рисунок 11).
2.40 Наибольшее раскрытие захвата ![]() - расстояние по горизонтали между концами челюстей захвата при их полном раскрытии на
- расстояние по горизонтали между концами челюстей захвата при их полном раскрытии на ![]() (рисунки 7, 11).
(рисунки 7, 11).
2.41 Наибольшая площадь условного сечения захвата ![]() - площадь, ограниченная внутренним контуром захвата в положении с сомкнутыми концами челюстей.
- площадь, ограниченная внутренним контуром захвата в положении с сомкнутыми концами челюстей.
2.42 Наименьший диаметр удерживаемого в захвате поваленного дерева (хлыста) ![]() - наименьший диаметр поваленного дерева (хлыста), которое может удерживаться захватом манипулятора при полностью закрытых челюстях (рисунок 11).
- наименьший диаметр поваленного дерева (хлыста), которое может удерживаться захватом манипулятора при полностью закрытых челюстях (рисунок 11).
2.43 Высота подъема захвата манипулятора ![]() - наибольшее расстояние по вертикали от
- наибольшее расстояние по вертикали от ![]() до нижней точки захвата при сомкнутых челюстях и при заданном радиусе поворота манипулятора в горизонтальной плоскости (в том числе с пачковым захватом) (рисунок 7).
до нижней точки захвата при сомкнутых челюстях и при заданном радиусе поворота манипулятора в горизонтальной плоскости (в том числе с пачковым захватом) (рисунок 7).
2.44 Высота подъема захвата манипулятора при наибольшем вылете ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() нижней точки захвата при сомкнутых челюстях и наибольшем горизонтальном вылете манипулятора (в том числе с пачковым захватом).
нижней точки захвата при сомкнутых челюстях и наибольшем горизонтальном вылете манипулятора (в том числе с пачковым захватом).
2.45 Заглубление захвата манипулятора (пачкового захвата и погрузочного щита) ![]() - расстояние по вертикали от
- расстояние по вертикали от ![]() до нижней точки полностью опущенного вниз погрузочного щита или захвата при сомкнутых челюстях и заданном радиусе от оси поворота манипулятора (или погрузочного щита) (рисунки 1, 3, 5-7).
до нижней точки полностью опущенного вниз погрузочного щита или захвата при сомкнутых челюстях и заданном радиусе от оси поворота манипулятора (или погрузочного щита) (рисунки 1, 3, 5-7).
2.46 Угол поворота захвата манипулятора ![]() и
и ![]() - наибольший угол поворота захвата вокруг его вертикальной оси от исходного положения (когда плоскость челюстей захвата перпендикулярна к продольной вертикальной плоскости машины). При неравных левом и правом поворотах указывают оба значения (рисунок 5).
- наибольший угол поворота захвата вокруг его вертикальной оси от исходного положения (когда плоскость челюстей захвата перпендикулярна к продольной вертикальной плоскости машины). При неравных левом и правом поворотах указывают оба значения (рисунок 5).
2.47 Расстояние от оси ведущей звездочки до оси колонны погрузочного манипулятора ![]() - расстояние по горизонтали от оси ведущей звездочки до вертикальной оси вращения погрузочного манипулятора (рисунок 8).
- расстояние по горизонтали от оси ведущей звездочки до вертикальной оси вращения погрузочного манипулятора (рисунок 8).
2.48 Расстояние между внутренними кромками гусениц ![]() - расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости симметрии машины и проходящими через внутренние кромки гусениц (рисунки 2, 9).
- расстояние по горизонтали между двумя вертикальными плоскостями, параллельными продольной плоскости симметрии машины и проходящими через внутренние кромки гусениц (рисунки 2, 9).
2.49 Расстояние от оси направляющего колеса до оси колонны погрузочного манипулятора ![]() - расстояние по горизонтали от оси вращения погрузочного манипулятора (рисунок 9).
- расстояние по горизонтали от оси вращения погрузочного манипулятора (рисунок 9).
Электронный текст документа
и сверен по:
официальное издание
М.: ИПК Издательство стандартов, 2003
