ГОСТ Р 53573-2009
(ИСО 9611:1996)
Группа Т34
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ИЗМЕРЕНИЯ ВИБРАЦИИ, ПЕРЕДАВАЕМОЙ МАШИНОЙ ЧЕРЕЗ УПРУГИЕ ИЗОЛЯТОРЫ
Общие требования
Vibration. Measurement of vibration transferred into resilient isolators. General requirements
ОКС 17.160.20
Дата введения 2011-01-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией "Научно-исследовательский центр контроля и диагностики технических систем" (АНО "НИЦ КД") на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация и удар"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. N 866-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 9611:1996 "Акустика. Описание источников вибрации с точки зрения последующего звукового излучения через присоединенные конструкции. Измерения скорости в точках установки машины на упругие изоляторы" (ISO 9611:1996 "Acoustics - Characterization of sources of structure-born sound with respect to sound radiation from connected structures - Measurements of velocity at the contact points of machinery when resiliently mounted") путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2004 (подраздел 3.5)
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Машины, используемые на производстве, являются источником вибрации, которая, распространяясь по конструкции здания, воздействует на работников производства, другие машины и оборудование, само здание. Другим нежелательным эффектом, порожденным распространяющейся вибрацией, является шум, излученный вибрирующими элементами конструкции. Риск, связанный с вредным воздействием вибрации машин, требует соответствующей оценки. Поэтому в целях обеспечения вибрационной безопасности применения машин от изготовителей требуют указать их вибрационную активность.
Для всеобъемлющей и точной характеристики источника распространяющейся по конструкции вибрации необходимо большое число измерений, что сделало бы процедуру заявления вибрационной активности машины слишком дорогостоящей. Настоящий стандарт дает некоторое компромиссное решение, позволяющее упростить процедуру измерений за счет некоторой потери точности и универсальности метода. Упрощенное описание допустимо для машин, удовлетворяющих следующим условиям:
a) соединения машины с упругими изоляторами можно рассматривать как точечные;
b) изоляторы нагружены опорами машины, имеющими существенно меньшую входную подвижность по всем направлениям движения.
При выполнении данных условий возбуждение изоляторов вибрацией, производимой машиной, можно рассматривать как чисто кинематическое в широком диапазоне характеристик изоляторов. Это позволяет характеризовать машину как источник вибрации по результатам измерений вибрации на ее опорах.
Настоящий стандарт устанавливает общие принципы измерений вибрации на опорах машин, установленных на изоляторы. Для машин конкретных видов на основе настоящего стандарта могут быть разработаны соответствующие испытательные коды по вибрации.
По сравнению с примененным международным стандартом ИСО 9611:1996 в текст настоящего стандарта внесены следующие изменения:
- исключено деление раздела 1 на подразделы;
- по всему тексту представление результатов измерений в относительных величинах (дБ) заменено представлением в абсолютных величинах, в связи с чем из раздела 3 исключены терминологические статьи "3.5 уровень скорости поступательного движения" и "3.6 Уровень скорости углового движения". Соответствующим образом изменена нумерация терминов раздела 3. Раздел дополнен терминологическими статьями, выделенными путем заключения в рамки из тонких линий;
- ссылочные международные стандарты заменены соответствующими межгосударственными стандартами и национальным стандартом Российской Федерации, выделенными курсивом*;
_______________
* В бумажном оригинале обозначения и номера стандартов в п.5.4.1, п.6.3, разделе 8 выделены курсивом, остальные ссылки в разделе "Предисловие" и по тексту документа приводятся обычным шрифтом. - .
- раздел 2 дополнен ГОСТ Р ИСО 5725-2;
- из структурного элемента Библиография исключены документы, на которые нет ссылок в тексте стандарта.
1 Область применения
Настоящий стандарт устанавливает упрощенный метод описания вибрационной активности машины, передающей вибрацию своих опор через упругие изоляторы.
Метод применяют при выполнении следующих условий:
- вибрацию машины можно считать стационарной;
- области контакта опор машины с изоляторами можно считать точечными;
- входная подвижность опор машины в области контакта с изоляторами много меньше входной подвижности изоляторов для всех направлений движения;
- изоляторы установлены на жестком и массивном основании (фундаменте).
При выполнении указанных условий возбуждение, передаваемое машиной на изоляторы, можно рассматривать как кинематическое, т.е. для описания вибрационной активности машины достаточно измерить вибрацию ее опор, например, скорость.
Результаты измерений, выполненных в соответствии с настоящим стандартом, позволяют:
- контролировать соответствие машин требованиям к их вибрационной активности;
- сравнивать вибрационную активность машин одного вида и размера;
- получить данные для расчета вибрации, передаваемой машиной через упругие изоляторы.
Метод измерений применяют в ограниченном диапазоне частот, нижняя граница которого определяется условием кинематического характера возбуждения колебаний, когда на вибрацию опор машины не оказывают существенного влияния свойства изолятора и его основания (см. приложение А), а верхняя граница
- условием точечного контакта опоры с изолятором (см. приложение В).
Примечания
1 Для большинства машин можно подобрать изоляторы, обеспечивающие значение нижней границы диапазона частот в интервале от 20 до 40 Гц.
2 Конструкция опор большинства машин такова, что верхняя граница диапазона частот измерений лежит в интервале от 1 до 4 кГц.
Настоящий стандарт распространяется на измерение вибрации по всем шести степеням свободы, хотя для многих машин можно ограничиться измерениями в меньшем числе направлений поступательной и угловой вибрации (см. приложение F).
Хотя настоящий стандарт устанавливает метод измерений на опорах машин, его можно применять также для измерений в других точках контакта машины с присоединенными конструкциями, где вибрация передается через упругие соединения (например, через гибкий вал двигателя или гибкие вставки в трубопроводе). В этом случае должен быть определен диапазон частот применения метода (,
) в соответствии с рекомендациями приложений А и В.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р ИСО 5725-2-2002 Точность (правильность и прецизионность) методов и результатов измерений. Часть 2. Основной метод определения повторяемости и воспроизводимости стандартного метода измерений (ИСО 5725-2:1994, IDT)
ГОСТ Р 53188.1-2008 Шумомеры. Часть 1. Технические требования (МЭК 61672:2002 "Электроакустика. Шумомеры. Часть 1. Технические требования", MOD)
ГОСТ ИСО 5348-2002 Вибрация и удар. Механическое крепление акселерометров (ИСО 5348:1998, IDT)
ГОСТ 17168-82 Фильтры электронные октавные и третьоктавные. Общие технические требования и методы испытаний (МЭК 61260:1995 "Электроакустика. Фильтры с полосой пропускания в октаву и доли октавы", NEQ)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 область контакта (contact area): Область, через которую вибрация передается от машины в присоединенные конструкции.
3.2 точка контакта (connecting point): Область контакта машины с изолятором.
3.3 точечный источник вибрации (structure-borne sound point source): Область контакта, вибрирующая как твердое тело.
3.4 стандартное отклонение повторяемости (repeatability standard deviation) [ГОСТ Р ИСО 5725-1-2002, статья 3.15] |
Примечание - Данная величина является мерой разброса результатов измерений, выполненных в условиях повторяемости.
3.5 условия повторяемости (repeatability conditions): Условия, при которых независимые результаты измерений (или испытаний) получаются одним и тем же методом на идентичных объектах испытаний, в одной и той же лаборатории, одним и тем же оператором с использованием одного и того же оборудования, в пределах короткого промежутка времени. [ГОСТ Р ИСО 5725-1-2002, статья 3.14] |
3.6 стандартное отклонение воспроизводимости (reproducibility standard deviation) [ГОСТ Р ИСО 5725-1-2002, статья 3.19] |
Примечание - Данная величина является мерой рассеяния результатов измерений, выполненных в условиях воспроизводимости.
3.7 условия воспроизводимости (reproducibility conditions): Условия, при которых результаты измерений (или испытаний) получают одним и тем же методом, на идентичных объектах испытаний, в разных лабораториях, разными операторами, с использованием различного оборудования. [ГОСТ Р ИСО 5725-1-2002, статья 3.18] |
4 Измеряемые величины
Измеряемой величиной является скорость вибрации. Результаты измерений представляют в виде третьоктавных спектров скорости для трех поступательных и трех угловых движений во взаимно перпендикулярных направлениях на каждой опоре машины.
5 Испытательная установка
5.1 Место испытаний и фоновая вибрация
Машину устанавливают на изоляторы по 5.2. Для нормальной работы машины в процессе испытаний может потребоваться ее соединение с другими конструкциями (см. 5.3). Испытательная установка (см. рисунок 1) может быть размещена в любом месте, например, в цеховом помещении завода-изготовителя, на испытательном стенде, в лаборатории (если там есть условия для ее размещения), на месте эксплуатации машины. Фоновая вибрация, наведенная сторонними источниками, в точках измерений должна быть, по меньшей мере, на 10 дБ ниже вибрации, производимой испытуемой машиной. На результаты измерений не должен также оказывать влияние акустический шум, излучаемый работающей машиной (см. приложение D).

1 - фундамент; 2 - испытуемая машина; 3 - подсоединенный трубопровод (см. 5.3); 4 - датчики вибрации; 5 - опора; 6 - изолятор
Рисунок 1 - Испытательная установка
Примечание - Испытания малых машин жесткой конструкции (например, электродвигателей мощностью до 10 кВт) можно проводить, подвесив их так, чтобы машина могла нормально работать, а ее опоры не испытывали механических нагрузок. Это позволяет снизить границу диапазона частот применения метода измерений до очень малых значений.
5.2 Изоляторы и фундамент
Изоляторы должны представлять собой упругие конструкции, способные поддерживать машину для обеспечения нормальных условий ее работы. Динамические свойства изолятора должны обеспечивать достаточно низкое значение частоты (см. раздел 7 и приложение А) и, кроме того, не допускать передачи на фундамент значительной вибрационной мощности на частотах выше
.
Изолятор устанавливают на фундамент с малым значением входной подвижности.
Примечание - Требования настоящего подраздела могут быть наилучшим образом реализованы применением мягких резиновых изоляторов или пневмопружин. Допустимо использование также металлических амортизаторов с резиновыми вставками в области контакта с опорой машины. Дополнительная информация о выборе изоляторов приведена в приложении G.
Установочные фланцы, которыми изоляторы крепят к машине, не должны существенно изменять массу и жесткость опоры. Более подробная информация может быть приведена в руководстве по применению.
В диапазоне частот применения метода фундамент должен быть жестким и массивным, чтобы система "фундамент-изоляторы" не создавала значительных динамических нагрузок на опоры машины (см. 7.1 и приложение G).
5.3 Конструкции, присоединяемые к машине на месте испытаний
Часто для нормальной работы машины на месте испытаний необходимо присоединить ее к источникам передаваемого движения (валы), рабочей среды (трубопроводы), электрической энергии (кабели) и др. Устройства соединения должны включать в себя гибкие элементы и поэтому неспособны значительно изменить низшую резонансную частоту системы, состоящей из массы испытуемой машины и жесткости изоляторов. Более подробно механические и акустические связи испытуемой машины на месте испытаний рассмотрены в приложении D.
5.4 Положение датчиков и направления измерений вибрации
5.4.1 Основной способ размещения датчиков вибрации
Рекомендуется измерять поступательную и угловую вибрацию в каждой точке на опорах машины с помощью пары акселерометров.
Для измерения скорости поступательного движения в направлении оси
и угловой скорости
в направлении вокруг оси
акселерометры должны быть установлены, как показано на рисунке 2. При недостатке места для установки акселерометров со стороны изолятора они могут быть установлены, как показано на рисунке 3, при условии, что плоскости внешней и внутренней поверхностей опоры параллельны друг другу. Расстояние между акселерометрами должно быть не менее 0,5
и не более 1,5
, где
- размер области контакта вдоль направления
. При этом оси координат должны быть направлены следующим образом: ось
- перпендикулярно поверхности контакта, ось
- параллельно оси максимальной длины машины. Акселерометры устанавливают симметрично относительно точки
(см. рисунки 2 и 3), представляющей собой геометрический центр области контакта опоры с изолятором.
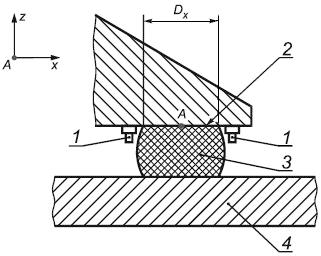
1 - акселерометр; 2 - опора; 3 - изолятор; 4 - фундамент
Рисунок 2 - Положение акселерометров для измерений и

1 - акселерометры
Рисунок 3 - Положение акселерометров для измерений и
при недостаточном месте для их размещения со стороны изолятора
Для определения угловой скорости в направлении вокруг оси
пару акселерометров устанавливают так же, как на рисунках 2 и 3, но повернутыми на 90° вокруг оси
.
Для измерений скоростей поступательного движения и
в направлениях
и
соответственно пару акселерометров устанавливают следующим образом:
a) предпочтительно симметрично относительно точки на расстоянии от нее от 0,25
до 0,75
или от 0,25
до 0,75
(
- размер области контакта в направлении
);
b) как показано на рисунке 3.
Также устанавливают акселерометры для измерений угловой скорости в направлении вращения вокруг оси
.
Если точка находится посередине между осями чувствительности акселерометров, то составляющие поступательного движения будут измерены неточно, что потребует введения поправок в соответствии с приложением С.
Акселерометры устанавливают на опору машины в соответствии с ГОСТ ИСО 5348.
5.4.2 Альтернативный способ размещения датчиков вибрации
В некоторых случаях для измерений вибрации опоры вместо пары акселерометров можно использовать один акселерометр. Условия допустимости такой замены будут неодинаковы для разных составляющих вибрации.
Составляющую скорости можно измерить с помощью одного акселерометра для измерения поступательной вибрации, установленного на верхней поверхности опоры, при выполнении следующих условий (см. рисунок 4):
![]() и
и ![]() ,
,
![]() ,
,
![]() ,
,
где - толщина опоры;
,
- расстояния от оси чувствительности акселерометра до точки
по соответствующим координатам.

1 - акселерометр; 2 - изолятор
Рисунок 4 - Положение акселерометра для измерений
Составляющую скорости можно измерить с помощью одного акселерометра, расположенного в одном из трех положений, показанных на рисунке 5:

1 - изолятор; 2 - установочный фланец изолятора; 3 - положение 1-го акселерометра (,
,
); 4 - положение 2-го акселерометра (
,
,
); 5 - положение 3-го акселерометра (
,
,
)
Рисунок 5 - Возможные положения акселерометра для измерений
- акселерометр расположен на верхней поверхности опоры или вблизи нее, если выполнены следующие условия:
![]() и
и ![]() ,
,
![]() ,
,
![]() ,
,
где ,
- расстояние от оси чувствительности акселерометра до точки
по координатам
и
соответственно;
- расстояние от оси чувствительности акселерометра до области контакта;
- акселерометр расположен на торце опоры, если выполнены следующие условия:
![]() ,
,
![]() ,
,
![]() ,
,
где - расстояние от монтажной поверхности акселерометра до точки
по координате
;
- расстояние от оси чувствительности акселерометра до области контакта;
- акселерометр расположен на установочном фланце изолятора, если выполнено условие:
![]() ,
,
где - расстояние от оси чувствительности акселерометра до области контакта.
Условия измерений составляющей скорости аналогичны условиям измерений
(с заменой в обозначениях
на
и
на
).
Каждую из составляющих угловой вибрации можно измерить с помощью одного датчика углового ускорения, расположенного в любой точке опоры на расстоянии от точки , не превышающем меньшее из двух значений:
![]() или
или ![]() .
.
5.5 Режим работы машины
Во время измерений машина должна работать в условиях, установленных соответствующим испытательным кодом по вибрации. Если испытательный код отсутствует, то машина работает в обычных условиях применения в одном из следующих режимов:
a) на номинальной рабочей скорости с номинальной рабочей нагрузкой;
b) с полной нагрузкой [если она отличается от режима а)];
c) без нагрузки (на холостом ходу);
d) в режиме, при котором вибрация опор машины максимальна;
e) в режиме с моделированной нагрузкой;
f) в заданном рабочем цикле;
g) в режиме, установленном для измерения шума машин данного вида.
6 Средства измерений
6.1 Датчики вибрации
Применяемые акселерометры должны обеспечивать измерение ускорения поступательного движения в заданном направлении. Относительный поперечный коэффициент преобразования не должен превышать 4%. Допускается применение датчиков скорости или перемещения, если они способны обеспечить ту же точность измерений, что и акселерометры.
Датчики контактного типа, устанавливаемые на опору, не должны существенно влиять на измеряемую вибрацию. Данное требование удовлетворяется, если масса датчика в сумме с массой установочного фланца изолятора не превышает 10% массы опоры непосредственно над фланцем изолятора.
Частотная характеристика акселерометра должна быть постоянной в диапазоне частот применения метода с допустимым отклонением в пределах 1 дБ в каждой третьоктавной полосе частот. Коэффициенты преобразования акселерометров в каждой паре не должны отличаться более чем на 1 дБ.
Если угловую скорость измеряют с помощью датчика угловой вибрации, то коэффициент преобразования датчика в других пяти направлениях движения должен быть мал (для составляющих угловой вибрации - не менее чем на 20 дБ меньше коэффициента преобразования в направлении измерений).
6.2 Сумматоры сигналов
Электрические сигналы от каждой пары акселерометров подлежат суммированию при измерении ускорения поступательного движения и вычитанию при измерении углового ускорения. Эту операцию выполняет аналоговое или цифровое устройство, называемое сумматором. Перед выполнением операций суммирования и вычитания должны быть внесены соответствующие поправки, учитывающие разницу в коэффициентах усиления и фазовый сдвиг в двух измерительных каналах. Данное требование сохраняется и в случае, если операции суммирования (вычитания) выполняют с помощью цифрового устройства, реализующего процедуру быстрого преобразования Фурье (БПФ), поскольку такие устройства используют фильтры нижних частот для защиты от наложения спектров, вносящие в сигнал фазовый сдвиг, который нельзя считать пренебрежимо малым. Поправки допускается не вносить, если общий фазовый сдвиг не превышает 0,1°.
Если акселерометры в паре установлены в противоположных направлениях, то суммирование должно быть заменено вычитанием и наоборот.
6.3 Усилители, фильтры и устройства регистрации (отображения) данных
После сумматора электрические сигналы подлежат усилению, фильтрации с последующим вычислением среднеквадратичного значения, которое должно быть сохранено регистрирующим устройством или отображено показывающим устройством.
Усилители, фильтры и устройства регистрации (отображения) данных должны удовлетворять требованиям к шумомерам класса 1 по ГОСТ Р 53188.1*. Характеристики фильтров - по ГОСТ 17168*.
_______________
* В бумажном оригинале выделено полужирным курсивом. - .
6.4 Калибровка
Перед проведением каждой серии измерений проводят калибровку измерительной цепи в целом (как для амплитудно-частотной, так и для фазочастотной характеристик) на одной или нескольких частотах с помощью источника опорного ускорения. При калибровке каждую пару акселерометров устанавливают на стол вибростенда одновременно. Электрическую часть измерительной цепи калибруют во всем диапазоне частот измерений не реже чем раз в полгода. Если вместо отображения результатов измерений показывающим устройством предусмотрено сохранение (запись) исходных сигналов, то измерительную цепь калибруют в начале и в конце каждой серии измерений. Вместе с записью анализируемого сигнала следует сохранять записи, полученные при калибровке с использованием тестовых сигналов. Сохраняют, по крайней мере, одну запись для сигнала датчика, возбуждаемого вибростендом, и две записи с реакцией на тестовый сигнал для электрической части измерительной цепи.
Примечание - Если измерению подлежат только составляющие скорости поступательного движения (см. приложение F), то при калибровке допускается не определять фазочастотную характеристику измерительной цепи.
7 Испытания
7.1 Предварительные измерения
Перед проведением измерений необходимо определить нижнюю и верхнюю границы диапазона частот измерений применения метода в соответствии с приложениями А и В.
Если есть возможность удалить изолятор, не нарушая условия равновесия машины, то измеряют третьоктавные спектры скорости при наличии и отсутствии данного изолятора. Результаты измерений не должны отличаться более чем на 2 дБ. Результаты измерений в полосах частот, где эта разность больше, в протокол испытаний не вносят.
Если удалить изолятор невозможно, то проводят следующее испытание. Останавливают машину и возбуждают непрерывную случайную вибрацию фундамента, например с помощью электродинамического вибровозбудителя. Измеряют скорость на обеих установочных поверхностях изолятора. Результаты измерений в третьоктавных полосах для составляющих вибрации во всех направлениях должны различаться не менее чем на 10 дБ.
Проверяют выполнение требования 5.1 к фоновой вибрации.
7.2 Измерение скорости
Принцип измерений скорости (поступательного и углового движений) состоит в следующем (см. рисунок 6).

Рисунок 6 - Измерение скорости поступательного и углового движения
Суммированием выходных сигналов и
пары акселерометров определяют ускорение
поступательного движения в направлении
по формуле
![]() .
.
Скорость поступательного движения рассчитывают по формуле
![]() ,
,
где - среднегеометрическая частота третьоктавной полосы частот.
Примечание - Результат вычисления скорости вышеописанным методом является приближенным. Если вибрация машины является широкополосной (белым шумом), то случайная погрешность измерений метода может достигать ±0,2 дБ. Если сигнал вибрации состоит из составляющих на дискретных частотах, то погрешность измерений может достигать ±1 дБ. Погрешность метода можно исключить, если вместо ускорения измерять непосредственно сигнал скорости.
Среднеквадратичное значение скорости ![]() находят по формуле
находят по формуле
![]() ,
,
где - время интегрирования.
Угловую скорость ![]() и
и ![]() рассчитывают по следующим формулам:
рассчитывают по следующим формулам:
![]() ,
,
![]() ,
,
где - расстояние между осями чувствительности акселерометров.
Примечание - Результаты расчета угловой скорости имеют те же погрешности, что и для скорости поступательного движения.
Время интегрирования должно быть достаточным для получения стабильных результатов измерений. Если во время испытаний машина работает по заданному циклу, то время интегрирования
должно быть не менее продолжительности нескольких циклов. Требуемое время интегрирования
, с, зависит от номера третьоктавной полосы и должно быть не менее 1280/
, где
- среднегеометрическая частота полосы, Гц. Например, для полосы со среднегеометрической частотой
20 Гц время интегрирования
должно быть не менее 64 с.
7.3 Усреднение результатов
Результаты измерений получают для каждой третьоктавной полосы в диапазоне частот измерений, для каждого направления измерений и для каждой опоры.
При необходимости можно получить значение скорости для каждого направления и для каждой третьоктавной полосы усреднением полученных результатов по всем опорам машины.
8 Точность метода
Точность метода для данного семейства машин характеризуют стандартным отклонением повторяемости и стандартным отклонением воспроизводимости
. Значения
и
зависят от частоты и от типа машины. При строгом соблюдении условий испытаний можно ожидать, что
не превысит 2 дБ, а
не превысит 4 дБ в значительной части диапазона частот между
и
.
Значения стандартных отклонений повторяемости и воспроизводимости увеличиваются при использовании альтернативного способа размещения датчиков вибрации (см. 5.4.2).
Примечание - Для получения более надежной информации о точности метода в отношении машин данного вида рекомендуется провести межлабораторные испытания по ГОСТ ИСО 5725-2*.
_______________
* Вероятно ошибка оригинала. Следует читать ГОСТ Р ИСО 5725-2. - .
9 Протокол испытаний
Протокол испытаний должен содержать ссылку на настоящий стандарт, а также следующие сведения:
a) наименование организации, проводившей испытания;
b) дату проведения испытаний;
c) описание испытуемой машины (тип, модель, масса, мощность, опоры и т.д.);
d) описание места, где были проведены испытания, и испытательной установки (особо обратить внимание на используемые упругие элементы), описание конструкций, присоединенных к машине при испытаниях;
e) режим(ы) работы машины во время испытаний;
f) описание метода определения частот и
;
g) результаты измерений согласно 7.1 (если были проведены);
h) результаты измерений фоновой вибрации по 5.1 (если были проведены);
i) положение, ориентацию и способы крепления датчиков вибрации;
j) используемые средства измерений, включая их тип, заводской номер, наименование изготовителя и сведения о проведенных калибровках;
k) результаты измерений скорости для каждой опоры машины;
l) усредненные значения скорости по 7.3 (при необходимости);
m) значение стандартного отклонения повторяемости (если определялось).
Приложение А
(обязательное)
Определение нижней границы диапазона частот применения метода измерений
Под нижней границей диапазона частот применения метода измерений понимают среднегеометрическую частоту низшей третьоктавной полосы, для которой можно обоснованно предположить, что силы реакции изолятора не окажут существенного влияния на движение опоры машины. Если машину на частотах ниже
можно рассматривать как жесткое тело, то
должна в три раза превышать
, где
- максимальная для всех шести степеней свободы движения машины собственная частота колебаний машины на изоляторах.
Собственные частоты колебаний находят, возбуждая вибрацию машины (например, в форме переходного процесса или гармонического сигнала с качанием частоты) и измеряя отношение ускорения отклика к вынуждающей силе в узких полосах частот.
Для определения возбуждение подают на одну из опор, расположенную вне плоскости симметрии машины, и определяют собственные частоты колебаний по шести степеням свободы. Максимальную из этих частот принимают за
.
Допускается определять расчетным методом с последующей экспериментальной проверкой по измерениям в третьоктавных полосах частот.
Приложение В
(обязательное)
Определение верхней границы диапазона частот применения метода измерений
Под верхней границей диапазона частот применения метода измерений понимают среднегеометрическую частоту высшей третьоктавной полосы, для которой можно обоснованно предположить, что опора машины является точечным источником вибрации, передаваемой в изолятор.
Чтобы определить значение , два акселерометра последовательно устанавливают на максимальном и минимальном расстояниях друг от друга (см. рисунок В.1). Измеряют скорости в третьоктавных полосах частот в соответствии с 5.4 и 7.2 с помощью средств измерений, требования к которым установлены в разделе 6. Сравнивают результаты измерений для двух установок акселерометров. В качестве
принимают среднегеометрическое значение наивысшей из третьоктавных полос частот, у которых разность между результатами измерений составляющей вибрации в любом направлении поступательного или углового движения для двух установок акселерометров не превышает 4 дБ.

а) Минимальное расстояние

b) Максимальное расстояние
Рисунок В.1 - Установка акселерометров при определении
Если акселерометры невозможно разместить на расстоянии 1,5 друг от друга, то их устанавливают на меньшем расстоянии, но не менее
, где
- максимальный размер области контакта. При невозможности провести измерения в плоскости, где расположена точка
, измерения проводят, как показано на рисунке 3.
Примечание - Метод, изложенный в настоящем приложении, может быть использован для определения соотношения между и размерами типичных опор машины при составлении испытательного кода по вибрации для машин определенного вида.
Приложение С
(обязательное)
Поправки, вносимые при установке акселерометров не на поверхности контакта опоры с изолятором
Если скорость опоры измеряют в плоскости, параллельной области контакта опоры машины с изолятором, то результаты измерений в двух направлениях движения будут иметь систематические погрешности, которые необходимо устранить внесением соответствующих поправок.
Если составляющие скорости на поверхности измерений обозначить ,
,
,
,
,
, а в области контакта -
,
,
,
,
,
, то между угловыми скоростями и между скоростями поступательного движения в направлении оси
имеют место соотношения:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Для направлений движения по осям и
справедливы следующие соотношения (в предположении, что положительные направления движения выбраны такими, как на рисунке С.1):
![]() ,
,
![]() ,
,
где - расстояние между поверхностью измерений и областью контакта [значение
должно быть много меньше максимального размера области контакта
![]() ].
].

Рисунок С.1 - Скорости на параллельных поверхностях опоры машины
Во всех формулах настоящего приложения рассматриваются мгновенные значения скорости. Это означает, что введение поправок даст правильные результаты только в случае, если соответствующим образом учтены сдвиги фазы в цепях измерения скорости. Как правило, такую процедуру реализуют с помощью БПФ-анализатора (см. 6.2).
Примечание - Метод, изложенный в настоящем приложении, может быть использован для определения значимости поправок в зависимости от толщины опоры при составлении испытательного кода по вибрации для машин определенного вида. Может оказаться, что для машин данного вида указанные поправки будут пренебрежимо малы или их можно определить каким-либо более простым способом.
Приложение D
(обязательное)
Учет механических и акустических связей на месте проведения испытаний
При проведении испытаний необходимо рассмотреть влияние всех факторов, связанных с местом проведения испытаний, на результаты измерений вибрации. Существуют два источника нежелательных влияний:
- конструкции, присоединенные к машине (кроме изоляторов, на которые машина оперта);
- излученный или отраженный воздушный шум.
Примерами присоединенных конструкций могут быть выпускная труба, подводящая труба, труба водяного охлаждения, соединительный вал, вспомогательные опоры и электрические кабели. Все вышеперечисленные конструктивные элементы, за исключением электрических кабелей, должны иметь гибкие вставки. Электрические кабели не должны иметь жесткой оболочки, а место их жесткой фиксации к каким-либо конструкциям на месте испытаний должно отстоять от точки соединения с машиной не менее чем на 100, где
- диаметр кабеля. Желательно, чтобы на этом участке кабель был изогнут на угол, по крайней мере, 90°.
В принципе метод испытаний, установленный настоящим стандартом, предполагает создание условий свободного звукового поля над звукоотражающей поверхностью. Однако в большинстве случаев допустимо отступление от данного требования, поскольку излученный и отраженный звук не оказывают существенного влияния на вибрацию опор. Исключениями могут быть следующие случаи:
a) машина имеет очень легкие опоры. Для таких опор очень трудно обеспечить виброизоляцию, поэтому, по возможности, конструкцию машины следует модернизировать;
b) машину облегченной конструкции испытывают в условиях реверберационного поля. В этом случае следует принять меры по ослаблению реверберации, например, посредством облицовки стен испытательного помещения звукопоглощающими материалами;
c) пространство между машиной и фундаментом (или между машиной и плоскостью какой-либо другой конструкции на месте испытания) невелико. Даже если слой воздуха в этом пространстве не влияет на значение низших собственных частот колебания машины на изоляторах, в нем может образовываться реверберационное поле, что окажет влияние на результаты измерений. Это может считаться приемлемым, если такое расположение машины соответствует реальным условиям ее работы в процессе эксплуатации. В противном случае влияние реверберационного поля должно быть сведено к минимуму принятием следующих мер:
- увеличением, по возможности, расстояния между машиной и фундаментом (или поверхностью другой конструкции);
- просверливанием отверстий в фундаменте (или в поверхности другой конструкции);
- применением средств звукопоглощения;
- сочетанием вышеперечисленных мер.
Приложение Е
(справочное)
Основные предпосылки применения метода
Теоретические основы метода, установленного настоящим стандартом, рассмотрены в [1], [2]. В настоящем приложении приведены некоторые основные элементы этой теории.
Важными предпосылками для проведенных исследований послужили следующие предположения:
a) опора является источником передаваемой в изолятор вибрации;
b) выше некоторой частоты вибрация опоры предполагается независимой от свойств изолятора и фундамента, на которые машина установлена, в широком диапазоне их изменений;
c) взаимным влиянием колебаний опор можно пренебречь;
d) взаимным влиянием колебаний разных степеней свободы одной опоры можно пренебречь.
Другими словами, предполагается, что вибрационная активность машины может быть полностью описана через несколько сосредоточенных в опорах источников вибрации, обладающих низкой входной подвижностью и обусловливающих колебания по шести степеням свободы для каждого источника (каждой опоры).
Предположения a) и b) требуют экспериментального подтверждения. Вместо проведения испытаний по 7.1 и приложениям А и В допускается провести проверку предположения а) практическим исследованием динамического поведения опоры в зависимости от частоты, а предположения b) - измеряя значения членов матрицы входной подвижности для каждой опоры машины и каждого статически нагруженного изолятора после их установки на фундамент. Однако эти испытания трудоемки и требуют высокой квалификации экспериментатора, поэтому испытания по 7.1 являются предпочтительными.
Предположение с) о независимости движения соседних опор (в смысле влияния на результаты измерений среднеквадратичных значений скорости в третьоктавных полосах частот на данной опоре) можно принять при выполнении одного из следующих условий:
- расстояние между опорами велико по сравнению с пространственным периодом мод колебаний конструкции, на которую передается вибрация (фундамент и т.п.). Это положение справедливо только в диапазоне частот выше некоторой определенной частоты;
- цель измерений ограничена получением только общего описания вибрационной активности машины, не требующего точного знания динамических свойств изоляторов и условий установки машины на месте эксплуатации.
Взаимным влиянием друг на друга колебаний по разным степеням свободы одной опоры можно пренебречь при выполнении одного из следующих условий:
- одна из составляющих вибрации, передаваемой в опорную конструкцию, является доминирующей (это не обязательно будет доминирующая составляющая вибрации самой опоры);
- цель измерений ограничена получением только общего описания поведения машины в широком диапазоне свойств изоляторов и условий места эксплуатации машины.
Следствием вышеприведенных ограничений является то, что к оценкам вибрации, распространяющейся по конкретной опорной конструкции, по результатам измерений вибрации опор в низкочастотном диапазоне (обычно на частотах ниже 200 Гц) следует относиться с повышенной осторожностью, поскольку ошибка таких оценок может быть велика. Другими словами, оценку вибрационной активности машины методом, установленным настоящим стандартом, следует рассматривать как усредненную по времени, по полосе частот, по свойствам опорных конструкций. Ее нельзя использовать для точных расчетов распространения вибрации от машины по конструкции, а можно применять только для получения некоторых статистических оценок такого распространения.
Приложение F
(рекомендуемое)
Уменьшение числа рассматриваемых степеней свободы
В принципе для описания передачи вибрации через область контакта следует рассматривать колебания с шестью степенями свободы, но в ряде практических задач целесообразен упрощенный анализ, не учитывающий колебания в некоторых направлениях движения. Возможность такого упрощения требует специального исследования, которое следует провести, в частности, при составлении испытательного кода по вибрации для определенного вида машин. Это исследование может быть проведено с двух позиций:
a) поиска доминирующих или, наоборот, незначительных составляющих вибрации, передаваемых в типичную приемную конструкцию;
b) проверки, можно ли с помощью одной, двух или трех составляющих вибрации с достаточной степенью точности характеризовать исходное возбуждение.
Подход а) наиболее полезен в диапазоне относительно низких частот для периодической вибрации и для изоляторов с приемной системой, имеющими существенно разные передаточные свойства для разных степеней свободы. Подход b) лучше использовать в диапазоне относительно высоких частот для случайной вибрации и приемной системы, передаточные свойства которой для разных направлений движения приблизительно одинаковы.
Решение уменьшить число рассматриваемых степеней свободы должно быть основано на экспериментальной проверке, выполненной для ряда типичных приемных систем, состоящих из изолятора, фундамента и других элементов, по которым распространяется вибрация (например, элементов конструкции здания). Для системы, входом которой является верхний фланец статически нагруженного изолятора, а выходом - некоторая точка в помещении, определяют шесть передаточных функций для каждой из составляющей скорости на верхнем фланце изолятора и для составляющей скорости обычно перпендикулярной к поверхности, на которой расположена выходная точка приемной системы (или звукового давления в некоторой точке помещения). Сделать это, возбуждая фланец изолятора, весьма затруднительно. Более простым способом является использование принципа взаимности (см. [4]). Но наилучшим решением можно считать измерение с использованием специальной испытательной установки 36 переходных подвижностей холостого хода для изолятора и - на основе принципа взаимности (см. [1]-[4]) - шести передаточных функций (сила - скорость или звуковое давление) для фундамента и остальной части приемной системы.
После того, как получены общие передаточные функции для всей приемной системы, в качестве входного воздействия подставляют результаты измерений шести составляющих скорости на верхнем фланце изолятора, что позволяет получить скорость (звуковое давление) на выходе приемной системы. Сократить число рассматриваемых степеней свободы можно в случаях, если вклад в значение на выходе системы какой-то составляющей скорости на входе много больше или, наоборот, много меньше остальных [подход а)] или когда эти вклады примерно равны [подход b)]. В общем случае результат такого анализа будет разным для разных частотных диапазонов.
Типичными ситуациями, когда возможно существенное упрощение описания за счет сокращения числа степеней свободы (всегда с некоторой потерей точности), являются следующие:
- изолятор (например, резиновый куб) имеет примерно одинаковые передаточные характеристики для разных направлений движения и установлен на массивный бетонный фундамент. В этом случае, как правило, для описания вибрационной активности машины можно оставить не более трех составляющих скорости;
- изолятор имеет примерно одинаковые передаточные характеристики для разных направлений движения и установлен на фундамент с примерно одинаковыми значениями входной подвижности для всех шести степеней свободы движения и высокой плотностью собственных мод;
- изолятор имеет существенно разные передаточные характеристики для разных направлений движения.
Приложение G
(рекомендуемое)
Выбор изоляторов и фундаментов
Правильный выбор изоляторов и фундаментов, удовлетворяющих целям настоящего стандарта, очень важен, и к нему необходимо подойти с максимальной ответственностью.
Чтобы получить достаточно низкое значение нижней границы диапазона частот применения метода, необходимо, чтобы изолятор обладал малой динамической жесткостью для всех степеней свободы. Предполагается, что в диапазоне частот выше
каждая опора машины совершает колебания, не ограниченные какими-либо связями, т.е. изолятор и фундамент, на который он установлен, не создают значительных динамических нагрузок на опору. Данное условие предполагает, что входная подвижность опоры и входная подвижность фундамента существенно меньше соответствующих элементов матрицы подвижности изолятора, установленного на жесткий фундамент. Это справедливо только в случае, если:
a) в изоляторе не развиваются сильные недемпфированные волновые процессы;
b) опоры машины не являются слишком легкими;
c) фундамент не является слишком легким.
Выполнение этих условий можно проверить, измерив входные подвижности опоры, изолятора и фундамента. Однако, как правило, в таких измерениях нет необходимости, поскольку:
a) из опыта хорошо известно, какие изоляторы удовлетворяют поставленным требованиям, а какие нет (см. 5.2);
b) фундамент выбирают заведомо жесткий и массивный;
c) проверку можно осуществить по окончательному результату измерений (см. 7.1), и если результаты проверки окажутся неудовлетворительными, то использовать другие изоляторы и/или фундаменты.
Опоры являются составной частью машины. Если они слишком легки, то это будет выявлено посредством испытания по 7.1. В этом случае возможны два решения:
a) выбрать изолятор, обеспечивающий минимальную динамическую нагрузку на опору;
b) провести измерения без изолятора.
Для машины с относительно легкими опорами значение верхней границы диапазона частот применения метода будет низким, а уровень вибрации данной опоры - повышенным. Возможности виброизоляции таких опор будут ограничены. Метод, установленный настоящим стандартом, не позволяет получить надежные результаты для машин с легкими опорами. Изготовителю следует, по возможности, изменить конструкцию опор машины таким образом, чтобы улучшить ее вибрационные характеристики.
Приложение H
(рекомендуемое)
Применение результатов измерений
Как указано в разделе 1, метод измерений, установленный настоящим стандартом, распространяется на машины, установленные на достаточно упругие изоляторы, которые, в свою очередь, установлены на достаточно жестком и массивном фундаменте. Требование к изоляторам особенно важно: если в условиях эксплуатации машина будет установлена на изоляторы более жесткие, чем примененные при испытаниях по настоящему стандарту, то необходимо будет определить диапазон частот (т.е. низшую частоту этого диапазона), в котором останутся справедливы результаты, полученные в соответствии с настоящим стандартом. Для этого потребуется измерить или рассчитать низшие собственные частоты колебаний массово-пружинной системы (машины на изоляторах). После этого частоту
определяют в соответствии с приложением А.
На практике часто случается, что машину устанавливают на изоляторы другого типа, нежели те, что были применены во время испытаний. Если такими изоляторами оказываются стальные пружины (что не рекомендуется с точки зрения передаваемой на опорную конструкцию вибрации), то необходимо провести испытания по 7.1 или измерить входную подвижность пружин, чтобы определить, для каких третьоктавных полос в диапазоне между и
результаты измерений вибрационной активности машины останутся справедливы. Такую проверку рекомендуется выполнять также в случае применения изоляторов сложной конструкции, включающей в себя металлические и резиновые элементы. Наоборот, если машину устанавливают на пневмопружинах, то дополнительных проверок не требуется.
Многие изоляторы имеют на своих концах фланцы достаточно жесткие и тяжелые, чтобы оказать влияние на вибрацию легких опор, особенно на высоких частотах. Если в испытаниях на вибрационную активность применялись другие изоляторы с фланцами, не оказывающими столь существенного влияния на вибрацию опор, то результаты таких испытаний также следует использовать с осторожностью. Рекомендуется проверить экспериментально, в каких полосах частот влияние фланцев оказывает существенный эффект. Таких проблем не возникает, если известно, какие изоляторы будут использованы на месте эксплуатации машины, и перед испытаниями по настоящему стандарту опоры утяжелить металлическими пластинами, аналогичными фланцам используемых изоляторов. Но лучше, если изготовитель сможет улучшить виброизоляцию машины, сделав опоры более жесткими и массивными.
Результаты измерений вибрационной активности машины могут быть использованы для расчетов вибрации, передаваемой через изоляторы и фундамент на конструкцию и для оценки звука, излучаемого этой конструкцией. Для таких расчетов необходимо иметь данные о передаточных свойствах упругих изоляторов в виде переходных характеристик для всех степеней свободы, а также о передаточных свойствах фундамента и других элементов приемной системы.
На практике звуковое излучение, порожденное вибрацией работающей машины, переданной через изоляторы, зачастую не является преобладающим. Во многих случаях больший вклад дает шум, порожденный, например:
a) вследствие непосредственной акустической эмиссии;
b) передачей через воздушное пространство между машиной и элементами конструкции приемной системы;
c) вибрацией, переданной по кабелям, рукавам, валам, трубопроводам;
d) выхлопом или всасыванием.
Это приводит к тому, что снижение шума за счет оптимального выбора изоляторов может не превысить 5-10 дБ. Для достижения большего эффекта необходимо принять меры по снижению шума, порожденного иными способами, нежели прохождение вибрации через изолятор в приемную систему (см. [1], [5]-[7]).
Библиография
[1] | Verheij J.W. Multi-path sound transfer from resiliently mounted shipboard machinery. Doctoral thesis, Delft University, TNO Institute of Applied Physics, 1982 |
[2] | Ten Wolde T. Reciprocity experiments on the transmission of sound in ships. Doctoral thesis, Delft University, TNO Institute of Applied Physics, 1973 |
[3] | Verheij J.W. Measuring sound transfer through resilient mountings for separate excitation with orthogonal translation and rotations. Proceedings Inter Noise 80, Miami, pp.723-726 |
[4] | Ten Wolde T., Verheij J.W. and Steenhoek H.F. Reciprocity method for the measurement of mechano-acoustical transfer functions. J. Sound Vibr., 42 (1), 1975, pp.49-55 |
[5] | Heckl M. The different ways of sound transmission in and around resilient mounts. Proceedings International Symposium on Shipboard Acoustics. (Janssen J.H., Ed.) Elsevier, Amsterdam, 1977, pp.155-165 |
[6] | Steenhoer H.F. Insertion loss of resilient mounting systems in ships. Proceedings, International Symposium on Shipboard Acoustics. (Janssen J.H., Ed.) Elsevier, Amsterdam, 1977, pp.162-182 |
[7] | Jacobsen F. and Ohlrich M. Vibrational power transmission from multipoint mounted machinery to supporting structure, Report No.35, Acoustics Laboratory, Technical University of Denmark, 1986 |
Электронный текст документа
и сверен по:
, 2010
