ГОСТ Р ИСО 15765-4-2014
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Транспорт дорожный
Передача диагностических сообщений по локальной сети контроллера (DoCAN)
Часть 4
Требования к системам, связанным с выбросами
Road vehicles. Diagnostic communication over Controller Area Network (DoCAN). Part 4. Requirements for emissions-related systems
OКC 43.040.15*
______________
* По данным официального сайта Росстандарт
ОКС 43.180. - .
Дата введения 2015-06-01
Предисловие
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Московский автомобильно-дорожный государственный технический университет" (МАДИ) на основе собственного аутентичного перевода на русский язык стандарта, указанного в п.4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 14 октября 2014 г. N 1326-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 15765-4:2011* "Транспорт дорожный. Передача диагностических сообщений по локальной сети контроллера (DoCAN). Часть 4. Требования к системам, связанным с выбросами" (ISO 15765-4:2011 "Road vehicles - Diagnostic communication over Controller Area Network (DoCAN) - Part 4: Requirements for emissions-related systems").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (gost.ru)
Введение
Стандарт ИСО 15765-4:2011 был подготовлен техническим комитетом ИСО/ТК 22 "Дорожный транспорт", подкомитет ПК3 "Электрическое и электронное оборудование" (ISO/TC 22, Road vehicles, Subcommittee SC 3, Electrical and electronic equipment).
Настоящая часть стандарта была разработана для того, чтобы определить общие требования к системам диагностики автомобиля, построенным на базе локальной сети контроллеров CAN по международному стандарту ИСО 11898. Несмотря на то, что стандарт предназначен для диагностических систем, он также отвечает требованиям других, построенных на технологии CAN, систем, нуждающихся в протоколе сетевого уровня.
Чтобы добиться этого, стандарт основан на базовой эталонной модели взаимосвязи открытых систем [Open Systems Interconnection (OSI) model]* (ИСО/МЭК 7498-1, ИСО/МЭК 10731), состоящей из 7 уровней, структурная схема которой представлена в таблице 1.
________________
* На территории Российской Федерации используется сокращение ВОС.
Сервисы прикладного уровня, описываемые в стандарте ИСО 14229-3, были определены на основании диагностических сервисов, принятых в стандартах ИСО 14229-1 и ИСО 15031-5, но не ограничиваются использованием только с ними.
Сервисы транспортного и сетевого уровней, описываемые данной частью стандарта, не зависят от реализации физического уровня, в свою очередь физический уровень определяется только стандартами OBD.
Для других областей применения настоящий стандарт может быть использован с любой реализацией физического уровня шины CAN.
Таблица 1 - Спецификации расширенных и стандартизованных диагностических сервисов бортовой диагностики (ОВD), применимых к уровням модели ВОС
Примени- | 7 уровней модели ВОС | Расширенные диагностические сервисы автопроизводителя | Стандартизованные диагностические сервисы бортовой диагностики | Стандартизованные диагностические сервисы всемирно гармонизированной бортовой диагностики | ||
7 уровней модели ВОС (ИСО/МЭК 7498-1 и ИСО/МЭК 10731) | Прикладной (уровень 7) | ИСО 14229-1, ИСО 14229-3 | ИСО 15031-5 | ИСО 27145-3, ИСО 14229-1 | ||
Уровень представления (уровень 6) | Определяется автопроизводителем | ИСО 15031-2, ИСО 15031-5, ИСО 15031-6, SAE J1930-DA, SAE J1979-DA, SAE J2012-DA | ИСО 27145-2, SAE 1930-DA, SAE J1979-DA, SAE J2012-DA; SAE J1939:2011, приложение С (SPN); SAE J1939-73:2010, приложение A (FMI) | |||
Сеансовый (уровень 5) | ИСО 14229-2 | |||||
Транспортный (уровень 4) | ИСО 15765-2 | ИСО 15765-2 | ИСО 15765-4 | ИСО 15765-4, ИСО 15765-2 | ИСО 27145-4 | |
Сетевой (уровень 3) | ||||||
Канальный (уровень 2) | ИСО 11898-1, ИСО 11898-2, ИСО 11898-3, ИСО 11898-5, или определяемый пользователем | ИСО 11898-1, ИСО 11898-2 | ИСО 15765-4, ИСО 11898-1, ИСО 11898-2 | |||
Физический (уровень 1) | ||||||
1 Область применения
Настоящая часть стандарта устанавливает требования к шинам передачи данных CAN, в которых один или более контроллеров совместимы с бортовой диагностикой OBD или WWH-OBD. Рассматриваемая сеть предполагает использование внешнего диагностического оборудования для проведения поиска неисправностей и соответствующего ремонта. Требования к шинам передачи данных CAN транспортного средства и внешнего диагностического оборудования основываются на международных стандартах ИСО 15765-2, ИСО 11898-1 и ИСО 11898-2.
Настоящий стандарт имеет приоритет перед другими международными стандартами похожей направленности. Стандарт не описывает архитектуру бортовой сети транспортного средства, но стремится обеспечить ее совместимость с внешним диагностическим оборудованием.
Настоящий стандарт определяет требования для успешного установления, поддержания и завершения связи с бортовой сетью транспортного средства, отвечающего нормам OBD/WWH-OBD.
Для обеспечения взаимодействия внешнего диагностического оборудования и бортовой сети транспортного средства реализован принцип "быстрого подключения" (plug-and-play). В данной части стандарта рассматриваются все уровни эталонной модели взаимодействия открытых систем (ВОС).
Настоящая часть стандарта является основной для понимания диагностической связи по локальной сети контроллеров (DoCAN). По результатам инициализации внешнее диагностическое оборудование определяет, какой протокол и какие диагностические сервисы поддерживаются контроллерами систем, обеспечивающих экологичность работы автотранспортного средства:
- OBD: ИСО 15031 (все части);
- WWH-OBD: ИСО 27145 (все части).
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*:
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ИСО 11898-1 Транспорт дорожный. Местная контроллерная сеть (CAN). Часть 1. Канальный уровень и передача сигналов (ISO 11898-1, Road vehicles - Controller area network (CAN) - Part 1: Data link layer and physical signaling)
ИСО 11898-2 Транспорт дорожный. Местная контроллерная сеть (CAN). Часть 2. Устройство доступа к высокоскоростной среде (ISO 11898-2, Road vehicles - Controller area network (CAN) - Part 2: High-speed medium access unit)
ИСО 15031-3 Транспорт дорожный. Связь между автомобилями и наружным оборудованием для диагностики выбросов автомобиля в окружающий воздух. Часть 3. Диагностический соединитель и связанные с ним электрические сети, требования и применение (ISO 15031-3, Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part 3: Diagnostic connector and related electrical circuits, specification and use)
ИСО 15031-5 Транспорт дорожный. Связь между автомобилями и наружным оборудованием для диагностики выбросов автомобиля в окружающий воздух. Часть 5. Службы диагностики выбросов (ISO 15031-5, Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part 5: Emissions-related diagnostic services)
ИСО 15765-2 Транспорт дорожный. Передача диагностических сообщений по локальной сети контроллера. Часть 2. Транспортный протокол и услуги сетевого уровня (ISO 15765-2, Road vehicles - Diagnostic communication over Controller Area Networks (DoCAN) - Part 2: Transport protocol and network layer services)
ИСО 27145-3 Дорожный транспорт. Соблюдение требований к связи WWH-OBD. Часть 3. Словарь общих сообщений (ISO 27145-3, Road vehicles - Implementation of World-Wide Harmonized On-Board Diagnostics (WWH-OBD) communication requirements - Part 3: Common message dictionary)
ИСО 27145-4 Дорожный транспорт. Требования к передаче диагностических сообщений по локальной сети контроллера. Часть 4. Связь между транспортом и испытательным оборудованием (ISO 27145-4, Road vehicles - Implementation of World-Wide Harmonized On-Board Diagnostics (WWH-OBD) communication requirements - Part 4: Connection between vehicle and test equipment)
3 Термины, определения, обозначения и сокращения
3.1 Термины и определения
В настоящем стандарте применены термины и определения по ИСО 15765-2.
3.2 Обозначения
Обозначение | Расшифровка | Единица измерения |
| Электрическая емкость оконечной нагрузки (capacitance of а.с. termination) | Ф |
| Электрическая емкость между CAN_H и нулевым потенциалом | Ф |
| Электрическая емкость между CAN_L и нулевым потенциалом | Ф |
| Электрическая емкость между CAN_H и CAN_L | Ф |
допустимое отклонение осциллятора (oscillator tolerance) | Гц | |
| Максимальная длина кабеля между разъемом OBD/WWH-OBD и внешним диагностическим оборудованием | м |
| Сегмент распространения (propagation segment) | - |
| Фазовый сегмент 1 (phase segment 1) | - |
| Фазовый сегмент 2 (phase segment 2) | - |
| оконечное сопротивление (resistance of а.с. termination) | Ом |
| Сегмент синхронизации (synchronization segment) | - |
Время прохождения бита (bit time) | мкс | |
| Время приема бита (receive bit time) | мкс |
| Время передачи бита (transmit bit time) | мкс |
| Задержка прохождения сигнала по соединительному кабелю внешнего диагностического оборудования (без задержки интерфейса CAN внешнего диагностического оборудования) | мкс |
Временной сегмент 1 (timing segment 1) | мкс | |
Временной сегмент 2 (timing segment 2) | мкс | |
Интервал повторной синхронизации (resynchronization jump with) | мкс | |
| Сегмент синхронизации (synchronization segment) | мкс |
| Задержки интерфейса CAN внешнего диагностического оборудования (без задержки прохождения сигнала по соединительному кабелю) | мкс |
Квант времени (time quantum) | мкс |
3.3 Сокращения
BS - размер пакета данных (block size);
CAN - локальная сеть контроллеров (шина передачи данных CAN);
CF - последовательный кадр данных (consecutive frame);
DLC - код длины данных (data length code);
DoCAN - диагностическая связь по локальной сети контроллеров;
ECU* - электронный блок управления;
________________
* На территории Российской Федерации используется сокращение ЭБУ.
ЕСМ - электронный блок управления двигателем;
FC - управление потоком данных (flow control);
FF - первый кадр данных (first frame);
FS - статус передачи данных (flow status);
OBD - бортовая диагностика (on-board diagnostics);
SA - адрес источника (source address);
SF - единичный кадр данных (single frame);
SJW - время синхронизации (synchronization jump width);
SP - номинальная контрольная точка (nominal sample point);
ТА - адрес назначения (target address);
TCM - электронный блок управления коробкой переключения передач (transmission control module);
WWH-OBD - всемирно гармонизированная бортовая диагностика (world-wide harmonized on-board diagnostics).
4 Международные соглашения
Настоящий стандарт, применительно к вопросам диагностических сервисов модели ВОС, основывается на Международном Соглашении ИСО/МЭК 10731:1994.
5 Описание стандарта
На рисунке 1 показаны наиболее применимые реализации приложений с использованием протокола диагностической связи по локальной сети контроллеров DoCAN.
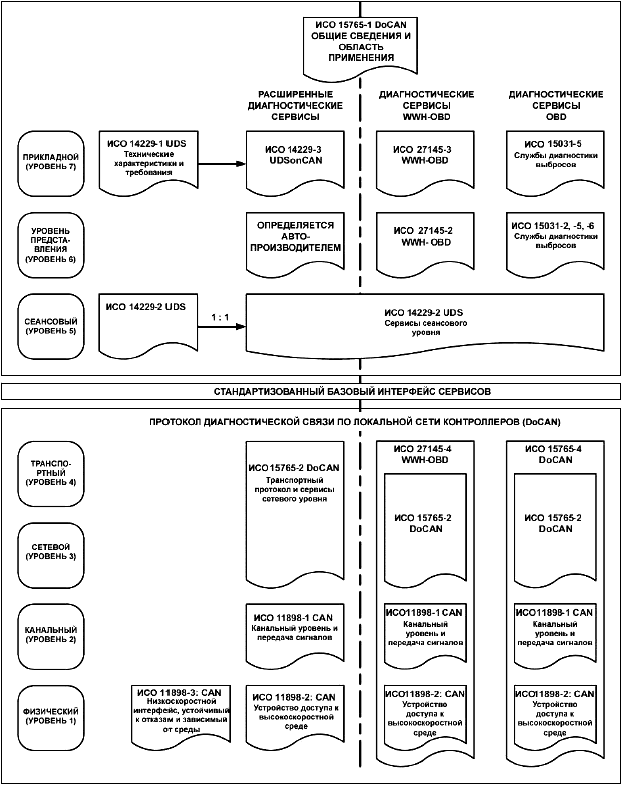
Рисунок 1 - Представление диагностической связи по локальной сети контроллеров на основании модели ВОС
6 Последовательность инициализации внешнего диагностического оборудования
6.1 Общие вопросы
Внешним диагностическим оборудованием должна поддерживаться последовательность инициализации, указанная в данной части стандарта (см. рисунок 2).
Целью процесса инициализации внешнего диагностического оборудования является автоматическое определение поддерживаемых транспортным средством стандартов OBD или WWH-OBD. При этом используется физический уровень шины передачи данных CAN, описанный в пункте 12.
Кроме того, на основе анализа ответов транспортного средства при выполнении инициализации определяется статус соответствия связи:
- ИСО 15031-5 с запросами сервисов 0x01 0x00 (с поддержкой идентификатора параметра PID), или
- ИСО 27145-3 с запросом сервисов 0x22 0xF810 (протокол идентификации DID) с положительным ответом.
Только ECU транспортных средств, поддерживающих режим WWH-OBD, будут отвечать на функциональный сервисный запрос 0x22 DID 0xF810 идентификации протокола. Транспортные средства, которые отвечают только на функциональный сервисный запрос 0x01 PID 0x00, поддерживают более ранние методы связи OBD. Транспортные средства, которые не отвечают ни на один из запросов, не поддерживают бортовую диагностику OBD, регулируемую данной частью стандарта. Данный процесс более подробно описан в 6.3.
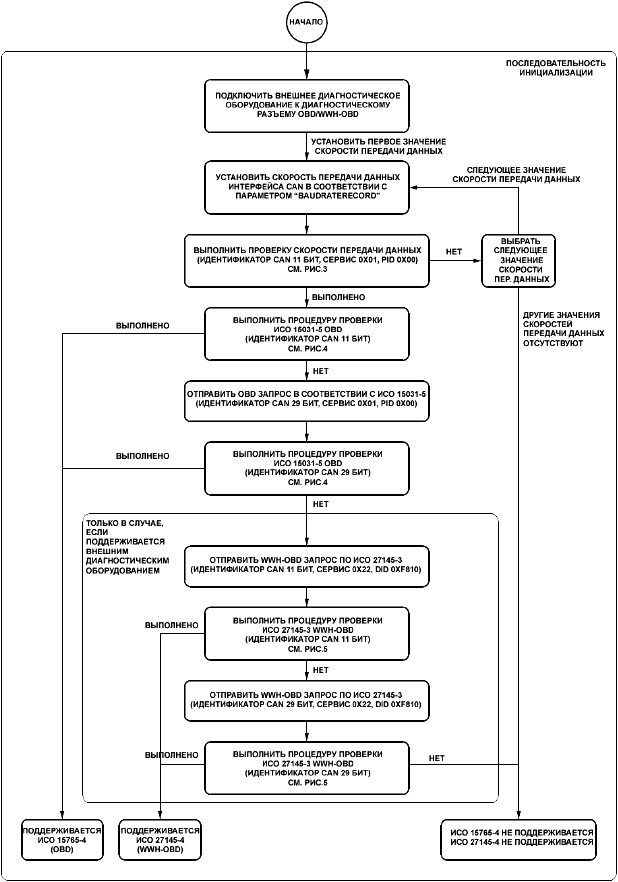
Рисунок 2 - Описание последовательности инициализации внешнего диагностического оборудования
Для каждого OBD/WWH-OBD сервиса, требующего определение "поддерживаемой" информации, внешнее диагностическое оборудование должно обновлять свои списки ожидаемых от ECU ответов на посылаемые запросы. Для получения информации о применяемых сервисах можно обратиться к стандартам ИСО 15031-5 (для OBD) или ИСО 27145-3 (для WWH-OBD).
Последовательность инициализации внешнего диагностического оборудования может поддерживать инициализацию на одной скорости передачи данных (например, 500 кбит/с) или на нескольких скоростях (например, 250 кбит/с и 500 кбит/с), а также разделяется на следующие этапы:
a) проверка поддержки длины заголовков CAN сообщений в 11 бит;
b) проверка поддержки длины заголовков CAN сообщений в 29 бит.
Для более подробной информации - см. 6.2.2.
Последовательность инициализации внешнего диагностического оборудования содержит алгоритм для предотвращения работы с ранее выпущенными транспортными средствами, у которых на контактах CAN диагностического разъема (ИСО 15031-3) может использоваться другой, отличный от OBD/WWH-OBD физический уровень шины CAN или отличный от CAN протокол.
6.2 и 6.3 описывают процесс инициализации внешнего диагностического оборудования для определения поддерживаемой скорости передачи данных, идентификаторов сообщений CAN (11 бит или 29 бит) и соответственно стандартов диагностики OBD (ИСО 15031) или WWH-OBD (ИСО 27145).
6.2 Процедура определения скорости передачи данных
6.2.1 Параметр скорости передачи данных
По умолчанию, параметр "baudrateRecord" (параметр скорости передачи данных) содержит все скорости передачи данных, указанные в пункте 12.3. Содержание параметра "baudrateRecord" может быть заменено любым другим списком скоростей передачи данных (например, 500 Кбит/с, как указано в пункте 12.3.3).
Параметр скорости передачи данных должен использоваться для определения типа выполняемой инициализации. Если параметр "baudrateRecord" содержит одну скорость передачи данных, значит должна выполняться инициализация на указанной скорости (например, 500 кбит/с). Если параметр "baudrateRecord" содержит несколько значений скоростей передачи данных, значит должна выполняться инициализация, включающая определение скорости передачи данных (см. рисунок 4).
Рисунок 3 показывает использование нескольких скоростей передачи данных (например, 250 кбит/с и 500 кбит/с). Для скоростей передачи данных, определенных стандартами OBD/WWH-OBD, внешнее диагностическое оборудование должно использовать параметры тактовой синхронизации, указанные в пункте 12.3.
6.2.2 Проверка скорости передачи данных
Если в параметре "baudrateRecord" указано несколько скоростей, то для определения скорости осуществления коммуникаций с транспортным средством необходимо выполнить процедуру, показанную на рисунке 3.
Внешнее диагностическое оборудование должно настроить свой интерфейс CAN с помощью первого значения скорости передачи данных параметра "baudrateRecord". И далее должно использовать параметры тактовой синхронизации, соответствующие выбранной скорости передачи данных (см. 12.3).
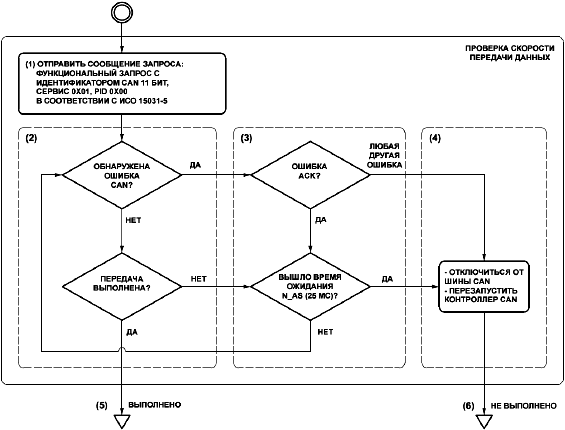
Шаг (1) - После выполнения настройки интерфейса CAN, внешнее диагностическое оборудование должно подключиться к шине CAN и незамедлительно отправить функционально адресованное сообщение запроса с сервисом 0x01 (считывание поддерживаемых PID) и использованием 11-битного идентификатора CAN функционального запроса OBD/WWH-OBD, как это определено в 10.5.2.
Примечание - Незамедлительная передача необходима для того, чтобы активировать мониторинг ошибок CAN (описывается далее), т.к. инициализация контроллера CAN на неправильной скорости передачи без отправки каких-либо данных может оставить контроллер CAN в состоянии генерации кадров ошибок на шине CAN.
Шаг (2) - Внешнее диагностическое оборудование должно проверять наличие ошибок CAN. Если сообщение запроса успешно передано в шину CAN, то внешнее диагностическое оборудование должно отметить факт успешной передачи и приступить к проверке идентификаторов сообщений CAN, как указано в п.6.3.
Шаг (3) - Если обнаружена ошибка проверки подтверждения (АСK), то внешнее диагностическое оборудование должно продолжить попытки отправки сообщения запроса, пока не истечет время ожидания (N_As) в 25 мс.
Шаг (4) - Если возникают любые другие ошибки, или ошибка проверки подтверждения продолжает появляться после 25 мс (N_As) ожидания, то внешнее диагностическое оборудование должно отключить свой интерфейс CAN от шины передачи данных CAN.
Шаг (5) - Продолжение на рисунке 4.
Шаг (6) - Внешнее диагностическое оборудование должно проверить следующие значения скорости передачи данных, содержащиеся в параметре "baudrateRecord". Если проверены еще не все значения параметра "baudrateRecord", то внешнее диагностическое оборудование должно настроить свой интерфейс CAN с помощью следующего значения скорости передачи данных "baudrateRecord" и запустить заново процедуру проверки с шага (1) на рисунке 3. Если были безуспешно проверены все значения параметра "baudrateRecord", то предполагается, что запрос не был отправлен. Это означает, что транспортное средство не соответствует требованиям ни ИСО 15765, ни ИСО 27145-4.
Рисунок 3 - Проверка скорости передачи данных
6.2.3 Обнаружение ошибок при работе внешнего диагностического оборудования
В случае, если транспортное средство использует физический уровень CAN, отличный от регламентируемого стандартами OBD/WWH-OBD (см. раздел 12) или не-CAN протокол на контактах CAN диагностического разъема OBD/WWH-OBD, внешнее диагностическое оборудование должно распознать, что транспортное средство не поддерживает CAN и OBD/WWH-OBD, и немедленно остановить процесс передачи запросов.
Если транспортное средство использует CAN с физическим уровнем, соответствующим разделу 12, процедура передачи данных, описанная далее, будет гарантировать, что внешнее диагностическое оборудование немедленно остановит сеанс связи при обнаружении неправильно используемой скорости передачи данных. При нормальных условиях (т.е. при отсутствии ошибок на шине CAN с отключенным внешним диагностическим оборудованием) внешнее диагностическое оборудованием отключит свой интерфейс CAN в случае, когда внутренние счетчики ошибок, совместимых с OBD/WWH-OBD электронных блоков управления, достигнут критических значений.
Чтобы добиться этого, внешнее диагностическое оборудование должно иметь возможность:
- немедленно прекратить отправку при передаче любого пакета данных:
- интерфейс CAN должен быть отключен в течение 12 мкс после получения сигнала ошибки на шине. Максимальное допустимое время для отключения составляет 100 мкс;
- с отключенным интерфейсом CAN внешнее диагностическое оборудование не должно иметь возможности передачи доминантных битов в шину CAN;
- немедленно обнаружить любые ошибки на шине CAN.
Второе положение предполагает, что внешнее диагностическое оборудование не может полагаться только на процесс стандартной обработки ошибок шины контроллером CAN, т.к. он, скорее всего, выдаст флаг ошибки уже после того, как будет достигнут статус неисправности шины (для дополнительной информации см. ИСО 11898-1).
6.3 Процедура проверки заголовков сообщений CAN
6.3.1 Процедура проверки заголовков сообщений CAN OBD
Должна использоваться процедура получения на запрос от внешнего диагностического оборудования ответного сообщения от, совместимого с OBD ECU с идентификатором длиной в 11 бит или фиксация того, что ответное сообщение не было получено. Если были обнаружены совместимые с OBD ECU, то рассматриваемая процедура также должна определить перечень доступных ECU на данном транспортном средстве.
Процедура проверки заголовков сообщений должна проводиться так, как показано на рисунке 4, после того, как процедура запроса 11-битного идентификатора сообщений CAN (см. 6.2.2 и рисунок 3) успешно закончилась ("Выполнено").

Шаг (1) - Если передача предыдущего сообщения запроса была выполнена успешно ("Выполнено"), то внешне диагностическое оборудование должно запустить таймер ![]() (см. ИСО 15031-5) и слушать идентификаторы CAN физических ответ в соответствии с 10.5.
(см. ИСО 15031-5) и слушать идентификаторы CAN физических ответ в соответствии с 10.5.
Рисунок 4, лист 1 - Выполнение процедуры проверки ИСО 15031-5 OBD
Шаг (2) - Если внешнее диагностическое оборудование определило, что время ожидания ![]() вышло и прием ответных сообщений не начался, значит для OBD связи в данном случае не используются 11-битные или 29-битные (в зависимости от того, какие были отправлены в предыдущем сообщении запроса) идентификаторы сообщений CAN. Кроме того, это означает, что внешнее диагностическое оборудование определило, что транспортное средство поддерживает CAN с соответствующим физическим уровнем и текущей скоростью передачи данных, содержащейся в параметре "baudrateRecord".
вышло и прием ответных сообщений не начался, значит для OBD связи в данном случае не используются 11-битные или 29-битные (в зависимости от того, какие были отправлены в предыдущем сообщении запроса) идентификаторы сообщений CAN. Кроме того, это означает, что внешнее диагностическое оборудование определило, что транспортное средство поддерживает CAN с соответствующим физическим уровнем и текущей скоростью передачи данных, содержащейся в параметре "baudrateRecord".
Шаг (3) - Началом ответного сообщения может быть либо прием первого кадра данных "FirstFrame", либо единичного кадра данных "Singleframe", которые используют 11-битные или 29-битные идентификаторы сообщений CAN OBD (в зависимости от того, какие были использованы в предыдущем сообщении запроса). Если начало приниматься хотя бы одно ответное сообщение, то внешнее диагностическое оборудование должно продолжить получать это сообщение (относится только к многокадровым ответным сообщениям) и должно принимать последующие ответные сообщения с 11-битными или 29-битными идентификаторами CAN физических ответов (в зависимости оттого, какие были отправлены в предыдущем сообщении запроса).
Шаг (4) - Когда все ответные сообщения полностью получены (положительные и отрицательные ответы) и вышло время ожидания таймера ![]() , внешнее диагностическое оборудование должно проанализировать, были ли получены отрицательные ответы.
, внешнее диагностическое оборудование должно проанализировать, были ли получены отрицательные ответы.
Если одно или более из принятых ответных сообщений являются отрицательными ответами с кодом ответа 0x21 ("busyRepeatRequest") на ранее переданный запрос, то внешнее диагностическое оборудование должно повторно запустить процедуру проверки ответных сообщений с шага (1) после минимальной временной задержки в 200 мс. Если отрицательный ответ(ы) появляе(ю)тся в последующих шести циклах, то внешнее диагностическое оборудование будет считать, что транспортное средство не совместимо с ИСО 15031-5. Это означает, что совместимая с OBD система должна обеспечить отправку положительного ответа в течение максимум пяти попыток.
Рисунок 4, лист 2*
________________
* Рисунок соответствует оригиналу, здесь и далее по тексту. - .
Предполагая, что каждый отрицательный ответ с кодом NRC 0x21 должен быть получен незадолго до истечения таймера Р2, получаем, что общее доступное время для предоставления корректного ответа транспортным средством составляет 1250 мс.
Если совместимый с OBD ECU реагирует любым другим негативными кодом ответа или отправляет ответ, который не может быть интерпретирован в соответствии с ISO 15031-5, то внешнее диагностическое оборудование будет считать, что транспортное средство не совместимо с ИСО 15031-5 ("Не выполнено").
Шаг (5) - Если никаких отрицательных или ошибочных ответов не было зафиксировано на шаге (4), то внешнее диагностическое оборудование подтверждает, что автомобиль поддерживает 11-битные или 29-битные идентификаторы сообщений CAN (в зависимости от того, какие были использованы в предыдущем сообщении запроса) для связи OBD. Внешнее диагностическое оборудование должно сформировать на основании полученных физических ответов список обнаруженных, совместимых с OBD, которые ответили на сообщение запроса сервиса 0x01 и считывания поддерживаемых РID. Этот шаг завершает процедуру инициализации и подтверждает соответствие транспортного средства настоящей части стандарта.
Шаг (6) - Если поддержка 11-битных идентификаторов CAN для связи OBD не может быть подтверждена, то должно быть отправлено функционально адресованное сообщение запроса сервиса 0x01 (считывание поддерживаемых PID) с использованием 29-битного идентификатора CAN функционального запроса OBD, как описано в п.10.5.3, и повторно выполнена процедура проверки ответов, как показано на рисунке 4. Если поддержка 11-битных и 29-битных идентификаторов CAN для связи OBD не может быть установлена, то необходимо выполнить поиск совместимых с WWH-OBD ECU, как показано на рисунке 5.
Шаг (7) - Транспортное средство соответствует данной части стандарта.
Рисунок 4, лист 3
6.3.2 Процедура проверки заголовков сообщений CAN WWH-OBD
Необходимо передать функционально адресованный сервисный запрос 0x22 0xF810 (идентификация протокола) с использованием 11-битного идентификатора сообщения запроса CAN (WWH-OBD), как указано в 10.5.2, и провести процедуру проверки ответного сообщения так, как показано на рисунке 5.
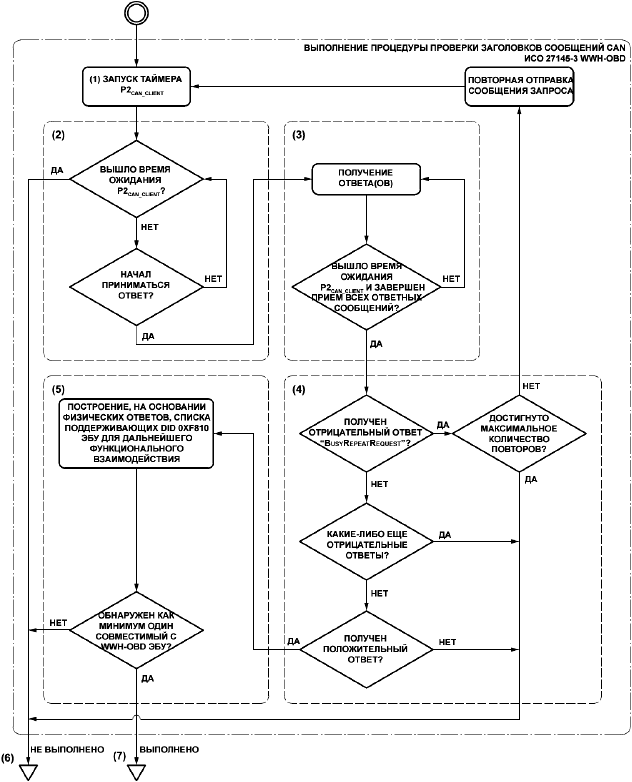
Рисунок 5, лист 1 - Выполнение процедуры проверки ИСО 27145-3 WWH-OBD
Шаг (1) - Если передача предыдущего сообщения запроса WWH-OBD была выполнена успешно (как показано на рисунке 2), то внешне диагностическое оборудование должно запустить таймер ![]() (см. ISO 27145-3) и слушать идентификаторы CAN физических ответ в соответствии с 10.5.
(см. ISO 27145-3) и слушать идентификаторы CAN физических ответ в соответствии с 10.5.
Шаг (2) - Если внешнее диагностическое оборудование определило, что время ожидания ![]() вышло и прием ответных сообщений не начался, значит для WWH-OBD связи в данном случае не используются 11-битные или 29-битные (в зависимости от того, какие были отправлены в предыдущем сообщении запроса) идентификаторы сообщений CAN.
вышло и прием ответных сообщений не начался, значит для WWH-OBD связи в данном случае не используются 11-битные или 29-битные (в зависимости от того, какие были отправлены в предыдущем сообщении запроса) идентификаторы сообщений CAN.
Шаг (3) - Началом ответного сообщения может быть либо прием первого кадра данных "FirstFrame", либо единичного кадра данных "Singleframe", которые используют 11-битные или 29-битные идентификаторы сообщений CAN WWH-OBD (в зависимости от того, какие были использованы в предыдущем сообщении запроса). Если начало приниматься хотя бы одно ответное сообщение, то внешнее диагностическое оборудование должно продолжить получать это сообщение (относится только к многокадровым ответным сообщениям) и должно принимать последующие ответные сообщения с 11-битными или 29-битными идентификаторами CAN физических ответов (в зависимости от того, какие были отправлены в предыдущем сообщении запроса).
Шаг (4) Когда все ответные сообщения полностью получены (положительные и отрицательные ответы) и вышло время ожидания таймера ![]() , внешнее диагностическое оборудование должно проанализировать, были ли получены отрицательные ответы. Если одно или более из принятых ответных сообщений являются отрицательными ответами с кодом ответа 0x21 ("busyRepeatRequest") на ранее переданный запрос, то внешнее диагностическое оборудование должно повторно запустить процедуру проверки ответных сообщений с шага (1) после минимальной временной задержки в 200 мс. Если отрицательный ответ(ы) появляе(ю)тся в последующих шести циклах, то внешнее диагностическое оборудование будет считать, что транспортное средство не совместимо с ИСО 27145-3. Это означает, что совместимая с WWH-OBD система должна обеспечить отправку положительного ответа в течение максимум пяти попыток.
, внешнее диагностическое оборудование должно проанализировать, были ли получены отрицательные ответы. Если одно или более из принятых ответных сообщений являются отрицательными ответами с кодом ответа 0x21 ("busyRepeatRequest") на ранее переданный запрос, то внешнее диагностическое оборудование должно повторно запустить процедуру проверки ответных сообщений с шага (1) после минимальной временной задержки в 200 мс. Если отрицательный ответ(ы) появляе(ю)тся в последующих шести циклах, то внешнее диагностическое оборудование будет считать, что транспортное средство не совместимо с ИСО 27145-3. Это означает, что совместимая с WWH-OBD система должна обеспечить отправку положительного ответа в течение максимум пяти попыток.
Рисунок 5, лист 2
Предполагая, что каждый отрицательный ответ с кодом NRC 0x21 должен быть получен незадолго до истечения таймера Р2, получаем, что общее доступное время для предоставления корректного ответа транспортным средством составляет 1250 мс.
Если совместимый с WWH-OBD ЭБУ реагирует любым другим негативными кодом ответа или отправляет ответ, который не может быть интерпретирован в соответствии с ИСО 27145-3, то внешнее диагностическое оборудование будет считать, что транспортное средство не совместимо с ИСО 27145-3.
Шаг (5) - Если никаких отрицательных или ошибочных ответов не было зафиксировано на шаге (4), то внешнее диагностическое оборудование подтверждает, что автомобиль поддерживает 11-битные или 29-битные идентификаторы сообщений CAN (в зависимости от того, какие были использованы в предыдущем сообщении запроса) для связи WWH-OBD. Внешнее диагностическое оборудование должно сформировать на основании полученных физических ответов список обнаруженных ЭБУ, совместимых с WWH-OBD, которые ответили на сообщение запроса сервиса 0x22 0xF810, и далее были считаны поддерживаемые DID.
Если сформированный список содержит как минимум один, совместимый с WWH-OBD ECU, то процедура инициализации завершается и подтверждается, что транспортное средство соответствует ИСО 27145-4.
Если данный список не содержит ни одного, совместимого с WWH-OBD ECU, то считается, что транспортное средство не поддерживает идентификаторы CAN, используемые в предыдущем отправленном запросе.
Шаг (6) - Если поддержка 11-битных идентификаторов CAN для связи WWH-OBD не может быть подтверждена ("Не выполнено"), то должно быть отправлено функционально адресованное сообщение запроса сервиса 0x22 (считывание поддерживаемых PID) с использованием 29-битного идентификатора CAN функционального запроса WWH-OBD, как описано в 10.5.3. После успешной отправки запроса внешнее диагностическое оборудование должно повторно выполнить процедуру проверки ответов, как показано на рисунке 5. Если поддержка 11-битных и 29-битных идентификаторов CAN для связи WWH-OBD не может быть установлена, то считается, что транспортное средство не совместимо с ISO 27145 ("Не выполнено").
Шаг (7) - Транспортное средство соответствует ИСО 27145-4.
Рисунок 5, лист 3
7 Прикладной уровень
Прикладной уровень является седьмым из семи уровней модели ВОС. Он взаимодействует и предоставляет сервисы непосредственно приложению, а также отправляет запросы уровню представления.
Прикладной уровень для диагностических сервисов, относящихся к контролю систем выхлопа, должен быть реализован в соответствии с:
- ИСО 15031-5 (для OBD);
- ИСО 27145-3 (для WWH-OBD).
В свою очередь, автомобили, совместимые с:
- OBD, должны отвечать на запросы внешнего диагностического оборудования в соответствии со стандартом ИСО 15031-5;
- WWH-OBD, должны отвечать на запросы внешнего диагностического оборудования в соответствии со стандартом ИСО 27145-3.
Внешнее диагностическое оборудование должно быть способно поддерживать список обнаруженных ЭБУ OBD/WWH-OBD (генерируется во время инициализации, описанной в пункте 6).
8 Сеансовый уровень
Стандарт ИСО 14229-2 определяет требования к службам сеансового уровня.
Все коммуникации OBD/WWH-OBD должны происходить во время используемой по умолчанию диагностической сессии.
В относящихся к OBD ECU всегда должна быть запущена только одна активная диагностическая сессия. Относящийся к OBD/WWH-OBD ECU при включении питания должен всегда запускать используемую по умолчанию диагностическую сессию. Если не будет запущенно никакой другой диагностической сессии, то используемая по умолчанию будет работать, пока на ECU OBD/WWH-OBD подается питание.
ECU OBD/WWH-OBD должен быть способен обеспечивать все диагностические функции, определенные в системе OBD/WWH-OBD для используемой по умолчанию диагностической сессии при нормальных условиях использования.
Для поддержания, используемой по умолчанию, диагностической сессии активной, нет необходимости в отправке каких-либо запросов в ECU OBD/WWH-OBD.
9 Протокол транспортного уровня
Требования стандарта ИСО 15765-2 применимы для целей OBD и WWH-OBD.
10 Сетевой уровень
10.1 Общие вопросы
Сетевой уровень внешнего диагностического оборудования и совместимых с OBD/WWH-OBD ECU автотранспортных средств должен быть организован в соответствии с ИСО 15765-2 и ограничениями/дополнениями, изложенными в 10.2 и 10.5.
10.2 Параметры сетевого уровня
10.2.1 Значения временных параметров
В таблице 2 указываются временные параметры сетевого уровня, необходимые для обеспечения OBD/WWH-OBD связи внешнего диагностического оборудования и, совместимых с OBD, автотранспортных средств.
Указанные требуемые значения являются обязательными для обеспечения связи внешнего диагностического оборудования и ЭБУ, совместимых с OBD/WWH-OBD. Значения времени ожидания установлены больше, чем значения, требуемые для функционирования, и сделано это для того, чтобы преодолеть условия, когда требуемые значения в принципе не могут быть достигнуты (например, по причине внешних условий, таких как высокая нагрузка на шину передачи данных).
Таблица 2 - Значения времени ожидания и требуемых временных параметров сетевого уровня
Параметр | Время ожидания | Требуемое значение |
N_As / N_Ar | 25 мс | - |
N_Bs | 75 мс | - |
N_Br | - | (N_Br+N_Ar)<25 мс |
N_Cs | - | (N_Cs+N_As)<50 мс |
N_Cr | 150 мс | - |
Примечание - Подробное описание значений временных параметров сетевого уровня можно найти в стандарте ИСО 15765-2. В соответствии с требованиями временных параметров прикладного уровня, для передачи единичного кадра или первого кадра данных ответного сообщения ECU применяется следующее функциональное требование: | ||
10.2.2 Определение значений параметров управления потоком данных
10.2.2.1 Параметры управления потоком данных
Значения параметров BlockSize () ("размер блока данных") и SeparationTime (
) ("разделительное время") ограничены для внешнего диагностического оборудования и сервера/ECU. Несмотря на ограничение этих значений, оба параметра должны быть способны адаптироваться к любому допустимому параметру кадра данных FlowControl ("управление потоком данных").
Это означает, что внешнее диагностическое оборудование будет использовать эти значения параметров при передаче кадров данных FlowControl, но при этом все равно будет поддерживать транспортный протокол, описанный в стандарте ИСО 15765-2.
10.2.2.2 Внешнее диагностическое оборудование
Внешнее диагностическое оборудование будет использовать следующие значения параметров сетевого уровня, показанные в таблице 3, для отправки своих кадров данных FlowControl в ответ на прием первого кадра данных FirstFrame.
Таблица 3 - Значения параметров управления потоком данных внешнего диагностического оборудования
Параметр | Наименование | Значение | Описание |
| WaitFrame Transmission | 0 | В диагностике OBD/WWH-OBD не используются кадры ожидания FlowControl. Кадр данных FlowControl, отправленный внешним диагностическим оборудованием вслед за первым кадром ответного сообщения ECU, должен содержать параметр FlowStatus ( |
BlockSize | 0 | Единичный кадр данных FlowControl должен передаваться внешним диагностическим оборудованием на протяжении передачи сегментированного сообщения. Этот уникальный кадр данных FlowControl должен следовать за первым кадром ответного сообщения ECU. | |
SeparationTime | 0 | Это значение позволяет ECU, как можно быстрее, отправлять после кадра данных FlowControl, отправленного внешним диагностическим оборудованием, последовательные кадры данных ConsecutiveFrames. | |
Примечаниe - Если в сетевом уровне ECU OBD/WWH-OBD организовано ограниченное применение стандарта ИСО 15765-2 в части использования только указанных выше параметров FlowControl управления потоком данных ( | |||
10.2.2.3 Совместимый c WWH-OBD сервер/ECU
Для кадров данных FlowControl, отправляемых в ответ на прием первого кадра FirstFrame, совместимый с WWH-OBD сервер/ECU должен использовать значения параметров сетевого уровня, представленные в таблице 4.
Таблица 4 - Значения параметров управления потоком данных, совместимого с WWH-OBD, сервера/ECU
Параметр | Наименование | Значение | Описание |
BlockSize | От 0x00 до 0xFF | Сервер/ECU должны выбрать лучшее значение для соответствия сети транспортного средства и особенностям ограничений шлюза. Рекомендуется использовать значение "ноль" для организации максимально быстрой передачи данных. | |
SeparationTime | От 0 до 5 | Это значение позволяет внешнему диагностическому оборудованию посылать последовательные кадры данных ConsecutiveFrames, вслед за кадром FlowControl, отправленным сервером/ЭБУ, настолько быстро, насколько позволяет, совместимая с WWH-OBD, сеть транспортного средства. Принимающий сервер/ECU передает значение параметра Необходимо убедиться, что сети и шлюзы транспортного средства могут работать с максимальным временем межкадрового разделения в 5 мс для обеспечения продолжительной передачи данных серверу/ЕСU. |
10.2.3 Максимальное количество совместимых с OBD/WWH-OBD ECU
Максимальное количество совместимых с OBD/WWH-OBD ЭБУ в сети транспортного средства не должно превышать восьми. Сетевой уровень внешнего диагностического оборудования должен быть способен принимать сегментированные данные параллельно от восьми совместимых с OBD/WWH-OBD ECU.
10.3 Форматы адресации
10.3.1 Нормальный и фиксированный форматы адресации
Для связи OBD/WWH-OBD применяются:
- только нормальный формат адресации (как определено в стандарте ИСО 15765-2) - в случае использования 11-битных идентификаторов (заголовков сообщений CAN), или
- только нормальный фиксированный формат адресации (как определено в стандарте ИСО 15765-2) - в случае использования 29-битных идентификаторов (заголовков сообщений CAN).
10.3.2 Функциональный способ адресации
Функционально адресованные сервисы требуют, чтобы содержание данных не превышало ограничений, справедливых для единичного кадра данных, определенных в стандарте ИСО 15765-2.
На рисунке 6 показано использование идентификатора CAN функционального запроса и соответствующий ответ.
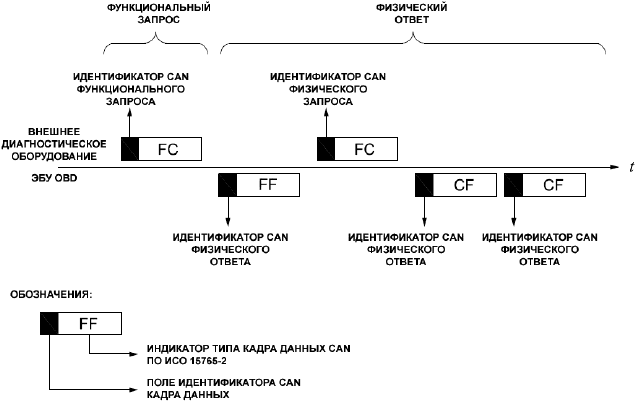
Рисунок 6 - Использование идентификатора CAN функционального запроса
10.3.3 Физический способ адресации
Каждый сервер/ECU, совместимый с системой диагностики WWH-OBD, должен быть способен принимать физически адресованные сообщения на сетевом уровне с длиной вплоть до максимальной, установленной в стандарте ИСО 27145-3. Это требование не относится к сообщениям запроса, описанным в стандарте ИСО 15031-5.
Внешнее диагностическое оборудование должно быть способно передавать физически адресованные сообщения запроса на сетевом уровне WWH-OBD вплоть до максимально поддерживаемой длины сообщений в соответствии с ИСО 27145-3.
Примечание - Это означает, что все сервисы, показанные на рисунке 7, могут быть переданы как физические запросы.
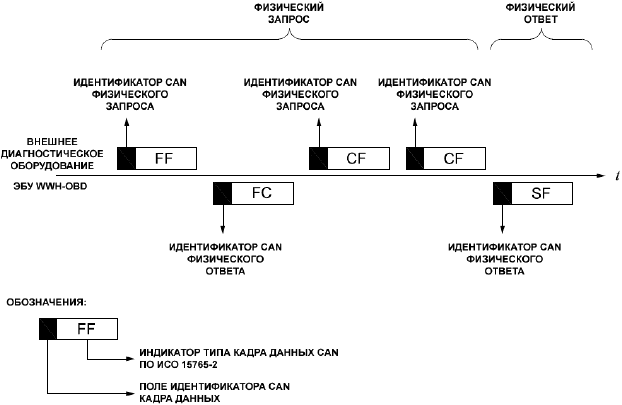
Рисунок 7 - Использование идентификатора CAN физического запроса
10.4 Требования к заголовкам сообщений CAN
10.4.1 Внешнее диагностическое оборудование
Внешнее диагностическое оборудование должно поддерживать 11-битные и 29-битные идентификаторы (заголовки) сообщений CAN для связи OBD/WWH-OBD, в рамках которой должны приниматься только идентификаторы CAN, попадающие в диапазон 11 или 29 бит (10.5).
10.4.2 Совместимый с OBD/WWH-OBD сервер/ECU
С точки зрения внешнего диагностического оборудования, каждый совместимый с OBD/WWH-OBD сервер/ECU, совместимого с OBD/WWH-OBD транспортного средства, должен:
- поддерживать либо 11-битные, либо 29-битные идентификаторы сообщений CAN для сообщений запросов и ответов OBD/WWH-OBD;
- поддерживать одну пару идентификаторов CAN физического запроса и ответа в соответствии с 10.5;
- принимать идентификатор CAN функционального запроса поддерживаемого типа (11 бит или 29 бит, в соответствии с 10.5) для функционально адресованных сообщений запроса OBD/WWH-OBD;
- принимать идентификатор CAN физического запроса, связанный с идентификатором CAN физического ответа, для физически адресованных кадров данных FlowControl, отправляемых внешним диагностическим оборудованием (10.5);
- принимать идентификатор CAN физического запроса, для физически адресованных кадров данных SingleFrames или FirstFrames, сообщений запроса OBD/WWH-OBD, отправляемых внешним диагностическим оборудованием (10.5).
10.5 Карта диагностических адресов
10.5.1 OBD/WWH-OBD заголовки сообщений CAN
В следующих подразделах описывается использование 11-битных и 29-битных идентификаторов сообщений CAN в системе диагностики OBD/WWH-OBD. Далее представлена карта диагностических адресов для обоих наборов идентификаторов сообщений CAN. В таблице 5 определены диагностические адреса в зависимости от типов идентификаторов: физических или функциональных. Для 11-битных идентификаторов CAN подразумевается отображение целевого адрес () и адреса источника (
). Таблица 6 определяет использование 11-битных идентификаторов сообщений CAN в системе диагностики OBD/WWH-OBD.
Таблица 5 - Определение диагностических адресов в зависимости от типа идентификатора CAN
Идентификатор CAN | Целевой адрес ( | Адреса источника ( | Тип | Тип сообщения (Mtype) |
Функциональный запрос | Система | Внешнее диагностическое оборудование=0xF1 | Функцио- | Диагности- |
Физический ответ | Внешнее диагностическое оборудование=0xF1 | ECU OBD/WWH-OBD=0хХХ | Физический | Диагности- |
Физический запрос | ECU OBD/WWH-OBD | Внешнее диагностическое оборудование=0xF1 | Физический | Диагности- |
Идентификатор CAN | Целевой адрес ( | Адреса источника ( | Тип | Тип сообщения (Mtype) |
0хХХ - Физический диагностический адрес ECU. Примечание - Для подробного описания | ||||
Для системы OBD/WWH-OBD:
- идентификатор CAN функционального запроса должен использоваться для функционально адресованных сообщений запросов, отправляемых внешним диагностическим оборудованием; этот специфический идентификатор CAN отображает целевой адрес 0x33 (функциональная система OBD/WWH-OBD) и адрес источника
0xF1 (внешнее диагностическое оборудование);
- идентификатор CAN физического ответа должен использоваться для физически адресованных ответных сообщений, отправляемых электронными блоками управления OBD/WWH-OBD; этот специфический идентификатор CAN отображает целевой адрес 0xF1 (внешнее диагностическое оборудование) и физический диагностический адрес (
) ЭБУ (электронных блоков управления);
- идентификатор CAN физического запроса должен использоваться для физически адресованных сообщений запросов и для всех кадров данных FlowControl, отправляемых внешним диагностическим оборудованием; этот специфический идентификатор CAN отображает физический диагностический адрес () ЭБУ и адрес источника
0xF1 (внешнее диагностическое оборудование).
Идентификатор сервера (физический диагностический адрес) ECU OBD/WWH-OBD должен быть уникальным для данного, совместимого с OBD/WWH-OBD, транспортного средства.
Идентификаторы CAN, определенные для системы OBD/WWH-OBD, также могут использоваться для расширенной диагностики, если такое использование не мешает OBD/WWH-OBD.
10.5.2 11-битные заголовки сообщений CAN
В таблице 6 показаны 11-битные идентификаторы CAN системы OBD/WWH-OBD, основанной на предопределенной карте диагностических адресов.
Таблица 6 - 11-битные заголовки сообщений CAN системы OBD/WWH-OBD
Идентификатор CAN | Описание |
0x7DF | Идентификатор CAN для функционально адресованных сообщений запросов, отправляемых внешним диагностическим оборудованием |
0х7Е0 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 1 |
0х7Е8 | Идентификатор CAN физического ответа ECU N 1 внешнему диагностическому оборудованию |
0х7Е1 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 2 |
0х7Е9 | Идентификатор CAN физического ответа ECU N 2 внешнему диагностическому оборудованию |
0х7Е2 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 3 |
0х7ЕА | Идентификатор CAN физического ответа ECU N 3 внешнему диагностическому оборудованию |
0х7Е3 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 4 |
0х7ЕВ | Идентификатор CAN физического ответа ECU N 4 внешнему диагностическому оборудованию |
0х7Е4 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 5 |
0х7ЕС | Идентификатор CAN физического ответа ECU N 5 внешнему диагностическому оборудованию |
0х7Е5 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 6 |
0x7ED | Идентификатор CAN физического ответа ECU N 6 внешнему диагностическому оборудованию |
0х7Е6 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 7 |
0х7ЕЕ | Идентификатор CAN физического ответа ECU N 7 внешнему диагностическому оборудованию |
0х7Е7 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N 8 |
0x7EF | Идентификатор CAN физического ответа ECU N 8 внешнему диагностическому оборудованию |
Примечание - Хотя и не требуется для данных реализаций, но настоятельно рекомендуется (и может быть предусмотрено действующим законодательством), использовать для будущих реализаций следующие распределения 11-битных идентификаторов: - 0х7Е0/0х7Е8 для ЕСМ (электронного блока управления двигателем); - 0х7Е1/0х7Е9 для ТCM (ECU коробкой переключения передач). | |
10.5.3 29-битные заголовки сообщений CAN
В таблицах 7 и 8 показаны 29-битные идентификаторы CAN системы OBD/WWH-OBD, основанной на предопределенной карте диагностических адресов. 29-битные заголовки сообщений CAN должны соответствовать нормальным фиксированным форматам адресации, представленным в таблице 7, в соответствии с ИСО 15765-2.
Таблица 7 - Краткое описание 29-битного формата заголовков сообщений CAN - Нормальный фиксированный формат адресации
Номер бита идентификатора CAN | 28 | 24 | 23 | 16 | 15 | 8 | 7 | 0 |
Функциональный идентификатор CAN | 0х18 | 0хDB | ||||||
Физический идентификатор CAN | 0х18 | 0хDA | ||||||
Примечание - Значения идентификаторов CAN, представленных в данной тaблице, для определения приоритетности информации используют значения, установленные по умолчанию, в соответствии с ИСО 15765-2. | ||||||||
Таблица 8 - 29-битные заголовки сообщений CAN системы OBD/WWH-OBD
Идентификатор CAN | Описание |
0x18 DB 33 F1 | Идентификатор CAN функционального запроса от внешнего диагностического оборудования ECU N 33 |
0x18 DA XX F1 | Идентификатор CAN физического запроса от внешнего диагностического оборудования ECU N XX |
0x18 DA F1 XX | Идентификатор CAN физического ответа ECU N XX внешнему диагностическому оборудованию |
Примечание - Хотя и не требуется для данных реализаций, но настоятельно рекомендуется (и может быть предусмотрено действующим законодательством), использовать для будущих реализаций распределения физических адресов ECU из стандарта SAE J2178/1. | |
Максимальное количество ECU OBD/WWH-OBD в совместимом с OBD/WWH-OBD транспортном средстве не должно превышать восьми. Диагностический адрес, содержащийся в идентификаторе CAN, физического ECU ('0хХХ') должен быть уникальным для ECU OBD/WWH-OBD в данном транспортном средстве.
11 Канальный уровень
Все положения ИСО 11898-1 применимы для целей OBD/WWH-OBD со следующими ограничениями/дополнениями. Контроллер CAN внешнего диагностического оборудования должен иметь возможность передавать и принимать сообщения CAN с 11-битными и 29-битными идентификаторами (10.2).
Код длины данных CAN DLC (data length code), содержащийся в каждом диагностическом кадре данных CAN, всегда должен быть равен восьми. Неиспользованные байты данных кадра данных CAN являются неопределенными. Любой диагностический кадр данных CAN со значением DLC менее восьми должен игнорироваться принимающим объектом.
12 Физический уровень
12.1 Общие вопросы
Физический уровень и физическая передача данных внешнего диагностического оборудования должна соответствовать стандартам ИСО 11898-1 и ИСО 11898-2, с ограничениями и дополнениями, указанными в 12.2-12.4.
12.2 Скорости передачи данных внешнего диагностического оборудования
Внешнее диагностическое оборудование должно поддерживать скорости передачи данных OBD/WWH-OBD. Это требование может регулироваться законодательством. Если действующее законодательство не определяет скорости передачи данных, то необходимо использовать:
a) 250 кбит/с, или
b) 500 кбит/с.
12.3 Тактовая синхронизация CAN внешнего диагностического оборудования
12.3.1 Значения параметра тактовой синхронизации CAN
Указанные значения параметра тактовой синхронизации CAN относятся к внешнему диагностическому оборудованию. Совместимое с OBD/WWH-OBD транспортное средство может использовать различные значения параметра тактовой синхронизации для достижения совместимости скорости передачи данных OBD/WWH-OBD, однако, оно должно быть способно общаться с определенным внешним диагностическим оборудованием.
Далее, на основании ИСО 11898-1, определяются требуемые установки параметра тактовой синхронизации CAN внешнего диагностического оборудования. Все требования указаны для работы на скоростях передачи данных 250 кбит/с и 500 кбит/с. Тактовая синхронизация соответствует ISO 11898-1. Контроллер CAN должен поддерживать спецификации протокола CAN 2.0А (стандартный формат) и CAN 2.0В (расширенный формат 29-битных идентификаторов), а также соответствовать стандарту ИСО 11898-1.
Например, поддерживается усовершенствованный протокол для более высокой тактовой синхронизации (например, допускается прерывание сообщения на 2 бита) и кадры данных расширенных сообщений не должны быть повреждены, пока не будут зафиксированы ошибки в двоичном разряде.
Значения параметра тактовой синхронизации CAN, используемые в настоящей части стандарта, основываются на эквивалентных понятиях стандарта ИСО 11898-1:
- ![]() ,
,
- ![]() ,
,
- ![]() ,
,
- ![]() ,
,
- ![]() (номинальное время прохождения бита),
(номинальное время прохождения бита),
- =квант времени,
- ![]()
Соблюдение требований допуска номинального времени прохождения бита, представленных в настоящей части стандарта, непосредственно зависит от системного времени синхронизации CAN внешнего диагностического оборудования и программируемого значения номинального времени прохождения бита. В типичном контроллере CAN значение номинального времени прохождения бита должно быть кратно периодам системных часов. Когда программируемое значение номинального времени прохождения бита устанавливается точно в соответствии со значением номинального времени прохождения бита, на точность оказывает влияние только погрешность времени системных часов. В противном случае, точность зависит от обоих факторов: отклонение программируемого значения номинального времени прохождения бита от номинального времени и погрешности времени системных часов. Влияние эффектов от смещения или "устаревания" системного источника тактовой синхронизации и от невозможности достижения желаемого значения номинального времени прохождения бита является накопительным; спецификация допуска времени прохождения бита должна уточняться после рассмотрения обоих факторов.
Рисунок 8 показывает разбиение времени прохождения бита CAN.
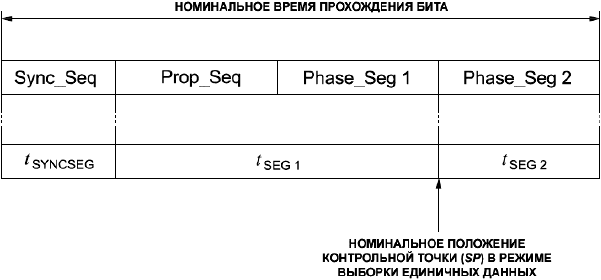
Рисунок 8 - Разбиение времени прохождения бита шины CAN
12.3.2 Номинальная скорость передачи данных 250 кбит/с
Таблица 9 определяет допустимые значения параметра CAN времени прохождения бита для скорости передачи данных 250 кбит/с. Внешнее диагностическое оборудование должно работать в режиме выборки единичных данных.
Таблица 9 - Значения параметра CAN времени прохождения бита для скорости передачи данных 250 кбит/с - режим выборки единичных данных
Параметр | Минимум | Номинал | Максимум |
| 3980 нс | 4000 нс | 4020 нс |
| 3994 нс | 4000 нс | 4006 нс |
- | - | 250 нс | |
- | - | 0,15% | |
Примечание - Минимальные и максимальные значения номинального времени прохождения бита Минимальные и максимальные значения номинального времени прохождения бита | |||
Допуск номинальной скорости передачи данных 250 кбит/с внешнего диагностического оборудования должен составлять ±0,15%.
В таблице 10 представлены единственно разрешенные значения параметра тактовой синхронизации CAN для внешнего диагностического оборудования, основанные на стандартном кванте времени () и временных параметрах, перечисленных в 12.3.1.
Таблица 10 - значения параметра CAN времени прохождения бита для скорости передачи данных 250 кбит/с для стандартного кванта времени
|
|
|
| Номинальное положение контрольной точки, % |
200 | 600 | 3000 | 800 | 80 |
250 | 750 | 3000 | 750 | 81,25 |
Примечание - Номинальное положение контрольной точки определяется относительно времени прохождения одного бита. | ||||
12.3.2* Номинальная скорость передачи данных 500 кбит/с
________________
* Нумерация соответствует оригиналу. - .
Таблица 11 определяет допустимые значения параметра CAN времени прохождения бита для скорости передачи данных 500 кбит/с. Внешнее диагностическое оборудование должно работать в режиме выборки единичных данных. Допуск номинальной скорости передачи данных 500 кбит/с внешнего диагностического оборудования должен составлять ±0,15%.
Таблица 11 - Значения параметра CAN времени прохождения бита для скорости передачи данных 500 кбит/с - режим выборки единичных данных
Параметр | Минимум | Номинал | Максимум |
| 1990 нс | 2000 нс | 2010 нс |
| 1997 нс | 2000 нс | 2003 нс |
- | - | 125 нс | |
- | - | 0,15% | |
Примечание - Минимальные и максимальные значения номинального времени прохождения бита Минимальные и максимальные значения номинального времени прохождения бита | |||
В таблице 12 представлены единственно разрешенные значения параметра тактовой синхронизации CAN для внешнего диагностического оборудования, основанные на стандартном кванте времени () и временных параметрах, перечисленных в пункте 12.3.1.
Таблица 12 - Значения параметра CAN времени прохождения бита для скорости передачи данных 500 кбит/с для стандартного кванта времени
|
|
|
| Номинальное положение контрольной точки, % |
100 | 300 | 1500 | 400 | 80 |
125 | 375 | 1500 | 375 | 81,25 |
Примечание - Номинальное положение контрольной точки определяется относительно времени прохождения одного бита. | ||||
12.4 Внешнее диагностическое оборудование
12.4.1 Общие вопросы
Далее определяются электротехнические параметры, которым должно соответствовать внешнее диагностическое оборудование. Требования разделяются на относящиеся к интерфейсу CAN внешнего диагностического оборудования и к соединительному кабелю внешнего диагностического оборудования.
На рисунке 9 показаны электротехнические параметры внешнего диагностического оборудования.
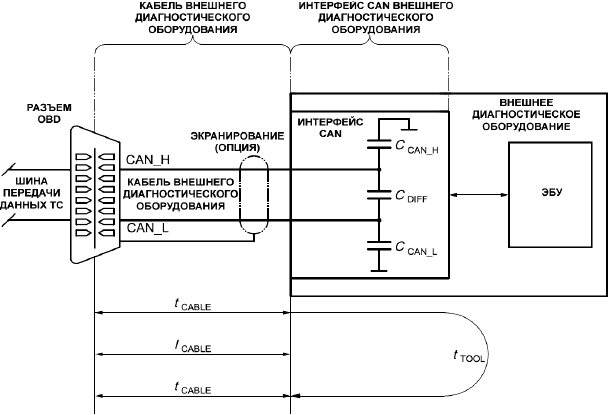
Рисунок 9 - Электротехнические параметры внешнего диагностического оборудования
12.4.2 Интерфейс CAN
12.4.2.1 Емкостная нагрузка
Подпункты 12.4.2 до 12.4.3 определяют необходимые электротехнические параметры для интерфейса CAN внешнего диагностического оборудования, за исключением соединительного кабеля (см. 12.4.3) и разъема OBD/WWH-OBD.
Емкостная нагрузка внешнего диагностического оборудования не включает в себя емкостную нагрузку соединительного кабеля. Эти значения относятся только к аппаратным средствам интерфейса CAN внешнего диагностического оборудования, за исключением оконечной нагрузки (см. 12.4.2.3.3), и рассматриваются во время рецессивного состояния, когда внешнее диагностическое оборудование отключено от соединительного кабеля и оконечная нагрузка еще не установлена. См. таблицу 13.
Таблица 13 - Емкостная нагрузка внешнего диагностического оборудования - без емкостной нагрузки соединительного кабеля
Параметр | Минимум | Номинал | Максимум, пФ | Описание |
| - | - | 50 | Между САN_Н и САN_L |
| - | - | 100 | Между CAN_H/CAN_L и нулевым потенциалом |
12.4.2.2 Задержка распространения
Задержка распространения сигнала внешнего диагностического оборудования не включает в себя задержку распространения сигнала в соединительном кабеле. Это значение относится только к аппаратным средствам интерфейса CAN внешнего диагностического оборудования. Данное требование основано на наиболее критическом распределении времени при функционировании системы OBD/WWH-OBD со скоростью передачи данных 500 кбит/с. Задержка распространения сигнала внешнего диагностического оборудования (задержка в контуре - loop delay) включает в себя все задержки, которые могут быть вызваны интерфейсом CAN внешнего диагностического оборудования (например, задержки приемо-передатчика CAN, задержки контроллера CAN). См. таблицу 14.
Таблица 14 - Задержка распространения сигнала внешнего диагностического оборудования - задержка в контуре без учета задержки распространения сигнала в соединительном кабеле
Параметр | Минимум | Номинал | Максимум, нс | Описание |
| - | - | 390 | Задержка в контуре внешнего диагностического оборудования |
12.4.2.3 Оконечная нагрузка шины CAN
12.4.2.3.1 Общие вопросы
Данный подраздел определяет требования к оконечной нагрузке, которые должны выполняться внешним диагностическим оборудованием.
Рисунок 10 иллюстрирует организацию оконечной нагрузки шины CAN внешнего диагностического оборудования.
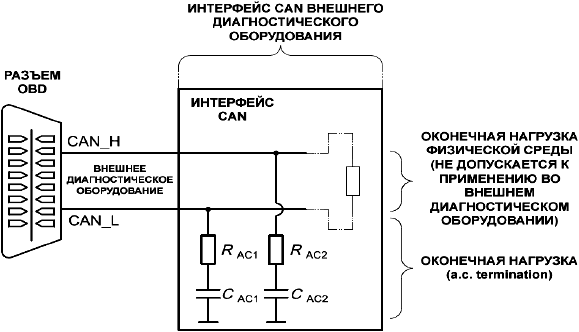
Рисунок 10 - Оконечная нагрузка шины CAN внешнего диагностического оборудования
12.4.2.3.2 Оконечная нагрузка физической среды
Во внешнем диагностическом оборудовании не должно быть никакого оконечного сопротивления между проводами CAN_H и CAN_L для адаптации к сопротивлению физической среды. Внешнее диагностическое оборудования должно представлять собой узел (без оконечной нагрузки) шины CAN, к которой оно подключается.
12.4.2.3.2* Оконечная нагрузка
________________
* Нумерация соответствует оригиналу. - .
Внешнее диагностическое оборудование должно иметь только оконечную нагрузку (а.с. termination), обеспечивающую минимальные отражения сигналов на шину CAN. См. таблицу 15.
Примечание - Отражения сигналов на шину CAN происходят в интерфейсе CAN внешнего диагностического оборудования, потому что запрещено использование во внешнем диагностическом оборудовании оконечного сопротивления физической среды для адаптации к ее сопротивлению (см. 12.4.2.3.2).
Таблица 15 - Параметры оконечного сопротивления внешнего диагностического оборудования
Параметр | Минимум | Номинал | Максимум | Описание |
| 90 Ом | 100 Ом | 110 Ом | Оконечное сопротивление |
| 470 пФ | 560 пФ | 640 пФ | Емкость оконечной нагрузки |
| ||||
12.4.3 Соединительный кабель внешнего диагностического оборудования
12.4.3.1 Длина соединительного кабеля
Кабель внешнего диагностического оборудования должен обеспечивать соединение OBD/WWH-OBD разъема транспортного средства с интерфейсом CAN внешнего диагностического оборудования (см. 12.4.2).
Под длиной соединительного кабеля понимается длина кабеля между OBD/WWH-OBD разъемом транспортного средства и интерфейсом CAN внешнего диагностического оборудования (см. таблицу 16).
Таблица 16 - Длина соединительного кабеля внешнего диагностического оборудования
Параметр | Минимум | Номинал | Максимум, м | Описание |
| - | - | 5 | Длина кабеля |
12.4.3.2 Задержка распространения
Задержка распространения сигнала в соединительном кабеле не включает в себя задержку распространения сигнала во внешнем диагностическом оборудовании. Это значение относится только к соединительному кабелю. Данное требование основано на наиболее критическом распределении времени при функционировании системы OBD/WWH-OBD со скоростью передачи данных 500 кбит/с. Задержка распространения сигнала в соединительном кабеле определяется, как задержка при прохождении сигнала в одну сторону от OBD/WWH-OBD разъема до интерфейса CAN внешнего диагностического оборудования (см. таблицу 17).
Таблица 17 - Задержка распространения сигнала в соединительном кабеле внешнего диагностического оборудования
Параметр | Минимум | Номинал | Максимум, нс | Описание |
| - | - | 27,5 | Время задержки |
12.4.3.3 Требования к соединительному кабелю
К соединительному кабелю внешнего диагностического оборудования предъявляются следующие требования:
- никакие другие провода не должны быть скручены с проводами CAN_H или CAN_L. Тем не менее, допускается скручивание проводов CAN проводом заземления;
Примечание - В дальнейшем не будет требований к скручиваниям.
- провода CAN_H и CAN_L должны иметь одинаковую длину и должны пройти одинаковый путь по всей длине кабеля;
- провода CAN_H и CAN_L не должны размещаться вместе с излучающими проводами, вызывающими на обоих проводах CAN шумовую модуляцию более 0,5 В относительно заземления;
- если длина соединительного кабеля внешнего диагностического оборудования превышает 1 м, то кабель должен быть экранированным. Оплетка экранирования должна быть соединена с выводом заземления на OBD/WWH-OBD разъеме.
Приложение ДА
(обязательное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации (и действующим в этом качестве межгосударственным стандартам)
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ИСО 11898-2 | - | * |
ИСО 15031-3 | - | * |
ИСО 15031-5 | - | * |
ИСО 15765-2 | - | * |
ИСО 27145-3 | - | * |
ИСО 27145-4 | - | * |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. | ||
Библиография
[1] | ISO/IEC 7498-1 | Information technology - Open Systems Interconnection - Basic Reference Model: The Basic Model |
[2] | ISO 7498-2 | Information processing systems - Open Systems Interconnection - Basic Reference Model - Part 2: Security Architecture |
[3] | ISO/IEC 7498-3 | Information technology - Open Systems Interconnection - Basic Reference Model: Naming and addressing |
[4] | ISO/IEC 7498-4 | Information processing systems - Open Systems Interconnection - Basic Reference Model - Part 4: Management framework |
[5] | ISO/IEC 10731:1994 | Information technology - Open Systems Interconnection - Basic Reference Model - Conventions for the definition of OSI services |
[6] | ISO 11898-3 | Road vehicles - Controller area network (CAN) - Part3: Low-speed, fault tolerant, medium-dependent interface |
[7] | ISO 14229-1 | Road vehicles - Unified diagnostic services (UDS) - Part 1: Specification and requirements |
[8] | ISO 14229-2 | Road vehicles - Unified diagnostic services (UDS) - Part 2: Session layer services |
[9] | ISO 14229-3 | Road vehicles - Unified diagnostic services (UDS) - Part3: Unified diagnostic services on CAN implementation (UDSonCAN) |
[10] | ISO 15031-2 | Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part 2: Guidance on terms, definitions, abbreviations and acronyms |
[11] | ISO 15031-3 | Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part3: Diagnostic connector and related electrical circuits, specification and use |
[12] | ISO 15031-6 | Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part 6: Diagnostic trouble code definitions |
[13] | ISO 15765-1 | Road vehicles - Diagnostic communication over Controller Area Network (DoCAN) - Part 1: General information and use case definition |
[14] | ISO 27145-2 | Road vehicles - Implementation of WWH-OBD communication requirements - Part 2: Common data dictionary |
[15] | SAE J1930-DA | Digital Annex of Electrical/Electronic Systems Diagnostic Terms, Definitions, Abbreviations, and Acronyms |
[16] | SAE J1939 | Recommended Practice for a Serial Control and Communications Vehicle Network |
[17] | SAE J1939-73 | Application Layer Diagnostics |
[18] | SAE J1979-DA | Digital Annex of E/E Diagnostic Test Modes |
[19] | SAE J2012-DA | Digital Annex of Diagnostic Trouble Code Definitions and Failure Type Byte Definitions |
[20] | SAE J2178/1 | Class В data communication network messages detailed header formats and physical address assignments |
________________________________________________________________________________________
УДК 629.054:006.354 OКC 43.040.15
Ключевые слова: внешнее диагностическое оборудование, шина передачи данных CAN, бортовая диагностика, протокол диагностической связи
________________________________________________________________________________________
Электронный текст документа
и сверен по:
, 2015
