ПНСТ 437-2020
(ИСО 21919-1:2019)
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Умное производство
ИНТЕРФЕЙСЫ ДЛЯ УХОДА ЗА АВТОМАТИЗИРОВАННОЙ МАШИНОЙ
Часть 1
Общие положения
Smart manufacturing. Interfaces for automated machine tending. Part 1. Overview and fundamental principles
ОКС 25.040.020
Срок действия с 2021-01-01
до 2024-01-01
Предисловие
1 ПОДГОТОВЛЕН Акционерным обществом "Всероссийский научно-исследовательский институт сертификации" (АО "ВНИИС") и Акционерным обществом "Российская венчурная компания" (АО "РВК") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 194 "Кибер-физические системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 11 августа 2020 г. N 46-пнст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 21919-1:2019* "Системы промышленной автоматизации и интеграция. Интерфейсы для ухода за автоматизированной машиной. Часть 1. Общие положения" (ISO 21919-1:2019, "Automation systems and integration - Interfaces for automated machine tending - Part 1: Overview and fundamental principles", MOD) путем изменения отдельных фраз (слов, значений показателей, ссылок), которые выделены в тексте курсивом**.
Внесение указанных технических отклонений направлено на учет потребностей национальной экономики Российской Федерации.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
Сопоставление структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении ДА
5 Некоторые элементы настоящего стандарта могут быть объектами патентных прав. Международная организация по стандартизации (ИСО) не несет ответственности за установление подлинности каких-либо или всех таких патентных прав
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011** (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 121205 Москва, Инновационный центр Сколково, улица Нобеля, 1, e-mail: [email protected] и/или в Федеральное агентство по техническому регулированию и метрологии: 109074 Москва, Китайгородский проезд, д.7, стр.1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Автоматическое обслуживание машин означает автоматическую загрузку или разгрузку одной или нескольких машин с использованием устройства обслуживания машин.
Примерами машин являются станки, как правило, с числовым программным управлением (ЧПУ), метрологические координатно-измерительные машины (КИМ), 3D-сканер структурированного света и рентгеновские аппараты. Примеры устройств обслуживания машин - роботы, погрузочно-разгрузочные системы, портальное загрузочное устройство, автономные интеллектуальные машины (AIV) и автоматически управляемые тележки (AGV).
Автоматическое обслуживание машин является существенным элементом в высокопроизводительных промышленных условиях и сложной областью деятельности. Устройства автоматического обслуживания представляют собой сложные системы, предоставляемые разными поставщиками и впервые встречаемые на производственной площадке. Для беспроблемной совместной работы всех устройств должны быть определены интерфейсы.
Определение интерфейсов зависит от конкретного проекта, или каждый поставщик внедряет собственные стандарты. При таком подходе возрастает количество сбоев, что влечет за собой существенные временные и трудовые затраты. Время ввода в эксплуатацию часто превышает запланированное, так как каждый интерфейс создается индивидуально, а предварительное тестирование в некоторых случаях не представляется возможным. Такие проблемы являются существенными препятствиями для проектов автоматизации.
Стандартизованные интерфейсы позволяют оптимизировать процессы координации, обеспечивают более высокую надежность планирования, сокращают время ввода в эксплуатацию и уменьшают количество ошибок.
Системы автоматического обслуживания машин могут быть очень сложными системами, и стандарты должны быть достаточно гибкими для более эффективной адаптации к требованиям отдельных проектов.
Приложения автоматического обслуживания машин варьируются от простого снятия деталей до материальных потоков на сложные производственные линии. Машинные технологии обработки не зависят от интерфейса, и большинство машинных технологий могут быть интегрированы с одним и тем же стандартом.
1 Область применения
Интерфейсы являются связующим звеном между устройствами автоматического обслуживания машин и машинами, используемыми для осуществления производственных процессов. Автоматическое обслуживание машины инициируется машиной или системой обслуживания машины.
Настоящий стандарт предоставляет общие сведения и определяет:
- основные принципы создания интерфейсов для автоматического обслуживания машин с использованием устройства обслуживания машины;
- словарь;
- синтаксис структуры сигналов;
- интерфейс безопасности, интерфейс управления и расширения;
- три класса соответствия и параметры соответствия.
Классы и опции состоят из нескольких сигналов:
- для гибкой адаптации интерфейса(ов) к объему функций проекта;
- плотного упаковывания наборов сигналов для снижения затрат по координации между источником снабжения устройства обслуживания машин и машинами.
Настоящий стандарт распространяется на соединения, связанные с управлением и безопасностью, и не распространяется на механические соединения, физические процессы передачи, назначение контактов, аппаратное обеспечение интерфейсов или характеристики канала, например протокол, а также не рассматривает коммуникацию с системой управления производством (MES).
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 элемент (part): Физическая сущность, которая транспортируется в машину и из нее системой обслуживания машины.
Пример - Заготовки, наборы заготовок на держателях заготовок, инструменты, наборы инструментов в держателях инструментов.
2.2 функциональная единица (functional unit): Устройство или система, которые транспортируют, получают или передают элементы.
Пример - Машины и автоматизированные системы обслуживания машин.
2.3 система обслуживания машины (machine tending system): Функциональная единица, транспортирующая элементы без изменения их физических свойств.
Пример - Роботы, конвейеры, порталы, системы подачи прутков, системы обработки.
Примечание - Cм. рисунок А.1 приложения А.
2.4 машина (machine): Функциональная единица, изменяющая физические свойства элементов.
Пример - Станки, измерительные машины, стиральные машины и монтажные системы.
Примечание - См. рисунок А.1 приложения А.
2.5 автоматическое обслуживание машины (automated machine tending): Процесс транспортирования элементов в машину и из нее системой обслуживания машины.
Примечание - См. рисунок А.1 приложения А.
2.6
интерфейс (interface): Совместно используемая граница между двумя функциональными единицами, определяемая различными функциональными характеристиками, параметрами физического соединения, параметрами взаимосвязи при обмене сигналами, а также другими характеристиками в зависимости от задаваемых требований. [ГОСТ 33707, статья 4.447] |
2.7 сигнал (signal): Информация, передаваемая между функциональными единицами через интерфейс.
2.8 область интерференции (interference area): Совместно используемая область между функциональными единицами.
Примечание - См. рисунок А.2 приложения А.
2.9 препозиция области интерференции (interference area preposition): Область интерференции без области передающей станции (устройства).
Примечание - См. рисунок А.2 приложения А.
2.10 когерентная передача (coherent transfer): Передача элементов в тот момент, когда одна функциональная единица удерживает элемент в форме до тех пор, пока другая функциональная единица ее надежно не закрепит.
Примечание - Когерентная и некогерентная передачи определяются для операций погрузки и разгрузки.
Пример - При загрузке элемента в станок робот держит захваты закрытыми до тех пор, пока станок не зажмет деталь. После того как станок зажал деталь, робот открывает захваты.
2.11 функциональный режим (function mode): Статус функциональной единицы, отображающий, являются ли сигналы допустимыми/исполненными.
2.12 класс соответствия (conformance class): Предопределенное подмножество сигналов, выбранное для реализации определенного набора функций, для которых заявлено соответствие.
Примечание - Предопределенными наборами функций являются класс соответствия 1 "Минимальный набор сигналов", класс соответствия 2 "Расширенная область" и класс соответствия 3 "Расширенная область с оптимизацией процесса".
2.13 параметр соответствия (conformance option): Предопределенное подмножество сигналов, которое можно выбрать для добавления набора функций в класс соответствия, для которого заявлено соответствие.
2.14 доступ к загрузке (loading access): Защитный кожух, отделяющий машину от системы обслуживания машины для обмена элементами.
Пример - Загрузочные люки и загрузочные двери.
Примечание - См. рисунки А.3 и А.4 приложения А.
2.15 квитирование (handshake): Взаимодействие между функциональными единицами с запросом как триггером и сигналом подтверждения или состояния как ответом.
2.16 состояние (state): Сигнал, описывающий свойства.
2.17 сопряженная операция; IntdOp (interlinked operation): Функциональный режим, при котором функциональная единица участвует в автоматическом обслуживании машины.
2.18 единичная операция; SOp (single operation): Функциональный режим, при котором функциональная единица работает с элементом, но не участвует в сопряженной операции.
2.19 единичный этап; SSp (single step): Функциональный режим, при котором функциональная единица перемещается последовательными движениями при инициировании каждого движения оператором.
2.20 операция установки, SetOp (setup operation): Функциональный режим, при котором оператор может вручную выполнить любое движение функциональной единицы.
3 Сокращения
В настоящем стандарте применены следующие сокращения:
IntdOp | - сопряженная операция (Interlinked Operation); |
MES | - система управления производством (Manufacturing Execution System); |
SetOp | - операция установки (Setup Operation); |
SOp | - единичная операция (Single Operation); |
SSp | - единичный этап (Single Step); |
PFHD | - вероятность возникновения опасного отказа за час (Probability of a Dangerours Failure per Hour). |
4 Описание интерфейсов
4.1 Общие положения
Интерфейсы автоматического обслуживания машин включают:
- интерфейс безопасности;
- интерфейс управления.
4.2 Структура, диапазон и стандарты интерфейса
4.2.1 Общие положения
Передача сигналов проводится через аппаратный интерфейс (параллельная проводка) или через систему шин.
Должна быть реализована функция эквипотенциального соединения между системой автоматического обслуживания машины и машиной. Такая функция не используется в качестве защитного проводника.
Должно быть определено, будет ли использовано электропитание (например, напряжение 0 и 24 В) системы автоматического обслуживания машины и/или машины в проекте.
Примечание - Если питание используется для обеих функциональных единиц, то устройства безопасности должны быть снабжены электропитанием даже при выключении одной функциональной единицы.
Назначение контактов и формат разъема должны быть согласованы с проектом разработки аппаратных технологий в виде параллельной проводки для одного или обоих интерфейсов.
4.2.2 Характеристики интерфейса
Для гибкой адаптации интерфейса к наборам функций проекта сигналы группируют в классы соответствия и параметры соответствия. Группировка обеспечивает индивидуальную формализацию интерфейса при соответствии требованиям настоящего стандарта.
При использовании настоящего стандарта должны быть выбраны один класс соответствия, параметры соответствия и, при необходимости, расширение, определяемое проектом.
При выборе класса соответствия/параметра соответствия в интерфейсе должны быть доступны сигналы, назначенные определенному классу или параметру соответствия.
4.2.3 Класс соответствия
4.2.3.1 Класс соответствия 1: минимальный набор сигналов
В классе соответствия 1 должны быть реализованы следующие функции:
- безопасность людей;
- простая разгрузка;
- простая загрузка;
- простая комбинированная разгрузка и загрузка.
Слово "простая" означает, что не вводится различие между когерентной и некогерентной передачей и что через интерфейс не обрабатываются функции привязки.
Применение - Класс соответствия 1 не применим к тем машинам, которым требуется когерентная передача.
4.2.3.2 Класс соответствия 2: расширенный набор сигналов
В классе соответствия 2 должны быть реализованы все функции класса соответствия 1, а также следующие функции:
- разгрузка с некогерентной передачей с/без функции привязки;
- разгрузка с когерентной передачей;
- загрузка с некогерентной передачей с/без функции привязки;
- загрузка с когерентной передачей;
- комбинированная разгрузка и загрузка с некогерентной передачей с/без функции привязки;
- комбинированная разгрузка и загрузка с когерентной передачей;
- подготовка элемента;
- освобождение;
- функции охранных дверей;
- дополнительная информация о статусе.
Примечание - Класс соответствия 2 и класс соответствия 3, как правило, реализованы через интерфейс шины ввиду большого объема сигналов.
4.2.3.3 Класс соответствия 3: расширенный набор сигналов с оптимизацией процесса
В классе соответствия 3 должны быть реализованы все функции класса соответствия 2, а также следующие функции:
- оптимизация процесса при комбинированной разгрузке и загрузке с когерентной передачей;
- оптимизация процесса при комбинированной разгрузке и загрузке с некогерентной передачей с/без функции привязки;
- оптимизация процесса при предварительном позиционировании машины;
- оптимизация процесса, если привязка и сброс выполнены более чем за один шаг.
4.2.4 Параметры соответствия
Выбор параметра соответствия позволяет добавить набор функций к классу соответствия. Набор сигналов, определенных для параметра соответствия, предназначен для выполнения конкретной задачи.
Доступны следующие параметры соответствия (может быть выбран любой параметр):
- контроль машиной доступа к загрузке;
- контроль системой автоматического обслуживания машин доступа к загрузке;
- разрешающее устройство;
- мониторинг связи;
- управление ресурсом инструмента;
- центральные функции;
- управляющие сигналы для функций безопасности;
- данные об элементах;
- установочная информация;
- консоль машины;
- регуляция положения элемента.
В таблице 1 указано наличие в параметре соответствия сигналов безопасности и/или управляющих сигналов.
Таблица 1 - Распределение сигналов безопасности и управляющих сигналов для параметров соответствия
Параметр соответствия | Сигнал безопасности | Управляющий сигнал |
Контроль машиной доступа к загрузке | + | + |
Контроль системой автоматического обслуживания машин доступа к загрузке | + | + |
Разрешающее устройство | + | + |
Мониторинг связи | - | + |
Управление ресурсом инструмента | - | + |
Центральные функции | - | + |
Управляющие сигналы для функций безопасности | - | + |
Данные об элементах | - | + |
Установочная информация | - | + |
Консоль машины | - | + |
Регуляция положения элемента | - | + |
4.2.5 Расширение интерфейсов
4.2.5.1 Общие положения
В зависимости от сложности проекта может потребоваться расширение (например, сигналов). Настоящий стандарт допускает расширение, обусловленное системой.
Расширение, обусловленное системой, должно быть задокументировано.
4.2.5.2 Примеры расширений
Расширения, обусловленные системой, проводят в том случае:
- если задача может быть выполнена исключительно с использованием дополнительных сигналов;
- если машина имеет более одной области интерференции.
4.2.5.2.1 Дополнительные сигналы
Для проекта могут быть определены дополнительные сигналы и функции.
4.2.5.2.2 Наличие более одной области интерференции
4.2.5.2.2.1 Отдельные зоны безопасности
Сигналы интерфейса безопасности и интерфейса управления должны быть полностью продублированы.
4.2.5.2.2.2 Одинаковая зона безопасности
Сигналы интерфейса управления должны быть полностью продублированы; есть только один интерфейс безопасности.
На рисунке 1 показана основная структура интерфейсов для автоматического обслуживания машин.
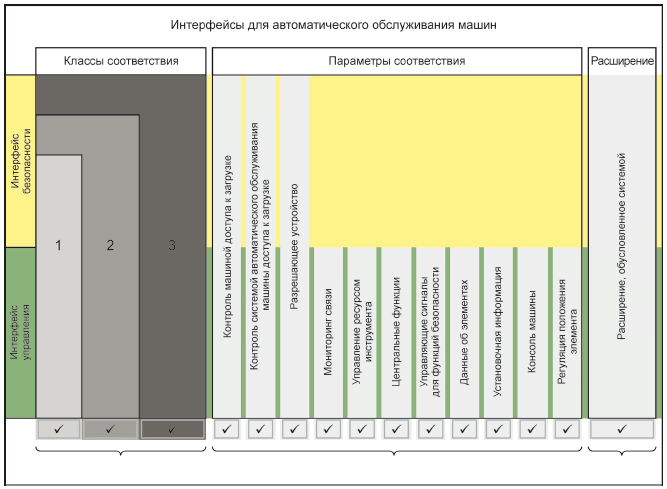 |
Рисунок 1 - Основная структура интерфейсов
4.2.6 Описание структуры сигнала
4.2.6.1 Диапазон
Настоящий пункт определяет синтаксис для определения сигналов. Распределение сигналов по физическим каналам выходит за рамки настоящего стандарта.
4.2.6.2 Атрибуты
4.2.6.2.1 Общие положения
Каждый сигнал интерфейса должен иметь следующие атрибуты:
- символьное имя;
- комментарий;
- формат;
- поведение сигнала;
- режим работы системы автоматического обслуживания машины;
- режим работы машины;
- значение PFHD (только для интерфейса безопасности);
- описание.
На рисунке 2 показан пример сигнала и его атрибутов.
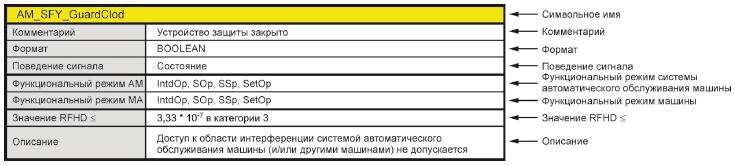 |
Рисунок 2 - Пример сигнала и его атрибутов
Атрибуты сигналов определены в нижеприведенных пунктах.
4.2.6.2.2 Символьное имя
4.2.6.2.2.1 Общие положения
Символьное имя состоит из трех сегментов, которые разделены знаком подчеркивания. Максимальная длина поля 24 символа. Поле определяет сигнал в логическом состоянии "1".
Примеры
1 "MA_STA_LdgDoorOpnd" в логическом состоянии "1": доступ к загрузке открыт.
2 "MA_STA_LdgDoorOpnd" в логическом состоянии "0": доступ к загрузке закрыт.
Форматы трех сегментов символьного имени определены далее.
4.2.6.2.2.2 Первый сегмент
Первый сегмент состоит из двух букв в верхнем регистре и определяет направление сигнала.
"AM" означает сигнал от системы автоматического обслуживания машины к машине. "MA" означает сигнал от машины к системе автоматического обслуживания машины.
4.2.6.2.2.3 Второй сегмент
Второй сегмент состоит из трех букв в верхнем регистре и имеет значение "SFY" для сигналов безопасности или значение типа управляющего сигнала.
Допускаются следующие значения типа управляющего сигнала:
- STA - состояние;
- REQ - запрос;
- ACK - подтверждение;
- MPA - консоль машины;
- ENA - доступно;
- INF - информация;
- DAT - данные.
Более подробная информация приведена в 5.2.8.
4.2.6.2.2.4 Третий сегмент
Третий сегмент состоит из 17 буквенно-цифровых символов и включает одно или несколько сокращенных английских слов или частей слов для объяснения значения сигнала (описательное имя). Слова или части слов начинаются с заглавной буквы.
В конце третьего сегмента может быть добавлен последовательный номер, например: 01, который указывает на существование сигналов с тем же символьным именем, но с другим последовательным номером. Последовательные номера используют, например, в том случае, если машина может обрабатывать несколько частей.
На рисунке 3 показан пример символьного имени сигнала.
Рисунок 3 - Пример символьного имени сигнала
4.2.6.2.3 Комментарий
В поле комментария приведены объяснения сигнала и его функции.
На рисунке 4 показан пример комментария к символьному имени сигнала.
Рисунок 4 - Пример комментария к символьному имени сигнала
4.2.6.2.4 Формат
В поле формата определяется формат сигнала, например:
- Boolean (булево значение);
- UINT16 (целое 16-битное число без знака);
- UINTX (целое X-битное число без знака, где "X" - степень 2).
В проектах могут быть определены другие форматы.
На рисунке 5 показан пример формата сигнала.
Рисунок 5 - Пример формата сигнала
4.2.6.2.5 Поведение сигнала
Допускаются следующие значения поведения сигнала:
- пульс 1 Гц;
- квитирование;
- состояние;
- данные.
На рисунке 6 показан пример поведения сигнала.
Рисунок 6 - Пример поведения сигнала
4.2.6.2.6 Функциональный режим
В полях функционального режима определены функциональный режим системы автоматического обслуживания машины и машины.
Допускаются следующие значения функционального режима:
- IntdOp - сопряженная операция;
- SOp - единичная операция;
- SSp - единичный шаг;
- SetOp - операция установки.
На рисунке 7 показан пример функциональных режимов.
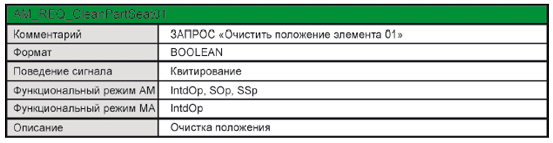 |
Рисунок 7 - Пример функциональных режимов
Система автоматического обслуживания машины будет отправлять сигнал только в том случае, если она находится в функциональном режиме IntdOp, SOp или SSp, независимо от режима работы машины.
Машина будет реагировать на сигнал системы автоматического обслуживания машины, только если она находится в функциональном режиме IntdOp.
4.2.6.2.7 Значение PFHD
Значение PFHD существует исключительно для сигналов интерфейса безопасности.
На рисунке 8 показан пример значения PFHD для сигналов интерфейса безопасности.
Рисунок 8 - Пример значения PFHD для сигнала интерфейса безопасности
4.2.6.2.8 Описание
Поле является дополнением к полю комментария.
На рисунке 9 показан пример описания сигнала.
 |
Рисунок 9 - Пример описания сигнала
4.2.7 Индекс сигналов, связанных с элементами
Настоящий стандарт определяет, что один или несколько элементов могут загружаться/разгружаться в одной области интерференции. Следовательно, сигналы, связанные с элементами, должны иметь индекс (01, 02, ...).
4.2.8 Обмен сигналами
4.2.8.1 Общие положения
Интерфейс функциональной единицы должен предоставлять/принимать все сигналы выбранного класса соответствия и выбранных параметров соответствия.
Настоящий стандарт определяет обмен сигналами в интерфейсах и взаимосвязь сигналов. Настоящий стандарт не определяет функции (каналы) функциональной единицы.
4.2.8.2 Использование атрибута функционального режима
4.2.8.2.1 Система автоматического обслуживания машин отправляет сигнал на машину.
Атрибут "Функциональный режим AM" определяет, при каких функциональных режимах система автоматического обслуживания машин должна отправлять сигнал. Атрибут "Функциональный режим МА" определяет, при каких функциональных режимах машина должна принимать сигнал.
4.2.8.2.2 Машина отправляет сигнал в систему автоматического обслуживания машин.
Атрибут "Функциональный режим MA" определяет, при каких функциональных режимах машина должна отправлять сигнал. Атрибут "Функциональный режим AM" определяет, при каких функциональных режимах система автоматического обслуживания машин должна принимать сигнал.
4.2.8.3 Запрос
4.2.8.3.1 Правило
Запрос должен быть подтвержден. Тип сигнала на стороне получателя определяет обратный сигнал как подтверждение или как состояние.
4.2.8.3.2 Введение получателя в функцию
4.2.8.3.2.1 Возможность выполнения функции
Получатель функциональной единицы подтверждает входящий запрос согласно введенной функции вместе с сигналом подтверждения или состояния.
4.2.8.3.2.2 Невозможность выполнения функции
Получатель запроса не может выполнить введенную функцию, поэтому запрос подтверждается отрицательно.
4.2.8.3.3 Отсутствие введения получателя в функцию
4.2.8.3.3.1 Общие положения
Получатель должен подтвердить входящий запрос определенным образом, в зависимости от того, определен обратный сигнал как подтверждение или состояние.
Пример - Интерфейс сигнализации установлен с параметром соответствия "Центральные функции". Интерфейс включает функцию WarmUp. Система автоматического обслуживания машин отправляет запрос AM_REQ_WarmUp. Получатель запроса отвечает состоянием MA_STA_WarmedUp. Это применимо, даже если функция WarmUp не реализована.
4.2.8.3.3.2 Подтверждение сигналом подтверждения
Сигнал запроса соединяется с обратным сигналом подтверждения в функциональной единице.
На рисунке 10 показан пример подтверждения запроса сигналом подтверждения.
 |
Рисунок 10 - Пример подтверждения запроса сигналом подтверждения
4.2.8.3.3.3 Подтверждение сигналом состояния
Получатель функциональной единицы может отправлять сигнал состояния постоянно, не меняя его значения.
На рисунке 11 показан пример подтверждения запроса сигналом состояния.
 |
Рисунок 11 - Пример подтверждения запроса сигналом состояния
4.2.8.4 ENA
Сигналы типа ENA (Доступно) дают разрешение получателю функциональной единицы от отправителя функциональной единицы на работу в соответствующей области.
4.2.8.5 INF
В противоположность сигналам STATE сигналы INF (Информация) предоставляют ту информацию, которая не предназначена для управления функциональной единицей.
4.2.8.6 MPA
Сигналы MPA (Консоль машины) сообщают о состоянии функциональной единицы. Данный тип сигнала применяется только при параметре соответствия "Консоль машины".
Если ни одна из функций не введена в сигнал MPA, сигнал должен быть установлен в логическое значение "0".
Действия, выполняемые функциональной единицей, принимающей сигнал MPA, не определены в настоящем стандарте.
4.2.8.7 DAT
Сигналы DAT (Данные) сообщают пакет информации получателю функциональной единицы.
5 Документация
Должна быть документально оформлена следующая информация:
- характеристика интерфейса для класса соответствия 1, класса соответствия 2 или класса соответствия 3;
- выполненные параметры соответствия;
- распределение адресов;
- расширение сигналов (если применимо).
Приложение А
(справочное)
Примеры
А.1 Согласованность машины, системы обслуживания машины и автоматического обслуживания машины
На рисунке A.1 показана согласованность машины, системы обслуживания машины и автоматическое обслуживание машины.
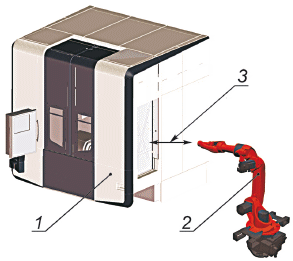 |
1 - машина (устройство); 2 - система обслуживания машины (устройство); 3 - автоматическое обслуживание машины (процесс)
Рисунок A.1 - Согласованность машины, системы обслуживания машины и автоматического обслуживания машины
А.2 Область интерференции, передаточная станция, препозиция области интерференции
На рисунке A.2 показаны станок и система автоматического обслуживания машин. Станочный участок находится на левой стороне станка. Представленный станок оснащен системой прямой загрузки, имеющей передаточную станцию на правом конце и область препозиции между передаточной станцией и станочным участком. Система автоматического обслуживания машин забирает или размещает детали с передаточной станции. Такие конструкции могут быть использованы для оптимизации времени цикла путем отключения синхронизации по времени машины и системы автоматического обслуживания машины.
Примечание - Существуют машины без передаточной станции.
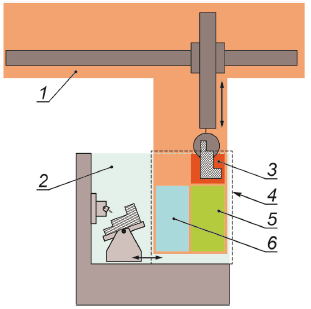 |
1 - диапазон системы автоматического обслуживания машины; 2 - диапазон машины; 3 - препозиция области интерференции системы автоматического обслуживания машин; 4 - область интерференции; 5 - расположение передаточной станции; 6 - препозиция области интерференции машины
Рисунок A.2 - Область интерференции, передаточная станция, препозиция области интерференции
A.3 Станок с доступом для загрузки
На рисунке A.3 представлен станок с доступом для загрузки в виде загрузочной двери.
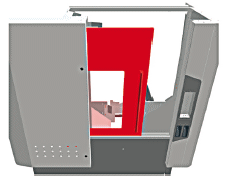 |
Рисунок A.3 - Пример станка с доступом для загрузки в виде загрузочной двери
На рисунке A.4 представлен станок с доступом для загрузки в виде загрузочного люка.
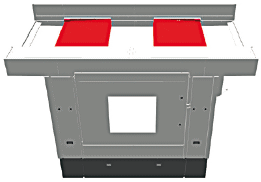 |
Рисунок A.4 - Пример станка с доступом для загрузки в виде загрузочного люка
Приложение ДА
(справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Таблица ДА.1
Структура настоящего стандарта | Структура международного стандарта ISO 21919-1:2019 |
1 Область применения | 1 Область применения |
- | 2 Нормативные ссылки |
2 Термины и определения (3) | 3 Термины и определения |
3 Сокращения | - |
4 Описание интерфейсов | 4 Описание интерфейсов |
5 Документация | 5 Документация |
Приложение А (справочное) Примеры | Приложение А (справочное) Примеры |
Приложение ДА Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта | - |
- | Библиография |
Примечание - После заголовков разделов настоящего стандарта приведены в скобках номера аналогичных им разделов международного стандарта ИСО 21919-1:2019. | |
УДК 004.738:006.354 | ОКС 25.040.020 | ||
Ключевые слова: умное производство, интерфейсы для ухода, автоматизированная машина | |||
