УДК 621 31t.86.08l08J.74)
Группа 329
ГОСУДАРСТВЕННЫ И СТАНДАРТ СОЮЗА ССР»
РЕЗИСТОРЫ ПЕРЕМЕННЫЕ
ГОСТ
Методы измерения напряжения и сопротивления шумов перемещения подвижном системы
21342.6—75
переменного резистора „ . Взамен ГОСТ 11199—65
.Mcs-uivfr.cnI methods for stress and resistance of shift* электродвижущей
noises of moving system <нпы wyMOB ,p4MeT..M#I,
Постановлением Государственно»о комитета стандартов Совета Микнн| о* СССР от 9 декабря <975 г № 3821 срок действия установлен
с 01.01. 77
до. 01.01. 82
Несоблюдение стандарта преследуется по закону
Настоящий стандарт распространяется на переменные резисторы и устанавливает методы измерения напряжения и сопротивления шумо в перем ей ten пя.
Общие условия яри измерении напряжения и сопротивления шумов перемещения подвижной системы резистора по ГОСТ 21342.0—75.
Стандарт полностью соответствует публикациям МЭК 190 и 393—1.
1. МЕТОД ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ ШУМОВ ПЕРЕМЕЩЕНИЯ
I. I. Аппаратура
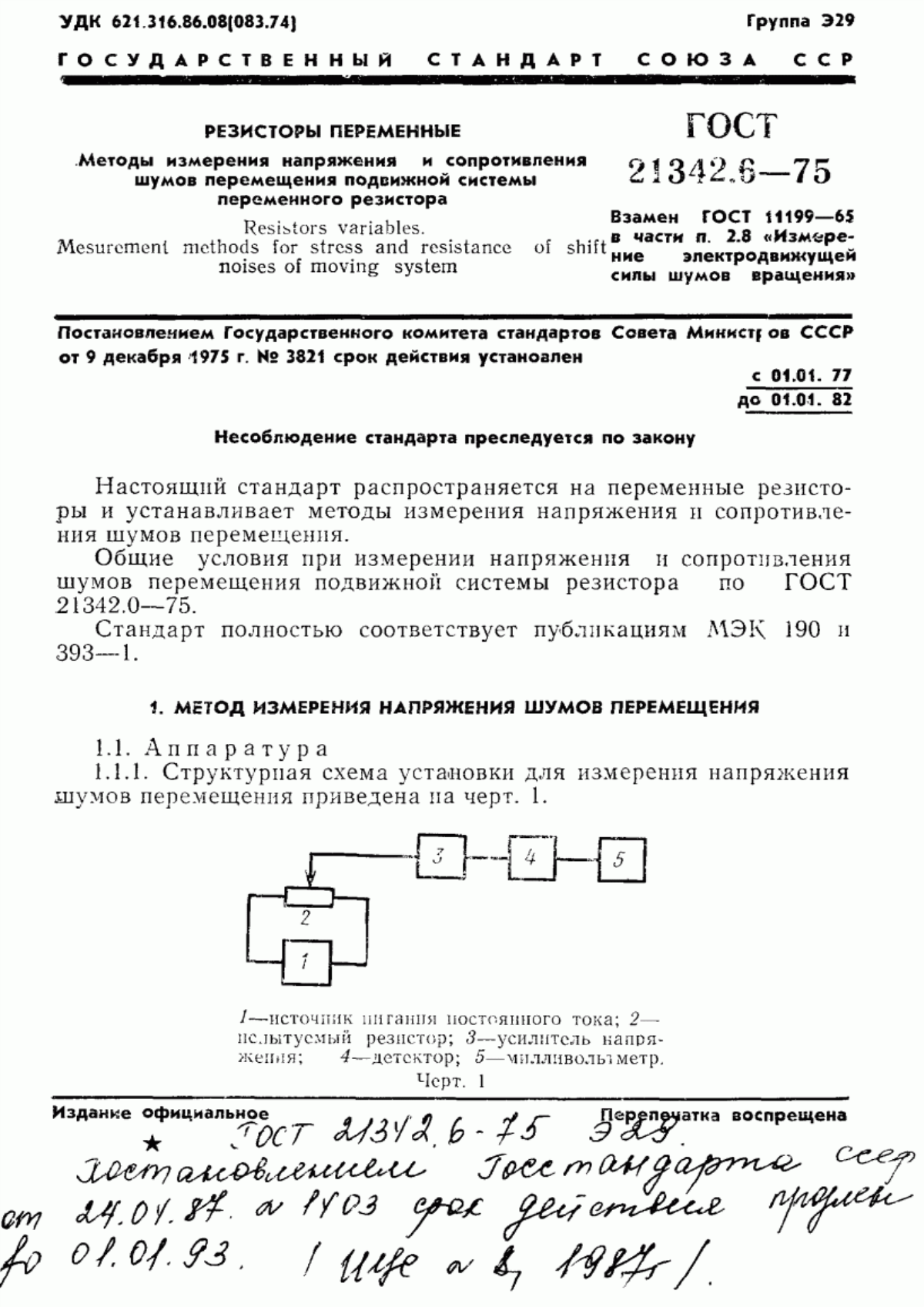
I.I.I Структурная схема установки для измерения напряжения шумов перемещения приведена ла черт. I.
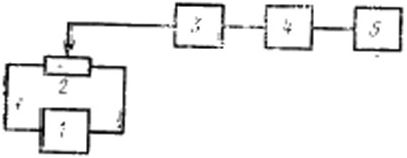
.'—лоточник питания настоянного тока: ?— испытуемый рс&ШяЩр; 3—усилшчмь напри* «синя; *7-детектор; о—милливольтметр. Черт. J
н.„_ И»»—^ ^/^ 6 . /< <^™ —
к;и^с14^лшшм^ J^^M/^a^^ с^ cw z^.^/.X л'/гм ^ е^<^а^ yt^^ Л tf Z С/. У5 / ^ ^ 4 /^ /
ГОСТ 21542.6-75 Стр 2
Напряжение и внутреннее сопротивление источника тока должны быть соответственно 20*1 В к 1000*20 Ом.
Неравномерность частотной .характеристики усилителя ле должна превышать 2 дБ в полосе частот от 600 до 1000 Гц и 5 дБ в полосе частот от 1000 до 20000 Гц.
Ослабление по отношению к частоте 1000 Гц нс должно быть более 5 дБ на частотах 60 и 2 0000 Гц и 2 0 дБ на частотах 20 и 45000 Гн п не должно быть менее 30 дБ на частотах свыше 60000 Гн.
Погрешность метода измерения должна быть в пределах ±25%.
1.2. П ров едеиие измерения
1.2.1. На выводы 1 и 3 резистора подают напряжение постоянного тока.
Подвижную систему перемещают на один цикл в во время перемещения измеряют напряжение шумов перемещения между выводами / и 2 у резисторов с функциональными характеристиками Л и В н между выводами 2 и 3 у резисторов с функциональной характеристикой Б.
Продолжительность одного цикла — 4—6 с.
2. МЕТОД ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ШУМОВ ПЕРЕМЕЩЕНИЯ
2.1. Аппаратура
2.1.1. Структурная схема установки для регистрации уровня эквивалентного сопротивления шумов перемещения приведена на черт. 2.
Ток через контактную пару «подвижный контакт — резистивный элемент»:
1,0 мА с погрешностью ±5% при напряжении на разомкнутом контакте ни более 60 В — для резисторов с момлналькыми сопротивлениями до 47000 Ом;
0.2 мА с погрешностью ±5% при напряжении на разомкнутом оптанте не более 25 В — для резисторов с поминальными сопротивлениями свыше 47 000 до 100600 0м включительно.
Погрешность метола измерения эквивалентного- сопротивления шумов перемещения должна быть в пределах ±10%.
Допускается регистрацию сопротивления шумов перемещения проводить с помощью- осциллографа с длительным послесвечением.
Схема регистрации сопротивления шумов перемещения приведена на черт. 3.
Стабилизатор тока должен обеспечивать постоянный ток:
1.0 мА с погрешностью ±5%—для резисторов с номинальными сопротивлениями до 47000 0м;
0,2 мА с погрешностью ±5% — для резисторов с номинальными сопротивлениями свыше 47000 до 100000 Ом включительно.
17
Op 3 гост 213424—7$
Минимальное входное при частоте 400 Гц.
сон ротивлени е осциллогр аф а
1,0 МОм
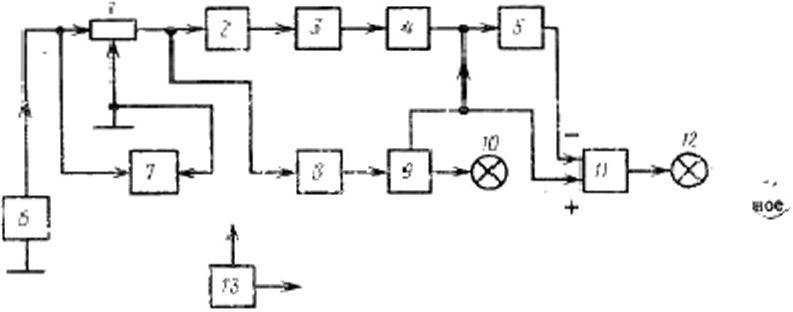
/—контролируемый резистор; 2—делитель ил пряжения; 3—усилитель импульсов; 4—пороговая схема; 5—расширитель импульсов; ff—источник постоянного тока; 7—ох метр; -^—усилитель ходкости; Р—пороговая схема; Ю—индикатор бесконечности; !Г—схема совпадении; 12—индикатор брака; 14—блок питания-
Черт. 2
2.2. Проведение из мерен и я
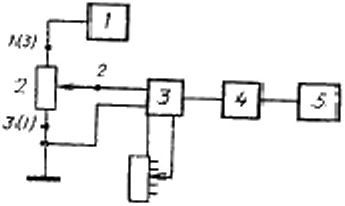
2.2.1. Выводы / и 2 или 2 и «? резистора подключают к источнику постоянного тоха, как показано на черт. 3.
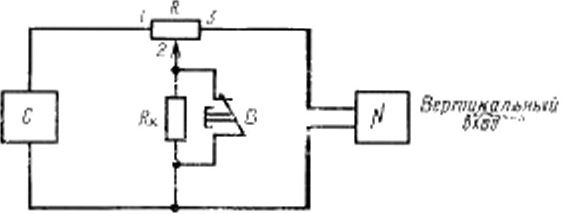
С—стабилизатор постоянного тока; Я — испытуемый резистор; /?к—калибровочный резистор; #—кнопочный выключатель; /V — осциллограф.
Черт. 3
Подвижную систему резистора перемешают по резистивному элементу, сопротивление которого составляет не менее 90% полного сопротивления к во время перемещения регистрируют экви-
18
ГОСТ 2*342.6—75 Стр. 4
валентное сопротивлении шу.миз перемещения между выводами f и 2 или 2 л 3.
Скорость перемещения подвижной системы должна быть i —10 циклов в минуту. Конкретное значение устанавливают на конкретные виды резисторов.
Перед проведением испытания с помощью осциллографа проводят калибровку шкалы в омах на экране осциллографа, для чего в схему включают калибровочный резистор R>. , погрешность которого должна быть в пределах ±10% от погрешности уровня шумов перемещения, зашунтированное кнопочным выключателем В (см. схему, приведенную на черт. 3).
Сигнал со схемы калибровки следует подавать на емкостной .ход осциллографа. В случае отсутствия у осциллографа емкостного входа, в сигнальную цепь необходима включить конденсатор емкостью 0.05—1.00 мФ.
I»
Изменение № I ГОСТ 21312.6—75 Резисторы переменные. Методы измерения напряжения м сопрел неясна я шумов перемещения подвижной системы переменного редис тора
Постай селением Государственного комитета СССР по стандартам от 28.06.82 Л» 2557 срох введения установлен
с 01-11 82
Пункт 1.1.1, Чертеж заменять коным:
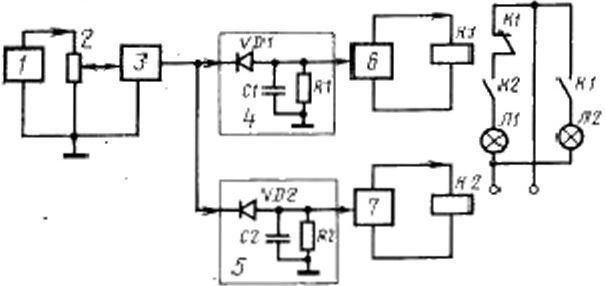
У—источник литания nocTOiHsoro тока. 2 испытуемый резистор;
3—усилитель напряжений лмременвоео гои*: С. 5—детекторы: б—пороговое устройство. паЯСтроевнсе- и» мданлый упоении, ыисряжсиия иву-моа псрсмещеияа; Т—попссоаос устройство. подстроенное на 0.1 за-липкого уровня напряжения штили геоемсаения; Kt. ^—р*де: ЛГ— лампа, фиксирующая уфОМНЬ напряжения шумов перемещении., про-оншакнциД 0.1 яяданиого. с пели.» нпджкяцяи хепришето состояния устаиован; Л2—лампа, фиксирующей» уромый напряжения шумов пе-«•M4IKWHMH. 11р4«А<ШМ»к||Я »х»амый: ЫГ>>. vn»_лоолк Tonj /3.914 Л С1, СТ—холепкаторы емкостью 4 нкф ЗсЮЧ; ЯЛ М—резисторы сопротивлением ЕВ нОм = 104.
Черт. I
(Лродыжекис см. стр. 2f2)
(Продолжение изменения к ГОСТ 21&42.6—75)
Пункт 1.2.1 Второй аОзаи изложить о новой редакции: дополнить абзацем > ^послс второго):
«Подвижную систему перемещают на один цикл и во время перемещения /определяют превышение заданного уровня напряжения шумов перемещения по * Сргбазывзшсю реле К/, включающего лампу J12, между выводами / и 2 у резисторов с функциональными характеристиками Л и В и между выводами 2 и 3 у резисторов с функциональной характеристикой Б.
* Подключение выводов у резисторов с другими функциональными характеристиками устанавливают в стандартам на резисторы хашкретных типов».
Пункт 2,2.1. Заменить слом: «конкретные виды резисторов» на «резисторы е «опкретиых типов».
(НУС № 10 1982 г.)
Изменение Ла 2 ГОСТ 21342.6 -75 Резисторы переменные. Методы измерена» напряжения к сопротивления шумов перемещения подвижной системы переменного резистора
Утверждено и введено п действие Постановлением Государспеипвго комитета СССР ио стандартам от 24 (14 37 76 1403
Дата введении 0-l.07.feS
На обложке и первой странице под обозначением стандарта указать обоз-маченае: (СТ СЭВ 5571- 8В).
Наименование стандарта изложит» в новой редакции. «Резисторы переменные .Методы контроля шумов перемещения подвижной системы
ResisIw variable. Сотого] methods for dynamic noise* of moving sistun».
Вводная часть Первый абзац изложить- и новой редакции: «Настоят** стандарт распространяет я на переменные резистор» it устанавливает методы чоптршя напряжения л соиротаялеиия шумов- перемещения подвижной системы переменного резистора»:
второй абзац. Ззмегшть слова: «условия» на «требования», «изкереияп» на -кэнтриле»;
третий абзац яз-’-ожцть в повой редакции: ^Стандарт поя и «к г ъи» оитиегст-яуег СТ СЭВ 5571—66. публикациям МЭК 1-90 и 393—1»
Разделы I. 2 изложить в новой редакция:
f Прлдо.\жение см. '. JMj
(Продолжение изменения к ГОСТ 213(2^—75)
«I. Метол контроля напряжения шумов перемещения
1.1, Принцип контроля
Метод основам на сравнения значения переменного напряжения, возникающего между вы волами / н ’ млн 2 к 3 при перемещении подвижного контакта по резистивному алементу резистора, с заданным значением, при подаче на выводы / я 3 постоянного напряжения.
1.2. Режим контроля
Напряжение шумов перемещения ^контролируют при подаче на резистор постоянного напряжении 2£ В от источника с внутренним сопротивлением JGOOOx.
1.3. Л пларатура
1.3.1. Контроль следует проводить эта устройстве, структурная слема которого приведена на тер?, t.
(Продолжение ем. с. 335)
7М
(Продолжение изменения к ГОСТ 11342.6—76]
4—асточкш постохяя-зго ■ Авряжмая; J— проверяемый резистор; ^усишшк Внукова А частоты с р«уаята₽ам уровняй ера* Оативахия: *—Дегейтер с веранммм усе-РоАсгвом. 4—индии#тор
Черт. I
13 2. Устройство должно обеспечивать контроль напряжения шумов пере-метсямя резисторов на частоте IG00 Гц по следующим Значениям: 4.7; 6Д; 19. 15, 22. 33 ; 47; 6Я; 3 00, 150; 220 нВ (эффективное значение).
13 3. Источник постоянного напряжения должен соответствовать следующие требованиям:
1) нестабильность напряжения ^0,2 В;
2) допускаемое отклонение внутреннего сопротивления =10 Ом.
1.3.4. Усилитель звуковой частоты с регулятором уровней срабатывания должен соответствовать следующим требованиям:
1) ослабление амплитудно-частотной характеристики усилителя по отношению к частоте 1000 Гц должно быть:
на Сола* 6 дБ ара чаетотях 60 Гц а Я0 иГн;
не менее 20 дБ при частотах 20 Гц и 45 кГц;
не менее 20 дБ при частотах 30 кГц н выше:
2J входное сопротивление измерительной кепи усилителя, представленное параллельным соединение* активного сопротивления м емкости, должно соот-векитпать условию С^, ^33 пф, R», а-10 Мои или 10 Л^и , в Зависимости от тоги, какое значение больше.
3} обсстнивать установление уровней срабатывания порогового устрой-стад, соответствующих значениям напряжения шумов перемещения по п. 1.3.2.
13 5. Детектор с пороговым устройством должен соответствовать следую-ЮМ требованиям:
11 обеспечивать регистрацию индикатором годных резисторов по значению напряжения шумов персмссцеиня. составляющему 8—12% от заданного для проверяемых резисторов значения напряжения шумов перемещения;
21 обеегтеншагь регистрацию индикатором брака при превышении заданного для проверяемых резисторов значения напряжения шумом перемещения
При этом должно быть обеспечено срабатывание индикатора при кратковременных шумовых сигналах. Допускаемое значение длительности шумового сигнала, снимаемого с проверяемого резистора, должно соответствовать ука-зонному в технических условиях (далее — ТУ) на резисторы конкретных типов.
13 6. Погрешность устройства контроля напряжения шумов перемещения находится в пределах Ы1)%.
II. Проведен не контроля
14 ). Устанавливают на пороговом устройстве значение напряжения шумов перемещения, соответствующее указанному а ТУ па резисторы конкретных типов.
(Продолжение см с. 336]
13 Зак. 1899 385
(Продолжение иэменсмия к ГОСТ 2(342.6—75}
1.9.2. Подключают выводы / и 3 проверяемого резистора к источнику постоянного напряжется.
1.4 3. Выводы / и 2 резисторов с линейной и логарифмической фуикило-валънымн характеристиками и выводы 2 и 3 резисторов с обратно логарифмической функциональной характеристикой подключают к входу усилителя звуковой частоты.
Подключение выводе» резисторов с другими функциональными характеристиками должно осуществляться согласно устаноалвяному в ТУ на резисторы конкретных типов.
1.4 4 Подают напряжение.
1.4.5. Перелистают подвижную систему раистора (1—6 циклов) со скоростью 2—15 циклов в минуту.
Конкретное количество циклов перемещения я скорость должки соответствовать установленному в ТУ не резисторы конкретных типов.
1.46. Контролируют напряжение шумов перемещения резисторов лрн перемещении подвижной системы в пределах 90% эффективного углового (линейного) перемещения, за исключением области срабатывания выключателя, в тс-чсннс последнего цикла перемещения.
2. Метод контроля сопротивления шумов перемещения
21. Принцип контроля
Метод «нивки на сравнении переменного напряжения, возникающего при персчсщении подвижного контакте по резистивному элементу и пропср-тюнз.тьиок» вариациям переходного сопротивления контакта с заданным значением яри прохождении через подвижной контакт постоянного токв.
2 2. Режим контроля
Сопротивление шумов перемещения контролируют при подаче на резистор постоянного тока Г который не должен превышать значений, установленных ь таблице, и значения, рассчитанного «сходя нз номинальной мощности рассеяния.
Номимяльное еолр<и»тл«мне Х^.^, Ом | Мангияюю'ое ммевм постоям-• г HUI J, мл |
До 99- | боя |
От ’.ОС) до 999 | 10.00 |
» МО’ . W IO' | 1.01 |
» 10-КР » 99 i©‘ | 0.1 • |
> 100-10’ > 2.1-10» | 0.06 |
> wo* | 0.01 |
Допускаегся к.он третировать резисторы с номинальным сопрогииемисм ст 10-10’ до 50-10’ Ом пр» токе 1 мА.
2 3. Аппаратура
23.1. Контроль следует проводить на устройстве, структурная слепа которого приволен* на черт. 2.
(Продолжение ем. о. 367}
3S0
(П^адолмыние изменения к ГОСТ Ц342.6—7Х}
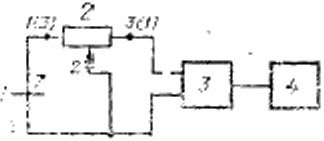
Л—«Почикк п<жтолм«ого тоже. 2- o»nej>-емм* кчиооо; J—усилитель «гараже на эаужовоВ частоты: 4—aowfo*.» yerpotena с пел «кагоров.
Черт. 2
■2.3.2. Источил* пестовый эго тока должен обеспечивать стабиаакзсть величины постоянного тока в пределах =5 %.
2.35. Усилитель напряжения звуковой: частоты с пороговым устройством должен удовлетворять следующим требованиям:
I) ширина полосы припускания при керавномсраости амилитудно-часгогн-и» характеристики усилителя не более 3 дБ должна быть:
от 90 Гц до SO кГи — для резисторов о номинальным сопротивлением до 47 кОм валют;
от 50 Ги да 5 кГа — для резисторов с номинальным сопротивлением caw ше 47 кОм;
2) ослабление вне почием должно быть (6±1,6) дБ на октаву;
(Продолжение см. с. 35$)
(Продшмеение изменения к ГОСТ 21-342.6—75)
3) входное сорропштсяне измерительно* цели усилителя, представленное олраллельимм елеязиением .активною сопротивления и емкости, должно удовлетворять условию: СВх <53 пФ, POt >10 Alox или IU/<•„„„, в здввеямссти от того, какие значение больше.
23 4 Поротное устройство с индикатором должно обеспечивать регистрацию индикатором резне.-герои при превышении заданного значения сопротивления шумов персмсзвелия.
23.5 Потрещи осн» устройства контроля сопротивления шумов перемещения находится в пределах ±£'10%.
2 4. Проведение контроля
2.4,1. Устанавливают на пороговом устройстве значение сопротивления iuy мов перемещения, соотиетстпующее указанному в ТУ на резисторы ксикрет них типов.
2 4 2. Подключают »ы*оДы 1 м 2 или 2 и 3 проверяемого резистора к нс гопнику тома.
2 4.3. Полают ток.
2.4 4 Перемещают подвижную систему резистора (1—€ циклов) со скс ростки 2—Ь5 циклов в минуту.
Конкретное количество циклов перемещения и скорость должны сошлете вовать установленным в ТУ на резисторы конкретных типов.
2.4.5 Контролируют сопротивление шумов перемещения резистора при п ремещенни подвижной системы в пределах 90 % эффективного углового (лицевого) перемещения, за исключением области срабатывания выключателя в з пение последних 1—3 циклов.
Конкретное количество циклоп-, в течение которых проводят ковгро-должно соответствовать установленному в ТУ на резисторы конкретных типо*
«МУС № 8 1967 г,)
Изменение № 3 ГОСТ 2I342.8—75- Ретмсторы переменные Методы контроля шумов перемещения подвижной системы
Утверждено м введено в действие Постановлением Государстве иного комитета СССР по стандартен ог 20.07.88 .4 ±700
Дата «ведения 01.01.8»
Вводная часть. Третий ьбтац тц-кдючни
Пункты 1 3 4, первчяслонпс 2, 2.3.3. trcp^nc"-^^ 3 наложить в козой редакции: «?) входное сопрстнв.тсиие и «мерительной цепи уси лителя, представлен-
(Продалмениг си. с. л 583
(Лрс^оякение изменения к ГОСТ 21-3-12.6—75) ное параллельным соединением активном» сопротивления л емкости, должно удовлетворять условию: С»х<33 11Ф, Лвк> 10 Я>1 О' >1
Пункты до пол шить абзацем: «Параметры усилителя напряжения звуковой частоты следует контролировать при отключенных входных долях измерительной части».
Пункт 1.3.5. Перечисление 2. Второй абзац исключить.
Пункт 2 35 перед словом «погрешность» дополнить сливом: «Основная».
СИУС № 11 1988 г.)
Изменение .4 4 ГОСТ 21342.6—75 Резисторы переменные. Методы контроля шумов перемещения подважной системы
Утверждено и введено в де Ас гене Постановлением Госстандарта России от 1».(17.»2 М 709
Дата введения 0t.01.S3
На обложке н первой странице над обозначением стандарта исключить обозначение: (СТ СЭВ- 5371-86).
__ (Продолжение с ж. с. 17В)
177
(Продолжение изменения к ГОСТ 21342 6—7,9)
Вводная часть Пенсий абик после слова «резисторов» дополнить словами: «разработанных до L9W г».
(ИУС № -10 1992 г.)
.178
СОДЕРЖАНИЕ
/ОСТ 2)3420—75 резисторы. Методы измерения электрических пврамст-> ----------. -______ Ров- ^^“^ положения........
л -roeni342J^73 Теэисторы переменные. Методы измерения переходного * '. ^^протмвленн-я контактов выключателя резистора .
/ГОСТ 213422—75 ^зкеторы переменные. Метод проверки плавности \^„ ._,. ..--. —~~—*~ изменения сопротивления . . - ь ь . t з
' ГОСТ-М343Ш-75 Резисторы переменные. Методы проверки -функциональной дарахтеристакм изменения сопротивления
, l/TOCT ЭШЕ.4—Тб-Резисторы переменные. Метод проверки разбаланса сопротивления ми отошлем ситных резисторов
1£О&-МгНМд&-—ХЗ^сзисторы переменные. Методы измерения минимального сопротивления и начального скачка сопротивления .
ГОСТ 21342.6—75 Резисторы переменные. Методы измерения напряжения и сопротивления шумов перемещения подвижной системы переменного резистора.......
I
4
7
О
12
14
16
Редактор /7. Б. Жиммская
Технический редактор-7. Б. Семемами Корректор Л). Л. Г^нзал»>^
Сд>М0 е liatop 2T.12.zi> Подл, в леч. 18.0.476 1,Н п. л. Гйр. MO0DU0X4 7 коп.
OpachO «Знак Я-ммь» «Ьдипе.чхте» чТ.! u.uiptiMi, Мссхез. Д-35Т. Hoao=pecne«<KHi пер..
Кзлзлсьоя тилопмО-ия оаидаыов. ул. Мек квас Кин. Кб. Знь. -0
