ГОСТ Р 71063-2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Информационные технологии
РОБОТОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ. ИНТЕРОПЕРАБЕЛЬНОСТЬ
Общие положения
Information technologies. Robotic complexes. Interoperability. General provisions
ОКС 35.240.50
Дата введения 2024-01-30
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Информационно-аналитический вычислительный центр" (ООО ИАВЦ)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 022 "Информационные технологии"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 30 октября 2023 г. N 1297-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Роботизация представляет одно из важнейших направлений цифровой трансформации промышленности, частью которых являются робототехнические комплексы (РТК).
В комплексе стандартов ГОСТ Р 60 целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров. Однако в этом комплексе не приведены рекомендации по интероперабельности.
В условиях развивающейся цифровизации промышленных производств интероперабельность играет ключевую роль при создании, развитии и объединении роботов в РТК, ячейки и линии (см. [1] и [2]).
Обеспечение интероперабельности РТК является одной из главных основ формирования и развития информационного общества, цифровой трансформации промышленности, оборонно-промышленного комплекса.
Разнородные роботы, РТК, ячейки (с программным управлением (см. [3], [4]), искусственным интеллектом (см. [5]) и т.д.) должны взаимодействовать друг с другом, причем уровень гетерогенности среды, в которой они будут функционировать, будет постоянно расти.
Наличие стандартов является необходимым, но недостаточным условием обеспечения интероперабельности РТК, для которого необходим определенный подход (методика). В качестве такого подхода в настоящем стандарте используется подход, зафиксированный в ГОСТ Р 55062. Подход относится к информационным системам самого широкого класса, т.е. представляет собой метатехнологию и апробирован на различных объектах. ГОСТ Р 55062 не имеет прямых зарубежных аналогов, прошел апробацию и относится к стандартам двойного назначения.
Интероперабельность должна достигаться на трех уровнях: на нижнем - техническом, на среднем - семантическом и верхнем - организационном, где используют не стандарты (нормативно-технические документы), а нормативно-правовые документы, такие как соглашения, постановления, приказы и др.
Подход включает ряд этапов, ключевым из которых служит построение профиля интероперабельности. В основе построения профиля лежит использование согласованного рационального набора стандартов. Специфика применения подхода по обеспечению РТК проявляется в составе стандартов и других документов, входящих в профиль.
Таким образом, настоящий стандарт представляет собой адаптацию положений ГОСТ Р 55062 применительно к РТК.
1 Область применения
Областью применения настоящего стандарта являются робототехнические комплексы (РТК).
Целью настоящего стандарта является определение общих положений по обеспечению интероперабельности РТК, промышленных РТК, промышленных роботизированных ячеек в ходе их создания, развития и применения.
Настоящий стандарт определяет:
- основные понятия, связанные с понятием РТК и "интероперабельность";
- модель интероперабельности РТК;
- единый подход (методику) к обеспечению интероперабельности РТК и их компонентов в промышленных средах;
- основные этапы по достижению интероперабельности РТК.
Настоящий стандарт предназначен для заказчиков, поставщиков, разработчиков, потребителей, а также персонала, сопровождающего РТК в промышленных средах (см. [6]). Настоящий стандарт не относится к другим классам РТК, кроме промышленных.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 1.12 Стандартизация в Российской Федерации. Термины и определения
ГОСТ Р 60.0.0.2 Роботы и робототехнические устройства. Классификация
ГОСТ Р 55062 Информационные технологии. Интероперабельность. Основные положения
ГОСТ Р 70569 Информационные технологии. Сетецентрические информационнно-управляющие системы. Интероперабельность
ГОСТ Р ИСО/МЭК 25010 Информационные технологии. Системная и программная инженерия. Требования и оценка качества систем и программных средств (SQuaRE). Модели качества систем и программных продуктов
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 1.12, а также следующие термины с соответствующими определениями:
3.1
автономность (autonomy): Способность выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека. [ГОСТ Р 60.0.0.4-2023, статья 3.2] |
3.2 адаптивные роботы (роботы 2-го поколения) (adaptive robots): Промышленные роботы, приспособленные к изменяющейся внешней среде и не требующие точного позиционирования деталей (могут включать в себя локационные и тактильные системы, системы технического зрения).
3.3
архитектура (arhitecture): Фундаментальная организация системы, реализованная в ее компонентах, их взаимосвязях друг с другом и с окружающей средой, и руководящие правила проектирования и развития системы. [ГОСТ Р 55062-2021, пункт 3.1.1] |
3.4
барьер интероперабельности (interoperability barrier): Несовместимость сущностей, которая препятствует обмену информацией с другими сущностями, использованию сервисов или общему пониманию обмененных элементов. [ГОСТ Р 55062-2021, пункт 3.1.3] |
Примечание - Сущность в робототехнических комплексах: промышленные роботы, рабочие органы.
3.5
совместные действия роботов (robot cooperation): Обмен информацией и действиями между несколькими роботами для обеспечения эффективного выполнения задания за счет их совместных перемещений. [ГОСТ Р 60.0.0.4-2023, статья 3.14] |
3.6
глоссарий интероперабельности (glossary of interoperability): Термины и определения, используемые в области интероперабельности с толкованием, иногда переводом на другой язык, комментариями и примерами. [ГОСТ Р 55062-2021, пункт 3.1.6] |
3.7 датчик робота (robot sensor): Измерительный преобразователь, предназначенный для получения внутренней и внешней информации о состоянии робота и окружающей среды для управления робототехническим комплексом.
3.8 интеграция робототехнического комплекса (integration of the robotic technological complexes): Процесс объединения робототехнического комплекса с другим оборудованием или с другой машиной (включая других роботов) с целью создания прикладной робототехнической системы, способной выполнять полезную работу.
3.9
интегрированная система (integrated system): Система, в которой все входящие в нее подсистемы работают по единому алгоритму, т.е. имеет единую точку управления. [ГОСТ Р 55062-2021, пункт 3.1.7] |
3.10 интеллектуальные роботы (роботы 3-го поколения) (intelligent robots): Промышленные роботы, которые могут распознавать объекты и их состояние, и на основе этого распознавания автоматически определять действия, которые им следует выполнить.
3.11 интеллектуальная система управления транспортными средствами (intelligent vehicle management system): Система управления, интегрирующая современные информационные и телематические технологии и предназначенная для автоматизированного поиска и принятия к реализации максимально эффективных сценариев управления робототехническими комплексами.
Примечание - Экономический эффект как целевая функция автоматизации.
3.12
интероперабельность (interoperability): Способность двух или более информационных систем или компонентов к обмену информацией и к использованию информации, полученной в результате обмена. [ГОСТ Р 55062-2021, пункт 3.1.8] |
3.13
интероперабельная система (interoperable system): Система, элементы, компоненты, подсистемы которой без каких-либо барьеров обмениваются информацией и используют информацию, полученную в результате такого обмена. [ГОСТ Р 59796-2021, статья 8] |
3.14 комплексирование датчиков (sensor fusion): Процесс получения обобщенной и улучшенной информации с помощью интеграции информации от нескольких датчиков.
3.15 карта [модель] внешней среды (environment map/environment model): Карта или модель, описывающая внешнюю среду и ее характерные особенности.
Пример - Карта с координатной сеткой, геометрическая карта, топологическая карта, семантическая карта.
3.16
манипуляционный робот (manipulation robot): Автоматически управляемый, перепрограммируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть установлен стационарно или на мобильной платформе. [ГОСТ Р 60.0.0.2-2016, пункт 3.11] |
3.17
мобильный робот (mobile robot): Робот, способный перемещаться под своим собственным управлением. [ГОСТ Р 60.0.0.4-2023, статья 4.15] |
3.18
мобильная платформа (mobile platform): Совокупность компонентов, обеспечивающих передвижение. [ГОСТ Р 60.0.0.4-2023, статья 4.16] |
3.19 наземный промышленный робот; НПР (ground-based industrial robot): Робот, находящийся в постоянном контакте с поверхностью.
3.20
организационная интероперабельность (organizational interoperability): Интероперабельность на уровне общих целей, бизнес-процессов, нормативно-правовых актов. [ГОСТ Р 59796-2021, статья 23] |
3.21
подход к достижению интероперабельности (interoperability approach): Способ, с помощью которого решаются проблемы и преодолеваются барьеры интероперабельности. [ГОСТ Р 55062-2021, пункт 3.1.17] |
3.22
показатель интероперабельности (measure of interoperability): Совокупность параметров или величин, качественно и количественно оценивающих степень достижения интероперабельности. [Адаптировано из ГОСТ Р 59796-2021, статья 45] |
3.23
программа выполнения задания (task program): Совокупность команд, определяющих движения и другие функции робота, необходимые для выполнения конкретного задания для робота или робототехнического комплекса. [ГОСТ Р 60.0.0.4-2023, статья 6.1] |
Примечания
1 Данный тип программы обычно создается после установки робота и может модифицироваться под определенные условия обученным специалистом.
2 Задание определяет конкретные действия в рамках области применения, под которой понимается обобщенное поле деятельности.
3.24
промышленный робот (industrial robot): Автоматически управляемый, перепрограммируемый, универсальный манипулятор, программируемый потрем или более степеням подвижности, который может быть установлен стационарно либо на мобильной платформе для применения в прикладных задачах автоматизации в промышленной среде. [ГОСТ Р 60.0.0.4-2023, статья 3.6] |
Примечания
1 Промышленные роботы (ПР) подразделяют:
- на промышленные манипуляционные роботы, выполняющие основные технологические операции;
- промышленные транспортные роботы, осуществляющие внутрицеховые и межцеховые перемещения грузов.
2 В состав промышленного робота входят:
- манипулятор, включая приводы;
- контроллер, включая пульт обучения и любой коммуникационный интерфейс (аппаратный и программный).
3 Принято делить на ПР 1, 2 и 3-го поколения.
Роботы 1-го поколения имеют "жесткое" программное управление и требуют точного позиционирования деталей, с которыми работают (методы обучения).
3.25
промышленный транспортный робот; ПТР (transport robot): Мобильный робот, предназначенный для перемещения на своей платформе физических объектов. [Адаптировано из ГОСТ Р 60.0.0.2-2016, пункт 3.12] |
Примечание - На транспортном роботе могут быть установлены манипуляционный робот или иное устройство для выполнения погрузо-разгрузочных операций.
3.26
(промышленный) робототехнический комплекс [(industrial) robot system]: Комплекс, состоящий из промышленного робота, рабочего органа(ов), датчиков на рабочем органе и оборудования (например, системы технического зрения, устройства для нанесения покрытия, сварочного контроллера), необходимого для выполнения задач по назначению, а также программы выполнения задач. [ГОСТ Р 60.0.0.4-2023, статья 3.9] |
Примечание - По способу установки на рабочем месте промышленные роботы подразделяют на:
- напольные промышленные роботы;
- подвесные промышленные роботы;
- встроенные промышленные роботы.
3.27 промышленная роботизированная ячейка (industrial robot cell): Один или несколько промышленных робототехнических комплексов, включая связанные с ними машины и оборудование, а также соответствующее защищенное пространство и защитные меры.
3.28
профиль интероперабельности (interoperability profile): Согласованный набор стандартов, структурированный в терминах модели интероперабельности. [ГОСТ Р 55062-2021, пункт 3.1.18] |
3.29
рабочий орган (end effector): Устройство, специально разработанное для закрепления на механическом интерфейсе с целью обеспечить выполнение задания роботом. [ГОСТ Р 60.0.0.4-2023, статья 4.12] |
3.30
робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования. [ГОСТ Р 60.0.0.4-2023, статья 3.1] |
3.31 робототехнический комплекс; РТК (robotic technological complexes): Автономно действующее средство производства, состоящее из одной или группы единиц производственного оборудования и взаимодействующее с одним промышленным роботом, включающее набор вспомогательного оборудования, для обеспечения автоматического цикла работы внутри комплекса.
Примечание - Состав РТК: манипулятор, исполнительное устройство (программа выполнения задания, управляющая программа, искусственный интеллект, АСУ, промышленный робот, рабочий орган), измерительные устройства (датчики и т.д), вспомогательное оборудование (например, контроля параметров безопасности функционирования РТК).
3.32
семантическая интероперабельность (semantic interoperability): Способность взаимодействующих систем одинаковым образом интерпретировать смысл информации, которой они обмениваются. [ГОСТ Р 59796-2021, статья 25] |
3.33
сервисный робот (service robot): Робот, выполняющий нужную для человека или оборудования работу, за исключением применений в целях промышленной автоматизации. [ГОСТ Р 60.0.0.2-2016, пункт 3.6] |
3.34
техническая интероперабельность (technical interoperability): Интероперабельность на уровне технических средств, аппаратных и программных комплексов, их интерфейсов и протоколов обмена информацией, а также форматов представления информации. [ГОСТ Р 59796-2021, статья 26] |
3.35
управляющая программа (control program): Встроенная совокупность команд управления, определяющая возможности, действия и реакции робота или робототехнического комплекса. [ГОСТ Р 60.0.0.4-2023, статья 6.2] |
Примечание - Данный тип программы обычно создается до установки и впоследствии может модифицироваться изготовителем.
3.36
уровень интероперабельности (interoperability level): Уровень, на котором осуществляется взаимодействие участников. [ГОСТ Р 55062-2021, пункт 3.1.22] |
3.37
целостность (integrity): Свойство системы, отражающее логическую корректность и безопасность операционной системы, логическую полноту аппаратных средств и программного обеспечения, которые реализуют защитные механизмы, а также согласованность структуры и содержания хранимых данных. [ГОСТ Р 59505-2021, пункт 3.1.21] |
3.38
эталонная модель интероперабельности (interoperability reference model): Трехуровневая модель, представляющая собой развитие прикладного уровня эталонной семиуровневой модели взаимосвязи открытых систем. [ГОСТ Р 59796-2021, статья 20] |
4 Сокращения
В настоящем стандарте использованы следующие сокращения:
АСУ | - автоматизированные системы управления; |
ИКТ | - информационно-коммуникационные технологии; |
ПР | - промышленный робот; |
РТК | - робототехнический комплекс; |
СТЗ | - системы технического зрения. |
5 Общие положения
Для обеспечения соответствия настоящему стандарту любое конкретное решение по достижению интероперабельности РТК должно быть получено разработчиком РТК на основе единого подхода, содержащего ряд основных и вспомогательных этапов, определенных в ГОСТ Р 55062 и адаптированных к РТК настоящим стандартом.
К основным этапам такой адаптации относятся:
- разработка концепции интероперабельности РТК;
- построение архитектуры интероперабельности РТК;
- построение проблемно-ориентированной модели интероперабельности РТК;
- построение профиля интероперабельности РТК;
- программно-аппаратная реализация РТК в соответствии со стандартами, входящими в профиль;
- аттестационное тестирование.
К вспомогательным этапам относятся:
- разработка документа, содержащего план (дорожную карту) разработки стандартов;
- разработка необходимых национальных стандартов;
- разработка терминов и определений (глоссария).
6 Методика обеспечения интероперабельности робототехнических комплексов
Методика обеспечения интероперабельности РТК, как показано на рисунке 1, состоит из ряда основных (1-6) и вспомогательных (7-9) этапов. Первые четыре основных этапа можно отнести к "теоретическим", не требующим использования программных или технических средств. Этапы 5, 6 можно отнести к "экспериментальным", требующим привлечения разработчиков, и технических средств, в том числе аттестованных. Последовательная реализация основных этапов должна привести к обеспечению интероперабельности промышленных РТК. Для успешной реализации всего процесса достижения интероперабельности необходимо также создать "Дорожную карту" (план разработки стандартов) (этап 7) и разработать необходимые национальные стандарты (этап 8), которые должны постоянно актуализироваться. Кроме того, необходимо разработать глоссарий (термины и определения) (этап 9), чтобы все участники (пользователи, разработчики РТК и поставщики программно-аппаратных средств) на всех этапах достижения интероперабельности могли находить взаимопонимание. [ГОСТ Р 55062-2021, раздел 6] |
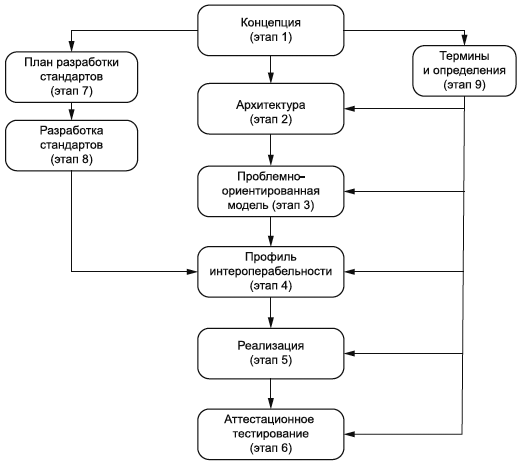 |
Рисунок 1 - Методика обеспечения интероперабельности робототехнических комплексов
6.1 Создание концепции интероперабельности РТК
6.1.1 Концепция интероперабельности РТК, включая промышленные РТК, должна представлять собой нормативный документ, отражающий все возможные точки зрения и все аспекты обеспечения интероперабельности РТК, учитывать карту внешней среды, особенности интеллектуальной системы управления транспортными средствами, комплексирование датчиков робота, общую целостность.
6.1.2 В концепции интероперабельности конкретных РТК должно быть конкретизировано определение понятий "интероперабельность" и "робототехнические комплексы", данное официальной организацией по стандартизации. Наряду с понятием "интероперабельность" допустимо использовать еще целый ряд родственных понятий, такие как совместимость на уровне протоколов передачи данных (coexistent), способность к соединению (interconnectable), способность к взаимодействию (interworkable).
6.1.3 В концепции необходимо отметить также разницу между интегрированными системами и интероперабельными системами РТК (см. [7], [8]). Интегрированная система предполагает, что входящие в нее подсистемы работают по согласованному алгоритму или, другими словами, имеют единую точку управления. В интероперабельной системе РТК входящие в нее подсистемы работают по независимым алгоритмам, не имеют единой точки управления, все управление определяется единым набором используемых стандартов - профилем.
6.1.4 Концепция интероперабельности РТК должна содержать краткое описание всех этапов обеспечения интероперабельности РТК.
6.1.5 Концепция должна содержать оценку экономического эффекта от достижения интероперабельности РТК. Основной источник экономии при создании интероперабельных систем РТК - отсутствие необходимости разрабатывать дополнительные интерфейсы (переходные модули, шлюзы).
6.1.6 В концепции указывают барьеры, препятствующие достижению интероперабельности РТК, и подходы к их преодолению (см. ГОСТ Р 55062).
6.1.7 В концепции должно быть указано, что интероперабельность РТК не является абсолютным понятием и имеются возможности количественной оценки степени интероперабельности. Для количественной оценки интероперабельности целесообразно использовать положения ГОСТ Р ИСО/МЭК 25010.
При необходимости в концепцию интероперабельности РТК могут быть включены дополнительные положения, например положения о защите информации при внедрении РТК и др.
6.1.8 В концепции следует подчеркнуть требования о необходимости достижения интероперабельности РТК на трех уровнях: техническом, семантическом и организационном.
6.1.9 Концепция может быть оформлена как самостоятельный нормативный документ.
6.2 Построение архитектуры
6.2.1 Архитектура - это фундаментальная организация РТК, реализованная в компонентах, их взаимосвязях друг с другом и с окружающей средой, и руководящие правила проектирования и развития РТК. Следует учитывать мировую тенденцию к переходу от "классической" иерархической архитектуры к сетецентрической (см. ГОСТ Р 70569).
6.2.2 Роботы, а также РТК, представляют весьма широкий класс объектов, имеющих свои подклассы, к которым относятся адаптивные роботы, интеллектуальные роботы, наземные промышленные роботы, сервисные роботы и др. С точки зрения решения проблемы интероперабельности каждый РТК класс объекта следует представить в рациональном наборе принятых стандартов - профилях.
6.3 Построение проблемно-ориентированной модели интероперабельности
Проблемно-ориентированная модель может иметь ряд уровней интероперабельности за счет "расщепления" уровней эталонной модели в зависимости от вида интероперабельности. К этим видам могут относиться: динамическая, концептуальная, интеграционная интероперабельность (см. ГОСТ Р 55062).
Для обеспечения интероперабельности РТК окончательные технические решения должны выбираться с учетом (см. ГОСТ Р 55062) проблемно-ориентированной модели интероперабельности (этап 3 на рисунке 1). Проблемно-ориентированная модель интероперабельности РТК представлена на рисунке 2.
Данная проблемно-ориентированная модель интероперабельности РТК построена с применением перечня ключевых компонентов, приведенных в ГОСТ Р 60.0.0.2.
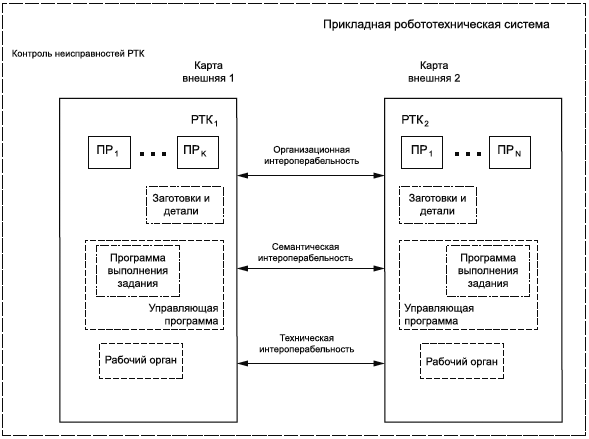 |
Рисунок 2 - Проблемно-ориентированная модель интероперабельности робототехнических комплексов
6.4 Построение профиля интероперабельности РТК
Профиль интероперабельности РТК - это согласованный рациональный набор стандартов, расположенных по уровням проблемно-ориентированной модели интероперабельности РТК. Процесс построения профиля интероперабельности РТК, в сущности, такой же, как при построении профиля организации-пользователя, описанного в ГОСТ Р 55062. Этот процесс состоит в последовательной идентификации требований к РТК, требований к процессам и службам, необходимым для выполнения этих требований. Его можно представить в виде ряда этапов. На заключительном этапе и происходит построение профиля. В профиль интероперабельности РТК должны входить ГОСТ Р и другие документы национальной системы стандартизации в области интероперабельности, стандарты серии Р 60, предназначенные для повышения интероперабельности роботов и их комплексов. Кроме стандартов технического уровня в профиль могут входить стандарты и нормативно-правовые документы верхних уровней модели.
Примечание - На семантическом уровне в профиль должны быть включены стандарты о качестве данных, синтаксисе, семантическом кодировании и соответствии спецификации данных. На организационном уровне в профиль должны быть включены нормативно-правовые документы (см. [5]).
6.5 Реализация
В концепции на этапе реализации должны определяться принципы компоновки программно-аппаратных средств РТК в соответствии со стандартами, вошедшими в профиль интероперабельности РТК.
6.6 Аттестационное тестирование
Концепция должна учитывать, что аттестационное тестирование технической, семантической (включая синтаксическую) и организационной интероперабельности РТК необходимо проводить регулярно, на каждой итерации создания (модернизации) системы РТК.
6.7 Вспомогательные этапы
Для успешной реализации процесса достижения интероперабельности РТК необходимо создание "Дорожной карты" (план разработки стандартов) (этап 7) и разработка необходимых национальных стандартов (этап 8), которые следует постоянно актуализировать.
Кроме того, необходима разработка глоссария (термины и определения) (этап 9) в целях обеспечения взаимопонимания всех участников (разработчики РТК, поставщики операционных систем и программно-аппаратных средств для роботов, пользователи) на каждом этапе достижения интероперабельности РТК.
Библиография
[1] | Башлыкова А.А., Олейников А.Я., Осиньска К.Х. Актуальное состояние проблемы интероперабельности. ИТ-Стандарт, 2021, N 2(23). с.37-42 |
[2] | Романов М.П., Романов А.М., Каширская Е.Н., Холопов В.А., Харченко А.И. Новая архитектура исполнительного уровня для систем управления дискретным машиностроительным производством//Мехатроника, автоматизация, управление. 2017. Т.18. N 1. с.64-72 |
[3] | Лопота А.В., Юревич Е.И. Этапы и перспективы развития модульного принципа построения робототехнических систем//Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Информатика. Телекоммуникации. Управление. - 2013. - N 1 (164) |
[4] | Лохин В.М., Романов М.П., Трипольский П.Э. Повышение эффективности разработки роботов специального назначения на основе стандартизации и унификации аппаратных и программных средств интеллектуальных бортовых систем управления//Вестник МГТУ МИРЭА . - 2014. - N 1. - с.99-105 |
[5] | Распоряжение Правительства Российской Федерации от 19 августа 2020 г. N 2129-р "Об утверждении Концепции развития регулирования отношений в сфере технологий искусственного интеллекта и робототехники на период до 2024 г." |
[6] | Бычков И.Н., Рябцев Ю.С., Трушкин К.А., Халиуллин Ю.Х. Анализ электронных компонент для доверенного вычислительного оборудования//Вопросы радиоэлектроники, сер. ЭВТ, 2014, вып.3 |
[7] | Белов С.Г., Олейников А.Я., Якименко Е.Е. Вопросы обеспечения интероперабельности в группировках авиационных беспилотных летательных аппаратов в РФ//Информационные технологии и вычислительные системы. 2020, N 4, с.3-14 |
[8] | Башлыкова А.А., Растягаев Д.В. Интероперабельность репозиториев версий инструментального программного обеспечения вычислительных комплексов. Сложные системы: модели, анализ, управление" - М//Вестник Российского нового университета. 2021, с.136-142 |
[9] | Модель систем, возможностей, операций, программ и предприятий (SCOPE) для оценки функциональной совместимости. Версия 1.0. - NCOIC, 2008. - 154 с. |
УДК 004.7:006.354 | ОКС 35.240.50 |
Ключевые слова: роботы, роботехнические комплексы, промышленные робототехнические комплексы, архитектура, уровни интероперабельности, барьеры интероперабельности, профили интероперабельности | |
