ГОСТ Р 54118-2010
Группа Э50
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальные навигационные спутниковые системы
РАДИОНАВИГАЦИОННЫЕ КОМПЛЕКСЫ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОТРЕБИТЕЛЕЙ НА ВОДНОМ ТРАНСПОРТЕ
Технические характеристики, методы и требуемые результаты испытаний
The Global Navigation Satellite Systems. Radionavigation complex spatial orientation users on the water transport. Technical requirements, test methods and required test results
ОКС 47.020.70
Дата введения 2011-12-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 РАЗРАБОТАН Закрытым акционерным обществом "Центральный научно-исследовательский и проектно-конструкторский институт морского флота" (ЗАО "ЦНИИМФ") совместно с Федеральным государственным унитарным предприятием "Научно-технический центр современных навигационных технологий "Интернавигация" (ФГУП "НТЦ "Интернавигация")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 декабря 2010 г. N 812-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых указателях "Национальные стандарты". В случае пересмотра или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на радионавигационный комплекс, предназначенный для определения по сигналам глобальных навигационных спутниковых систем (далее - ГНСС) ГЛОНАСС/GPS углов пространственной ориентации вектора углового положения судна - истинного курса, крена, дифферента, используемого на стадии плавания морских судов и судов внутреннего речного и смешанного ("река - море") плавания, которая определена как прибрежные воды, подходы к портам, узкости, где свобода маневрирования ограничена, а также при плавании в океане для судов, скорость которых не превышает 70 узлов [1].
Настоящий стандарт устанавливает технические и эксплуатационные требования, методы и требуемые результаты испытаний к аппаратуре, используемой только для целей определения углов пространственной ориентации положения диаметральной плоскости судна.
Настоящий стандарт не распространяется на другие вычислительные возможности, которые могут быть реализованы в аппаратуре потребителей.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 52928-2010 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ Р МЭК 60945-2007 Морское навигационное оборудование и средства радиосвязи. Общие требования. Методы испытаний и требуемые результаты испытаний
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины, определения, обозначения и сокращения
3.1 В проекте стандарта применены термины по ГОСТ Р 52928, а также следующие термины с соответствующими определениями:
3.1.1 абсолютная точность определения местоположения потребителя ГНСС: Точность определения местоположения потребителя в геоцентрической пространственной системе координат.
3.1.2 автономный контроль целостности навигационной аппаратуры потребителя ГНСС: Метод контроля целостности глобальной навигационной спутниковой системы, основанный на оценке параметров принимаемых радионавигационных сигналов навигационной аппаратурой потребителя ГНСС.
3.1.3 альманах ГНСС: Информация, передаваемая с каждого навигационного космического аппарата ГНСС в составе навигационного сообщения, включающая в себя данные о системной шкале времени ГНСС, данные о бортовых шкалах времени всех навигационных космических аппаратов и данные об элементах их орбит и техническом состоянии.
3.1.4 динамическая погрешность: Погрешность, вызываемая ускорениями (вибрация, бортовая и килевая качка, изменение скорости), действующими на систему. Величина и частота погрешности связаны с воздействием окружающей среды и параметрами самой системы.
3.1.5 дифферент: угол между горизонтальной и основной плоскостью судна.
3.1.6 доступность системы: Вероятность получения потребителем в рабочей зоне достоверной информации о своем местоположении в заданный момент времени и с требуемой точностью. Выражается в процентах времени на временном интервале, в течение которого обеспечиваются заданные условия.
3.1.7 интерфейсный контрольный документ ГНСС: Документ, устанавливающий структуру, содержание и формат навигационной информации, передаваемой потребителю ГНСС.
3.1.8 истинный курс: Горизонтальный угол между вертикальными плоскостями, проходящими через истинный меридиан и основную плоскость судна, отсчитываемый от истинного севера по часовой стрелке до 360°.
3.1.9 крен: Угол между вертикальной и основной плоскостью судна.
3.1.10 многолучевость радионавигационного сигнала ГНСС: Эффект, возникающий при приеме навигационной аппаратурой потребителя ГНСС радионавигационного сигнала с одного и того же навигационного космического аппарата ГНСС, но с разными траекториями прохождения вследствие отражения сигнала от поверхности Земли и близлежащих объектов.
3.1.11 определение местоположения потребителя ГНСС (Нрк. местоопределение потребителя ГНСС): Определение пространственных координат потребителя ГНСС.
3.1.12 погрешность навигационного определения: Статистическая характеристика разности между найденным положением потребителя и истинными координатами для произвольной точки в зоне обслуживания в течение заданного интервала времени.
3.1.13 разрешение неоднозначности фазовых измерений в ГНСС: Определение целого числа длин волн, укладывающихся в расстоянии между навигационным космическим аппаратом ГНСС и навигационной аппаратурой потребителя ГНСС при обработке фазовых измерений.
3.1.14 санкционированный доступ: Доступ к навигационным сигналам с использованием специальных кодов, предоставляемых потребителям.
3.1.15 системная шкала времени ГНСС: Шкала времени, предназначенная для временной привязки основных процессов во всех подсистемах ГНСС.
3.1.16 система координат: Опорная система координат, используемая для расчета координат места.
3.1.17 стандартная точность навигационных определений: Заданный уровень точности определения пространственных координат, составляющих скорости движения и поправки часов, доступный любому потребителю ГНСС.
3.1.18 функциональное дополнение ГНСС: Комплекс технических и программных средств, предназначенный для обеспечения потребителя ГНСС дополнительной информацией, позволяющей повысить точность и достоверность определения его пространственных координат, составляющих скорости движения и поправки часов и гарантирующей целостность ГНСС.
3.1.19 эфемеридная информация ГНСС: Совокупность данных навигационного сообщения, получаемого потребителем ГНСС с борта навигационного космического аппарата ГНСС и позволяющего ему определять пространственные координаты, составляющие скорости движения и время.
3.1.20 эксплуатационная готовность ГНСС (Нрк. доступность): Способность глобальной навигационной спутниковой системы обеспечивать проведение навигационных определений в заданный момент времени.
3.1.21 угловая скорость поворота: Величина изменения мгновенного значения курса за единицу времени.
3.1.22 целостность ГНСС: Способность глобальной навигационной спутниковой системы выдавать потребителям ГНСС своевременное и достоверное предупреждение в тех случаях, когда какие-либо из ее навигационных космических аппаратов нельзя использовать по целевому назначению в полном объеме.
3.2 В проекте стандарта использованы следующие обозначения и сокращения:
АИС | - | автоматическая идентификационная система; |
ГНСС | - | глобальная навигационная спутниковая система; |
ГЛОНАСС | - | глобальная навигационная спутниковая система Российской Федерации; |
ИНМАРСАТ | - | спутниковая система связи; |
КИ | - | корректирующая информация; |
ККС | - | контрольно-корректирующая станция; |
ЛДПС | - | локальная дифференциальная подсистема; |
МККР | - | Международный Консультативный Комитет по Радиосвязи; |
МПВ | - | модуль приемо-вычислительный; |
НАП | - | навигационная аппаратура потребителей; |
ПЗ-90 | - | общеземная система координат "Параметры Земли 1990 г."; |
ПКИ | - | приемник корректирующей информации; |
РКПО | - | радионавигационный комплекс пространственной ориентации; |
С/А | - | открытый код доступа; |
СКП | - | средняя квадратическая погрешность; |
СТ | - | стандартная точность; |
COG | - | курс относительно грунта (Путевой угол); |
COR | - | поправки; |
DGPS | - | дифференциальная подсистема ГНСС GPS; |
DTM | - | опорные системы координат; |
DGLN | - | дифференциальная подсистема ГНСС ГЛОНАСС; |
ELV | - | угол возвышения спутника над горизонтом; |
GPS | - | глобальная навигационная спутниковая система Соединенных Штатов Америки; |
GBS | - | определение отказа спутника ГНСС; |
GGA | - | данные о координатах места по GPS; |
GLL | - | данные о координатах места; |
GNS | - | данные о координатах места по ГНСС GPS и ГЛОНАСС; |
GRS | - | разность дальностей до спутника ГНСС; |
GSA | - | фактор ухудшения точности ГНСС, действующие спутники; |
GST | - | статистическая ошибка псевдодальности по ГНСС; |
GSV | - | видимые спутники ГНСС; |
HDOP | - | горизонтальный геометрический фактор ухудшения точности местоопределения в режиме двухмерных измерений; |
HDT | - | данные об истинном курсе; |
MSK | - | манипуляция с минимальным фазовым сдвигом; |
PDOP | - | пространственный геометрический фактор ухудшения точности в режиме трехмерных измерений местоположения; |
NMEA | - | национальный морской стандарт для сопряжения с внешним навигационным оборудованием; |
PRDCU | - | углы пространственной ориентации - курс, крен, дифферент; |
PRC | - | поправка псевдодальности; |
RRC | - | поправка к скорости изменения псевдодальности; |
RAIM | - | автономный контроль целостности в приемнике; |
RMC | - | рекомендуемый минимальный перечень данных по GPS и ГЛОНАСС; |
ROT | - | скорость поворота судна; |
RTCM | - | радиотехническая комиссия по морским службам; |
RTCA | - | радиотехническая комиссия по авиационным службам; |
SA | - | режим избирательного доступа работы ГНСС GPS; |
SBAS | - | система функциональных дополнений спутникового базирования; |
SOG | - | скорость относительно грунта; |
VTG | - | путевой угол и скорость относительно грунта; |
UTC | - | универсальное координированное время; |
УКВ | - | ультракороткие волны; |
UTC(SU) | - | Координированное всемирное время России; |
WGS-84 | - | всемирная геодезическая система координат 1984 г.; |
WER | - | ошибка слов, характеризующая процент потерянной информации; |
VDL | - | УКВ линия передачи данных АИС; |
ZDA | - | время и дата. |
4 Технико-эксплуатационные требования к РКПО
4.1 Общие требования к РКПО
Технологии и методы использования РКПО включают в себя определение углов пространственной ориентации диаметральной плоскости судна, крена, дифферента, а также оценку и контроль характеристик используемой аппаратуры на водном транспорте. Характеристики РКПО определяются с учетом следующих возможных помехообразующих факторов, действующих в процессе формирования измерительной информации:
- погрешностей бортовой шкалы времени навигационных спутников;
- погрешностей расчета эфемерид навигационных спутников с использованием аппаратуры потребителя;
- инструментальных погрешностей аппаратуры потребителя, обусловленных наличием шумов в тракте приемника;
- препятствий прохождению радиосигналов за счет воздействия окружающих объектов инфраструктуры судна в горизонтальной плоскости диаграммы направленности антенн;
- многолучевости распространения сигналов ГНСС в результате воздействия на вход приемника переотраженных сигналов от металлических объектов и поверхностей, имеющих хорошую отражающую способность;
- ионосферной и тропосферной задержки сигналов;
- геометрического расположения приемника и наблюдаемых спутников, влияние которого на точность определения координат объекта характеризуется соответствующим геометрическим фактором;
- радиопомех, создаваемых различными внешними источниками.
Характеристики РКПО должны соответствовать требованиям по точности определения вектора положения диаметральной плоскости судна - истинного курса, крена, дифферента для условий эксплуатации на морских судах и судах внутреннего речного и смешанного ("река - море") плавания.
При выборе характеристик используемой аппаратуры необходимо учитывать присущие ей особенности, основными из которых являются методы и режимы применения:
- автономный режим, который предполагает использование для решения навигационной задачи определения вектора положения информации, поступающей от ГЛОНАСС или ГЛОНАСС/GPS;
- дифференциальный режим, предполагающий использование для решения навигационной задачи определения вектора положения судна корректирующей информации (дифференциальных поправок) от широкозонных дифференциальных подсистем спутникового базирования SBAS, от береговых контрольно-корректирующих станций, работающих в СВ-диапазоне частот, а также поправок, передаваемых по УКВ каналам АИС;
- статический режим функционирования, который обеспечивает усреднение мгновенных значений координат за заданный период времени при различных расположениях спутниковых созвездий, что позволяет уменьшить ошибки решения задачи за счет систематической и шумовой составляющих.
4.1.1 Методы определения координат
1 Автономный режим
Применяется для получения координат местоположения антенн РКПО на судне с метровыми уровнями точности при плавании в открытом море и в прибрежной зоне. Точность автономного позиционирования оценивается с учетом основных помехообразующих факторов - погрешностей эфемерид наблюдаемых спутников, погрешностей привязки навигационного сигнала к бортовой шкале времени навигационного спутника; инструментальных погрешностей аппаратуры потребителей, а также влияния внешней среды на распространение радиосигналов.
Применение автономного режима определения текущих значений навигационных параметров осуществляется с учетом возможных значений СКП определения абсолютных координат, в зависимости от используемой ГНСС. Без использования кодов высокой точности погрешность определения координат (с вероятностью 95%) составляет: по системе GPS - 13 метров, по системе ГЛОНАСС - 40 м, в совмещенном режиме ГЛОНАСС/GPS - 15 м.
2 Относительные определения
Для обеспечения выработки аппаратурой углов пространственной ориентации судна: курса, крена и дифферента приемники ГНСС в составе РКПО помимо стандартных измерений радионавигационного параметра должны формировать измерения полной фазы несущей частоты для каждой из используемых антенн. Инструментальная погрешность измерения фазы несущей не должна превышать 1 мм.
3 Дифференциальный режим
Применяется для получения координат местоположения антенн РКПО на судне с метровым уровнем точности при использовании дифференциальных поправок, которые вычисляются как разности между измеренными значениями псевдодальностей и значениями расстояний между приемником и спутниками, вычисленными по известным значениям координат антенн приемников ККС и бортовым эфемеридам спутников.
РКПО должен обеспечивать возможность приема и обработки корректирующей информации, формируемой:
- широкозонными дифференциальными подсистемами стандарта SBAS;
- ККС ГЛОНАСС/GPS в СВ диапазоне частот, в соответствии с [4];
- базовыми станциями АИС в виде VDL сообщения 17.
Метод дифференциального позиционирования применяется в пределах объявленной рабочей зоны дифференциальной подсистемы с учетом максимально допустимого удаления судна от ККС, в пределах которого изменение дифференциальных поправок считается незначительным. Дифференциальный режим обеспечивает погрешность определения координат антенн РКПО в статическом и динамическом режиме работы, не превышающую 10 м (для вероятности 95%).
В нормальных условиях работы погрешности измерений навигационных параметров в дифференциальном режиме по ГНСС ГЛОНАСС/GPS должны быть:
- 3 м при использовании сигналов поправок широкозонных дифференциальных подсистем в формате SBAS;
- 2 м при использовании дифференциальных поправок, принимаемых от ККС, работающих в СВ-диапазоне.
Погрешности измерений углов пространственной ориентации с вероятностью 95% должны быть:
- курса судна 0,2°/, где
- длина антенной базы в метрах;
- крена и дифферента 0,4°/, где
- длина антенной базы в метрах.
4.2 Назначение радионавигационного комплекса пространственной ориентации
РКПО должен обеспечивать непрерывную автоматическую выработку текущих значений углов пространственной ориентации диаметральной плоскости судна (курса, крена, дифферента) потребителей на водном транспорте по сигналам ГНСС ГЛОНАСС/GPS.
РКПО предназначен для навигационного обеспечения морских судов при плавании в открытом море и прибрежной зоне, по каналам на подходах к портам, в портовых водах, прохождении узостей, где свобода маневрирования затруднена, а также для навигационного обеспечения судов речного флота при движении по озерам, водохранилищам, рекам и каналам.
Настоящий стандарт применим также для высокоскоростных судов.
Настоящий стандарт устанавливает основные требования к РКПО в части определения составляющих вектора углового положения - истинного курса, крена, дифферента.
В настоящем стандарте к РКПО в качестве дополнительной функциональной возможности включены требования к вычислению других параметров, которые обеспечены в аппаратуре и касаются определения координат места судна, скорости относительно грунта, путевого угла и времени.
Дополнительные возможности РКПО, связанные с вычислительными функциями передачи входных/выходных данных и отображением информации на дисплее, не должны ухудшать характеристик аппаратуры, определяемых настоящим стандартом.
4.3 Требования к составу оборудования РКПО
Термин "Радионавигационный комплекс пространственной ориентации углов положения судна" определяет состав аппаратуры, включающей все узлы и блоки, которые необходимы для выполнения заданных функций аппаратуры.
В состав РКПО в обязательном порядке должны входить следующие функциональные блоки:
1) антенны, обеспечивающие прием сигналов ГНСС ГЛОНАСС/GPS. Количество антенн определяется количеством установленных приемников. При наличии трех приемников возможно однозначное определение всех трех углов пространственной ориентации диаметральной плоскости судна - курса, крена и дифферента. При использовании двух антенн возможно определение любых двух углов в зависимости от ориентации антенной базы;
2) антенна, обеспечивающая прием дифференциальных поправок, передаваемых береговыми станциями диффподсистемы. Прием дифференциальных поправок от широкозонных систем спутникового базирования осуществляется по основным каналам приема сигналов ГНСС;
3) приемники сигналов системы ГЛОНАСС/GPS. При наличии трех приемников возможно однозначное определение всех трех углов пространственной ориентации судна - курса, крена и дифферента.
При использовании двух возможно определение любых двух углов в зависимости от ориентации антенной базы;
4) встроенный в РКПО приемник сигналов корректирующей информации, передаваемой береговыми контрольно-корректирующими станциями диффподсистемы в средневолновом диапазоне;
5) процессор, обеспечивающий обработку и расчет параметров - углов пространственной ориентации судна, а также координат местоположения;
6) устройство контроля и сопряжения;
7) дисплей для отображения углов курса, крена, дифферента и других выходных данных - координат местоположения, скорости и путевого угла.
4.4 Технические требования к РКПО
4.4.1 Приемники РКПО должны обеспечивать прием и обработку сигналов спутников ГНСС ГЛОНАСС на положительных, нулевых и отрицательных литерах (СТ - код) и GPS (С/А - код) в диапазоне частот L1, а также обеспечивать расчет широты и долготы места судна в общеземной системе координат ПЗ-90.02 и Всемирной геодезической системе координат WGS-84 с отображением географических координат в градусах, минутах, тысячных долях минуты и времени обсерваций относительно UTC(USNO).
Должна быть предусмотрена возможность преобразования вычисленных данных в систему координат, применяемую в используемой навигационной карте. Если такая возможность предусмотрена, то на дисплее должен отображаться признак работы приемника в режиме преобразования координат с указанием используемой системы, в которой выдаются координаты места.
4.4.2 КПО должен обеспечивать расчет, выдачу на индикацию и внешним потребителям углов пространственной ориентации диаметральной плоскости судна - курса, крена и дифферента при комплектации тремя приемниками и навигационными антеннами ГНСС или любых двух углов при комплектации двумя приемниками и антеннами ГНСС с индикацией углов ориентации до сотых долей градуса.
4.4.3 Встроенный в РКПО приемник корректирующей информации (ПКИ) должен обеспечивать прием и декодирование дифференциальной информации ГНСС ГЛОНАСС/GPS, передаваемой радиомаяками в диапазоне частот 283,5-315 кГц в Регионе 1 и в диапазоне 285-325 кГц в Регионах 2 и 3 в соответствии с [8].
4.4.4 Приемники сигналов систем ГЛОНАСС/GPS РКПО должны обеспечивать поиск и обработку сигналов спутников при изменении их уровней несущей частоты на входе от минус 130 дБм до минус 120 дБм, измеренных в полосе 3 дБ на выходе приемной антенны с линейной поляризацией.
После завершения поиска сигналов приемники должны обеспечивать слежение за сигналами спутников при понижении уровня сигналов несущей частоты до минус 133 дБм.
4.4.5 Приемник корректирующей информации должен обеспечивать работу в динамическом диапазоне изменения уровней принимаемых сигналов от 10 до 150 мВ/м.
В режиме слежения требуемый уровень сигнала должен быть не менее 10 мкВ/м. В режиме поиска сигнала требуемый уровень - 20 мкВ/м.
4.5 Требования к эксплуатационным характеристикам РКПО
4.5.1 Требования к приемнику сигналов ГНСС
В качестве приемника сигналов ГНСС в составе РКПО используется модуль приемовычислительный.
МПВ, по основным параметрам, должен соответствовать требованиям [2], [3], [4] и обеспечивать непрерывный режим работы и индикацию на дисплее основных и дополнительных данных, а также режимов работы:
- автоматического определения текущих углов ориентации диаметральной плоскости судна - курса, крена, дифферента;
- определений абсолютных координат по сигналам спутников ГНСС ГЛОНАСС;
- определений абсолютных координат по сигналам спутников ГНСС GPS;
- определений абсолютных координат по сигналам спутников ГНСС ГЛОНАСС/GPS (совмещенный режим работы);
- дифференциального режима с учетом поправок, принимаемых от широкозонных дифференциальных подсистем по каналу SBAS;
- дифференциального режима с учетом корректирующей информации от ККС;
- дифференциального режима с учетом поправок, передаваемых по УКВ каналу АИС базовыми станциями АИС;
- автоматического определения текущих параметров движения судна (путевой угол, путевая скорость);
- выдачу данных о времени, к которому они относятся в режиме абсолютных определений и в дифференциальном режиме;
- определение и индикацию вероятнейших (с учетом оценки ожидаемой точности) углов ориентации (курса, крена, дифферента) по серии навигационных определений на неподвижном основании (с заданными оператором установками, при которых навигационные определения считаются достоверными);
- выдачу на индикацию по выбору оператора координат места в виде географических координат (В, L, Н) или в виде плоских прямоугольных координат в проекции Гаусса - Крюгера (,
,
);
- выдачу по интерфейсу кода оцифровки метки времени и значения поправки на расхождение шкал времени ГНСС и UTC (SU) или UTC в зависимости от используемой ГНСС;
- ввод и учет при решении навигационной задачи корректирующей информации от ККС ЛДПС в формате RTCM SC-104;
- автономного контроля достоверности навигационных определений (RAIM).
4.5.2 Требования к встроенному приемнику корректирующей информации, используемого в составе РКПО
ПКИ, по основным параметрам, должен соответствовать требованиям [4] и обеспечивать индикацию на дисплее режимов работы:
- прием и декодирование корректирующей информации ГНСС ГЛОНАСС/GPS в диапазоне частот морских радиомаяков 283,5-315 кГц в Регионе 1 и в диапазоне 285-325 кГц в Регионах 2 и 3 в соответствии с требованиями [8];
- работу в условиях воздействия атмосферных шумов (включая местные грозы), искусственных помех, в том числе судовых и промышленных помех, а также Гауссовского шума;
- автоматического или ручного выбора частоты ККС;
- дискретности установки несущей частоты радиомаяка, передающего дифференциальные поправки 500 Гц;
- приема информации, передаваемой со скоростью 50, 100 и 200 Бод.
4.5.3 Выходные порты
РКПО должен обеспечивать через последовательные порты сопряжение и работу с навигационными комплексами и другими потребителями и иметь, по крайней мере, один выходной порт по стандарту RS 232 для передачи информации внешним потребителям.
Выходная информация о координатах должна быть в системе координат WGS-84 и использовать протокол обмена, определяемый [5].
Для передачи данных измерений должны использоваться навигационные предложения в соответствии с [5]:
Дополнительно, для связи с другими навигационными устройствами должны использоваться следующие предложения: GRS, GSA, GST, GSV.
Примечание - Предложения GRS, GSA, GST, GSV необходимы для поддержания режима внешней проверки целостности. Они должны быть синхронизированы по времени с соответствующими данными о координатах, определяемых навигационными предложениями GGА или GNS.
Допустимый темп выдачи навигационных предложений NMEA для скорости передачи данных 4800 Бод составляет:
- RMC, GGA, GLL,VTG, ZDA, HDT, ROT, PRDCU - 1 раз в с;
- GBS, DTM, GNS - 1 раз в 3 с (чередуются);
- GSA - 1 раз в 5 с;
- GSV - 1 раз в 20 с (в эту секунду совместно с GSV передаются только RMC, GGA, PRDCU).
4.5.4 Погрешность определения параметров в статическом и динамическом режимах работы
1) Погрешность измерений в статическом режиме работы по ГНСС ГЛОНАСС/GPS
МПВ в совмещенном режиме ГНСС ГЛОНАСС/GPS в составе РКПО должен обеспечивать в статическом режиме точность определения координат места, при которой координаты фазового центра антенны определяются с погрешностью, не превышающей 15 м для вероятности 95% и геометрического фактора (HDOP) не более 4.
Так как режим избирательного доступа выключен, погрешность в статическом режиме по GPS определяется величиной 13 м (для 95%), как определено спецификацией сигнала GPS в стандартном режиме работы (SPS) в соответствии с [17].
2) Погрешность измерений в дифференциальном режиме работы по ГЛОНАСС/GPS
Измерения координат местоположения должны производиться 1 раз в секунду на отрезке времени не менее 24 ч.
Погрешность разброса координат в горизонтальной плоскости не должна превышать 10 м для вероятности 95%. Горизонтальные координаты антенны должны быть известны с погрешностью до 0,5 м в системе координат, используемой для формирования дифференциальных поправок. Передаваемые дифференциальные поправки должны соответствовать требованиям [8].
3) Погрешность измерений при наклонениях антенн
Испытания в статическом режиме по 4.3.4 повторяются для условий наклонения антенны на ±22,5° (имитация качки судна) с периодом около 8 с [6]. Результаты измерений должны соответствовать данным, полученным по 4.5.4.1 и 4.5.4.2.
4.5.5 Погрешность измерений в динамическом режиме
1) Погрешность измерений в стандартном режиме работы ГНСС ГЛОНАСС/GPS
МПВ в совмещенном режиме ГНСС ГЛОНАСС/GPS в составе РКПО должен обеспечивать в динамическом режиме точность определения координат места, при которой координаты фазового центра антенны определяются с погрешностью, не превышающей 15 м для вероятности 95% и геометрического фактора HDOP не более 6, для состояния моря и условий плавания, встречающихся на судне и определяемых [6] и ГОСТ Р МЭК 60945. При отключенном режиме избирательного доступа точность в динамическом режиме по GPS составляет 13 м (для 95%), как определено спецификацией сигнала GPS в стандартном режиме работы (SPS).
2) Погрешность измерений в дифференциальном режиме работы ГЛОНАСС/GPS
Испытания по проверке точности в динамическом режиме работы должны проводиться в условиях, изложенных в [6]: Х-направление (бортовая качка) - 5 м/с и Y-направление (килевая качка) - 6 м/с
для всех классификаций окружающей среды.
3) Погрешность фазовых измерений
Инструментальная погрешность измерения фазы несущей не должна превышать 1 мм.
4) Точность определения углов пространственной ориентации судна
Погрешность измерений текущих значений углов пространственной ориентации с вероятностью 0,95 должна быть не более:
- курса судна 0,2°/;
- крена и дифферента 0,4°/,
где - длина антенной базы в метрах.
Примечание - Указанные величины погрешностей приведены для:
- полностью развернутых созвездий спутников ГНСС ГЛОНАСС и GPS и наличия в зоне видимости не менее 6 спутников ГЛОНАСС и/или GPS;
- углов возвышения спутников над горизонтом более 10°;
- нормального отношения сигнал/шум по каждому сигналу спутника;
- значений геометрического фактора HDOP6.
4.5.6 Погрешность определения путевого угла, скорости относительно грунта и времени UTC
РКПО должен обеспечивать расчет, представление на дисплей и выдачу на цифровой интерфейс данных о путевом угле, скорости перемещения относительно грунта и всемирного координированного времени. Такие выходные данные должны иметь отметку времени, привязанную к данным о местоположении.
Требования к точности для путевого угла и скорости относительно грунта должны быть не ниже соответствующих эксплуатационных требований, предъявляемых к гирокомпасам и устройствам для измерения скорости и пройденного расстояния в пределах ограничений измерений, обеспечиваемых по сравнению с требованиями данного стандарта.
Расчетные значения и выходные данные о путевом угле и скорости не предназначены для выполнения с помощью РКПО требований, касающихся гирокомпаса и устройств измерения скорости и пройденного расстояния в соответствии с [16].
1) Точность измерения путевого угла
Точность расчета путевого угла должна соответствовать требованиям к гирокомпасам, в соответствии с которыми "погрешность расчета путевого угла на любом курсе и на любой широте до 60° не должна превышать 0,75°·секанс широты".
Ошибка измерения путевого угла (линия перемещения координат антенны относительно грунта), обусловленная действительной скоростью судна относительно грунта, не должна превышать следующих величин.
Таблица 1 - Точность измерения путевого угла
Пределы изменения скорости, узлы | Точность COG, выдаваемого потребителям |
от 0 до | Ненадежна или непригодна |
от | ±3° |
| ±1° |
Вследствие ограничений, присущих приемникам ГНСС ГЛОНАСС/GPS, требования к ошибкам измерения путевого угла при маневрировании судна не включены. Данные ограничения должны быть показаны производителем аппаратуры в инструкции по эксплуатации.
2) Точность измерения скорости относительно грунта
Точность расчета скорости должна соответствовать требованиям к устройствам для измерения и индикации скорости и пройденного расстояния. В цифровом виде погрешность скорости не должна превышать 2% от истинной скорости или 0,2 узла, в зависимости, что больше.
3) Точность времени UTC
МПВ в составе РКПО должны обеспечивать выдачу внешним потребителям синхронизированной шкалы времени (секундной метки времени) с разрешением до 0,01 с. Метка времени в виде импульсного сигнала 1 Гц с возможностью выбора оператором режима синхронизации выдаваемой шкалы времени со шкалой времени ГНСС ГЛОНАСС, ГНСС GPS, UTC (SU) или UTC при работе МПВ по сигналам соответствующих ГНСС.
Метка времени цифрового интерфейса содержится в навигационном предложении GGA - координаты местоположения, определенные [5], и должна использоваться для подтверждения достоверности данных цифрового интерфейса о времени UTC, которое содержится в сообщении ZDA [5].
4.5.7 Поиск сигналов
Поиск сигналов определяется как процесс приема и обработки сигналов спутников ГЛОНАСС/GPS с целью определения параметров с требуемой точностью и дискретностью.
1) МПВ в составе РКПО должен:
- иметь 24 универсальных приемных каналов и обеспечивать возможность автоматического выбора и приема сигналов спутников, находящихся в зоне радиовидимости. Распределение каналов приема сигналов спутников ГНСС ГЛОНАСС, GPS и SBAS автоматическое или по командам управления внешнего интерфейса, задаваемое оператором в любой комбинации;
- обеспечивать выдачу углов пространственной ориентации судна (курса, крена, дифферента) с заданной погрешностью за время, не превышающее 60 с, после решения задачи определения координат местоположения. Требование выполняется при условии наличия в зоне видимости не менее 6 спутников ГЛОНАСС и/или GPS с углом возвышения над горизонтом более 10° и значения геометрического фактора HDOP6;
- обеспечивать возможность получения первого отсчета координат с требуемой точностью в течение 30 мин при отсутствии в памяти данных альманаха спутников;
- обеспечивать возможность получения первого отсчета координат с требуемой точностью в течение 5 мин при наличии в памяти данных альманаха спутников;
- осуществлять повторный поиск сигналов и расчет координат с требуемой точностью в течение 5 мин при прерывании приема сигналов на период до 24 ч, но без перерывов питающего напряжения;
- осуществлять повторный поиск сигналов и расчет координат с требуемой точностью в течение 2 мин при перерывах питающего напряжения до 60 с;
- осуществлять повторный поиск сигнала и его использование при определении координат в течение 10 с после блокировки в течение 30 с.
2) Встроенный приемник корректирующей информации должен:
- обеспечивать автоматический или ручной выбор частоты ККС дифференциальной подсистемы, а также индикацию данных о других доступных ККС, база данных о которых должна непрерывно обновляться и использоваться при их выборе;
- обеспечивать поиск и синхронизацию сигнала ККС при соотношении сигнал/помеха более 10 дБ и скорости передачи корректирующей информации 200 Бод в течение не более:
- 10 мин при отсутствии в памяти альманах данных ККС;
- 20 с в ручном режиме настройки приемника на частоту ККС;
- 20 с в автоматическом режиме настройки приемника на частоту ККС при наличии в памяти приемника альманаха данных о ККС;
- обеспечивать поиск и синхронизацию сигнала ККС в течение не более 45 с в условиях воздействия электрических помех;
- обеспечивать возможность использования данных с задержкой, не превышающей 100 мс после приема дифференциальных сообщений.
3) Начальные условия работы МПВ ГЛОНАСС/GPS в составе РКПО, при которых должны удовлетворяться указанные требования.
Условие А
Установка исходных данных требуется в тех случаях, когда РКПО:
- перемещается на большие расстояния (1000 км до
10000 км) при выключенном питании или отсутствии сигналов ГЛОНАСС/GPS;
- выключено на время более 7 сут;
- не принимает сигналы более 7 сут.
Условие Б
Перерывы питающего напряжения. При нормальной работе РКПО питание прерывается на время до 24 ч.
Условие С
Перерывы приема сигналов ГНСС ГЛОНАСС/GPS. При нормальной работе РКПО прекращается прием сигналов ГНСС на время до 24 ч, но без перерыва питающего напряжения.
Условие Д
Кратковременные перерывы напряжения питания на время, не превышающее 60 с.
Для любых начальных условий работы МПВ и обеспечения требуемого времени поиска сигналов, указанных в таблице 2, вмешательство оператора не требуется, за исключением включения напряжения питания и обеспечения минимального затенения антенн для уверенного приема сигналов систем ГЛОНАСС и GPS.
Таблица 2 - Предельное время поиска сигналов (мин)
Условие работы аппаратуры | А | Б | С | Д |
Предельное время поиска (мин) | 30 | 5 | 5 | 2 |
4.5.8 Дискретность выдачи данных
РКПО должен обеспечивать расчет углов курса, крена, дифферента и обсервованных координат с выдачей новых данных на дисплей и цифровой интерфейс с дискретностью не более 1 с. Минимальное разрешение отображаемых углов должно быть до 0,01°, а географических координат, т.е. широты и долготы, - до 0,001 мин.
Примечание - Для высокоскоростных судов выдача новых данных рекомендуется с дискретностью 0,5 с.
4.5.9 Меры защиты
1) Антенные входы и входные/выходные порты
В РКПО должны быть предусмотрены меры защиты, исключающие возможность повреждения аппаратуры в случаях короткого замыкания или заземления на корпус антенных входов или любых входных/выходных портов на время до 5 мин.
2) Конструкция антенн
Для уверенного приема сигналов спутников ГНСС и корректирующей информации ККС конструкция антенн и способы крепления должны обеспечивать удобство их установки на судне в таком месте, которое обеспечивает максимальный обзор в верхней полусфере и минимальное затенение судовыми конструкциями.
Конструкция антенн РКПО должна включать жесткую установочную раму для гарантированного обеспечения его технических характеристик.
Примечание - Допускается размещение антенн на свободной базе. Однако, заявленная точность определения углов ориентации и времени инициализации не гарантируется вследствие возможной нежесткости частей судна.
4.6 Требования к аппаратуре по электропитанию
Основное электропитание РКПО должно обеспечиваться через сетевой адаптер от сети однофазного переменного тока 50 Гц напряжением 220 В.
В качестве аварийного должен использоваться внешний источник электропитания постоянного тока напряжением 27 В, приведенном в [19], [20].
При пропадании основного питания РКПО должен автоматически переходить на аварийное питание без нарушения функционирования.
В аппаратуре должна быть предусмотрена защита от коротких замыканий и неправильного подключения источника электропитания.
4.7 Требования по устойчивости к внешним воздействиям
4.7.1 РКПО должен обеспечивать нормальное функционирование и соответствовать эксплуатационным требованиям ГОСТ Р МЭК 60945 в части механических и климатических воздействий, воздействий помех, электромагнитной совместимости, технического обслуживания, мер безопасности, маркировки оборудования.
Степень защиты
Аппаратура, устанавливаемая в закрытых помещениях (ходовой мостик), защищенных от попадания воды, должна обеспечивать степень защиты 1Р22. Антенны, устанавливаемые на открытой палубе судна должны обеспечивать степень защиты 1Р56, приведенной в [20], [21].
4.7.2 НАП, предназначенная для установки на судах, эксплуатируемых в условиях Арктики и Антарктики, должна выдерживать механические и климатические испытания на соответствие нормам, приведенным в [19], [20].
4.8 Требования по электромагнитной совместимости и помехозащищенности аппаратуры
РКПО должен разрабатываться с учетом требований по создаваемым электромагнитным и радиопомехам, а также обеспечивать ЭМС на борту судна.
Должны быть предусмотрены меры защиты, исключающие возможность повреждения антенного устройства от воздействия электромагнитных помех на входе антенны, входных и выходных соединений, в соответствии с требованиями ГОСТ Р МЭК 60945 по помехоустойчивости и ЭМС.
РКПО должен обеспечивать работу в любых условиях эксплуатации морских и речных судов при воздействии факторов в соответствии нормам, приведенным в ГОСТ Р МЭК 60945, [19], [20], [21].
Уровни создаваемых индустриальных помех в цепях электропитания, а также внешних электромагнитных полей должны удовлетворять требованиям ГОСТ 28279-89. РКПО не должен распространять помехи выше норм, приведенных в [19], [20], [21].
В условиях воздействия на входе помех РКПО должен обеспечивать нормальное функционирование и удовлетворять требованиям настоящего стандарта.
Уровень создаваемого во время работы акустического шума не должен превышать 60 дБ.
4.9 Типичная помеховая обстановка (см. приложение А)
Радионавигационный комплекс пространственной ориентации углов вектора положения судна должен обеспечивать нормальное функционирование в условиях воздействия типичных помех.
Данные приведены в приложении А (А.1), а порядок испытаний - в приложении А (А.2).
4.10 Другие требования
4.10.1 Предупреждения о неисправностях и индикация состояния
РКПО должен обеспечивать автоматический контроль и диагностику функционирования, а также индикацию о неисправности, если рассчитанные углы ориентации судна не отвечают требованиям настоящего стандарта.
РКПО должен обеспечивать, как минимум, индикацию в течение 5 с, если:
- геометрический фактор HDOP превысил установленный предел;
- новые координаты места рассчитаны за время, превышающее 1 с;
- появляется предупреждение о невозможности определения координат;
- определен статус дифференциального режима работы системы ГЛОНАСС (ДГЛОНАСС) и системы GPS (DGPS) при приеме сигналов дифференциальных поправок и их использования в отображаемых координатах места судна;
- представление на экране текстового сообщения ДГЛОНАСС/DGPS, предаваемое контрольно-корректирующей станцией.
Примечание - Для высокоскоростных судов выдача новых данных рекомендуется с дискретностью 0,5 с.
До восстановления нормальной работы РКПО на дисплее должны отображаться время и координаты последней правильной обсервации с визуальной индикацией признака прекращения обсерваций.
4.10.2 Использование RAIM для контроля целостности
РКПО должен включать алгоритм контроля целостности для обнаружения неисправностей, например RAIM или подобные средства, позволяющие определить, что точность определения углов ориентации и координат места отвечают данным эксплуатационным требованиям настоящего стандарта и обеспечивают индикацию контроля целостности.
Для текущих значений принятых уровней точности определения места с доверительной вероятностью 95% индикация может выражаться в виде трех состояний: "безопасное", "предупреждение" и "опасное". Уровни точности должны включать значения 10 м и 100 м. Могут обеспечиваться также дополнительные уровни точности. Для индикации состояний производитель аппаратуры может использовать различные цвета. Если это предусмотрено, необходимо использовать следующие цвета: зеленый - "безопасное", желтый - "предупреждение" и красный - "опасное".
"Безопасное" и "опасное" состояния используются для представления результатов расчета контроля целостности по отношению к индицируемому порогу точности, который соответствует режиму работы судов 10 м или 100 м, как определено [10].
"Предупреждение" используется для индикации такого положения, когда для надежного расчета целостности с доверительной вероятностью 95% информации недостаточно.
Вероятность ложной тревоги 5% или вероятность ошибочного определения координат
5% должны приводить к включению индикации "предупреждение".
Состояние целостности должно непрерывно отображаться совместно с индикацией выбранного уровня точности. Должна обеспечиваться возможность передачи состояния о целостности в другие навигационные устройства в соответствии с требованиями о выходных данных.
4.10.3 Использование дифференциального режима работы для контроля целостности систем ГЛОНАСС/GPS
МПВ и ПКИ в составе РКПО должны обеспечивать, как минимум, контроль состояния и целостность систем ГЛОНАСС и GPS, используя корректирующую информацию дифференциальной подсистемы.
Если PRC и RRC до спутника выходят за пределы, которые определены в [8], передаваемые диффподсистемой навигационные сообщения типа 1, 9, 31 и 34 будут являться индикацией, что данный спутник не должен использоваться для определений.
ПКИ должен обеспечивать, как минимум, индикацию целостности дифференциальных подсистем ДГЛОНАСС, DGPS и аварийное их состояние.
В дифференциальном режиме работы РКПО должен индицировать информацию о целостности дифференциальной подсистемы, если:
- поправки ДГЛОНАСС или DGPS не принимаются в течение 30 с;
- в ручном или автоматическом режиме выбора номера ККС данная станция неисправна, не контролируется или качество сигнала поправок ниже установленного порога.
4.10.4 Требования по эксплуатации, техническому обслуживанию и ремонту
После включения РКПО должен автоматически перейти в режим "Контроль", а затем в режим "Навигация" по ГНСС ГЛОНАСС и/или ГЛОНАСС/GPS в дифференциальном режиме.
В РКПО должны быть предусмотрены меры защиты от ошибочных действий оператора. Аппаратура не должна требовать ограничений по времени непрерывной работы.
РКПО должен обеспечивать возможность его установки на объектах собственными силами заказчика без дополнительных регулировок, а также не должен требовать специального постоянного обслуживания. В аппаратуре должны быть предусмотрены меры, исключающие возможность потери данных, хранящихся в постоянной памяти процессора.
Использование, техническое обслуживание и текущий ремонт РКПО должны осуществляться методом замены конструктивно-сменного устройства собственными силами заказчика средней квалификации с применением штатных средств контроля и диагностики.
4.10.5 Средство отображения информации
1) Дисплей должен иметь достаточное разрешение, чтобы оператор мог различать все элементы и коды, отображаемые на дисплее, с максимального предусмотренного расстояния. Фон дисплея должен иметь оттенок, позволяющий легко рассматривать представленную информацию.
2) Информация на дисплее должна легко читаться в дневной и ночной периоды суток.
3) При необходимости выбора цвета для кодирования некоторых наиболее важных данных эти цвета должны быть легко различимы.
4) Для индикации параметров на дисплее должен использоваться четкий и разборчивый комплект символов, имеющих соответствующее начертание знаков, единый формат, ширину строки, а также высоту цифр и букв.
5) Если используются сокращения или акронимы (сочетания начальных букв нескольких слов), они должны быть понятны, часто использоваться на практике, а их количество сведено к минимуму.
6) Отображаемые параметры должны иметь общепринятые сокращения и обозначения.
Дисплей должен обеспечивать вывод информации как в буквенно-цифровом так и графическом виде.
7) При увеличении графического изображения по сравнению с обычным размером должен указываться масштаб увеличения.
При необходимости нанесения дополнительных линий они не должны затенять элементы данных, например линия заданного пути, маршрутные точки и т.д.
5 Требования к метрологическому обеспечению
5.1 Проведение испытаний для утверждения типа и первичных поверочных испытаний
5.1.1 В процессе испытаний для утверждения типа РКПО должен выдерживать первичные поверочные испытания, по результатам которых должны быть установлены основные метрологические характеристики, такие как пределы допускаемых погрешностей измерений углов курса, крена, дифферента, а также координат, скорости, путевого угла, времени.
5.1.2 Испытания для утверждения типа и первичная поверка РКПО должны осуществляться организациями, аккредитованными на соответствующие виды деятельности в установленном порядке.
5.2 Проведение периодической поверки РКПО
5.2.1 Все РКПО, применяемые на судах, подлежат периодической поверке в процессе эксплуатации.
5.2.2 Периодическая поверка РКПО должна проводиться ежегодно и совмещаться с проведением работ по техническому обслуживанию (ремонту) судовой аппаратуры.
5.2.3 Допускается проводить периодическую поверку РКПО в гарантийный период эксплуатации.
5.2.4 Периодическая поверка РКПО должна проводиться на специализированных постах преимущественно без демонтажа РКПО с судна.
5.3 Требования к средствам поверки
5.3.1 При поверке разрешается использовать средства поверки, обеспечивающие соотношение допускаемой погрешности измерений по отношению к поверяемому РКПО не более 1:3.
5.3.2 Все средства измерений и рабочие эталоны, применяемые при поверке, должны быть поверены и иметь свидетельства о поверке с неистекшим сроком действия на время проведения поверки или оттиск поверительного клейма на приборе или в документации.
6 Методы испытаний и требуемые результаты
6.1 Общие условия измерений
Все проверки оборудования РКПО, предъявленного для испытаний, производятся на соответствие требованиям ГОСТ Р МЭК 60945, [19], [20], [21]. Оборудование должно соответствовать требованиям данной категории оборудования, т.е. "защищенное", устанавливаемое в закрытых помещениях, и "не защищенное", предназначенное для установки на открытой палубе, например антенны.
Разработчик аппаратуры должен заявить, какой тип аппаратуры или блоки относятся к категории "защищенные", а какие "не защищенные". Разработчик до начала испытаний должен также оговорить, если требуется, особые условия окружающей среды при проведении проверок.
6.1.1 Последовательность испытаний
Последовательность проведения испытаний не определяется. До начала испытаний последовательность испытаний согласовывается между испытательной лабораторией и поставщиком оборудования.
Различные пункты программы испытаний могут выполняться одновременно. Разработчик вместе с аппаратурой должен представить полный комплект технической документации.
Необходимо предусмотреть дополнительные данные для обеспечения выполнения отдельных пунктов программы испытаний, которые в нормальной работе оборудования не используются, например способы стирания альманаха данных, при проведении испытаний по 4.5.7.
6.1.2 Стандартные сигналы при проведении испытаний
Целью испытаний является подтверждение, что параметры РКПО соответствуют требованиям стандарта, изложенным в разделе 4, путем проведения проверок для различных условий окружающей среды.
В связи со сложностью получения одинаковых характеристик для различных используемых имитаторов сигналов, трудностью установления единообразных, имитируемых сигналов, данные испытания должны проводиться с использованием реальных сигналов систем ГЛОНАСС и GPS.
При испытаниях могут использоваться другие методы имитации сигналов, при условии, что имитатор вырабатывает сигналы, идентичные сигналам систем ГЛОНАСС и GPS, включает устройство имитации шума, обеспечивает требуемый уровень сигнала спутника и формирование оптимального созвездия спутников.
Формулировка проверка характеристик является укороченной версией испытаний точности в статическом режиме, когда необходимо выполнить минимум 100 измерений за время 5-10 минут, исключая результаты измерений с геометрическим фактором HDOP6.
Координаты антенн ГНСС в составе РКПО должны быть определены с погрешностью 1 м для вероятности 95%.
6.1.3 Оценка погрешностей измеряемых параметров
В процессе определения точности измеряемых параметров необходимо учитывать геометрический фактор используемого созвездия HDOP.
Если величина HDOP6, условия испытаний нормальные. При HDOP
6 измерения могут быть недостоверными, и необходимо прервать испытания до установления требуемой величины HDOP.
Испытания проводят для подтверждения, что углы ориентации, измеренные РКПО в статических и динамических условиях работы, соответствуют или лучше характеристик, изложенных в стандарте требований к аппаратуре.
При использовании имитатора сигналов порог HDOP должен быть 6. Антенны приемников сигналов ГНСС должны размещаться в соответствии с рекомендациями разработчика по их установке.
Антенны необходимо монтировать в таком месте, где обеспечивается возможность приема сигналов от спутников с любых направлений, с углами возвышения над горизонтом выше 10°.
Местоположение антенны в системе координат WGS-84 должно быть известно с точностью не хуже 1 м для трехмерных координат. Максимальные длины кабелей в процессе испытаний должны соответствовать требованиям разработчика.
При испытаниях в статическом режиме должны использоваться реальные сигналы ГЛОНАСС/GPS.
6.2 Методика проверки точности РКПО при измерении углов пространственной ориентации
1) Условия при проведении испытаний
Все испытания РКПО должны проводиться в нормальных условиях, которые определяются следующими параметрами:
- температура 10 °С - 30 °С;
- относительная влажность в пределах от 20% до 75%.
В случае, когда испытания проводятся в условиях, которые отличаются от условий указанных выше, в акте испытаний необходимо указать реальные значения температуры и относительной влажности.
Части оборудования, относящиеся к классу X, предназначенные для установки на открытой палубе (например, антенны МПВ и ПКИ), должны испытываться при условиях окружающей среды в соответствии с ГОСТ Р МЭК 60945 (класс X).
2) Место проведения испытаний
Измерения проводятся на эталонированном испытательном стенде, включающем поворотное устройство и теодолит.
Тумба поворотного устройства устанавливается на открытой площадке. На расстоянии порядка 10 м от поворотного устройства жестко закрепляются маркеры (места крепления антенн ГНСС).
Маркеры и место, соответствующее оси вращения поворотного устройства, должны предусматривать возможность крепления антенн МПВ. Одна антенна размещается на точке оси вращения поворотного устройства, вторая - на маркере определяемого эталонного направления.
Продольная ось устанавливается так, чтобы она проходила через фазовые центры антенн, т.е. для оценки угла курса используется азимут, определяемый антенной базой компаса.
Стандартная точность определения длины базы должна составлять 1 мм. Это достигается в статическом режиме работы путем накопления данных измерений в течение одного часа. При расстоянии между антеннами, определяющими эталонное направление в 10 м, точность определения угла составит порядка 0,01°. Данная величина погрешности определения направления является достаточной для использования в качестве эталона при оценке погрешностей измерения углов курса, крена и дифферента.
Точность определения угла (азимута) при антенной базе 1 м должна составлять около 0,2°.
Для повышения достоверности данных измерений на испытательном стенде могут устанавливаться несколько маркеров с определенными эталонными направлениями.
6.3 Результаты испытаний
6.3.1 Проверяется комплектация РКПО и документация, представленная разработчиком.
6.3.2 Выходные данные
При испытаниях РКПО индицируемые углы пространственной ориентации судна и координаты местоположения должны соответствовать виду, который представлен в документации разработчика.
6.3.3 Выходная информация
Информация на выходе РКПО, для внешнего обмена данных, должна соответствовать [5]. Оценка производится на основе проверки технической документации и электрических стыков.
6.3.4 Точность определения координат места
1) Стандартный режим работы ГНСС в статике
Период наблюдений при измерении координат должен составлять не менее 24 ч. В совмещенном режиме работы по ГНСС ГЛОНАСС/GPS погрешность разброса координат в горизонтальной плоскости не должна превышать 15 м для вероятности 95%, исключая измерения, полученные при значениях геометрического фактора HDOP6.
2) Дифференциальный режим работы ГЛОНАСС/GPS
Измерения координат местоположения производятся с дискретностью 1 раз в секунду на отрезке времени не менее 24 ч.
Погрешность разброса координат в горизонтальной плоскости не должна превышать 10 м для вероятности 95%.
Горизонтальные координаты антенны должны быть известны с погрешностью до 0,5 м в системе координат, используемой для формирования дифференциальных поправок. Передаваемые дифференциальные поправки должны соответствовать требованиям [8].
3) Наклонения антенны
Испытания в статическом режиме по 4.5.4 повторяются при наклонениях антенны на ±22,5° (имитация качки судна) с периодом около 8 с [6].
Результаты измерений должны соответствовать данным, полученным по 4.5.4.1 и 4.5.4.2.
4) Динамический режим работы
Стандартный режим работы ГЛОНАСС/GPS
Испытания по проверке точности в динамическом режиме работы должны проводиться в условиях, изложенных в [6]: X-направление (бортовая качка) - 5 м/с и Y-направление (килевая качка) - 6 м/с
для всех классификаций окружающей среды.
При использовании имитатора сигналов его характеристики должны точно соответствовать требуемым параметрам сигналов. Результаты испытаний должны соответствовать следующим данным, приведенным в перечислениях а) и б).
а) после полной синхронизации по сигналам ГНСС РКПО перемещается по прямой линии, как минимум, 1,2 мин со скоростью (48±2) узла. После снижения скорости в течение 5 с до 0 узлов, через 10 с после полной остановки погрешность измерений координат не должна превышать ±13 м относительно координат неподвижной точки;
б) после полной синхронизации по сигналам ГНСС РКПО в течение времени не менее 2 мин перемещается по прямой линии на расстояние не менее 100 м со скоростью (24±1) узла. Используется метод сглаживания координат при уклонении в любую сторону от линии пути на расстояние более 2 м с периодом 11-12 с. Приемники сигналов ГНСС не должны терять синхронизацию и продолжать рассчитывать углы ориентации и координаты в пределах полосы 30 м относительно центральной линии направления движения.
Для методов испытаний, указанных в перечислениях а) и б), установившиеся координаты определяются одним из следующих методов:
- в конце отрезка пути устанавливается аппаратура ГНСС, характеристики которой идентичны испытываемой, а погрешность определяется путем сравнения координат;
- путем подачи на вход РКПО опорного сигнала от имитатора.
Дифференциальный режим работы ГЛОНАСС/GPS
Испытания по проверке точности в динамическом режиме работы должны проводиться в условиях, изложенных в [6]: X-направление (бортовая качка) - 5 м/с и Y-направление (килевая качка) - 6 м/с
для всех классификаций окружающей среды.
При использовании имитатора сигналов его характеристики должны точно соответствовать требуемым параметрам сигналов.
Результаты испытаний должны соответствовать следующим приведенным ускорениям:
- после полной синхронизации по сигналам ГНСС РКПО перемещается по прямой линии, как минимум, 1,2 мин со скоростью (48±2) узла. После снижения скорости в течение 5 с до 0 узлов, через 10 с после полной остановки погрешность измерений координат не должна превышать ±10 м относительно координат неподвижной точки, а через 10 с после полной остановки погрешность должна быть в пределах ±2 м;
- при использовании имитатора характеристики имитируемых сигналов должны соответствовать ИКД ГЛОНАСС/GPS.
Для всех методов испытаний, указанных выше, истинные и установившиеся координаты определяются:
- путем усреднения 15-и последовательных отсчетов координат, следующих после 10 с периода установления, а истинные координаты в точке остановки должны измеряться с точностью 1 м;
- путем подачи на вход сигнала от имитатора, обеспечивающего точность в пределах 1 м.
6.3.5 Точность определения углов пространственной ориентации
6.3.5.1 Определение погрешности измерения угла курса (азимута) в статическом режиме при фиксированной антенной базе
Требуемые результаты
Погрешность измерений текущих значений курсового угла должна быть не более 0,2°/, где
- длина антенной базы в метрах.
Методика измерений
Провести подготовительные работы испытательного стенда.
Антенны РКПО установить на поворотном устройстве. Длина антенной базы должна составлять 1 м.
С использованием теодолита ориентировать антенны вдоль известного эталонного направления, которое заранее определено.
Зафиксировать эталонное значение направления поворотного устройства испытательного стенда.
Включить РКПО и убедиться, что произошла инициализация задачи выработки параметров угловой ориентации, а на индикаторе отображаются текущие значения курсового угла.
Провести измерения в статическом положении антенной системы длительностью не менее 1 ч. Запись данных измерений осуществляется на компьютере с дискретностью 1 с. Произвести расчет СКП определения угла курса по следующей методике.
Средние значения погрешностей измерения углов пространственной ориентации в статике вычисляется по формулам
 , (1)
, (1)
где ![]() ;
; ![]() ,
,
- текущее значение
-го угла пространственной ориентации, измеренное РКПО;
![]() - значение
- значение -го угла пространственной ориентации, измеренное автономными средствами на эталонированном испытательном стенде;
![]() - известная постоянная систематическая погрешность автономных средств измерения;
- известная постоянная систематическая погрешность автономных средств измерения;
- число измерений.
Среднеквадратическая погрешность (СКП) измерений углов пространственной ориентации определяется по формуле
 . (2)
. (2)
Пересчет СКП на эквивалентную антенную базу длиной 1 м осуществляется по формуле
![]() , (3)
, (3)
где - длина эквивалентной базы по
-му углу пространственной ориентации.
Погрешность измерений угла курса не должна превышать значения, заявленного в технических условиях на РКПО.
6.3.5.2 Определение погрешности измерения угла курса от длины антенной базы
Требуемые результаты
Погрешность измерений текущих значений курсового угла должна быть не более 0,2°/, где
- длина антенной базы в метрах.
Методика измерений
Оцениваемые характеристики:
- зависимость предельной и СКП погрешности измерения угла курса от длины антенной базы.
Используемое оборудование:
- технологическая испытательная площадка на открытой местности;
- устройство для крепления антенн, которое обеспечивает их неподвижность в течение времени испытаний;
- РКПО со свободной антенной базой;
- источник питания;
- персональный компьютер с программным обеспечением;
- теодолит и рулетка.
За истинное значение принимается курс, получаемый либо путем усреднения измерений при наибольшей длине антенной базы, или эталонное направление, полученное на испытательном стенде.
Эталонное значение угла курса определяется с использованием методики, указанной в 6.3.5.1. Допускается меньшая длительность сеанса наблюдений. При последовательном изменении длины антенной базы сохранение эталонного направления обеспечивается при помощи теодолита.
Предварительно теодолит устанавливается по заданному направлению с помощью маркеров на антеннах РКПО.
Производится изменение длины антенной базы путем установки с помощью теодолита антенны вдоль заданного направления по маркерам. Для установленной длины антенной базы осуществляются измерения курса. Расчет СКП определения угла курса производится по методике, указанной в 6.3.5.1.
Определяется минимальная длина антенной базы, при которой точность определения курса (азимута) будет удовлетворять требуемым значениям.
6.3.5.3 Определение погрешности измерения угла курса и крена при повороте антенной системы в плоскости горизонта
Требуемые результаты. Погрешность измерений текущих значений курсового угла должна быть не более 0,2°/, а крена 0,4°/
,
где - длина антенной базы в метрах.
Методика измерений
Оцениваемые характеристики: зависимость предельной и СКП погрешности измерения угла курса и крена.
Используемое оборудование:
- технологическая испытательная площадка на открытой местности, устройство с жестким креплением антенной системы, обеспечивающим ее поворот в горизонтальной плоскости и неподвижность в фиксированном положении;
- РКПО;
- источник питания;
- персональный компьютер с программным обеспечением;
- теодолит и рулетка.
Расположить антенны РКПО на поворотном устройстве. Длина антенной базы должна составлять 1 м. С помощью теодолита ориентировать антенны вдоль известного эталонного направления и зафиксировать его значение.
Включить аппаратуру и убедиться, что РКПО вырабатывает параметры угловой ориентации, на индикаторе отображаются текущие значения курсового угла. Произвести запись измерений угла курса на компьютер.
Дальнейшая методика проведения испытаний заключается в последовательном определении угла курса для различных значений угла крена (поворот антенной системы в плоскости горизонта). Угол крена относительно предыдущей ориентации антенной системы определяется с помощью теодолита. Запись измеренных параметров осуществляется на компьютере. Статистические оценки получаются путем сравнения измеренных значений с эталонным значением угла поворота.
Создать крен, повернув антенную систему на некоторый угол, в плоскости горизонта, не выключая аппаратуру и не прерывая записи выходных параметров на компьютер. Убедиться, что на индикаторе текущие значения угла крена изменились.
С помощью теодолита определить угол поворота антенной системы относительно эталонного направления. Результаты занести в протокол. Повторить измерения по данной методике несколько раз для различных значений углов крена правого и левого бортов.
Произвести расчет СКП определения угла курса и крена по измеренным данным и методике расчета СКП, указанной в 6.3.5.1. Аппаратуру считать выдержавшей испытания, если СКП не превышает значения, указанного в технических условиях на РКПО.
6.3.5.4 Определение погрешности измерения угла курса и дифферента при повороте антенной системы в плоскости, перпендикулярной плоскости горизонта
Требуемые результаты
Погрешность измерений текущих значений курсового угла должна быть не более 0,2°/, а дифферента 0,4°/
,
где - длина антенной базы в метрах.
Методика измерений
Оцениваемые характеристики: зависимость предельной и СКП погрешности измерения угла курса и дифферента.
Используемое оборудование:
- технологическая испытательная площадка на открытой местности, устройство с жестким креплением антенной системы, обеспечивающим ее поворот в плоскости, перпендикулярной плоскости горизонта, создавая дифферент и неподвижность в фиксированном положении;
- РКПО;
- источник питания;
- персональный компьютер с программным обеспечением;
- теодолит и рулетка.
Расположить антенны РКПО на поворотном устройстве. Длина антенной базы должна составлять 1 м. С помощью теодолита ориентировать антенны вдоль известного эталонного направления и зафиксировать значение.
Включить аппаратуру и убедиться, что РКПО вырабатывает параметры угловой ориентации, на индикаторе отображаются текущие значения курсового угла. Произвести запись измерений угла курса на компьютер.
Дальнейшая методика проведения испытания заключается в последовательном определении угла курса для различных значений угла дифферента (поворот антенной системы в плоскости, перпендикулярной плоскости горизонта). Угол дифферента относительно предыдущей ориентации антенной системы определяется с помощью теодолита. Запись измеренных параметров осуществляется на компьютере. Статистические оценки получаются путем сравнения измеренных значений с эталонным значением угла поворота.
Создать дифферент, повернув антенную систему на некоторый угол в плоскости, перпендикулярной плоскости горизонта, не выключая аппаратуру и не прерывая записи выходных параметров на компьютер. Убедиться, что на индикаторе текущие значения угла дифферента изменились.
С помощью теодолита определить угол поворота антенной системы относительно эталонного направления. Результаты занести в протокол. Повторить измерения по данной методике несколько раз для различных значений углов дифферента на нос и на корму. Произвести расчет СКП определения угла курса и дифферента по измеренным данным и методике расчета СКП, указанной в 6.3.5.1.
Аппаратуру считать выдержавшей испытания, если СКП не превышает значения, заявленного в технических условиях на РКПО.
6.3.6 Поиск сигналов
Требуемые результаты
1) Условие А
Первоначальная установка исходных данных.
Проверка данного параметра производится следующими способами:
- вводом начальных ошибочных координат точки, удаленной от места испытаний на расстояние 1000 км, но не более 10000 км;
- отключение РКПО от сети питающего напряжения на время 7 суток.
Проверка характеристик должна выполняться после истечения предельного времени, указанного в таблице 1.
2) Условие Б
Перерывы питающего напряжения.
РКПО отключается от сети питающего напряжения на время 24-25 ч.
3) Условие В
Перерывы приема сигналов систем ГЛОНАСС/GPS.
При нормальной работе РКПО производится полное затенение антенн для приема сигналов спутников на время 24-25 ч. Проверка характеристик должна выполняться после истечения предельного времени, указанного в таблице 1.
4) Условие Г
Кратковременные перерывы питающего напряжения.
При нормальной работе РКПО производится прерывание питающего напряжения на время 60 с. После этого питание РКПО восстанавливается.
Проверка характеристик производится по истечении промежутка времени, указанного в таблице 1.
Методики проверки времени получения первой обсервации
Проверяется возможность автоматического поиска сигналов, излучаемых спутниками для определения углов пространственной ориентации судна с требуемой точностью и дискретностью. Время первой обсервации проверяется для следующих условий работы РКПО:
- отсутствия в памяти приемников альманаха данных спутников;
- наличия в памяти приемников альманаха данных спутников;
- при перерывах приема сигналов, но без перерыва питающего напряжения;
- при перерывах питающего напряжения на время не более 60 с.
Для каждого из условий работы производится включение РКПО и с помощью секундомера фиксируется время, необходимое для измерения координат с требуемой точностью. Время получения первой обсервации не должно превышать значений, указанных в таблице 2.
Аппаратуру считать выдержавшей испытания, если она удовлетворяет требованиям, указанным в 4.5.7.1-4.5.7.3.
6.3.7 Меры защиты
Антенный вход и входные/выходные порты
6.3.7.1 Проверяются меры защиты, предусмотренные в РКПО, исключающие возможность повреждения в случаях короткого замыкания или заземления на корпус антенного входа или любых входных/выходных портов.
6.3.7.2 Антенные входы приемников и входной/выходной порт соединяются с землей на время до 5 мин. В конце этого периода антенны и входные/выходные порты подключаются штатно и проверяются характеристики РКПО с целью обнаружения повреждений.
6.3.7.3 Аппаратуру считать выдержавшей испытания, если она удовлетворяет требованиям 6.3.7.1-6.3.7.2.
6.3.8 Электромагнитная совместимость
Испытания выполняются по методике, изложенной в ГОСТ Р МЭК 60945, с целью проверки соответствия требованиям [19], [20], [21].
6.3.9 Конструкция антенн
Конструкция антенн ГНСС в составе РКПО проверяется на соответствие технической документации, представленной разработчиком.
Проверка касается определения возможности установки антенн в месте, где обеспечивается уверенный прием сигналов созвездия спутников систем ГЛОНАСС/GPS с любых направлений. Антенная конструкция РКПО должна включать жесткую установочную раму для гарантированного обеспечения его технических характеристик.
Аппаратуру считать выдержавшей испытания, если конструкция антенн позволяет их установку на судне в таком месте, которое обеспечивает хорошую видимость созвездия спутников.
6.3.10 Чувствительность и динамический диапазон
Поиск сигналов
При проверке РКПО уровни принимаемых сигналов контролируются с помощью специального приемника. Должна быть предусмотрена возможность регулировки их уровней в диапазоне (минус 125±5) dBm. Проверяются характеристики, которые должны удовлетворять требованиям стандарта при данном изменении уровня сигналов.
Встроенный ПКИ должен обеспечивать работу в динамическом диапазоне принимаемых сигналов от 10 мкВ/м до 150 мкВ/м. В режиме поиска сигнала требуемый уровень 20 мкВ/м.
Данные проверки могут также выполняться с помощью имитатора.
Слежение
Уровни сигналов контролируются с помощью специального приемника. Должна быть предусмотрена возможность подавления сигналов и регулировки их уровней до величины минус 133 dBm. Характеристики МПВ должны удовлетворять требованиям при данном изменении уровня сигналов.
В режиме слежения требуемый уровень сигнала на входе ПКИ 10 мкВ/м.
Данная проверка может также выполняться с помощью имитатора.
6.3.11 Влияние характерных сигналов помех
6.3.11.1 Помехи в L диапазоне частот
При нормальной работе антенны РКПО подвергаются облучению на частоте 1636,5 МГц с плотностью потока мощности 3 Вт/м на время 10 мин. Когда воздействие мешающего сигнала прекращается и осуществляется нормальный прием сигналов ГЛОНАСС/GPS, МПВ должен через 5 мин обеспечить расчет углов пространственной ориентации и координат места без вмешательства оператора. После прекращения воздействия мешающего сигнала, производится проверка характеристик РКПО.
Примечание - Это эквивалентно облучению антенн ГЛОНАСС/GPS сигналом от антенны спутниковой системы связи ИНМАРСАТ, установленной на расстоянии 10 м вдоль ее электрической оси.
6.3.11.2 Помехи в S диапазоне частот
При нормальной работе антенны ГНСС РКПО подвергаются облучению пачкой из 10 импульсов, каждый длительностью 1-1,5 мкс с частотой следования 1600:1, в диапазоне частот 2,9-3,1 ГГц и плотностью потока мощности 7,5 кВт/м. Время облучения 10 мин с периодом повторения пакетов импульсов 3 с.
Когда воздействие мешающего сигнала прекращается и осуществляется нормальный прием сигналов ГЛОНАСС/GPS, РКПО должен через 5 мин обеспечить расчет координат места без вмешательства оператора. После прекращения воздействия мешающего сигнала производится проверка характеристик спутникового компаса.
Примечание - Эти условия эквивалентны воздействию излучения РЛС с мощностью сигнала 60 кВт в S/диапазоне морских РЛС, длительностью импульса 1,2 мкс с частотой повторения 600 импульсов в сек, использующей 4-метровую щелевую антенну со скоростью вращения 20 оборотов/мин, при размещении антенн ГНСС вдоль электрической оси антенны РЛС на расстоянии 10 м от центра вращения.
6.3.12 Частота обновления координат местоположения
6.3.12.1 Частота обновления координат для малых скоростей движения
РКПО размещается на платформе, которая движется по прямой линии со скоростью (5±1) узел. В течение 10 мин проверяются выходные координаты с интервалами 10 с. Выходные координаты должны каждый раз обновляться. Данная проверка может выполняться с использованием имитатора.
6.3.12.2 Частота обновления координат для высоких скоростей движения
РКПО размещается на платформе, которая движется по прямой линии со скоростью (50±5) узлов. Выходные координаты должны проверяться с интервалами 2 с в течение 10 мин. Выходные координаты должны каждый раз обновляться. Данная проверка может выполняться с использованием имитатора.
Минимальное разрешение отображаемых географических координат, т.е. широты и долготы, оценивается в процессе проверки по 6.3.4.1-6.3.4.4.
6.3.13 Дифференциальный вход
Документация разработчика должна быть проверена с целью подтверждения:
- что РКПО правильно обрабатывает сообщения, определяемые протоколом, который представлен в [8] в случае, когда морские радиомаяки используются как средство для передачи дифференциальных поправок, и
- что сигналы ДГЛОНАСС/DGPS принимаются, а статус дифференциального режима индицируется на дисплее. Дифференциальные поправки ДГЛОНАСС/DGPS учитываются в отображаемых координатах места.
6.3.14 Предупреждения об отказах и статус индикации
Предупреждения об отказах и статус индикаторов фиксируются при проверке статических и динамических характеристик. Они должны соответствовать условиям, которые индицируются на дисплее РКПО.
Испытания по расчету целостности
Для стабилизации временного интервала, на котором производится проверка целостности, РКПО устанавливается в режим слежения за спутниками на время 10 мин. Используя 5 спутников, целостность может быть оценена в дифференциальном режиме работы с помощью изменения величины поправки для одного из спутников путем увеличения скорости изменения поправки. Эта введенная ошибка должна приводить к ухудшению точности обсервации. Процедура выполняется до тех пор, пока ошибка координат места не станет больше, чем установленный уровень точности.
Индикаторы контроля целостности будут индицировать состояние и переходить от "безопасного" к "предупреждению", а затем к "опасному" состоянию. Для определения совпадения с требованиями по целостности данные сравниваются с истинной ошибкой местоположения на эти моменты.
Проводятся 10 сеансов измерений путем введения ошибок для различных спутников. Выполняются 2 сеанса наблюдений, разделенных по времени на 3 ч, что считается достаточным для проверки функции целостности.
Испытания могут проводиться с использованием имитатора сигналов путем изменения метки времени в спутнике.
При использовании созвездия спутников от имитатора необходимо использовать текущий альманах, чтобы имитировать реальное созвездие спутников.
Проверка целостности дифференциальной подсистемы
РКПО должен работать в дифференциальном режиме ДГЛОНАСС/DGPS. Приемник поправок должен работать в ручном режиме выбора частоты контрольно-корректирующей станции.
Следует подключить контрольный сигнал А на вход РКПО.
Проверить работу и убедиться, что РКПО работает в дифференциальном режиме определения координат (т.е. анализируется поток данных навигационного предложения GGA и установлен режим "GPS=2").
Выключить контрольный сигнал А.
Наблюдать за появлением на дисплее РКПО информации "Потеря сигнала" в течение 10 с и за автоматическим переключением РКПО в режим ГЛОНАСС/GPS (т.е., что анализируется поток данных навигационного предложения GGA и установлен режим "GPS=1").
Повторить испытания, установив статус контрольного сигнала А "неработоспособен", "не контролируется", а также понизив коэффициент качества сигнала ниже величины порога WER0,1.
Убедиться, что на дисплее РКПО появляется информация "Потеря сигнала" и статус "ГЛОНАСС/GPS=2" изменяется на "ГЛОНАСС/GPS=1".
Контроль целостности с помощью дифференциального режима ДГНСС
РКПО должен работать в дифференциальном режиме.
Следует подключить контрольный сигнал А на вход приемника поправок.
Проверить работу и убедиться, что РКПО работает в дифференциальном режиме определения координат и анализирует поток данных навигационного предложения GGA, установив режим "GPS=2".
Проверить статус спутников, использующихся для определения координат, анализируя поток данных навигационного предложения GSA.
Установить величину псевдодальности (PRC) и скорость изменения псевдодальности (RRC) для определенного реального спутника или для имитируемого созвездия выше порога.
Убедиться, что в РКПО данный спутник исключен при решении задачи определения координат путем анализа потока данных предложения GSA.
6.3.15 Проверка текста сообщения на дисплее
РКПО должен работать в дифференциальном режиме ДГЛОНАСС/DGPS.
Следует включить контрольный сигнал А и убедиться, что РКПО и ПКИ функционируют нормально. Проверить работу и убедиться, что РКПО принимает текстовое сообщение, а его содержание индицируется на дисплее.
6.3.16 Выходные данные путевого угла и скорости относительно грунта
Методы испытаний для проверки точности расчета путевого угла и скорости относительно грунта
РКПО должен быть включен, а выходные данные, индицирующие путевой угол, должны контролироваться. Испытания должны проводиться при движении судна постоянным курсом на переднем ходу со скоростью от 0 до 1 узла. Через 10 с после установления заданной скорости в течение 2 мин производятся измерения путевого угла. Испытания повторяются для всего диапазона скоростей, указанного в таблице 1.
Требуемые результаты испытаний
Разность между истинными и измеренными значениями путевого угла на каждом цикле испытаний не должна превышать значений, указанных в таблице 2. Разность между истинными и измеренными значениями скорости относительно грунта на каждом цикле испытаний не должна превышать 2% от истинного значения скорости или 0,2 узла, в зависимости, что больше.
Достоверность информации о путевом угле и скорости относительно грунта
Отметка времени о координатах местоположения, которая содержится в навигационном сообщении GGA, DNS цифрового интерфейса [5], должна использоваться для подтверждения достоверности величин COG и SOG в навигационном предложении VTG цифрового интерфейса [5].
Метод испытаний
Проверить цифровой интерфейс на соответствие [5]. При нормальной работе РКПО изменить координаты места судна путем уменьшения числа используемых спутников. Проверить содержание сообщений в навигационных предложениях GGA, DNS и VTG.
Результаты испытаний
Убедиться, что признак достоверности в навигационном предложении GGA, DNS [5] отображается как "неработоспособный". Убедиться, что информация, которая содержится в навигационном предложении стандарта [5], установлена в нулевые значения.
6.3.17 Выходные данные о времени UTC
Метод испытаний
Проверить цифровой интерфейс на соответствие [5]. При нормальной работе РКПО изменить координаты места судна путем уменьшения числа используемых спутников до двух. Проверить содержание сообщений в навигационных предложениях GGA и ZDA.
Результаты испытаний
Убедиться, что информация о разрешающей способности метки времени UTC, которая содержится в навигационном предложении ZDA, соответствует требованиям [5].
6.4 Проверка характеристик на соответствие требованиям ГОСТ Р МЭК 60945
Все основные требования ГОСТ Р МЭК 60945, которые относятся к категории оборудования "защищенное" должны выполняться.
Разработчик аппаратуры должен объявить заранее о любых необходимых условиях для проведения климатических испытаний.
Приложение А
(справочное)
Типичная помеховая обстановка
А.1 Требования
Основным источником атмосферных помех являются грозовые разряды. Грозовая активность приводит к значительному повышению уровня помех, создавая мощные электромагнитные возмущения, распространяющиеся на огромные расстояния. Напряженность поля помех зависит от грозовой активности и скорости распространения в ионосфере. Для объективной оценки ожидаемого уровня атмосферных радиопомех МККР опубликован документ, содержащий карты поверхности земного шара с нанесенными средними (медианными) значениями уровня помех, отнесенными к шести последовательным четырехчасовым периодам одного дня в течение каждого из четырех сезонов года.
А.1.1 Существуют три сценария, характеризующие интенсивность атмосферных помех в зависимости от времени суток и региона:
1 Спокойный (ночной период суток)
Данный период характеризуется спокойными условиями воздействия помех, при которых компоненты формируемой импульсной помехи создаются единичными вспышками с относительно небольшой интенсивностью.
2 Тропический
Данная ситуация характерна для регионов, расположенных в средних широтах и для летних месяцев. Данный период характеризуется многочисленными грозовыми разрядами, которые распространяются на обширные районы. Некоторые помехи распространяются на большие расстояния и достигают места расположения антенны приемника, хотя в непосредственной близости источники помех отсутствуют.
3 Фронтальные
Грозовые разряды формируются в непосредственной близости от места расположения антенны приемника, т.е. образуется локальный район атмосферных помех с высокой интенсивностью.
РКПО должен обеспечивать нормальную работу в условиях типичной помеховой обстановки. Проверки включают измерения точности в статическом режиме и времени повторного поиска сигналов в течение 30 с после прерывания приема сигналов спутников из-за затенения антенны на время 60 с или меньше. Типичными помехами, действующими на входе РКПО, являются:
- широкополосная шумоподобная помеха;
- интерференция незатухающих колебаний;
- импульсные помехи.
В авиации проведены большие работы с целью определения уровней помех для трех категорий посадки, определяемых стандартом минимальных требований для авиационной приемной аппаратуры глобальной навигационной спутниковой системы GPS и широкозонной системы функционального дополнения WAAS.
Уровни помех, приведенные в настоящем приложении, базируются на основе данных (эталонных значениях), разработанных RTCA.
А.1.2 Уровни широкополосных помех
Эталонные значения для широкополосной помехи изменяются в зависимости от ширины полосы. Действие помехи можно представить как широкополосный шум на входе РКПО, на частоте 1575,42 МГц. Ширина полосы помехи для эталонного значения помехи показана на рисунке 1.
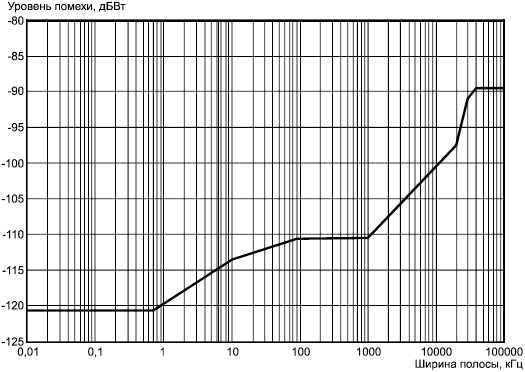
Рисунок А.1 - Диаграмма уровней помехи в зависимости от ширины полосы для широкополосной помехи
Интерференционные незатухающие колебания
Интерференционные незатухающие колебания взаимодействуют со спектральными частотными линиями С/А кода в структуре сигнала GPS. Приемники GPS более чувствительны к воздействию помех незатухающих колебаний CWI, чем к любым другим помехам. Эталонное значение интерференционных незатухающих колебаний CWI представлено на рисунке 2.
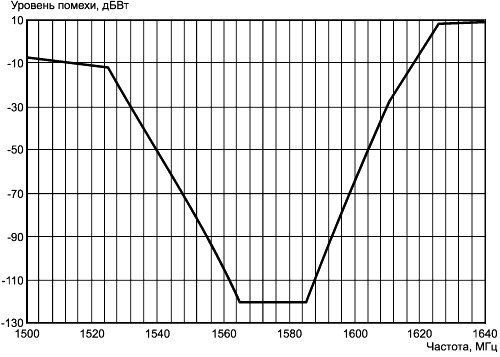
Рисунок А.2 - Диаграмма уровней помехи при непрерывном излучении
А.1.3 Импульсные помехи
Импульсные помехи вызываются близко работающими радарами или другими высокочастотными устройствами, использующими импульсный режим работы. Практически приемник сигналов ГЛОНАСС/GPS нечувствителен к воздействию импульсных помех, когда подвергается облучению импульсными сигналами с низким периодом повторения импульсов. Эталон импульсной помехи будет состоять из импульса с модулированной несущей на частоте 1575 МГц, с пиком несущей на уровне минус 20 dBm и коэффициентом скважности 10% при использовании импульса длительностью 1 мс.
А.2 Испытания
А.2.1 Порядок испытаний при воздействии помех
Порядок испытаний при воздействии помех, представленный в данном пункте, соответствует порядку испытаний, который используется разработчиками при сертификации авиационной приемной аппаратуры с целью подтверждения соответствия ее параметров требованиям стандарта RTCA. Порядок испытаний переработан и приспособлен к испытаниям морской аппаратуры ГНСС ГЛОНАСС/GPS с целью подтверждения соответствия ее параметров требованиям ГОСТ Р МЭК 60945.
А.2.1.1 Режимы имитатора
Пять спутников ГЛОНАСС/GPS
Один спутник с максимальным уровнем сигнала минус 120 dBm плюс усиление антенны до углов возвышения спутников над горизонтом 90°.
Один спутник с минимальным уровнем сигнала минус 130 dBm плюс усиление антенны до углов возвышения спутников над горизонтом 5°.
Три спутника с уровнем сигнала минус 127 dBm плюс усиление антенны до углов возвышения спутников над горизонтом 45°.
А.2.1.2 Проверка точности решения задачи расчета координат
Нормированная ошибка расчета координат, которая сравнивается с требуемой точностью в горизонтальной плоскости 10 м для вероятности 95%, рассчитывается по формуле
![]() ,
,
где - нормированная ошибка;
- мгновенная, среднеквадратическая ошибка определения координат места 2
в горизонтальной плоскости;
![]() - геометрический фактор ухудшения точности в горизонтальной плоскости для мгновенного значения измеренных координат.
- геометрический фактор ухудшения точности в горизонтальной плоскости для мгновенного значения измеренных координат.
Деление мгновенной величины ошибки 2 на 4/
![]() позволяет нормировать результаты испытаний к постоянной величине
позволяет нормировать результаты испытаний к постоянной величине ![]() , равной 4, и учитывать изменения положения спутника за счет изменения геометрии.
, равной 4, и учитывать изменения положения спутника за счет изменения геометрии.
Величина ![]() может быть определена с помощью РКПО или рассчитана. Для расчета координат должны использоваться только те спутники, которые включены в созвездие при расчете
может быть определена с помощью РКПО или рассчитана. Для расчета координат должны использоваться только те спутники, которые включены в созвездие при расчете ![]() .
.
А.2.1.3 Порядок проверки точности решения навигационной задачи
А.2.1.3.1 Помеховая обстановка
При испытаниях должны имитироваться виды помех, включающие - широкополосную шумоподобную помеху на частоте 1575,42 МГц, интерференционные незатухающие колебания и импульсную помеху.
В испытаниях при воздействии импульсной помехи должна использоваться модулированная несущая частота с пиком на уровне минус 20 dBm и коэффициентом скважности 10%.
Величины помех показаны в таблицах А.1-А.3.
Таблица А.1 - Широкополосная помеха
Параметр | Значение |
Ширина полосы шума | 1 МГц |
Суммарная среднеквадратическая мощность | минус 110,5 dBm |
Таблица А.2 - Импульсная помеха
Параметр | Значение |
Частота | 1575,42 МГц |
Длительность импульса | 1 мс |
Таблица А.3 - Интерференционные незатухающие колебания
Параметр | Значение |
Частота | Мощность, dBm |
1575,42 МГц | Минус 120,5 |
1626,00 | 8 |
А.2.1.3.2 Порядок испытаний
РКПО в период испытаний должен быть подключен к источнику одной из помех. Должны быть разработаны сценарии имитатора и включены сигналы спутников. РКПО должен быть включен и введен в работу.
В процессе расчета координат с помощью РКПО на вход испытуемой аппаратуры должна быть подана помеха, уровень которой соответствует требуемой величине. В установившемся режиме работы осуществляется запись 100 отсчетов координат места и величины ![]() с дискретностью записи 2 мин. Повторить испытания при подаче на вход других видов помех.
с дискретностью записи 2 мин. Повторить испытания при подаче на вход других видов помех.
А.2.1.3.3 Требуемые результаты
Формулировка "отказ" определяет ошибку измеренных координат с помощью РКПО, которая превышает 10 м или наблюдаются пропуски измерений более 5% от общего числа измерений.
А.2.1.4 Испытания по оценке времени повторного поиска сигналов
Метод испытаний
Испытания по оценке времени повторного поиска сигналов осуществляются с целью имитации временной потери слежения за сигналом, например из-за затенения антенны при проходе под мостами и т.д.
Критерием оценки "Выдержала испытания/отказ" при измерении времени повторного поиска является выборочное испытание, когда РКПО обеспечивает расчет достоверных координат с требуемой точностью через 30 с после восстановления нормальных условий приема сигналов спутников и осуществляет слежение в течение последующих 60 с.
Таблица А.4 показывает общий порядок испытаний и результаты, а также представляет подход при их проведении с целью определения требуемого времени движения и приемлемого расстояния при движении судна передним ходом.
Таблица А.4 - Общий порядок и результаты испытаний
Испытания | Отказы за определенное время | Результаты испытаний |
Серия из 20 испытаний | 0 | РКПО выдержал испытания |
1-5 | Необходимо | |
6 и более | РКПО не выдержал испытания | |
Серия из 20 испытаний | 0 | РКПО выдержал испытания |
1-5 (накопленные) | Необходимо | |
6 и более (накопленные) | РКПО не выдержал испытания | |
Серия из 20 испытаний | 0 | РКПО выдержал испытания |
1-5 (накопленные) | Необходимо | |
6 и более (накопленные) | РКПО не выдержал испытания | |
Серия из 20 испытаний | 0 | РКПО выдержал испытания |
от 1 до 5 (накопленные) | Необходимо | |
6 и более (накопленные) | РКПО не выдержал испытания | |
Серия из 20 испытаний | 0 | РКПО выдержал испытания |
от 1 до 5 (накопленные) | Необходимо | |
6 и более (накопленные) | РКПО не выдержал испытания |
А.2.1.4.1 Порядок испытаний по оценке времени повторного поиска сигналов
А.2.1.4.2 Помеховая обстановка
Суммарная среднеквадратическая мощность широкополосного шума на частоте 1575,42 МГц в полосе шума 1 МГц составляет минус 110,5 dBm.
А.2.1.4.3 Сценарии имитатора для проверки повторного поиска сигналов
А.2.1.4.4 Порядок испытаний
РКПО в период испытаний должен быть подключен к источнику широкополосной помехи, а также должны быть разработаны сценарии имитатора и включены сигналы спутников.
РКПО должен быть включен и введен в работу.
До выключения сигналов спутников РКПО должен работать в режиме установившейся точности измерения координат.
Выход имитатора отключается от РКПО на время 30 с.
Выход имитатора подключается ко входу РКПО.
Через 30 с производится запись координат и величины ![]() . Если через 30 с РКПО не производит расчет координат, фиксируется отказ и повторяются испытания.
. Если через 30 с РКПО не производит расчет координат, фиксируется отказ и повторяются испытания.
Убедиться, что в последующие 60 с РКПО производит расчет координат.
Повторить испытания по пункту, если необходимо.
Примечание - Если сценарий имитатора переустановлен, некоторые приемники ГНСС в составе РКПО могут потребовать стирания предыдущих данных для установления режима нормальной работы. Это происходит вследствие того, что в памяти постоянно хранится время, что приводит к невозможности работы программного обеспечения из-за временной задержки.
А.2.1.4.5 Требуемые результаты
Термин "отказ" (РКПО не выдержал испытание) определяет критерии работы, когда в РКПО:
- не производится расчет координат через 30 с;
- ошибка рассчитанных координат больше 10 м;
- координаты на выходе отсутствуют за 60 с после появления признака отказа.
Для определения критерия "выдержала испытание/отказ" при проверке времени повторного поиска сигналов необходимо использовать таблицу 2.
Библиография
[1] | Международная Конвенция по охране человеческой жизни на море, СОЛАС, Глава V. Безопасность мореплавания | ||
[2] | МЭК 61108-1* | Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 1. Глобальная система позиционирования (GPS). Приемная аппаратура. Стандарт требований к характеристикам, методы и требуемые результаты испытаний | |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | |||
[3] | МЭК 61108-2 | Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 2. Глобальная навигационная спутниковая система (ГЛОНАСС). Приемная аппаратура. Стандарт требований к характеристикам, методы испытаний и требуемые результаты испытаний | |
[4] | МЭК 61108-4 | Морское навигационное оборудование и средства радиосвязи. Глобальные навигационные спутниковые системы. Часть 4. Дифференциальные подсистемы DGPS и ДГЛОНАСС. Приемная аппаратура. Стандарт требований к характеристикам, методы и требуемые результаты испытаний | |
[5] | МЭК 61162-2 | Цифровые интерфейсы для судового навигационного и связного оборудования и систем | |
[6] | МЭК 60721-3-6 Часть 3 | Классификация групп параметров условий окружающей среды и их пределы - условия на судах | |
[7] | Стандарт RTCM | Дифференциальные поправки для ДГЛОНАСС/DGPS, версия 2.3 | |
[8] | Рекомендации МСЭ-Р.М.823 | Технические характеристики передачи дифференциальных поправок в глобальной навигационной спутниковой системе (ГНСС) в диапазоне частот морских радиомаяков 285-325 кГц | |
[9] | Резолюция ИМО А.860(20) | Политика мореплавания в отношении будущей глобальной навигационной спутниковой системы | |
[10] | Резолюция ИМО А.915(22) | Пересмотренные требования мореплавания в отношении будущей глобальной навигационной спутниковой системы (ГНСС) | |
[11] | Резолюция ИМО А.953(23) | Всемирная радионавигационная система | |
[12] | Резолюция ИМО MSC.233(82) | Принятие эксплуатационных требований к судовому приемному оборудованию системы ГАЛИЛЕЙ | |
[13] | Резолюция ИМО А.529(13) | Стандарты точности судовождения | |
[14] | Резолюция ИMO MSC.114(73) | Эксплуатационные требования к судовому приемному оборудованию для приема информации от морских радиомаяков, передающих дифференциальные поправки спутниковых навигационных систем GPS и ГЛОНАСС | |
[15] | Резолюция ИMO MSC.115(73) | Эксплуатационные требования к объединенному судовому приемному оборудованию систем ГЛОНАСС/GPS | |
[16] | Резолюция ИМО А.424 | Технико-эксплуатационные требования к гирокомпасам | |
[17] | Спецификация сигнала GPS | Стандартный режим работы (SPS). Министерство обороны США | |
[18] | Интерфейсный контрольный документ | Глобальная навигационная спутниковая система ГЛОНАСС | |
[19] | Российский Речной Регистр | Правила классификации и постройки судов внутреннего плавания (ПСВП) | |
[20] | Морской Регистр судоходства | Правила по оборудованию морских судов. Часть V. Навигационное оборудование | |
[21] | Морской Регистр судоходства | Правила квалификации и постройки морских судов | |
Электронный текст документа
и сверен по:
, 2011
