ГОСТ EN 894-3-2012
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Безопасность машин
ЭРГОНОМИЧЕСКИЕ ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ ИНДИКАТОРОВ И ОРГАНОВ УПРАВЛЕНИЯ
Часть 3
Органы управления
Safety of machinery. Ergonomics requirements for the design of displays and control actuators. Part 3. Control actuators
МКС 13.100;
13.180
Дата введения 2014-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 70 "Станки"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 3 декабря 2012 г. N 54-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 6 сентября 2013 г. N 921-ст межгосударственный стандарт ГОСТ EN 894-3-2012 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2014 г.
5 Настоящий стандарт идентичен европейскому стандарту EN 894-3:2000+A1:2008* Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 3: Control actuators (Безопасность машин. Эргономические требования к оформлению индикаторов и органов управления. Часть 3. Органы управления).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Европейский стандарт разработан CEN/TC 122 "Эргономика".
Европейский стандарт, на основе которого подготовлен настоящий стандарт, реализует существенные требования безопасности директив ЕС, приведенных в приложениях ZA, ZB.
Перевод с английского языка (en).
Официальные экземпляры европейского стандарта, на основе которого подготовлен настоящий межгосударственный стандарт, и стандартов, на которые даны ссылки, имеются в Госстандарте Республики Беларусь.
Сведения о соответствии межгосударственных стандартов ссылочным европейским стандартам приведены в дополнительном приложении ДА.
Степень соответствия - идентичная (IDT)
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Настоящий стандарт разработан в качестве гармонизированного стандарта, целью которого является достижение соответствия основным требованиям по безопасности директивы ЕС, касающейся машин и связанных с ней рекомендаций ассоциации ЕАСТ (Европейская ассоциация свободной торговли)
1 Область применения
В настоящем стандарте содержатся рекомендации по выбору, проектированию, установке и расположению органов управления. Данные органы должны способствовать выполнению оператором своих обязанностей, а также должны соответствовать условиям эксплуатации и отвечать всем предъявляемым к ним требованиям.
Настоящий стандарт может быть применен к ручным органам управления, устанавливаемым на технологическое оборудование, используемое в промышленных и частных целях. Особое внимание на рекомендации данного стандарта необходимо обратить в том случае, если использование органа управления может прямо или косвенно (при его неверном использовании) привести к получению травмы или нанесению вреда здоровью.
2 Нормативные ссылки
Для применения настоящего стандарта необходимы следующие ссылочные стандарты*. Для недатированных ссылок применяют последнее издание ссылочного стандарта (включая все его изменения).
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
EN 574:1996+А1:2008 Safety of machinery - Two-hand control devices - Functional aspects - Principles for design (Безопасность машин. Двуручные устройства управления. Функциональные аспекты. Принципы конструирования)
EN 614-1:2006+А1:2008 Safety of machinery - Ergonomic design principles - Part 1: Terminology and general principles (Безопасность машин. Эргономические принципы проектирования. Часть 1. Термины, определения и общие принципы)
EN 894-1:1997+А1:2008 Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 1: General principles for human interactions with displays and control actuators (Безопасность машин. Эргономические требования по конструированию средств отображения индикаторов и органов управления. Часть 1. Общие основы взаимодействия пользователя со средствами отображения информации и органами управления)
EN 894-2:1997+А1:2008 Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 2: Displays (Безопасность машин. Эргономические требования по конструированию средств отображения информации и органов управления. Часть 2. Индикаторы)
EN 1005-3:2002+А1:2008 Safety of machinery - Human physical performance - Part 3: Recommended force limits for machinery operation (Безопасность машин. Физические возможности человека. Часть 3. Рекомендуемые пределы усилий для работы на машинах)
EN ISO 12100:2010 Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин. Общие принципы конструирования. Оценка риска и снижение риска)
_______________
Действует взамен EN 292-1:1991, EN 292-2:1991 и EN 1050:1996.
ISO 447:1984 Machine tools - Direction of operation of controls (Станки. Направление действия органов управления)
IEC 60447:2004 Basic and safety principles for man - machine interface, marking and identification. Actuating principles (Интерфейс человек-машина. Основные принципы безопасности, маркировка и идентификация. Принципы включения)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 исполнительный механизм органа управления (control actuator): Часть системы приведения в действие органа управления, которая непосредственно приводится в действие оператором, например при помощи сжатия (давления, нажима) (EN 894-1).
3.2 ручной орган управления (manual control actuator): Орган управления, который приводится в действие при помощи руки и вызывает изменение в функционировании системы (например, кнопка, грибок или штурвальное колесо). Сенсорные органы управления не относятся к ручным органам управления.
3.3 тип органов управления (control type): Определенное количество органов управления с одинаковыми характеристиками движения и взаимодействия с рукой, выполняющие сходные функции.
3.4 серия органов управления (control family): Группа типов органов управления.
3.5 оператор (operator): Лицо (или лица), выполняющее обязанности по монтажу, эксплуатации, наладке, поддержанию в исправном состоянии, обслуживанию, ремонту и транспортированию машин (EN 12100).
3.6 задача (task (work task): Деятельность или деятельности, необходимая (необходимые) для получения желаемых результатов работы технологического оборудования (EN 614-1).
3.7 управляющая задача (control task): Деятельность, при которой используется управляющее устройство для решения поставленной задачи.
4 Метод подбора
Существуют различные типы органов управления - от нажимных кнопок до штурвалов. Каждый из типов органов управления подходит для решения определенных задач и должен соответствовать определенным требованиям.
Кроме того, необходимо принять во внимание факторы окружающей среды, такие как освещение и вибрация, а также организационные факторы (например работа в группе, на рабочем месте).
Правильный выбор органов управления способствует надежному и эффективному функционированию оборудования. Ниже приведены систематизированные рекомендации для конструкторов и производителей технологического оборудования по выбору соответствующего типа органов управления в зависимости от назначения оборудования.
Выбор типа органов управления проходит в три этапа:
- определение задач и сбор информации;
- предварительный выбор серии органов управления;
- определение подходящего типа органов управления.
Основные этапы выбора органов управления приведены на рисунке 1. Пример формуляра для регистрации результатов приведен на рисунке 2. В разделе 5 приведена информация, необходимая для правильного выбора органов управления. В разделах 6 и 7 описано, как использовать данную информацию на практике.

Рисунок 1 - Сводная таблица методики выбора ручных органов управления


Рисунок 2 (а,б) - Пример формуляра для записи данных, полученных при выборе ручного управляющего устройства
5 Определение задач и сбор информации
5.1 Требования и характеристики
Разделение задач между оператором и оборудованием должно проводиться при конструировании оборудования в соответствии с EN 614-1 и EN 894-1.
Задача подразумевает наличие общих и специфических требований, которые нельзя изменить обычным образом. В случае если невозможно установить подходящий орган управления для решения специфической задачи, необходимо пересмотреть задачу или полностью ее изменить.
Приведенные ниже требования, связанные с решением конкретных задач, рассматриваемые в данном стандарте, являются, как показал опыт, наиболее важными для выбора ручного органа управления:
- общие требования, связанные с выполнением конкретных задач:
a) необходимая точность позиционирования ручного органа управления (точность);
b) необходимая скорость позиционирования (скорость);
c) требования к усилию, прикладываемому оператором (прилагаемое усилие/момент);
- специфические требования, связанные с выполнением конкретных задач:
d) визуальная различимость положения ручного органа управления (визуальный контроль);
e) обозначение положения органа управления (маркировка);
f) вероятность случайного срабатывания (случайное срабатывание);
g) предотвращение соскальзывания руки с органа управления (трение);
h) возможность работать в перчатках;
i) легкость чистки (возможность чистки).
Общие требования, связанные с выполнением конкретных задач, используются для того, чтобы определить уровень органов управления, которые могут быть использованы для решения данных задач. Специфические требования, связанные с выполнением конкретных задач, используются для того, чтобы выбрать конкретный орган управления из данного уровня. Для анализа требований, связанных с выполнением конкретных задач, необходимо использовать классификационную схему, приведенную в таблице 1. В данной схеме выделяются пять различных уровней - от 0 до 4.
Таблица 1 - Классификационная схема для анализа требований, связанных с выполнением конкретных задач
Уровень | Символ | Уровень требований |
0 | Очень низкий | |
1 | Низкий | |
2 | Средний | |
3 | Высокий | |
4 | Очень высокий |
Нет необходимости точно определять специфические требования, связанные с выполнением конкретных задач, так как точность подробного анализа, описанного в 5.2 и 5.3, и классификационная система были признаны достаточными.
Необходимо учитывать характеристики различных типов органов управления, чтобы определить имеющиеся альтернативы в выборе органов управления. В данном стандарте также приведены требования к характеристикам перемещения и характеристики захвата. Во многих случаях могут быть выделены следующие характеристики:
- характеристики перемещения:
j) вид перемещения;
k) ось перемещения;
I) направление перемещения;
m) непрерывность перемещения;
n) непрерывность перемещения и угла вращения 180°;
- характеристики захвата:
о) вид захвата;
р) часть руки, прилагающая усилие;
q) метод приложения усилия.
Характеристики от а) до q) применяются во всех разделах настоящего стандарта. Краткие описания данных характеристик сгруппированы в таблицу, приведенную на рисунке 2.
5.2 Определение общих требований, связанных с выполнением конкретных задач а) - с)
В приведенных ниже разделах описана методика заполнения формуляра, показанного на рисунке 2. Методика присвоения определенного уровня каждому из требований, связанных с выполнением конкретных задач, описана в таблице 1. Все без исключения приемлемые требования должны быть занесены в формуляр (см. рисунок 1).
5.2.1 Требование, связанное с выполнением конкретной задачи а): классификация точности позиционирования (точность).
Необходимая точность должна соответствовать одному из уровней, приведенных в таблице 1.
Необходимая точность позиционирования ручного органа управления должна определяться при практическом применении органов управления для решения необходимой задачи. На точность влияет большое количество факторов, наиболее важным из которых является непрерывность необходимого перемещения, т.е. то, функционируют ли органы управления непрерывно или дискретно.
Адекватная информативность органов управления является необходимой для оператора и позволяет свести к минимуму ошибки при использовании органов управления. При этом в методике выбора органов управления учитывается тот факт, что высокая точность является несовместимой с большим прилагаемым усилием. Поэтому стремление использовать органы управления с высокой точностью и одновременно большим прилагаемым усилием ведет к неадекватному выбору ручного органа управления.
При частом или постоянном использовании органа управления повышаются требования к его точности. Обычно ручные органы управления обладают высокой точностью. Однако ее можно повысить при использовании дополнительных механических приспособлений, таких как, например передаточный механизм. В этом случае можно добиться высокой точности позиционирования перемещающихся компонентов, даже при использовании органов управления с низкой точностью.
5.2.1.1 Дискретное установочное перемещение ручного органа управления.
Дискретным установочным перемещением ручных органов управления считается перемещение, при котором орган управления может находиться только в двух положениях, например поворотный выключатель или переключатель ВКЛ/ВЫКЛ. Ошибки при выборе органов управления возникают при необходимости использовать устройство с большим количеством возможных дискретных положений. Поэтому органы управления с 2 возможными положениями должны быть отнесены к классу требований "очень низкий", а органы управления с 24 и более возможными положениями - к классу требований "высокий".
Точность органов управления может быть повышена при помощи постоянного точного и легко воспринимаемого информирования оператора о положении, в котором находятся органы управления, а также при помощи расположения элементов оборудования таким образом, чтобы они не препятствовали информированию оператора.
При использовании ручных органов управления должны иметься в наличии индикаторы, позволяющие контролировать использование органов управления.
Положения органа управления, соответствующие его функциям, не должны обозначаться цифрами или буквами, так как в этом случае оператор вынужден вспоминать, какая цифра или буква соответствует той или иной функции, что может привести к ошибкам. Обозначения 1, 2 могут использоваться только в том случае, если значение изменяемых переменных различается как минимум на одно порядковое число. Это становится особенно важным при увеличении количества дискретных перемещений.
Все обозначения и маркировка должны соответствовать требованиям EN 894-2.
Соблюдение данных требований является особенно важным для органов управления, используемых для предотвращения или снижения вероятности получения травм или причинения вреда здоровью.
5.2.1.2 Непрерывное установочное перемещение ручного органа управления
Поскольку положение ручного органа управления постоянно изменяется в соответствии с изменением переменной, контролируемой данным органом управления, величина отклонения от данной переменной является критерием для определения величины погрешности. Вероятность возникновения погрешности зависит в первую очередь от времени, в течение которого необходимо выполнить задачу (скорость), от наличия у оператора необходимой информации и от прилагаемого усилия.
При непрерывном установочном перемещении оператор должен постоянно получать всю необходимую информацию о функционировании оборудования, например частоты и направления вращения вращающихся компонентов. Это может быть реализовано, например при помощи специального индикатора либо при помощи относительного движения другого объекта, хорошо видимого оператору (например движение токарного резца относительно шпинделя), либо при помощи других средств.
При выполнении заданий, для которых установлена скорость их выполнения, например при непрерывном сопровождении цели, высокой скорости функционирования органов управления можно добиться только в том случае, если трудоемкость прилагаемого усилия является незначительной и предусмотрена высокая информативность органа на основе оптической информации.
Требования к прилагаемому усилию при непрерывном сопровождении ведут к тому, что требования к ручным органам управления классифицируются как "очень высокие".
Направление установочного перемещения ручного органа управления и его компонентов должно соответствовать требованиям ISO 447 (для инструментов), IEC 60447 (для электрического оборудования) и EN 894-2.
5.2.2 Требования, связанные с выполнением конкретной задачи b): классификация скорости позиционирования (скорости)
Необходимая скорость позиционирования должна определяться в соответствии с классификацией, приведенной в таблице 1.
Продолжительность перемещения ручного органа управления состоит из двух компонентов времени, необходимого для того, чтобы дотянуться и взяться рукой за орган управления, и продолжительности самого перемещения. Первый компонент зависит от расположения ручного органа управления относительно оператора и от вида захвата. В целом быстрее всего приводятся в действие органы управления с контактной рукояткой. Далее следуют органы с захватом несколькими пальцами и наиболее медленными являются органы с захватом кистью. В экстренных случаях очень важным является максимально быстрое срабатывание органов управления. Поэтому для органов аварийного выключения рекомендуется использовать кнопку в виде грибка.
Высокая скорость позиционирования несовместима с большим прилагаемым усилием; наиболее высокой скорости позиционирования можно добиться только при небольшом прилагаемом усилии. Следовательно, если органы управления предназначены для выполнения на них непрерывных операций, требующих высокой скорости (например работа с клавиатурой), прилагаемое усилие должно быть незначительным. Выбор органов управления считается неудовлетворительным, если на технологическом оборудовании, требующем высокой скорости позиционирования, установлен орган управления с большим прилагаемым усилием.
5.2.3 Требования, связанные с выполнением конкретной задачи с): классификация прилагаемых усилий/моментов (сила)
Органы управления могут применяться для приведения в действие оборудования или отдельных его узлов. В некоторых случаях для приведения в действие данных узлов рекомендуется использовать органы управления с большим прилагаемым усилием. Некоторые виды оборудования снабжены механическими или другими видами вспомогательных устройств, снижающих нагрузку на оператора при работе с органами управления. Если это невозможно, то величина рекомендуемой силы или рекомендуемого момента для приведения в действие органов управления должна соответствовать одному из классов, приведенных в таблице 2. Приведенные в данной таблице символы будут использоваться далее для характеристики органов управления.
Таблица 2 - Классификация прилагаемых усилий моментов при выборе ручных органов управления
Уровень | Символ | Прилагаемое усилие, Н или прилагаемый момент, Н·м | Уровень требований |
0 |
| Очень низкий | |
1 |
| Низкий | |
2 |
| Средний | |
3 |
| Высокий | |
4 |
| Очень высокий |
5.3 Определение специфических требований, связанных с выполнением конкретных задач d) - i)
В следующих разделах описана методика заполнения формуляра в соответствии с рисунком 2.
Методика присвоения определенного класса каждому из требований, связанных с выполнением конкретных задач, приведена в таблице 1.
Некоторые из данных характеристик могут быть определены уже на начальной фазе конструирования устройства. Все характеристики, выявленные при конструировании устройства, должны быть занесены в формуляр.
Присвоение высокого уровня требований одним параметрам не означает, что всем остальным параметрам также должны присваиваться высокие уровни требований. Например присвоение уровня требований "очень высокий" параметру "предотвращение соскальзывания руки с управляющего устройства" означает, что параметру "легкость чистки" не может быть присвоен уровень требований "очень высокий". Поэтому необходимо в первую очередь присваивать максимально высокий уровень требований параметрам, обеспечивающим безопасность работы, и только после этого рассматривать менее важные параметры. Если некоторым параметрам присваиваются требования, несовместимые между собой, то в этом случае необходимо пересмотреть поставленные перед устройством задачи или, если первое невозможно, необходимо снизить требования к менее важным параметрам.
Уровни требований ко всем без исключения параметрам должны быть занесены в формуляр.
5.3.1 Требование, связанное с выполнением конкретной задачи d): визуальная различимость положения ручного органа управления (визуальный контроль)
При использовании ручных органов управления очень важным является наличие у оператора точной информации об установочном перемещении органа управления. Этого можно добиться, например при помощи индикатора, показывающего изменение того или иного параметра, либо при помощи любого другого звукового или визуального индикаторного устройства. Во многих случаях это является единственным способом обеспечить визуальный контроль за положением ручного органа управления, в особенности при дискретном перемещении органа управления. Визуальной различимости положения ручного органа управления должен быть присвоен уровень требований в соответствии с классификацией, приведенной в таблице 1.
5.3.2 Требование, связанное с выполнением конкретной задачи е): обозначение положения органа управления (маркировка)
В определенных ситуациях, когда оператор не видит органа управления или его обзор затруднен, определение положения органа управления может осуществляться при помощи специальной отдельной маркировки или шкалы. Эта же функция может использоваться в качестве дополнительного источника информации для оператора.
Обозначению положения должен быть присвоен уровень требований в соответствии с классификацией, приведенной в таблице 1.
5.3.3 Требование, связанное с выполнением конкретной задачи f): предотвращение случайного срабатывания
Важность предотвращения случайного срабатывания зависит от того, какие последствия могут возникнуть в результате этого. Оно является особенно важным, если в его результате может быть нанесена травма или причинен вред здоровью оператора.
В данном стандарте приведены требования, уровни которых различаются в зависимости от трудности случайного срабатывания. В некоторый случаях, когда велик риск получения травмы, этого может быть недостаточно. В этом случае следует принять следующие меры:
- установка органа управления в специальную выемку;
- защита органа управления, например установка кожуха, не допускающего контакт с органами управления частей тела или предметов, размеры которых больше размера руки; установка вокруг органа управления защитных бортиков;
- использование органов управления с установочным перемещением, допускающих только две позиции, перпендикулярные друг другу;
- использование систем блокировки;
- использование схемы управления в две руки. Подробнее см. EN 574.
Предотвращению случайного срабатывания должен быть присвоен класс требований в соответствии с классификацией, приведенной в таблице 1.
5.3.4 Требование, связанное с выполнением конкретной задачи g): предотвращение соскальзывания руки с органа управления (трение)
Если орган управления используется непрерывно или часто, то для его надежного и уверенного использования важно, чтобы рука оператора не соскальзывала с поверхности органа управления. Это особенно важно, если по каким-либо причинам устройство обладает большим прилагаемым усилием.
Степень предотвращения соскальзывания руки с управляющего устройства должна соответствовать одному из уровней, приведенных в таблице 1.
5.3.5 Требование, связанное с выполнением конкретной задачи h): возможность работать в перчатках
При выполнении некоторых операций оператору необходимо носить перчатки. Необходимость носить перчатки должна соответствовать одному из уровней, приведенных в таблице 1.
Если нет необходимости работать в перчатках, этому фактору может быть присвоен уровень "очень низкий" (см. таблицу 1). Если необходимо постоянно носить толстые перчатки (например при частой работе с металлическими частями), этому фактору должен быть присвоен уровень "очень высокий".
5.3.6 Требование, связанное с выполнением конкретной задачи i): легкость чистки
В некоторых случаях, например, на машинах для обработки пищевых продуктов, важно обеспечить, чтобы все части, включая исполнительные механизмы ручного управления, можно было легко очистить.
Необходимость легкости очистки должна быть отнесена к одному из уровней, как установлено в таблице 1. В зависимости от важности соблюдения гигиенических требований данному фактору может быть присвоен уровень от "высокого" до "очень высокого".
5.4 Определение характеристик перемещения
Ручные органы управления могут быть расположены в различных позициях относительно оператора. При использовании некоторых видов технологического оборудования, за которым оператор работает стоя, существует ряд стандартных позиций, которые должны быть подвергнуты анализу, требования к которому приведены в данном стандарте. Если оператор работает сидя, также должен быть проведен анализ характеристик его движений.
Требования, приведенные в данном стандарте, могут быть применены только к органам управления, установленным непосредственно в зоне досягаемости оператора. В случае если данный стандарт применяется к органам управления, не соответствующим приведенному выше требованию, определение всех требований к данным органам управления должно проводиться с особой тщательностью. В случае возникновения сомнений необходимо провести практическое испытание с участием оператора (см. EN 614-1).
При проведении анализа должна использоваться прямоугольная система координат, показанная на рисунке 3.

Рисунок 3 - Система координат для поступательного и вращательного движения
Пять характеристик (j, k, I, m, n) являются характеристиками установочного перемещения. При проведении анализа необходимо описать местоположение установочного перемещения в зоне досягаемости. Предполагается, что в формуляр должны заноситься только те ограничения установочного перемещения, которые были определены при первоначальном конструировании оборудования (см. рисунок 2).
5.4.1 Вид перемещения j): поступательное или вращательное перемещение
Вид установочного перемещения, для которого предназначен орган управления, может принадлежать к одной из двух групп в зависимости от того, является ли оно поступательным или вращательным. Работа с длинными рычагами считается поступательным перемещением. Если при проектировании оборудования было определено, что для работы с ним необходимо использовать один из двух видов установочного перемещения, то в формуляре должно быть указано "поступательное" либо "вращательное" (см. рисунок 2).
5.4.2 Вид перемещения k): ось перемещения
Осью перемещения считается ось, вдоль которой или вокруг которой совершается установочное перемещение, выполняемое оператором (см. рисунок 3). При этом необходимо принять во внимание различные перемещения, которые может выполнить оператор, а также движения верхней части туловища оператора, когда он работает с органами управления. Если при конструировании оборудования было предусмотрено ограничение, касающееся вида перемещения органа управления (поступательное или вращательное), то в формуляр должны быть занесены необходимые оси перемещения. Преобладающая ось перемещения (х, у, z в соответствии с рисунком 3) должна быть занесена в формуляр.
5.4.3 Характеристика перемещения I): направление перемещения
Направление перемещения - это направление установочного перемещения по одной из осей (см. рисунок 3), выполняемое оператором. При поступательном и вращательном перемещении его направление показывается знаками "+" и "-". Если при конструировании оборудования были предусмотрены ограничения, касающиеся вида перемещения органа управления, то в формуляр должны быть занесены допустимые направления перемещения. Если конструкция оборудования требует перемещение органа управления в обоих направлениях, то в формуляр должен быть занесен знак "+/-".
5.4.4 Характеристика перемещения m): непрерывность перемещения
Необходимо установить, является ли перемещение непрерывным или дискретным. Если при конструировании оборудования было определено, что в нем может быть использован только орган управления с одним из данных видов перемещения, то в формуляр должно быть занесено, для какого из двух видов перемещения органов управления (непрерывное или дискретное) предназначено оборудование.
Примечание - Данная характеристика должна быть в обязательном порядке определена при составлении общих требований к эксплуатации органа управления и при определении точности и скорости позиционирования.
Если эксплуатация органа управления связана с показаниями индикационных устройств, то установочное перемещение должно быть совместимо с данными показаниями (EN 894-1 и EN 894-2).
5.4.5 Характеристика перемещения n): угол непрерывного вращения 180°
Необходимо установить, может ли при непрерывном вращательном перемещении угол вращения быть 180° (да/нет). Если при конструировании оборудования были установлены ограничения относительно того, могут ли в нем использоваться органы управления с вращательным перемещением, превышающим половину оборота, то эта информация должна быть занесена в формуляр.
5.5 Характеристики захвата
Характеристики захвата описывают вид взаимодействия между рукой и органом управления. Различают три вида захвата. В формуляр должны заноситься только те ограничения по виду захвата, которые были определены при конструировании оборудования.
5.5.1 Характеристики захвата о): вид захвата
Необходимо указать вид захвата органов управления оператором. Выделяются 3 вида захвата:
- контакт: при этом сила прикладывается по направлению, соответствующему воздействию указательного пальца, большого пальца или руки на органы управления (см. рисунок 4);
- захват несколькими пальцами: органы управления приводятся в действие пальцами и/или рукой, не сжатой в кулак (см. рисунок 4);
- захват кистью: при этом все пальцы обхватывают органы управления (см. рисунок 4).

Рисунок 4 - Виды захвата
Если при конструировании оборудования были определены ограничения, касающиеся типа захвата, тогда допустимые виды захвата должны быть указаны в формуляре.
5.5.2 Характеристики захвата р): часть руки, прилагающая усилие
Часть руки, прилагающая усилие, - это часть руки, палец, пальцы или вся рука, используемая для приведения в действие органа управления. Если при конструировании оборудования были определены ограничения, касающиеся части руки, прилагающей усилие, тогда в формуляре должна быть указана часть руки, которая должна прилагать усилие.
5.5.3 Характеристики захвата q): метод приложения усилия
Необходимо определить, прилагается ли сила вертикально или по касательной. Первый вид приложения силы зависит от формы управляющего устройства и от вида взаимодействия (с геометрическим замыканием), в то время как при втором виде трение между органом управления и рукой (фрикционное) является определяющим. Если при конструировании оборудования были определены ограничения, касающиеся метода приложения усилия, тогда в формуляре должно быть указано, какой метод приложения усилия должен иметь место (вертикальное усилие или усилие по касательной).
5.6 Описание задач
Формуляр, приведенный на рисунке 2, служит в качестве вспомогательного средства для регистрации задач, стоящих перед органом управления. Данный формуляр должен быть заполнен максимально подробно. Желательно также указать в нем, какие из задач являются наиболее важными или критическими, а также, какие задачи нельзя изменять; для этого можно использовать графу "Примечание".
6 Выбор серии органов управления
На следующем этапе выбора органа управления необходимо занести в формуляр все задачи органа управления в соответствии с требованиями, приведенными ниже.
В соответствии с рисунками 5 и 6 производится выбор серии органов управления, двигающихся поступательно или вращательно. В первой графе приведен порядковый номер (L1...L41 и R1...R33). В трех следующих графах приведены возможные комбинации точности позиционирования, скорости позиционирования и приложения усилия с использованием классификационной схемы, приведенной в разделе 5. В пятой графе указаны оси перемещения и направления вращения, которые допустимы при той комбинации точности позиционирования, скорости позиционирования и приложения усилия, которая указана в трех предыдущих графах. В двух последних графах таблицы указан номер серии органов управления, соответствующей всем указанным ранее характеристикам. Одна графа относится к органам управления с дискретным перемещением, другая - к органам управления с непрерывным перемещением. На рисунке 6 в таблице есть еще одна дополнительная графа, в которой указано, есть ли необходимость использовать серию органов управления с усилием приложения, большим чем пол-оборота.

Рисунок 5 - Выбор серии органов управления (поступательное перемещение)

Рисунок 6 - Выбор серии органов управления (вращательное перемещение)
Если при конструировании оборудования было определено, что в нем должны быть использованы органы управления только одного из двух видов (с поступательным перемещением либо с вращательным перемещением), тогда выбор серии органов управления должен проводиться только на основании соответствующего рисунка (рисунок 5 или 6).
Рисунки 5 и 6 должны использоваться следующим образом:
- шаг 1: Из формуляра (рисунок 2) берутся все возможные комбинации скорости позиционирования, точности позиционирования и прилагаемого усилия;
- шаг 2: Данные комбинации сравниваются с комбинациями, приведенными в соответствующих графах на рисунках 5 и 6;
- шаг 3: Из рисунков 5 и 6 выбираются все без исключения строки, соответствующие требованиям, предъявляемым к органам управления для данного оборудования;
- шаг 4: В выбранных строках характеристики перемещения сравниваются с теми, которые занесены в формуляр;
- шаг 5: Выбираются все без исключения серии органов управления, соответствующие данным требованиям.
Затем необходимо проанализировать характеристики перемещения. Необходимые характеристики перемещения нужно сравнить с возможными характеристиками перемещения, приведенными на рисунках. Оси k) и направления вращения I), необходимые для выбора серии управляющего устройства, берутся из соответствующей графы таблицы. Если определено, что необходим орган управления с дискретным либо непрерывным перемещением, тогда необходимо использовать соответствующую графу таблицы.
В каждой строке, в которой указаны параметры органов управления, соответствующие всем требованиям, необходимо запомнить номер серии органов управления, указанный в соответствующей графе.
Если ни в одной из строк нет параметров, соответствующих необходимым требованиям, значит для данного оборудования невозможно подобрать подходящий орган управления. В этом случае необходимо пересмотреть требования, связанные с выполнением конкретных задач, предъявляемые к органам управления. Требования необходимо пересматривать до тех пор, пока на рисунках 5 и 6 не обнаружится как минимум одна строка с параметрами, соответствующими предъявляемым требованиям.
7 Выбор типа органов управления
Дальнейший выбор органов управления осуществляется сравнением специфических требований, связанных с выполнением конкретных задач, и видов захвата в каждой из серии защитных устройств, выделенной на предыдущем этапе (см. раздел 6). При этом необходимо принять во внимание задачи, стоящие перед органом управления и зафиксированные в формуляре (см. рисунок 2).
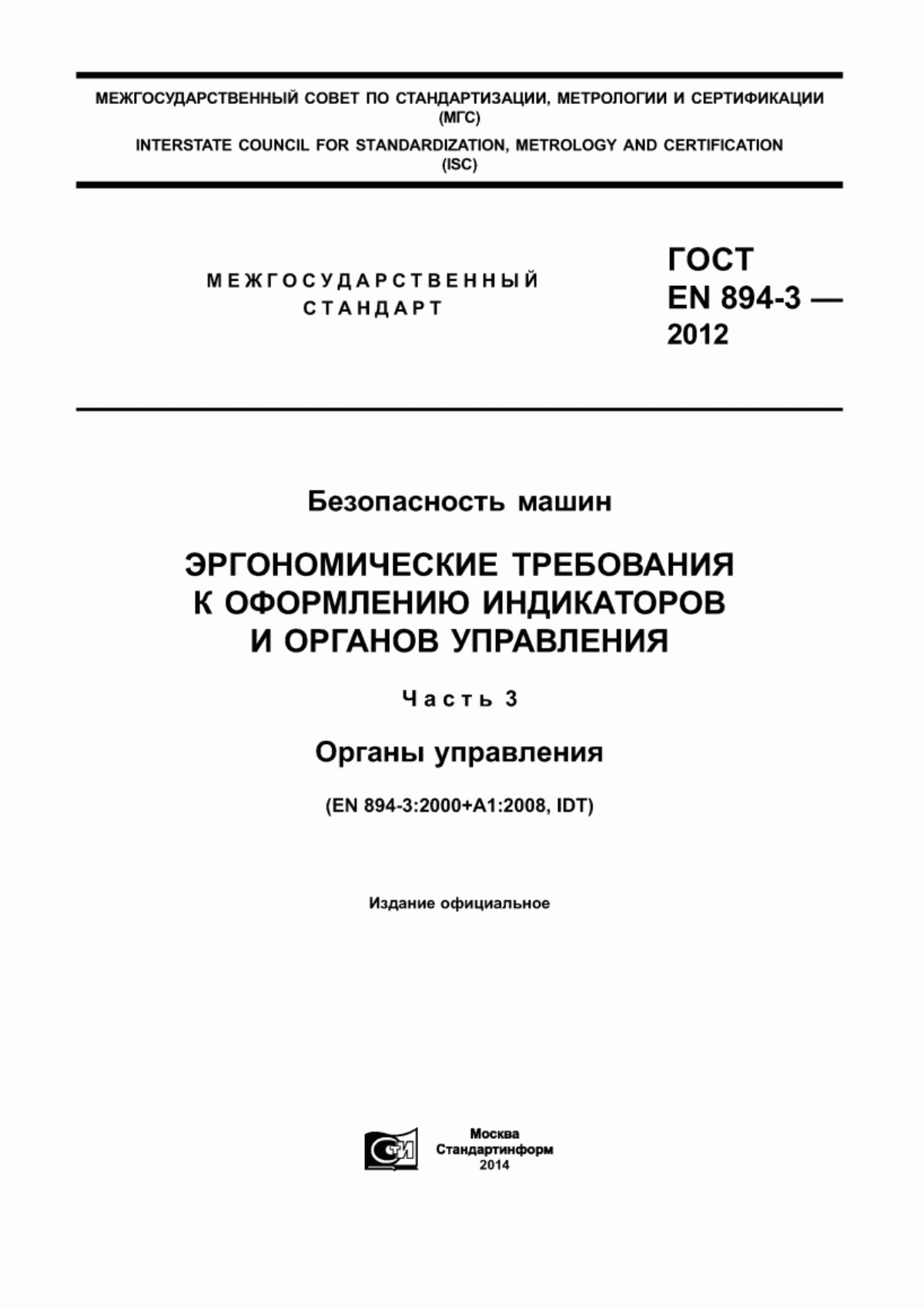
На рисунке 7 приведены данные о характеристиках различных типов органов управления. Они разделены на 4 группы:
- поступательные органы управления - дискретное установочное перемещение;
- поступательные органы управления - непрерывное установочное перемещение;
- вращающиеся органы управления - дискретное установочное перемещение;
- вращающиеся органы управления - непрерывное установочное перемещение.
Номер в первой графе каждого раздела указывает на группу сходных органов управления, он используется в качестве перекрестной ссылки на рисунках 5 и 6.
Во второй графе приведены характеристики захвата для данного типа органа управления.
Указан вид захвата о), часть руки, прилагающая усилие р) и метод приложения усилия q). В третьей графе описаны отдельные типы органов управления, принадлежащие к данной серии органов управления. В следующей графе показан типичный пример данного типа органов управления. Следующие шесть граф показывают характеристики данного типа органа управления, касающиеся специфических требований, связанных с выполнением конкретных задач d, e, f, g, h, i. В последней графе приведены примечания.



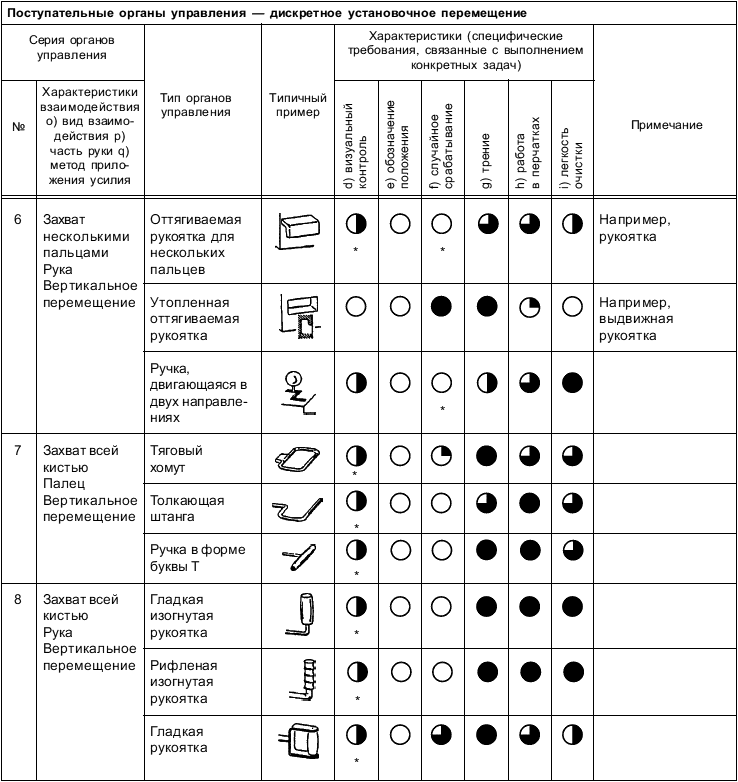





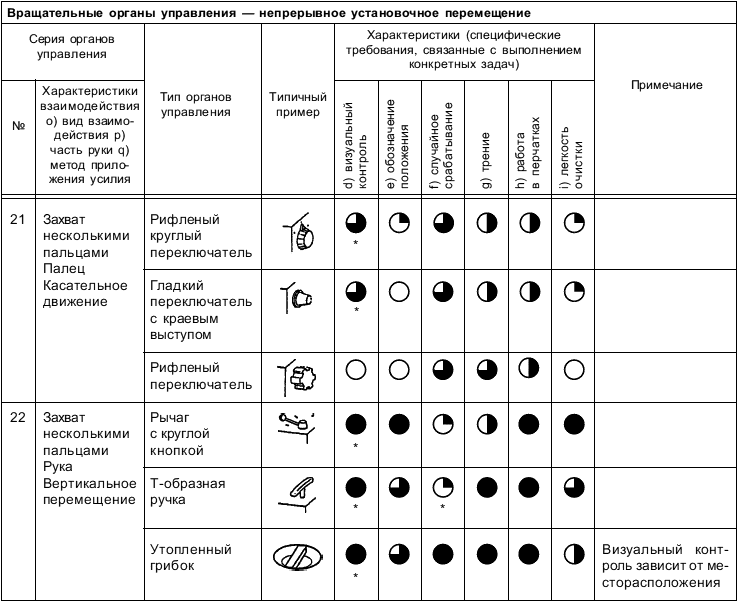




Рисунок 7 - Выбор типа органов управления
Шаг 1 - Сравнение характеристик захвата
На рисунке 7 необходимо найти номера тех серий органов управления, которые соответствуют всем требованиям и которые были выбраны из рисунков 5 и 6. Данные номера приведены в первой графе таблицы, изображенной на рисунке 7.
Если в формуляр (см. рисунок 2) были внесены необходимые характеристики захвата, тогда их необходимо сравнить с характеристиками органов управления, принадлежащих к каждой из серий.
В шаге 2 рассматриваются только те серии органов управления, характеристики захвата которых отвечают требованиям.
Шаг 2 - Сравнение специфических требований, связанных с выполнением конкретных задач
Для каждого из типов органов управления из выбранных серий органов управления необходимо сравнить специфические требования, связанные с выполнением конкретных задач, с характеристиками d, e, f, g, h и i, приведенными на рисунке 7.
Если эти требования совпадают с данными характеристиками, то соответствующий тип органов управления отбирается для дальнейшего рассмотрения.
Тип органов управления не используется для дальнейшего анализа, если характеристики, приведенные на рисунке 7, не соответствуют требованиям, предъявляемым к органам управления для данного оборудования.
Если не выделено ни одного типа органа управления, характеристики которого соответствуют специфическим требованиям, связанным с выполнением конкретных задач для данного оборудования, то необходимо пересмотреть требования к органам управления таким образом, чтобы как минимум один из типов органов управления, приведенных на рисунке 7, соответствовал данным требованиям.
Проверка влияния месторасположения органов управления (пространственное расположение)
Характеристики "визуальный контроль d)" и "случайное срабатывание f)" некоторых типов органов управления помечены звездочкой. Характеристики данных органов управления в значительной мере зависят от их месторасположения относительно оператора. Необходимо тщательно проанализировать расположение данных органов управления. Их неправильное месторасположение может привести к тому, что они не будут соответствовать характеристикам, приведенным на рисунке 7.
Примечание - Ссылки на более подробную информацию о влиянии месторасположения на данные характеристики приведены в 8.5.
Если возникают сомнения относительно правильности расположения органов управления, тогда должен быть проведен эксперимент с участием оператора.
Если требования по визуальному контролю d) не могут быть выполнены, необходимо определить, можно ли установить на оборудование дополнительные устройства индикации и нанести маркировку.
Если после принятия описанных выше мер не может быть выделен ни один подходящий орган управления, то необходимо пересмотреть задачи, стоящие перед органом управления. Если было выбрано несколько типов органов управления, подходящих для решения конкретных задач, то рекомендуется выделить наиболее важные требования для решения данных задач и на их основе выбрать наиболее подходящий орган управления.
8 Дополнительные требования к проектированию органов управления
Если ошибки оператора при эксплуатации органов управления могут привести к получению травмы или нанесению вреда здоровью, тогда необходимо выбирать только те органы управления, которые соответствуют рекомендациям данного раздела. Решение должно приниматься на основе оценки риска, проведенной в соответствии с требованиями EN 1050.
В разделе 5 органы управления были разделены на группы (контакт, захват несколькими пальцами, захват всей кистью) на основе вида захвата, необходимого для эксплуатации управляющего устройства. В дальнейшем будет использоваться эта же классификация.
8.1 Размеры
Рекомендуемые минимальные размеры органов управления приведены в таблице 3 (графы 3 и 4). При захвате всей кистью затраты сил увеличиваются, поэтому для органов управления с захватом всей кистью данные параметры должны быть увеличены.
Таблица 3 - Рекомендуемые минимальные размеры ручных органов управления
Вид захвата | Часть руки, прилагающая усилие | Ширина или диаметр органа управления | Длина органа управления вдоль оси движения или вращения |
Контакт | Палец |
|
|
Большой палец |
|
| |
Рука (ладонь) |
|
| |
Захват несколькими | Палец/большой палец | 7 | 7 |
пальцами | Рука/большой палец | 15 | 60 |
Захват всей кистью | Палец/рука | 15 |
|
8.2 Прилагаемое усилие/момент
Рекомендуемое максимальное прилагаемое усилие и прилагаемый момент приведены в таблице 4 (графы 4 и 5).
Таблица 4 - Рекомендуемые максимальное прилагаемое усилие и максимальный прилагаемый момент для ручных органов управления
Вид захвата | Часть руки, прилагающая усилие | Дополнительные факторы | Рекомендуемое максимальное поступательное прилагаемое усилие, Н | Рекомендуемый максимальный прилагаемый момент, Н·м |
Контакт | Палец | Любое направление | 10 | 0,5 |
Большой палец | Любое направление | 10 | 0,5 | |
Рука | Любое направление | 20 | 0,5 | |
Захват несколькими пальцами | Палец/рука | Любое направление | 10 | 1 |
Х-направление | 10 | 2 | ||
Y-направление | 20 | 2 | ||
Z-направление | 10 | 2 | ||
Захват всей кистью | Одна рука | Х-направление | 35 | |
Y-направление | 55 | |||
Z-направление | 35 | |||
0,25 m радиус | 20 | |||
Обе руки | 0,25 m радиус | 30 |
Для упрощения практического использования приведенные выше значения были оптимизированы. Были приняты во внимание наиболее частые или постоянные положения (см. EN 1005-3).
Вероятность случайного срабатывания снижается при повышении прилагаемого усилия на 5 Н. Такие дополнительные меры безопасности, как использование кожухов и крышек, а также правильная их установка снижают вероятность случайного срабатывания органов управления.
8.3 Расположение органов управления относительно оператора
Любой ручной орган управления должен быть расположен таким образом, чтобы оператор мог без перегрузок и неудобств работать с ним и получать всю необходимую информацию от устройств индикации, если таковые имеются. Если с оборудованием работают операторы разного роста, рекомендуется оснастить оборудование специальным устройством, позволяющим регулировать расположение рабочего места в зависимости от роста оператора. Это особенно важно, если органы управления используют постоянно или часто.
Данный стандарт может быть применен только к органам управления, расположенным в зоне видимости и досягаемости оператора, находящегося на рабочем месте. Если органы управления находятся вне зоны видимости и досягаемости оператора, то характеристики "визуальный контроль" и "вероятность случайного срабатывания" могут быть неверно оценены. В этом случае характеристике "обозначение положения органа управления" должен быть присвоен высокий уровень требований.
8.4 Расположение органов управления с визуальными указателями
Если ручной орган управления совмещен с устройством индикации, то расположение и размеры устройства индикации должны соответствовать требованиям EN 894-2. Ручные органы управления с устройством индикации должны быть легко доступными для оператора.
Если из-за своих функциональных особенностей или особенностей эксплуатации ручные органы управления объединены в группу или группы, то они должны быть расположены в той же последовательности, что и соответствующие им устройства индикации.
8.5 Совместимость направления перемещения и показаний устройств индикации
Взаимосвязь между направлением перемещения и изменением показаний устройств индикации должна соответствовать требованиям EN 984. Также в ISO 447 приведены требования по управлению станками, а в IEC 60447 приведены общие требования к электрическим органам управления для различного оборудования. Оба этих стандарта должны приниматься во внимание при выборе органов управления.
Приложение А
(справочное)
Пример применения данного стандарта
В настоящем приложении описано использование стандарта на практике для выбора органов управления.
А.1 Определение задач и сбор информации (раздел 5)
Необходимо выбрать орган управления для регулирования уровня громкости звука в аудиометре. Регулирование должно быть легким и точным, чтобы пользователь мог легко установить необходимый уровень громкости звука. Было определено, что к органу управления, который необходимо установить в данное оборудование, предъявляются лишь незначительные требования относительно скорости позиционирования и не предъявляются никакие требования относительно прилагаемого усилия. Данные общие требования были занесены в формуляр (рисунок 2).
При рассмотрении специфических требований, связанных с выполнением конкретных задач, было определено, что к органу управления, необходимому для данного оборудования, предъявляются низкие требования по визуальному контролю и обозначению положения, средние требования по вероятности случайного срабатывания и не предъявляется никаких требований по трению, возможности работать в перчатках и легкости очистки. Вся данная информация была занесена в формуляр.
Так как при эксплуатации аудиометра необходимо изменять уровень громкости звука от более низкого к более высокому и наоборот, следовательно, орган управления должен позволять выполнять установочное перемещение в обоих направлениях ("+" и "-"). Кроме того, необходимо, чтобы уровень громкости звука регулировался органом управления непрерывного действия. Оба эти требования также были занесены в формуляр, остальные графы были оставлены пустыми. После этого формуляр был заполнен в соответствии с требованиями данного стандарта. Заполненный формуляр приведен на рисунке А.1.
А.2 Выбор серии органов управления (раздел 6)
Значения параметров а), b) и с), указанные в формуляре, были сравнены с характеристиками серий органов управления, приведенными на рисунке 5 (поступательные органы управления) и рисунке 6 (вращательные органы управления).
Уровень требований | ||
а) точность позиционирования | b) скорость позиционирования | с) прилагаемое усилие |
На данных рисунках были выбраны графы, в которых указаны характеристики, отвечающие минимальным требованиям к органам управления. Данным требованиям соответствуют порядковые номера L19, L24, L25, R1, R30 и R32. Они все объединены на рисунке А.2.

Рисунок А.1 - Формуляр для выбора органа управления, регулирующего уровень громкости звука

Рисунок А.2 - Предварительный выбор серии органов управления
Органы управления, входящие в серии, описанные на рисунке А.2, обладают высокой точностью позиционирования и как минимум низким прилагаемым усилием; на данном этапе отбора данные значения прилагаемого усилия являются приемлемыми.
Следующий шаг - проверка характеристик перемещения. На рисунке А.1 указано, что орган управления должен перемещаться в обоих направлениях. Относительно оси перемещения никаких ограничений нет. Для использования в аудиометре необходим орган управления непрерывного действия, следовательно при дальнейшем анализе будут рассматриваться только группы органов управления с непрерывным приложением усилия.
Анализ рисунка А.2 позволяет увидеть, что органы управления в графе R1 могут вращаться по двум осям X и Z в обоих направлениях. Из графы "Номер серии органов управления" видно, что серия органов управления 30 соответствует данным требованиям для органов управления с непрерывным приложением усилия.
Более тщательный анализ показывает, что органы управления в графе L19 позволяют выполнять приложение усилия только по оси "Y+", но не позволяют выполнять его по оси "Y-". Орган управления в графе L24 позволяет выполнять приложение усилия по "Y-", но не позволяет по "Y+". Однако обе эти графы соответствуют серии органов управления номер 11. Таким образом, можно сделать вывод, что органы управления, относящиеся к серии номер 11, позволяют выполнять приложение усилия по обоим направлениям вдоль оси Y.
Точно таким же образом можно сделать вывод, что органы управления под порядковыми номерами R30 и R32 и относящиеся к серии номер 28, отвечают всем необходимым требованиям.
Устройства под порядковым номером L25 не будут использоваться для дальнейшего анализа, так как они не соответствуют требованиям.
Таким образом для использования в аудиометре подходят серии органов управления 11, 30, 28.
А.3 Выбор типа органов управления
Каждая из серий органов управления должна быть подвергнута дальнейшему рассмотрению на основе рисунка 7, которое заключается в анализе характеристик выбранных серий органов управления (характеристики d, e, f, g, h, i, о, р, q в соответствии с рисунком А.1) и их сравнении со специфическими требованиями, предъявляемыми к органу управления для данного оборудования.
К серии 11 относятся поступательные ползунки, приводимые в движение пальцем.
К серии 30 относятся вращаемые ручки, захватываемые несколькими пальцами.
К серии 28 относятся небольшие рукоятки со штифтом или изогнутым рычажком.
Рассмотрение специфических требований, связанных с выполнением конкретных задач, позволяет сделать следующие выводы:
- серия органов управления 11 (поступательное перемещение) является подходящей, если оператор отказывается от использования дополнительной маркировки;
- серия органов управления 30 не соответствует требованиям визуального контроля и маркировки;
- серия органов управления 28 не соответствует требованиям по маркировке, причем только тип "Круглая ручка со шкалой и штифтом" соответствует требованиям по визуальному контролю месторасположения.
В результате проведенного анализа видно, что необходимо либо снизить требования по определению положения органов управления, и тогда может быть использован ползунок, либо использовать другой метод для повышения точности позиционирования (описанный в 5.2.1.2) и провести повторный анализ.
Если использовать ползунок из серии 11, то он должен быть установлен таким образом, чтобы установочное перемещение осуществлялось вдоль оси Y. В этом случае будут соблюдены требования по точности позиционирования и визуальному контролю.
Как видно из рисунка 7, ползунок с выпуклой или вогнутой поверхностью обладает лучшими характеристиками, касающимися визуального контроля, вероятности случайного срабатывания и вероятности соскальзывания руки по сравнению с ползунком с гладкой поверхностью. Но, как говорилось выше, визуальный контроль при работе с данным органом управления во многом зависит от его месторасположения, поэтому определения положения данного ползунка и его установку необходимо провести с особой тщательностью.
Вывод - Серия органов управления 11 является наиболее подходящей для использования в качестве регулятора уровня громкости звука в аудиометре, так как данные управляющие устройства соответствуют всем предъявляемым к ним требованиям. Круглая ручка со шкалой и штифтом из серии 28 также может быть использована, однако она в гораздо меньшей степени соответствует требованиям, предъявляемым к органам управления для данного оборудования.
Приложение ZA
(справочное)
Взаимосвязь европейского стандарта и основных требований Директивы 98/37/ЕС с учетом изменений, внесенных Директивой 98/79/ЕС
Европейский стандарт, на основе которого подготовлен настоящий межгосударственный стандарт, разработан Европейским комитетом по стандартизации (CEN) по поручению Комиссии Европейского сообщества и Европейской ассоциации свободной торговли (EFTA) и реализует основные требования Директивы 98/37/ЕС с учетом изменений, внесенных Директивой 98/79/ЕС.
Европейский стандарт размещен в официальном журнале Европейского сообщества как взаимосвязанный с этой директивой и применен как национальный стандарт не менее чем в одной стране - члене сообщества. Соответствие нормативным разделам европейского стандарта, приведенным в таблице ZA.1, предоставляет в пределах области применения настоящего стандарта презумпцию соответствия основным требованиям этой директивы и регламентирующим документам EFTA.
Таблица ZA.1 - Соответствие между европейским стандартом и Директивой 98/37/ЕС с учетом изменений, внесенных Директивой 98/79/ЕС
Раздел (подраздел) настоящего стандарта | Основные требования Директивы 98/37/ЕС с учетом изменений, внесенных Директивой 98/79/ЕС | Примечание |
Все разделы | Приложение I: 1.1.2, 1.2 |
Примечание - К продукции, на которую распространяется европейский стандарт, могут применяться требования других стандартов (документов) и директив ЕС.
Приложение ZB
(справочное)
Взаимосвязь европейского стандарта и основных требований Директивы 2006/42/ЕС
Европейский стандарт, на основе которого подготовлен настоящий межгосударственный стандарт, разработан Европейским комитетом по стандартизации (CEN) по поручению Комиссии Европейского сообщества и Европейской ассоциации свободной торговли (EFTA) и реализует существенные требования Директивы 2006/42/ЕС.
Европейский стандарт размещен в официальном журнале Европейского сообщества как взаимосвязанный с этой директивой и применен как национальный стандарт не менее чем в одной стране - члене сообщества. Соответствие нормативным разделам европейского стандарта, приведенным в таблице ZB.1, предоставляет в пределах области применения настоящего стандарта презумпцию соответствия основным требованиям этой директивы и регламентирующим документам EFTA.
Таблица ZB.1 - Соответствие между европейским стандартом и Директивой 2006/42
Раздел (подраздел) настоящего стандарта | Основные требования Директивы 2006/42/ЕС | Примечание |
Все разделы | Приложение I: 1.1.2, 1.1.6, 1.2, 3.3 |
Примечание - К продукции, на которую распространяется европейский стандарт, могут применяться требования других стандартов (документов) и директив ЕС.
Приложение ДА
(справочное)
Сведения о соответствии межгосударственных стандартов ссылочным европейским стандартам
Таблица ДА.1 - Сведения о соответствии межгосударственных стандартов ссылочному международному стандарту
Обозначение и наименование ссылочного международного стандарта | Обозначение и наименование международного стандарта другого года издания | Степень соответствия | Обозначение и наименование межгосударственного стандарта |
EN 292-1:1991 Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основные термины, методика | ISO/TR 12100-1:2003 Безопасность машин. Основные понятия. Общие принципы для проектирования. Часть 1. Базовая терминология, методология | IDT | ГОСТ ИСО 12100-1-2007* Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основные термины, методология |
________________ * Вероятно, ошибка оригинала. Следует читать: ГОСТ Р ИСО 12100-1-2007 . - . | |||
EN 292-2:1991 Безопасность машин. Основные понятия, общие принципы конструирования. Часть 2. Технические правила и технические требования | ISO/TR 12100-2:2003 Безопасность машин. Основные понятия. Общие принципы для проектирования. Часть 2. Технические принципы и спецификация | IDT | ГОСТ ИСО 12100-2-2007* Безопасность машин. Основные понятия, общие принципы конструирования. Часть 2. Технические принципы |
________________ * Вероятно, ошибка оригинала. Следует читать: ГОСТ Р ИСО 12100-2-2007. - . | |||
УДК 658.512.23:006.354 | МКС 13.100; | IDT |
13.180 | ||
Ключевые слова: безопасность машин, эргономика, рабочее место, устройство сигнальное, орган управления, оператор обслуживающий, взаимодействие, опасность | ||
Электронный текст документа
и сверен по:
, 2014
