ГОСТ Р 55689-2013
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
АУДИОВИЗУАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ (РАВИС)
Нормы и методы метрологического обеспечения
Realtime audiovisual information system (RAVIS). Norms and methods of measurement assurance
ОКС 33.140
Дата введения 2014-09-01
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Научно-производственная фирма "САД-КОМ" (ООО "НПФ "САД-КОМ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 480 "Связь"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 31 октября 2013 г. N 1332-ст
4 ВВЕДЕН ВПЕРВЫЕ
5 ПЕРЕИЗДАНИЕ. Февраль 2020 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт распространяется на оборудование аудиовизуальной информационной системы реального времени РАВИС, предназначенной для цифрового наземного узкополосного вещания по ГОСТ Р 54309-2011 в I и II полосах ОВЧ-диапазона частот (65,8-74,0 МГц и 87,5-108,0 МГц).
Настоящий стандарт устанавливает нормы на основные параметры системы РАВИС и методы их измерения при испытаниях и эксплуатации.
Параметры и методы их измерений, не приведенные в настоящем стандарте, определяются стандартами, техническими условиями, конструкторской и иной технической документацией на соответствующее оборудование.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 12.1.006 Система стандартов безопасности труда. Электромагнитные поля радиочастот. Допустимые уровни на рабочих местах и требования к проведению контроля
ГОСТ 12.3.019 Система стандартов безопасности труда. Испытания и измерения электрические. Общие требования безопасности
ГОСТ 22261-94 Средства измерений электрических и магнитных величин. Общие технические условия
ГОСТ Р 52210-2004 Телевидение вещательное цифровое. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины, определения, обозначения и сокращения
3.1 Термины и определения
В настоящем стандарте применены термины, установленные ГОСТ Р 52210, а также следующие термины с соответствующими определениями:
3.1.1 внеполосные составляющие спектра: Компоненты спектра излучаемого колебания, непосредственно примыкающие к полученной ширине полосы радиочастот, являющейся результатом процесса модуляции.
3.1.2 защитный интервал (Guard Interval): Временнй интервал, вводимый между двумя последовательными OFDM-символами, предназначенный для защиты полезной части сигнала от искажений, связанных с эфирным многолучевым распространением.
3.1.3 интерфейс: Граница между двумя системами или между двумя частями одной системы, определяемая заданием соответствующих характеристик в целях обеспечения совместимости по формату, функциям, сигналам и взаимодействию.
3.1.4 кадр OFDM (OFDM Frame): Совокупность символов OFDM; с начала кадра возможно декодирование передаваемых данных.
3.1.5 кадр данных (Data Frame): Множество из бит, формирующее вход одного процесса канального кодирования (кодирование БЧХ и LDPC).
3.1.6 кодовая скорость: Отношение длины информационной последовательности на входе кодера к длине кодированной последовательности на его выходе.
3.1.7 коэффициент ошибок модуляции (MER): Коэффициент, характеризующий расхождение между идеальной (вычисленной) и реальной позициями векторов в сигнальном созвездии ортогональных кодированных несущих радиосигнала РАВИС и определяемый как отношение мощностей радиосигналов в этих позициях.
3.1.8 непрерывные пилотные несущие: Служебные несущие, размещаемые в пределах ячеек с фиксированными позициями внутри символов и кадров OFDM.
3.1.9 нулевой пакет: Пакет транспортного потока MPEG-2 [1], все байты данных которого установлены в 0x00; то есть нулевой пакет определяется как четырехбайтовая последовательность 0x47, 0x1F, 0xFF и 0x10, за которой следуют 184 нулевых байта (0x00).
3.1.10 пик-фактор сигнала (PAPR, Peak-to-Average Power Ratio): Отношение пиковой амплитуды сигнала к его среднеквадратичному значению.
3.1.11 рассеянные пилотные несущие: Служебные несущие, размещаемые в пределах ячеек с изменяющимися позициями от символа к символу внутри кадра OFDM.
3.1.12 символ OFDM (OFDM Symbol): Сигнал длительностью , включающий в себя все активные несущие, модулированные соответствующими значениями, а также защитный интервал.
3.1.13 синхробайт (Sync Byte): Байт со значением 47 в шестнадцатеричной системе счисления. Используется для определения начала транспортного пакета.
3.1.14 совмещенный канал: Канал, положение центральной несущей которого совпадает с положением центральной несущей рабочего канала.
3.1.15 соседний канал: Канал, положение центральной несущей которого отличается от положения центральной несущей рабочего канала на величину, равную условной ширине рабочего канала (100, 200, 250 кГц). Различают правый и левый соседние каналы.
3.1.16 транспортный пакет MPEG-2 (MPEG-2 Transport Packet): Последовательность из 188 байт, у которой первый байт является синхробайтом.
3.1.17 транспортный поток (Transport Stream): Метод мультиплексирования в один поток и пакетной передачи последовательности транспортных пакетов.
3.1.18 ячейка OFDM (OFDM Cell): Значение, модулирующее одну несущую на интервале одного символа OFDM.
3.1.19 ячейка данных (Data Cell): Ячейка OFDM, не являющаяся пилотной ячейкой или ячейкой ППС.
3.2 Обозначения
В настоящем стандарте применены следующие обозначения:
- ширина полосы частот радиоканала (расстояния между крайними несущими спектра сигнала OFDM);
- центральная частота РЧ-сигнала;
- индекс несущей OFDM;
- индекс несущей относительно центральной частоты;
- число битов некодированного блока кода БЧХ;
- индекс последней активной несущей (с максимальной частотой);
- индекс первой активной несущей (с минимальной частотой);
- число несущих OFDM;
- длительность кадра OFDM;
- длительность защитного интервала;
- общая длительность символа OFDM;
- длительность активного символа OFDM.
3.3 Сокращения
В настоящем стандарте применены следующие сокращения:
16-QAM - 16-позиционная модуляция QAM;
64-QAM - 64-позиционная модуляция QAM;
Al (Amplitude Imbalance) - дисбаланс амплитуды;
BER (Bit Error Rate) - частота появления ошибочных бит;
BPSK (Binary Phase Shift Keying) - двухпозиционная фазовая манипуляция;
CS (Carrier Suppression) - подавление несущей;
DVB-T (Digital Video Broadcasting - Terrestrial) - система наземного цифрового телевизионного вещания;
DVB-T2 (Digital Video Broadcasting - Terrestrial, Second Generation) - система наземного цифрового телевизионного вещания второго поколения;
END (Equivalent Noise Degradation) - эквивалентные шумовые потери;
ENF (Equivalent Noise Floor) - базовый эквивалентный уровень шума;
EVM (Error Vector Magnitude) - величина вектора ошибки;
GPS (Global Positioning System) - система глобального позиционирования;
LDPC (Low Density Parity Check) - коды с малой плотностью проверок на четность;
MER (Modulation Error Ratio) - относительная ошибка модуляции;
MPEG-2 (Motion Picture Experts Group) - группа стандартов цифрового кодирования и мультиплексирования видео- и аудио-сигналов;
OFDM (Orthogonal Frequency-Division Multiplexing) - схема цифровой модуляции - ортогональное частотное мультиплексирование;
PJ (Phase Jitter) - фазовый джиттер;
PPS (Pulse Per Second) - импульс временной синхронизации в одночастотной сети;
QAM (Quadrature Amplitude Modulation) - квадратурно-амплитудная модуляция;
QCIF (Quarter Common Intermediate Format) - размер кадра видео 176x144 пиксела;
QE (Quadrature Error) - квадратурная ошибка;
QEF (Quasi Error Free) - квазибезошибочный;
QPSK (Quadrature Phase Shift Keying) - четырехпозиционная фазовая манипуляция;
SEP (System Error Performance) - показатель системных ошибок;
SFN (Single Frequency Network) - одночастотная сеть;
STE (System Target Error) - систематическая ошибка положения точек созвездия;
STS (Synchronisation Time Stamp) - временная метка синхронизации;
АЧХ - амплитудно-частотная характеристика;
АЦП - аналого-цифровой преобразователь;
БПФ - быстрое преобразование Фурье;
БЧХ - двоичный блоковый код коррекции ошибок Бозе-Чоудури-Хоквингема (ВСН, Bose-Chaudhuri-Hocquenghem Multiple Error Correction Binary Block Code);
ВСС - внеполосные составляющие спектра;
ГВЗ - групповое время задержки;
ДФ - дифференциальная фаза;
ИС - измерительный сигнал;
КД - кадр данных;
КИП - когерентная интерференционная помеха;
НП - нулевой пакет;
НПН - непрерывные пилотные несущие;
ОБПФ - обратное быстрое преобразование Фурье;
ОВЧ - диапазон очень высоких частот (30-300 МГц);
ОСШ (SNR) - отношение сигнал-шум;
ППС (TPS, Transmission Parameter Signaling) - параметры передачи сигнала;
ПСДП (PRBS, Pseudo Random Binary Sequence) - псевдослучайная двоичная последовательность;
РАВИС (RAVIS, Realtime Audiovisual Information System) - аудиовизуальная система реального времени;
РПН - рассеянные пилотные несущие;
РЧ - радиочастота;
СКО - среднеквадратичное отклонение;
ТП (TS, Transport Stream) - транспортный поток;
ЦАП - цифроаналоговый преобразователь.
4 Основные параметры системы РАВИС
4.1 Общие положения
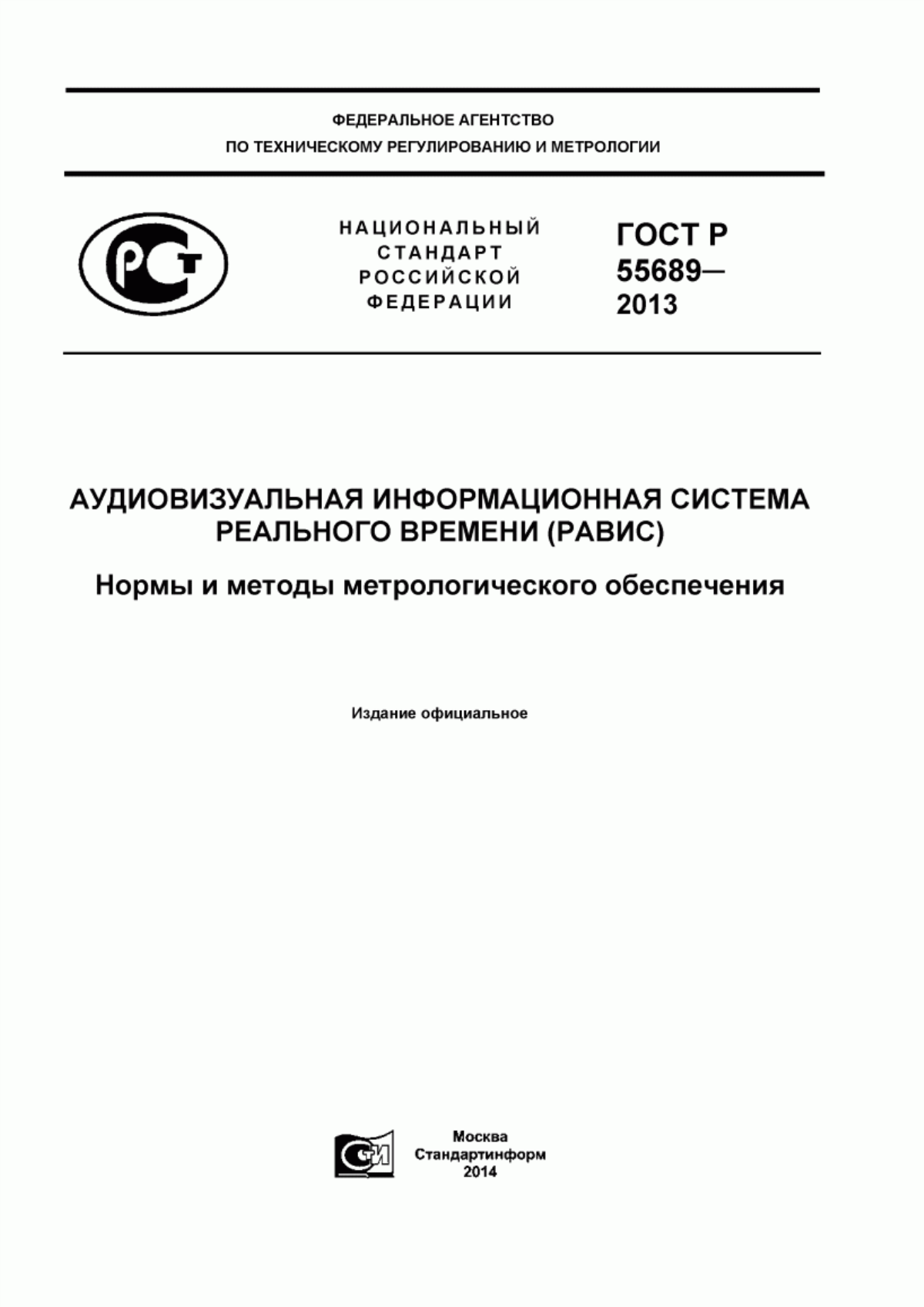
Система РАВИС содержит передающую, приемную части и соединяющий их канал связи (сеть); функциональные схемы передающей и приемной частей с обозначением измерительных интерфейсов приведены на рисунках 1 и 2.
|
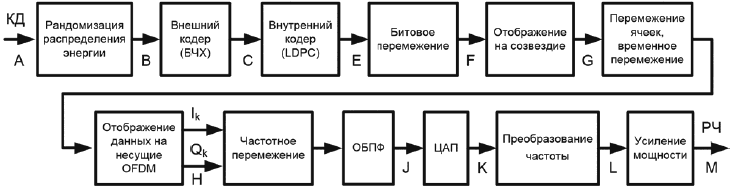
Рисунок 1 - Функциональная схема передающей части системы РАВИС (передатчик)
В передающей части системы РАВИС из КД формируется РЧ-сигнал путем применения последовательности преобразований (в скобках указаны буквенные обозначения измерительных интерфейсов):
- рандомизации энергии (скремблирование) внутри КД (B);
- помехозащитного канального кодирования, включающего внешнее (БЧХ) (C) и внутреннее (LDPC) кодирование (E);
- битового перемежения, изменяющего порядок следования битов внутри КД (F);
- отображения битов КД на точки модуляционного созвездия (G);
- перемежения ячеек данных и перемежения блоков ячеек (временне перемежение) в рамках одного или нескольких КД;
- формирования символов и кадров OFDM: отображения ячеек данных всех каналов на несущие OFDM, перемежения данных несущих, ввода пилотных несущих и несущих ППС с учетом номера символа, коррекции пик-фактора (H);
- формирования сигнала символа OFDM во временнй области с помощью ОБПФ, формирования задержки при использовании разнесенной передачи, ввода защитного интервала (J);
- цифроаналогового преобразования и фильтрации (K);
- переноса на частоту вещания (L);
- усиления по мощности и излучения РЧ-сигнала в сеть (M).
|
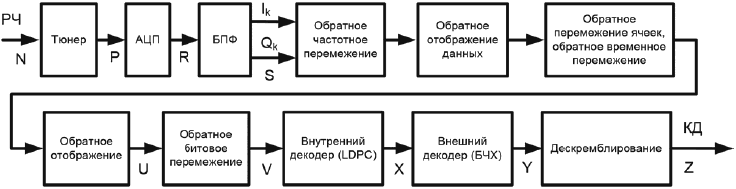
Рисунок 2 - Функциональная схема приемной части системы РАВИС (приемник)
В приемной части системы РАВИС из РЧ-сигнала формируются КД в результате применения следующих преобразований:
- частотной селекции, амплитудной демодуляции и нормализации амплитуды шумоподобного сигнала (P);
- аналогоцифрового преобразования (R);
- БПФ (S);
- обратных преобразований (частотного перемежения, отображения данных, перемежения ячеек, временного перемежения, отображения (U) и битового перемежения) (V);
- помехозащитного канального декодирования, включающего внутреннее (LDPC) (X) и внешнее (БЧХ) декодирование (Y);
- дескремблирования (Z).
В таблице 1 приведены измеряемые параметры системы РАВИС, контролируемые также в системах DVB-T [2] и DVB-T2 [3], с указанием измерительных интерфейсов и пунктов методик метрологического обеспечения.
Таблица 1 - Измеряемые параметры системы РАВИС
Содержание измерений, измерительные интерфейсы | Пункт методики |
1 Измерения в радиочастотном (РЧ) диапазоне: | |
1.1 Точность настройки по РЧ, интерфейс L, M или N | 6.4.1 |
1.2 Ширина канала (расстояние между крайними несущими спектра сигнала) по РЧ, интерфейс L, M или N | 6.4.2 |
1.3 Длительность символа на РЧ, интерфейс L, M или N | 6.4.3 |
2 Спектральные характеристики на РЧ: | 6.4.4 |
2.1 Спектр РЧ и ПЧ, интерфейс L, M | 6.4.4.1 |
2.2 Мощность сигнала РЧ, интерфейс L, M, N | 6.4.4.2 |
2.3 Мощность шума, интерфейс L, M, N | 6.4.4.3 |
3 Чувствительность приемника и динамический диапазон гауссова канала, интерфейс N, (B и X), (B и Y) | 6.4.5 |
4 Избирательность приемника, интерфейс N, X или Y | 6.4.6 |
5 Эквивалентные шумовые потери (END), интерфейс Y, N, Р, S | 6.4.7 |
6 Базовый эквивалентный уровень шума (ENF), интерфейс Y, N, Р, S | 6.4.8 |
7 Характеристика линейности (внеполосных составляющих спектра), интерфейс M | 6.4.9 |
8 Наличие когерентной интерференционной помехи, интерфейс N | 6.4.10 |
9 Зависимость BER при изменении ОСШ, интерфейс (от F до U) или (от E до V) | 6.4.11 |
10 Проверка BER канального декодера: | 6.4.12 |
10.1 BER до внутреннего декодера LDPC, интерфейс V | 6.4.12.1 |
10.2 BER до внешнего декодера БЧХ, интерфейс X | 6.4.12.2 |
10.3 BER после внешнего декодера БЧХ (количество ошибочных бит), интерфейс Y | 6.4.12.3 |
11 Анализ сигналов I и Q: | 6.4.13 |
11.1 Относительная ошибка модуляции (MER) и величина вектора ошибки (EVM), интерфейс L, M | 6.4.13.1 |
11.2 Систематическая ошибка положения точек созвездия (STE), интерфейс L, M | 6.4.13.2 |
11.3 Дисбаланс амплитуды (AI), интерфейс L, M | 6.4.13.3 |
11.4 Квадратурная ошибка (QE), интерфейс L, M | 6.4.13.4 |
11.5 Фазовый джиттер (PJ), интерфейс L, M | 6.4.13.5 |
11.6 Подавление несущей (CS), интерфейс L, M | 6.4.13.6 |
12 Неравномерность АЧХ и ГВЗ, интерфейс L, M, N | 6.4.14 |
5 Технические требования
5.1 Общие требования
5.1.1 Оборудование системы РАВИС должно соответствовать требованиям настоящего стандарта и эксплуатироваться в соответствии с конструкторской документацией на систему РАВИС и ПТЭ-2002.
5.1.2 Оборудование системы РАВИС должно обеспечивать непрерывную работу в течение 24 ч с сохранением параметров, указанных в разделе 5.2.
5.1.3 Оборудование системы РАВИС должно обеспечивать:
- работу без постоянного присутствия обслуживающего персонала;
- резервирование отдельных узлов;
- автоматический переход на резервное оборудование;
- возможность дистанционного управления и контроля параметров.
5.2 Технические требования к основным параметрам системы РАВИС
5.2.1 Точность настройки центральной частоты по РЧ
Допустимое отклонение центральной частоты сигнала РАВИС от номинального значения в течение одного месяца должно быть не более ±100 Гц.
Допустимое отклонение центральной частоты сигнала РАВИС от номинального значения при наличии внешней синхронизации должно быть не более ±10 Гц.
5.2.2 Ширина канала по РЧ
Отличие ширины канала по РЧ от номинального значения должно быть не более ±1 Гц.
5.2.3 Длительность символа на РЧ (проверка защитного интервала)
Отличие длительности символа на РЧ от номинального значения должно быть не более ±1 мкс.
5.2.4 Форма спектра сигнала на РЧ
Спектр мощности сигнала РАВИС для каждого номинального значения ширины полосы должен укладываться в соответствующую спектральную маску. Спектральные маски для условных значений ширины полосы частот 100, 200 и 250 кГц приведены в приложении А.
5.2.5 Чувствительность приемника
Чувствительность приемника должна быть не менее минус 102 дБм, BER в динамическом диапазоне от 10 до минус 102 дБм - не более 10, MER - не менее 11 дБ для гауссова канала.
5.2.6 Избирательность приемника и уровень блокировки
Избирательность приемника по соседнему каналу должна быть не менее минус 10 дБ.
Избирательность приемника по совмещенному каналу - не менее 11 дБ.
Уровень блокировки приемника - не менее минус 30 дБ.
5.2.7 Эквивалентные шумовые потери (END) должны быть не более 0,5 дБ.
5.2.8 Базовый эквивалентный уровень шума (ENF) должен быть не более 0,7 дБ.
5.2.9 Характеристика линейности (уровень внеполосных составляющих спектра) должен быть не менее минус 75 дБ.
5.2.10 Уровень когерентной интерференционной помехи должен быть не менее минус 66 дБ.
5.2.11 3ависимость BER от ОСШ
Максимальное отклонение ОСШ от графиков зависимости BER от ОСШ, приведенных в приложении Б, при фиксированных значениях BER 10и 10
не должно превышать 0,5 дБ.
5.2.12 Анализ сигналов I и Q системы РАВИС
Параметры сигналов I и Q измерять по сигналу системы РАВИС с условной полосой 250 кГц и модуляцией QPSK.
5.2.12.1 Относительная ошибка модуляции (MER), величина вектора ошибки (EVM)
Значение параметра MER сигнала РАВИС должно быть не менее 42 дБ на интерфейсе L и не менее 36 дБ на интерфейсе M.
Значение параметра EVM должно быть не более 0,8% на интерфейсе L и не более 1,5% на интерфейсе M.
5.2.12.2 Систематическая ошибка положения точек созвездия (STE)
Значение параметра STE сигнала РАВИС должно быть не более 0,25% на интерфейсе L и не более 0,5% на интерфейсе M.
5.2.12.3 Дисбаланс амплитуды (AI)
Значение параметра AI сигнала РАВИС должно быть не более 0,025% на интерфейсе L и не более 0,05% на интерфейсе M.
5.2.12.4 Квадратурная ошибка (QE)
Значение параметра QE сигнала РАВИС должно быть не более 0,025° на интерфейсе L и не более 0,05° на интерфейсе M.
5.2.12.5 Фазовый джиттер (PJ)
Значение параметра PJ сигнала РАВИС должно быть не более 0,05° на интерфейсе L и не более 0,1° на интерфейсе M.
5.2.12.6 Подавление несущей (CS)
Значение параметра CS сигнала РАВИС должно быть не менее 66 дБ на интерфейсе L и не менее 60 дБ на интерфейсе M.
5.2.13 Неравномерность АЧХ и ГВЗ
Неравномерность АЧХ для условной ширины полосы ![]() 100; 200; 250 кГц сигнала РАВИС должна быть не более ±0,5 дБ на интерфейсе L и не более ±2,5 дБ на интерфейсе M.
100; 200; 250 кГц сигнала РАВИС должна быть не более ±0,5 дБ на интерфейсе L и не более ±2,5 дБ на интерфейсе M.
Неравномерность ГВЗ для условной ширины полосы ![]() 100; 200; 250 кГц сигнала РАВИС должна быть не более ±5 нс на интерфейсе L и не более ±10 нс на интерфейсе M.
100; 200; 250 кГц сигнала РАВИС должна быть не более ±5 нс на интерфейсе L и не более ±10 нс на интерфейсе M.
5.3 Требования безопасности
5.3.1 Средства измерений, рабочие места и средства защиты персонала при техническом обслуживании системы РАВИС должны соответствовать требованиям ГОСТ 12.3.019.
5.3.2 Предельно допустимые значения напряженности поля (плотности потока энергии излучения электромагнитного поля) на рабочих местах обслуживающего персонала должны соответствовать требованиям ГОСТ 12.1.006.
5.4 Требования устойчивости к климатическим и механическим воздействиям
5.4.1 Параметры оборудования системы РАВИС должны сохранять свои значения, указанные в разделах 5 и 6.2, при следующих климатических условиях внешней среды:
- температура воздуха в помещении от 10°С до 25°С;
- относительная влажность 80% при температуре 20°С.
5.4.2 При хранении и транспортировании оборудование системы РАВИС в упакованном виде должно соответствовать требованиям устойчивости к климатическим и механическим воздействиям по ГОСТ 22261 для оборудования 2-й группы.
5.4.3 Контрольно-измерительная аппаратура должна соответствовать требованиям устойчивости к климатическим и механическим воздействиям, приведенным в эксплуатационной документации на эту аппаратуру.
6 Методы измерений и испытаний
6.1 Общие положения
6.1.1 Параметры работы оборудования системы РАВИС, если условия измерений не оговорены особо, измеряются в нормальных климатических условиях:
- температура воздуха от (20±5)°C;
- относительная влажность воздуха от 30% до 80% при температуре 20°C;
- атмосферное давление от 86 до 106 кПа.
При питании оборудования системы РАВИС от сети переменного тока напряжение должно составлять (220±4,4) В при частоте (50±0,5) Гц и содержании гармоник не более 5%.
6.1.2 Оборудование системы РАВИС, средства измерений и вспомогательное оборудование должны быть подготовлены к работе в соответствии с технической документацией.
Измерение параметров проводят не ранее чем через 30 минут после включения оборудования системы РАВИС, средств измерений и вспомогательного оборудования.
6.1.3 Средства измерений должны быть исправны, поверены и иметь свидетельство о поверке. Все средства измерений должны иметь сертификат Российской Федерации и должны быть внесены в Государственный реестр средств измерений.
6.2 Требования к средствам измерений
Типовой комплект измерительного оборудования для компонентов системы РАВИС может включать в себя следующие приборы:
- анализатор спектра;
- генератор опорной частоты;
- комплекс измерительный телевизионный КИ-ТВМ-РАВИС;
- аттенюатор СВЧ-сигнала (два комплекта).
Комплект программного обеспечения для измерений оборудования системы РАВИС может строиться на основе:
- пакета визуального программирования VEE Pro фирмы Agilent;
- пакета математического программного комплекса MathCAD фирмы PTC.
6.2.1 Анализатор спектра
Требования к прибору:
- диапазон частот от 9 кГц до 26,5 ГГц;
- чувствительность анализатора минус 135 дБм;
- диапазон полос пропускания 1-8 МГц;
- диапазон измерения амплитуд от 30 до минус 135 дБм.
6.2.2 Генератор опорной частоты
Требования к прибору:
- диапазон частот 10-200 МГц;
- точность установки частоты ±0,01 Гц;
- точность установки уровня ±0,1 дБ.
6.2.3 Комплекс измерительный телевизионный КИ-ТВМ-РАВИС
Требования к комплексу:
- должна быть инсталлирована опция "Анализатор сигнала РАВИС".
6.2.4 Аттенюатор СВЧ-сигнала (два комплекта)
Требования к прибору:
- диапазон частот 20-6000 МГц;
- регулировка затухания в диапазоне от 0,5 до 63 дБ;
- дискретность вносимого затухания 0,5 дБ.
6.2.5 Пакет визуального программирования Agilent VEE Pro
Требования к программному пакету - версия 9.2 Pro или выше.
6.2.6 Пакет математического программного комплекса PTC MathCAD
Требования к программному пакету - версия 14.0 (M020 или M035).
6.3 Проверка соответствия общим требованиям
6.3.1 Проверка соответствия оборудования системы РАВИС общим требованиям осуществляется по технической документации, сопровождающей конкретное оборудование системы РАВИС.
6.3.2 Проверку оборудования системы РАВИС на соответствие требованиям 5.1.2 проводят с помощью испытания на непрерывную работу в течение 24 ч. В процессе непрерывной работы системы РАВИС в течение 24 ч основные параметры должны соответствовать требованиям раздела 6.2 настоящего стандарта.
6.4 Измерения основных параметров системы РАВИС
В этом документе считается, что приемник РАВИС входит в состав измерительной системы РАВИС, даже если он не показан на схемах этого раздела и не упоминается в объяснениях. В этом случае все интерфейсы приемника РАВИС (см. рисунок 2) являются внутренними интерфейсами, к которым измерительная система имеет доступ.
В приложении В приведены примеры измерений по РЧ с помощью анализатора спектра.
6.4.1 Проверка точности настройки по РЧ
Измерительный интерфейс: L, M или N. В интерфейсах L или M сигнал не должен превышать максимально допустимый уровень на входе анализатора спектра.
Измерительный сигнал: "ИС " - синусоидальный сигнал
с частотой, равной центральной частоте спектра.
Метод: Измерение и калибровку анализатора спектра проводить в соответствии со структурной схемой, приведенной на рисунке 3. Используется пассивный сумматор-тройник, образованный резисторами 50/3 Ом ±0,5%.
В передающей части системы РАВИС сформировать синусоидальный сигнал с частотой, равной центральной частоте спектра. В генераторе опорной частоты сформировать синусоидальный сигнал
![]() с частотой, на 20 Гц превышающей центральную частоту спектра
с частотой, на 20 Гц превышающей центральную частоту спектра .
|
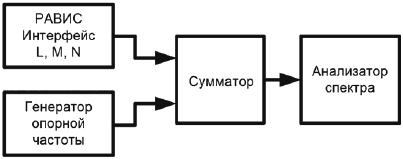
Рисунок 3 - Схема измерения точности настройки по РЧ
В анализаторе спектра (например, с помощью программного комплекса Agilent VEE Pro) измерить эти частоты.
Разность измеренного ![]() и номинального значений частоты сигнала
и номинального значений частоты сигнала ![]() использовать для коррекции значения измеренной частоты по формуле
использовать для коррекции значения измеренной частоты по формуле
![]() .
.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное отклонение центральной частоты от номинального значения не более ±10 Гц.
6.4.2 Проверка ширины канала (расстояния между крайними несущими спектра сигнала) по РЧ
Измерительный интерфейс: L, M или N.
Измерительный сигнал: "ИС ![]() " - два синусоидальных сигнала с частотами, равными частотам крайних несущих сигнала РАВИС с индексами в спектре относительно центральной несущей
" - два синусоидальных сигнала с частотами, равными частотам крайних несущих сигнала РАВИС с индексами в спектре относительно центральной несущей ±107, ±219, ±276 (
![]() ,
,![]() ,
,![]() ) для канала с условной шириной полосы 100, 200 и 250 кГц соответственно).
) для канала с условной шириной полосы 100, 200 и 250 кГц соответственно).
Метод: Ширина полосы частот канала COFDM зависит от частоты дискретизации. Крайние несущие в сигнале РАВИС - повторяющиеся пилотные несущие (ППН). Измеряя частоты крайних несущих ППН и
, получим измеренную ширину полосы частот канала по формуле
![]() .
.
Измерение и калибровку анализатора спектра в условной полосе 100, 200 и 250 кГц проводить по структурной схеме, приведенной на рисунке 3.
6.4.2.1 Измерение ППН с минимальной частотой
В передающей части системы РАВИС сформировать непрерывный синусоидальный сигнал ![]() , соответствующий несущей с минимальным индексом (-276, -219, -107 для каналов с условной полосой 250, 200, 100 кГц соответственно). В генераторе опорной частоты сформировать непрерывный синусоидальный сигнал
, соответствующий несущей с минимальным индексом (-276, -219, -107 для каналов с условной полосой 250, 200, 100 кГц соответственно). В генераторе опорной частоты сформировать непрерывный синусоидальный сигнал ![]() с частотой на 20 Гц ниже частоты несущей с минимальным индексом. В анализаторе спектра измерить эти частоты. Разность измеренного и номинального значений частоты сигнала
с частотой на 20 Гц ниже частоты несущей с минимальным индексом. В анализаторе спектра измерить эти частоты. Разность измеренного и номинального значений частоты сигнала ![]() использовать для коррекции абсолютной погрешности измерения частоты, как это показано в 6.4.1.
использовать для коррекции абсолютной погрешности измерения частоты, как это показано в 6.4.1.
6.4.2.2 Измерение НПН с максимальной частотой
В передающей части системы РАВИС сформировать непрерывный синусоидальный сигнал ![]() , соответствующий несущей с максимальным индексом (+276, +219, +107 для каналов с условной полосой 250, 200, 100 кГц соответственно). В генераторе опорной частоты сформировать непрерывный синусоидальный сигнал
, соответствующий несущей с максимальным индексом (+276, +219, +107 для каналов с условной полосой 250, 200, 100 кГц соответственно). В генераторе опорной частоты сформировать непрерывный синусоидальный сигнал ![]() с частотой на 20 Гц ниже несущей с максимальным индексом. В анализаторе спектра измерить эти частоты. Разность измеренного и номинального значений частоты сигнала
с частотой на 20 Гц ниже несущей с максимальным индексом. В анализаторе спектра измерить эти частоты. Разность измеренного и номинального значений частоты сигнала ![]() использовать для коррекции абсолютной погрешности измерения частоты, как это показано в 6.4.1.
использовать для коррекции абсолютной погрешности измерения частоты, как это показано в 6.4.1.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное отличие ширины канала по РЧ от номинального значения не более ±1 Гц.
В таблице 2 приведены параметры сигналов РАВИС, которые вычисляются на основе измеренных значений ширины полосы частот.
6.4.3 Проверка длительности символа на РЧ
Измерительный интерфейс: L, M или N.
Измерительный сигнал: "ИС РПН", содержащий только рассеянные пилотные несущие сигнала РАВИС.
Метод: Каждая рассеянная пилотная несущая формирует спектральные линии, отстоящие друг от друга на пятую часть частоты следования символов РАВИС, поскольку они повторяются с одной и той же фазой и положением в каждом пятом символе. Разность частот ![]() между двумя последовательными спектральными линиями, относящимися к РПН, соответствует обратной величине длительности пяти последовательных символов РАВИС, а разность частот между спектральными линиями
между двумя последовательными спектральными линиями, относящимися к РПН, соответствует обратной величине длительности пяти последовательных символов РАВИС, а разность частот между спектральными линиями ![]() соответствует обратной величине длительности символа РАВИС.
соответствует обратной величине длительности символа РАВИС.
Длительность защитного интервала определяется по формуле
![]() ,
,
где вычисленное значение приведено в таблице 2.
Для измерения длительности символа в генераторе РАВИС сформировать "ИС РПН".
В анализаторе спектра измерить разность частот между спектральными линиями ![]() и вычислить длительность символа РАВИС по формуле
и вычислить длительность символа РАВИС по формуле
![]() .
.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное отличие длительности символа на РЧ от номинального значения не более ±1 мкс.
Таблица 2 - Параметры сигнала РАВИС
Параметр | Значение номинальное | ||
Ширина полосы частот условная, кГц | 250 | 200 | 100 |
Ширина полосы частот номинальная, кГц | 245,3 | 194,7 | 95,1 |
Ширина полосы частот измеренная, кГц |
| ||
Частотный интервал номинальный, Гц | 444,444 | ||
Частотный интервал измеренный, Гц |
| ||
Эффективная длительность номинальная, мкс | 2250 | ||
Эффективная длительность измеренная, мкс |
| ||
6.4.4 Проверка спектральных характеристик на РЧ
6.4.4.1 Спектр РЧ
Измерительный интерфейс: L, M (при использовании интерфейса M измерения проводятся на выходе направленного ответвителя передатчика).
Измерительный сигнал: "ИС ПСДП" - сигнал РАВИС, содержащий только логический канал КОС и КД, содержащие псевдослучайные данные.
Проверку анализатора спектра следует проводить в соответствии со структурной схемой, приведенной на рисунке 3.
Для определения спектра сигнала на РЧ производится измерение мощности сигнала РАВИС в различных частях спектра по отношению к центральной частоте - внутри полосы частот и вне ее - в расширенных полосах частот, захватывающих интервалы нарастания и спада спектра частот сигнала:
215,333; 225,333; 235,333; 245,333; 255,333; 265,333; 275,333; 285,333; 295,333; 305,333; 315,333; 325,333 и 335,333 кГц - для условной полосы 250 кГц;
170,7; 178,7; 186,7; 194,7; 202,7; 210,7; 218,7; 226,7; 234,7; 242,7; 250,7; 258,7; 266,7 кГц - для условной полосы 200 кГц;
83,1; 87,1; 91,1; 95,1; 99,1; 103,1; 107,1; 111,1; 115,1; 119,1; 123,1; 127,1; 131,1 кГц - для условной полосы 100 кГц.
По измеренным данным строятся графики спектров.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренный спектр укладывается в соответствующую маску огибающей внеполосных радиоколебаний (см. приложение А).
6.4.4.2 Проверка мощности сигнала РЧ
Измерительный интерфейс: L, M, N (при использовании интерфейса M измерения проводятся на выходе направленного ответвителя передатчика).
Измерительный сигнал: "ИС ПСДП" - сигнал РАВИС, содержащий только логический канал КОС и КД, содержащие псевдослучайные данные.
Проверку анализатора спектра следует проводить в соответствии со структурной схемой, приведенной на рисунке 3.
Неиспользуемый вход сумматора заглушить нагрузкой 50 Ом.
Измерение мощности сигнала РАВИС и собственного шума анализатора спектра проводится в номинальной полосе канала (см. таблицу 2).
Измерить мощность шума при выключенном сигнале РАВИС.
Включить сигнал РАВИС и измерить его мощность.
Мощность сигнала РАВИС равна разности измеренной мощности сигнала РАВИС и мощности шума, переведенных в шкалу Вт.
Система РАВИС считается выдержавшей испытания по данному параметру, если отличие измеренного значения мощности сигнала от номинального значения не более допуска на параметр "мощность сигнала передатчика" в соответствии с руководством по эксплуатации передатчика.
6.4.4.3 Проверка мощности шума
Измерительный интерфейс: L, M, N (при использовании интерфейса M измерения проводятся на выходе направленного ответвителя передатчика).
Измерительный сигнал: "ИС ПСДП".
Метод: Мощность шума (средняя мощность) или нежелательная мощность может измеряться анализатором спектра при отключении сервиса. Мощность шума измеряется в номинальной полосе частот, занимаемой сигналом РАВИС (см. таблицу 2).
Измерить мощность собственного шума анализатора спектра (все сигналы отключены, входы сумматора заглушены нагрузками 50 Ом).
Присоединить кабель цифрового модулятора РАВИС и измерить мощность шума при выключенном сигнале РАВИС.
Мощность шума цифрового модулятора РАВИС равна разности измеренной мощности шума при выключенном сигнале РАВИС и мощности собственного шума анализатора спектра.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение мощности шума не более мощности шума передатчика в соответствии с руководством по эксплуатации передатчика.
6.4.5 Проверка чувствительности приемника и динамического диапазона гауссова канала
Цель: Определение минимальной и максимальной входной мощности, необходимой для нормальной работы приемника.
Измерительный интерфейс: ИС подается на интерфейс N и измеряется на этом интерфейсе; BER измеряется между интерфейсами (B и X), (B и Y).
Измерительный сигнал: "ИС ПСДП".
Метод: Для квазибезошибочного функционирования между минимальным и максимальным значениями входной мощности сигнала должно выполняться условие: ![]() 10
10 до декодера LDPC. Разность между измеренными значениями минимального и максимального порогов входной мощности сигнала составляет динамический диапазон гауссова канала.
Измерение чувствительности приемника должно выполняться по структурной схеме, приведенной на рисунке 4.
|
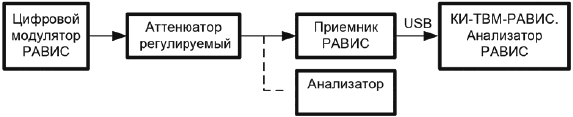
Рисунок 4 - Схема измерения чувствительности и динамического диапазона
В цифровом модуляторе РАВИС задать:
1) скорость канального кодирования 3/4, модуляцию несущих QPSK, требуемую полосу сигнала;
2) при измерениях сигнала с наибольшим уровнем - уровень сигнала на выходе аттенюатора равным максимальному уровню, предусмотренному паспортом приемника;
3) при измерениях сигнала с наименьшим уровнем - уровень сигнала на выходе аттенюатора равным минус 102 дБм.
В анализаторе спектра задать:
1) центральную частоту равной центральной частоте несущей сигнала с цифрового модулятора РАВИС;
2) режим усреднения с накоплением;
3) подавление сигнала входа 0 дБм;
4) режим измерения мощности в полосе;
5) соответствующую ширину полосы измерения мощности по таблице 2.
Измерение MER и BER производить с помощью комплекса КИ-ТВМ-РАВИС или встроенными средствами приемника. В течение процесса измерения приемник должен оставаться синхронизирован.
Уровень входного сигнала измеряется анализатором спектра. Измерения должны быть выполнены для всех применяемых типов электропитания.
Произвести измерение по наибольшему уровню РЧ-сигнала, убедиться в том, что приемник обеспечивает требуемое качество приема.
6.4.5.1 Произвести измерение чувствительности по наименьшему уровню РЧ-сигнала, при котором приемник обеспечивает требуемое качество приема. При этом должен осуществляться прием сигнала с качеством QCIF в режиме модуляции QPSK.
6.4.5.2 Динамический диапазон определить как разность между наибольшим уровнем принимаемого сигнала и уровнем чувствительности приемника в дБм, измеренным в 6.4.5.1.
Система РАВИС считается выдержавшей испытания по данному параметру, если BER в динамическом диапазоне от 10 до минус 102 дБм не более 10, MER - не менее 11 дБ для гауссова канала, чувствительность приемника - не менее минус 102 дБм.
6.4.6 Проверка избирательности приемника
Измерительный интерфейс: ИС подается на интерфейс N и измеряется на этом интерфейсе; BER измеряется между интерфейсами (B и X), (B и Y).
Измерительный сигнал: "ИС ПСДП".
6.4.6.1 Измерение избирательности по соседнему каналу должно выполняться по структурной схеме, приведенной на рисунке 5.
|
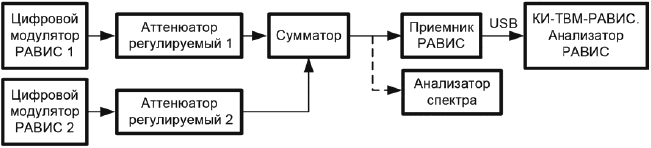
Рисунок 5 - Схема измерения избирательности по соседнему каналу и уровня блокировки
Установить соответствующие полосы полезного и мешающего сигналов РАВИС. Разнос центральных частот между сигналами должен быть равен значению условной ширины полосы канала. Измерения провести для правого и левого соседних каналов. Отрегулировать уровень полезного сигнала от цифрового модулятора РАВИС 1 на входе приемника с помощью аттенюатора регулируемого 1 на 10 дБ выше уровня чувствительности приемника при выключенном цифровом модуляторе РАВИС 2.
Измерение BER производить с помощью комплекса КИ-ТВМ-РАВИС. После включения цифрового модулятора РАВИС 2 увеличивать уровень мешающего сигнала до тех пор, пока BER не возрастет до значения 10. Измерить анализатором спектра уровни полезного и мешающего сигналов от цифрового модулятора РАВИС 1 и цифрового модулятора РАВИС 2 по отдельности.
Избирательность по соседнему каналу определить как разность уровней мешающего и полезного сигналов в дБ.
6.4.6.2 Измерение уровня блокировки приемника должно выполняться по схеме, приведенной на рисунке 5. Значение центральной частоты мешающего сигнала должно отличаться как в большую, так и в меньшую сторону от центральной частоты полезного сигнала на величину , соответствующую диапазону частот и ширине полосы сигнала РАВИС по таблице 3.
Таблица 3 - Сдвиг частоты мешающего сигнала
Диапазон, МГц | Для ширины полосы сигнала РАВИС, кГц | ||
250 | 200 | 100 | |
65,8-74,0 |
|
|
|
87,5-108,0 | |
|
|
Отрегулировать уровень полезного сигнала от цифрового модулятора РАВИС 1 на входе приемника с помощью аттенюатора регулируемого 1 на 3 дБ выше уровня чувствительности при выключенном цифровом модуляторе РАВИС 2. Включить цифровой модулятор РАВИС 2. Увеличивать уровень мешающего сигнала до тех пор, пока MER не достигнет значения 12 дБ. Измерить уровни полезного и мешающего сигналов от цифровых модуляторов РАВИС 1 и 2 по отдельности. Произвести измерения для мешающего сигнала с большей и меньшей частотой. Определить уровень блокировки как разность уровней полученного мешающего и полезного сигналов в дБ. Выбрать меньший из двух получившихся уровней блокировки.
Примечание - Уровень блокировки приемника - это максимальный уровень помехи в полосе приема или вне ее, который может быть получен на фоне малого полезного сигнала без потери чувствительности. Блокировка определяется уровнем помехи, а следствием блокировки будут являться гармоники и шумы. Вероятность блокировки приемника тем меньше, чем больше частотное разделение сигналов различных радиосистем.
6.4.6.3 Измерение избирательности по совмещенному каналу должно выполняться по схеме, приведенной на рисунке 5.
Установить разнос частот 100 Гц между центральными частотами полезного и мешающего сигналов РАВИС. Отрегулировать уровень полезного сигнала от цифрового модулятора РАВИС 1 на входе приемника с помощью аттенюатора регулируемого 1 на 20 дБ выше уровня чувствительности при выключенном цифровом модуляторе РАВИС 2. Включить цифровой модулятор РАВИС 2. Увеличивать уровень мешающего сигнала до тех пор, пока BER не достигнет значения 10. Измерить уровни полезного и мешающего сигналов по отдельности.
Определить избирательность по совмещенному каналу как разность уровней мешающего и полезного сигналов в дБ.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если измеренная избирательность по соседнему каналу не менее минус 10 дБ, измеренный уровень блокировки приемника не менее минус 30 дБ, измеренная избирательность по совмещенному каналу не менее 11 дБ.
6.4.7 Проверка эквивалентных шумовых потерь (END)
Цель: END - мера реальных энергетических потерь, возникающих в цифровом модуляторе, передатчике, сети или оконечном оборудовании, по сравнению с идеальным качеством.
Потери могут быть вызваны:
- нелинейностью амплитудной характеристики, влиянием ДФ, неравномерностью сквозной АЧХ, шумовых и дискретных спектральных составляющих при излучении гармонического колебания, а также неравномерностью ГВЗ;
- величиной допустимого отклонения частоты;
- отношением пиковой выходной мощности к ее среднему значению.
Интерфейс: Y для измерения BER; N, P или S для введения шума.
Измерительный сигнал: "ИС ПСДП".
Метод: Значение END определяется по формуле
![]() , дБ,
, дБ,
где ![]() - ОСШ, необходимое для получения BER, равной 2x10
- ОСШ, необходимое для получения BER, равной 2x10 до внешнего декодера LDPC,
![]() - ОСШ, которое для гауссовского канала теоретически соответствует BER, равной 2x10
- ОСШ, которое для гауссовского канала теоретически соответствует BER, равной 2x10 (см. приложение А [4]).
При измерении этого параметра определяется пороговая величина ОСШ на входе приемника для искаженного шумом сигнала и пороговая величина ОСШ неискаженного шумом сигнала. Разность этих величин в дБ называется END.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если измеренное значение END не более 0,5 дБ.
6.4.8 Проверка базового эквивалентного уровня шума (ENF)
Цель: ENF - мера реальных потерь, возникающих в передающем оборудовании по сравнению с идеальным передатчиком.
Измерительный интерфейс: L - для измерения мощности шума, Y - для измерения BER; N или S - для введения шума.
Измерительный сигнал: "ИС ПСДП".
Метод: ENF получают при измерении дополнительного шума, требуемого для получения BER после внешнего декодера БЧХ, равного 2x10, и уровня шума, при котором теоретическое значение
![]() 2x10
2x10 для гауссова канала (см. приложение А [4]), в соответствии с тем, как описано в приложении В12 [2].
Приемник РАВИС считается выдержавшим испытания по данному параметру, если измеренное значение ENF не более 0,7 дБ.
Замечания по параметрам END и ENF:
Влияние передатчика РАВИС на общую производительность системы, когда сигнал РАВИС принимается приемником через гауссов канал, определяется с помощью измерения END.
Приемник в настоящем документе определен как приемник РАВИС, поэтому требуется, чтобы значения ОСШ были на 3,0 дБ выше, чем значения ОСШ, указанные в [4] для гауссова канала.
END в настоящем документе определяется как разность между ОСШ, при котором ![]() 2x10
2x10 после внешнего декодера БЧХ в приемнике РАВИС, с использованием реального и идеального передатчиков РАВИС.
END представляет собой не только характеристику самого передатчика, но и зависит от используемой полосы частот и от реальных потерь в приемнике (именно поэтому определены фиксированные реальные потери в приемнике, равные 3,0 дБ).
END не должен превышать 0,5 дБ и не должен зависеть от выбранного защитного интервала. В зависимости от требований оператора сети типичные значения END попадают в диапазон 0,1-0,4 дБ.
Для определения значения END может использоваться другой параметр - ENF. Это должно привести к повышению точности при определении END, как описано в приложении В.12 [2].
В противоположность END величина ENF относительно независима от используемого режима РАВИС и от реальных потерь в приемнике и, следовательно, может использоваться для характеристики собственно передатчика. В зависимости от того, требуется ли характеристика собственно передатчика РАВИС или требуется характеристика его влияния на приемник, ENF иногда может использоваться в качестве параметра производительности как альтернатива END.
Считается, что в параметре производительности END в реальных случаях должны преобладать влияния интермодуляции и пульсации амплитуды (отклик ГВЗ передатчика должен быть определен операторами сети в зависимости от используемой конфигурации: канальные коммутаторы, выходные фильтры и т.д.).
6.4.9 Проверка характеристики линейности (внеполосных составляющих спектра)
Цель: Измерение ВСС сигнала РАВИС используется для определения линейности системы формирования и передачи сигнала OFDM.
Измерительный интерфейс: М.
Измерительный сигнал: "ИС ПСДП".
Метод: В измеряемом спектре РЧ-сигнала на выходе передатчика:
1) определяют предельное значение спектра в полосе, ширина которой приблизительно в 10 раз превышает величину расширения спектра несущей;
2) устанавливают вертикальные маркеры в точках измерений, отстоящих на 300 кГц и 700 кГц от каждой верхней и нижней границ спектра, рисуют дополнительные линии, параллельные им, так, чтобы они проходили через наибольшее значение спектра в соответствующем диапазоне;
3) вычитают значение мощности в центре линии (500 кГц от верхней и нижней границы) из максимального значения спектра, полученного в пункте 1), и определяют разность как ВСС на верхней и ВСС на нижней границе.
В качестве значения ВСС из пункта 3) берется наихудшее значение ВСС.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если уровень внеполосных составляющих спектра не менее минус 75 дБ.
6.4.10 Проверка наличия непрерывной когерентной интерференционной помехи
Измерительный интерфейс: N.
Измерительный сигнал: "ИС ПСДП".
Метод: Измерения выполняются с помощью анализатора спектра. Полоса сканирования последовательно уменьшается таким образом, чтобы отображаемый уровень модулированных несущих уменьшался (эти несущие не являются непрерывными вследствие добавления защитного интервала). Непрерывная когерентная интерференционная помеха не подвержена влиянию этого процесса и при достаточно высоком частотном разрешении окажется видна на фоне спектра несущих сигнала РАВИС. При этом появится возможность определить ее параметры - частоту и мощность.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если уровень внеполосных составляющих спектра не менее минус 66 дБ.
6.4.11 Проверка зависимости BER при изменении ОСШ
6.4.11.1 Проверка зависимости BER от ОСШ при изменении мощности гауссова шума на входе приемника
Цель: Оценить характеристику BER приемника при условии, что ОСШ изменяется при изменении добавляемой мощности гауссова шума. Это измерение может использоваться для сравнения эффективности приемника с теоретической или с другими приемниками. Например, для оценки влияния собственных шумов приемника.
Измерительный интерфейс: От F до U или от Е до V.
Измерительный сигнал: "ИС ПСДП".
Метод: "ИС ПСДП" подается на интерфейс F (или E). Различные значения ОСШ устанавливаются путем подачи гауссова шума на вход приемника, и BER измеряется в точке V (или U) с использованием комплекса КИ-ТВМ-РАВИС в режиме измерения уровня BER.
Передатчик должен иметь возможность генерировать PRBS 2-1, как это определено Рекомендацией [5].
При измерениях мощности несущей и шума ширина спектра системы определяется как ![]() .
.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если максимальное отклонение измеренного ОСШ от графика зависимости BER от ОСШ, приведенного в приложении Б, при фиксированных значениях BER 10 и 10
не превышает 0,5 дБ.
6.4.11.2 Проверка зависимости BER от ОСШ при изменении мощности передатчика
Цель: Оценить характеристику BER передатчика при изменении ОСШ для различных значений средней выходной передаваемой мощности. Измерение может использоваться для сравнения эффективности передатчика с теоретической эффективностью или с эффективностью других передатчиков.
Измерительный интерфейс: От F до U или от E до V.
Измерительный сигнал: "ИС ПСДП".
Метод: "ИС ПСДП" подается на интерфейс F (или E). Различные значения ОСШ устанавливаются путем добавления гауссова шума на входе приемника. BER измеряется на интерфейсе V (или U) с использованием комплекса КИ-ТВМ-РАВИС в режиме измерения уровня BER. Измерение повторяется для различных значений средней выходной передаваемой мощности.
Если в передающее оборудование в целях тестирования включена возможность порождения ПСДП в интерфейсе F (или E), то должна применяться PRBS 2-1, как это определено Рекомендацией [5].
При измерениях мощности несущей и шума ширина спектра системы определяется как ![]() .
.
Передатчик РАВИС считается выдержавшим испытания по данному параметру, если максимальное отклонение измеренного ОСШ от графика зависимости BER от ОСШ, приведенного в приложении Б, при фиксированных значениях BER 10 и 10
не превышает 0,5 дБ.
Примечание - потери мощности передатчика определяются как отношение номинальной импульсной пиковой мощности передатчика к средней мощности сигнала. Номинальная импульсная пиковая мощность обычно эквивалентна пиковой мощности синхроимпульсов РЧ-сигнала стандартов B, D, G, H, I или K.
6.4.12 Проверка BER канального декодера
6.4.12.1 Проверка BER до внутреннего декодера LDPC
Цель: С помощью этого измерения (без отключения основного потока) определяется общая производительность передатчика, канала и приемника в пересчете на незакодированный сигнал.
Измерительный интерфейс: V.
Измерительный сигнал: "ИС ПСДП".
Метод: После внутреннего декодера сигнал повторно кодируется в комплексе КИ-ТВМ-РАВИС с использованием того же кодера LDPC, что и в передатчике, чтобы оценить скорость исходного закодированного потока данных. Этот поток данных побитно сравнивается с сигналом до канального декодера (см. рисунок 6).
При измерении должно быть использовано, по крайней мере, несколько сотен битовых ошибок.
|
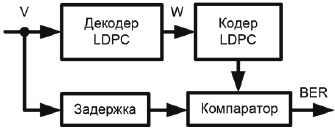
Рисунок 6 - Измерение BER до канального декодера LDPC
6.4.12.2 Проверка BER до внешнего декодера БЧХ
Цель: BER является основным параметром, который описывает качество сети цифровой передачи.
Измерительный интерфейс: X.
Измерительный сигнал: "ИС ПСДП".
Метод: BER определяется как отношение между количеством принятых ошибочных бит и общим количеством переданных бит.
Имеются два альтернативных метода: один для использования "При отключении сервиса", второй - "Без отключения сервиса". В обоих случаях измерение должно осуществляться только при наличии локальной связи (LAT), определенной в пункте 6.2 [2].
6.4.12.2.1 Измерение при отключении сервиса
Измерительный сигнал: "ИС ПФ ИП" - повторяющийся фиксированный измерительный пакет.
Основной принцип этого измерения заключается в порождении в кодере канала известной фиксированной повторяющейся последовательности бит псевдослучайного вида. Для этого на вход блока формирования кадров данных необходимо подавать информацию следующего вида: тип потока данных - НСПД, в котором отсутствуют номера кадров данных и пользовательские пакеты (0, после заголовка КД следует заполнение). На выходе кадр данных состоит из заголовка (4 байта,
![]() ), за которым следуют нулевые биты.
), за которым следуют нулевые биты.
6.4.12.2.2 Измерение без отключения сервиса
Основное предположение, сделанное в этом методе измерений, состоит в том, что проверочные байты кода LDPC вычисляются для каждого звена цепи передачи. При нормальных условиях работы декодер LDPC будет исправлять все ошибки и выдавать пакеты ТП без ошибок. Если встречаются большие пачки ошибок, то алгоритм декодирования LDPC может быть перегружен и не справится с коррекцией пакета. В этом случае должен быть установлен в "1" бит transport_error_indicator, никакие другие биты в пакете не должны меняться, а 16 проверочных байтов LDPC соответствующим образом пересчитываются перед ретрансляцией по следующему звену. В этом случае BER, измеренный в любой точке цепи передачи, относится только к конкретному звену.
Количество ошибочных бит в пакете ТП должно оцениваться с помощью побитового сравнения этого пакета ТП до и после декодирования LDPC. Если измеренное значение BER превышает 10, то измерение должно оцениваться как ненадежное из-за ограничений, накладываемых алгоритмом декодирования LDPC. Любой пакет ТП, который декодер LDPC не способен исправить, должен инициировать повторное вычисление.
6.4.12.3 Проверка BER после внешнего декодера LDPC (количество ошибочных бит)
Цель: Получение информации о схеме возникновения ошибок в битах.
Измерительный интерфейс: Y.
Метод: Используется тот же принцип, что и при "Измерении при отключении сервиса" "BER до внешнего декодера LDPC", которое описано в 6.4.14.2.1, с той разницей, что результат представляется как количество ошибок, а не как отношение. Приемник должен лишь сравнить полученные пакеты ТП с нулевыми пакетами, определенными в параграфе А.1.2 [2]. Этот метод применяется в случаях, когда значение ![]() 10
10 до декодера LDPC.
Он может использоваться в качестве одного из параметров для схемы оценки качества цепи передачи, определенной оператором, или для решения специфических проблем.
Приемник РАВИС считается выдержавшим испытания по данному параметру, если BER до внутреннего декодера LDPC не более 10, BER до внешнего декодера БЧХ не более 10
, BER после внешнего декодера БЧХ (частота появления ошибочных бит) не более 10 бит в час.
6.4.13 Анализ сигналов I и Q системы РАВИС
Анализ искажений сигналов I и Q системы РАВИС проводить в соответствии со структурной схемой, приведенной на рисунке 7.
|
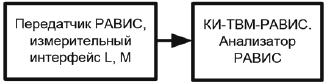
Рисунок 7 - Схема измерения искажений сигналов I и Q
Цель: Измерение искажений параметров сигналов I и Q.
Измерительный интерфейс: L, M.
Измерительный сигнал: "ЦИС БИ" - цифровой ИС с нулевыми искажениями по всем измеряемым параметрам сигналов I и Q.
Метод: Анализатор РАВИС в автоматическом режиме обрабатывает сигналы I и Q в соответствии с алгоритмами, описанными в 6.4.15.1-6.4.15.6.
В передатчике РАВИС сформировать сигнал системы РАВИС с условной полосой 250 кГц, модуляцией QPSK и с уровнем минус 10 дБм. Включить анализатор РАВИС комплекса измерительного КИ-ТВМ-РАВИС. В анализаторе РАВИС проконтролировать наличие сигнала, провести измерения параметров ППС и искажений сигналов I и Q.
6.4.13.1 Проверка относительной ошибки модуляции (MER) и величины вектора ошибки (EVM)
Алгоритмы измерения MER и EVM описываются формулами:
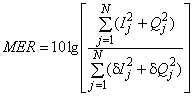 , дБ,
, дБ,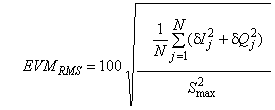 , %,
, %,
где и
- идеальные координаты;
и
- ошибки в полученных выборках данных;
- число выборок в измерительной последовательности;
- десятичный логарифм отношения [.];
- максимально возможная амплитуда вектора созвездия.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра MER сигнала РАВИС не менее 42 дБ на интерфейсе L и не менее 36 дБ на интерфейсе М, а измеренное значение параметра EVM не более 0,8% на интерфейсе L и не более 1,5% на интерфейсе M.
6.4.13.2 Проверка систематической ошибки положения точек созвездия (STE)
Алгоритм измерения STE описывается формулой
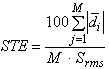 , %,
, %,
где ![]() для всех
для всех ![]() точек принятых данных с нижним индексом
точек принятых данных с нижним индексом ,
![]() и
и ![]() ,
, 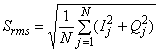 .
.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра STE сигнала РАВИС не более 0,25% на интерфейсе L и не более 0,5% на интерфейсе M.
6.4.13.3 Проверка дисбаланса амплитуды (AI)
Алгоритм измерения AI описывается формулой
 ,
,
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() соответственно
соответственно и
- компоненты величины вектора систематической ошибки символа
, определенной в 6.4.13.2.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра AI сигнала РАВИС не более 0,025% на интерфейсе L и не более 0,05% на интерфейсе M.
6.4.13.4 Проверка квадратурной ошибки (QE)
Алгоритм измерения QE описывается формулой
![]() , °,
, °,
где ,
- углы, определяемые в соответствии с рисунком 8.
|
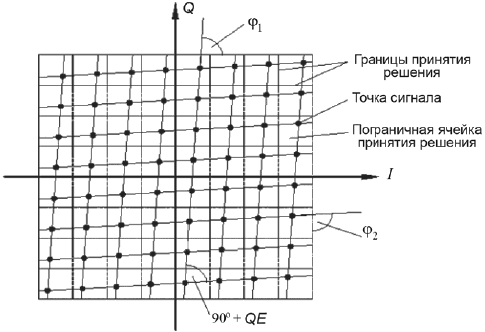
Рисунок 8 - Искажение диаграммы созвездия, вызванное квадратурной ошибкой
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра QE сигнала РАВИС не более 0,025° на интерфейсе L и не более 0,05° на интерфейсе M.
6.4.13.5 Проверка фазового джиттера (PJ)
Алгоритм измерения PJ описывается формулой
 , °,
, °,
где ![]() ;
;
![]() - угол между осью
- угол между осью созвездия и вектором полученного символа (
,
);
![]() - угол между осью
- угол между осью созвездия и вектором соответствующего точного символа (
,
).
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра PJ сигнала РАВИС не более 0,05° на интерфейсе L и не более 0,1° на интерфейсе M.
6.4.13.6 Проверка подавления несущей (CS)
Алгоритм измерения CS описывается формулой
 , дБ,
, дБ,
где - средняя мощность пилотных несущих без учета центральной несущей;
- отклонение мощности центральной пилотной несущей сигнала, модулированного OFDM, от средней мощности остальных пилотных несущих.
Система РАВИС считается выдержавшей испытания по данному параметру, если измеренное значение параметра CS не менее 66 дБ на интерфейсе L и не менее 60 дБ на интерфейсе M.
6.4.14 Проверка неравномерности АЧХ и ГВЗ
Цель: АЧХ и ГВЗ являются важными характеристиками передатчика сигнала OFDM и канала передачи, влияющими на точность обработки сигналов РАВИС.
Измерительный интерфейс: L , M или N.
Измерительный сигнал: "ИС ПСДП".
Метод: При измерениях максимальной неравномерности АЧХ используется формула
 , дБ,
, дБ,
где - мощность пилотной несущей сигнала с максимальным уровнем, модулированного OFDM;
- мощность пилотной несущей с минимальным уровнем.
При измерениях максимальной неравномерности ГВЗ используется формула
![]() , нc,
, нc,
где - максимальное время задержки пилотной несущей сигнала в спектре OFDM;
- минимальное время задержки пилотной несущей сигнала в спектре OFDM.
Измерения проводятся с помощью комплекса КИ-ТВМ-РАВИС в автоматическом режиме.
Система РАВИС считается выдержавшей испытания по данному параметру, если неравномерность АЧХ для условной ширины полосы 100; 200; 250 кГц сигнала РАВИС не более ±0,5 дБ на интерфейсе L и не более ±2,5 дБ на интерфейсе М, а неравномерность ГВЗ не более ±5 нс на интерфейсе L и не более ±10 нс на интерфейсе М.
6.5 Проверка соответствия требованиям устойчивости к климатическим и механическим воздействиям
6.5.1 Проверку на соответствие требованиям 5.4.1 проводят испытанием системы РАВИС при работе в следующих климатических условиях:
- температура воздуха в помещении от 10°C до 25°C;
- относительная влажность 80% при температуре 20°C.
В процессе испытаний системы РАВИС в течение контрольного времени при повышенной температуре, пониженной температуре, повышенной влажности основные параметры должны соответствовать требованиям раздела 5 и подраздела 6.2 настоящего стандарта.
6.5.2 Проверку соответствия требованиям устойчивости к климатическим и механическим воздействиям (см. 5.4.2) при хранении и транспортировании проводят по ГОСТ 22261.
Приложение А
(обязательное)
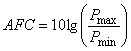
Маски огибающей внеполосных радиоколебаний для условных значений ширины полосы частот 100, 200 и 250 кГц
|
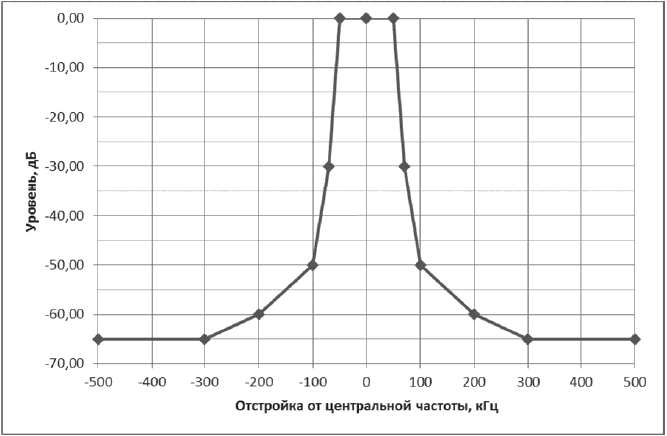
Рисунок А.1 - Маска огибающей внеполосных радиоколебаний для условной ширины полосы частот 100 кГц
|
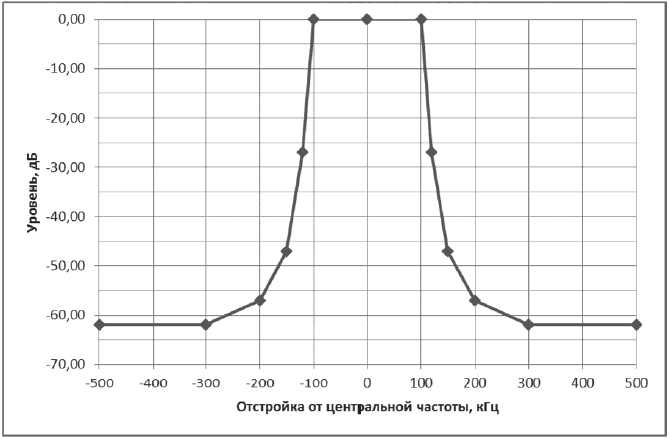
Рисунок А.2 - Маска огибающей внеполосных радиоколебаний для условной ширины полосы частот 200 кГц
|
Рисунок А.3 - Маска огибающей внеполосных радиоколебаний для условной ширины полосы частот 250 кГц
Приложение Б
(обязательное)
График зависимости BER от ОСШ
|
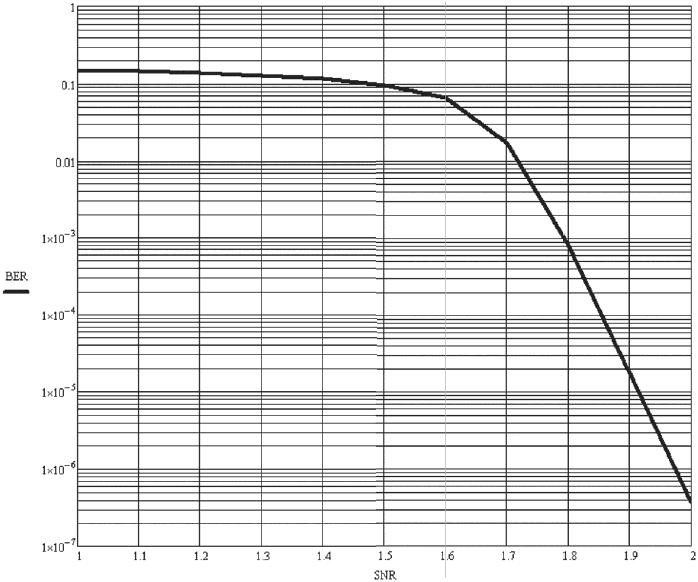
Рисунок Б.1 - График зависимости BER от ОСШ
Приложение В
(рекомендуемое)
Примеры измерений в радиочастотном диапазоне
Проверка точности настройки по РЧ (см. 6.4.1)
В анализаторе спектра с помощью программы управления ESA-F_ref.vee программного комплекса VEE Pro измерить частоты и
![]() (см. рисунки В.1 и В.2).
(см. рисунки В.1 и В.2).
Анализ результатов измерений показывает, что анализатор спектра имеет абсолютную погрешность измерения частоты 11 Гц (см. рисунок В.2), откорректированное значение центральной частоты спектра ![]() 66859996 Гц.
66859996 Гц.
|
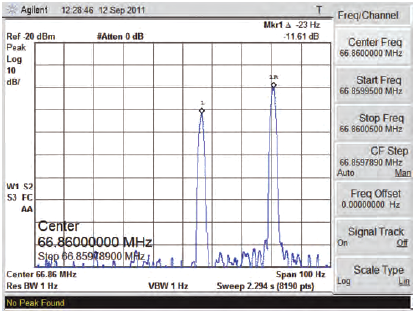
Рисунок B.1 - Agilent E440B. Результат измерений разности частот и
![]()
|
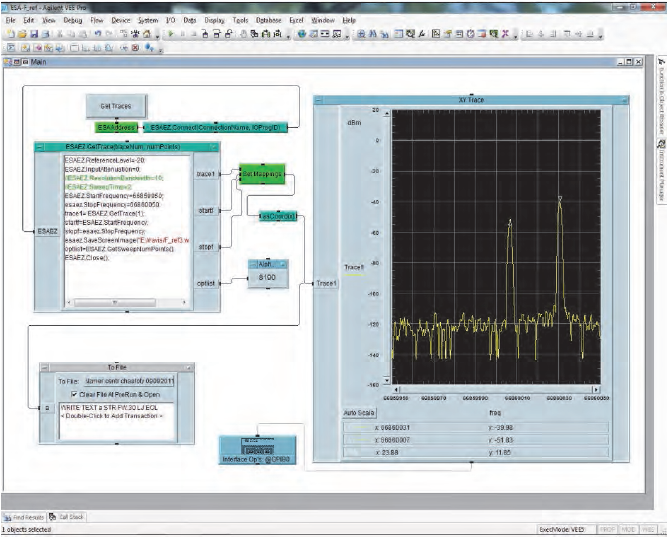
Рисунок В.2 - VEE Pro. Результаты измерений частот и
![]() и их разности
и их разности
Проверка ширины канала (расстояния между крайними несущими спектра сигнала) по РЧ (см. 6.4.2)
Рассмотрим методику измерения для ширины полосы частот спектра 250 кГц. Для полосы частот спектра 200 и 100 кГц методика измерения аналогична.
Полоса 250 кГц
Измерение ППН с минимальной частотой
В анализаторе спектра с помощью программы управления ESA-F_min-250.vee программного комплекса VEE Pro измерить частоты ![]() и
и ![]() , результаты измерений показаны на рисунках В.3 и В.4. Анализ результатов измерений показывает, что анализатор спектра имеет абсолютную погрешность измерения частоты 10 Гц (см. рисунок В.4), откорректированное значение частоты
, результаты измерений показаны на рисунках В.3 и В.4. Анализ результатов измерений показывает, что анализатор спектра имеет абсолютную погрешность измерения частоты 10 Гц (см. рисунок В.4), откорректированное значение частоты ![]() 66737329 Гц.
66737329 Гц.
Измерение ППН с максимальной частотой
В анализаторе спектра с помощью программы управления ESA-F_max-250.vee программного комплекса VEE Pro измерить частоты и
![]() , результаты измерений показаны на рисунках В.5 и В.6. Анализ результатов измерений показывает, что анализатор спектра имеет абсолютную погрешность измерения частоты 10 Гц (см. рисунок В.6), откорректированное значение частоты
, результаты измерений показаны на рисунках В.5 и В.6. Анализ результатов измерений показывает, что анализатор спектра имеет абсолютную погрешность измерения частоты 10 Гц (см. рисунок В.6), откорректированное значение частоты ![]() 6698266662 Гц.
6698266662 Гц.
Таким образом, измеренное значение ширины полосы частот =245,333 кГц.
|
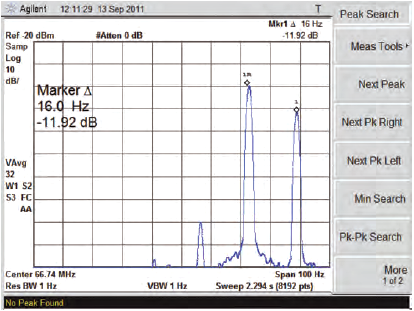
Рисунок В.3 - Agilent E440B. Результат измерений разности частот ![]() и
и ![]()
|
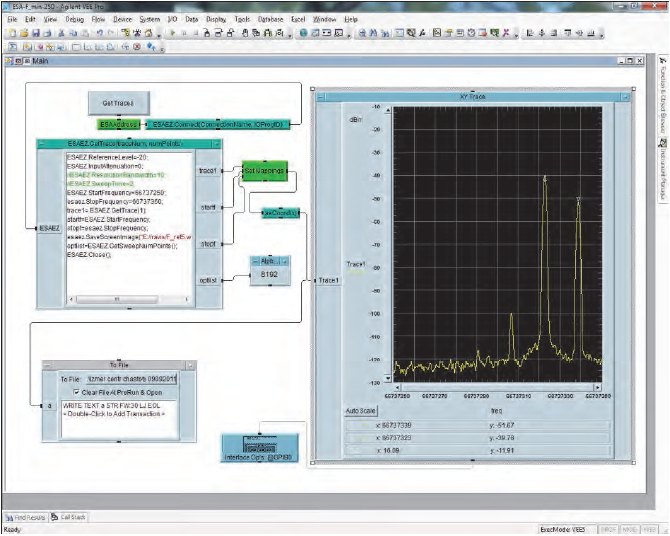
Рисунок В.4 - VEE Pro. Результаты измерений частот ![]() и
и ![]() и их разности
и их разности
|
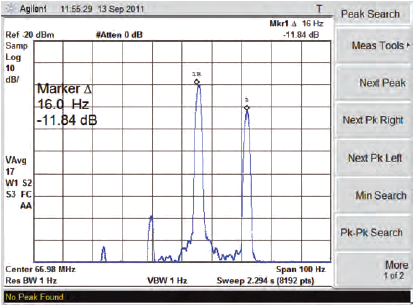
Рисунок В.5 - Agilent E440B. Результат измерений разности частот и
![]()
|
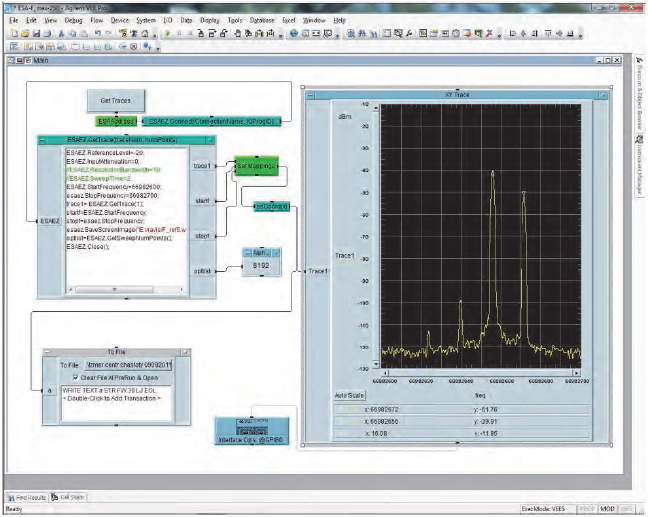
Рисунок В.6 - VEE Pro. Результаты измерений частот и
![]() и их разности
и их разности
Проверка длительности символа на радиочастоте (проверка защитного интервала) (см. 6.4.3)
В анализаторе спектра с помощью программы управления Symbol_lenght_measurement.vee программного комплекса VEE Pro измерить период повторения РПН с одной и той же фазой, соответствующий длительности пяти последовательных символов РАВИС (результаты измерений показаны на рисунках В.7-В.9).
Измеренная длительность пяти последовательных символов РАВИС составляет 2,525 мс (см. рисунок В.8).
|
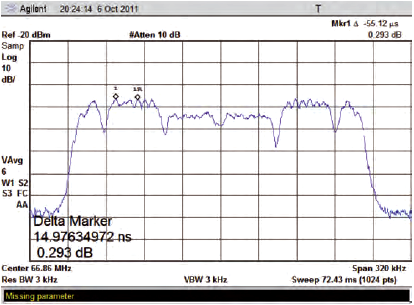
Рисунок В.7 - Спектр ИС "РПН" в полосе сканирования (Span) 320 кГц
|
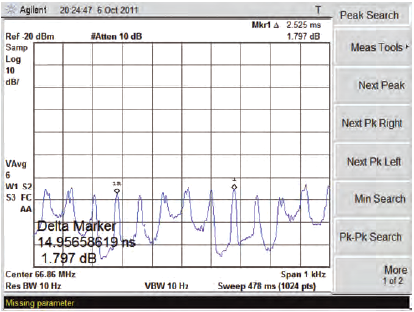
Рисунок В.8 - Спектр ИС "РПН" в полосе сканирования (Span) 1 кГц
|
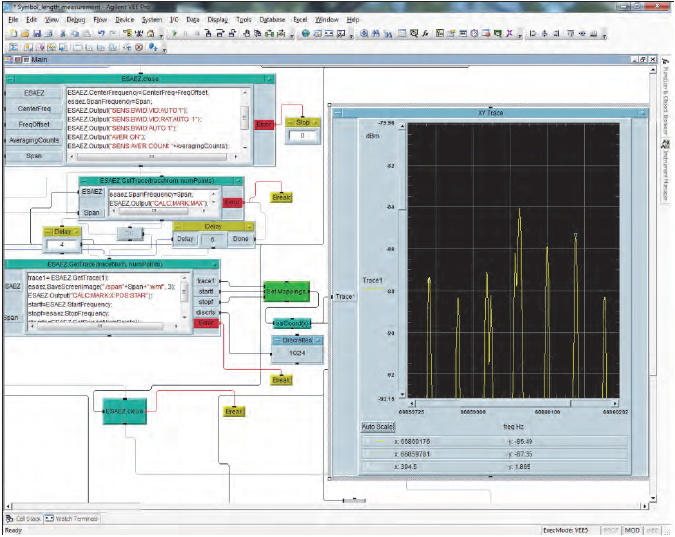
Рисунок В.9 - VEE Pro. Измерение длительности пяти последовательных символов РАВИС
Проверка спектральных характеристик на РЧ и ПЧ (см. 6.4.4)
1 Проверка спектра РЧ и ПЧ
1.1 При измерениях плотности спектра ПЧ и РЧ-сигнала РАВИС используется программа Spectrum_mask2.vee программного комплекса Agilent VEE Pro.
Измерения спектральной плотности мощности производятся циклами по всем точкам маски спектра. Измерения каждой точки маски проводятся с 64-кратным усреднением в полосе 1 кГц. Общее количество циклов равно 16. Полученные данные обрабатываются в программе lzm_Spectr_maski.xmcd программного комплекса MathCAD.
Измеренная плотность мощности шума составила минус 130 дБм/Гц. На рисунке В.10 приведена измеренная плотность спектра ПЧ и РЧ-сигнала РАВИС в полосе 250 кГц, нормированная к уровню минус 24 дБм/Гц (график "Уровень 1") и маска плотности спектра (график "Уровень 2").
1.2 При измерениях плотности спектра ПЧ и РЧ-сигнала РАВИС в полосах 200 и 100 кГц программа Spectrum_mask2.vee программного комплекса Agilent VEE Pro должна быть модифицирована с учетом параметров этих полос.
|
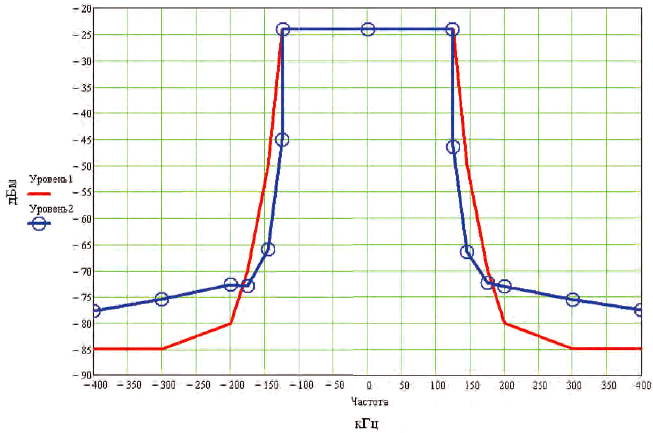
Рисунок В.10. Плотность спектра ПЧ и РЧ-сигнала РАВИС в полосе 250 кГц
2 Проверка мощности сигнала РЧ/ПЧ
2.1 При измерениях используется сигнал, состоящий из синусоидального сигнала с частотой 66,610000 МГц, соответствующей центру соседнего канала, и сигнала РАВИС с центральной частотой 66,860000 МГц (см. рисунок В.11).
Проверка анализатора спектра
Измерение собственного шума анализатора спектра (все сигналы отключены, входы сумматора заглушены нагрузками 50 Ом). Измеренная мощность собственного шума в полосе 245,333 кГц равна минус 85,10 дБм (см. рисунок В.12).
Измерить анализатором спектра мощность синусоидального сигнала с частотой 66,610000 МГц, соответствующей центру соседнего канала, с уровнем 5 мВ с выхода генератора прецизионного (сигнал РАВИС отключен, вход сумматора заглушен нагрузкой 50 Ом). Измеренная мощность синусоидального сигнала в полосе 1 кГц равна минус 46,62 дБм относительно опорного уровня 500 мВ (см. рисунок В.13). Для проверки опорного уровня проведите измерение сигнала с размахом 500 мВ в полосе 1 кГц. Результат должен быть не более ±1 дБм (полученный результат минус 0,54 дБм).
|
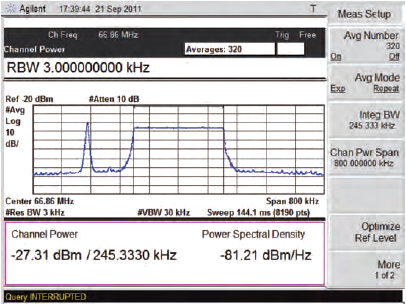
Рисунок В.11 - Сигнал для измерения мощности
|
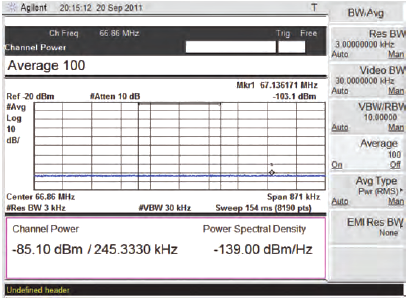
Рисунок В.12 - Измерение мощности собственного шума анализатора спектра
|
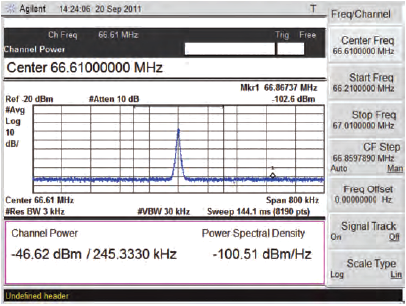
Рисунок В.13 - Измерение мощности синусоидального сигнала
2.2 При измерениях мощности сигнала РАВИС и мощности шума в полосе 250 кГц используется программа Ch_Power_meas4.vee программного комплекса Agilent VEE Pro (см. рисунок В.14).
|
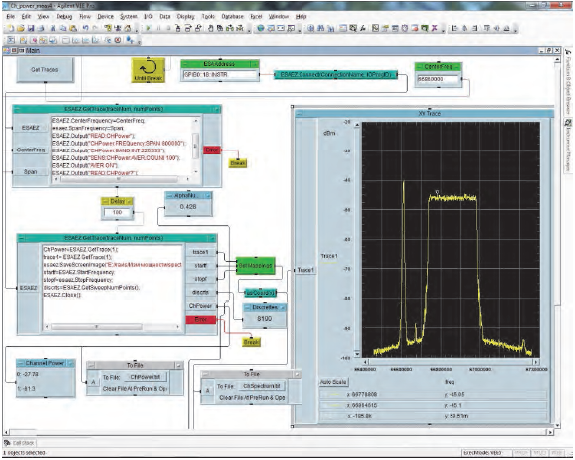
Рисунок В.14 - Измерение мощности сигнала РАВИС
Не меняя полосу измеряемых частот (Span), измерить мощность сигнала РАВИС (см. рисунок В.14), после чего измерить мощность шума (см. рисунок В.15) (сигнал РАВИС отключен, вход заглушен нагрузкой 50 Ом). В полосе канала 245,333 кГц измеренная мощность сигнала РАВИС равна минус 27,31 дБм, измеренная мощность шума равна минус 85,02 дБм.
|
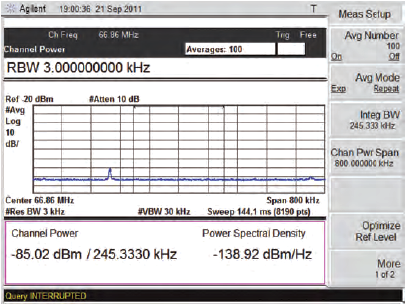
Рисунок В.15 - Измерение мощности шума
2.3 Измерение мощности сигнала РАВИС в различных частях спектра с центральной частотой 66,680000 МГц - "внутри" полосы частот (225,333 и 235,333 кГц) и "вне" - в расширенных полосах частот, захватывающих интервалы нарастания и спада спектра частот сигнала РАВИС (255,333; 265,333; 275,333; 285,333; 295,333; 305,333; 315,333; 325,333 и 335,333 кГц) проводятся аналогично измерениям по 6.4.4.2. На рисунке В.16 показано изменение мощности сигнала при изменении полосы измеряемых частот относительно центральной полосы канала.
При измерениях мощности сигнала РАВИС и мощности шума в полосах 200 и 100 кГц программа Ch_Power_meas4.vee программного комплекса Agilent VEE Pro должна быть модифицирована с учетом параметров этих полос.
|
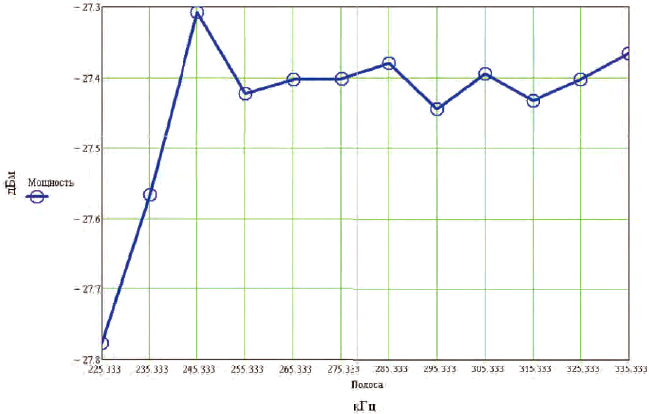
Рисунок В.16 - Измерение мощности сигнала РАВИС в различных частях спектра
Проверка мощности шума (см. 6.4.4.3)
В соответствии с 6.4.4.2.2 в полосе канала 245,333 кГц измеренная мощность сигнала РАВИС равна минус 27,31 дБм, измеренная мощность шума равна минус 85,02 дБм, откуда ОСШ равно 57,71 дБ.
Проверка характеристики линейности (подавления выброса) (см. 6.4.9)
При измерениях параметра ПВ сигнала РАВИС (внеполосного излучения) в полосе 250 кГц используется программа Spectrum_shoulder_measurement2.vee программного комплекса Agilent VEE Pro.
Форма спектра в полосе сканирования (Span) 320 кГц показана на рисунке В.17.
Форма спектров на интервалах частот, центры которых соответствуют частотам центральной частоты спектра ,
![]() - превышающей центральную частоту на 150 кГц и
- превышающей центральную частоту на 150 кГц и ![]() - меньшей центральной частоты на 150 кГц в полосе сканирования (Span) 30 кГц, показаны на рисунках В.18-В.20. Эти спектрограммы имеют нестабильный характер, их форма зависит как от времени, так и от настроек анализатора спектра - положения и протяженности интервала сканирования. Измеренные плотности мощности на этих интервалах дают более стабильные оценки и составляют соответственно минус 46,2; 82,4 и 83,4 дБм/Гц.
- меньшей центральной частоты на 150 кГц в полосе сканирования (Span) 30 кГц, показаны на рисунках В.18-В.20. Эти спектрограммы имеют нестабильный характер, их форма зависит как от времени, так и от настроек анализатора спектра - положения и протяженности интервала сканирования. Измеренные плотности мощности на этих интервалах дают более стабильные оценки и составляют соответственно минус 46,2; 82,4 и 83,4 дБм/Гц.
|
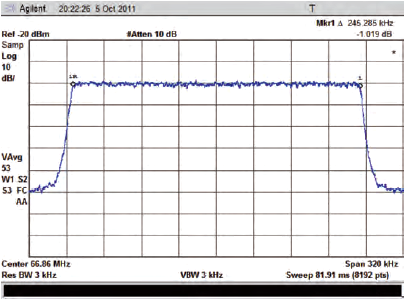
Рисунок В.17 - Форма спектра в полосе сканирования (Span) 320 кГц
|
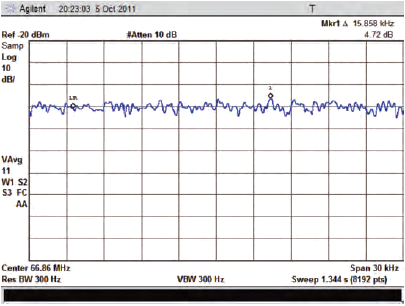
Рисунок В.18 - Форма спектра на частоте в полосе сканирования 30 кГц
|
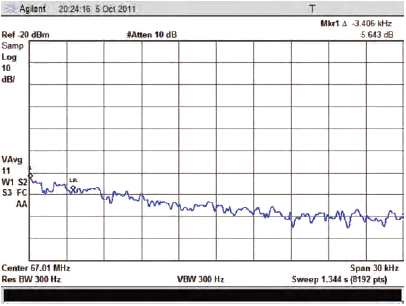
Рисунок В.19 - Форма спектра на частоте ![]() в полосе сканирования 30 кГц
в полосе сканирования 30 кГц
|
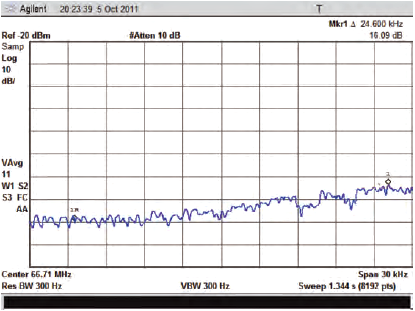
Рисунок В.20 - Форма спектра на частоте ![]() в полосе сканирования 30 кГц
в полосе сканирования 30 кГц
Для более детального исследования характера скатов спектральных характеристик, обусловленных как характеристиками канального полосового фильтра, так и нелинейностями цифрового модулятора и усилителя мощности передающей части системы РАВИС, используется измерение плотности спектральной мощности в узких, примыкающих друг к другу полосах шириной 5 кГц на интервале 30 кГц, показанных на рисунках В.21-В.33.
|
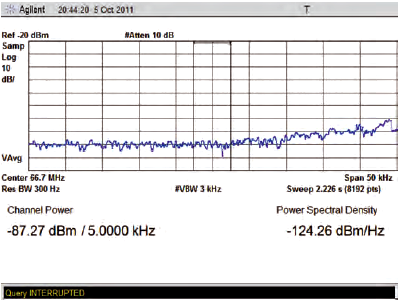
Рисунок В.21 - Плотность мощности минус 124,3 дБм/Гц на частоте ![]()
|
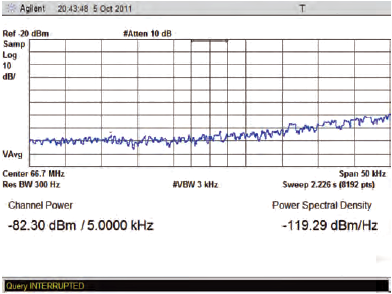
Рисунок В.22 - Плотность мощности минус 119,3 дБм/Гц на частоте ![]()
|
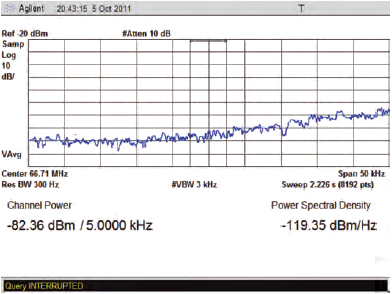
Рисунок В.23 - Плотность мощности минус 119,4 дБм/Гц на частоте ![]()
|
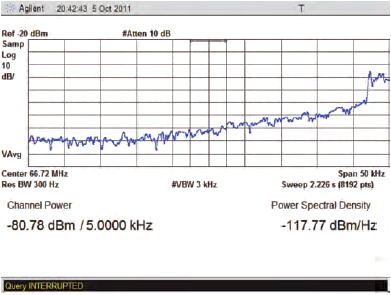
Рисунок B.24 - Плотность мощности минус 117,8 дБм/Гц на частоте ![]()
|
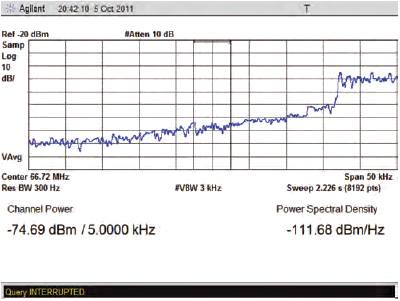
Рисунок В.25 - Плотность мощности минус 111,7 дБм/Гц на частоте ![]()
|
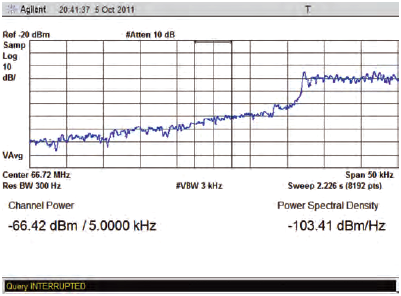
Рисунок В.26 - Плотность мощности минус 103,4 дБм/Гц на частоте ![]()
|
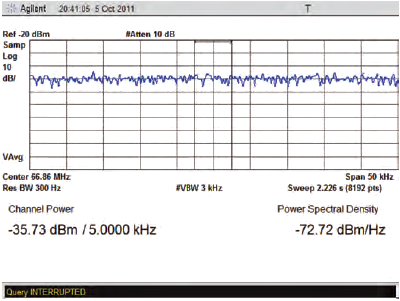
Рисунок В.27 - Плотность мощности минус 72,7 дБм/Гц на частоте
|
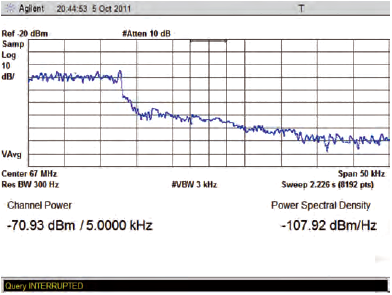
Рисунок В.28 - Плотность мощности минус 107,9 дБм/Гц на частоте ![]()
|
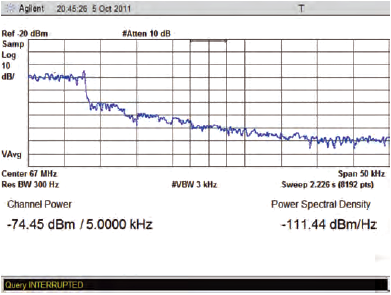
Рисунок В.29 - Плотность мощности минус 111,4 дБм/Гц на частоте ![]()
|
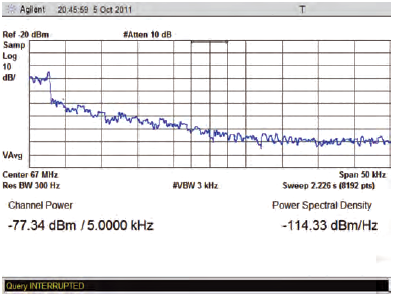
Рисунок В.30 - Плотность мощности минус 114,3 дБм/Гц на частоте ![]()
|
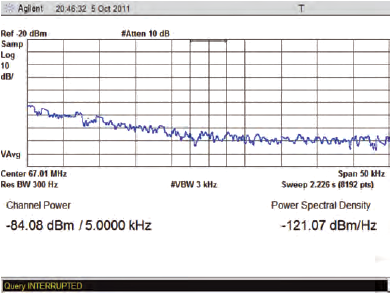
Рисунок В.31 - Плотность мощности минус 121,1 дБм/Гц на частоте ![]()
|
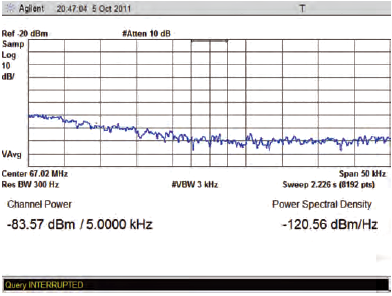
Рисунок В.32 - Плотность мощности минус 120,6 дБм/Гц на частоте ![]()
|
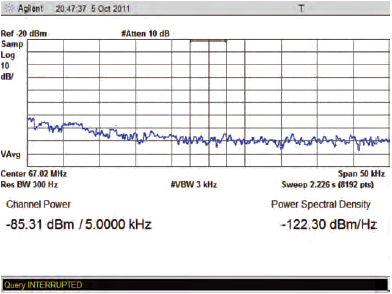
Рисунок В.33 - Плотность мощности минус 122,3 дБм/Гц на частоте ![]()
На рисунке В.34 приведены разности спектральных плотностей мощности, измеренных в окрестности частоты и в окрестностях частот от
![]() до
до ![]() .
.
Параметр ПВ определяется по максимальному значению разности спектральных плотностей мощности и составляет минус 30,7 дБм/Гц в окрестности частоты ![]() .
.
|
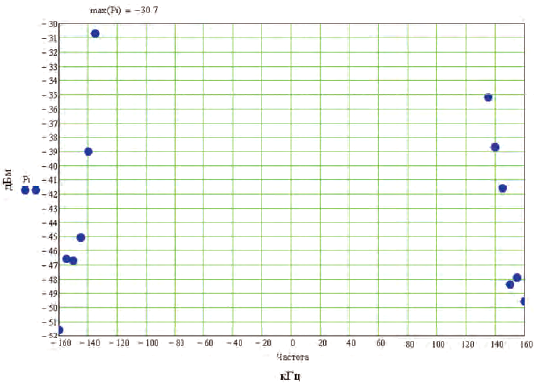
Рисунок В.34 - Разности спектральных плотностей мощности
При измерениях подавления выброса сигнала РАВИС в полосах 200 и 100 кГц программа Spectrum_shoulder_measurement2.vee программного комплекса Agilent VEE Pro должна быть модифицирована с учетом параметров этих полос по величине спектральной ширины измеряемого внеполосного излучения и его положения относительно спектра сигнала РАВИС.
Определение когерентной интерференционной помехи (см. 6.4.10)
В сигнал РАВИС с выхода генератора опорной частоты введена когерентная интерференционная помеха с частотой, близкой к центральной частоте сигнала РАВИС (см. рисунок В.3). Рисунки В.35-В.39 иллюстрируют процесс постепенного обнаружения и определения параметров когерентной интерференционной помехи при сужении полосы сканирования спектра РАВИС. Измеренные частота и уровень когерентной интерференционной помехи (без учета частотной погрешности анализатора спектра) составляют 66860007 Гц и минус 53 дБм (см. рисунок В.39).
|
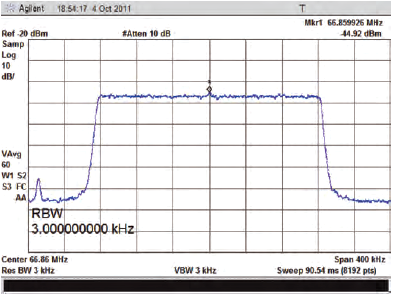
Рисунок В.35 - Полоса сканирования (Span) 400 кГц
|
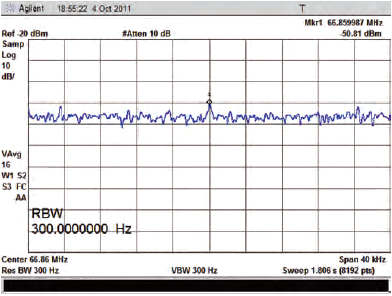
Рисунок В.36 - Полоса сканирования (Span) 40 кГц
|
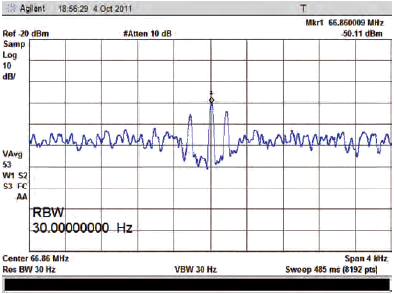
Рисунок В.37 - Полоса сканирования (Span) 4 кГц
|
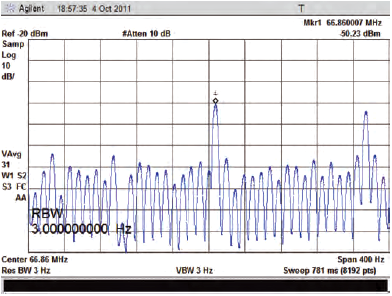
Рисунок В.38 - Полоса сканирования (Span) 400 Гц
|
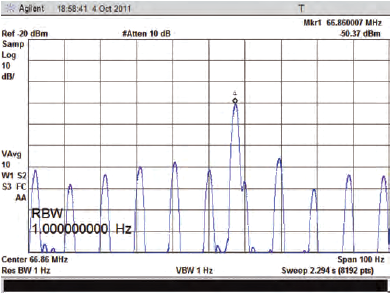
Рисунок В.39 - Полоса сканирования (Span) 100 Гц
Библиография
[1] | ИСО/МЭК 13818-1: 2007* | Информационные технологии. Универсальное кодирование движущихся изображений и связанной с ними звуковой информации: Системы |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
(ISO/IEC 13818-1:2007) | (Information technology - Generic coding of moving pictures and associated audio information: Systems) | |
[2] | ETSI TR 101 290 V1.2.1 (2001-05) | Цифровое видеовещание. Руководство по измерениям в системах DVB |
[ETSI TR 101 290 V1.2.1 (2001-05)] | [Digital Video Broadcasting (DVB); Measurement guidelines for DVB systems] | |
[3] | Документ DVB A14-2 (2012-07) | Руководство по измерениям в системах цифрового телевизионного вещания (DVB). Поправки, внесенные в систему DVB-T2 |
[DVB Document A14-2 (2012-07)] | [Digital Video Broadcasting (DVB); Measurement guidelines for DVB systems; Amendment for DVB-T2 System] | |
[4] | ETSI EN 300 744 v1.6.1 (2009-01) | Цифровое видеовещание. Методы канального кодирования, мультиплексирования и модуляции в цифровых системах наземного телевидения |
[(ETSI EN 300 744 v1.6.1 (2009-01)] | [Digital Video Broadcasting (DVB); Framing structure, channel coding and modulation for digital terrestrial television] | |
[5] | ITU-T Рекомендация O.151 (10/92) | ITU-T Рекомендация O.151: оборудование для измерения доли ошибок, работающее на первичной скорости и выше |
[(ITU-T Recommendation O.151 (10/92)] | (ITU-T Recommendation O.151: Error performance measuring equipment operating at the primary rate and above) | |
УДК 621.396:621.397:006.354 | ОКС 33.140 |
Ключевые слова: аудиовизуальная информационная система реального времени РАВИС, нормы на основные параметры, технические требования, измерительные сигналы, измерительные интерфейсы, методы измерений и испытаний | |
Электронный текст документа
и сверен по:
, 2020
