ГОСТ ISO 8082-1-2017
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины для леса самоходные
УСТРОЙСТВА ЗАЩИТЫ ПРИ ОПРОКИДЫВАНИИ
Технические требования и методы испытаний
Часть 1
Машины общего назначения
Self-propelled machinery for forestry. Roll-over protective structures. Technical requirements and test methods. Part 1. General machines
МКС 65.060.80
Дата введения 2019-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Ассоциацией "Рослесмаш" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 25 сентября 2017 г. N 103-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 30 ноября 2017 г. N 1863-ст межгосударственный стандарт ГОСТ ISO 8082-1-2017 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2019 г.
5 Настоящий стандарт идентичен международному стандарту ISO 8082-1:2009* "Машины для леса самоходные. Лабораторные испытания устройств защиты при опрокидывании и эксплуатационные требования к ним. Часть 1. Машины общего назначения" ("Self-propelled machinery for forestry - Laboratory tests and performance requirements for roll-over protective structures - Part 1: General machines", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ISO 8082-1 разработан Техническим комитетом по стандартизации ISO ТС 23 "Тракторы и машины для сельского и лесного хозяйства", Подкомитетом SC 15 "Машины для лесного хозяйства" Международной организации по стандартизации (ISO). Стандарт был рассмотрен и подтвержден в 2015 г.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 В настоящем стандарте возможно наличие некоторых элементов, которые могут быть предметом патентных прав. ISO, а также МГС не несут ответственности за выявление части или всех таких прав.
7 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты" (по состоянию на 1 января текущего года), а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает последовательный и воспроизводимый метод измерения характеристик "сила - деформация" устройства защиты при опрокидывании самоходных машин для леса при статическом нагружении и технические требования к типовому образцу при таком нагружении. Стандарт распространяется на погрузочно-транспортирующие (форвардеры), трелевочные, валочно-пакетирующие, сучкорезно-раскряжевочные (процессоры), валочно-сучкорезно-раскряжевочные (харвестеры) машины и лесопогрузчики по ISO 6814.
Стандарт не распространяется на машины с кабиной и стрелой на поворотной платформе, которые рассмотрены во второй части стандарта ISO 8082-2.
Примечание - Уровни требований и процедуры испытаний в первой части стандарта ISO 8082-1 такие же, как в стандарте ISO 3471 [2].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты*:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 148-1 Metallic materials - Charpy pendulum impact test - Part 1: Test method (Материалы металлические. Испытания на удар по Шарпи на маятниковом копре. Часть 1. Метод испытания)
ISO 898-1 Mechanical properties of fasteners made of carbon steel and alloy steel - Part 1: Bolts, screws and studs with specified property classes - Coarse thread and fine pitch thread (Механические свойства крепежных изделий из углеродистой и легированной стали. Часть 1. Болты, винты и шпильки с заданным классом прочности. Крупная и мелкая резьба)
ISO 898-2:1992 Mechanical properties of fasteners - Part 2: nuts with specified proof load values; coarse thread (Изделия крепежные. Механические свойства. Часть 2. Гайки с установленными значениями контрольной нагрузки. Крупная резьба)
Примечание - Для однозначного соблюдения требований настоящего стандарта, выраженного в датированной ссылке, рекомендуется использовать только указанное в этой ссылке издание.
ISO 3164 Laboratory evaluations of protective structures - Specifications for deflection-limiting volume (Машины землеройные. Лабораторные испытания по оценке устройств защиты. Требования к пространству, ограничивающему деформацию)
ISO 6814 (Machinery for forestry - Mobile and selfpropelled machinery - Terms, definitions and classification (Машины для лесного хозяйства. Мобильные и самоходные машины. Термины, определения и классификация)
3 Термины, определения и обозначения
В настоящем стандарте применяются следующие термины, определения и обозначения (см. таблицу 1).
3.1 устройство защиты при опрокидывании ROPS (roll-over protective structure): Система конструктивных элементов, позволяющая при опрокидывании машины уменьшить вероятность нанесения повреждения оператору, пристегнутому ремнем безопасности.
Примечание - Эти конструктивные элементы включают подрамники, кронштейны, опоры, подвески или амортизаторы, болты и шпильки, используемые для крепления устройства защиты при опрокидывании к раме машины, но исключают все, что является ее неотъемлемой частью.
3.2 объем ограничения деформации DLV (deflection-limiting volume): Фигура с прямоугольными очертаниями, по размерам приблизительно соответствующая антропометрическим данным оператора (мужчина высокого роста в положении сидя в обычной одежде и защитном шлеме по [1]), определяющая предельно допустимую деформацию.
3.3 устройство защиты от падающих предметов FOPS (falling-object protective structure): Система конструктивных элементов, расположенных так, чтобы обеспечить защиту оператора от падающих предметов (например, деревьев, камней).
3.4 устройство защиты оператора OPS (operator protective structure): Система конструктивных элементов, расположенных так, чтобы обеспечить защиту оператора от проникающих предметов (например, от подроста, ветвей деревьев, обрывков каната лебедки).
3.5 имитируемая наземная плоскость SGP (simulated ground plane): Плоская поверхность, на которой, как предполагается, остается лежать машина после опрокидывания.
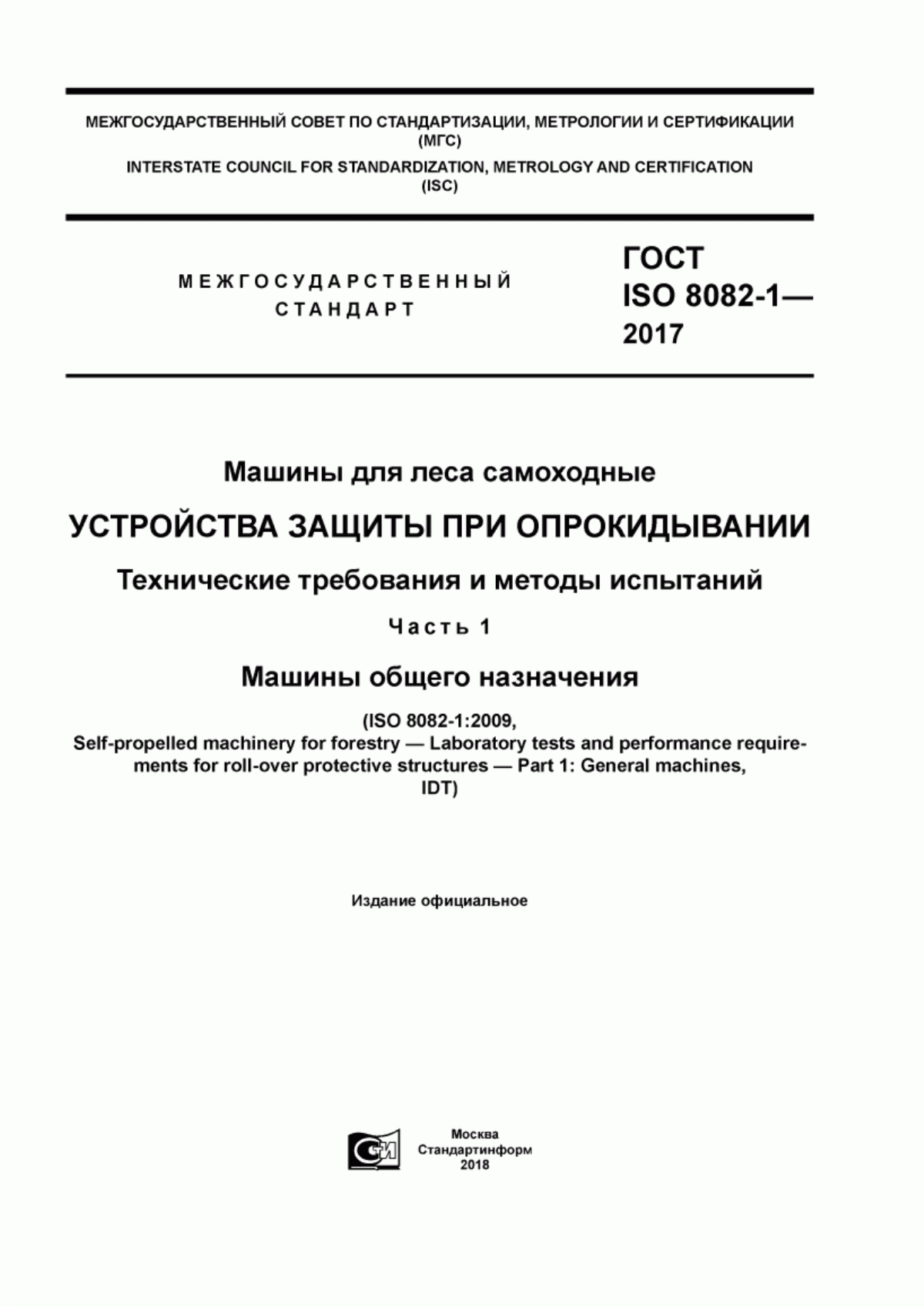
3.5.1 боковая имитируемая наземная плоскость LSGP (lateral simulated ground plane): Плоскость, повернутая на угол 15° в сторону удаления от DLV (для машины, опрокинувшейся на бок), образующаяся при повороте вертикальной плоскости, параллельной продольной оси машины, относительно горизонтальной оси, проходящей через наиболее удаленную точку верхнего элемента ROPS (рисунок 1).
Примечание - LSGP определяется для ненагруженного ROPS и перемещается вместе с элементом, к которому приложена нагрузка, сохраняя угол 15° относительно вертикали.
3.5.2 вертикальная имитируемая наземная плоскость VSGP (vertical simulated ground plane): Плоскость (для машины, оказавшейся после переворота в положении "вверх колесами"), определяемая контактом с верхней частью поперечины ROPS (находящейся в контакте с грунтом) и передней или задней частью машины, обеспечивающей опору для перевернутой машины.
Примечание - VSGP перемещается вместе с деформацией ROPS.
3.6 масса машины m (machine mass): Заявленная изготовителем максимальная масса машины, включая закрепленное технологическое оборудование, инструменты, устройство защиты оператора (ROPS), заправленные емкости, но, исключая прицепное оборудование (например, рубительные машины, сеялки, дисковые бороны) и любой груз, который можно было бы перевезти на машине.
Таблица 1 - Обозначения
Обозначения | Описание обозначений | Единицы измерения |
U | Энергия, поглощаемая ROPS, зависящая от массы машины | Дж |
F | Сила | Н |
m | Масса машины | кг |
Деформация ROPS | мм |
|
1 - верхний элемент ROPS, к которому прикладывают боковую нагрузку; 2 - наиболее удаленная точка элемента 1 от вертикальной продольной плоскости; 3 - вертикальная плоскость, параллельная продольной оси машины, проходящая через линию 4; 4 - вертикальная линия, проходящая через точку 2; 5 - боковая имитируемая наземная плоскость
Рисунок 1 - Определение положения боковой имитируемой наземной плоскости
4 Статические лабораторные испытания
Предупреждение: Некоторые испытания по настоящему стандарту предполагают использование методов, которые могут привести к возникновению опасных ситуаций.
4.1 Крепление
Необходимо обеспечивать надежное крепление системы "ROPS - рама машины" к раме стенда при приложении боковых, продольных и вертикальных нагрузок.
DLV и его расположение должны соответствовать ISO 3164. DLV должно быть жестко зафиксировано в месте машины, где расположено сиденье оператора, и должно находиться там в течение всего времени испытаний. Для машин, оборудованных реверсивным сиденьем, DLV определяется как сумма DLV для двух положений сиденья.
4.2 Средства измерений
Испытательный стенд должен быть оборудован средствами измерения усилий, прикладываемых к ROPS, и деформации устройства. Требования к точности средств измерений указаны в таблице 2.
Таблица 2 - Требования к точности средств измерений
Измеряемые величины | Относительная погрешность измерений |
Деформация ROPS, мм | ±5% максимального значения деформации |
Усилие, приложенное к ROPS, Н | ±5% максимального значения измеренной силы |
4.3 Оборудование
4.3.1 Общие положения
4.3.1.1 Установка ROPS на раму машины
ROPS должно быть установлено на раму или на корпус машины так же, как на работающую машину. Для испытаний вся машина в сборе не требуется, однако установка ROPS на раме или на корпусе машины должна полностью соответствовать эксплуатационной установке. Все штатные съемные окна, двери, панели и другие элементы, не являющиеся несущими, должны быть удалены, чтобы не влиять на результаты испытаний.
4.3.1.2 Крепление системы "ROPS - рама машины" к опорной плите стенда
Систему "ROPS - рама машины" следует крепить к опорной плите стенда так, чтобы элементы крепления этой системы к опорной плите стенда имели минимальную деформацию в процессе испытаний. При боковом нагружении система "ROPS - рама машины" не должна иметь никакой опоры на плиту стенда, кроме первоначального крепления.
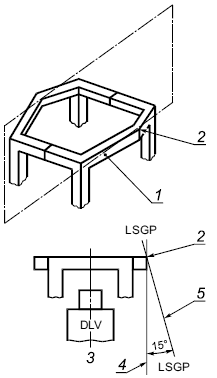
Необходимо соединять опорную плиту стенда с рамой машины в местах крепления к раме передней и задней осей машины. Для шарнирно-сочлененных машин, если при испытаниях используют обе полурамы, шарнир должен быть заблокирован так, чтобы полурамы были на одной прямой линии. Если при испытаниях используется только рама с установленным ROPS, то ее крепят к опорной плите по габаритным точкам рамы (рисунок 2).
4.3.1.3 Устранение влияния элементов подвески
Систему устанавливают так, чтобы любой элемент машины, рассматриваемый как подвеска (включающий газовые, газомасляные, резиновые или механические упругие элементы), должен быть фактически устранен (заблокирован) как поглощающий энергию. Однако структурные элементы ROPS могут включать подвеску или гибкие амортизаторы, которые не должны быть заблокированы.
|
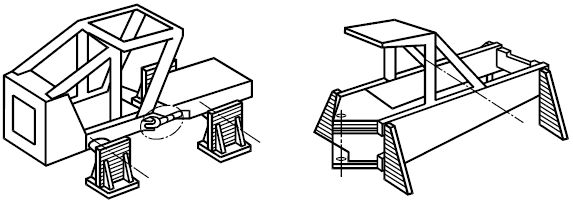
Рисунок 2 - Крепление рамы машины к опорной плите стенда
4.3.2 Крепление при вертикальной нагрузке
Для вертикальной нагрузки нет каких-либо ограничений на крепление и опору системы "ROPS - рама машины" за исключением того, что никакого ремонта или исправления деформаций крепления не производят.
4.4 Методы испытаний
4.4.1 Общие положения
Методы испытаний должны состоять из действий, определенных в 4.4.2 (боковая нагрузка), 4.4.3 (вертикальная нагрузка) и 4.4.4 (продольная нагрузка), выполненных в таком же порядке. Никакой ремонт или исправления любого элемента "ROPS - рама машины" не должны производиться во время испытаний или между боковой, вертикальной и продольной нагрузками.
Примечание - Приведенные в качестве иллюстраций рисунки не ограничивают конструкцию нагружающих устройств.
4.4.2 Испытания при боковой нагрузке
4.4.2.1 Для измерения характеристик "сила - деформация" боковая нагрузка прикладывается к верхнему основному продольному элементу ROPS.
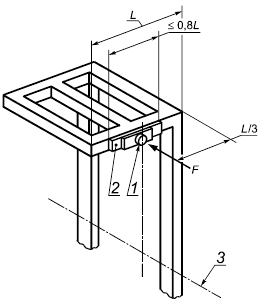
4.4.2.2 Для ROPS, имеющего более двух стоек, боковую нагрузку следует прикладывать через устройство ее распределения, имеющее длину не более 80% горизонтального расстояния L между передней и задней стойками ROPS (рисунок 3). При криволинейных структурных элементах, устройство распределения нагрузки может быть прикреплено к ROPS, но не должно оказывать влияния на его прочность.
4.4.2.3 Для конструкции ROPS с одной или двумя стойками расположение точки приложения нагрузки зависит от длины L и расположения вертикальных проекций передней и задней плоскостей DLV. Точка приложения нагрузки должна быть расположена относительно стойки ROPS не ближе, чем L/3. Если эта точка оказывается между вертикальной проекцией DLV и стойкой ROPS, то она должна быть смещена от стойки в пределы вертикальной проекции DLV (рисунок 4).
4.4.2.4 Первоначальное направление нагрузки должно быть горизонтальным и перпендикулярным к вертикальной плоскости, проходящей через продольную ось машины. При дальнейшем действии нагрузки допускается изменение ее направления, связанное с деформацией конструкции "ROPS - рама машины".
|
1 - упор со сферическим углублением; 2 - распределитель нагрузки
Примечание 1 - Распределитель нагрузки и упор со сферическим углублением должны удерживать конец нагрузочного устройства и предотвращать его местное проникновение.
Примечание 2 - Типичное, но не обязательное расположение.
Рисунок 3 - Устройство распределения нагрузки для ROPS с четырьмя стойками
|
1 - упор со сферическим углублением; 2 - распределитель нагрузки; 3 - оси расположения DLV
Рисунок 4 - Устройство распределения нагрузки для ROPS с двумя стойками
4.4.2.5 Если сиденье оператора смещено относительно продольной оси машины, то нагрузку следует прилагать к наиболее близкой к нему стороне ROPS. Если сиденье оператора расположено на продольной оси машины, а деформации конструкции ROPS при нагружении с левой и с правой сторон будут различными, то выбор стороны нагружения должен соответствовать наиболее тяжелым условиям работы системы "ROPS - рама машина".
4.4.2.6 Чтобы нагружение считалось статическим, его скорость должна быть менее 5 мм/с. В процессе нагружения значения усилий и соответствующих им деформаций с интервалом не более 15 мм должны быть измерены, отложены на графике "деформация - усилие" и записаны. Нагружение продолжают до тех пор, пока не будут достигнуты требуемые значения усилия и энергии. Площадь на графике "деформация - усилие" между кривой усилий и осью абсцисс (рисунок 5) характеризует поглощенную энергию.
|
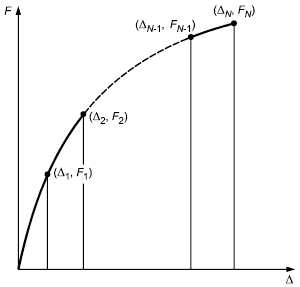
- сила;
- деформация;
- число выполненных измерений
Примечание - Размерность величин в формуле для расчета поглощаемой энергии: сила в ньютонах, деформация
в метрах, поглощаемая энергия
в джоулях.
Рисунок 5 - График "деформация - усилие" при боковом нагружении
Значения деформаций, используемые при вычислениях энергии, должны быть деформациями ROPS по линии действия силы. Никакие деформации элементов нагрузочного устройства не должны учитываться при измерении деформаций, используемых при вычислениях энергии () по формуле
![]() .
.
4.4.3 Испытания при вертикальной нагрузке
4.4.3.1 После снятия боковой нагрузки к верхней части ROPS прикладывается вертикальная нагрузка с помощью балки шириной 250 мм (рисунок 6).
4.4.3.2 Для ROPS с двумя и более стойками вертикальная нагрузка должна прикладываться в той же плоскости, что и боковая нагрузка.
4.4.3.3 Для машин с реверсивным сиденьем нагрузка должна прикладываться посередине между двумя положениями контрольной точки сиденья.
|
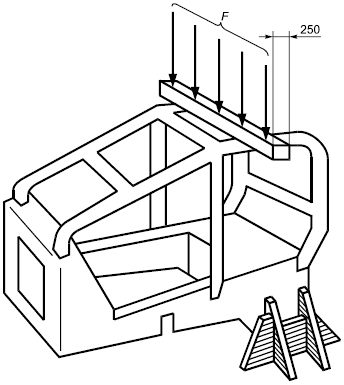
Рисунок 6 - Вертикальная нагрузка и распределитель нагрузки
4.4.4 Испытания при продольной нагрузке
4.4.4.1 После снятия вертикальной нагрузки продольная нагрузка должна прикладываться к верхнему структурному элементу ROPS по продольной центральной оси ROPS. Продольная нагрузка прикладывается, как правило, к деформированному устройству ROPS, поскольку боковое и вертикальное нагружения, вероятно, закончатся с остаточными деформациями. Первоначальное положение точки приложения продольной нагрузки определяется заранее положением распределителя нагрузки и места приложения нагрузки до начала проведения всех испытаний.
4.4.4.2 Распределитель нагрузки может прикладываться на всю ширину ROPS при отсутствии задних или передних поперечных элементов. Во всех других случаях ширина распределителя нагрузки; не должна превышать 80% ширины ROPS W (рисунок 7). Используемый распределитель нагрузки не должен влиять на прочность ROPS с прямыми или изогнутыми элементами.
4.4.4.3 Выбор направления действия нагрузки (спереди или сзади) должен соответствовать наиболее опасным условиям для системы "ROPS - рама машины". Первоначальное направление нагрузки должно быть горизонтальным и параллельным исходной продольной оси машины. Некоторые дополнительные факторы для выбора направления продольной нагрузки:
a) расположение ROPS относительно DLV и возможное нарушение защиты оператора в результате продольной деформации;
b) особенности конструкции машины (например, элементы конструкции, которые могут препятствовать продольной деформации ROPS), ограничивающие выбор направления продольной нагрузки;
c) предварительный опыт, указывающий на возможность продольного опрокидывания или на тенденцию определенного вида машин к частичному повороту относительно их продольной оси при вращении в процессе опрокидывания.
|
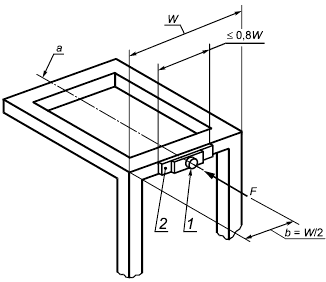
1 - упор со сферическим углублением; 2 - распределитель нагрузки; a - ось, параллельная продольной оси машины; b - расстояние от торца верхнего структурного элемента ROPS до оси приложения продольной нагрузки
Примечание 1 - Распределитель нагрузки и упор со сферическим углублением должны предотвращать местное проникновение и удерживать конец нагрузочного устройства.
Примечание 2 - Типичное, но не обязательное расположение.
Рисунок 7 - Продольная нагрузка
4.4.4.4 Скорость деформации должна быть такой, чтобы нагрузку считать статической (см. 4.4.2.6). Нагружение должно продолжаться до тех пор, пока усилие не достигнет требуемой величины.
5 Технические требования
5.1 Общие положения
В процессе каждого из испытаний ни один элемент ROPS не должен входить в DLV оператора (см. ISO 3164). Для машин с реверсивным сиденьем нагрузка должна прикладываться в середине между двумя контрольными точками сиденья. Деформация ROPS не должна позволять имитируемой наземной плоскости войти в зону DLV.
5.2 Требования к усилию и энергии при нагружении
5.2.1 Значения усилий и энергии должны определяться допустимыми деформациями элементов ROPS в соответствие с объемом ограничения деформации по ISO 3164. Требования к усилию и энергии связаны с массой машины m.
5.2.2 Усилие при боковом нагружении должно быть не менее, чем определено в таблице 3 для указанных типов машин.
Одновременность достижения требуемых значений усилия и энергии не обязательна. Если усилие достигнет или превысит требуемое значение раньше, чем значение энергии, то оно может быть уменьшено, однако должно быть снова увеличено до необходимого уровня для достижения требуемого значения энергии.
Таблица 3 - Минимальное усилие при боковом нагружении
Тип машины | Усилие |
Машины для леса колесные* |
|
Машины для леса гусеничные |
|
* Включая машины, на которых по требованию заказчика на резиновые шины могут устанавливаться металлические гусеницы как дополнительное оборудование. | |
5.2.3 Минимальные значения поглощаемой энергии при боковом нагружении должны быть не менее значений, установленных в таблице 4 для указанных типов машин.
Таблица 4 - Минимальная поглощаемая энергия при боковом нагружении
Тип машины | Энергия |
Машины для леса колесные* |
|
Машины для леса гусеничные |
|
* Включая машины, на которых по требованию заказчика на резиновые шины могут устанавливаться металлические гусеницы как дополнительное оборудование. | |
5.2.4 После снятия боковой нагрузки система "ROPS - рама машины" должна выдержать вертикальную нагрузку, численно равную в ньютонах 20m, в течение 5 мин или до прекращения любой деформации, в зависимости от того, что наступит раньше.
5.2.5 Усилие при продольном нагружении должно быть не менее, чем определено в таблице 5 для указанных типов машин.
Таблица 5 - Минимальное усилие при продольном нагружении
Тип машины | Усилие |
Машины для леса колесные* |
|
Машины для леса гусеничные |
|
* Включая машины, на которых по требованию заказчика на резиновые шины могут устанавливаться металлические гусеницы как дополнительное оборудование. | |
5.3 Требования к температуре и материалам
5.3.1 Общие требования
Испытания конструкции ROPS и элементов рамы машины должны проводиться при их температуре минус 18°С или ниже. Если испытания не выполнены при этой температуре, то требования к материалам должны соответствовать 5.3.2 и 5.3.3.
5.3.2 Болты и гайки
Болты и гайки, используемые для крепления ROPS к раме машины и для соединения структурных частей ROPS, должны иметь класс прочности:
- болты - класс прочности 8.8, 9.8 или 10.9 (см. ISO 898-1);
- гайки - класс прочности 8, 9 или 10 (см. ISO 898-2).
5.3.3 Прочность на удар
Конструктивные элементы ROPS и их крепления к раме машины должны быть изготовлены из сталей, имеющих минимальную ударную вязкость при испытаниях образцов с V-образным надрезом по методу Шарпи в соответствии с таблицей 6.
Образцы должны быть "продольными" и взяты из полосового, трубчатого или фасонного проката до его формирования или сварки для использования в конструкции ROPS. Образцы из трубчатого или фасонного проката должны быть взяты из середины наибольшей стороны и не включать сварных швов (ISO 148-1).
Таблица 6 - Минимальная ударная вязкость по методу Шарпи для образцов с V-образным надрезом
Размер образца, мм | Поглощаемая энергия, Дж, при температуре, °С** | |
-30°С | -20°С | |
10 | 11 | 27,5 |
10 | 10 | 25 |
10 | 9,5 | 24 |
10 | 9,5 | 24 |
10 | 9 | 22,5 |
10 | 8,5 | 21 |
10 | 8 | 20 |
10 | 7,5 | 19 |
10 | 7 | 17,5 |
10 | 6 | 15 |
10 | 6 | 15 |
* Предпочтительный размер образца должен быть не меньше, чем максимальный размер, который позволяет материал. ** Величина требуемой энергии разрушения при температуре -20°С в 2,5 раза больше, чем при температуре -30°С. Другие факторы, влияющие на величину энергии разрушения - направление прокатки, ориентация волокна и сварка, - рассматриваются при выборе и использовании стали. | ||
6 Протокол испытаний
Протокол испытаний должен содержать результаты испытаний, оформленные в соответствии с приложением А.
Приложение А
(обязательное)
Протокол испытаний по ГОСТ ISO 8082-1
Идентификация машины
Тип | ||||||||
Изготовитель | ||||||||
Модель | ||||||||
Номер рамы | ||||||||
Колесная/гусеничная машина | ||||||||
Идентификация ROPS
Изготовитель | |||||||
Модель | |||||||
Серийный номер | |||||||
Номера частей ROPS | |||||||
Информация, представляемая изготовителем
Масса машины, кг | |||||
Расположение DLV | |||||
Критерии
Боковая нагрузка, Н | |||||||
Энергия при боковом нагружении, Дж | |||||||
Вертикальная нагрузка, Н | |||||||
Продольная нагрузка, Н | |||||||
Результаты испытаний
Следующие значения усилий и энергии были достигнуты или превышены без проникновения структурных элементов ROPS или имитируемых наземных плоскостей (где применимо) в DLV.
Боковая нагрузка
Сила, полученная после достижения или превышения требуемого значения энергии, Н | ||||
Достигнутая поглощенная энергия, Дж | ||||
Вертикальная нагрузка
Достигнутое усилие, Н | ||||
Продольная нагрузка
Достигнутое усилие, Н | ||||
Температура и материалы
Испытание проведено с ROPS и рамой машины, выдержанных при температуре, °С | |||
Если температура при испытаниях выше минус 18°С, то должно быть выполнено следующее:
Требования прочности на удар по методу Шарпи для образцов с V-образным надрезом конструктивных металлических элементов ROPS проверены на образцах с размерами, мм | |||
Поглощенная энергия, Дж | |||
Класс прочности гаек | |||
Класс прочности болтов | |||
Аттестация
Минимальные требования ГОСТ ISO 8082-1 выполнены при испытаниях на машине с | ||||||
максимальной массой | кг, включая следующее закрепленное оборудование и инструменты: | |||||
Дата испытаний | ||||||
Наименование и адрес испытательной организации | ||||||
Инженер-испытатель | ||||||
Дата/номер протокола испытаний | ||||||
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 148-1:2016 | * | |
ISO 898-1:2013 | IDT | ГОСТ ISO 898-1-2014 "Механические свойства крепежных изделий из углеродистых и легированных сталей. Часть 1. Болты, винты и шпильки установленных классов прочности с крупным и мелким шагом резьбы" |
ISO 898-2:1992 | IDT | ГОСТ ISO 898-2-2015 "Механические свойства крепежных изделий из углеродистых и легированных сталей. Часть 2. Гайки установленных классов прочности с крупным и мелким шагом резьбы" |
ISO 3164: 2013 | IDT | ГОСТ ISO 3164-2016 "Машины землеройные. Лабораторные испытания по оценке устройств защиты. Требования к пространству, ограничивающему деформацию" |
ISO 6814:2009 | * | |
* Соответствующий межгосударственный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | ISO 3411 | Earth-moving machinery - Physical dimensions of operators and minimum operator space envelope (Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора) |
[2] | ISO 3471 | Earth-moving machinery - Roll-over protective structures - Laboratory tests and performance requirements (Машины землеройные. Устройства защиты при опрокидывании. Технические требования и лабораторные испытания) |
[3] | ISO 8083 | Machinery for forestry - Falling-object protective structures (FOPS) - Laboratory tests and performance requirements (Машины для леса. Устройства защиты от падающих предметов. Лабораторные испытания и требования к характеристикам) |
[4] | ISO 8084 | Machinery for forestry - Operator protective structures - Laboratory tests and performance requirements (Машины для леса. Устройства защиты оператора. Лабораторные испытания и требования к характеристикам) |
УДК 630.377.4:658.382.3:006.354 | МКС 65.060.80 | IDT |
Ключевые слова: машины для леса самоходные, защита при опрокидывании (ROPS), технические требования, методы испытаний | ||
Электронный текст документа
и сверен по:
, 2018
