ГОСТ 10169-77
(СТ СЭВ 1106-78,
СТ СЭВ 3559-82)
Группа Е69
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ТРЕХФАЗНЫЕ СИНХРОННЫЕ
Методы испытаний
3-phase synchronous machines. Test methods
Дата введения 1978-01-01
в части пп.25-27 1979-07-01
ВВЕДЕН В ДЕЙСТВИЕ постановлением Государственного комитета стандартов Совета Министров СССР от 28 января 1977 г. N 233
Проверен в 1982 г. Постановлением Госстандарта от 24.11.82 N 4437 срок действия продлен до 01.01.88*
_______________________________
* Ограничение срока действия снято по протоколу Межгосударственного Совета по стандартизации, метрологии и сертификации (ИУС N 2, 1993 год). - .
ВЗАМЕН ГОСТ 10169-68
ПЕРЕИЗДАНИЕ декабрь 1983 г. с Изменениями N 1, 2, 3, утвержденными в марте 1980 г., ноябре 1982 г., декабре 1983 г. (ИУС N 5-1980 г., ИУС N 2-1983 г., ИУС N 3-1984 г.)
ВНЕСЕНО Изменение N 4, утвержденное и введенное в действие Постановлением Государственного комитета СССР по стандартам от 25.06.87 N 2499 с 01.01.88
Изменение N 4 внесено изготовителем базы данных по тексту ИУС N 10 1987 год
Настоящий стандарт распространяется на трехфазные синхронные машины мощностью от 1 Кв·А и выше при частоте переменного тока от 10 до 400 Гц.
Стандарт не распространяется на специальные машины, например, с постоянными магнитами, реактивные, индукторные.
Стандарт устанавливает следующие методы испытаний:
определение зазора между статором и ротором и формы их поверхности (разд.2);
измерение сопротивления изоляции обмоток относительно корпуса машины и между обмотками, сопротивления изоляции термопреобразователей сопротивления и сопротивления изоляции подшипников и уплотнений (разд.3);
измерение сопротивления обмоток и термопреобразователей сопротивления при постоянном токе в практически холодном или нагретом состоянии (разд.4);
испытание при повышенной частоте вращения (разд.5);
испытание изоляции обмоток на электрическую прочность относительно корпуса машины и между обмотками (разд.6);
испытание междувитковой изоляции обмоток на электрическую прочность (разд.7);
определение характеристики холостого хода и симметричности напряжения (разд.8);
определение характеристики трехфазного замыкания (разд.9);
определение тока третьей гармонической (разд.10);
измерение тока возбуждения ненагруженной синхронной машины в режиме перевозбуждения при номинальном напряжении и номинальном токе якоря и определение U-образной характеристики (разд.11);
определение номинального тока возбуждения, номинального измерения напряжения и регулировочной характеристики (разд.12);
определение коэффициента искажения синусоидальности кривой напряжения и коэффициента телефонных гармоник (разд.13);
испытание при кратковременной перегрузке по току или по вращающему моменту (разд.14);
определение потерь и коэффициента полезного действия (разд.15);
испытание на нагревание (разд.16);
испытание на внезапное трехфазное короткое замыкание (разд.17);
определение отношения короткого замыкания и синхронных индуктивных сопротивлений (разд.18);
определение переходного индуктивного сопротивления (разд.19);
определение сверхпереходных индуктивных сопротивлений (разд.20);
определение индуктивного и активного сопротивлений обратной последовательности (разд.21);
определение индуктивного и активного сопротивлений нулевой последовательности (разд.22);
определение индуктивного сопротивления рассеяния якоря и расчетного индуктивного сопротивления (разд.23);
определения постоянных времени (разд.24);
определение параметров по переходным функциям с учетом многоконтурности ротора (разд.25);
определение частотных характеристик (разд.26);
определение параметров по частотным характеристикам (разд.27);
испытание системы возбуждения (разд.28);
определение номинального времени ускорения и постоянной запасенной энергии (разд.29);
определение пусковых токов и вращающих моментов синхронных двигателей и синхронных компенсаторов, не имеющих пусковых двигателей; определение максимального вращающего момента (разд.30);
измерение электрического напряжения между концами вала (разд.31);
определение утечек водорода (разд.32);
измерение вибрации (разд.33);
измерение шума (разд.34);
испытание масло-, газо- и воздухоохладителей (разд.34а);
требования безопасности при испытании машин (разд.35).
(Измененная редакция, Изм. N 4).
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Измерительная аппаратура, применяемая для испытаний, - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
1.2. Обмотки машины при испытании должны быть соединены, если нет других указаний, по рабочей схеме. Определение всех параметров следует производить применительно к схеме соединения фаз якоря в звезду, если по условиям проведения опыта не требуется другая схема соединения, например открытый треугольник. Если обмотка якоря машины соединена в треугольник, то полученные значения параметров соответствуют эквивалентной обмотке, соединенной в звезду.
1.3. Все параметры и характеристики рекомендуется выражать в относительных единицах, принимая в качестве базисных номинальные значения линейного напряжения и полной мощности
. В этом случае базисное значение тока должно соответствовать
![]() ,
,
а базисное значение полного сопротивления
 .
.
Промежуточные вычисления допускается производить в физических единицах в системе СИ с последующим пересчетом определяемого параметра в относительные единицы. Время рекомендуется выражать в секундах.
За базисные значения частоты тока или напряжения и угловой скорости машины следует принимать соответственно их номинальные значения ![]() и
и ![]() .
.
За базисное значение тока возбуждения при вычислении характеристик и построении диаграмм следует принимать ток возбуждения, соответствующий номинальному напряжению по характеристике холостого хода ().
При наличии у машин нескольких номинальных значений полной мощности, тока, линейного напряжения и частоты вращения должны оговариваться значения, принимаемые за базисные. Допускается выражать значение вращающего момента в долях номинального.
Указанная система единиц принята в настоящем стандарте. Строчными буквами обозначены значения величин в относительных единицах, а прописными - в физических единицах.
1.4. Электромагнитные параметры, определяемые настоящим стандартом, соответствуют теории двух реакций. При этом предполагают, что дополнительно к обмотке возбуждения имеются по одному эквивалентному демпферному контуру по продольной и по перечной осям машины (за исключением пп.25-27).
В связи с этим стандарт предусматривает методы определения трех индуктивных сопротивлений (синхронного, переходного и сверхпереходного) и двух постоянных времени (переходной и сверхпереходной) - по продольной оси, двух индуктивных сопротивлений (синхронного и сверхпереходного) и одной постоянной времени - по поперечной оси, а также определение постоянной времени обмотки якоря, замкнутой накоротко.
Постоянные времени определяют из условия, что соответствующие переходные составляющие токов и напряжений изменяются по экспоненциальному закону.
Если кривая изменения рассматриваемой составляющей, полученная опытным путем, не является чисто экспоненциальной (например, у машин с массивным ротором) в качестве эквивалентной постоянной времени следует принимать время, в течение которого эта составляющая уменьшается до ![]() =0,368, своего первоначального значения. Кривые затухания, соответствующие этим постоянным времени, должны рассматриваться как эквивалентные кривые, заменяющие действительные кривые, полученные по данным измерений.
=0,368, своего первоначального значения. Кривые затухания, соответствующие этим постоянным времени, должны рассматриваться как эквивалентные кривые, заменяющие действительные кривые, полученные по данным измерений.
При определении параметров по переходным функциям и частотным характеристикам ротор машины следует рассматривать как многоконтурный (пп.25-27).
Обработка результатов экспериментов может производиться графоаналитически либо с помощью ЭВМ.
(Измененная редакция, Изм. N 1).
1.5. Для всех параметров, за исключением синхронных индуктивных сопротивлений, под "насыщенным" значением параметра следует понимать его значение при номинальном напряжении якоря, а под "ненасыщенным" - значение при номинальном токе якоря.
Значение параметра при номинальном напряжении якоря должно соответствовать магнитному состоянию машины при внезапном коротком замыкании на выводах обмотки якоря, которому предшествует работа машины в режиме холостого хода с номинальным напряжением при номинальной частоте вращения.
Значение параметра при номинальном токе якоря должно соответствовать магнитному состоянию ненасыщенной машины при протекании в обмотке якоря тока с номинальным значением основной гармонической составляющей.
Для возможности сопоставления опытных параметров и постоянных времени следует указывать способ и значение тока и напряжения, при которых производилось их определение.
2. ОПРЕДЕЛЕНИЕ ЗАЗОРА МЕЖДУ СТАТОРОМ И РОТОРОМ
И ФОРМЫ ИХ ПОВЕРХНОСТИ
2.1. Определение равномерности радиального зазора между ротором и статором следует производить с помощью щупов или другого измерительного инструмента. При длине сердечника статора 300 мм и более зазор следует измерять с обоих торцов машины.
Для машин с неявновыраженными полюсами измерение необходимо производить не менее чем в трех точках, равномерно расположенных по длине окружности.
Для машин с явновыраженными полюсами измерения должны производиться под серединой каждого полюса. Допускается проведение измерений не под каждым полюсом, но не менее чем в четырех точках, равномерно расположенных по окружности.
В машинах с подшипниковыми щитами зазор необходимо измерять в 3-4 точках в зависимости от числа отверстий в щитах.
Оценку равномерности зазора следует производить по отношению максимальной разности между измеренными радиальными размерами зазоров в местах измерения к их среднему значению.
Если в подшипниковых щитах отверстия отсутствуют, а другим способом щуп или другой измерительный инструмент не может быть применен, то размер зазора следует определять как половину разности диаметров внутренней расточки статора и внешней поверхности ротора.
2.2. Определение формы внутренней поверхности статора необходимо производить измерением зазора под одним и тем же полюсом, поворачивая ротор каждый раз на одно полюсное деление.
Определение формы поверхности ротора следует производить измерением зазора в одной и той же точке статора, поворачивая ротор каждый раз на одно полюсное деление. Обе эти операции могут быть совмещены. Если многократный поворот ротора на одно полюсное деление трудно осуществим, допускается измерять зазор под всеми полюсами при двух диаметрально противоположных положениях ротора относительно статора.
3. ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ ОБМОТОК ОТНОСИТЕЛЬНО
КОРПУСА МАШИНЫ И МЕЖДУ ОБМОТКАМИ, СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ
ТЕРМОПРЕОБРАЗОВАТЕЛЕЙ СОПРОТИВЛЕНИЯ И СОПРОТИВЛЕНИЯ
ИЗОЛЯЦИИ ПОДШИПНИКОВ И УПЛОТНЕНИЙ*
________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
3.1. Измерение сопротивления изоляции обмоток относительно корпуса машины и между обмотками, сопротивления изоляции термопреобразователей сопротивления и сопротивления изоляции подшипников и уплотнений - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
4. ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЯ ОБМОТОК И ТЕРМОПРЕОБРАЗОВАТЕЛЕЙ
СОПРОТИВЛЕНИЯ ПРИ ПОСТОЯННОМ ТОКЕ В ПРАКТИЧЕСКИ
ХОЛОДНОМ ИЛИ НАГРЕТОМ СОСТОЯНИИ*
_________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
4.1. Измерение сопротивления обмоток и термопреобразователей сопротивления при постоянном токе в практически холодном или нагретом состоянии, а также температур охлаждающих сред - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4.).
5. ИСПЫТАНИЕ ПРИ ПОВЫШЕННОЙ ЧАСТОТЕ ВРАЩЕНИЯ
5.1. Испытание при повышенной частоте вращения - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
6. ИСПЫТАНИЕ ИЗОЛЯЦИИ ОБМОТОК НА ЭЛЕКТРИЧЕСКУЮ
ПРОЧНОСТЬ ОТНОСИТЕЛЬНО КОРПУСА МАШИНЫ И МЕЖДУ ОБМОТКАМИ*
_________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
6.1. Испытание изоляции обмоток на электрическую прочность относительно корпуса машины и между обмотками напряжением частотой 50 Гц, а также выпрямленным или комбинированным напряжением - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
7. ИСПЫТАНИЕ МЕЖДУВИТКОВОЙ ИЗОЛЯЦИИ ОБМОТОК
НА ЭЛЕКТРИЧЕСКУЮ ПРОЧНОСТЬ*
_________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
7.1. Испытание междувитковой изоляции обмоток на электрическую прочность - по ГОСТ 11828-86 и ГОСТ 183-74.
7.2. Выявление междувитковых замыканий в обмотке возбуждения следует производить методом измерения сопротивления обмоток при переменном токе. Измерения должны проводиться при напряжении 3 В на виток, но не более 220 В, подводимом к обмотке возбуждения. При пониженном сопротивлении изоляции обмотки возбуждения по отношению к корпусу следует применять разделительный трансформатор.
У синхронных машин с явновыраженными полюсами измерения напряжения при неизменном токе рекомендуется производить у каждого полюса в отдельности или у двух полюсов. У неявнополюсных машин с обмоткой возбуждения, расположенной на роторе, измерения следует производить на всей обмотке в целом при трех-четырех ступенях частоты вращения (включая номинальную и в неподвижном состоянии), поддерживая приложенное напряжение или ток неизменными.
Для возможности сравнения результатов последующие измерения необходимо производить при тех же значениях тока или напряжения и неизменном состоянии машины (вставленный или вынутый ротор, разомкнутая или замкнутая обмотка якоря и т.п.).
Отклонение от предыдущих результатов измерения, а также отклонение сопротивления каждого полюса от среднего значения сопротивления полюсов (для явнополюсных машин) или резкие изменения сопротивления при изменении частоты вращения могут указывать на возникновение междувитковых замыканий.
Окончательный вывод о наличии и числе устойчиво замкнутых витков может быть сделан после определения характеристики короткого замыкания и ее сравнения с ранее снятой.
Допускается применение специальных приборов и способов, обеспечивающих необходимую надежность и точность выявления витковых замыканий.
7.1, 7.2. (Измененная редакция, Изм. N 4).
8. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИКИ ХОЛОСТОГО ХОДА
И СИММЕТРИЧНОСТИ НАПРЯЖЕНИЙ
8.1. Характеристику холостого хода машины, представляющую зависимость напряжения обмотки якоря от тока возбуждения, следует определять при холостом ходе и номинальной частоте вращения в режиме генератора. Допускается определение характеристики холостого хода в режиме ненагруженного двигателя.
При определении характеристики холостого хода следует измерять ток возбуждения, линейное напряжение и частоту (или частоту вращения).
Для оценки третьей гармонической составляющей при соединении обмотки статора в звезду необходимо также измерять фазное напряжение, а при соединении в треугольник - фазный ток.
Если при определении характеристики холостого хода частота () отличается от номинальной (
), то напряжения холостого хода (
) необходимо пересчитать по измеренным значениям напряжения (
) по формуле
![]() .
.
Изменение тока возбуждения при снятии характеристики холостого хода следует производить плавно и только в одном направлении, начиная с наибольшего значения тока, равного, если возможно, номинальному току возбуждения, но не ниже значения, соответствующего 1,3 номинального напряжения испытуемой машины.
Точки, при которых производят отсчеты по приборам, должны распределяться по характеристике по возможности равномерно.
Для получения характеристики холостого хода, проходящей через начало координат, снятую характеристику необходимо сместить по оси абсцисс на величину , полученную путем экстраполяции этой характеристики до пересечения с осью абсцисс (черт.1).
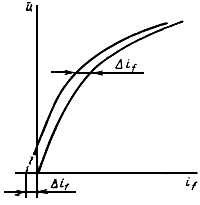
Черт.1
У синхронных машин с самовозбуждением, имеющих доступные выводы обмотки возбуждения (например, контактные кольца), характеристику холостого хода следует определять при питании обмотки возбуждения от постороннего источника.
8.1.1. Для определения характеристики холостого хода в режиме генератора синхронную машину необходимо привести во вращение при помощи первичного двигателя.
При уменьшении тока возбуждения до нуля следует измерять остаточное напряжение, которое рекомендуется измерять непосредственно приборами без трансформаторов напряжения.
8.1.2. Определение характеристики холостого хода в режиме ненагруженного двигателя следует производить при питании испытуемой машины переменным током от источника, напряжение которого можно плавно изменять от значения не менее 1,3 номинального напряжения испытуемой машины до минимально возможного.
Характеристика холостого хода в режиме двигателя должна определяться при коэффициенте мощности, равном единице, для чего при каждом значении напряжения измеряют ток возбуждения, соответствующий минимальному току в обмотке якоря. При определении характеристики холостого хода в режиме двигателя, кроме перечисленных в п.8.1 параметров, необходимо измерять также ток якоря и потребляемую мощность.
8.1.3. Определение характеристики холостого хода допускается производить на выбеге машины, если снижение частоты вращения не превышает 0,04 номинальной частоты вращения в секунду.
При снижении частоты вращения испытуемой машины более 0,02 номинальной частоты вращения в секунду, возбуждение следует осуществлять от отдельного источника, обеспечивающего устойчивое возбуждение.
Непосредственно перед отключением машины от сети необходимо установить ток возбуждения, соответствующий, если возможно, номинальному, но не ниже значения тока, при котором напряжение испытуемой машины составляет 1,3 номинального напряжения в режиме холостого хода.
После отключения машины ток возбуждения следует снижать ступенями. На каждой ступени необходимо одновременно измерять или регистрировать значения параметров, указанных в п.8.1.
8.1.4. При испытаниях турбо- и гидрогенераторов, работающих в блоке с трансформатором, на месте установки допускается определение характеристики холостого хода генератора по зависимости
![]() ,
,
где - линейное напряжение на зажимах генератора, работающего на ненагруженный трансформатор блока, В;
- ток возбуждения генератора, А.
Указанная зависимость должна быть определена экспериментально, при этом изменение тока возбуждения должно производиться, начиная с наибольшего значения, соответствующего 1,15 номинального напряжения испытуемой машины (ограничивается трансформатором). В остальном так же, как и при непосредственном снятии характеристики холостого хода.
Напряжение холостого хода генератора , соответствующее току возбуждения
, определяют по формуле
![]() ,
,
где - синхронное индуктивное сопротивление генератора, Ом;
- ток холостого хода трансформатора при напряжении
, А;
![]() ,
,
где - ток холостого хода трансформатора, о.е;
- линейный номинальный ток обмотки трансформатора, подключаемый к генератору, А;
- линейное номинальное напряжение обмотки трансформатора, подключаемой к генератору В.
При нагрузке генератора на несколько параллельно включенных трансформаторов ток определяют как сумму токов холостого хода этих трансформаторов.
Характеристика холостого хода ![]() , полученная описанным выше методом, пересчитывается при необходимости на номинальную частоту и приводится к началу координат как непосредственно определенная характеристика холостого хода.
, полученная описанным выше методом, пересчитывается при необходимости на номинальную частоту и приводится к началу координат как непосредственно определенная характеристика холостого хода.
(Введен дополнительно, Изм. N 3. Измененная редакция, Изм. N 4).
8.2. Определение симметричности напряжений испытуемой машины следует производить в режиме холостого хода генератора при номинальном напряжении. Допускается определение симметричности напряжений производить при любом значении напряжения (вплоть до остаточного).
Для определения симметричности напряжений необходимо одновременно измерять все три линейных напряжения приборами одного класса.
Допускается производить измерение двумя вольтметрами, один из которых следует включать поочередно между каждой парой линейных выводов, а другой остается неизменно подключенным к любой паре линейных выводов для контроля неизменности напряжения.
Оценка симметричности должна производиться по отношению разности между наибольшим и наименьшим измеренными линейными напряжениями к среднему его значению.
9. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИКИ ТРЕХФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ
9.1. Характеристику трехфазного короткого замыкания машины, представляющую зависимость тока в обмотке якоря от тока возбуждения, следует определять в режиме генератора при установившемся трехфазном коротком замыкании.
Замыкание фаз накоротко должно производиться как можно ближе к выводам машины.
Точное поддержание частоты вращения на уровне номинальной при определении характеристики короткого замыкания не требуется и поправок на отклонение частоты вращения от номинальной (при условии, что частота не ниже 0,2 номинальной) в результаты испытаний не вносят.
Для определения характеристики короткого замыкания измеряют линейный ток обмотки якоря и ток возбуждения. У машин с соединением фаз обмотки в треугольник при выведенных началах и концах всех фаз следует измерять также фазный ток. Оценку третьей гармонической составляющей тока в этом случае производят по формуле п.10.
При определении характеристики короткого замыкания один из отсчетов должен быть произведен при токе в обмотке якоря, близком к номинальному.
Для получения характеристики короткого замыкания, проходящей через начало координат, имеющуюся характеристику смещают по оси абсцисс на величину , аналогично п.8.1.
9.2. Определение характеристики короткого замыкания допускается производить на выбеге, если снижение частоты вращения в секунду не превышает 0,1 номинальной.
При снижении частоты вращения испытуемой машины более 0,04 номинальной в секунду возбуждение следует осуществлять от отдельного источника, обеспечивающего устойчивое возбуждение.
Для синхронных машин, работающих по схеме самовозбуждения и имеющих доступные выводы обмотки возбуждения, определение характеристики короткого замыкания следует производить при питании обмотки возбуждения от постороннего источника.
9.3. При испытаниях турбо- и гидрогенераторов, работающих в блоке с трансформатором, на месте установки допускается определение характеристики короткого замыкания по зависимости
![]() ,
,
где - линейный ток генератора, включенного на замкнутый накоротко трансформатор блока, А;
- ток возбуждения генератора, А.
Указанная зависимость должна быть определена экспериментально, аналогично непосредственному снятию характеристики трехфазного короткого замыкания.
Ток возбуждения генератора , соответствующий току генератора
в режиме симметричного короткого замыкания генератора, определяют по формуле
![]() ,
,
где - ток возбуждения, соответствующий по характеристике холостого хода генератора напряжению
![]() на замкнутом накоротко трансформаторе при токе
на замкнутом накоротко трансформаторе при токе , А.
Сопротивление короткого замыкания трансформатора со стороны обмотки, подключаемой к генератору, определяют по паспортным данным трансформатора
![]() , Ом,
, Ом,
где - напряжение короткого замыкания трансформатора, о.е.;
- номинальное линейное напряжение обмотки трансформатора, подключаемой к генератору, В;
- номинальный линейный ток обмотки трансформатора, подключаемой к генератору, А.
Полученная характеристика короткого замыкания генератора приводится к началу координат как непосредственно определенная характеристика короткого замыкания.
(Введен дополнительно, Изм. N 3).
10. ОПРЕДЕЛЕНИЕ ТОКА ТРЕТЬЕЙ ГАРМОНИЧЕСКОЙ
10.1. Определение третьей гармонической составляющей тока якоря при соединении обмотки в треугольник должно производиться при работе машины с номинальными значениями мощности и напряжения.
При этом измеряют линейный () и фазный (
) токи якоря.
Значение третьей гармонической составляющей тока в обмотке () следует вычислять по формуле
 .
.
11. ИЗМЕРЕНИЕ ТОКА ВОЗБУЖДЕНИЯ НЕНАГРУЖЕННОЙ СИНХРОННОЙ МАШИНЫ
В РЕЖИМЕ ПЕРЕВОЗБУЖДЕНИЯ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ
И НОМИНАЛЬНОМ ТОКЕ ЯКОРЯ И ОПРЕДЕЛЕНИЕ
U-ОБРАЗНОЙ ХАРАКТЕРИСТИКИ
11.1. Ток возбуждения, соответствующий номинальным напряжению и току якоря при коэффициенте мощности, равном нулю, в режиме перевозбуждения следует определять при работе машины в режиме генератора или двигателя. В режиме генератора активная мощность, отдаваемая в сеть, должна быть равна нулю. В режиме двигателя нагрузка на валу должна быть равна нулю.
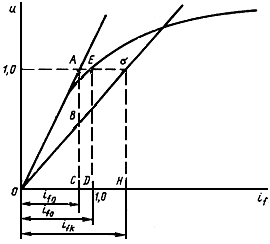
Если напряжение и ток при испытании отличаются от номинальных не более чем на ±15%, допускается применять графический метод определения тока возбуждения, соответствующего номинальному напряжению и номинальному току. Для этого на график, на котором нанесена характеристика холостого хода испытуемой машины необходимо нанести точку, соответствующую измеренным значениям напряжения и току возбуждения при коэффициенте мощности, равном нулю, и измеренном токе якоря (точка С на черт.2).
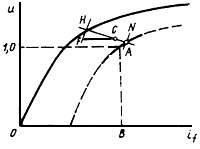
Черт.2
Затем из точки параллельно оси абсцисс в сторону характеристики холостого хода следует отложить отрезок
, равный току возбуждения, соответствующему по характеристике установившегося короткого замыкания току якоря (
), измеренному при определении точки
. Через точку
проводят прямую параллельно начальной части характеристики холостого хода до пересечения с последней в точке
. После этого через точки
и
проводят прямую и из точки
откладывают на ней отрезок
, определяемый из выражения
![]() ,
,
где - номинальный ток якоря.
Затем характеристику холостого хода переносят параллельно самой себе вправо и вниз на расстояние так, чтобы точка
соответствовала точке
.
Полученная кривая представляет нагрузочную характеристику машины при коэффициенте мощности, равном нулю, в режиме перевозбуждения. На полученной кривой находят точку А, соответствующую номинальному напряжению. Абсцисса этой точки определяет ток возбуждения, соответствующий номинальному напряжению и току якоря в режиме перевозбуждения при коэффициенте мощности, равном нулю.
11.2. -образную характеристику, представляющую зависимость тока в обмотке якоря от тока возбуждения, следует определять при номинальном напряжении на зажимах и неизменной активной мощности, в частности, при активной мощности, близкой к нулю.
Для определения -образной характеристики синхронную машину подключают к сети или к отдельному генератору для работы с номинальным напряжением и частотой в режиме двигателя или генератора (при наличии первичного двигателя).
При испытании измеряют ток, напряжение, мощность и частоту в цепи якоря и ток возбуждения. Характеристика должна определяться как при перевозбуждении машины, так и, по возможности, при недовозбуждении.
В процессе определения -образной характеристики рекомендуется определять также следующие точки: при минимальном значении тока якоря; при токе возбуждения, равном нулю (в режиме недовозбуждения), при отсутствии активной нагрузки, и при токе якоря, равном номинальному (в режиме перевозбуждения).
На месте установки машины снятие -образных характеристик в зоне недовозбуждения рекомендуется проводить при включенном АРВ (при его наличии).
(Измененная редакция, Изм. N 4).
12. ОПРЕДЕЛЕНИЕ НОМИНАЛЬНОГО ТОКА ВОЗБУЖДЕНИЯ, НОМИНАЛЬНОГО
ИЗМЕНЕНИЯ НАПРЯЖЕНИЯ И РЕГУЛИРОВОЧНОЙ ХАРАКТЕРИСТИКИ
12.1. Номинальный ток возбуждения следует определять методом непосредственной нагрузки. Допускается определение номинального тока возбуждения методом графического построения.
12.1.1. Определение номинального тока возбуждения методом непосредственной нагрузки должно производиться при работе синхронной машины в сети неизменного напряжения в режиме генератора, синхронного компенсатора или двигателя (в зависимости от назначения машины) с номинальными напряжением, мощностью, коэффициентом мощности и частотой. Допускается определение номинального тока возбуждения генератора и синхронного компенсатора производить также при работе на регулируемую нагрузку.
Возбуждение синхронных машин мощностью менее 10 МВт с питанием возбудительных устройств от дополнительных обмоток и встроенных компаундированных трансформаторов испытуемой машины должно осуществляться от собственной системы возбуждения.
12.1.2. Определение номинального тока возбуждения методом графического построения следует производить с использованием характеристик холостого хода и установившегося трехфазного короткого замыкания и расчетного индуктивного сопротивления .
По оси абсцисс откладывают вектор номинального тока якоря испытуемой машины , а под углом
к вектору тока - вектор номинального напряжения
(черт.3).
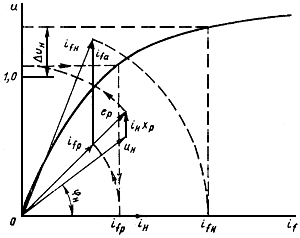
Черт.3
Из конца вектора напряжения перпендикулярно к току следует отложить вектор падения напряжения
.
Падением напряжения в активном сопротивлении обмотки якоря для машин мощностью 20 кВ·А и выше можно пренебречь. При необходимости, его учитывают, отложив вектор падения напряжения в активном сопротивлении прямой последовательности обмотки якоря из конца вектора напряжения параллельно току якоря. На диаграмме этот вектор следует откладывать для генераторов по направлению вектора тока, для двигателей - в обратном направлении.
Геометрическая сумма векторов номинального напряжения и падения напряжения в индуктивном сопротивлении дает вектор электродвижущей силы (э.д.с.)
. Вектор тока возбуждения
, создающего эту э.д.с., необходимо определять по характеристике холостого хода и откладывать из начала координат по направлению вектора
.
По характеристике короткого замыкания определяют составляющую тока возбуждения , компенсирующую реакцию якоря при токе короткого замыкания, равном номинальному току, и откладывают ее из конца вектора
вверх, перпендикулярно вектору тока якоря.
Составляющую тока возбуждения , компенсирующую реакцию якоря при токе короткого замыкания, равном номинальному, следует вычислять как разность между током возбуждения
, соответствующим номинальному току якоря, определенным по характеристике короткого замыкания, и током возбуждения
, соответствующим падению напряжения в индуктивном сопротивлении
при номинальном токе якоря, определенном по характеристике холостого хода.
Геометрическая сумма двух найденных векторов тока возбуждения дает вектор номинального тока возбуждения .
При графическом определении номинального тока возбуждения допускается также и другое взаимное расположение отдельных частей диаграммы.
Для синхронных компенсаторов номинальный ток возбуждения может быть также определен методом графического построения по п.11.1.
(Измененная редакция, Изм. N
1, 4).
12.2. Номинальное изменение напряжения в относительных единицах () следует вычислять по формуле
![]() ,
,
где - напряжение холостого хода, соответствующее номинальному току возбуждения
и определяемое непосредственно из испытания или графически, В;
- номинальное напряжение, В.
Номинальное изменение напряжения может быть выражено в процентах.
(Измененная редакция, Изм. N 4).
12.3. Регулировочную характеристику, представляющую зависимость тока возбуждения от тока якоря, следует определять при неизменных напряжении, коэффициенте мощности и частоте вращения методом непосредственной нагрузки. Допускается определение регулировочной характеристики методом графического построения.
Определение регулировочной характеристики методом непосредственной нагрузки необходимо производить при работе синхронной машины в сети неизменного напряжения в режиме генератора, синхронного компенсатора или двигателя (в зависимости от основного назначения).
Определение регулировочной характеристики генератора и синхронного компенсатора может производиться также при работе на регулируемую нагрузку.
При испытании следует измерять в цепи якоря напряжение, ток, мощность, коэффициент мощности, частоту, а в цепи возбуждения - ток. Один из отсчетов следует брать при токе якоря, близком к номинальному.
Для получения точек регулировочной характеристики методом графического построения необходимо определить токи возбуждения (при заданных напряжении, коэффициенте мощности и частоте вращения) для нескольких значений тока якоря (в пределах от 0 до
) по п.12.1.2.
13. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ИСКАЖЕНИЯ СИНУСОИДАЛЬНОСТИ КРИВОЙ
НАПРЯЖЕНИЯ И КОЭФФИЦИЕНТА ТЕЛЕФОННЫХ ГАРМОНИК
13.1. Измерение коэффициента искажения синусоидальности кривой напряжения () в процентах следует производить с помощью измерителя коэффициента нелинейных искажений либо рассчитывать по амплитудам отдельных гармонических составляющих (измеренных непосредственно или полученных по данным разложения кривой напряжения) по формуле
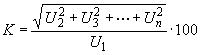
где ,
...
- действующие или амплитудные значения напряжений отдельных гармоник. Измерения должны производиться при работе машины в генераторном режиме при холостом ходе и номинальном напряжении. Линейное напряжение машины подводят к соответствующему прибору (анализатору гармонических составляющих, измерителю коэффициента нелинейных искажений или осциллографу). Допускается подключение приборов через делитель напряжения или через трансформатор напряжения. Для машин с номинальной частотой до 100 Гц измерение производят при частотах гармоник до 5000 Гц.
13.2. Коэффициент телефонных гармоник () в процентах следует определять при работе машины с основным возбудителем в режиме холостого хода с номинальными напряжением и частотой с помощью специального прибора или анализатора гармонических составляющих напряжения. При измерении допускается использование трансформаторов напряжения класса не ниже 0,5. Величину
рассчитывают по формуле:
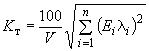 ,
,
где - число гармонических составляющих линейного напряжения, частоты которых лежат в пределах от номинальной до 5000 Гц;
- действующее значение
-ой гармонической составляющей линейного напряжения, В;
- действующее значение линейного напряжения машины, В;
- весовой коэффициент, выбираемый по таблице в зависимости от частоты
-ой гармонической составляющей линейного напряжения.
Весовые коэффициенты
Частота, Гц | Весовой коэффициент |
16,66 | 0,00000117 |
50 | 0,0000444 |
100 | 0,00112 |
150 | 0,00665 |
200 | 0,0223 |
250 | 0,0556 |
300 | 0,111 |
350 | 0,165 |
400 | 0,242 |
450 | 0,327 |
500 | 0,414 |
550 | 0,505 |
600 | 0,595 |
650 | 0,691 |
700 | 0,790 |
750 | 0,895 |
800 | 1,0 |
850 | 1,1 |
900 | 1,21 |
950 | 1,32 |
1000 | 1,40 |
1050 | 1,46 |
1100 | 1,47 |
1150 | 1,49 |
1200 | 1,50 |
1250 | 1,53 |
1300 | 1,55 |
1350 | 1,57 |
1400 | 1,58 |
1450 | 1,60 |
1500 | 1,61 |
1550 | 1,63 |
1600 | 1,65 |
1650 | 1,66 |
1700 | 1,68 |
1750 | 1,70 |
1800 | 1,71 |
1850 | 1,72 |
1900 | 1,74 |
1950 | 1,75 |
2000 | 1,77 |
2050 | 1,79 |
2100 | 1,81 |
2150 | 1,82 |
2200 | 1,84 |
2250 | 1,86 |
2300 | 1,87 |
2350 | 1,89 |
2400 | 1,90 |
2450 | 1,91 |
2500 | 1,93 |
2550 | 1,93 |
2600 | 1,94 |
2650 | 1,95 |
2700 | 1,96 |
2750 | 1,96 |
2800 | 1,97 |
2850 | 1,97 |
2900 | 1,97 |
2950 | 1,97 |
3000 | 1,97 |
3100 | 1,94 |
3200 | 1,89 |
3300 | 1,83 |
3400 | 1,75 |
3500 | 1,65 |
3600 | 1,51 |
3700 | 1,35 |
3800 | 1,19 |
3900 | 1,04 |
4000 | 0,890 |
4100 | 0,740 |
4200 | 0,610 |
4300 | 0,496 |
4400 | 0,398 |
4500 | 0,316 |
4600 | 0,252 |
4700 | 0,199 |
4800 | 0,158 |
4900 | 0,125 |
5000 | 0,100 |
(Измененная редакция, Изм. N 1, 4).
14. ИСПЫТАНИЕ ПРИ КРАТКОВРЕМЕННОЙ ПЕРЕГРУЗКЕ
ПО ТОКУ ИЛИ ПО ВРАЩАЮЩЕМУ МОМЕНТУ*
_________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
14.1. Испытание на кратковременную перегрузку по току якоря или по вращающему моменту - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
15. ОПРЕДЕЛЕНИЕ ПОТЕРЬ И КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ
15.1. Определение потерь и к.п.д. синхронных машин - по ГОСТ 25941-83.
(Измененная редакция, Изм. N 4).
16. ИСПЫТАНИЕ НА НАГРЕВАНИЕ
16.1. Испытание на нагревание машин, а также измерение температуры частей машины и охлаждающей среды в процессе испытания и после их окончания - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
16.1.1, 16.2. (Исключены, Изм. N 2).
16.2.1-16.2.4. (Исключены, Изм. N 4).
17. ИСПЫТАНИЕ НА ВНЕЗАПНОЕ ТРЕХФАЗНОЕ КОРОТКОЕ ЗАМЫКАНИЕ
17.1. Опыт внезапного трехфазного короткого замыкания проводят для испытания механической прочности машины, а также для определения электромагнитных параметров.
Замыкание накоротко обмотки якоря должно производиться при работе машины в режиме холостого хода с заданным напряжением при номинальной частоте вращения и отключенном автоматическом регуляторе возбуждения (АРВ).
Если для возбуждения машины применена электромашинная или независимая система возбуждения с управляемыми вентилями, то опыт внезапного короткого замыкания может производиться при возбуждении от собственного возбудителя, возбуждение которого осуществляется от независимого источника. При наличии последовательной обмотки возбуждения электромашинного возбудителя ее необходимо исключить. АРВ вспомогательного генератора системы независимого возбуждения должен быть оставлен в работе.
При бесщеточной системе возбуждения опыт внезапного короткого замыкания проводят при работе возбудителя без АРВ.
Если в качестве основной системы возбуждения применена система самовозбуждения с управляемыми вентилями или высокочастотная система возбуждения с неуправляемыми выпрямителями, то для проведения опыта следует использовать электромашинный возбудитель. При этом его номинальный ток должен в два или более раза превышать ток возбуждения холостого хода испытуемой машины.
Возбудитель в этом случае должен иметь независимое возбуждение, а его последовательная обмотка возбуждения, если она имеется, должна быть отключена.
Если указанные требования не могут быть выдержаны, то для проверки вибрации, механических напряжений и деформации допускается одновременно с замыканием накоротко обмотки якоря производить замыкание накоротко обмотки возбуждения испытуемой машины.
(Измененная редакция, Изм. N 4)
17.1.1. Для определения соответствия машины требованиям механической прочности следует производить осмотр ее до и после внезапного короткого замыкания и, в частности, осмотр лобовых частей обмотки якоря и их креплений. После опытов внезапного короткого замыкания необходимо произвести испытание электрической прочности изоляции обмотки якоря относительно корпуса (п.6). На машинах мощностью свыше 75000 кВ·А до и после опыта короткого замыкания необходимо определять частотные вибрационные характеристики обмоток, а также производить измерения их вибрации в режиме холостого хода при номинальных напряжении и частоте и в режиме короткого замыкания при номинальном токе якоря. В процессе опыта внезапного короткого замыкания рекомендуется измерять вибрации и деформации основных конструктивных узлов машины.
После установки измерительных датчиков на обмотке, последнюю следует испытывать по отношению к корпусу выпрямленным напряжением не ниже 1,5 номинального или номинальным напряжением частоты 50 Гц при заземленных датчиках.
Для проверки правильности работы установленной аппаратуры опыт внезапного короткого замыкания первоначально необходимо производить при напряжении не выше 0,3 номинального, с осциллографированием показаний тензометров и вибродатчиков, а также токов всех трех фаз.
(Измененная редакция, Изм. N 1, 4).
17.1.2. Если опыт внезапного короткого замыкания используется для определения индуктивных сопротивлений, переходных функций и постоянных времени, то замыкание трех фаз должно происходить практически одновременно с расхождением по времени не более 15 электрических градусов. Если апериодическую составляющую тока якоря и переходную функцию (п.25) определять не требуется указанное значение может быть превышено.
Для определения параметров необходимо осциллографировать токи во всех фазах якоря и ток в цепи возбуждения.
Запись переходного процесса следует продолжать в течение времени не менее чем 2 секунд, при этом установившиеся значения должны быть измерены с помощью приборов и записаны на осциллографе.
Для измерения токов короткого замыкания необходимо применять безындукционные шунты или измерительные трансформаторы.
Трансформаторы тока с магнитным сердечником следует выбирать так, чтобы наибольшее возможное значение ударного тока короткого замыкания лежало на прямолинейной части характеристики трансформатора. Рекомендуется применение трансформаторов с транспонированной вторичной обмоткой, обеспечивающей компенсацию влияния внешних полей. Перед опытом магнитные сердечники трансформаторов тока должны быть размагничены.
Общее сопротивление измерительной аппаратуры и соединительных проводов, включаемых во вторичную цепь трансформаторов тока, не должно превышать установленного для них номинального значения.
Допускается применение воздушных трансформаторов тока, которые подключают к осциллографу через интегрирующие усилители. В тех случаях, когда требуется определять только ударный ток и периодическую составляющую, допускается применять интегрирующие осциллографические гальванометры.
Непосредственно перед коротким замыканием необходимо измерять напряжение на выводах машины, ток возбуждения и температуру обмотки возбуждения.
Для получения параметров, соответствующих ненасыщенному состоянию машины, опыт внезапного короткого замыкания следует проводить при нескольких значениях напряжения в пределах 0,1-0,4 номинального. Для каждого напряжения определяют параметры и затем строят зависимости их изменения от начальных значений переходного или сверхпереходного токов. Ненасыщенные значения параметров следует определять по этим зависимостям для токов, равных, номинальному току якоря.
Значения параметров, соответствующие насыщенному состоянию машины, определяют в том случае, когда опыт внезапного короткого замыкания производят при номинальном напряжении на выводах машины. Если опыт при номинальном напряжении не может быть выполнен, то проводят три опыта при напряжениях 0,3; 0,5; 0,7 номинального, определяют параметры для каждого опыта, строят зависимости параметров от напряжения перед опытом и экстраполяцией определяют насыщенные значения параметров, соответствующие номинальному напряжению.
17.1.3. По осциллограмме токов внезапного трехфазного короткого замыкания находят зависимости изменения во времени апериодической и периодической составляющих тока в каждой фазе якоря, которые определяют соответственно как алгебраические полусуммы и алгебраические полуразности ординат верхней и нижней огибающих фазного тока якоря при коротком замыкании.
Периодическую составляющую тока якоря при коротком замыкании следует определять как среднее арифметическое периодических составляющих токов трех фаз.
Для определения переходной () и сверхпереходной (
) составляющих тока из кривой изменения периодической составляющей тока якоря вычитают амплитуду установившегося тока короткого замыкания
(
). Полученную разность, представляющую сумму
![]() строят на графике в полулогарифмических координатах.
строят на графике в полулогарифмических координатах.
Начальное значение переходной составляющей тока короткого замыкания (0) следует определять следующим образом:
а) если построенная кривая, за исключением начальной части, представляет собой прямую линию (соответствует экспоненте), то, экстраполируя ее на ось ординат, определяют начальное значение (0) переходной составляющей тока короткого замыкания (черт.4);
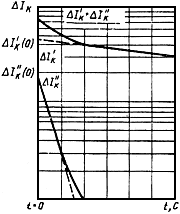
Черт.4
б) если кривая не имеет прямолинейного участка, то измеряют амплитуду тока (черт.5), соответствующую времени
, где
принимают равным десяти периодам тока или времени, в течение которого сверхпереходная составляющая становится незначительной. Определяют время
, в течение которого ток
затухает до значения
![]() .
.
Постоянную времени определяют как разность
-
в секундах.
Начальное значение переходной составляющей (0) определяют экстраполяцией на ось ординат прямой, проведенной через точки, соответствующие токам
и
(черт.5).
Черт.5
Сверхпереходную составляющую тока короткого замыкания следует определять как разность между кривой (+
) и прямой, определяющей значение
. Изменение сверхпереходной составляющей тока во времени также строят в полулогарифмических координатах (черт.4).
Экстраполяцией прямолинейной части полученной кривой на ось ординат определяют начальное значение сверх переходной составляющей тока короткого замыкания (0).
(Измененная редакция, Изм. N 1, 2).
17.1.4. Апериодические составляющие токов всех фаз следует строить в зависимости от времени в полулогарифмических координатах. Экстраполяция этих кривых на момент возникновения короткого замыкания дает начальные значения соответствующих токов.
Для нахождения наибольшего возможного значения апериодической составляющей тока якоря полученные экстраполяцией начальные значения апериодических составляющих токов отдельных фаз якоря строят в виде векторов, выходящих из одной точки. Вначале откладывают наибольший из векторов , а затем под углом 60° к нему вправо и влево cтроят другие векторы
и
. Из конца каждого вектора восстанавливают перпендикуляр к нему.
Длина вектора, проведенного из точки 0 в центр тяжести треугольника, образованного пересечением этих перпендикуляров, определяет наибольшую возможную апериодическую составляющую ![]() , которая равна начальному значению амплитуды периодической составляющей (черт.6).
, которая равна начальному значению амплитуды периодической составляющей (черт.6).
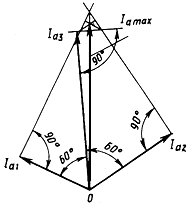
Черт.6
Наибольшее возможное значение апериодической составляющей тока может быть определено аналитически (в относительных или физических единицах) по формуле
![]() ,
,
где - начальное наибольшее абсолютное значение апериодической составляющей тока, А;
- начальное абсолютное значение апериодической составляющей тока в любой из двух других фаз, А.
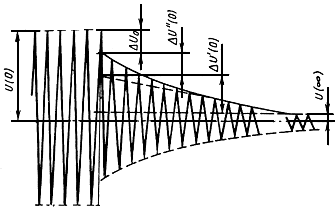
17.1.5. По осциллограмме тока в цепи возбуждения при внезапном коротком замыкании обмотки якоря следует определять зависимость периодической составляющей тока от времени как полуразность ординат верхней и нижней огибающих осциллограммы тока в обмотке возбуждения и строить ее в полулогарифмических координатах. Начальное значение тока периодической составляющей определяют экстраполяцией полученной кривой на момент короткого замыкания. В случае если затухание периодической составляющей тока в цепи возбуждения отличается от экспоненциального закона, его начальное значение следует определять экстраполяцией на момент короткого замыкания касательной к основной части кривой.
17.1.6. Наибольший возможный ударный ток внезапного короткого замыкания следует определять как сумму периодической и апериодической составляющих через 0,5 периода после момента короткого замыкания.
Значение периодической составляющей для этого момента времени определяют как сумму установившегося тока внезапного короткого замыкания, переходной и сверхпереходной составляющих этого тока.
Последние две составляющие необходимо брать из графика (черт.4) для соответствующего момента времени.
Значение апериодической составляющей через 0,5 периода после момента короткого замыкания () определяют с учетом затухания по формуле
![]() ,
,
где - наибольшее возможное значение апериодической составляющей тока внезапного короткого замыкания, А;
- основание натуральных логарифмов;
- постоянная времени затухания апериодической составляющей тока (п.24.6), с;
- номинальная частота, Гц.
Если масштаб тока якоря выражен через действующее значение тока, то для определения наибольшего возможного тока внезапного короткого замыкания найденную сумму периодической и апериодической составляющих следует умножать на .
18. ОПРЕДЕЛЕНИЕ ОТНОШЕНИЯ КОРОТКОГО ЗАМЫКАНИЯ
И СИНХРОННЫХ ИНДУКТИВНЫХ СОПРОТИВЛЕНИЙ
В формулах для определения синхронных индуктивных сопротивлений считают, что активные сопротивления прямой последовательности незначительны и ими, если нет других указаний, можно пренебречь. В тех случаях, когда активное сопротивление прямой последовательности составляет 0,2 или выше от измеряемого значения индуктивного сопротивления, формулы следует рассматривать как приближенные.
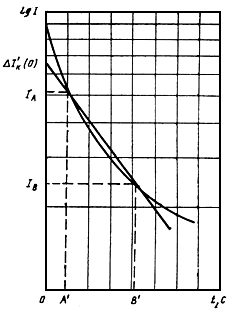
18.1. Отношение короткого замыкания следует определять как частное от деления тока возбуждения, соответствующего номинальному напряжению по характеристике холостого хода, на ток возбуждения, соответствующий номинальному току по характеристике установившегося трехфазного короткого замыкания (черт.7),
 .
.
Черт.7
18.2. Синхронное индуктивное сопротивление по продольной оси () следует определять по характеристикам холостого хода и короткого замыкания или из опыта с поворотом фазы.
18.2.1. Синхронное индуктивное сопротивление по продольной оси определяют как частное от деления напряжения холостого хода, взятого по прямолинейной части характеристики холостого хода (или ее продолжению) при некотором токе возбуждения, на ток симметричного короткого замыкания, получаемый по характеристике короткого замыкания при том же токе возбуждения (черт.7),
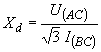 ;
;  .
.
Характеристики холостого хода и короткого замыкания должны быть приведены к началу координат.
Полученное таким образом значение является ненасыщенным.
18.2.2. Определение синхронных индуктивных сопротивлений из опыта с поворотом фазы может быть произведено при наличии источника переменного напряжения соответствующей частоты достаточной мощности с регулируемой фазой. Для этого невозбужденную испытуемую машину приводят во вращение синхронным двигателем при питании ее обмотки якоря от источника той же частоты, что и двигатель. Источник с регулируемой фазой должен быть включен между сетью и испытуемой машиной, либо между сетью и ее приводным двигателем. Надобность в регулировании фазы напряжения источника отпадает, если приводной двигатель имеет возбуждение по двум взаимно перпендикулярным осям.
Во всех случаях медленным поворотом фазы напряжения должны быть найдены положения, при которых ток якоря испытуемой машины имеет наименьшее и наибольшее значения при соответственно наибольшем и наименьшем значениях напряжения. Если при испытании производится измерение активной мощности, то снятие показаний приборов следует производить при минимальном ее значении.
Синхронное индуктивное сопротивление по продольной оси определяют при наименьшем токе якоря () и наибольшем напряжении якоря (
) по формуле
![]() ;
; ![]() .
.
18.3. Определение синхронного индуктивного сопротивления по поперечной оси машины () следует производить из опыта с поворотом фазы. Допускается определение
из опытов: отрицательного возбуждения, малого скольжения и нагрузки с измерением угла между э.д.с. машины и напряжением на выводах.
18.3.1. Определение синхронного индуктивного сопротивления по поперечной оси из опыта с поворотом фазы производят по п.18.2.2 при наибольшем токе якоря и наименьшем напряжении якоря
.
При этом
![]() ;
; ![]() .
.
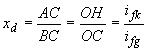
18.3.2. Определение синхронного индуктивного сопротивления по поперечной оси методом отрицательного возбуждения следует производить на машинах с механическими потерями меньше 1%. При этом машина должна работать параллельно с сетью без активной нагрузки при напряжении, близком к номинальному. Во время опыта следует уменьшать ток возбуждения до нуля, изменять направление тока и плавно увеличивать его до выпадения машины из синхронизма.
Во время опыта следует измерять напряжение и ток якоря и ток возбуждения вплоть до момента выпадения машины из синхронизма. Определение производят по формуле
![]() ;
; ![]() .
.
где - абсолютное значение э.д.с., определяемое по спрямленной характеристике холостого хода, проведенной через точку, соответствующую напряжению
, для тока возбуждения
(черт.8);
и
- напряжение якоря и ток возбуждения непосредственно перед нарушением синхронизма;
- синхронное индуктивное сопротивление по продольной оси, определенное по той же спрямленной характеристике.
Черт.8
Если при проведении опыта определен ток якоря непосредственно перед нарушением синхронизма (), то
подсчитывают по формуле
![]() ;
; ![]() .
.
(Измененная редакция, Изм. N 1).
18.3.3. Определение синхронного индуктивного сопротивления по поперечной оси методом малого скольжения следует производить при питании обмотки якоря машины, работающей с малым скольжением, от источника симметричного напряжения, равного от 0,01 до 0,2 . При этом напряжение должно быть таким, чтобы машина не втягивалась в синхронизм. Обмотка возбуждения должна быть разомкнута, ротор необходимо вращать первичным двигателем со скольжением не более 0,0005 для машин с
>3 с и не более 0,002 - для машин с
<3 с с тем, чтобы практически исключить влияние на полученный результат токов, наведенных при асинхронном режиме в успокоительных контурах.
В момент включения или отключения источника питания обмотки якоря обмотка возбуждения должна замыкаться накоротко или на сопротивление во избежание ее возможного повреждения.
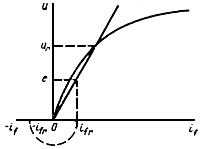
При проведении опыта измеряют по приборам или записывают на осциллограмму ток и напряжение якоря, напряжение на обмотке возбуждения (черт.9), скольжение и по возможности угол .
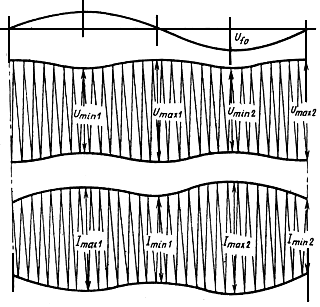
Черт.9
Если остаточное напряжение машины более 0,3 приложенного напряжения, то сердечник индуктора машины перед проведением опыта следует размагнитить.
подсчитывают по измеренным во время опыта току и напряжению якоря при максимальном напряжении (
) на обмотке возбуждения (при этом угол
равен 90°) по формуле
![]() ;
; ![]() .
.
Примечание. Если положение не совпадает с
,то при расчете
следует брать за основу
и напряжение при этом токе.
Если при проведении опыта остаточное напряжение машины () находится в пределах 0,1-0,3 приложенного напряжения, то значение тока
должно быть определено по формуле
 ;
;  ,
,
где - полусумма двух последовательных максимумов огибающей кривой тока (черт.9), А;
- синхронное индуктивное сопротивление по продольной оси, определенное по п.18.2, Ом.
Значение определяют как среднее арифметическое двух последовательных минимумов огибающей кривой напряжения (черт.9).
В целях контроля полученных результатов одновременно из этого же опыта следует определять по результатам измерения напряжения и тока в момент, когда напряжение на разомкнутой обмотке возбуждения равно нулю. При этом
![]() ;
; ![]() .
.
При значении остаточного напряжения 0,1-0,3 приложенного за принимают полусумму двух последовательных минимумов по огибающей кривой тока, а за
- полусумму двух последовательных максимумов по огибающей кривой напряжения (черт.9).
Опыт необходимо повторить при нескольких значениях скольжения и экстраполировать полученные значения и
к скольжению, равному нулю.
Результаты измерения из опыта малого скольжения считают правильными в том случае, когда полученное из этого же опыта значение
совпадает с его значением, полученным в соответствии с п.18.2.1 с погрешностью до 2-3%. Значения
, полученные из опыта малого скольжения, соответствуют ненасыщенному состоянию машины.
(Измененная редакция, Изм. N 1, 4).
18.3.4. Определение синхронного индуктивного сопротивления по поперечной оси методом нагрузки с измерением угла между э.д.с. машины и напряжением на выводах следует производить при работе испытуемой машины параллельно с сетью или на выделенную нагрузку при номинальной частоте.
Активная нагрузка машины должна быть не менее 0,5 номинальной при коэффициенте мощности, близком к номинальному.
При проведении опыта необходимо измерять напряжение , ток якоря
, а также определять угол
между напряжением и током и угол
(внутренний угол между векторами напряжения на выводах и э.д.с. машины). Угол
может быть измерен стробоскопическим или каким-либо другим методом.
Значение следует рассчитывать по формуле
![]() ;
; ![]() .
.
В тех случаях, когда значением активного сопротивления пренебречь нельзя, значение рассчитывают по формуле
 ;
; ![]() ,
,
где ![]() - продольная составляющая тока якоря, А;
- продольная составляющая тока якоря, А;
![]() - поперечная составляющая тока якоря, А;
- поперечная составляющая тока якоря, А;
- активное сопротивление фазы обмотки якоря, Ом.
Из этого же опыта, проведенного при номинальном напряжении, определяют насыщенные значения для данной нагрузки и коэффициенте мощности.
(Измененная редакция, Изм. N 4).
19. ОПРЕДЕЛЕНИЕ ПЕРЕХОДНОГО ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ
19.1. Переходное индуктивное сопротивление по продольной оси ( ) следует определять из опытов внезапного трехфазного короткого замыкания. Допускается определение
из опыта восстановления напряжения и расчетным путем по известным
,
и
.
19.1.1. Переходное индуктивное сопротивление по продольной оси из опыта внезапного короткого замыкания (п.17) определяют как отношение напряжения холостого хода, измеренного непосредственно перед коротким замыканием (0), к начальному значению периодической составляющей тока короткого замыкания за вычетом сверхпереходной составляющей (черт.4).
![]() ;
; ![]() .
.
19.1.2. Определение переходного индуктивного сопротивления методом восстановления напряжения следует производить по осциллограмме восстановления напряжения якоря после отключения симметричного короткого замыкания на выводах машины. При этом получаются ненасыщенные значения индуктивного сопротивления.
Метод восстановления напряжения состоит в том, что испытуемая машина должна вращаться с номинальной частотой при замкнутой накоротко обмотке якоря. Ток возбуждения необходимо устанавливать соответствующим линейной части характеристики холостого хода. Требования к системе возбуждения должны быть аналогичны указанным в п.17.
Отключение установившегося трехфазного короткого замыкания следует производить практически одновременно во всех трех фазах с расхождением по углу в момент гашения дуги в пределах 180 электрических градусов. Во время опыта необходимо производить осциллографирование линейных напряжений и тока якоря во всех фазах (для контроля одновременности отключения). Разность установившегося и восстанавливающегося напряжений ![]() , определяемую по их амплитудам, следует наносить на график в полулогарифмических координатах. Экстраполяция прямолинейной части этого графика на ось ординат дает начальное значение переходной составляющей напряжения
, определяемую по их амплитудам, следует наносить на график в полулогарифмических координатах. Экстраполяция прямолинейной части этого графика на ось ординат дает начальное значение переходной составляющей напряжения (0). Для получения начального значения сверхпереходной составляющей напряжения
(0) на том же графике строят разность между напряжением, определяемым кривой 1 и переходной составляющей напряжения
, экстраполируя ее на момент отключения короткого замыкания (черт.10).
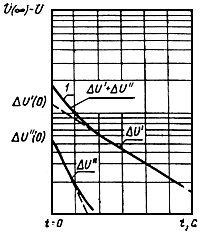
Черт.10
Переходное индуктивное сопротивление по продольной оси определяют как отношение разности между установившимся напряжением и начальным значением переходной составляющей напряжения
(0) к току якоря
, измеренному непосредственно перед отключением короткого замыкания (черт.10).
![]() ;
; ![]() .
.
19.1.3. Переходное индуктивное сопротивление при известных ,
и
следует вычислять по формуле
![]() ,
,
где - переходная постоянная времени по продольной оси при замкнутой накоротко обмотке якоря (п.24.3), с;
- переходная постоянная времени по продольной оси при разомкнутой обмотке якоря (п.24.1), с.
20. ОПРЕДЕЛЕНИЕ СВЕРХПЕРЕХОДНЫХ ИНДУКТИВНЫХ СОПРОТИВЛЕНИЙ
20.1. Сверхпереходное индуктивное сопротивление по продольной оси () следует определять из опыта внезапного короткого замыкания. Допускается определение
из следующих опытов: восстановления напряжения, отключения питания, питания обмотки якоря от внешнего источника при двух положениях ротора и при произвольном положении ротора.
20.1.1. Сверхпереходное индуктивное сопротивление по продольной оси определяют из опыта внезапного короткого замыкания (п.17) как отношение напряжения холостого хода, измеренного непосредственно перед коротким замыканием, к начальному значению периодической составляющей тока короткого замыкания, определенному из анализа осциллограммы (черт.4).
![]() ;
;![]() .
.
20.1.2. Сверхпереходное индуктивное сопротивление по продольной оси из опыта восстановления напряжения (п.19.1.2) определяют как отношение разности между установившимся напряжением и суммой начальных значений переходной
(0) и сверхпереходной
(0) составляющих напряжения к току якоря, измеренному непосредственно перед отключением короткого замыкания (
) (черт.10).
![]() ;
;![]() .
.
20.1.3. Определение сверхпереходных индуктивных сопротивлений методом отключения питания производят следующим образом:
машину с замкнутой накоротко обмоткой возбуждения приводят во вращение со скольжением меньше 1%.
Обмотку якоря присоединяют к симметричному трехфазному источнику номинальной частоты с напряжением 5-10% . Отключение производят при продольном или поперечном положении ротора, которое определяется путем измерения угла между векторами напряжения на выводах и э.д.с. машины.
Во время опыта необходимо регистрировать линейные напряжения, токи якоря и положение ротора.
Для определения сверхпереходного индуктивного сопротивления по продольной оси отключение следует производить при продольном положении ротора.
Сверхпереходное индуктивное сопротивление по продольной оси вычисляют по формуле
![]() ;
; ![]() ,
,
где (0) - ток якоря в момент, предшествующий отключению машины, А;
- мгновенное уменьшение напряжения якоря в момент отключения машины (черт.11), В.
Черт.11
20.1.4. Определение сверхпереходных индуктивных сопротивлений методом питания обмотки якоря от внешнего источника при двух положениях неподвижного ротора производят при подключении к двум любым линейным выводам обмотки якоря источника переменного тока пониженного напряжения номинальной частоты. Обмотка возбуждения должна быть замкнута накоротко.
Опыт дает значение параметров, соответствующих скольжению, равному единице.
Длительность приложения напряжения следует ограничить во избежание перегрева частей ротора.
Медленно поворачивая ротор, следует найти его положения, в которых ток в обмотке возбуждения имеет максимальное и практически нулевое значение. Первое положение соответствует продольной оси, второе - поперечной.
В этих положениях необходимо измерить приложенное напряжение (), ток в обмотке якоря (
) и потребляемую мощность (
).
Если опыт не может быть выполнен при номинальном токе или номинальном напряжении, то для определения параметров, соответствующих пусковым условиям или ненасыщенному состоянию машины, следует проводить несколько опытов при различных значениях приложенного напряжения. По полученным данным строят зависимость определяемого параметра от приложенного напряжения или тока в обмотке якоря.
Для машин с закрытыми и полузакрытыми пазами обмотки якоря или закрытыми пазами успокоительной обмотки приложенное напряжение должно быть не ниже 0,2 номинального.
Сверхпереходное индуктивное сопротивление по продольной оси определяют по формуле
![]() ;
; 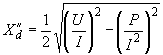 ,
,
где
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() .
.
Значения напряжения, тока и мощности должны быть измерены при максимальном токе в обмотке возбуждения. Мощность рекомендуется измерять с помощью низкосинусных ваттметров.
(Измененная редакция, Изм. N 1).
20.1.5. Определение сверхпереходных индуктивных сопротивлений методом питания обмотки якоря от внешнего источника при произвольном положении неподвижного ротора производят при поочередном подключении каждых двух линейных выводов обмотки якоря испытуемой машины к источнику переменного тока пониженного напряжения. Обмотка возбуждения должна быть замкнута накоротко.
Определение следует производить при неизменном положении ротора для всех трех измерений. При необходимости ротор машины должен быть заторможен.
Значение напряжения и длительность его приложения - по п.20.1.4.
При подключении каждой пары выводов измеряют приложенное напряжение (), ток (
) и мощность (
) цепи якоря и ток в обмотке возбуждения.
По данным испытаний следует вычислять индуктивные сопротивления между каждой парой линейных выводов обмотки якоря (,
,
) по формулам, приведенным в п.20.1.4.
Сверхпереходное индуктивное сопротивление по продольной оси подсчитывают по формуле в физических (или относительных) единицах
![]() ,
,
где
![]() ;
;
Определение знака перед производят следующим образом: плюс - если наибольшему из трех измеренных индуктивных сопротивлений якоря соответствует максимальное из трех значений тока в цепи возбуждения;
минус - если наибольшему из трех измеренных индуктивных сопротивлений якоря соответствует минимальное из трех значений тока в цепи возбуждения.
(Измененная редакция, Изм. N 2).
20.2. Сверхпереходное индуктивное сопротивление по поперечной оси () следует определять из следующих опытов: отключения питания, питания обмотки якоря от внешнего источника при двух положениях ротора или при произвольном положении ротора.
20.2.1. Определение сверхпереходного индуктивного сопротивления по поперечной оси методом отключения питания обмотки якоря от источника пониженного напряжения производят в соответствии с п.20.1.3. Отключение осуществляют при поперечном положении ротора. Сверхпереходное индуктивное сопротивление по поперечной оси вычисляют по формуле
![]() ;
; ![]() .
.
20.2.2. Сверхпереходное индуктивное сопротивление по поперечной оси из опыта питания обмотки якоря от внешнего источника при двух положениях неподвижного ротора следует определять по п.20.1.4 по тем же формулам, в которых индекс необходимо заменить индексом
.
Напряжение, ток и мощность должны измеряться при практически нулевом значении тока в обмотке возбуждения.
20.2.3. Сверхпереходное индуктивное сопротивление по поперечной оси из опыта питания обмотки якоря от внешнего источника при произвольном неизменном положении ротора определяют по п. 20.1.5.
Определение знака перед производят следующим образом: плюс - если наибольшему из трех измеренных индуктивных сопротивлений якоря соответствует минимальное из трех значений тока в цепи возбуждения;
минус - если наибольшему из трех измеренных индуктивных сопротивлений якоря соответствует максимальное из трех значений тока в цепи возбуждения.
21. ОПРЕДЕЛЕНИЕ ИНДУКТИВНОГО И АКТИВНОГО СОПРОТИВЛЕНИЙ ОБРАТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ
21.1. Индуктивное () и активное (
) сопротивления обратной последовательности следует определять из опыта установившегося двухфазного короткого замыкания или из опыта обратного чередования фаз. Допускается определение
расчетом по известным значениям
и
.
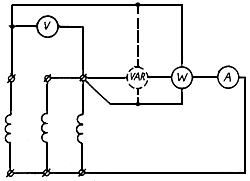
21.1.1. Определение индуктивного и активного сопротивлений обратной последовательности методом установившегося двухфазного короткого замыкания производят при замыкании двух фаз между собой и вращении машины с возбуждением и номинальной частотой с помощью первичного двигателя (черт.12).
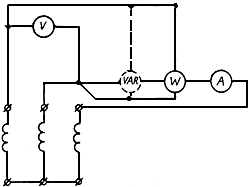
Черт.12
При проведении опыта измеряют ток короткого замыкания (), ток возбуждения, напряжение между линейными выводами разомкнутой и одной из замкнутых фаз (
) и мощность (
).
Измерения производят при нескольких значениях тока короткого замыкания.
Во избежание чрезмерного перегрева частей ротора длительность опыта установившегося двухфазного короткого замыкания при токах выше 0,1 ограничивают временем, необходимым для отсчетов по приборам.
Для явнополюсных машин ток может быть доведен до номинального значения, если при этом вибрация машины не превышает допустимого значения. У неявнополюсных машин ток якоря, как правило, должен быть ограничен 0,5 .
Индуктивное и активное
сопротивления обратной последовательности вычисляют по формулам
![]() ;
; ![]() ;
;
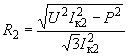 ;
;  .
.
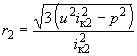
Во избежание искажений результатов измерений при наличии высших гармонических в процессе испытаний следует определять форму кривой напряжения и тока и в случае отклонения их от практически синусоидальных в расчет необходимо принимать значения, соответствующие основным гармоникам. Допускается использовать измеренное значение реактивной мощности (). В этом случае определение
и
можно производить в физических (или относительных) единицах по формулам
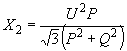 ;
; .
.
По полученным из опытов значениям и
, рассчитанным для каждого измеренного
, строят их зависимости от тока. Ненасыщенные значения
и
определяют экстраполяцией полученных зависимостей на ток короткого замыкания, равный
номинального.
21.1.2. Определение индуктивного и активного сопротивлений обратной последовательности методом обратного чередования фаз производят при питании машины, вращающейся с номинальной частотой от постороннего источника пониженного симметричного напряжения, равного (0,02-0,2) с обратным чередованием фаз, т.е. в режиме электромагнитного тормоза со скольжением, равным 2.
Обмотка возбуждения должна быть замкнута накоротко.
Если остаточное напряжение испытуемой машины превышает 0,3 напряжения источника, то ротор машины перед испытанием следует размагнитить.
При испытаниях измеряют напряжение и ток во всех трех фазах и подведенную мощность.
Индуктивное и активное сопротивления обратной последовательности следует определять по формулам
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;![]() ;
; ![]() ,
,
где - мощность, подведенная к обмотке якоря, В·А;
- средний измеренный ток, А;
- среднее приложенное напряжение, В.
Индуктивное и активное сопротивления определяют для каждого значения приложенного напряжения. На основании результатов опытов строят их зависимости от тока.
21.1.3. Индуктивное сопротивление обратной последовательности по известным из опыта значениям и
подсчитывают по формуле
![]() .
.
22. ОПРЕДЕЛЕНИЕ ИНДУКТИВНОГО И АКТИВНОГО СОПРОТИВЛЕНИЙ
НУЛЕВОЙ ПОСЛЕДОВАТЕЛЬНОСТИ
22.1. Индуктивное () и активное (
) сопротивления нулевой последовательности следует определять из опыта однофазного питания трех фаз испытуемой машины. Допускается определение
и
из опыта установившегося короткого замыкания двух фаз на нейтраль.
22.1.1. Определение индуктивного и активного сопротивлений нулевой последовательности методом однофазного питания трех фаз следует производить на машине, вращающейся с номинальной частотой (или близкой к номинальной), при замкнутой накоротко обмотке возбуждения. При этом все три фазы обмотки якоря соединяют последовательно в разомкнутый треугольник. При проведении опыта должны измеряться напряжение (), ток (
) и мощность (
) при нескольких значениях приложенного напряжения.
Напряжение следует выбирать так, чтобы ток в обмотке якоря не превышал номинального значения. Допускается производить определение индуктивного и активного сопротивлений нулевой последовательности при параллельном соединении фаз обмотки.
Индуктивное и активное сопротивления нулевой последовательности вычисляют по формулам
![]() ;
; ![]() .
.
При последовательном соединении фаз обмотки:
![]() ;
; ![]() ;
;![]() ;
; ![]() .
.
При параллельном соединении фаз обмотки:
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
и
следует определять для каждого значения приложенного напряжения и строить их зависимости от тока.
22.1.2. Определение индуктивного и активного сопротивлений нулевой последовательности методом установившегося короткого замыкания двух фаз на нейтраль производят на машине, вращающейся с номинальной частотой. Обмотка якоря должна быть соединена в звезду, а две фазы замкнуты на нейтраль (черт.13).
Черт.13
При проведении опыта машину следует возбудить и измерить напряжение между выводом разомкнутой фазы и нейтралью (), ток, протекающий в перемычке от замкнутых накоротко выводов к нейтрали (
), и фиктивную мощность (
).
Измерения следует производить при нескольких значениях тока в нейтрали. Значение тока и длительность проведения опыта должны быть ограничены из условий нагревания ротора или возникновения вибрации.
Индуктивное и активное сопротивления нулевой последовательности рассчитывают по формулам
 ;
;  ;
;
![]() ;
; ![]() .
.
При наличии высших гармонических (п.21.1.1) в расчет необходимо принимать значения, соответствующие основным гармоникам.
При использовании приборов для измерения реактивной мощности () индуктивное и активное сопротивления нулевой последовательности могут быть рассчитаны по формулам
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
По полученным из опытов значениям и
, рассчитанным для каждого измеренного
, строят их зависимости от тока. Ненасыщенное значение
и
следует определять экстраполяцией полученных зависимостей на ток в нейтрали, равный трехкратному номинальному току.
23. ОПРЕДЕЛЕНИЕ ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ РАССЕЯНИЯ ЯКОРЯ
И РАСЧЕТНОГО ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ
23.1. Индуктивное сопротивление рассеяния цепи якоря при вынутом роторе следует определять при питании трех фаз обмотки якоря от постороннего источника напряжения номинальной частоты. По приборам определяют приложенное линейное напряжение (
), линейный ток (
) и подводимую мощность (
). По результатам измерения вычисляют индуктивное сопротивление фазы якоря
по формуле
![]() ;
; ![]() ;
;![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
Напряжение источника подбирают так, чтобы ток был не более номинального.
Индуктивное сопротивление рассеяния вычисляют по формуле
![]() ,
,
где - индуктивное сопротивление, обусловленное потоком на активной поверхности якоря, создаваемым обмоткой якоря в том пространстве, которое нормально занимает ротор.
Для определения индуктивного сопротивления на активной поверхности статора следует помещать контрольную катушку, длина которой устанавливается равной полной длине сердечника статора, а ширина - полюсному делению. Активные стороны этой катушки укрепляют над клиньями пазов, а лобовые - оттягивают растяжками по радиусам к оси машины в плоскостях, ограничивающих пакет сердечника статора для предохранения их от влияния потоков рассеяния вокруг лобовых частей обмотки. К контрольной катушке присоединяют вольтметр с возможно большим внутренним сопротивлением.
Индуктивное сопротивление , обусловленное потоком на активной поверхности якоря, вычисляют по формуле
![]() ,
,
где - напряжение, измеренное на контрольной катушке, В;
- линейный ток, А;
- число последовательно соединенных витков одной фазы обмотки якоря;
- обмоточный коэффициент обмотки якоря;
- число витков контрольной катушки.
Если якорь имеет дробное число пазов на полюс и фазу, то ширина контрольной катушки должна быть равна наибольшему целому числу пазов, заключающемуся в полюсном делении, а вычисляют по формуле
 ,
,
где - наибольшее целое число пазов, заключенных в полюсном делении;
- дробное число пазов на полюс и фазу;
=3,14.
23.2. Определение расчетного индуктивного сопротивления следует производить графическим построением. Допускается определение
из опыта питания обмотки якоря при вынутом роторе.
23.2.1. Расчетное индуктивное сопротивление определяют графическим построением по характеристикам холостого хода, установившегося трехфазного короткого замыкания и по точке нагрузочной характеристики, соответствующей номинальным значениям напряжения и тока якоря в режиме перевозбуждения с коэффициентом мощности, близким к нулю.
На график (черт.14) следует нанести характеристики холостого хода и установившегося трехфазного короткого замыкания и точку А, ординатой которой является номинальное напряжение, а абсциссой - ток возбуждения, измеренный при номинальном токе якоря и ![]() в режиме перевозбуждения.
в режиме перевозбуждения.
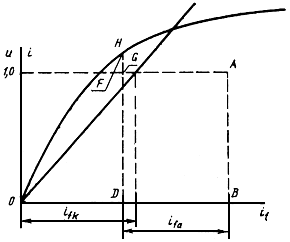
Черт.14
Влево от точки А параллельно оси абсцисс откладывают отрезок AF, равный току возбуждения при номинальном токе якоря по характеристике установившегося трехфазного короткого замыкания. Из точки F проводят линию, параллельно начальной части характеристики холостого хода, до пересечения с последней в точке Н. Перпендикуляр из точки Н на линию AF представляет падение напряжения на индуктивном сопротивлении
при номинальном токе якоря
.
Расчетное индуктивное сопротивление вычисляют по формуле
![]() ;
; ![]() ,
,
где - падение напряжения на расчетном индуктивном сопротивлении при номинальном токе якоря.
23.2.2. Приближенное значение расчетного индуктивного сопротивления для машин с номинальной частотой до 100 Гц может быть получено из опыта определения индуктивного сопротивления цепи якоря при вынутом роторе. В этом случае
![]()
где - индуктивное сопротивление якоря, измеренное при вынутом роторе (п.23.1);
- коэффициент, принимаемый равным 1 для машин с явновыраженными полюсами на роторе и 0,6
0,65 для машин с неявновыраженными полюсами. Значения коэффициентов могут быть уточнены по данным опытов на машинах с аналогичной конструкцией.
24. ОПРЕДЕЛЕНИЕ ПОСТОЯННЫХ ВРЕМЕНИ
24.1. Переходную постоянную времени по продольной оси при разомкнутой обмотке якоря () следует определять по данным опыта гашения поля при разомкнутой обмотке якоря. Допускается определение
из опытов: ударного возбуждения, восстановления напряжения, отключения питания, а также расчетом по известным
,
и
.
24.1.1. Определение переходных постоянных времени по продольной оси по методу гашения поля производят на машине, приводимой во вращение с номинальной частотой путем внезапного замыкания накоротко обмотки возбуждения. В тех случаях, когда это необходимо, источник питания обмотки возбуждения должен быть отключен за время не более 0,02 с после замыкания обмотки возбуждения. Для ограничения тока короткого замыкания источника питания обмотки возбуждения рекомендуется последовательно с ним вводить добавочное сопротивление. Опыт может быть проведен как при разомкнутой, так и при замкнутой накоротко обмотке якоря.
Для определения переходной постоянной времени по продольной оси при разомкнутой обмотке якоря гашение поля должно производиться при номинальном напряжении на выводах машины. Во время опыта осциллографируют напряжение якоря и ток в обмотке возбуждения или напряжение на кольцах. Последние служат для четкого определения момента начала гашения поля. Напряжение якоря, соответствующее этому моменту, принимают за исходное.
Разность напряжения якоря, полученного из осциллограммы и остаточного напряжения машины для различных моментов времени, строят на графике в полулогарифмических координатах.
Время, в течение которого вышеуказанная разность напряжений уменьшится до 0,368 своего первоначального значения, соответствует .
24.1.2. Определение переходных постоянных времени по продольной оси из опыта ударного возбуждения производят на вращающейся с номинальной частотой машине, обмотку возбуждения которой внезапно подключают к цепи якоря, предварительно возбужденного возбудителя или другого источника, обеспечивающих стабильное напряжение на зажимах обмотки возбуждения. Напряжение источника выбирают так, чтобы установившийся ток возбуждения соответствовал прямолинейной части характеристики холостого хода. Опыт может быть проведен как при разомкнутой, так и при замкнутой накоротко обмотке якоря.
Для определения переходной постоянной времени по продольной оси при разомкнутой обмотке якоря необходимо осциллографировать ток и напряжение возбуждения и напряжение якоря. Определенную по осциллограмме разность между установившимся и текущими значениями напряжения якоря вычерчивают в зависимости от времени и полулогарифмических координат. Прямолинейную часть полученной кривой экстраполируют на ось ординат и определяют начальное значение переходной составляющей.
Время, в течение которого переходная составляющая уменьшится до 0,368 своего первоначального значения, соответствует .
Допускается также определение по изменению тока возбуждения. Для этого по характеристике холостого хода следует определить ток возбуждения, соответствующий установившемуся значению напряжения якоря, и отложить в полулогарифмических координатах разность между этим током и текущими значениями тока возбуждения в функции времени.
24.1.3. Определение переходной постоянной времени по продольной оси при разомкнутой обмотке якоря по методу восстановления напряжения производят из опыта по п.19.1.2.
Время, в течение которого переходная составляющая напряжения (черт.10) уменьшается до 0,368 своего первоначального значения, соответствует
.
24.1.4. Определение переходной постоянной времени по продольной оси при разомкнутой обмотке якоря по методу отключения питания производят из опыта в соответствии с п.20.1.3 при продольном положении ротора.
Определенное по осциллограмме напряжение якоря за вычетом остаточного напряжения вычерчивают в зависимости от времени в полулогарифмических координатах (черт.15).
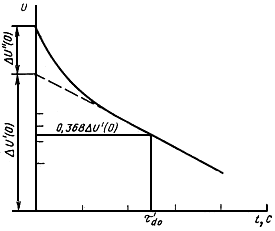
Черт.15
Прямолинейную часть полученной кривой экстраполируют на ось ординат и определяют начальное значение переходной составляющей.
Время, в течение которого переходная составляющая уменьшается до 0,368 своего первоначального значения, представляет переходную постоянную по продольной оси ().
24.1.5. Переходную постоянную времени по продольной оси при разомкнутой обмотке якоря при известных ,
и
вычисляют по формуле
![]() ,
,
где - переходная постоянная времени по продольной оси при замкнутой накоротко обмотке якоря (п.24.3).
24.2. Определение переходной постоянной времени по поперечной оси при разомкнутой обмотке якоря следует производить по данным опыта отключения питания по п.20.1.3 при поперечном положении ротора. Подсчет постоянной времени производят по п.24.1.4.
Если остаточное напряжение больше 0,2 приложенного, то ротор необходимо размагнитить.
24.3. Переходную постоянную времени по продольной оси при замкнутой накоротко обмотке якоря следует определять по данным опытов внезапного трехфазного короткого замыкания и гашения поля при замкнутой накоротко обмотке якоря. Допускается определение
из опыта ударного возбуждения и расчетом по известным
,
, и
.
24.3.1. Определение переходной постоянной времени по продольной оси при замкнутой накоротко обмотке якоря по методу внезапного короткого замыкания производят из опыта по п.17.1.3.
Время, в течение которого переходная составляющая тока якоря уменьшается до 0,368 своего первоначального значения, соответствует
.
24.3.2. Определение переходной постоянной времени по продольной оси при замкнутой накоротко обмотке якоря производят из опыта гашения поля по п.24.1.1 при номинальном токе якоря.
При проведении опыта осциллографируют ток в одной из фаз обмотки якоря и ток в цепи возбуждения.
Разность переходного тока якоря, полученного из осциллограммы, и тока, обусловленного остаточным напряжением машины для различных моментов времени, строят на графике в полулогарифмических координатах.
Время, в течение которого указанная разность токов уменьшится до величины, равной 0,368 своего первоначального значения, соответствует .
24.3.3. Определение переходной постоянной времени по продольной оси при замкнутой накоротко обмотке якоря производят из опыта ударного возбуждения по п.24.1.2.
Во время опыта осциллографируют ток возбуждения и ток короткого замыкания.
Переходную постоянную времени по продольной оси при замкнутой накоротко обмотке якоря определяют по разности между установившимся и переменными значениями тока якоря по п.24.1.2. Допускается определение по разности между установившимся и переменными значениями тока возбуждения.
24.3.4. Переходную постоянную времени по продольной оси при замкнутой накоротко обмотке якоря при известных ,
и
вычисляют по формуле
![]() .
.
24.4. Сверхпереходную постоянную времени по продольной оси при разомкнутой обмотке якоря () следует определять из опыта восстановления напряжения. Допускается определение
расчетом по известным
,
и
.
24.4.1. Определение сверхпереходной постоянной времени по продольной оси при разомкнутой обмотке якоря методом восстановления напряжения производят по п.19.1.2. Время, в течение которого сверхпереходная составляющая напряжения (черт.10) уменьшится до 0,368 своего первоначального значения, соответствует
.
24.4.2. Сверхпереходную постоянную времени по продольной оси при разомкнутой обмотке якоря при известных ,
и
определяют по формуле
![]() ,
,
где - сверхпереходная постоянная времени по продольной оси при замкнутой накоротко обмотке якоря (п.24.5).
24.5. Сверхпереходную постоянную времени по продольной оси при замкнутой накоротко обмотке якоря () следует определять из опыта внезапного трехфазного короткого замыкания на выводах машины. Допускается определять
расчетным путем по известным
,
и
.
24.5.1. Определение сверхпереходной постоянной времени по продольной оси при замкнутой накоротко обмотке якоря методом трехфазного короткого замыкания производят по п.17.1.3. Время, в течение которого сверхпереходная составляющая тока якоря уменьшится до 0,368 своего первоначального значения, соответствует .
24.5.2. Сверхпереходную постоянную времени по продольной оси при замкнутой накоротко обмотке якоря при известных ,
и
вычисляют по формуле
![]() .
.
24.6. Постоянную времени апериодической составляющей тока якоря следует определять из опыта внезапного трехфазного короткого замыкания по затуханию периодической составляющей тока в цепи возбуждения п.17.1.5.
Время, в течение которого периодическая составляющая тока в цепи возбуждения уменьшится до 0,368 своего первоначального значения, соответствует .
24.7. Для определения постоянных времени контура возбуждения и успокоительного контура по продольной оси расчетно-экспериментальным методом следует производить следующих четыре опыта гашения поля:
при холостом ходе с напряжением, соответствующим линейной части характеристики холостого хода и внезапном коротком замыкании обмотки возбуждения;
при холостом ходе с напряжением, соответствующим линейной части характеристики холостого хода, и внезапном замыкании обмотки возбуждения на добавочное сопротивление;
при коротком замыкании с номинальным током и внезапным коротком замыкании обмотки возбуждения;
при коротком замыкании с номинальным током и внезапном замыкании обмотки возбуждения на добавочное сопротивление.
В первых двух опытах осциллографируют затухание напряжения якоря и определяют переходные постоянные времени по продольной оси при разомкнутой обмотке якоря без добавочного сопротивления в цепи возбуждения и с добавочным сопротивлением
по п.24.1.1.
В третьем и четвертом опытах осциллографируют затухание тока якоря и определяют постоянные времени по продольной оси при замкнутой накоротко обмотке якоря без добавочного сопротивления в цепи возбуждения и с добавочным сопротивлением
по п.24.3.2.
Кроме того, во всех четырех опытах осциллографируют затухание тока в обмотке возбуждения для определения сверхпереходных постоянных времени.
Затухание тока в обмотке возбуждения для каждого опыта строят в полулогарифмических координатах, выделяют сверхпереходную составляющую по п.17.1.3. Сверхпереходную постоянную времени по продольной оси следует определять как время, в течение которого сверхпереходная составляющая тока в обмотке возбуждения уменьшается до 0,368 своего первоначального значения.
По осциллограммам затухания тока в обмотке возбуждения определяют
- из опыта гашения поля при разомкнутой обмотке якоря и замыкании обмотки возбуждения накоротко;
- из опыта гашения поля при разомкнутой обмотке якоря и замыкании обмотки возбуждения на добавочное сопротивление;
- из опыта гашения поля при замкнутой накоротко обмотке якоря и замыкании обмотки возбуждения накоротко;
- из опыта гашения поля при замкнутой накоротко обмотке якоря и замыкании обмотки возбуждения на добавочное сопротивление.
Имея опытные переходные и сверхпереходные постоянные времени по продольной оси при замыкании обмотки возбуждения накоротко и
и на добавочное сопротивление
и
вычисляют постоянные времени контура возбуждения
и успокоительного контура
по продольной оси при замкнутой накоротко обмотке якоря по формулам:
![]() ;
;![]() ,
,
где - кратность добавочного сопротивления, вычисленная по формуле
![]() ;
;
- сопротивление обмотки возбуждения, Ом;
- добавочное сопротивление, Ом.
По аналогичным формулам вычисляют постоянные времени контура возбуждения и успокоительного контура
при разомкнутой обмотке якоря, подстановкой в них соответствующих переходных и сверхпереходных постоянных времени.
При наличии автомата гашения поля с дугогасительной решеткой, обеспечивающего быстрое снижение тока возбуждения до нуля и последующий разрыв цепи обмотки возбуждения, постоянные времени успокоительного контура и
допускается определять непосредственно из опытов гашения поля машины при холостом ходе с номинальным напряжением и коротком замыкании с номинальным током соответственно (по осциллограммам затухания напряжения и тока якоря - с момента разрыва цепи обмотки возбуждения).
Постоянные времени контура возбуждения
при этом следует вычислять по формулам
![]() ;
; ![]() .
.
25. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
С УЧЕТОМ МНОГОКОНТУРНОСТИ РОТОРА
25.1. Параметры машины по продольной оси с учетом многоконтурности ротора следует определять по переходной функции, представляющей изменение огибающей периодической составляющей тока якоря от времени из опыта внезапного трехфазного короткого замыкания. Допускается определять параметры по продольной оси по переходным функциям, представляющим:
изменение огибающей напряжения якоря от времени из опыта восстановления напряжения после отключения машины из режима установившегося трехфазного короткого замыкания;
изменение огибающей напряжения якоря от времени из опыта отключения вращающейся машины с замкнутой накоротко обмоткой возбуждения от источника питания в момент совпадения продольной оси ротора с осью результирующего магнитного потока;
затухание постоянного тока в обмотке якоря при неподвижном роторе и совпадении его продольной оси с осью результирующего магнитного потока.
Каждую переходную функцию необходимо представлять приближенно алгебраической суммой установившегося значения тока или напряжения и нескольких составляющих экспонент.
Число экспонент должно быть не более трех-четырех.
Определение начальных (амплитудных) значений и постоянных времени, составляющих экспонент переходной функции, следует производить численными методами, исходя из условия минимальной погрешности аппроксимации исходной кривой, либо графоаналитическими методами аналогично пп.17.1.3, 24.3.1 и 24.5.
25.1.1. По изменению огибающей периодической составляющей тока якоря от времени из опыта внезапного трехфазного короткого замыкания (п.17), представляющей функцию вида
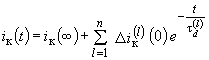 ,
,
следует определять синхронное , переходные
и сверхпереходное
индуктивные сопротивления, а также переходные
и сверхпереходную
постоянные времени при разомкнутой обмотке якоря по продольной оси машины по формулам:
![]() ;
;  ;
;
 ;
;![]() ;
;  ;
;  ,
,
где =1, 2,... j,...
- номера экспонент в порядке уменьшения постоянных времени, начиная с наибольшей;
- установившееся значение тока короткого замыкания, отн. ед.;
![]() - начальные значения составляющих экспонент, отн. ед.;
- начальные значения составляющих экспонент, отн. ед.;
- постоянные времени экспонент при замкнутой накоротко обмотке якоря, с;
- напряжение якоря перед коротким замыканием, отн. ед.
Примечание. При =2,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
25.1.2. По изменению огибающей напряжения якоря от времени из опыта восстановления напряжения после отключения симметричного короткого замыкания (п.19.1.2), представляющей функцию вида
 ,
,
следует определять синхронное, переходные, сверхпереходное индуктивные сопротивления и постоянные времени при замкнутой накоротко обмотке якоря по продольной оси машины по формулам:
![]() ;
;
 ;
; ;
; ;
;
;
 ,
,
где - ток якоря перед отключением короткого замыкания, отн. ед.;
- установившееся значение напряжения якоря после отключения короткого замыкания, отн. ед.;
![]() - начальные значения составляющих экспонент, отн. ед.
- начальные значения составляющих экспонент, отн. ед.
25.1.1, 25.1.2. (Измененная редакция, Изм. N 1).
25.1.3. По изменению огибающей напряжения якоря от времени из опыта отключения вращающейся машины от источника питания в момент совпадения продольной оси ротора с осью результирующего магнитного потока (п.20.1.3), представляющей функцию вида
 ,
,
следует определять синхронное, переходные и сверхпереходное индуктивные сопротивления по формулам:
![]() ;
;  ;
; ;
;
где и
- напряжение и ток якоря перед отключением машины от источника питания, отн. ед.;
![]() - начальные значения составляющих экспонент, отн. ед.;
- начальные значения составляющих экспонент, отн. ед.;
- остаточное напряжение на обмотке якоря, отн. ед.
Определение постоянных времени при замкнутой накоротко обмотке якоря - по п.25.1.2.
25.1.4. Параметры машины по продольной оси методом затухания постоянного тока в обмотке якоря при неподвижном роторе следует определять расчетом по результатам обработки осциллограмм соответствующего опыта.
Опыт затухания постоянного тока необходимо проводить при соединении обмотки якоря в звезду и подключении источника тока к выводам двух любых фаз или выводу одной и объединенным выводам двух других фаз. Ротор должен быть установлен так, чтобы продольная ось полюсов совпала с осью магнитного поля, создаваемого постоянным током в обмотке якоря.
Требуемое положение ротора при выбранной схеме питания следует устанавливать по п.20.1.4.
Для проведения опыта затухания следует собрать схему, приведенную на черт.16, замкнуть накоротко обмотку возбуждения и от источника постоянного тока (например, аккумуляторной батареи) подать в обмотку якоря ток не менее 10 А - для крупных машин, и не менее 0,1 номинального - для остальных.
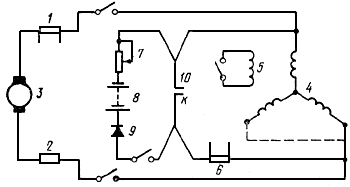
1 - шунт; 2 - балластный резистор; 3 - генератор постоянного тока; 4 - якорь испытуемой машины;
5 - обмотка возбуждения; 6 - безындукционный шунт; 7 - нагрузочный резистор; 8 - батарея аккумуляторов;
9 - диод; 10 - контактор.
Черт.16
После этого включить дополнительный источник постоянного тока той же полярности (электромашинный) и кратковременно подать в обмотку якоря ток намагничивания порядка 10-50 , но не более номинального. Затем ток намагничивания снизить до минимально возможного значения не меняя полярности и отключить. Непосредственно перед опытом измеряют начальный ток в обмотке якоря
, после чего снимают осциллограмму его затухания при включении контактора, шунтирующего обмотку.
Осциллографирование выполняют либо одним осциллографом со ступенчатым повышением чувствительности гальванометра (замыканием накоротко части и всего добавочного сопротивления в его цепи) и уменьшением скорости движения фотобумаги, либо двумя осциллографами, один из которых регистрирует (при большой скорости движения фотобумаги) только начальную часть процесса, а другой со ступенчатым повышением чувствительности гальванометра - весь процесс (при небольшой скорости движения фотобумаги). Допускается проведение опыта путем многократного повторения процесса и осциллографирования его при разной скорости движения фотобумаги, разной чувствительности гальванометров и т.п.
По окончании опыта должны быть измерены сопротивления постоянному току фаз обмотки якоря и внешней цепи контура затухания.
Полученную в результате обработки осциллограмм зависимость изменения во времени тока в обмотке якоря следует представить с учетом п.25.1 переходной функцией вида
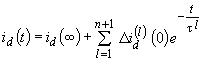 ,
,
где ![]() - начальные значения составляющих экспонент тока якоря, относительные единицы;
- начальные значения составляющих экспонент тока якоря, относительные единицы;
- остаточный ток якоря;
- постоянные времени составляющих экспонент, с.
Постоянные времени  при разомкнутой и
при разомкнутой и ![]() при замкнутой накоротко обмотке якоря следует определять через корни
при замкнутой накоротко обмотке якоря следует определять через корни и
, получаемые при решении уравнений:
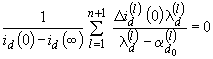 ;
;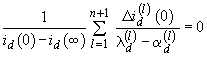 ,
,
где  - декременты затухания составляющих экспонент.
- декременты затухания составляющих экспонент.
Синхронное , сверхпереходное
и переходные
индуктивные сопротивления следует определять по формулам:
 ;
;
 ;
;
 ,
,
где =1,2 . . .
<
;
 ;
;
![]() - сопротивление постоянному току контура затухания, приведенное к одной фазе якоря, относительные единицы;
- сопротивление постоянному току контура затухания, приведенное к одной фазе якоря, относительные единицы;
- сопротивление постоянному току фазы якоря, относительные единицы;
- коэффициент схемы (
![]() при питании двух фаз,
при питании двух фаз, ![]() при питании двух фаз замкнутых накоротко и свободной третьей);
при питании двух фаз замкнутых накоротко и свободной третьей);
- сопротивление постоянному току внешней части контура затухания, относительные единицы;
- знак произведения
.
25.2. Параметры машины по поперечной оси с учетом многоконтурности ротора следует определять по переходным функциям, представляющим изменение огибающей напряжения якоря во времени в опытах отключения вращающейся машины от источника питания (п.20.1.3) или затухания постоянного тока в обмотке якоря при неподвижном роторе и совпадении оси ротора в обоих случаях с перпендикуляром к оси результирующего магнитного потока якоря.
Аппроксимация исходных переходных функций и расчет параметров должны производиться согласно п.25.1 по формулам пп.25.1.3; 25.1.4 соответственно с заменой индекса индексом
.
26. ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
26.1. Частотные характеристики (
),
(
), представляющие собой зависимости комплексного входного сопротивления машины за активным сопротивлением фазы якоря по продольной и поперечной осям от скольжения ротора, а также частотную характеристику
![]() , устанавливающую комплексную зависимость между напряжением на разомкнутых выводах фаз якоря и напряжением на обмотке возбуждения при номинальной частоте вращения ротора от частоты токов в цепи обмотки возбуждения, следует определять из опытов питания обмоток неподвижной машины синусоидальным напряжением разной частоты.
, устанавливающую комплексную зависимость между напряжением на разомкнутых выводах фаз якоря и напряжением на обмотке возбуждения при номинальной частоте вращения ротора от частоты токов в цепи обмотки возбуждения, следует определять из опытов питания обмоток неподвижной машины синусоидальным напряжением разной частоты.
Допускается определять частотные характеристики (
) и
(
), расчетом по параметрам переходных функций, полученных при вращающемся роторе или по параметрам, полученным из опытов затухания постоянного тока в якоре при неподвижном рото
ре.
26.1.1. Для определения частотных характеристик (
) и
(
) опыты питания обмотки якоря неподвижной машины синусоидальным напряжением разных частот от
=0 до
![]() следует проводить по схеме, представленной на черт.17а, либо по схеме, указанной на черт.17б, при положениях ротора по продольной и поперечной осям соответственно. Обмотка возбуждения должна быть замкнута накоротко или разомкнута, если характеристика
следует проводить по схеме, представленной на черт.17а, либо по схеме, указанной на черт.17б, при положениях ротора по продольной и поперечной осям соответственно. Обмотка возбуждения должна быть замкнута накоротко или разомкнута, если характеристика (
) определяется при разомкнутой обмотке возбуждения. Продольную или поперечную оси ротора машины при выбранной схеме питания якоря устанавливают по п.20.1.4.
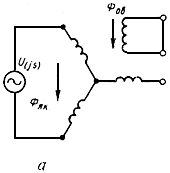
Продольная ось. Питание двух фаз обмотки якоря
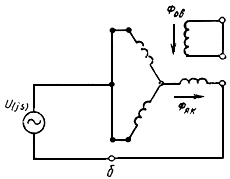
Поперечная ось. Питание трех фаз обмотки якоря. Положение ротора неизменно,
переключением фаз якоря получена поперечная ось
Черт.17
Источник питания переменной частоты должен обеспечивать получение практически синусоидального напряжения и заданного значения тока.
В диапазоне частот от 0 до 10-15 Гц допускается в качестве источника питания использовать машину постоянного тока, возбуждаемую синусоидальным сигналом (черт.18).
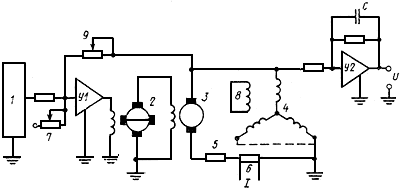
1 - генератор синусоидальных колебаний (ГСК); 2 - электромашинный усилитель (ЭМУ); 3 - генератор
постоянного тока (ГПТ); 4 - якорь испытуемой машины; 5 - балластный резистор 0,1 Ом; 6 - шунт; 7 - вход
усилителя для получения постоянной составляющей и
; 8 - обмотка возбуждения; 9 - резистор
отрицательной обратной связи, обеспечивающей синусоидальность сигнала; У1, У2 - операционные
усилители; С - емкость для подавления помех (0,1 мкФ)
Черт.18
Для уменьшения влияния остаточного намагничивания и гистерезиса магнитной цепи и получения ненасыщенных параметров в обмотку якоря следует подавать переменный ток с амплитудой не менее 0,03 номинального значения тока машины. При меньших значениях тока необходимо применять подмагничивание якоря постоянным током не менее 0,05 номинального тока якоря, на который накладывают переменный ток с меньшей амплитудой.
При проведении опытов должны измеряться ток () и напряжение (
) якоря, фазовый сдвиг между ними (
), а также частота (
). В диапазоне частот от 0 до 20 Гц определение указанных значений следует производить по осциллографическим записям. Помехи коллекторных пульсаций, появляющиеся в измерительной цепи напряжения, следует подавлять фильтром.
На частотах от 20 Гц и более необходимо проводить измерения тока, напряжения, мощности () и частоты приборами класса не ниже 0,5.
Интервалы по частоте в области низких ее значений, где характеристики машины наиболее чувствительны к частоте, должны выбираться достаточно малыми.
Входные сопротивления неподвижной машины ![]() для каждого значения частоты
для каждого значения частоты следует определять по формуле
![]() ,
,
где - коэффициент, учитывающий схему соединения фаз якоря;
![]() (черт.17а) или
(черт.17а) или ![]() (черт.17б);
(черт.17б);
- угол разности фаз напряжения и тока, определяемый по осциллограммам или расчетом по показаниям приборов как arccos
![]() ;
;
=1, 2,...
... N - порядковый номер точек частотной характеристики.
Комплекс сопротивления ![]() вращающейся машины за активным сопротивлением якоря для каждой из осей необходимо определять по выражению
вращающейся машины за активным сопротивлением якоря для каждой из осей необходимо определять по выражению
![]() ,
,
где - сопротивление фазы якоря постоянному току;
- скольжение, определяемое отношением частоты тока опыта
к номинальной
.
Результаты обработки экспериментальных данных следует представлять в графической или табличной форме.
(Измененная редакция. Изм. N 1).
26.1.2. Опыт питания обмотки возбуждения синусоидальным напряжением разных частот от значения близкого к 0 до 5-10 Гц для определения частотной характеристики машины следует проводить при разомкнутой обмотке якоря и неподвижном роторе, установленном по продольной оси относительно двух любых фаз якоря (черт.19). Амплитуду тока, подаваемого в обмотку возбуждения, необходимо поддерживать в пределах 0,05-0,1 номинального тока возбуждения. Требования к источнику питания - по п.26.1.1.
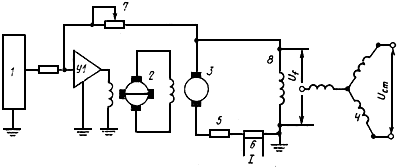
1 - генератор синусоидальных колебаний (ГСК); 2 - электромашинный усилитель (ЭМУ); 3 - генератор
постоянного тока (ГПТ); 4 - якорь испытуемой машины;. 5 - балластный резистор 0,1 Ом; 6 - шунт; 7 - резистор
отрицательной обратной связи, обеспечивающей синусоидальность сигнала; У1 - операционный усилитель;
8 - обмотка возбуждения.
Черт.19
Измерение напряжения на выводах фаз якоря () относительно которых установлена продольная ось ротора, напряжения на обмотке возбуждения (
), фазового сдвига между ними (
) и частоты (
) следует производить по осциллографическим записям.
Точки характеристики вращающейся машины по данным измерений при неподвижном роторе должны определяться по формуле
![]() ,
,
где ![]() - скольжение.
- скольжение.
Результаты обработки экспериментальных данных следует представлять в графической или табличной форме.
Значение ![]() при
при =0 необходимо определять экстраполяцией характеристики и должно соответствовать
![]() ,
,
где ![]() - сопротивление взаимоиндукции;
- сопротивление взаимоиндукции;
- индуктивное сопротивление рассеяния якоря (п.23.1);
- сопротивление постоянному току обмотки возбуждения, приведенное к обмотке якоря.
26.1.3. Определение частотных характеристик ![]() и
и ![]() по параметрам, полученным из переходных функций (пп.25.1.1-25.1.4 и 25.2), следует производить расчетом по формулам
по параметрам, полученным из переходных функций (пп.25.1.1-25.1.4 и 25.2), следует производить расчетом по формулам
 ;
; .
.
27. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ПО ЧАСТОТНЫМ ХАРАКТЕРИСТИКАМ
27.1. Параметры машины по частотным характеристикам ![]() и
и ![]() , полученным из опытов питания обмотки якоря переменным напряжением различной частоты (п.26.1.1) при неподвижном роторе в положениях, соответствующих продольной и поперечной осям, следует определять расчетом численными методами с применением ЭВМ либо графоаналитическим методом.
, полученным из опытов питания обмотки якоря переменным напряжением различной частоты (п.26.1.1) при неподвижном роторе в положениях, соответствующих продольной и поперечной осям, следует определять расчетом численными методами с применением ЭВМ либо графоаналитическим методом.
27.1.1. Параметры по частотным характеристикам для продольной оси численными методами следует определять из системы уравнений
![]() ,
,
где =1, 2... J ... N - порядковый номер точек экспериментальной частотной характеристики;
=1, 2…
...
- порядковый номер отыскиваемых экспонент;
![]() и
и ![]() - начальные значения и декременты затухания составляющих экспонент переходной функции
- начальные значения и декременты затухания составляющих экспонент переходной функции , соответствующей изменению во времени огибающей периодической составляющей тока при внезапном трехфазном коротком замыкании (п.25.1.1);
- синхронное индуктивное сопротивление, определяемое по п.18.2.
Решение уравнений следует выполнять по алгоритмам, исходящим из условия минимума среднеквадратической ошибки, либо итерационным методом по следующей циклической схеме:
 ;
; ;
;  ;
;
…………………………………………………………………………………………………..
 ;
;
 ;
;  ;
;
…………………………………………………………………………………………………….
 ;
;
 ;
;  ,
,
где ,
+1 - индексы предыдущего и последующего циклов итерации.
В первом цикле =0, значения
![]() .
.
Конечным значениям ![]() и
и ![]() соответствуют значения
соответствуют значения (0) и
![]() . Число расчетных комплексов (
. Число расчетных комплексов () должно соответствовать числу предполагаемых контуров на роторе (
). Если их число больше, чем требуется для определения параметров, то наилучшую комбинацию экспонент следует находить путем перебора возможных вариантов решений из комбинаций
![]() . Параметры машины при этом должны определяться по той комбинации экспонент, частотная характеристика которой дает минимальное среднеквадратическое отклонение от точек частотной характеристики
. Параметры машины при этом должны определяться по той комбинации экспонент, частотная характеристика которой дает минимальное среднеквадратическое отклонение от точек частотной характеристики ![]() , полученной экспериментально.
, полученной экспериментально.
По результатам расчетов начальных значений составляющих экспонент (0) и постоянных времени
![]() следует определять переходные
следует определять переходные , сверхпереходное
индуктивные сопротивления и постоянные времени
по формулам п.25.1.1 для
(0)=1.
Определение параметров по частотным характеристикам, полученным для поперечной оси, должно производиться так же, как и для продольной оси, с заменой в расчетных формулах индекса индексом
.
(Измененная редак
ция, Изм. N 1).
27.1.2. Определение параметров по частотным характеристикам для продольной оси машины графоаналитическим методом следует производить путем аппроксимации кривой ![]() , полученной при замкнутой накоротко обмотке возбуждения и затем построенной в логарифмических координатах, ассимптотической ломаной кривой и расчета по приведенным ниже формулам.
, полученной при замкнутой накоротко обмотке возбуждения и затем построенной в логарифмических координатах, ассимптотической ломаной кривой и расчета по приведенным ниже формулам.
Постоянные времени должны определяться по точкам излома ассимптотической ломаной кривой, полученной в результате аппроксимации кривой
20 ![]()
отрезками горизонтальных и с наклоном ±20 дБ на декаду прямых (черт.20). Точкам излома соответствуют скольжения , где
=1, 2, 3... - номер точки излома в порядке возрастания скольжения.
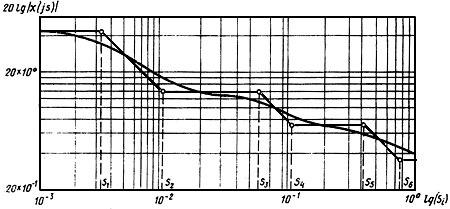
Черт.20
Постоянные времени машины с разомкнутой обмоткой якоря следует определять по скольжениям с нечетными индексами
=2
-1
![]() , c.
, c.
Постоянные времени для замкнутой накоротко обмотки якоря следует определять по скольжениям с четными индексами
=2
![]() , c.
, c.
Синхронное индуктивное сопротивление необходимо определять путем экстраполяции кривой
![]() при разомкнутой обмотке возбуждения к значению
при разомкнутой обмотке возбуждения к значению =0. Если частотная характеристика при разомкнутой обмотке возбуждения не снималась, допускается определять
экстраполяцией характеристики
![]() , полученной для замкнутой накоротко обмотки возбуждения.
, полученной для замкнутой накоротко обмотки возбуждения.
Экстраполяция должна проводиться по 4-5 точкам характеристики, снятых в диапазоне скольжения от 0,01 до 0,2%.
Переходные и сверхпереходное
индуктивные сопротивления следует определять по найденным значениям синхронного индуктивного сопротивления и постоянных времени последовательным расчетом по формуле
 ;
;  ;
;  .
.
По полученным параметрам необходимо записать аналитическое выражение частотной характеристики для продольной оси (п.26.1.3), которое является функцией, аппроксимирующей опытную кривую. Среднеквадратическая погрешность аппроксимации исходной кривой зависит от числа ступенек и изломов ассимптотической ломаной кривой и не должна превышать 5%. При получении большей погрешности следует изменить число ступенек аппроксимирующей кривой.
Для определения параметров машины, представляемой двумя эквивалентными контурами на роторе, кривую 20 ![]() необходимо аппроксимировать ломаной кривой с четырьмя изломами. Тогда
необходимо аппроксимировать ломаной кривой с четырьмя изломами. Тогда
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;![]() ;
; ![]() .
.
Расчет параметров по частотным характеристикам для поперечной оси следует производить также, как и для продольной оси с заменой в формулах индекса индексом
.
28. ИСПЫТАНИЕ СИСТЕМЫ ВОЗБУЖДЕНИЯ*
_________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
28.1. Испытание систем возбуждения - по ГОСТ 21558-76 и по стандартам или техническим условиям на конкретные виды машин или аппаратов.
(Измененная редакция, Изм. N 4).
28.2. Определение номинальной скорости нарастания напряжения возбуждения, предельного напряжения и предельного установившегося напряжения возбуждения, а также времени достижения предельного напряжения возбуждения и запаздывание системы возбуждения следует производить при форсировке возбуждения, условия которой должны соответствовать ГОСТ 21558-76.
Форсировка возбуждения осуществляется путем воздействия на измерительные цепи автоматического регулятора.
Во время опыта необходимо заосциллографировать нарастание напряжения и тока возбудителя.
По данным осциллограммы следует определять номинальную скорость нарастания напряжения возбуждения по ГОСТ 183-74; предельное напряжение возбуждения (как наибольшее, зафиксированное во время опыта), предельное установившееся значение напряжения возбуждения (в момент достижения установленной кратности тока возбуждения), время достижения предельного напряжения возбуждения и запаздывание системы возбуждения по ГОСТ 21558-76.
Для возбудителей, работающих по принципу выпрямления переменного тока и дающих пульсирующее напряжение возбудителя, в расчет необходимо принимать средние значения напряжения.
29. ОПРЕДЕЛЕНИЕ НОМИНАЛЬНОГО ВРЕМЕНИ УСКОРЕНИЯ
И ПОСТОЯННОЙ ЗАПАСЕННОЙ ЭНЕРГИИ*
________________________
* Наименование раздела. Измененная редакция, Изм. N 4.
29.1. Номинальное время ускорения машины или группы машин, объединенных механически, , в течение которого синхронная машина из состояния покоя достигает номинальной частоты вращения под воздействием неизменного ускоряющего момента, равного отношению номинальной активной мощности к номинальной угловой скорости вращения, а также постоянная запасенной энергии
, представляющая собой отношение кинетической энергии, запасенной при номинальной частоте вращения, к номинальной полной мощности машины, могут быть определены следующими методами:
крутильных колебаний;
вспомогательного маятника;
выбега на холостом ходу;
выбега под нагрузкой в режиме двигателя совместно с механизмом;
разбега при сбросе нагрузки в режиме генератора совместно с первичным двигателем.
(Измененная редакция, Изм. N 4)
29.1.1. Определение номинального времени ускорения машины и постоянной запасенной энергии в секундах методами крутильных колебаний и вспомогательного маятника следует производить по формулам
![]() ;
;![]() ,
,
где - момент инерции, определенный из опытов крутильных колебаний или вспомогательного маятника по ГОСТ 27223-87, кг·м
;
![]() - номинальная угловая скорость вращения, рад/с;
- номинальная угловая скорость вращения, рад/с;
- номинальная частота вращения, об/мин;
- номинальная мощность, кВт;
- номинальная полная мощность, Кв·А.
29.1.2. Определение номинального времени ускорения машины и постоянной запасенной энергии по методу выбега на холостом ходу должно производиться при отсутствии на валу испытуемой машины дополнительных тормозных моментов. Возбуждение машины необходимо осуществлять от независимого источника и на время опыта оставлять неизменным.
Частота вращения испытуемой машины устанавливается выше номинальной за счет повышения частоты или с помощью первичного двигателя, снабженного муфтой с расцеплением, после этого источник энергии следует отключить.
Затем определяют время , в течение которого машина изменяет частоту вращения в некотором интервале
, например, 1,1
0,9 или 1,05
0,95 номинальной.
Номинальное время ускорения машины и постоянную запасенной энергии в секундах следует определять по формулам
![]() ;
;![]() ,
,
где - номинальная активная мощность машины, кВт;
- механические потери при номинальной частоте вращения, кВт;
- потери в стали при напряжении опыта и номинальной частоте, кВт;
- номинальная частота вращения, об/мин;
- номинальная полная мощность, Кв·А.
Опыт выбега может быть произведен без возбуждения. При этом момент инерции определяют по ГОСТ 27223-87. Подсчет номинального времени ускорения и постоянной запасенной энергии производят по формулам п.29.1.1.
29.1.3. Определение номинального времени ускорения машины и постоянной запасенной энергии по методу выбега под нагрузкой в режиме двигателя совместно с механизмом следует производить отключением от сети машины, вращающейся с номинальной частотой. Мощность, потребляемая перед отключением, должна быть не менее 0,6 номинальной, коэффициент мощности - близким к единице. Возбуждение машины на время проведения опыта должно оставаться неизменным.
Определяют изменение частоты вращения машины в течение первых нескольких секунд при отключенном источнике питания.
Зависимость частоты вращения от времени выражается графически. К кривой выбега следует провести касательную в точке, соответствующей номинальной частоте вращения машины, и по ней определить отрицательное приращение частоты вращения за интервал времени
.
Номинальное время ускорения и постоянную запасенной энергии машины совместно с механизмом в секундах следует рассчитывать по формулам
![]() ;
;![]() ,
,
где - мощность, потребляемая из сети непосредственно перед отключением, кВт;
![]() - добавочные потери и потери в меди якоря для тока, определенного непосредственно перед отключением, кВт;
- добавочные потери и потери в меди якоря для тока, определенного непосредственно перед отключением, кВт;
- номинальная активная мощность машины, кВт;
- номинальная частота вращения, об/мин;
- номинальная полная мощность, Кв·А.
29.1.4. Определение номинального времени ускорения машины и постоянной запасенной энергии по методу разбега при сбросе нагрузки в режиме генератора совместно с первичным двигателем следует производить путем отключения машины от сети.
Перед опытом нагрузку генератора устанавливают 0,10,2 номинальной (коэффициент мощности устанавливают близким к единице) и выводят из действия автоматический регулятор скорости.
Возбуждение генератора во время проведения опыта должно оставаться неизменным.
При отключении генератора от сети определяют изменение частоты вращения во времени и строят кривую разбега. К кривой разбега проводят касательную в точке, соответствующей номинальной частоте вращения машины.
Номинальное время ускорения агрегата и постоянную запасенной энергии в секундах рассчитывают по формулам
![]() ;
;![]() ,
,
где - мощность, измеренная в цепи якоря непосредственно перед отключением от сети, кВт;
![]() - отношение приращения времени к приращению частоты, определенное по касательной кривой разбега в точке, соответствующей номинальной частоте вращения;
- отношение приращения времени к приращению частоты, определенное по касательной кривой разбега в точке, соответствующей номинальной частоте вращения;
- номинальная активная мощность машины, кВт;
- номинальная частота вращения, об/мин;
- номинальная полная мощность, кВ·А.
29.1.1-29.1.4. (Измененная редакция, Изм. N 4).
30. ОПРЕДЕЛЕНИЕ ПУСКОВЫХ ТОКОВ И ВРАЩАЮЩИХ МОМЕНТОВ СИНХРОННЫХ
ДВИГАТЕЛЕЙ И СИНХРОННЫХ КОМПЕНСАТОРОВ, НЕ ИМЕЮЩИХ ПУСКОВЫХ
ДВИГАТЕЛЕЙ; ОПРЕДЕЛЕНИЕ МАКСИМАЛЬНОГО ВРАЩАЮЩЕГО МОМЕНТА
30.1 Определение пусковых токов и вращающих моментов при асинхронных пусках синхронных двигателей и синхронных компенсаторов, а также максимального вращающего момента явнополюсных и неявнополюсных синхронных машин - по ГОСТ 11828-86 и ГОСТ 7217-87.
(Измененная редакция, Изм. N 4).
30.1.1, 30.1.2, 30.2, 30.3, 30.4. (Исключены, Изм. N 4).
31. ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКОГО НАПРЯЖЕНИЯ МЕЖДУ КОНЦАМИ ВАЛА
31.1. Измерение электрического напряжения между концами вала - по ГОСТ 11828-86.
(Измененная редакция, Изм. N 4).
32. ОПРЕДЕЛЕНИЕ УТЕЧЕК ВОДОРОДА
32.1. Утечку водорода () на работающей машине следует определять при неизменном номинальном давлении в корпусе машины по изменению давления в баллоне, используемом для подпитки. Допускается определение
по изменению номинального давления в корпусе генератора при отсутствии подпитки во время опыта.
(Измененная редакция, Изм. N 2).
32.1.1. Утечку водорода при неизменном давлении в корпусе генератора по изменению давления в баллоне, используемом для подпитки, определяют в режиме холостого хода без возбуждения, или в любом другом режиме при условии, что во время проведения опыта остаются практически неизменными нагрузка, условия охлаждения машины и температуры газа в баллоне.
При испытании должно измеряться давление водорода в баллоне через равные промежутки времени - не реже, чем каждые 30 мин в течение не менее 3 ч.
Зависимость этого давления от времени представляет наклонную прямую с угловым коэффициентом
![]() , Па/ч,
, Па/ч,
где и
- давление в баллоне в начале и в конце опыта, Па;
и
- время начала и конца опыта, ч.
Утечку водорода в м/ч, приведенную к нормальным условиям:
давлению 1,013·10 Па (760 мм рт.ст.) и температуре 0 °С, определяют по формуле
![]() ,
,
где - объем баллона, м
;
- температура газа при испытании, °С.
(Измененная редакция, Изм. N 1).
32.1.2. Утечку водорода по изменению давления в корпусе генератора при отсутствии подпитки во время опыта определяют в режимах, аналогичных п.32.1.1.
Испытание должно производиться не менее 8 ч.
Утечку водорода в м/ч, приведенную к нормальным условиям, в этом случае следует рассчитывать по формуле
 ,
,
где - газовый объем машины в собранном виде, м
;
- продолжительность опыта, ч;
и
- абсолютное давление водорода в начале и в конце опыта на входе в машину, Па;
и
- температура входящего в машину водорода в начале и в конце опыта, °С.
Примечания
:
1. Если при проведении опыта давление измеряют в других единицах, то в предыдущих формулах вместо коэффициента 0,00269 следует подставлять соответствующие множители:
мм вод.ст. | мм рт.ст. | мкгс/см | |||
0,0264 | 0,359 | 264,3 | |||
2. При испытании машин, охлаждаемых водородом, на газоплотность в неподвижном состоянии заполняют корпус машины воздухом давлением, равным рабочему давлению водорода, и определяют утечку воздуха в соответствии с требованием пп.32.1.1 и 32.1.2. Полученное значение умножают на 3,2 - получают приближенную оценку утечки водорода.
(Измененная редакция, Изм. N 2).
33. ИЗМЕРЕНИЕ ВИБРАЦИИ
33.1. Вибрацию синхронных электрических машин с массой от 0,5 до 2000 кг и рабочей частотой вращения от 600 об/мин и выше следует определять по ГОСТ 12379-75, а машин с массой более 2000 кг, частотой вращения до 3000 об/мин и мощностью более 100 кВт (за исключением гидрогенераторов, турбогенераторов и соединенных с ними возбудителей, синхронных компенсаторов, судовых электродвигателей и электромашинных агрегатов) - по ГОСТ 20815-75.
Дополнительные условия измерения вибрации и методы определения вибрации других синхронных машин должны быть указаны в стандартах или технических условиях на конкретные типы машин.
33.2. Вибрации гидрогенераторов следует измерять по ГОСТ 5616-81 на подшипниках, в зоне верхней и нижней крестовин, на спинке сердечника и корпусе статора, на лобовых частях обмотки статора.
Вибрации крестовин машин вертикального исполнения измеряются в радиальном, тангенциальном и вертикальном направлениях на нижней полке лап со стороны встроенного направляющего подшипника при номинальной частоте вращения в режимах холостого хода без возбуждения, холостого хода с возбуждением (при номинальном напряжении), с активной нагрузкой 0,2; 0,5; 0,75; 1,0 номинальной и в режиме синхронного компенсатора (при перевозбуждении), если такой режим предусмотрен техническими условиями на конкретные типы машин.
Вибрации подшипников гидрогенераторов горизонтального исполнения измеряют в тех же режимах в поперечном, осевом и вертикальном направлениях на уровне оси вала.
Измерение вибраций сердечника и корпуса статора гидрогенератора следует проводить при работе генератора при номинальной частоте вращения в режиме холостого хода при изменении тока возбуждения от нуля до значения, соответствующего номинальному напряжению, а также при номинальной нагрузке или при номинальном токе возбуждения в режиме синхронного компенсатора. Вибрации измеряют на спинке сердечника в радиальном направлении в среднем по высоте сечения вблизи стыков сердечника, а на корпусе статора - в радиальном направлении в среднем по высоте сечения между воздухоохладителями.
Вибрацию лобовых частей обмоток статора гидрогенератора следует измерять в режиме установившегося трехфазного короткого замыкания при номинальном токе статора и изменении частоты вращения в пределах от 0,4 до 1,2 номинальной и в режиме максимально возможной (но не выше номинальной) нагрузки. Вибрация измеряется в радиальном и тангенциальном направлениях вблизи головок и мест выхода из паза шести нулевых стержней в верхней и нижней частях гидрогенератора.
(Измененная редакция, Изм. N 2, 3).
33.3 Вибрации подшипников и контактных колец турбогенераторов измеряют при номинальной частоте вращения в режимах холостого хода без возбуждения, холостого хода при номинальном напряжении, номинальной нагрузке (на месте установки).
Вибрации подшипников турбогенераторов и их возбудителей должны определяться по ГОСТ 533-85 и ГОСТ 25364-82.
Вибрации контактных колец турбогенераторов необходимо определять путем измерения вибрации щеток щеточного аппарата в двух взаимно перпендикулярных направлениях - вертикальном и поперечном по отношению к оси вала машины.
Вибрации сердечника и корпуса статора турбогенераторов следует измерять при работе машины на холостом ходу с номинальным напряжением и частотой, а при испытании на месте установки и при номинальном режиме работы. При этом вибрации сердечника статора измеряют в радиальном направлении в сечении, по возможности близком к среднему по длине сердечника, а вибрации корпуса статора - в радиальном направлении в среднем по длине сечения в верхней точке и в точках, близких к опорам статора.
Вибрации лобовых частей обмотки статора турбогенераторов следует измерять при номинальном значении тока статора в режиме установившегося трехфазного короткого замыкания, а при испытании на месте установки - и при номинальной нагрузке. Вибрации лобовых частей обмотки статора измеряют в радиальном и тангенциальном направлениях вблизи головок трех нулевых стержней обмотки статора.
(Измененная редакция, Изм. N 3, 4).
33.4. Вибрация подшипников синхронных компенсаторов по ГОСТ 609-84 должна измеряться на уровне оси вала в поперечном, осевом и вертикальном направлениях при работе на холостом ходу с номинальными напряжениями и частотой и в номинальном режиме.
(Измененная редакция, Изм. N 4).
34. ИЗМЕРЕНИЕ ШУМА
34.1. Измерение шума - по ГОСТ 11929-81 и ГОСТ 12.1.026-80*.
________________
* Отменен. Действует ГОСТ Р 51401-99. - .
(Измененная редакция, Изм. N 3).
34а. ИСПЫТАНИЕ МАСЛО-, ГАЗО- И ВОЗДУХООХЛАДИТЕЛЕЙ
34а.1. Испытание масло-, газо- и воздухоохладителей - по ГОСТ 11828-86.
Раздел 34а. (Введен дополнительно, Изм. N 4).
35. ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
35.1. Требования безопасности синхронных машин и используемого при испытаниях электротехнического оборудования - по ГОСТ 12.2.007.0-75 - 12.2.007.6-75, ГОСТ 12.2.007.7-83 и ГОСТ 12.2.007.11-75 - 12.2.007.13-75, ГОСТ 12.3.019-80.
Металлические нетоковедущие части машины и вспомогательного оборудования, которые могут оказаться под напряжением (при нарушении изоляции режима работы и т.п.), должны быть надежно заземлены.
При испытании электрических машин должны соблюдаться действующие "Правила техники безопасности при эксплуатации электроустановок потребителей", "Правила технической эксплуатации электрических станций и сетей" и "Правила техники безопасности при эксплуатации электроустановок", утвержденные Минэнерго СССР и Президиумом ЦК профсоюза рабочих электростанций и электротехнической промышленности 28 ноября 1979 г.
(Измененная редакция, Изм. N 2).
Текст документа сверен по
М.: Издательство стандартов, 1984
Редакция документа с учетом
изменений и дополнений подготовлена
