ГОСТ Р 51028-97
Группа Э50
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВО ЗАЩИТЫ ОТ ОШИБОК АППАРАТУРЫ ПЕРЕДАЧИ ДАННЫХ
Методы защиты
Error control equipment for DCE.
Methods of error correcting
ОКС 33.040.40*
ОКСТУ 6656
_____________________
* В Указателе "Национальные стандарты" 2004 год указан ОКС 33.040.20. - Примечание "КОДЕКС".
Дата введения 1998-01-01
Предисловие
1 РАЗРАБОТАН Научно-производственным кооперативом "Интердата"
ВНЕСЕН Всероссийским научно-исследовательским институтом "Эталон"
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 6 февраля 1997 г. N 40
3 Стандарт соответствует требованиям рекомендации Международного Союза Электросвязи (Синяя книга, Мельбурн 1988): V.42
4 ВВЕДЕН ВПЕРВЫЕ
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт распространяется на устройства защиты от ошибок (УЗО) аппаратуры передачи данных (АПД), работающих в двухточечных и последовательно соединенных каналах передачи данных, обеспечивающих одновременный двусторонний обмен данными, сопрягающихся с оконечным оборудованием данных (ООД) и устройством преобразования сигналов (УПС).
Стандарт устанавливает процедуры передачи информации и защиты от ошибок для использования в дуплексных АПД.
Факторы, влияющие на определение значения выдержки таймера подтверждения Т401, приведены в приложении А; цепи стыка С2, используемые в процедуре, приведены в приложении Б.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 17657-79 Передача данных. Термины и определения
ГОСТ 18145-81 Цепи на стыке С2 аппаратуры передачи данных с оконечным оборудованием при последовательном вводе-выводе данных. Номенклатура и технические требования
ГОСТ 25007-81 Стык аппаратуры передачи данных с каналами связи систем передачи с частотным разделением каналов. Основные параметры сопряжения
ГОСТ 26113-84 Процедуры управления звеном передачи данных. Элементы балансных процедур при одновременной двусторонней передаче информации и защиты от ошибок
ИСО 8885-93 Передача данных. Процедуры управления звеном данных верхнего уровня. Содержимое и формат поля информации кадра XID общего назначения.
3 ОПРЕДЕЛЕНИЯ
В настоящем стандарте применяют термины по ГОСТ 17657, а также следующие термины:
Станция передачи данных - совокупность оконечного оборудования и аппаратуры передачи данных.
Команда - предписание, относящееся к управлению процедурой исправления ошибок, содержащееся в поле управления кадра.
Ответ - сообщение о выполнении команды, содержащееся в поле управления кадра
Фаза процедур управления (фаза) - часть процедуры управления процессом исправления ошибок.
Совокупность всех фаз определяет полностью процедуру управления процессом исправления ошибок.
Состояние фазы процедуры управления (состояние) - часть процедур, входящая в фазу и выполняющая законченную функцию внутри фазы.
4 ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
УЗО - устройство защиты от ошибок
АПД - аппаратура передачи данных
ООД - оконечное оборудование данных
УПС - устройство преобразования сигнала
Т401 - таймер подтверждения
Т400 - таймер фазы обнаружения
N400 - таймер числа повторных ошибок
N401 - таймер максимального числа октетов в поле информации I-кадра
К - максимальное число ожидаемых подтвержденных I-кадров
V(S) - переменная состояния
V(A) - переменная подтверждения
N(S) - номер последнего подтвержденного I-кадра
V(R) - переменная состояния приема
N(R) - порядковый номер передачи
UI - ненумерованная информация (Unnumbered information)
BRK - прерывание
BRKACK - подтверждение прерывания
V(A) - переменная подтверждения
N(SB) - переменная состояния передачи разрыва
N(RB) - переменная состояния приема разрыва
FCS - проверочные биты
РОС - решающая обратная связь
DLCI - идентификатор соединения по звену данных (Data link connection identifier)
C/R - бит команда/ответ
FA - бит расширения поля адреса
Р - бит запроса
P/F - бит запроса/ответа
REJ - неприем (Reject)
I - информация
RR - готов к приему (Receive ready)
RNR - не готов к приему (Receive not ready)
SREJ - выборочный неприем (Selective reject)
SABME - установить расширенный асинхронный балансный режим (Set asynchronous balanced mode extend)
DM - режим разъединения (Disconnect mode)
DISC - разъединено (Disconnect)
UA - ненумерованное подтверждение (Unnumbered acknowledgment)
FRMR - некорректный кадр (Frame reject)
XID - идентификация обмена (Exchange indentification)
TEST - проверка
DS - необязательный вариант "Обработка прерываний"
GI - идентификатор группы
GL - длина группы
PI - идентификатор параметра
PL - длина параметра
PV - значение параметра
FI - идентификатор формата
ADP - комбинация обнаружения ответчика
ODP - комбинация обнаружения инициатора
5 ФАЗЫ ПРОЦЕДУР УПРАВЛЕНИЯ ПРОЦЕССОМ ИСПРАВЛЕНИЯ ОШИБОК
5.1 АПД должна принимать от ООД стартстопные данные и передавать их в синхронном режиме (протокол LAPM - Link Access Procedure for Modems).
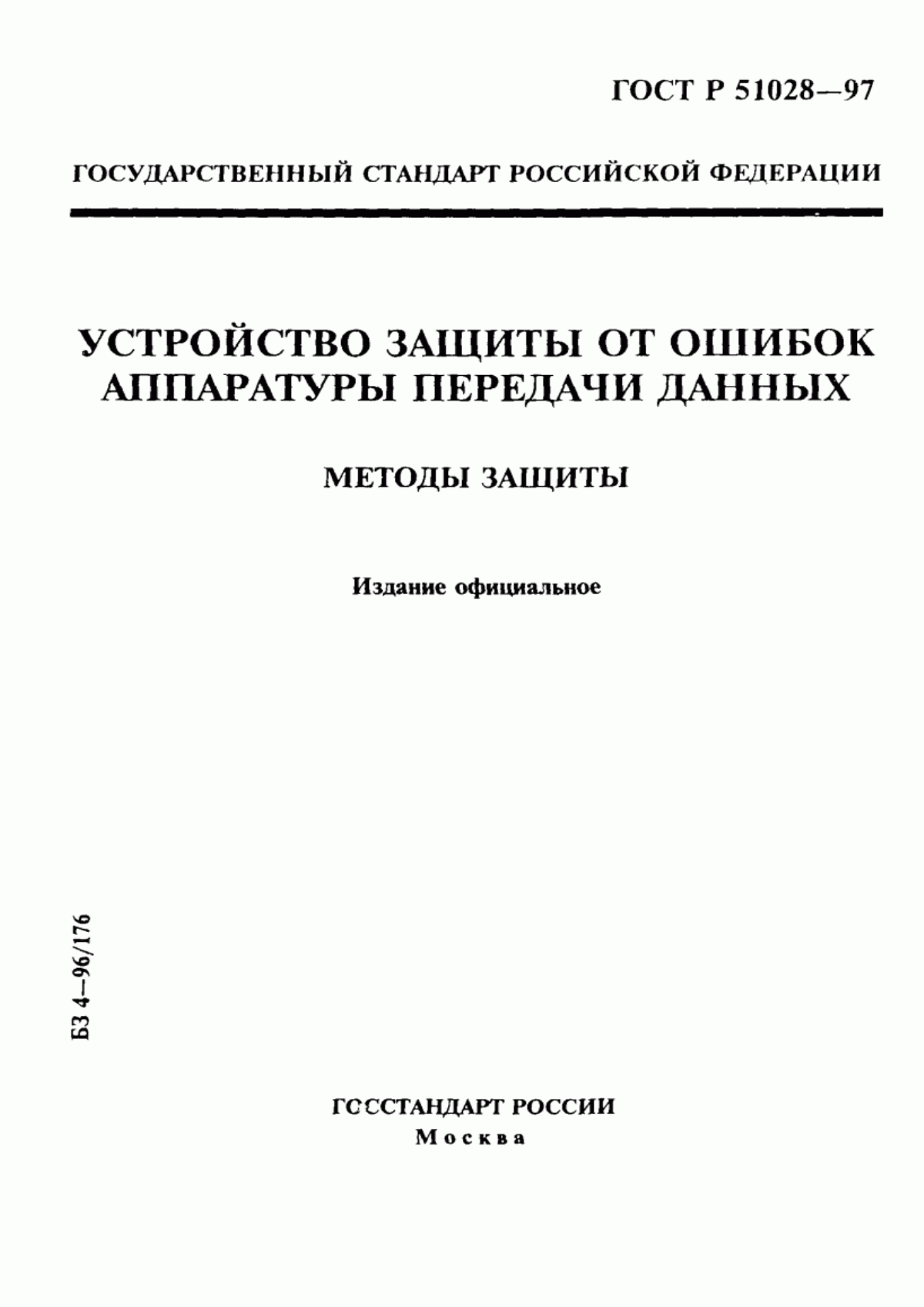
АПД может состоять из УЗО и УПС, объединенных в одно устройство, или отдельных изделий УЗО и УПС в соответствии с рисунком 1.
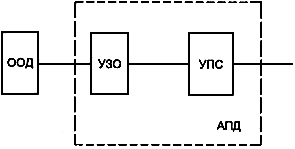
Рисунок 1 - Ошибкоисправляющая АПД
Взаимодействие ООД и АПД должно осуществляться в соответствии со стыком устройств защиты от ошибок с оконечным оборудованием данных по ГОСТ 18145.
Взаимодействие АПД с каналом связи должно осуществляться в соответствии со стыком устройств преобразования сигналов с каналом связи по ГОСТ 25007.
5.2 Полный цикл функционирования процедуры передачи информации и защиты от ошибок должен состоять из пяти последовательных фаз:
- "Обнаружение",
- "Согласование/индикация",
- "Установление логического соединения",
- "Передача информации",
- "Завершение логического соединения".
Примечание - Допускаются обходы фаз. Причины, вызывающие обход, приведены ниже.
5.3 Фаза "Обнаружение" должна определять способность удаленной АПД исправлять ошибки.
В фазе "Обнаружение" УЗО должно находиться непосредственно после установления физического соединения и включения.
5.4 В фазе "Согласование/индикация" должно происходить согласование и/или индикация параметров и факультативных процедур, которые определяют работу УЗО, если это необходимо.
Примечание - При отсутствии необходимости в согласовании допускается обход этой фазы и переход непосредственно к фазе "Установление логического соединения" или к фазе "Завершение логического соединения", если нет необходимости в передаче информации.
5.5. В фазе "Установление логического соединения" должна происходить подготовка условий, необходимых для передачи данных, и переход из фазы "Обнаружение" или "Согласование/индикация" в фазу "Передача информации".
Примечание - Допускается переход из фазы "Установление логического соединения" в фазу "Завершение логического соединения" в результате отказа одной из станций передавать информацию по какой-либо причине.
5.6 В фазе "Передача информации" должна осуществляться передача информации от источника к получателю. После завершения передачи информации по инициативе источника или получателя должен происходить переход к фазе "Завершение логического соединения".
Примечание - В результате ухудшения характеристик канала связи или отказа оборудования на одной из станций могут возникнуть условия, когда передача информации невозможна. В этом случае допускается переход к фазе "Завершение логического соединения" или к фазе "Установление логического соединения".
5.7 В фазе "Завершение логического соединения" должны подготавливаться условия для полного логического разъединения станций.
6 СИСТЕМНЫЕ ПАРАМЕТРЫ
6.1 В различных процедурах протокола защиты от ошибок должны использоваться таймеры, необходимые для правильного функционирования протокола. Запуск или перезапуск таймера должен означать, что таймер устанавливается на подсчет от предварительно установленного значения. Остановка таймера должна означать, что он больше не считает и его показание в момент остановки не имеет значения.
6.2 Таймер фазы обнаружения (Т400) должен определять интервал времени, в течение которого УЗО (вызывающее или отвечающее) ожидает ADP или ODP. Информация об этом таймере не должна передаваться в кадрах XID. Безусловное значение таймера Т400 равно 750 мс.
Примечание - При реализации может быть предусмотрен механизм установки пользователем значений таймера, отличных от безусловного значения.
6.3 Таймер подтверждения (Т401) должен определять интервал времени, в течение которого УЗО ожидает подтверждения, прежде чем обратиться к другому действию (например, к передаче какого-либо кадра). Информация об этом таймере не должна передаваться в кадрах XID. Значения таймеров Т401 на местной и удаленной АПД могут быть различны.
6.4 Таймер N400 должен определять максимальное число повторных попыток УЗО выполнить какую-либо процедуру, требующую ответа. Информация об этом таймере не должна передаваться в кадрах XID. Значения таймеров N400 на ближней и удаленной АПД могут быть различны. Безусловное значение таймера N400 равно 1.
6.5 Таймер N401 должен определять максимальное число октетов в поле информации I-кадра, кадров XID, UI или TEST. Безусловное значение таймера N401 равно 128 октетам. С помощью кадра XID отдельно для каждого направления может быть согласовано другое значение таймеров N401.
6.6 Размер окна должен определять максимальное число ожидающих подтверждения I-кадров. Безусловное значение
равно 15 для обоих направлений передачи. С помощью кадра XID отдельно для каждого направления может быть согласовано другое значение
.
6.7 Каждое соединение должно иметь соответствующую переменную состояния V(S). Переменная V(S) должна обозначать порядковый номер следующего I-кадра, который должен быть передан. Значение переменной V(S) должно меняться от нуля до и увеличивается на единицу при каждой успешной передаче I-кадра. Значение переменной V(S) должно не превышать значения переменной V(A) более чем на максимальное число
ожидающих подтверждения I-кадров.
6.8 Каждое соединение должно иметь соответствующую переменную состояния подтверждения V(A), указывающую последний подтвержденный кадр. Значение V(A)-1 должно быть равно номеру N(S) последнего подтвержденного I-кадра. Переменная V(A) должна принимать значения от нуля до и обновляться действительными значениями номера N(R), получаемыми от корреспондента. Действительным значением номера N(R) считают значение, находящееся в диапазоне.
6.9 Каждое соединение должно иметь соответствующую переменную состояния приема V(R), обозначающую порядковый номер следующего по порядку I-кадра, который, как ожидается, должен быть принят. Переменная V(R) должна принимать значения от нуля до и увеличивается на единицу при приеме свободного от ошибок очередного I-кадра, у которого номер N(S) равен значению переменной V(R).
6.10 Каждый передаваемый I-кадр должен содержать порядковый номер передачи N(S). В момент передачи I-кадра значение номера N(S) должно устанавливаться равным значению переменной V(S).
6.11 Каждый передаваемый I- или S-кадр должен содержать ожидаемый порядковый номер N(R) следующего принимаемого I-кадра. В момент передачи I- или S-кадра значение номера N(R) должно устанавливаться равным значению переменной V(R). Значение номера N(R) указывает, что передавшее номер N(R) УЗО правильно приняло все I-кадры с номерами до N(R)-1 включ.
6.12 Чтобы различать первоначальный и повторный кадры UI, передающие информацию о разрыве, УЗО должно выполнять операции порядковой нумерации кадров UI по модулю 2 в поле информации кадров UI. Для этой цели должен использоваться бит 8 первого октета в поле информации. Если передается сообщение BRK, то этот бит должен являться порядковым номером передачи разрыва N(SB), если передается сообщение BRKACK, то этот бит должен являться порядковым номером приема разрыва N(RB).
6.13 Переменная состояния передачи разрыва V(SB) должна выражать значение номера N(SB) в следующем сообщении BRK. Переменная V(SB) должна дополняться каждый раз, когда переданное сообщение BRK правильно подтверждается сообщением BRKACK. Вначале, когда установлено физическое соединение, значение переменной V(SB) должно устанавливаться в нуль, она не должна сбрасываться даже при повторном установлении соединения.
6.14 Переменная состояния приема разрыва V(RB) должна выражать ожидаемое значение номера N(SB) в следующем сообщении BRK, которое должно быть принято. Если номер N(SB) в следующем принятом сообщении BRK равен значению переменной V(RB), то значение переменной следует дополнить до передачи сообщения BRKACK. Вначале, когда установлено физическое соединение, значение переменной V(RB) должно устанавливаться в нуль, она не должна сбрасываться даже при повторном установлении соединения.
7 ТИПЫ КАДРОВ
7.1 Информация должна передаваться с помощью кадров, которые открываются и закрываются флагами (01111110).
Примечание - При последовательной передаче кадров по каналу допускается использовать одну и ту же комбинацию флага в качестве закрывающей для одного кадра и открывающей для последующего кадра. Если нет необходимости в передаче по каналу кадров, то возникающий временной промежуток между кадрами заполняется непрерывно следующими друг за другом комбинациями флаг.
7.2 Должны использоваться два вида структуры кадров в соответствии с рисунком 2.
_________________
* He все типы кадров имеют поле информации
Рисунок 2 - Структура кадра
Максимальный размер поля адреса должен быть ограничен двумя октетами. Поле управления должно состоять из двух октетов для кадров с порядковыми номерами и одного октета для кадров без порядковых номеров.
7.3 Для обеспечения прозрачности должна производиться проверка в передатчике содержимого кадра между открывающим и закрывающим флагами и вставления бита "0" после каждой последовательности из пяти идущих подряд битов "1". Приемник должен проверять содержимое кадра между открывающим и закрывающим флагами и отбрасывать любой бит "0", который следует непосредственно после пяти идущих подряд битов "1".
7.4 Вводят три типа кадров:
- информационный (I-кадр);
- служебный контролирующий (S-кадр);
- служебный ненумерованный (U-кадр).
7.5 Информационный кадр (I-кадр) должен содержать информационное поле, используемое для размещения информации, получаемой от источника информации. Длина информационной части может быть любой, кратной байту (8-элементному знаку), но ограниченной сверху предельной длиной используемого помехоустойчивого ()-кода. По умолчанию длина информационной части равна 128 байтам.
7.6. Служебный контролируемый кадр (S-кадр) используют для выполнения функций решающей обратной связи (РОС):
- подтверждения I-кадров;
- запроса повторной передачи одного или нескольких I-кадров;
- запроса временного прекращения передачи I-кадров.
7.7 Служебный ненумерованный кадр (U-кадр) используют для обеспечения дополнительных процедур управления соединением и передачи информации без номеров (установлением и завершением соединения, тестирования, идентификации и др.).
7.8 Структура поля адреса должна соответствовать приведенной в таблице 1.
Таблица 1
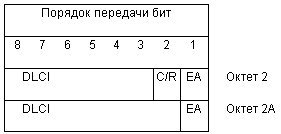
Поле адреса должно содержать идентификатор соединения по звену данных - Data Link Connection identifier (DLCI), бит команда/ответ (C/R) и бит расширения поля адреса (ЕА). DLCI должен использоваться при передаче информации между двумя ООД (местной и удаленной) и служить для идентификации соединения между ними. Значение DLCI равно 0 (00000000). Бит C/R должен определять, является ли кадр командой или ответом. Командный кадр должен содержать адрес удаленной станции, ответный кадр должен содержать адрес местной станции. Для заданного соединения значение DLCI в поле адреса должно остаться одним и тем же, а бит C/R должен определяться в таблице 2.
Таблица 2
Команда/ответ | Направление | Значение C/R |
Команда | Инициатор | 1 |
Ответчик | 0 | |
Ответ | Инициатор | 0 |
Ответчик | 1 |
Примечание - Размер поля адреса может быть расширен. Первый передаваемый бит каждого октета в поле адреса указывает, является ли октет последним в этом поле. Если ЕА=1, то это означает, что этот октет является последним в этом поле адреса. Если ЕА=0, то за этим октетом следует второй октет поля адреса. Когда используют факультативное двухоконное поле адреса, то в состав DLCI включают биты 8...2 октета 2А в соответствии с таблицей 1.
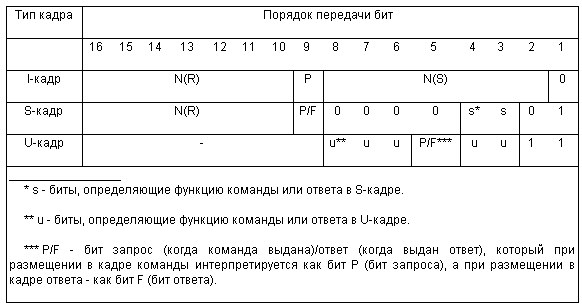
7.9 Структура поля управления для всех трех типов кадров должна соответствовать таблице 3.
Таблица 3
7.10 Каждый I-кадр должен последовательно нумероваться и может иметь номер от нуля до , где
128 - модуль порядковых номеров.
7.11 В каждом кадре должно быть поле комбинации проверки кадра (FCS). В этом поле должны размещаться проверочные биты. Могут использоваться два циклических кода с образующими многочленами
![]() или
или
![]()
В первом случае поле FCS должно состоять из двух октетов, во втором - из четырех.
Проверочные биты должны быть равны дополнению до единицы суммы по модулю два следующих двух чисел:
- остатка от деления ![]() [или
[или
где - число битов в кадре, находящихся между последним битом открывающего флага и первым битом FCS, за исключением битов, вставляемых для обеспечения прозрачности;
- остатка от деления на образующий многочлен [или
] произведения
[или
] на содержимое кадра, находящееся между последним битом открывающего флага и первым битом FCS, за исключением битов, вставляемых для обеспечения прозрачности.
При типичной реализации в передатчике первоначальное содержимое регистра в устройстве, вычисляющем остаток от деления, устанавливают равным одним единицам, а затем изменяют при делении содержимого полей адреса, управления и информации на образующий многочлен [или
]. Затем определяют дополнение остатка от деления до единицы.
При типичной реализации в приемнике первоначальное содержимое регистра в устройстве, вычисляющем остаток от деления, устанавливают равным одним единицам. При отсутствии ошибок проверочные биты должны быть равны 0001 1101 0000 1111, при использовании образующего многочлена , или 1100 0111 0000 0100 1101 1101 0111 1011, при использовании образующего многочлена
).
7.12 Кадр считают недействительным, если он:
- не ограничен должным образом двумя флагами;
- содержит менее пяти (семи) октетов между флагами в кадрах с порядковыми номерами и менее четырех (шести) октетов между флагами в кадрах без порядковых номеров в случае 16-битовой (32-битовой) FCS;
- содержит нецелое число октетов до вставления битов "нуль" или после отбрасывания битов "нуль";
- имеет ошибки;
- имеет поле адреса, которое содержит более двух октетов или имеет значение DLCI, не поддержанное приемником.
Недействительные кадры отбрасывают без уведомления передатчика. Прием такого кадра не требует выполнения каких-либо действий. В качестве альтернативной процедуры в этом случае можно передать S-кадр с командой REJ.
7.13 Получение семи или более идущих подряд битов "1" интерпретируют как аннулирование. Принимаемый в это время кадр игнорируют.
7.14 I-кадр идентифицируют в соответствии с таблицей 3 первым передаваемым битом области управления, бит 1, если этот бит равен 0, то принятый кадр является I-кадром.
S-кадр идентифицируют в соответствии с таблицей 3 первыми двумя передаваемыми битами области управления, биты 1 и 2, если эти биты составляют двоичное число 01, то принятый кадр является S-кадром.
U-кадр идентифицируют в соответствии с таблицей 3 первыми двумя передаваемыми битами области управления, биты 1 и 2, если эти биты составляют двоичное число 11, то принятый кадр является U-кадром.
8 КОМАНДЫ И ОТВЕТЫ
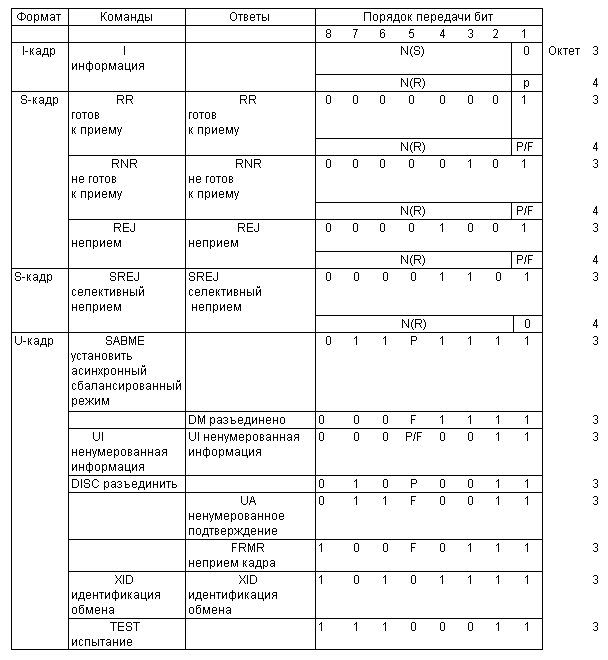
8.1 Команды и ответы используют для управления процедурой передачи информации и переключением режимов работы УЗО. Перечень команд и ответов, передаваемых в I-, S- и U-кадрах, должен соответствовать таблице 4. Те типы кадров, которые не входят в таблицу 4, считают неопределенными командами и/или ответами. Для определения команды или ответа, а также для определения бита Р или F в кадре используют следующее правило адресации:
- кадры, содержащие команды, передаются c адресом удаленной станции;
- кадры, содержащие ответы, передаются с адресом местной станции.
Таблица 4
8.2 Команды и ответы I, RR, RNR, REJ и SREJ используют в режиме передачи информации для обмена информацией между местной и удаленной станциями и для организации контроля за прохождением этого обмена.
8.3 Команда "Информация" - "Information" (I) должна являться признаком наличия в I-кадре информации от источника. Содержащийся в I-кадре номер N(S) должен указывать на порядковый номер передаваемого I-кадра, а номер N(R) должен подтверждать все принятые I-кадры, переданные удаленной станцией с номерами N(S)<=N(R)-1.
8.4 S-кадры, содержащие команды и ответы RR, RNR, REJ и SREJ, не должны содержать информационного поля, и поэтому их передача и прием УЗО не должны увеличивать порядковые переменные V(S) и V(R) на передатчике и приемнике.
8.5 Команду и ответ "Готов к приему" - "Receive ready" (RR) используют для подтверждения ранее принятых I-кадров с номерами до N(R)-1 включ. Кроме того, ответ RR должен указывать на готовность принимать следующие I-кадры, и поэтому сообщает о снятии состояния "Занято", введенного ранее передачей команды RNR. Команда RR с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.6 Команду и ответ "Не готов к приему" - "Receive not ready" (RNR) используют для указания на состояние "Занято" на станции, ее посылающей, то есть временной неспособности принимать дополнительные входящие I-кадры. Получив такую команду или ответ, станция должна прекратить передачу I-кадров. Значение номера N(R) в кадре RNR должно подтверждать все I-кадры с номерами до N(R)-1 включ. Команда RNR с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.7 Команду и ответ "Неприем" - "Reject" (REJ) используют для запроса повторной передачи I-кадров, начиная с кадра, имеющего номер N(R). Значение N(R) должно подтверждать I-кадры с номерами до N(R)-1 включ. Кроме того, кадр REJ должен указывать на снятие состояния "Занято", введенного передачей кадра RNR. Команда REJ с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.8 Команду и ответ "Выборочный неприем" - "Selective reject" (SREJ) используют для запроса повторной передачи только одного I-кадра с номером N(R). Бит P/F кадра SREJ всегда установлен в нуль, номер N(R) не должен подтверждать каких-либо I-кадров.
8.9 Ненумерованные U-кадры используют для указания состояния посылающих их станций.
8.10 Команду "Установить расширенный асинхронный балансный режим" - "Set asynchronous balanced mode extend" (SABME) используют для перевода станции в фазу "Установление соединения". В команде SABME должно отсутствовать поле информации. Удаленная станция должна подтвердить прием команды SABME путем передачи ответа UА. После приема этой команды переменные состояния V(S), V(A) и V(R) устанавливают в нуль. Передача команды SABME должна указывать на прекращение всех особых состояний.
Переданные ранее I-кадры и не подтвержденные к моменту обработки этой команды должны остаться неподтвержденными и отбрасываются.
8.11 Команду "Разъединено" - "Disconnect" (DISC) используют для перехода в фазу "Завершение логического соединения". В командe DISС отсутствует поле информации. Станция, принявшая команду DISС, должна подтвердить получение команды DISC передачей ответа UA. Станция, передавшая команду DISC, по получении ответа UA или DM должна заканчивать соединение.
Переданные ранее I-кадры и не подтвержденные к моменту обработки этой команды должны оставаться неподтвержденными и отбрасываются.
8.12. Команду и ответ "Ненумерованная информация" - "Unnumbered information" (UI) используют для передачи управляющей информации, не входящей в поток информации от ООД, которая передается l-кадрами. Эта информация может быть связана с потоком информации от ООД (например, с сигналом "Прерывание"). Поле управления кадра UI не должно содержать порядковых номеров. Бит P/F устанавливают в нуль.
Первый октет информационной области кадра UI кодируют для указания применения области в соответствии с таблицей 5.
Таблица 5
Тип сообщения | 8 7 6 5 4 3 2 1 |
BRK | X 1 0 0 0 0 0 0 |
BRKACK | X 1 1 0 0 0 0 0 |
Примeчаниe - Значения Х устанавливаются, как описано ниже | |
Сообщение BRK кодируют в соответствии с таблицей 6. Бит 8 первого октета используют как порядковый номер по модулю два.
Таблица 6
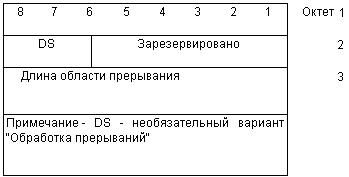
Бит D (бит 8 октета 2) должен указывать, следует ли сбрасывать данные, накопленные ранее, но еще не доставленные. Если D=0, данные не сбрасываются, если D=1, то данные сбрасываются.
Бит S (бит 7 октета 2) должен указывать, доставлять область прерывания в порядке следования по отношению к данным (S=0) или область прерывания должна предшествовать всем ранее принятым, но не доставленным данным (S=1).
В октете 3 в двоичном исчислении кодируют длину области прерывания в отрезках времени, состоящих из 10 мс. Для указания продолжительности прерывания более 2,54 с используют значение "11111111". Отсутствие длины области прерывания в принятом сообщении должно восприниматься как прерывание с предварительно определенной длиной.
Сообщение BRKACK должно содержать только один октет. Бит 8 этого октета используют в качестве порядкового номера по модулю два.
8.13 Ответ "Ненумерованное подтверждение" - "Unnumbered acknowledgement" (UA) используют для подтверждения получения и приема команд установки режима (SABME и DISC). Принятые команды установки режима не должны обрабатываться, пока не будет передан ответ UA. В ответе UА должно отсутствовать поле информации. Передача ответа UA должна указывать на прекращение состояния "Занято", о котором было сообщено раньше передачей RNR из этой же станции.
8.14 Ответ "Режим разъединения" - "Disconnect mode" (DM) используют для сообщения, что передающая его станция логически отключена и/или не может установить соединение. В ответе DM должно отсутствовать поле информации.
8.15 Ответ "Некорректный кадр" - "Frame reject" (FRMR) используют для сообщения о некорректной ситуации, возникшей на одной из станций в результате обработки кадра, принятого без обнаруженной ошибки.
Примечание - Такая ситуация может возникнуть в результате приема в команде или ответе неопределенного или невыполнимого поля управления, приема кадра с ненормальной длиной, приема недействительного номера N(R). Неопределенным считают поле управления, у которого кодирование не совпадает с таблицей 4. В этом ответе непосредственно за полем управления посылают поле информации из пяти октетов, содержащее обоснование ответа FRMR. Формат этого поля информации соответствует таблице 7.
Таблица 7
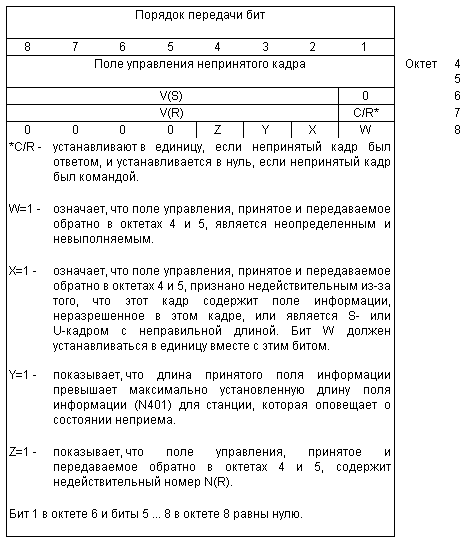
Поле управления непринятого кадра должно являться полем управления полученного кадра, который вызвал неприем кадра. Если непринятый кадр является U-кадром, то поле управления непринятого кадра размещают в октете 4, при этом октет 5 устанавливают в 00000000.
8.16 Команду и ответ "Идентификация обмена" - "Exchange Identification" (XID) используют для передачи общей информации об идентификации обмена. В поле управления кадра XID не должно быть порядковых номеров. Бит P/F кадра XID устанавливают в нуль.
Поле информации кадров XID используют для согласования/индикации значений параметров. Общая структура поля информации кадра XID должна соответствовать рисунку 3.
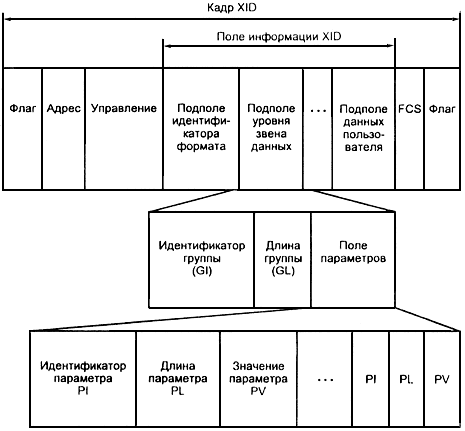
Рисунок 3 - Общий формат поля информации XID
Поле информации должно состоять из:
- подполя идентификатора формата;
- несколько подполей уровня звена данных;
- подполя данных пользователя.
Подполе идентификатора формата (FI) должно состоять из одного октета и являться первым октетом поля информации кадра XID. Идентификатор формата FI кодируют так, чтобы он мог обозначать 128 различных форматов, стандартизированных ИСО 8885, и 128 различных форматов, определяемых пользователем. Каждый стандартизированный ИСО 8885 формат должен прикрепляться к отдельному значению FI, и только такой формат, определенный в данный момент, является форматом "общего назначения".
Подполя уровня звена данных используют для указания на различные характеристики уровня звена данных, например на рабочие параметры. Все подполя содержат идентификатор группы (GI) длиной один октет, длину группы (GL) длиной в два октета и поле параметров, длина которого задана в GL. Поле параметров также разделяют на несколько наборов из идентификатора параметра (PI), длины параметра (PL) и значения параметра (PV). Длина параметра должна иметь только один октет.
Идентификатор группы GI должен указывать на подполе данных пользователя, используемое совместно с FI "общего назначения".
Для согласования/индикации значений параметров и факультативных процедур подполе FI должно кодироваться как "10000010".
При согласовании/индикации должно присутствовать только подполе уровня звена данных, связанное с "согласованием параметра". Это подполе должно иметь значение GI, равное "10000000". Длина этого подполя (GI) должна зависеть от реальной информации, подлежащей передаче.
Каждый параметр, подлежащий согласованию и/или индикации, обозначают с помощью идентификатора параметра PI. Значения PI должны соответствовать таблице 8.
Таблица 8
PI | Параметр/процедура | Единицы | |
Десятичный | Двоичный | ||
3 | 00000011 | Дополнительные функции HDLC | Октеты Примечание 1 |
5 | 00000101 | Максимальная длина поля информации, направление передачи | Биты Примечание 2 |
6 | 00000110 | Максимальная длина поля информации, направление приема | Биты Примечание 2 |
7 | 00000111 | Размер окна ( | Кадры |
8 | 00001000 | Размер окна ( | Кадры |
Примечания 1 Длина этого поля равна 3 октетам, то есть PI=3. Биты этих октетов образуют 24-битовый шаблон, в котором каждый бит выделяется для конкретной дополнительной функции HDLC. Бит 1 этой маски является младшим битом октета 1 и передается первым, бит 9 является младшим битом октета 2 и т.д. Для факультативных процедур выделены биты: 3 - процедура селективной повторной передачи (SREJ), 14 - процедура шлейфного испытания (TEST), 17 - процедура с расширенной FCS (32-битовая FCS). Битовая позиция, установленная в единицу, означает запрос/согласие на использование процедуры. Битовая позиция, установленная в 0, означает отсутствие запроса/отсутствие согласия на использование процедуры. Передатчик командного кадра XID устанавливает в единицу битовые позиции 2, 4, 8, 9, 12 и 16. Передатчик ответного кадра XID также устанавливает эти битовые позиции в единицу, однако, если бит 17 установлен в единицу, то бит 16 устанавливается в нуль. Приемник этих кадров игнорирует эти битовые позиции. 2 Величина N401 определена в октетах, однако при согласовании используют единицы бит. 3 Значение PL должно быть минимальным числом октетов, необходимых для выражения значения параметра. 4 Значение параметра для PI, равного 5, 6, 7 и 8, должно иметь двоичное кодирование. Первый бит в октете является младшим битом. Если для выражения значения параметра нужно несколько октетов, первый октет содержит старшие биты. | |||
Подполе данных пользователя может присутствовать независимо от выполнения согласования и/или индикации. Это подполе должно иметь значение GI, равное "11111111".
8.17 Команду "Проверка" - "Test" (TEST) используют для проведения шлейфных испытаний между двумя УЗО. В поле управления кадра TEST не должно быть порядковых номеров. Бит Р кадра TEST устанавливают в нуль.
9 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ "ОБНАРУЖЕНИЕ"
9.1 Если между местной и удаленной УПС установлено физическое соединение, то инициатор соединения должен передать комбинацию обнаружения инициатора (ODP) - 0 1000 1000 1 11 ... 11 0 1000 1001 1 11 ... 11.
Комбинация ODP должна состоять из знака DC1 с проверкой на четность, далее следуют от 8 до 16 единиц, затем следует знак DC1 с проверкой на нечетность, после чего следуют от 8 до 16 единиц. Комбинация ODP должна передаваться в течение выдержки таймера Т400 или до получения комбинации обнаружения ответчика (ADP).
Передача всегда должна вестись с использованием функции скремблера в УПС с синхронизацией от тактовой частоты, выделенной из тонального сигнала.
Инициатор соединения должен проверять входящий от УПС поток битов на наличие ADP. Правильно получив знаки на менее двух смежных ADP, инициатор соединения должен принимать решение, что эта комбинация обнаружена.
Если комбинация ADP не обнаружена в течение интервала Т400, то после завершения повторения последней ODP инициатор соединения должен принимать решение, что ответчик не способен работать в режиме исправления ошибок. В этом случае инициатор соединения переключается на режим без исправления ошибок.
Если комбинация ADP получена до истечения времени таймера Т400, то инициатор соединения должен прекратить передачу комбинации ODP и перейти в фазу "Согласование/индикация".
9.2 На приеме, получив индикацию об успешном установлении соединения между УПС, ответчик должен передать биты 1 (рабочее состояние) до окончания фазы обнаружения (прием комбинации ODP или обнаружения начала фазы "Согласование/индикация" - получение непрерывной последовательности флагов).
Ответчик должен проверить входящий поток битов от УПС на наличие комбинации ODP. Правильно получив не менее четырех знаков DC1 с чередующейся проверкой на четность и нечетность, ответчик должен принимать решение, что комбинация ODP обнаружена.
Если после установления физического соединения комбинация ODP в течение выдержки таймера N400 не обнаружена, и не будет обнаружено начало фазы "Согласование/индикация" в течение этого же интервала, то ответчик должен принять решение, что инициатор соединения не способен работать в режиме исправления ошибок, и переключиться на режим без исправления ошибок.
Если комбинация ODP обнаружена, то ответчик должен принять решение, что инициатор соединения способен работать в режиме исправления ошибок и требовать перехода в фазу "Согласование/индикация". Ответчик должен передать десять раз одну из комбинаций обнаружения ответчика (ADP):
- 0 1010 0010 1 11 ... 11 0 1100 0010 1 11 ... 11, (Е) и (С), разделенные 8 ...16 единицами, если режим исправления ошибок поддерживается;
- 0 1010 0010 1 11 ... 11 0 0000 0000 1 11 ... 11, (У) и (нуль), разделенные 8 ...16 единицами, если режим исправления ошибок не поддерживается.
Биты в этих комбинациях перечисляют слева направо в порядке передачи, то есть бит младшего разряда передается первым. Передачу всегда ведут с использованием функции скремблера в УПС с синхронизацией от тактовой частоты, выделенной из тонального сигнала. То есть без использования в УПС какого-либо внутреннего средства подстройки под асинхронную скорость, которое могло бы быть использовано в режиме без исправления ошибок.
10 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ "СОГЛАСОВАНИЕ/ИНДИКАЦИЯ"
10.1 УЗО должно переходить в фазу "Согласование/индикация" при наступлении одного из следующих событий:
- обнаружена комбинация ADP
- или если его не удовлетворяют безусловные значения параметров и процедур.
Иначе оно должно переходить сразу в фазу "Установление логического соединения".
10.2 Процедура "Согласование/индикация" начинается передачей кадра XID. Если УЗО находится в состоянии "соединено", то сначала передают на удаленный конец командный кадр RNR с битом Р=1, затем прекращают передачу I-кадров. Это необходимо сделать, так как подвергающиеся согласованию/индикации параметры или процедуры могут повлиять на процедуры, управляющие передачей I-кадров.
Информационное поле кадра XID используют для передачи параметров или процедур, подлежащих согласованию. После передачи кадра XID запускают таймер N401 и перезапускают счетчик повторных передач N400. Если этот кадр передают в качестве первого после фазы обнаружения, то сначала посылают комбинации флага в течение времени, достаточного для гарантированной передачи по меньшей мере 16 комбинаций флага. Получив командный кадр XID с новыми значениями параметров и процедур, УЗО возвращает эти значения в поле информации ответного кадра XID.
Если в фазе "Обнаружение" запрошена и согласована 32-битовая FCS, то вызываемая АПД будет способна проверять последующие кадры как по 16-битовой, так и по 32-битовой FCS одновременно (кадр отбрасывают, только если он не удовлетворяет обеим проверкам). До получения кадра SABME вызываемая АПД передает кадры с 16-битовой FCS. Получение кадра SABME с 16- или 32-битовой FCS указывает на использование соответствующей FCS во всех последующих кадрах (проверка кадров по обоим FCS может быть выключена). На прием другого командного кадра XID с 16-битовой FCS посылают ответный кадр XID с 16-битовой FCS.
После завершения согласования/индикации запоминают измененные значения параметров/процедур. Если в процессе изменения значений параметров или установок процедур было введено какое-либо состояние занятости, то передают индикацию об окончании состояния занятости.
Если таймер N401 досчитает до конца раньше получения ответного кадра XID, то УЗО повторно передает команду XID, перезапускает таймер N401 и увеличивает на единицу счетчик повторных передач N400. Если команда XID повторно передана N400 раз, но не получен ответ XID, то УЗО извещает инициатора согласования, что процедура согласования/индикации не завершена.
10.3 Для выхода из фазы "Согласование/индикация" необходимо наступление одного из следующих событий:
- правильный прием команды DISC (переход в фазу "Завершение логического соединения");
- правильный прием команды SABME (переход в фазу "Установление логического соединения");
- правильный прием команды DM (переход в фазу "Завершение логического соединения");
- истечение таймера Т401 (переход в фазу "Завершение логического соединения").
11 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ "УСТАНОВЛЕНИЕ ЛОГИЧЕСКОГО СОЕДИНЕНИЯ"
11.1 УЗО переходит в фазу "Установление логического соединения" при наступлении одного из следующих событий:
- прием от УПС кадра без ошибок с командой SABME;
- прием от ООД сигнала о необходимости установления соединения.
11.2 УЗО, инициатор установления соединения, передает команду SABME. Все имеющиеся особые состояния прекращаются, счетчик повторных передач N400 сбрасывается, запускается таймер Т401, все данные в очереди аннулируются. Кадр SABME всегда передается с битом Р=1 для того, чтобы избежать ошибочной интерпретации ответного кадра DM.
Если кадр SABME передается в качестве первого кадра, то сначала передается комбинация флаг в течение времени, достаточного для гарантированной передачи по меньшей мере 16 комбинаций флаг.
Получив команду SABME, противоположная станция передает ответ UA с битом F, установленным в такое же двоичное значение, как и бит Р в принятой команде SABME. Переменные V(S), V(R) и V(A) устанавливаются в нуль. Логическое соединение считают установленным и УЗО переходит в состояние "Соединено". Прекращаются все имеющиеся особые состояния и состояние "Занято" своего приемника.
Если АПД не способна установить логическое соединение, то в ответ на команду SABME передается команда DM с битом F, установленным в такое же двоичное значение, как и бит Р в принятой команде SABME.
Если ответ UA принят правильно АПД, передавшей ранее команду SABME, то эта АПД переходит в фазу "Передача информации". Отсчет таймера Т401 прекращается, переменные V(S), V(R) и V(A) устанавливаются в нуль, логическое соединение считается установленным.
Получив ответ DM с битом F=1, инициатор соединения останавливает таймер N401. Ответ DM с битом F=0 игнорируется.
Если таймер Т401 досчитает до конца, а ответы UA или DM с битом F=1 еще не получены, то повторно передается команда SABME, перезапускается таймер Т401 и увеличивается на единицу счетчик повторных передач N400.
После передачи команды SABME N400 раз, в случае неполучения ответов UA или DM, АПД переходит в фазу "Завершение логического соединения", данные в очереди отбрасываются.
Если во время выполнения фазы "Установление логического соединения" правильно принята команда DISC, то таймеры Т401 и N400 прекращают счет и АПД переходит в фазу "Завершение логического соединения".
11.3 Для выхода из фазы "Установление логического соединения" необходимо наступление одного из событий:
- правильный прием команды UA с битом F, равным биту Р в переданной команде SABME;
- передача ответа UA на правильно принятую команду SABME (переход в фазу "Передача информации");
- истечение счетчика N400 (переход в фазу "Завершение логического соединения");
- правильный прием команды DISC (переход в фазу "Завершение логического соединения");
- передача ответа DM (переход в фазу "Завершение логического соединения").
12 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ "ПЕРЕДАЧА ИНФОРМАЦИИ"
12.1 Для перехода в фазу "Передача информации" необходимо наступление одного из следующих событий:
- правильный прием ответа UA на команду SABME;
- передача ответа UA на правильно принятую команду SABME.
12.2 Для обеспечения описания и понимания процедур в фазе "Передача информации" вводят три состояния, которые полностью описывают действия УЗО:
- "Передача";
- "Занято";
- "Неприем кадра".
Каждое из состояний обусловлено наличием или отсутствием определенных искажений информации в канале связи или нарушением работы станции.
12.3 Процедуры управления в состоянии "Передача"
12.3.1 В состоянии "Передача" отсутствуют искажения информации и нарушения в работе станции. Данные, полученные от ООД, размещаются в информационном поле I-кадра и передаются в канал связи. Удаленная станция, получив I-кадр, передает содержимое его информационного поля получателю (ООД). Та же процедура происходит в противоположном направлении. Для обеспечения идентичности порядка получения данных в поле управления параметрам N(S) и N(R) присваиваются значения переменных V(S) и V(R) соответственно. В конце передачи I-кадра значение V(S) увеличивают на единицу. Во время передачи I-кадра запускаются таймер Т401 и счетчик N400. Если значение переменной V(S) равно значению V(A)+, то УЗО не должно передавать новый I-кадр, но может повторно передать I-кадры в ходе процедур исправления ошибок.
12.3.2 Когда УЗО находится в состоянии "Занято" своего приемника, то оно может передавать I-кадры, если удаленная станция не находится в состоянии "Занято".
12.3.3 При правильном приеме I-кадра (N(S)=V(R)), если УЗО на находится в состоянии "Занято" своего приемника, оно независимо от состояния восстановления по таймеру увеличивает на единицу значение своей переменной V(R) и действует следующим образом. Если в принятом I-кадре бит Р=1, то в случае, когда удаленное УЗО не находится в состоянии "Занято", передается ответ RR с битом F=1, в случае, когда после приема этого I-кадра принимающее УЗО перейдет в состояние "Занято" своего приемника, передается ответ RNR с битом F=1.
Если в принятом I-кадре бит Р=0 и УЗО не находится в состоянии "Занято" своего приемника, когда нет I-кадра для передачи или когда имеется I-кадр для передачи, но удаленный приемник находится в состоянии "Занято", то передается ответ RR с битом F=0. Когда есть I-кадр для передачи и нет состояния "Занято" удаленного приемника, то передается I-кадр, в котором значение номера N(R) равно текущему значению переменной V(R).
Если в принятом I-кадре бит Р=0 и УЗО находится в состоянии "Занято" своего приемника, то передается ответ RNR с битом F=0. Если УЗО находится в состоянии "Занято" своего приемника, то все принимаемые I-кадры отбрасываются после обновления значения переменной V(A). Всегда, когда УЗО передает I-кадр или S-кадр с командами RR, RNR или REJ, номер N(R) устанавливается равным значению переменной V(R).
12.3.4 Получив действительный I-кадр или S-кадр с командами RR, RNR или REJ, УЗО воспринимает номер N(R) этого кадра в качестве подтверждения всех уже переданных им I-кадров с номерами от N(S) до принятого номера N(R)-1 включ. Переменная V(A) устанавливается в значение номера N(R). Таймер Т401 останавливается, когда УЗО получит действительный I-кадр или S-кадр с командами RR, RNR или REJ с номером N(R), превышающим значение переменной V(A), подтверждающим в этот момент некоторые I-кадры, или S-кадр с командой REJ с номером N(R), равным значению переменной V(A), или S-кадр с командой SREJ с номером N(R), равным или превышающим значение переменной V(A), хотя номер N(R) в S-кадре с командой SREJ не имеет функции подтверждения.
12.3.5 Если S-кадр с командами RR, RNR, или REJ с битом Р=1 был передан, но не подтвержден, таймер Т401 не останавливается. Если получен действительный I-кадр и УЗО находится в состоянии "Занято" удаленного приемника, то таймер Т401 также не останавливается. Если таймер Т401 остановлен в результате приема I-кадра и S-кадра с командами RR, RNR и имеются переданные, но еще не подтвержденные I-кадры, то таймер Т401 перезапускается. Если затем таймер досчитает до конца, то, если УЗО еще не находится в состоянии восстановления по таймеру, оно перейдет в это состояние и сбросит счетчик подсчета повторных передач; если УЗО уже находится в состоянии восстановления по таймеру, то добавляется единица к значению своей переменной подсчета повторных передач. Затем, если значение переменной подсчета повторных передач меньше значения N400, то таймер Т401 запускается и, если УЗО не находится в состоянии "Занято" своего приемника, но находится в особом состоянии неприема (то есть обнаружена ошибка в порядке следования номеров N(S) и была передана команда REJ, но запрошенный I-кадр не получен), передается команда RR с битом Р=1; если значение переменной подсчета повторных передач равно N400, УЗО начинает процедуру повторного установления соединения.
12.3.6 Состояние восстановления по таймеру закончится, когда будет получен ответ RR, RNR или REJ с битом F=1. Если номер N(R) в полученном ответе находится в диапазоне от значения своей переменной V(A) до значения своей текущей переменной V(S) включ., то УЗО устанавливает значение своей переменной V(S) равной принятому номеру N(R). Если принят ответ RR или REJ, то таймер Т401 останавливается и возобновляется передача или повторная передача I-кадра. Если принят ответ RNR, то таймер Т401 останавливается и перезапускается, и УЗО приступает к установлению состояния "Занято".
12.3.7 Если таймер Т401 остановлен в результате приема ответа REJ, то УЗО:
- если оно на находится в состоянии восстановления по таймеру, прекращает все имеющиеся состоянии "Занято" удаленного приемника; значения переменных V(S) и V(A) устанавливает равным значению номера N(R), содержащегося в поле управления принятого кадра REJ; останавливает таймер Т401; если бит Р=1, то передается команда RR с битом F=1; передается I-кадр; отмечается нарушение протокола, если принят ответ REJ с битом F=1;
- если оно находится в состоянии восстановления по таймеру и принят ответ REJ с битом F=1, то прекращает все имеющиеся состояния "Занято" удаленного приемника; устанавливает значения своих переменных V(S) и V(A) равными значению номера N(R), содержащегося в поле управления кадра REJ; останавливает таймер Т401; передает I-кадр;
- если оно находится в состоянии восстановления по таймеру и принят кадр REJ, не являющийся ответным кадром REJ с битом F=1, то прекращает имеющееся состояние "Занято" удаленного приемника; устанавливает значение своей переменной V(A) равной значению номера N(R), содержащемуся в поле управления кадра REJ; если бит Р=1, то передается ответ RR с битом F=1.
При этом при передаче I-кадра учитывается:
- если в момент получения кадра REJ передается S-кадр, то его передача завершается, а затем передается запрошенный I-кадр;
- если в момент получения кадра REJ передается команда SABME или DISC, ответ UA или DM, то запрос повторной передачи игнорируется;
- если в момент получения кадра REJ не передается никакой кадр, то передается запрошенный I-кадр.
Все неподтвержденные I-кадры, начиная с кадра, указанного в принятом кадре REJ, должны быть переданы. Другие I-кадры, которые еще не передавались, передаются после повторно передаваемых кадров.
12.3.8 Если таймер N401 был остановлен в результате приема команды SREJ, то запускается таймер Т401 и повторно передается тот I-кадр, у которого номер N(S) равен номеру N(R) кадра SREJ. Никакие другие I-кадры повторно не передаются (однако могут передаваться ожидающие первичной передачи I-кадры). При передаче I-кадров учитывают все условия, описанные при приеме кадра REJ. Если процедура селективной повторной передачи не была согласована, то прием кадра SREJ рассматривают как нераспознаваемое поле управления.
12.3.9 Если таймер Т401 досчитает до конца, то УЗО переходит к процедуре, описанной выше при остановке таймера в результате приема I-кадра или команды RR или RNR.
12.4 Процедуры управления в состоянии "Занято"
12.4.1 Состояние "Занято" возникает, когда УЗО по внутренним причинам не может обработать принятый без ошибки ожидаемый I-кадр. Такой причиной может быть, например, отсутствие резервов памяти для хранения принятого I-кадра. После перехода в состояние "Занято" УЗО передает удаленному УЗО S-кадр с командой или ответом RNR.
Если УЗО не занято операцией установки режима (то есть не передает кадр SABME или DISC), то оно после приема команды или ответа RNR устанавливает состояние "Занято" удаленного приемника. Затем, если принята команда RNR с битом Р=1, то УЗО отвечает ответом RR с битом F=1 (УЗО не находится в состоянии "Занято" своего приемника), если принят ответ RNR с битом F=1, то прекращается имеющееся состояние восстановления по таймеру, номер N(R), содержащийся в этом ответе RNR, используется для обновления значения переменной V(S). Номер из команды RR или RNR, независимо от установки бита Р, не используют для обновления переменной V(S). УЗО отмечает состояние "Занято" своего приемника и не посылает I-кадры удаленному УЗО.
После этого УЗО считает номер N(R), содержащийся в принятом кадре RNR, подтверждением всех I-кадров, которые были переданы (или повторно переданы) с номерами от N(S) до номера N(R)-1 включ., устанавливает значение своей переменной V(A) равной значению номера N(R), содержащемуся в кадре RNR, перезапускает таймер Т401, если не ожидается ответный S-кадр с командами RR, RNR или REJ с битом F=1.
12.4.2 Если таймер Т401 досчитал до конца, то УЗО, если оно еще не находится в состоянии восстановления по таймеру, переходит в состояние восстановления по таймеру и сбрасывает переменную N400 или, если оно уже находится в состоянии восстановления по таймеру, то добавляется единица к своей переменной подсчета повторных передач N400. Затем, если значение переменной подсчета повторных передач меньше N400, то УЗО передает соответствующий S-кадр с командами RR, RNR или REJ с битом Р=1, перезапускает таймер Т401; если значение переменной подсчета повторных передач равно N400, то УЗО начинает процедуру повторного установления соединения.
12.4.3 УЗО, принявшее S-кадр с командами RR, RNR или REJ с битом Р=1 отвечает S-кадром с ответом RR, RNR или REJ с битом F=1, чтобы указать, находится ли еще оно в состоянии "Занято" своего приемника. Получив S-кадр с ответом RR, RNR или REJ с битом F=1, УЗО останавливает таймер Т401; если ответом является RR или REJ, УЗО прекращает состояние "Занято" удаленного приемника, после чего может передавать новые I-кадры или повторять I-кадры; если ответом является RNR, то УЗО действует так же, как описано в начале этого раздела.
12.4.4 Если S-кадры с командами RR, RNR или REJ с битом Р, установленным в 0 или 1, или S-кадр с ответом RR, RNR или REJ с битом F=0 приняты во время запроса, то УЗО:
- если приняты команда или ответ RR или REJ, прекращает состояние "Занято" удаленного приемника и, если принята команда с битом Р=1, то передает соответствующий ответный S-кадр (см. примечание) с битом F=1. Однако передача или повторная передача I-кадров не должна производиться до получения соответствующего ответного S-кадра с битом F=1 или до окончания выдержки таймера Т401;
- если принята команда или ответ RNR, останавливает состояние "Занято" удаленного приемника и, если принята команда RNR с битом Р=1, передает соответствующий ответный S-кадр (см. примечание) с 38 битом F=1.
Примечание - Если УЗО не находится в состоянии "Занято" своего приемника, но находится в особом состоянии неприема (то есть обнаружена ошибка в порядке следования номера N(S) и был передан S-кадр REJ, но запрошенный I-кадр еще не получен), то соответствующим S-кадром является кадр RR.
12.4.5 Получив команду SABME, УЗО прекращает состояние "Занято" удаленного приемника.
Если УЗО не находится в состоянии "Занято" своего приемника, но находится в особом состоянии ошибки в порядке следования номеров N(S) (то есть обнаружена ошибка в порядке следования номеров N(S), но не был передан кадр REJ), то соответствующим S-кадром является кадр RR.
Если УЗО находится в состоянии "Занято" своего приемника, то соответствующим S-кадром является кадр REJ. В остальных случаях соответствующим S-кадром является кадр RR.
12.4.6 Когда УЗО находится в состоянии "Занято" своего приемника, оно передает кадр RNR.
Кадр RNR может быть ответом RNR с битом F=0, ответом RNR с битом F=1 (переход в состояние "Занято" произошел при приеме какого-либо командного кадра с битом Р=1), командой RNR с битом Р=1 (переход в состояние "Занято" произошел при окончании выдержки таймера Т401).
Все принимаемые I-кадры с битом Р=0 отбрасываются после обновления значения переменной V(A). Все принимаемые S-кадры RR, RNR или REJ с битом Р=1 обрабатываются, значение переменной V(A) обновляется, передается ответ RNR с битом F=1.
12.4.7 Для того, чтобы сообщить удаленному УЗО об окончании состояния "Занято" своего приемника, местная УЗО передает кадр RR или, если ранее обнаруженный порядковый номер N(S) еще не был сообщен, кадр REJ с его номером N(R), равным текущему значению переменной V(R), или кадр SREJ (если его использование согласовано).
Передача команды SABME или ответа UA (в ответ на команду SABME) также указывает удаленной УЗО на окончание "Занято" собственного приемника.
12.4.8 УЗО должно иметь возможность извещать ООД о временной неспособности принимать данные по цепи 103 (состояние неготовности АПД) и распознавать соответствующее извещение от ООД (состояние неготовности ООД). Получив такое извещение АПД и ООД должны завершить передачу частично переданного знака и затем прекратить передачу данных по цепи 104(103) и заблокировать цепь 104(103) в состояние двоичной 1. После снятия состояния неготовности АПД(ООД) может восстановить передачу данных по цепи 104(103).
12.4.9 Управление передачей данных от ООД к АПД (или от АПД к ООД) может осуществляться одним из двух способов:
- использованием цепей 103 и 106: состояние неготовности АПД указывается размыканием цепи 106 и снимается замыканием цепи 106; состояние неготовности ООД устанавливается размыканием цепи 133 и снимается замыканием цепи 133;
- использованием знаков DC1/DC3 (функций Х ВКЛЮЧЕНО/Х ВЫКЛЮЧЕНО): состояние неготовности АПД указывается передачей знака DC3 и снимается передачей знака DC1 по цепи 104; состояние неготовности ООД указывается приемом знака DC3 и снимается при приеме знака DC1 по цепи 103.
Знаки DC1 и DC3, получаемые от ООД, можно, факультативно, оставлять в потоке данных. Должны обеспечиваться оба способа, но способ выбирает пользователь.
12.4.10 Время реакции АПД при указании на состояние неготовности ООД и время реакции ООД при указании на состояние неготовности АПД следует делать минимально возможными. АПД должна учитывать запаздывание ООД при опознавании указания о неготовности АПД путем приема нескольких знаков по цепи 103 после выдачи этого указания.
12.5 Процедуры управления в состоянии "Неприем кадра"
12.5.1 Состояние "Неприем кадра" возникает при наличии в кадре необнаруженной циклическим кодом ошибки, результатом которых может быть прием S-кадра или U-кадра с ненормальной длиной; прием недействительного номера N(R), прием I-кадра с полем информации, превышающим максимальную установленную длину, с полями управления, которые не определены в командах и ответах, приведенных в таблице 4.
12.5.2 Если состояние неприем кадра возникло при установленном логическом соединении, УЗО начинает повторное установление логического соединения. В остальных случаях кадр, вызвавший такое состояние, отбрасывается. Для нормальной работы приемник должен различать недействительные кадры от I-кадров, имеющих поле информации, превышающее максимальную установленную длину. Если принят двукратный самый длинный допустимый кадр плюс два октета, но не обнаружен флаг, то предполагается, что получен неограниченный кадр. Такой кадр отбрасывается.
12.5.3 Получив ответный U-кадр FRMR в состоянии "Логическое соединение", УЗО начинает повторное "Установление логического соединения".
12.5.4 Действия, которые УЗО выполняет при получении неожидаемого ответного кадра, должны соответствовать таблице 9.
Таблица 9
Неожиданный ответный кадр | Состояние "Разъединено" | Ожидание установления соединения | Ожидание освобождения соединения | Состояние "Логическое соединение" | |
Восстановление по таймеру | |||||
Нет | Да | ||||
Ответ UA F=1 | Игнорировать | Ожидаемый | Ожидаемый | Игнорировать | Игнорировать |
Ответ UA F=0 | Игнорировать | Игнорировать | Игнорировать | Игнорировать | Игнорировать |
Ответ DМ F=1 | Игнорировать | Ожидаемый | Ожидаемый | Игнорировать | Ожидаемый |
Ответ DМ F=0 | Установить соединение | Игнорировать | Игнорировать | Повторно установить соединение | Повторно установить соединение |
Ответ RR, NR, REJ F=1 | Игнорировать | Игнорировать | Игнорировать | Игнорировать | Ожидаемый |
Ответ RR, RNR, REJ F=0 | Игнорировать | Игнорировать | Игнорировать | Ожидаемый | Ожидаемый |
Ответ SREJ F=1 | Игнорировать | Игнорировать | Игнорировать | Повторно установить соединение | Повторно установить соединение |
Ответ SREJ F=0 | Игнорировать | Игнорировать | Игнорировать | Ожидаемый | Ожидаемый |
Примечание - "Ожидаемый" означает нормальную работу протокола. | |||||
12.6 Для выхода УЗО из фазы "Передача информации" необходимо наступление одного из событий:
- правильный прием от удаленного УЗО команды SABME (переход в фазу "Установление логического соединения");
- правильный прием от удаленного УЗО команды DISC (переход в фазу "Завершение логического соединения");
- получение от ООД сигнала о необходимости завершения соединения (переход в фазу "Завершение логического соединения").
13 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ "ЗАВЕРШЕНИЕ ЛОГИЧЕСКОГО СОЕДИНЕНИЯ"
13.1 Для перехода в фазу "Завершение логического соединения" необходимо: получение от ООД сигнала о необходимости завершения логического соединения или прием без ошибки команды DISC.
13.2 Процедуры управления в фазе "Завершение логического соединения" используют для возвращения к состоянию "Разъединено". Любые кадры, полученные во время процедур освобождения, кроме ненумерованных кадров, отбрасывают.
13.3 УЗО начинает процесс завершения логического соединения передачей команды DISC. Для того, чтобы избежать ошибочного распознавания принимаемого ответного кадра DM, кадр DISC всегда передается с битом Р=1. Таймер Т401 запускает и перезапускает счетчик повторных передач.
УЗО, получив команду DISC в состоянии "соединено", передает ответ UA с битом F, установленным в то же двоичное значение, что и бит Р в принятой команде DISC, и переходит в состояние "разъединено".
Если в ответ на команду DISC УЗО получит ответ UA с битом F=1 или ответ DM с битом F=1, который указывает, что удаленное УЗО уже находится в состоянии "разъединено", то оно переходит в состояние "разъединено" и останавливает таймер Т401. После этого УЗО, выдавшее команду DISC, находится в состоянии "разъединено".
Если таймер Т401 досчитает до конца раньше получения ответа UA или DM с битом F=1, то УЗО, передавшее команду DISC, повторно передает команду DISC, перезапускает таймер Т401 и увеличивает на единицу счетчик повторных передач. Если УЗО не получит правильного ответа после N400 попыток, оно переходит в состояние "разъединено".
13.4 В состоянии "разъединено" прием команды DISC вызовет передачу ответа DM с битом F, установленным в значение принятого бита Р в кадре DISC; при приеме команды SABME УЗО переходит в фазу "Установление логического соединения"; при приеме неожиданного ответа DM с битом F=0 УЗО переходит в фазу "Установление логического соединения", если оно в состоянии это сделать, в остальных случаях ответ DM игнорируется, отбрасываются кадры всех остальных типов.
ПРИЛОЖЕНИЕ А
(рекомендуемое)
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОПРЕДЕЛЕННЫЕ ЗНАЧЕНИЯ ТАЙМЕРА ПОДТВЕРЖДЕНИЯ Т401
Процедура защиты от ошибок использует таймер подтверждения Т401 для обеспечения своевременного приема подтверждения от удаленной станции. Чтобы гарантировать прием такого подтверждения до окончания выдержки таймера Т401 передатчика, нужно учитывать следующие временные факторы:
- время распространения, вносимое в передачу кадра, требующего подтверждения, - ;
- время, нужное удаленной АПД на обработку принятого кадра и формирования подтверждения, - ;
- максимальное время, необходимое для завершения передачи тех кадров, которые находятся в "передающей очереди" удаленной АПД (например кадра, который уже передается, или кадра, который не может быть переставлен), - ;
- время, нужное на передачу подтверждающего кадра, - ;
- время распространения, вносимое в передачу подтверждающего кадра, - ;
- время обработки, нужное УЗО для распознавания подтверждающего кадра, - .
С учетом значений этих временных ограничений значение выдержки таймера подтверждения Т401 должно быть не менее ![]() .
.
ПРИЛОЖЕНИЕ Б
(рекомендуемое)
ЦЕПИ СТЫКА С2, ИСПОЛЬЗУЕМЫЕ ПРИ ИСПРАВЛЕНИИ ОШИБОК
N | Описание |
103 | Передаваемые данные |
104 | Принимаемые данные |
106 | Готов к передаче |
109 | Детектор принимаемого линейного сигнала канала данных |
133 | Готов к приему |
Текст документа сверен по:
М.: ИПК Издательство стандартов, 1997
