
ГОСТ Р МЭК 62458-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Оборудование звуковых систем
ЭЛЕКТРОАКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Измерение параметров в режиме больших сигналов
Sound system equipment. Electroacoustical transducers. Measurement of large signal parameters
ОКС 33.160.50
Дата введения 2018-09-01
Предисловие
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией "Научно-технический центр сертификации электрооборудования" "ИСЭП" (АНО "НТЦСЭ "ИСЭП") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 452 "Безопасность аудио-, видео-, электронной аппаратуры, оборудования информационных технологий и телекоммуникационного оборудования"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2017 г. N 1724-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 62458:2010* "Оборудование звуковых систем. Электроакустические преобразователи. Измерение параметров в режиме больших сигналов" (IEC 62458:2010 "Sound system equipment - Electroacoustical transducers - Measurement of large signal parameters", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Апрель 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение к международному стандарту
1) Международная электротехническая комиссия (МЭК) является международной организацией по стандартизации, объединяющей все национальные электротехнические комитеты (национальные комитеты МЭК). Задача МЭК - продвижение международного сотрудничества во всех вопросах, касающихся стандартизации в области электротехники и электроники. Результатом этой работы и в дополнение к другой деятельности МЭК является издание международных стандартов, технических требований, технических отчетов, публично доступных технических требований (PAS) и руководств (в дальнейшем именуемых "публикации МЭК"). Их подготовка поручена Техническим комитетам. Любой национальный комитет МЭК, заинтересованный в объекте рассмотрения, с которым имеет дело, может участвовать в предварительной работе. Международные, правительственные и неправительственные организации, сотрудничающие с МЭК, также принимают участие в этой подготовке. МЭК близко сотрудничает с Международной организацией по стандартизации (ИСО) в соответствии с условиями, определенными соглашением между этими двумя организациями.
2) В формальных решениях или соглашениях МЭК выражено положительное решение технических вопросов, практически консенсус на международном уровне в соответствующих областях, так как в составе каждого Технического комитета есть представители от национальных комитетов МЭК.
3) Публикации МЭК принимаются национальными комитетами МЭК в качестве рекомендаций. Приложены максимальные усилия для того, чтобы гарантировать правильность технического содержания публикаций МЭК, однако МЭК не может отвечать за порядок их использования или за неверное толкование конечным пользователем.
4) В целях содействия международной гармонизации, национальные комитеты МЭК обязуются применять публикации МЭК в их национальных и региональных публикациях с максимальной степенью приближения к исходным. Любые расхождения между любой публикацией МЭК и соответствующей национальной или региональной публикацией должно быть четко обозначено в последней.
5) МЭК не устанавливает процедуры маркировки знаком одобрения и не берет на себя ответственность за любое оборудование, о котором заявляют, что оно соответствует публикации МЭК.
6) Все пользователи должны быть уверены, что они используют последнее издание этой публикации.
7) МЭК или его директора, служащие или агенты, включая отдельных экспертов и членов его Технических комитетов и национальных комитетов МЭК, не несут никакой ответственности за причиненные телесные повреждения, материальный ущерб или другое повреждение любой природы вообще, как прямое так и косвенное, или за затраты (включая юридические сборы) и расходы, проистекающие из использования публикации МЭК, или ее разделов, или любой другой публикации МЭК.
8) Следует обратить внимание на нормативные ссылки, указанные в настоящем стандарте. Использование ссылочных международных стандартов является обязательным для правильного применения настоящего стандарта.
9) Следует обратить внимание на то, что имеется вероятность того, что некоторые из элементов настоящего стандарта являются объектами авторского права. Настоящий стандарт не несет ответственности за идентификацию любых таких патентных прав.
МЭК 62458 подготовлен техническим комитетом 100 МЭК "Аудио, видео и мультимедийные системы и оборудование".
Настоящее первое издание отменяет и заменяет документ IEC/PAS 62458, опубликованный в 2008. Стандарт является техническим пересмотром. Основные изменения приведены ниже:
- описания методов измерения приведены в соответствие с современным уровнем технологий;
- добавлены разделы с 4 по 15;
- приложение А интегрировано в основную часть стандарта;
- произведен полный пересмотр всего текста.
Текст настоящего стандарта основан на следующих документах:
Окончательный проект международного стандарта | Отчет о голосовании |
100/1624/FDIS | 100/1647/RVD |
Полную информацию о голосовании по одобрению настоящего стандарта можно найти в отчете о голосовании, указанном в приведенной выше таблице.
Настоящая публикация разработана в соответствии с Директивами ИСО/МЭК, часть 2.
Комитет принял решение, что содержание настоящего стандарта останется без изменений до конечной даты сохранения, указанной на сайте МЭК с адресом http://webstore.iec.ch в данных, касающихся конкретного стандарта. На это время стандарт будет:
- подтвержден заново;
- аннулирован;
- заменен пересмотренным изданием;
- изменен.
Введение
Электроакустические преобразователи, такие как задающие блоки громкоговорителей, акустические системы, наушники, микродинамики, акустические вибраторы и другие источники сигналов, при повышенных амплитудах работают в нелинейном режиме. Это ограничивает акустический выходной сигнал и генерирует искажение нелинейных сигналов. Линейные модели не могут описать характер поведения больших сигналов таких преобразователей, поэтому были разработаны расширенные модели, учитывающие доминирующие нелинейности в двигателе и подвеске. Свободные параметры модели большого сигнала должны быть измерены на конкретном преобразователе с использованием статических или динамических методов. Параметры больших сигналов непосредственным образом показывают физическую причину искажения сигналов и имеют большое значение для объективной оценки качества звука и диагностики неисправностей в процессе разработки и производства. Кроме того, модель и параметры, определенные для конкретного преобразователя, являются основой для прогнозирования максимального выходного сигнала и искажения сигнала при любом входном сигнале. Тесная взаимосвязь между причинами и внешними признаками упрощает интерпретацию гармонических и интермодуляционных искажений, измеренных в соответствии с МЭК 60268-5. Параметры больших сигналов представляют собой ценные входные данные для синтеза акустических систем и разработки электрических систем управления для громкоговорителей.
1 Область применения
Настоящий стандарт распространяется на электроакустические преобразователи, такие как задающие блоки громкоговорителей, акустические системы, наушники, микродинамики, акустические вибраторы и другие источники сигналов, использующие либо электродинамический, либо электромагнитный мотор, соединенный с механической подвеской. Динамические характеристики сильных сигналов преобразователя моделируют посредством модели с сосредоточенными параметрами, учитывающей доминирующие нелинейности, такие как коэффициент силы, жесткость и индуктивность, как показано на рисунке 1.
Настоящий стандарт устанавливает основные термины и параметры модели, методы измерений и способы представления результатов измерений.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
IEC 60268-1, Sound system equipment - Part 1: General (Оборудование звуковых систем. Часть 1. Общие положения)
IEC 60268-5:2003, Sound system equipment - Part 5: Loudspeakers (Оборудование звуковых систем. Часть 5. Громкоговорители)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
3.1 электромеханическая эквивалентная схема (electro-mechanical equivalent circuit): Электрическая схема электродинамического преобразователя в соответствии с показанным на рисунке 1.
3.2 входной ток i и напряжение u (input current i and voltage u): Электрические переменные состояния на выводах преобразователя.
3.3 смещение х (displacement х): Отклонение звуковой катушки от исходного положения.
3.4 скорость v (velocity v): Временная производная смещения х.
3.5 сопротивление постоянному току (d.c. resistance
): Электрический импеданс
при очень низких частотах, где можно пренебречь эффектом обратной ЭДС.
Примечание - Электрический импеданс может использоваться для измерения сопротивления по постоянному току звуковой катушки. Сопротивление по постоянному току
зависит от средней температуры звуковой катушки
.
|

Примечание 1 - Настоящий рисунок показывает пример модели с сосредоточенными параметрами электродинамического преобразователя с учетом доминирующих нелинейностей.
Примечание 2 - Могут применяться другие эквивалентные схемы. В противоположность результатам линейного моделирования некоторые параметры сосредоточенных элементов не являются постоянными, а зависят от мгновенных значений переменных состояния (таких как смещение х, скорость v, ток i).
Рисунок 1 - Электродинамический преобразователь
3.6 нелинейная индуктивность и потери (nonlinear inductance and losses): Нелинейные элементы для моделирования влияния магнитного поля переменного тока, потери в магнетике, а также потери, вызванные вихревыми токами, где эквивалентная схема на рисунке 1 использует модель LR-2, включающую в себя индуктивность (х,
), индуктивность
(х,
) и дополнительное сопротивление
(х,
).
3.7 нелинейный коэффициент силы ![]() [nonlinear force factor
[nonlinear force factor ![]() : Зависимость мгновенного коэффициента силы
: Зависимость мгновенного коэффициента силы ![]() от смещения звуковой катушки х, определяемая интегралом от плотности магнитного потока В по отношению к проводнику звуковой катушки длиной
от смещения звуковой катушки х, определяемая интегралом от плотности магнитного потока В по отношению к проводнику звуковой катушки длиной .
Примечание - Произведение коэффициента силы ![]() и скорости v является обратной ЭДС, генерируемой на электрической стороне эквивалентной схемы, как показано на рисунке 1. Произведение коэффициента силы
и скорости v является обратной ЭДС, генерируемой на электрической стороне эквивалентной схемы, как показано на рисунке 1. Произведение коэффициента силы ![]() и входного тока i дает электродинамическую движущую силу механической системы.
и входного тока i дает электродинамическую движущую силу механической системы.
3.8 реактивная сила [(reluctance force
): Дополнительная электромагнитная движущая сила, вызванная переменными индуктивностями смещения
![]() и
и ![]() .
.
3.9 жёсткость подвески ![]() [stiffness
[stiffness ![]() , of the suspension]: Соотношение между мгновенной восстанавливающей силой F(x) и смещением х, заданное уравнением
, of the suspension]: Соотношение между мгновенной восстанавливающей силой F(x) и смещением х, заданное уравнением
![]() . (1)
. (1)
Примечание - Нелинейная упругая деформация ![]() является обратной величиной механической жесткости.
является обратной величиной механической жесткости.
3.10 механическая масса (mechanical mass
): Общая подвижная масса, включая массу подвижной сборки и реактивную составляющую воздушной нагрузки с обеих сторон диафрагмы.
3.11 механическое сопротивление (mechanical resistance
): Неэлектрические потери в динамике из-за подвески, вихревых потоков и излучений.
3.12 механический импеданс (mechanical impedance
): Механический импеданс, который может представлять любую дополнительную нагрузку, вызванную механическими элементами (диффузором, панелью) или акустическими элементами (такими как вентилируемый кожух или рупорный громкоговоритель).
4 Испытательные сигналы
4.1 Общие положения
Для измерения параметров больших сигналов требуются электрические, механические или акустические входные сигналы. В зависимости от метода, используемого для измерения параметров больших сигналов, в качестве входного сигнала для подачи к преобразователю используют испытательные сигналы различного вида. Поскольку громкоговоритель работает как система, изменяющаяся во времени, входной сигнал может вызвать постоянное или временное изменение свойств громкоговорителя. В связи с этим, должны быть установлены свойства входного сигнала (ширина спектра, пик-фактор, плотность распределения вероятности). При необходимости сравнения числовых значений результатов двух измерений должны быть использованы одинаковые входные сигналы.
4.2 Большие сигналы постоянного тока
Постоянное напряжение постоянного тока или ток постоянного напряжения определенной величины и достаточной продолжительности подается на электрические клеммы для измерения установившейся реакции преобразователя. Если преобразователь установлен в герметичном корпусе, то в качестве входного сигнала постоянного тока может использоваться разница между статическим воздушным давлением внутри и снаружи корпуса.
4.3 Большие сигналы постоянного тока и слабые сигналы переменного тока
Постоянный сигнал постоянного тока определенной величины и достаточной продолжительности (см. 4.2) с наложением слабого сигнала переменного тока используются в качестве входного сигнала. Сигнал переменного тока (такие как шум, синусоидальное колебание, импульсные испытательные сигналы) должен обладать достаточной шириной спектра для определения всех параметров модели громкоговорителя.
4.4 Широкополосный сигнал шума
В качестве входного сигнала может быть использован один из сигналов шума, определенных в МЭК 60268-1, или любой другой шум с достаточной шириной спектра и амплитудой. Для уменьшения ограничения в усилителе значение пик-фактора шума должно быть менее четырех.
4.5 Музыка
Обыкновенная музыка, речь достаточной ширины спектра и амплитуды может использоваться в качестве входного сигнала.
Примечание - Для правильного определения параметров с помощью динамических методов требуется обеспечить постоянную подачу входного сигнала к акустической системе. Входной сигнал должен иметь достаточное количество спектральных составляющих, по меньшей мере, на одну октаву ниже резонансной частоты и на одну декаду выше
.
5 Условия установки
5.1 Задающие блоки
Задающий блок может быть установлен:
a) в потоке воздуха без дефлектора или корпуса;
b) в стандартном дефлекторе в соответствии с 11.1 МЭК 60268-5;
c) в полупространстве свободного поля в соответствии с 5.2 МЭК 60268-5;
d) в стандартном корпусе для измерений (типа А или В) в соответствии с 11.2 МЭК 60268-5 или в другом указанном корпусе;
e) в вакууме;
f) в другой конфигурации, заданной в представлении результатов.
Акустическая нагрузка зависит от установочной конструкции, четкое описание которой должно содержаться в представлении результатов.
Для подавления дополнительных механических резонансов, близких к резонансной частоте , во время измерения преобразователь должен быть надежно зафиксирован. Во избежание каких-либо расхождений из-за веса подвижной сборки рекомендуется установить преобразователь в вертикальное положение (сместить диффузор в горизонтальном направлении).
Для снижения акустической нагрузки, подавления дополнительных акустических резонансов и во избежание нелинейного затухания из-за турбулентных потоков воздуха желательно проводить измерение задающих блоков в вакууме для рупорных громкоговорителей, наушников, микро-динамиков и микрофонов.
5.2 Акустические системы
Измерение акустических систем проводится в условиях, соответствующих условиям предполагаемого использования.
6 Климатические условия
Во избежание возможного влияния температуры и влажности на свойства подвески задающего блока измерения должны проводиться при температуре окружающей среды от 15°C до 35°C, предпочтительно при 20°C, при относительной влажности от 25% до 75% и давлении воздуха от 86 до 106 кПа, как указано в МЭК 60268-1.
7 Акустические условия окружающей среды
Помещение для измерения должно быть достаточно большим для того, чтобы влиянием внешних акустических условий на механическую вибрацию преобразователя можно было пренебречь.
Если измерение параметров больших сигналов основывается на выходном сигнале звукового давления, рекомендуется поместить микрофон для измерения в ближнем поле преобразователя. Рекомендуется использовать метод, с помощью которого измеряются только электрические или только механические сигналы, которые являются невосприимчивыми к нежелательному акустическому шуму.
8 Предварительное выравнивание режима
Громкоговоритель должен пройти предварительную подготовку в соответствии с разделом 12 МЭК 60268-5. Временный сдвиг звуковой катушки, вызванный хранением преобразователя в течение некоторого времени в горизонтальном положении, может быть устранен путем функционирования преобразователя в течение не менее пяти минут в вертикальном положении перед выполнением регулярного измерения.
9 Свойства громкоговорителя, изменяющиеся во времени
Входной сигнал, который подается на электрический вход громкоговорителя, может вызвать нагревание звуковой катушки, а также изменить свойства подвески во время измерения. Таким образом, во время измерения необходимо измерить электрическое сопротивление катушки и учитывать его при расчете параметров громкоговорителя (например, коэффициент электрических потерь ).
10 Методы измерений
10.1 Общие положения
Для измерения параметров больших сигналов могут быть использованы нижеприведенные методы. Вместе с результатами должен быть указан используемый метод.
10.2 Статический или квазистатический методы
10.2.1 Общие положения
Настоящую технологию измерений применяют для определения нелинейных параметров преобразователя при помощи использования сигнала постоянного тока величиной (как правило, напряжения) в качестве входного сигнала. После достижения установившегося состояния измеряют соответствующие переменные состояния (смещение постоянного тока
, силу постоянного тока
), и вычисляют значения параметров [например,
![]() ]. Измерение повторяют после изменения величины сигнала постоянного тока в следующих рабочих точках
]. Измерение повторяют после изменения величины сигнала постоянного тока в следующих рабочих точках , где i=1,....N для измерения нелинейных параметров в пределах рабочего диапазона
![]() с достаточным разрешением.
с достаточным разрешением.
Из-за вязкоупругого характера материала подвески время установления, необходимое для достижения установившегося состояния, может превышать несколько секунд, а статический метод может занимать большое количество времени. При использовании квазистатического метода переменные состояния измеряют до достижения установившегося состояния, при этом следует указать используемое время установления.
Ползучесть и другие вязкоупругие свойства подвески вызывают значительные расхождения между значениями жесткости K(х), измеренной статически с помощью сигнала постоянного тока, и жесткости ![]() , измеренной динамически с помощью сигнала широкополосного шума.
, измеренной динамически с помощью сигнала широкополосного шума.
Сигнал постоянного тока статических и квазистатических методов не может использоваться для измерения нелинейной индуктивности звуковой катушки ![]() . На рисунке 2 показана установка для статического и квазистатического измерений параметров больших сигналов.
. На рисунке 2 показана установка для статического и квазистатического измерений параметров больших сигналов.
|
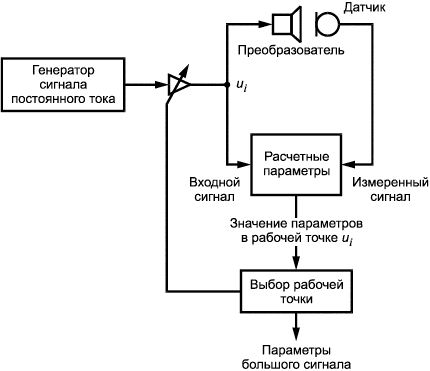
Рисунок 2 - Установка для статического и квазистатического измерений
10.2.2 Процедура
Выполнить следующие действия:
а) в соответствии с анализом пределов рабочего диапазона ![]() и требуемым разрешением определить количество измерений N, выбрать начальное напряжение
и требуемым разрешением определить количество измерений N, выбрать начальное напряжение и определить возрастающее напряжение
;
b) инициализировать первую рабочую точку i=1;
c) подать к преобразователю напряжение сигнала постоянного тока ![]() ;
;
d) после достижения преобразователем установившегося состояния или прохождения заданного времени установления T измерить смещение и другие соответствующие переменные состояния (например, силу
) в рабочей точке i;
e) рассчитать нелинейный параметр (например, ![]() );
);
f) выбрать следующую рабочую точку i=i+1 и повторить предыдущие шаги с 1 по 5 до i>N;
g) интерполировать значения параметров между рабочими точками , где i=1, ..., N или вычислить коэффициенты разложения в степенной ряд [используя уравнение (3)].
10.3 Точечный динамический метод
10.3.1 Общие положения
Настоящую технологию измерений применяют для определения нелинейных параметров преобразователя при помощи использования сигнала постоянного тока (например, постоянного напряжения или постоянного давления воздуха) с наложением слабого сигнала переменного тока
в качестве входного сигнала. После достижения установившегося состояния измеряют соответствующие переменные состояния (смещение постоянного тока
и амплитуды силы переменного
и смещения переменного тока
), и вычисляют значения параметров (например, возрастающая жесткость
![]() ). Измерение повторяют после изменения величины составляющей постоянного тока входного сигнала в следующих рабочих точках
). Измерение повторяют после изменения величины составляющей постоянного тока входного сигнала в следующих рабочих точках , где i=1, ..., N для измерения нелинейных параметров в пределах рабочего диапазона
![]() с достаточным разрешением.
с достаточным разрешением.
Амплитуда входного сигнала переменного тока достаточно мала для того, чтобы гарантировать линейный характер работы преобразователя [
![]() постоянная,
постоянная, ![]() постоянная и
постоянная и ![]() постоянная] и возможность применения линейной модели громкоговорителя.
постоянная] и возможность применения линейной модели громкоговорителя.
В то время как некоторые параметры слабых сигналов [коэффициент силы ![]() и индуктивность
и индуктивность ![]() ] совпадают с параметрами больших сигналов, измеренных с помощью других методов, с помощью данного метода можно получить возрастающую жесткость
] совпадают с параметрами больших сигналов, измеренных с помощью других методов, с помощью данного метода можно получить возрастающую жесткость ![]() , которая может быть преобразована в обычную жесткость только интегрированием
, которая может быть преобразована в обычную жесткость только интегрированием
 . (2)
. (2)
Из-за вязкоупругого характера материала подвески существуют значительные расхождения между значениями жесткости K(х), измеренной методом измерения по точкам с помощью сигнала постоянного тока, и жесткости ![]() , измеренной динамически с помощью программы подобной сигналу переменного тока. На рисунке 3 показана установка для динамического измерения по точкам параметров больших сигналов.
, измеренной динамически с помощью программы подобной сигналу переменного тока. На рисунке 3 показана установка для динамического измерения по точкам параметров больших сигналов.
10.3.2 Испытательное оборудование
Входной сигнал, включающий в себя составляющую постоянного тока и составляющую переменного тока, может быть получен с помощью генератора со сдвигом постоянного тока в комплекте с усилителем мощности постоянного тока. Однако, подача составляющей постоянного тока через электрический вход вызывает значительное нагревание звуковой катушки при высоких амплитудах. В качестве альтернативы, преобразователь может быть установлен в герметичной камере, а положение звуковой катушки может быть изменено путем изменения воздушного давления постоянного тока внутри камеры.
|
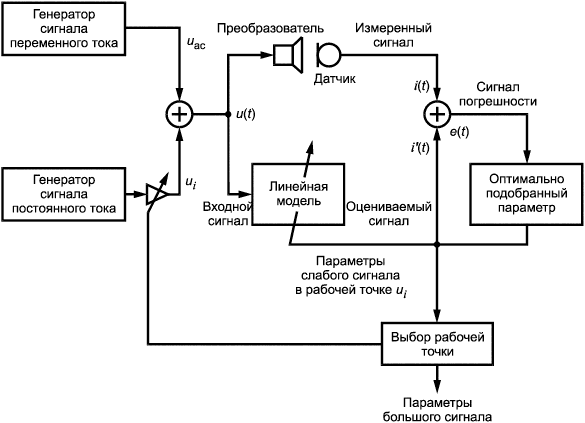
Рисунок 3 - Установка для измерения параметров больших сигналов с помощью точечного динамического метода
10.3.3 Процедура
В соответствии с анализом пределов рабочего диапазона ![]() и требуемым разрешением определить количество измерений N, начальное напряжение
и требуемым разрешением определить количество измерений N, начальное напряжение и возрастающее напряжение
. Выбрать первую рабочую точку i=1.
Выполнить следующие действия:
a) подать к преобразователю входной сигнал ![]() ;
;
b) после достижения преобразователем установившегося состояния или прохождения заданного времени установления T, измерить смещение постоянного тока и переменные состояния переменного тока (например, силу переменного тока
и смещение переменного тока
) в рабочей точке i;
c) рассчитать параметры слабых сигналов (такие как ![]() ) в определенной рабочей точке
) в определенной рабочей точке с помощью линейной модели, оптимально приспособленной к измеряемому сигналу;
d) выбрать следующую рабочую точку i=i+1 и повторить предыдущие этапы с 1 по 3 до i>N.
e) интерполировать значения параметров между рабочими точками , где i=1, ..., N или вычислить коэффициенты разложения в степенной ряд [используя уравнение (3)].
10.4 Полный динамический метод
10.4.1 Общие положения
Полный динамический метод использует входной сигнал переменного тока достаточной амплитуды и ширины спектра, такой как музыка или аудио-сигнал (шум). Как правило, входной сигнал не включает в себя составляющую постоянного тока. Измеряемые переменные состояния (напряжение, ток, смещение) служат основанием для определения свободных параметров нелинейной модели (такой как модель с сосредоточенными параметрами на рисунке 1). На основании выявленных переменных состояний (таких как температура звуковой катушки) и нелинейностей преобразователя (жесткость ) амплитуда входного сигнала автоматически регулируется для обеспечения безопасной эксплуатации преобразователя при максимальных амплитудах
![]() и во избежание повреждения преобразователя. На рисунке 4 показана установка для динамического измерения параметров больших сигналов.
и во избежание повреждения преобразователя. На рисунке 4 показана установка для динамического измерения параметров больших сигналов.
|

Рисунок 4 - Установка для динамического измерения параметров больших сигналов
10.4.2 Требования
Требуется источник сигнала, обеспечивающий аудио-сигнал, который подается через усилитель мощности к выводам (клеммам) громкоговорителя. Датчик необходим для контроля, по меньшей мере, одной переменной состояния (например, тока) громкоговорителя. Система обработки сигналов требуется для моделирования взаимосвязи между входным сигналом (например, напряжением) и контролируемой переменной состояния (например, током), а также для расчета оптимальных параметров с помощью метода выравнивания.
10.4.3 Процедура
Выполнить следующие действия:
а) подать сигнал широкополосного шума малой амплитуды через усилитель мощности к клеммам громкоговорителя (напряжение питания);
b) измерить электрический входной ток i на клеммах или другие сигналы состояния (смещение или звуковое давление) с помощью механического или акустического датчика;
c) определить потенциальный входной ток с помощью нелинейной модели преобразователя (такой как модель с сосредоточенными параметрами на рисунке 1). Вычислить сигнал погрешности
![]() и оценить свободные параметры посредством минимизации сигнала погрешности e(t);
и оценить свободные параметры посредством минимизации сигнала погрешности e(t);
d) получить пределы смещения и
из уравнений (4) и (7). Оценить рост температуры звуковой катушки
путем контроля сопротивления по постоянному току
катушки;
e) увеличивать амплитуду входного сигнала до тех пор, пока пиковое смещение не превысит смещение
, ограниченное коэффициентом силы или смещение
, ограниченное податливостью, или пока рост температуры звуковой катушки
не превысит допустимые пределы;
f) необходимо проверить адекватность моделирования и оптимального выравнивания параметров путем расчета средней квадратичного значения погрешности между измеренной и смоделированной реакцией (такой как ток, скорость, смещение).
11 Нелинейный коэффициент силы
11.1 График зависимости коэффициента силы от смещения 
11.1.1 Подлежащая определению характеристика
Нелинейный коэффициент силы BI(x) предпочтительно регистрировать как графическое представление, показывающее параметр как функцию смещения х, в пределах измеряемого диапазона ![]() . Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения табличкой со словесным комментарием.
. Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения табличкой со словесным комментарием.
11.1.2 Метод измерения
11.1.2.1 Общие положения
Коэффициент силы может быть измерен статическим, полным динамическим или динамическим методом измерения по точкам, как это определено в разделе 10. Используемый метод должен быть указан.
11.1.2.2 Коэффициенты разложения коэффициента силы
Коэффициенты , где j= 0, 1, ..., N при разложении в степенной ряд кривой коэффициента силы
![]() (3)
(3)
должны быть указаны с пиковым смещением , описывающим пределы диапазона установки
![]() .
.
11.2 Смещение, ограниченное коэффициентом силы 
11.2.1 Подлежащая определению характеристика
Уменьшение значения , вызванное движением катушки от исходного положения покоя х=0, ограничивает максимальное пиковое смещение. Пиковое смещение
, ограниченное коэффициентом силы косвенно определяется условием минимального отношения коэффициента силы равного заданному пороговому значению
.
![]() . (4)
. (4)
Рекомендуется использовать пороговое значение ![]() =82%, соответствующее 10% искажению модуляции в соответствии с разделом 24 МЭК 60268-5 для двухтонального сигнала, включающего в себя один тон на резонансной частоте
=82%, соответствующее 10% искажению модуляции в соответствии с разделом 24 МЭК 60268-5 для двухтонального сигнала, включающего в себя один тон на резонансной частоте ![]() и второй тон на
и второй тон на ![]() .
.
Пиковое значение должно быть указано с использованием минимального отношения коэффициента силы
, например
=3 мм при
=82%.
11.2.2 Метод измерения
Смещение, ограниченное коэффициентом силы должно быть измерено по графику зависимости нелинейного коэффициента силы от смещения в соответствии с 11.1.2. Следует определить значение ![]() в исходном положении покоя и умножить его на пороговое значение минимального отношения коэффициента силы (например, при
в исходном положении покоя и умножить его на пороговое значение минимального отношения коэффициента силы (например, при =82%).
|

Рисунок 5 - Определение максимального пикового смещения , ограниченного только коэффициентом силы
11.3 Точка симметрии 
11.3.1 Подлежащая определению характеристика
Точка симметрии на кривой описывает центральную точку между двумя точками на кривой имеющими одинаковое значение
![]() . (5)
. (5)
отделенными друг от друга на . Зависимость точки симметрии
![]() от смещения
от смещения должна быть приведена в виде кривой, как показано на рисунке 6.
|
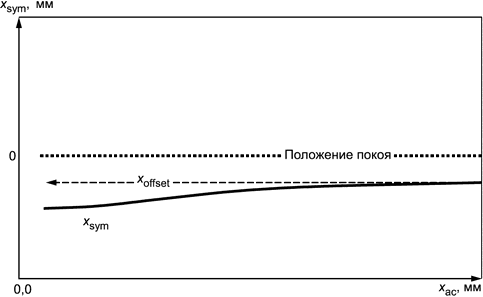
Рисунок 6 - Определение по графику значения сдвига звуковой катушки от точки симметрии ![]()
11.3.2 Метод измерения
Как показано на рисунке 7, необходимо выбрать значение , которое будет меньше
![]() , и определить соответствующие значения смещения
, и определить соответствующие значения смещения и
при
![]() расположенных с двух сторон от максимального значения
расположенных с двух сторон от максимального значения . Затем рассчитать точку симметрии
![]() и смещение
и смещение ![]() . Процедуру повторить для меньших значений
. Процедуру повторить для меньших значений .
|
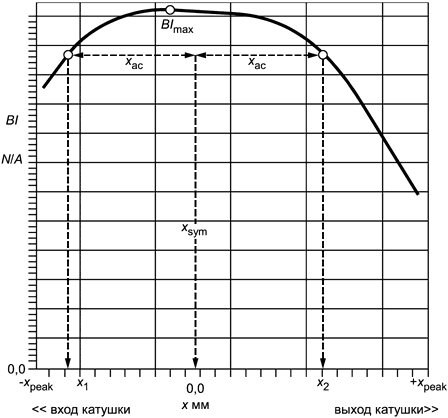
Рисунок 7 - Определение точки симметрии характеристики нелинейного коэффициента силы
![]()
11.4 Сдвиг звуковой катушки 
Сдвиг звуковой катушки является точкой симметрии
![]() для верхнего значения
для верхнего значения ![]() для оценки симметрии на крутых участках кривой
для оценки симметрии на крутых участках кривой . Сдвиг звуковой катушки
регистрируют совместно с амплитудой
, например
=0,4 мм при
=5,2 мм.
Примечание - Если точка симметрии значительно изменяется в зависимости от смещения (![]() постоянная), асимметрия кривой
постоянная), асимметрия кривой обусловлена геометрией магнитного поля и не может быть компенсирована с помощью сдвига катушки.
12 Нелинейная жесткость
12.1 График зависимости нелинейной жесткости от смещения 
12.1.1 Подлежащая определению характеристика
Нелинейность подвески желательно регистрировать в виде графического представления жесткости, показывающее параметр ![]() как функцию смещения х в пределах измеряемого диапазона
как функцию смещения х в пределах измеряемого диапазона ![]() изображенного на рисунке 8. Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения словесным комментарием.
изображенного на рисунке 8. Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения словесным комментарием.
Примечание - Графическое представление нелинейной упругой деформации ![]() , которая является величиной обратной нелинейной жесткости
, которая является величиной обратной нелинейной жесткости ![]() затрудняет интерпретацию нелинейности при более высоких смещениях, где преобладает влияние нелинейности восстанавливающей силы.
затрудняет интерпретацию нелинейности при более высоких смещениях, где преобладает влияние нелинейности восстанавливающей силы.
12.1.2 Метод измерения
12.1.2.1 Общие положения
Характеристику жесткости желательно измерять с помощью полного динамического метода, как это определено в разделе 10, поскольку он наилучшим образом описывает характер подвески для входного аудиосигнала. Компонент постоянного тока входного сигнала, используемый в статическом, квазистатическом и методе измерения по точкам, вызывает существенные расхождения в значениях измеренной жесткости из-за вязкоупругого характера подвески.
12.1.2.2 Коэффициенты разложения жесткости
Коэффициенты *, где j=0, 1, ..., N при разложении в степенной ряд кривой жесткости, определенной как
________________
* Текст документа соответствует оригиналу. - .
![]() (6)
(6)
должны быть указаны совместно с пиковым смещением , описывающим пределы диапазона установки
![]() .
.
12.2 Смещение, ограниченное упругой деформацией 
12.2.1 Подлежащая определению характеристика
Снижение значения упругой деформации (податливости) подвески , вызванное движением катушки из исходного положения покоя х=0, ограничивает максимальное пиковое смещение. Ограниченное упругой деформацией смещение
косвенно определяется условием минимального отношения упругой деформации равной заданному пороговому значению
![]() . (7)
. (7)
Рекомендуется использовать пороговое значение =75%, соответствующее 10% гармонического искажения для синусоидального тона подаваемого сигнала при резонансной частоте
. Использованное предельное значение должно быть записано со смещением
, например
=2 мм при
=75%.
12.2.2 Метод измерения
Смещение, ограниченное упругой деформацией, определяют в соответствии с 12.1. Затем рассчитывают график податливости ![]() . Определяют значение
. Определяют значение ![]() в исходном положении и умножают на пороговое значение минимального коэффициента упругой деформации (например,
в исходном положении и умножают на пороговое значение минимального коэффициента упругой деформации (например, =75%). Значение
является наименьшим значением х, для которого
![]() .
.
12.3 Асимметрия жесткости 
12.3.1 Подлежащая определению характеристика
Зависимость асимметрии от смещения ![]() оценивают по единичному значению на графике
оценивают по единичному значению на графике
 %. (8)
%. (8)
Используют значения жесткости при отрицательных и положительных предельных значениях смещения ±, измеренные на графике
. Рекомендуется измерять
при высокой амплитуде, так чтобы
![]() . Пиковое смещение
. Пиковое смещение , использованное для определения значения асимметрии жесткости, также должно быть зарегистрировано при
=90% (
=5,5 мм).
|

Рисунок 8 - Определение значения асимметрии жесткости по графику зависимости ![]()
12.3.2 Метод измерения
Определить значения жесткости при положительном и отрицательном пиковом смещении на измерительном графике
![]() как показано на рисунке 8. Затем рассчитать асимметрию жесткости
как показано на рисунке 8. Затем рассчитать асимметрию жесткости * с помощью уравнения (8)*.
________________
* Текст документа соответствует оригиналу. - .
13 Индуктивность, зависимая от смещения 
13.1 График зависимости индуктивности от смещения 
13.1.1 Подлежащая определению характеристика
Нелинейность индуктивности предпочтительно регистрировать как графическое представление, показывающее параметр индуктивности как функцию смещения х в пределах измеряемого диапазона
![]() при отсутствии входного тока (i=0). Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения словесным комментарием.
при отсутствии входного тока (i=0). Положительное смещение х соответствует отклонению катушки от задней пластины. Для поддержания ориентации положения начала и конца обмотки катушки рекомендуется пометить ось смещения словесным комментарием.
13.1.2 Метод измерения
13.1.2.1 Общие положения
Характеристика кривой индуктивности может быть измерена полным динамическим или динамическим методом измерения по точкам, как это определено в разделе 10.
13.1.2.2 Коэффициенты разложения
Коэффициенты , где j=0, 1, ..., N при разложении в степенной ряд индуктивности
определенной как
![]() (9)
(9)
должны быть указаны совместно с пиковым смещением , описывающим пределы диапазона установки
![]() .
.
13.2 Смещение, ограниченное индуктивностью 
13.2.1 Подлежащая определению характеристика
Максимальное пиковое смещение ограничивает изменение электрического входного импеданса на более высоких частотах, обусловленное нелинейными элементами ,
![]() и
и ![]() в модели LR2, как показано на рисунке 1. Ограниченное индуктивностью смещение
в модели LR2, как показано на рисунке 1. Ограниченное индуктивностью смещение косвенно определяется максимальным изменением импеданса равным заданному пороговому значению
с использованием частоты
![]() , где
, где является резонансной частотой.
 . (10)
. (10)
Рекомендуется использовать пороговое значение =10%, соответствующее 10% искажению модуляции в соответствии с разделом 24 МЭК 60268-5 для двухтонального сигнала, включающего один тон на резонансной частоте
![]() и второй тон на
и второй тон на ![]() .
.
Пиковое значение должно быть указано совместно с пороговым значением максимального изменения использованного импеданса
, например
=3 мм при
=10%.
13.2.2 Метод измерения
Электрический входной импеданс ![]() измеряют при частоте
измеряют при частоте ![]() (с использованием резонансной частоты
(с использованием резонансной частоты ) с помощью полного динамического или динамического метода измерения по точкам в соответствии с разделом 10. Определяют пороговое значение для максимального изменения импеданса (например,
=10%). Значением
является наименьшее значение х, где
![]() .
.
14 Индуктивность, зависимая от тока 
14.1 Подлежащая определению характеристика
Нелинейность индуктивности предпочтительно регистрировать как графическое представление, показывающее параметр индуктивности как функцию от смещения i в пределах измеряемого диапазона
![]() без смещения катушки (х=0).
без смещения катушки (х=0).
14.2 Метод измерения
14.2.1 Общие положения
Нелинейность индуктивности должна измеряться полным динамическим методом, как это определено в разделе 10.
14.2.1.1 Коэффициенты разложения
Коэффициенты *, где j=0, 1, ..., N при разложении в степенной ряд индуктивности
, определенной как
________________
* Текст документа соответствует оригиналу. - .
![]() (11)
(11)
должны быть записаны вместе с пиковым током , описывающим пределы диапазона выравнивания
![]() .
.
15 Параметры, получаемые из геометрических размеров и характеристик
15.1 Максимальное пиковое смещение 
Максимальное пиковое смещение ![]() получается из нелинейного искажения, измеренного на выходном сигнале звукового давления.
получается из нелинейного искажения, измеренного на выходном сигнале звукового давления. ![]() определяют как пиковое смещение звуковой катушки, при котором максимальное значение общего гармонического искажения
определяют как пиковое смещение звуковой катушки, при котором максимальное значение общего гармонического искажения , либо искажения модуляции второго порядка
, либо искажения модуляции третьего порядка
при излучаемом звуковом давлении равно заданному пороговому значению d (использованному в качестве нижнего индекса в
![]() ), например,
), например, ![]() =3 мм при d=10%.
=3 мм при d=10%.
15.2 Метод измерения
15.2.1 Общие положения
На динамик подается сигнал линейной суперпозиции первого тона на резонансной частоте ![]() и второго тона на
и второго тона на ![]() с отношением амплитуд 4:1. Общее гармоническое искажение
с отношением амплитуд 4:1. Общее гармоническое искажение оценивает гармоники
, а искажения модуляции
и
измеряются в соответствии с разделом 24 МЭК 60268-5. Рекомендуется проводить измерение звукового давления в ближнем поле динамика и использовать пороговое значение d=10%.
15.2.2 Пиковое смещение , ограничиваемое геометрией двигателя
Пиковое смещение описывает идеальную линейностью конфигурации подвески или идеальную подвесную конфигурацию и определяется уравнением
![]() (12)*
(12)*
________________
* Формула соответствует оригиналу. - .
с использованием значений высоты катушки и глубины зазора
указанных изготовителем. Фактическим распределением магнитного поля в зазоре и за его пределами (в краевом поле) можно пренебречь.
15.2.3 Предельное отклонение мембраны акустического излучателя ![]()
Предельное отклонение описывает максимальный ход катушки без учета искажения выходного сигнала. Значение параметра можно получить из геометрии подвижного узла катушки и подвески, но его необходимо проверить с помощью практических испытаний для гарантии работы громкоговорителя до
без повреждений.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального, стандарта |
IEC 60268-1 | IDT | ГОСТ IEC 60268-1-2014 "Оборудование звуковых систем. Часть 1. Общие положения" |
IEC 60268-5:2003 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующие условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | Clark D., J. Audio Eng. Society, vol.45, p.129-140, March 1997 | Precision Measurement of Loudspeaker Parameters (Точное измерение параметров громкоговорителей) |
[2] | Klippel W., J. Audio Eng. Society vol.51, Heft 5, p.307-323, May 2003 | Assessment of Voice-Coil Peak Displacement |
[3] | Knudsen M.H. and Jensen J.G., J. Audio Eng. Soc., vol.41, p.3-18, Jan./Feb. 1993 | Low-Frequency Loudspeaker Models that include Suspension Creep (Модели низкочастотных громкоговорителей, включающие ползучесть подвески) |
[4] | Klippel W., J. Audio Eng. Society 54, No. 10 pp.907-939 (2006 Oct.) | Tutorial: Loudspeaker Nonlinearities - Causes, Parameters, Symptoms (Учебное пособие - Нелинейности громкоговорителей. Причины, параметры, признаки) |
УДК 621.377:006.354 | ОКС 33.160.50 |
Ключевые слова: ассиметрия жесткости, преобразователь, большой сигнал, громкоговоритель, измерение, индуктивность, смещение, испытания, коэффициент силы, нелинейный коэффициент силы, жесткость, упругая деформация, точка симметрии, сдвиг звуковой катушки | |
Электронный текст документа
и сверен по:
, 2020
